Virtual engineering of multi-disciplinary applications and the significance of seamless...
10
Future Generation Computer Systems 16 (2000) 435–444 Virtual engineering of multi-disciplinary applications and the significance of seamless accessibility of geometry data Vaibhav Deshpande a , Luciano Fornasier b , Edgar A. Gerteisen a,* , Nils Hilbrink a,c , Andrey Mezentsev a , Silvio Merazzi c , Thomas Wöhler d a Swiss Center for Scientific Computing (CSCS), 6928 Manno, Switzerland b Daimler–Chrysler Aerospace AG, PO Box 80 11 60, 81663 Munich, Germany c SMR SA, CP 4014, 2500 Bienne 4, Switzerland d FhG-IPK, Pascalstrasse 8-9, 10578 Berlin, Germany Accepted 15 October 1999 Abstract The concept of virtual engineering (VEng) can be understood as a generalization of “multi-disciplinary problem solving”, an ever more used term in scientific computing. An abstract space consisting of the physical, the geometrical, and the cost function directions, called CGP, is introduced. The VEng problem can be seen as a complex manifold embedded in this space. Common standard data formats, unified data access, as well as open, non-monolithic systems, are discussed. These contribute to smoothing the sharp edges and closing the gaps of the manifold. The significance of seamless accessibility of data is illustrated by means of the tightly coupled fluid-structure interaction in aero-elasticity. ©2000 Elsevier Science B.V. All rights reserved. Keywords: Virtual engineering; CGP space; Homeomorphism; Problem solving environment; Data management; MemCom; CORBA; CAD; CAD-repair; CAD accessibility; Topological errors; Geometrical errors; Boundary representation; NURBS; Mesh generation; Finite element simulation; Multi-disciplinary applications 1. Introduction The complexity of today’s engineering simula- tions requires that HPC (high-performance com- puting) applications can be carried out directly by end-users. The engineer needs access to all simula- tion tools — ideally in a seamless environment — in order to meet the demand for significant reduction * Corresponding author. E-mail addresses: [email protected] (V. Deshpande), [email protected] (L. Fornasier), [email protected] (E.A. Gerteisen), [email protected] (N. Hilbrink), [email protected] (A. Mezentsev), [email protected] (S. Merazzi), [email protected] (T. Wöhler). in design time as product complexity increases. The increased performance and lower prices of HPC plat- forms allow for much broader access to numerical simulation, and at the same time as numerial methods keep advancing, computational sciences move from focusing on distinct well-separated and closed prob- lems to more end-product oriented simulation tasks. Virtual engineering (VEng) is an emerging field of scientific computing and many applications are of multi-disciplinary nature. Examples of such applica- tions are the simulation of processes involving dif- ferent physical models [11], fluid-structure coupling problems in aero-elasticity [3,9,21], or macro-level optimization combining micro-level simulations with 0167-739X/00/$ – see front matter ©2000 Elsevier Science B.V. All rights reserved. PII:S0167-739X(99)00132-6
-
Upload
vaibhav-deshpande -
Category
Documents
-
view
212 -
download
0
Transcript of Virtual engineering of multi-disciplinary applications and the significance of seamless...

Future Generation Computer Systems 16 (2000) 435–444
Virtual engineering of multi-disciplinary applications and thesignificance of seamless accessibility of geometry data
Vaibhav Deshpandea, Luciano Fornasierb, Edgar A. Gerteisena,∗, Nils Hilbrink a,c,Andrey Mezentseva, Silvio Merazzic, Thomas Wöhlerd
a Swiss Center for Scientific Computing (CSCS), 6928 Manno, Switzerlandb Daimler–Chrysler Aerospace AG, PO Box 80 11 60, 81663 Munich, Germany
c SMR SA, CP 4014, 2500 Bienne 4, Switzerlandd FhG-IPK, Pascalstrasse 8-9, 10578 Berlin, Germany
Accepted 15 October 1999
Abstract
The concept of virtual engineering (VEng) can be understood as a generalization of “multi-disciplinary problem solving”,an ever more used term in scientific computing. An abstract space consisting of the physical, the geometrical, and the costfunction directions, called CGP, is introduced. The VEng problem can be seen as a complex manifold embedded in thisspace. Common standard data formats, unified data access, as well as open, non-monolithic systems, are discussed. Thesecontribute to smoothing the sharp edges and closing the gaps of the manifold. The significance of seamless accessibility ofdata is illustrated by means of the tightly coupled fluid-structure interaction in aero-elasticity. ©2000 Elsevier Science B.V.All rights reserved.
Keywords:Virtual engineering; CGP space; Homeomorphism; Problem solving environment; Data management; MemCom;CORBA; CAD;CAD-repair; CAD accessibility; Topological errors; Geometrical errors; Boundary representation; NURBS; Mesh generation; Finite elementsimulation; Multi-disciplinary applications
1. Introduction
The complexity of today’s engineering simula-tions requires that HPC (high-performance com-puting) applications can be carried out directly byend-users. The engineer needs access to all simula-tion tools — ideally in a seamless environment — inorder to meet the demand for significant reduction
∗ Corresponding author.E-mail addresses:[email protected] (V. Deshpande),[email protected] (L. Fornasier), [email protected](E.A. Gerteisen), [email protected] (N. Hilbrink),[email protected] (A. Mezentsev), [email protected] (S. Merazzi),[email protected] (T. Wöhler).
in design time as product complexity increases. Theincreased performance and lower prices of HPC plat-forms allow for much broader access to numericalsimulation, and at the same time as numerial methodskeep advancing, computational sciences move fromfocusing on distinct well-separated and closed prob-lems to more end-product oriented simulation tasks.Virtual engineering (VEng) is an emerging field ofscientific computing and many applications are ofmulti-disciplinary nature. Examples of such applica-tions are the simulation of processes involving dif-ferent physical models [11], fluid-structure couplingproblems in aero-elasticity [3,9,21], or macro-leveloptimization combining micro-level simulations with
0167-739X/00/$ – see front matter ©2000 Elsevier Science B.V. All rights reserved.PII: S0167-739X(99)00132-6

436 V. Deshpande et al. / Future Generation Computer Systems 16 (2000) 435–444
multiple objective design parameters [10,28]. How-ever, the multitude of tools needed for a single com-plex simulation creates a number of bottlenecks andassociated limitations, the major question here beinghow well these tools work together, and how to ob-tain optimal data transfer between them. Full benefitsof HPC systems can only be obtained if greater effi-ciency is introduced into the interfaces at the end-userand the applications developer level.
The importance ofproblem solving environments(PSEs) for addressing present and future challengesin computational science and engineering is clearlyidentified [27,28]. However, while emphasizing oncomputational steering, the practical significance ofan efficient data management and common data for-mats as demonstrated in [11,13,15,16,25] remainsunderestimated. In contrast, the backbone of the Eu-ropean project JULIUS [19] rigorously regards thedata flow throughout the entire simulation processchain. Cutting edge industrial end-user HPC appli-cations give the impetus to the developments withinthe JULIUS project [23], all of which require perfectaccess to all the involved data on every different level.
This paper presents ongoing activities with respectto the implementation of seamless accessibility of ge-ometry data. The essential role of the data manager isdiscussed. It provides for modularity by enabling effi-cient data interaction in multi-disciplinary simulations.Accessibility of geometry data in these applicationsis crucial, and the corresponding preparation processis described in Section 4 (CAD-repair). The relatedfunctional CAD interface, as discussed in Section 5,allows for opening the mesh generation algorithms tothe mathematics of any underlying geometry engine.Finally, the data preparation process for fluid-structurecoupling illustrates the significance of data stan-dards in an open environment. The correspondingmulti-disciplinary application consists of tightly cou-pled fluid-structure interaction in aero-elasticity.
2. Virtual engineering
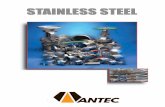
The task of engineering a real-world object can bedescribed as a complicated process where a set oftrajectories pass through an abstract space spannedby the physical direction, the geometric direction, andthe direction of a performance or cost function (see
Fig. 1. Illustration of the computational virtual engineering (VEng)problem as a complicated constraint manifold (homomorphism) inthe abstract CGP space which is formed by the geometric, physicaland cost function coordinates.
Fig. 1, [26]), henceforth called CGP (cost function, ge-ometry and physical model) space. The complete en-gineering problem then covers a certain domain withinthe CGP space and a specific solution is defined by apoint in the space. The general goal of an engineeringtask will consist of searching for performance optimaand cost function minima.
The engineering simulation task tries to follow asmooth path in order to find an optimum solution inthe complete set of all feasible technical solutions.These are mathematically represented by a homo-morphism in the CGP space. Fig. 1 shows a typicalexample of the process chain of an engineering ap-plication. Initially, the geometry may be given in aspecific machine-readable format or in the form ofdrawings resulting from ‘artistic brain storming’. Thedomain known as pre-processing encompasses thewhole preparation process for enabling a virtual de-scription of the product (CAD), and for building arepresentative numerical model that can be simulatedon the computer, e.g. a finite element or finite volumemodel. A parametrized computer model with geomet-ric as well as with physical parameters can then beused as the basis on which to perform an optimiza-tion cycle with respect to a defined cost function. Theoptimization process finally results in a new geometry

V. Deshpande et al. / Future Generation Computer Systems 16 (2000) 435–444 437
possibly together with physical parameters, or witha set of physical and geometric parameter ranges ac-cording to the constraints of a multiple objective costfunction [29]. In the ideal case, the new geometrymay be used directly by a computer aided machiningdevice for producing the final product.
By constantly enhancing HPC platforms, the sim-ulation of models with a highly increased numberof degrees of freedom, embedded in optimization ortransient analysis cycles, becomes possible. However,while technical applications tend to become increas-ingly interactive with respect to the geometry, i.e.dynamic mesh adaptation, fluid-structure coupling, orgeometric optimization, the corresponding tools forinterfacing to the geometry do not keep in pace withthe changing requirements. Thus, the virtual engineer-ing scenario as described before is a highly idealizedview. Each of the CGP space directions does alreadyhave its own specific problem areas with certaindiscontinuities, and the global abstract view of thecomplete system exhibits additional discontinuities oreven disconnected regions. While some discontinu-ities can be resolved by the introduction of interfaces,the presence of disjoint regions — as happens withregard to geometry — leads to essentially ill-posedsituations. Under this background, standard methodsfor the seamless access of geometry data are highlydesirable.
The first attempts towards a definition of unifieddata formats were made already in the late 80s [4].Standard data formats for CAD, meshes, and simula-tion results together with semi-interactive (batch exe-cutable) service modules led to a powerful tool for theintegration of problem-solving environments (PSEs)[11,13,15,16]. As data carrier for these systems theMemCom database [30] proved highly efficient. Apowerful tool in itself, the self-contained approach ad-vocated by the environment of [4] however exhibitedsome incompatibility with respect to widely acceptedgeometry standards and formats. Apart from this mi-nor flaw, the aforementioned modular data manage-ment approach clearly demonstrated the advantage ofusing common data formats in multi-disciplinary sim-ulations. Here, cooperative design and developmentbecome prerequisites, and in addition to the traditionalone-way pipeline (from preprocessing→ to computa-tion → to postprocessing) several feedback loops mayappear.
3. Data management
The Six-sense (6S) environment of the JULIUSproject [19] consists of a large number of differentmodules, e.g. CAD-repair module, mesh generationand partitioning modules, computer supported collab-orative work (CSCW) modules, and computationalservice libraries such as the fluid-structure interface.These modules are inter-operable through a com-mon data format and a data management system forstoring, retrieving, and manipulating data. While thedatabase is accessed by means of the MemCom datamanagement system [30], data are distributed amongthe modules by a CORBA [24] based data-bus whichsteers and monitors in a heterogeneous network, andby MemCom for tightly coupled HPC applications,MemCom being a proven high-performance solutionon HPC platforms.
3.1. The MemCom system
The MemCom data manager has been developedfor numerical simulations like finite element analysisand pre-and postprocessing in modular distributed en-vironments. The requirements upon a data manager innumerical analysis are specific: it must be capable ofdealing with large objects like vectors, matrices, andhyper-matrices. These typical data objects found innumerical analysis can be manipulated very efficientlywithin MemCom. MemCom stores data in standardbinary form according to the ANSI/IEEE 754 stan-dard either in ‘big-endian’ or ‘little-endian’ format,thus ensuring efficient access to binary data as wellas portability. A MemCom data base can be accessedin stand-alone mode or by means of a client–serveraccess model. In stand-alone mode an application islinked to the data manager server library, thus form-ing one single program. Data are then exchangeddirectly, i.e. without any intermediate control. This isthe most efficient way of working with the data base,the only drawback being limited concurrent access.In the client–server model the application programattaches itself to one or several servers which in theirturn will access the data base, thus ensuring concur-rent data access, however at the expense of efficiency.A CORBA-based server is under preparation as partof the JULIUS project.

438 V. Deshpande et al. / Future Generation Computer Systems 16 (2000) 435–444
In contrast to other data management systems,MemCom does not only handle pure data base accessoperations, like store and retrieve, but it also allowsfor data management in the application program. Spe-cific functions automatically load data objects to theapplication and data objects loaded in applicationscan be controlled one by one or in groups. Data canalso be accessed in paged i/o mode, this feature be-ing particularly important for i/o optimization or incases where the data sets are larger than the availablememory in a specific platform. MemCom does notprovide a data design language: applications interactdirectly with the data manager to create objects suchas vectors, matrices, or associative arrays. Interactionoccurs by means of the application program interface(API). Currently, a C/C++ and a FORTRAN APIare provided. Likewise, a data browser allows forinteractive monitoring of data bases.
3.2. 6S extensions
An outline of a typical data flow through 6S isshown in Fig. 2. Simultaneous access to the computa-tional and geometrical data of the model is providedvia the MemCom backbone. Inter-operability betweenthe JULIUS CORBA architecture and the traditionalclient–server is achieved by introducing an additionalcontroller. In practical terms the MemCom databasehas been hidden behind a hierarchical setup of classes
Fig. 2. Schematic data flow for the 6S environment. Although showing a typical scenario, the view is largely simplified. More complexfeedback loops between the different modules occur in real world multi-disciplinary applications (see also Section 6 and [12]).
which can be transferred, in parts or whole, to therequesting CORBA client [24]. Hence, the design issuited for both procedural and object oriented pro-gramming. It is to be stressed that CORBA in itselfdoes not provide the means for efficiently implement-ing the required data structures, and that, in its presentform, CORBA is not suited for high speed HPC com-munication. MemCom and CORBA are therefore tobe considered complementary.
Additional extensions consist of application pro-gram interfaces to end-user customized data formats.These include, besides some specific traditional FE(finite element) data objects and the input of IGES orSTEP files [22], an advanced geometry format derivedfrom boundary representation (Section 4). It is alsoworth mentioning the possibility to keep track of therelation between the original CAD data and the subse-quent surface meshes (see Fig. 4). This information isestablished automatically during the mesh generationprocess. Thus, the open architecture, together with theCAD-repair functionality and its advanced geometrydata format accessible via MemCom, constitute anessential step towards virtual engineering.
4. CAD-repair
The CAD model is imported into the 6S CAD-repairmodule by converting it to the ACIS boundary rep-

V. Deshpande et al. / Future Generation Computer Systems 16 (2000) 435–444 439
Fig. 3. Two examples of badly meshable geometry (BMG) parts.The taper face (left) is a typical example leading to undesirablepoint distribution in the mesh, and it can impact thep-completenessof typical incremental meshers. The rivets (right) may need tobe resolved when targeting CSM, whereas a carpeting may benecessary for a CFD calculation.
resentation (BREP) geometry format [1], see Fig. 2.Due to their limitations, the exchange formats (such asIGES), presently do not exploit the high level modelsemantic of BREP and hence different errors such asgaps, incorrect topology of trimming curves, etc. getintroduced. These errors lead to certain problems inthe VEng downstream applications, the latter requiringcontinuity of the object boundary (FE, rasterization,CAM). Based on user supplied tolerances the repairsoftware detects and heals defects semi-automatically[2,5,20], though even a completely waterproof modelmay still contain artifacts which are undesirable, herereferred to as badly meshable geometries (BMG) asshown in Fig. 3. Another issue is model reduction anddomain specific preparation. In fact, some of the de-tails of a complete geometry model are of no interestfor a domain of application, like fluid dynamics, but ofgreat significance for another one, like structural me-chanics. Thus, the initial CAD model is naturally splitinto a heterogeneous model. Care must then be takento ensure that the original model hierarchy can be re-assembled after having traversed a simulation cycle.
4.1. Software design
As a consequence of the complexity and the mul-tiple objectives of CAD-repair, automatic featuresare supplemented by direct user interaction. TheCAD-repair module provides for three different andcomplementary user interfaces, a graphical user inter-face (GUI), a scripting user interface (SUI) and a 3Dinterface (3DI) (see [7,17] for more detail). The rea-son for providing three different user interfaces (UIs)is that each of these has its own strength: The 3DIprovides proximity information for the area which
requires user intervention, the GUI contains an objectbrowser to provide complementary topological andnon-viewable information of the same area, and theSUI provides access to the CAD-repair kernel func-tions. In addition, the SUI is a powerful tool for steer-ing the CAD-repair process, allowing for modifying,extending, and tailoring the CAD-repair functional-ities, and for interfacing with an external control orassistance module such as the Active EngineeringAdvisor of the 6S environment.
4.2. Model healing
The absence of topological structure informationfor geometric elements in current transfer formats(such as IGES) leads to model semantic loss. How-ever, the complete assemblage can also consist ofseveral genuinely disconnected parts. In such cases,model reduction and preparation (MRP) is imperativefor a reasonable definition of topological healing.In addition, the use of a ‘pre-healed’ model can bebeneficial in the MRP phase. Thus, the differentCAD-repair functions are concurrent and all of themmay depend on the downstream applications.
The geometric validity itself is attained by meansof a two-stage verification and repair scheme. Theessential step during the verification stage consistsof detecting face adjacency within the user-definedtolerances [20] discovering geometrical and topo-logical errors, of BMGs, and of amending attributesto the data structure by marking the type of defect.After completion of the subsequent automatic repairprocess, the remaining model deficiencies need tobe eliminated by direct user interaction. A multitudeof different algorithmic solutions are available, andmodularity is ensured by separating invariant verifi-cation from context dependent modules reflecting therequirements of specific applications.
4.3. Complementary model object tree
While the practical engineer prefers to think inconstructive units such as fuselage, wing, etc. (incase of an aircraft design), the healing algorithms arebased on local proximity considerations. For combin-ing both viewpoints, a complementary model objecttree (CMOT) is introduced which, in addition to the

440 V. Deshpande et al. / Future Generation Computer Systems 16 (2000) 435–444
ordinary geometry based entities (patches, lines, etc.)typifies two alternative elements — the constructiveand the super-element. Typically, the constructive ele-ment is generated during the MRP phase, whereas thesuper-element is closely related to BMGs. The newelements also define a hierarchy, from constructiveelement via super-element to the trimmed surfacepatch.
Both new elements contribute to significantly im-prove the CAD-repair process. Evidently, the proxim-ity detection can be enhanced by assigning differenttolerances to distinct constructive-elements. The roleof the super-element consists of combining several dis-tinct patches in the neighborhood of a BMG (see Fig.3) to a single geometric entity without carpeting. Infact, the CAD-mesh interface is responsible for han-dling super-elements like a normal surface patch. Inaddition, the mesher can be tailored to specific geom-etry classes via the constructive element.
5. CAD-mesh interface
Maintaining the fidelity to the original geometrymodel is one of the basic issues of mesh generation.In theory, the accessibility of the native geometry for-mat is given in monolithic systems, but usually thegeometry data are transformed into an internal repre-sentation by converters (e.g. via IGES), if no access
Fig. 4. Schematic data flow for the mesh generation CAD interface and its embedding into the JULIUS 6S environment. Note that therelation between the CAD and mesh data objects is maintained by the interface.
to the native format of the different geometry enginesis available [18]. This conversion is commonly carriedout with very high order splines to avoid too many dis-similarities from the original design. The other issueis that — although a certain fidelity of the geometrycan be assured within the system — the relational in-formation between the surface grid points and the cor-responding geometry patches is lost when the mesh iswritten into the format of a specific downstream ap-plication program.
In fact, this information loss creates some imma-nent problems further down from the initial monolithicmesh generation. For instance, high fidelity of the geo-metry cannot be assured during the application ofmesh adaptation or alteration techniques, and the ac-tual discrete representation potentially diverges fromthe original geometry. Interrelations are maintained bythe CAD-mesh interface in accordance with an openVEng system which offers smooth and seamless dataaccess, along with the basic surface mesh and the orig-inal geometry data objects. This complementary in-formation is referred to as reference tuples (Fig. 4).The surface mesh generation is typically carried outin the parametric space of generally trimmed surfacepatches. Thereby, the mesh density and the shape ofelements in the physical space is controlled by the in-troduction of distribution functions and sometimes bytaking into account the metric of the local mapping[6,14]. Examples of typical geometry operations are

V. Deshpande et al. / Future Generation Computer Systems 16 (2000) 435–444 441
Fig. 5. Illustration of fluid-structure coupling (CFD–CSM). The communication process is depicted for one iteration cycle where the dataflow is indicated by the arrows. The shaded region denotes the geometry based neutral interface realized in the NURBS parametric space.
the projection from parametric to physical space andvice versa, the computation of the normals in physi-cal space, etc. The current interface design suggests apurely functional approach where the actual underly-ing geometry engine is hidden, access to the geometrybeing provided to the mesh generation developer inthe form of a library.
Although the present developments are based on thestandard 6S data formats — actually NURBS [22] forthe geometry (Fig. 4) — the more abstract functionalapproach of the mesh interface should allow for es-tablishing the connection between any mesh generatorand any geometry engine. Having in place the standardinterface specification, all tool developers can thenindependently develop their specific mathematicalalgorithms.
6. CFD–CSM data processor
As an example — others are given in [11–13,15,16] —of the significance of seamless data access throughoutthe CGP space, the fluid-structure (CFD–CSM) cou-pling is considered. A tightly coupled CFD–CSMapproach is required in aero-elasticity where the inter-action between computational fluid dynamics (CFD)and computational structural mechanics (CSM) takesplace during the transient simulation. The interactionis such that the aerodynamic loads induce elastic
deformations in the structure, the structural deforma-tions induce a change in the external aircraft geome-try, and the geometrical shape modifications lead tomodified aerodynamic forces (Fig. 5). In addition, themodularity of the integrated application needs to bemaintained. Accordingly, a separate processor in theform of an interface data preparation library is envi-sioned which makes use of the common data carrierMemCom [30].
Many references can be found which deal with thesimulation of aero-elastic deformations, see for in-stance [3,9,21]. One common problem in the generalcase of more complex geometry models, however, isthe link between the different domain specific repre-sentations of the respective solutions on the shared ge-ometry parts. The points and elements of the CFD andCSM meshes are in general not coincident, usuallythey differ largely in density, size, and type. Simulta-neously, ad-hoc interpolation of solutions leads to un-desirable non-conservative effects during the transientsimulation. A neutral layer is introduced to incorpo-rate the original surface geometry. The subsets of theCFD grid and the CSM grid on the shared geometryparts are both mapped to the NURBS [22] parametricspace. Subsequently, an integration scheme can beimplemented which, to a certain extent, ensures theconservation of moments and forces. Vice versa, thestructural deformations are represented in the ge-ometry model by refitting the NURBS according to

442 V. Deshpande et al. / Future Generation Computer Systems 16 (2000) 435–444
the given displacements at structural nodes. Afterre-matching the mesh of the flow domain, one feed-back loop is accomplished (Fig. 5). The illustratedcoupling cycle, in turn, can be iterative if applied inan implicit fashion.
Prototype implementations have been carried out onthe basis of a public domain geometry library [8] es-pecially designed for multi-disciplinary applications.The tests were carried out on a standard wing geom-etry (Onera-M6) discretized by means of a structuredmesh. The representation of the mesh and aerody-namic loads on a common parametric NURBS spaceis operational. Further work dealing with unstructuredmeshes is in progress.
7. Conclusion
The present paper shows that multi-disciplinaryapplications require a higher abstraction level (CGPspace) compared to the traditional task of establishinga theoretical model for a distinct physical problem.It has been discussed how common standard dataformats, unified data access and open non-monolithicsystems can contribute to smoothing the sharp edgesand disconnected regions of a complete engineeringproblem.
The application of the different data managementand geometry related tools has been illustrated byan aero-elasticity example. The extension of theMemCom data manager towards widely acceptedstandards in combination with the tools developed inthe JULIUS project could potentially develop into astandard European framework. The BREP+ geometryrepresentation is an extension to presently availablestandards such as IGES. The JULIUS consortiumstrives to influence the emergence of future STEPdevelopments.
Acknowledgements
JULIUS is embedded in the Fourth Framework Pro-gramme of the European Comission, RTD in Informa-tion Technology Domain 6, HPC Simulation and De-sign, Primarily Task 6–3. The support of JULIUS bythe CEC, as well as the financial contribution of the
CEC, of the Swiss Government, and of the industrialpartners is acknowledged.
References
[1] ACIS-3D Toolkit User Guide, Spatial Technology Inc.,Version 4.0, 1998.
[2] G. Barequet, Using geometric hashing to repair CAD objects,IEEE Comput. Sci. Engrg. 4 (4) (1997) 22–41.
[3] J.T. Batina, Unsteady Euler algorithm with unstructureddynamic mesh for complex aircraft aeroelastic analysis,AIAA-89-1189-CP, 1989.
[4] E. Bonomi et al., Astrid: A Programming Environment forScientific Applications on Parallel Vector Computers, PlenumPress, New York, 1990.
[5] G. Butlin, C. Stops, CAD data repair, in: Proceedings ofthe Fifth International Meshing Roundtable, Sandia NationalLaboratories, October 1996, pp. 7–12.
[6] O. Hassan, N.P. Weatherill, J. Peraire, K. Morgan, E.J.Probert, Generation and adaptation of unstructured meshes,COSMASE Course on Grid Generation, CERFACS, February1995.
[7] V. Deshpande, E. A. Gerteisen, N. Hilbrink, S. Merazzi,A. Mezentsev, Sixth-sense (6S) — an integrated problemsolving environment, in: Proceedings of the Swiss CAD/CAMConference, Nevchâtel University, Switzerland.
[8] Spline Geometry Subprogram Library, Theory Document,Version 3.5, Boeing Information & Support Services, withcontributions of D. R. Ferguson, Th. A. Grandine, F. W.Klein, R. Ames, September 1997.
[9] Computational Fluid Dynamics’98 — Session on CFDin fluid/structure interaction, Fourth European FluidDynamics Conference, September 1998, Wiley, New York,1998.
[10] Computational Fluid Dynamics’98 — Session on impact ofevolutionary computing in flow engineering, SpecialTechnology session on real world CFD optimization problem,Special Technology sessions on industrial design usingparallel CFD, Fourth European Fluid Dynamics Conference,September 1998, Wiley, New York, 1998.
[11] W. Egli, U. Kogelschatz, E.A. Gerteisen, R. Gruber, 3Dcomputation of corona, ion induced secondary flows andparticle motion in technical ESP configurations, J. Electrostat.40/41 (1997) 425–430.
[12] L. Fornasier, E.A. Gerteisen, S. Merazzi, Multi-disciplinaryapplications using the MemCom data management system, in:Proceedings of the Swiss CAD/CAM Conference, NevchâtelUniversity, Switzerland.
[13] R. Gruber, W. Egli, E. Gerteisen, G. Jost, S. Merazzi,Problem-solving environments: towards an environment forengineering applications, SPEEDUP J. 9 (1995) 13–15.
[14] P.L. George, Automatic mesh generation, Application to FiniteElement Methods, Wiley, New York, 1991.
[15] E. Gerteisen, R. Gruber, S. Merazzi, Domain decomposition:theory and practice, Comput. Phys. 11 (1) (1997) 26–30.

V. Deshpande et al. / Future Generation Computer Systems 16 (2000) 435–444 443
[16] E.A. Gerteisen, R. Gruber, Computational environment basedon domain decomposition approach, in: Proceedings of theNinth International Conference on Domain Decomposition,Wiley, New York, 1996.
[17] E.A. Gerteisen, N. Hilbrink, A.A. Mezentsev, Th. Wöhler,CAD repair for discrete simulation methods, in: Proceedingsof the Swiss CAD/CAM Conference, Nevchâtel University,Switzerland.
[18] ICEM CFD/CAE, Installation Guide, ICEM CFDEngineering, CA, USA, 1996.
[19] JULIUS (Joint Industrial Interface for End-User Simulations)Project, ESPRIT 25050, Technical Work Programme, Parts 1and 2, October 1997 (see also www.6S. org).
[20] F.-L. Krause, Ch. Stiel, J. Luddemann, Processing of dataconversion, verification and repair, in: Proceedings of theFourth Symposium on Solid Modeling and Applications 1997,pp. 248–254.
[21] R. Löhner, C. Yang, J. Cebral, J.D. Baum, H. Luo,D. Pelessone C. Charman, Computational Fluid DynamicsReview 1995, Wiley, New York, 1995 (ISBN 0-471- 95589-2).
[22] L. Piegl, W. Tiller, The NURBS Book, 2nd ed., Springer,Berlin, 1997 (ISBN 3-540-61545-8).
[23] J. Murphy, D. Rowse, L. Fornasier, Ph. Thomas, A.Kamoulakos, E.A. Gerteisen, JULIUS Project — ESPRIT25050 Joint Industrial Interface for End-User Simulations[CrossCuts — the newsletter of CSCS/SCSC, vol. 7, No. 2,October 1998].
[24] R. Orfali, D. Harkey, J. Edwards, Instant CORBA, Wiley,New York, 1997 (ISBN 0-471-18333-4).
[25] Diane Poirier, Steven R. Allmaras, Douglas R. McCarthy,Matthew F. Smith, Fancis Y. Enomoto, The CGNS System,AIAA-98-3007, 1998.
[26] Pierre Perrier, New data-base concepts for CFD validation,ECCOMAS 1998, Wiley, New York, 1998.
[27] S.G. Parker, C.R. Johnson, D. Beazley, ComputationalSteering Software Systems and Strategies, IEEE Comput. Sci.Engrg. 4 (4) (1997) 50–59.
[28] J.R. Rice, R.F. Boisvert, From scientific software librariesto problem-solving environments, IEEE Comput. Sci. Engrg.3 (3) (1996) 44–53.
[29] D. Spicer, J. Cook, C. Poloni, P. Sen, EP20082Frontier: industrial multiobjective design optimization, FourthEuropean Fluid Dynamics Conference, Wiley, New York,1998, pp. 546–551.
[30] S. Merazzi, The MemCom User Manual, B2000 Data Accessand Data Description Manual, SMR Corporation, Bienne,Switzerland, 1995.
Vaibhav Deshpande is a Research Sci-entist at the Swiss Center for ScientificComputing (CSCS), Switzerland and hasbackground in the field of applied me-chanical engineering, related specially tothe use of computational fluid dynam-ics (CFD) and high performance comput-ing for solving industrial problems. He ispresently responsible for CFD user sup-port at CSCS. His research interests in-
clude CAD modeling, mesh generation and numerical techniquesin multi-disciplinary applications. He has a master’s degree inAeronautical Engineering from IIT, Bombay.
Luciano Fornasier holds a Dipl. Ing. de-gree in aeronautical engineering of thePolytechnic of Turin, Italy. In 1975 hejoined Aeritalia (now Alenia) as Aerody-namicist. In 1981 he moved to the Theo-retical Aerodynamics Department of MBB(now Dasa) and became responsible for thedevelopment and application of linearisedpotential flow simulation methods, from1991 to 1995 he was heading the CFD
group. After a period at the Conceptual Design Department man-aging the Project Analysis Group, he is presently Project Leaderwithin the Flight Physics Department. He is author and co-authorof published technical papers on the following subjects: CFD anal-ysis and design methods, applied aerodynamics, geometry genera-tion, CAD–CAF interfaces, integrated design simulation tools andmethodologies.
Edgar Gerteisen studied aerospace engi-neering at the University of Stuttgart from1979 to 1986 with consolidation in ap-plied mathematics, computer science, andgas- and aerodynamics. From 1986 to 1993he was employed at Dornier LuftfahrtGmbH. For his work on time-accurateNavier–Stokes simulation methods in theTheoretical Aerodynamic Department hereceived his Dr. Ing. degree from the Uni-
versity of Stuttgart. At CSCS since 1994, he is conducting indus-trial collaboration projects mainly in the field of multi-disciplinaryapplications. Presently, his major interest of research are geome-try interactive applications such as adaptive meshes, fluid-structurecoupling, and shape optimization, as well as the engineering datamanagement in general.
Nils Hilbrink was born in Hengelo, theNetherlands on 29 March 1972. He got hisMaster of Science degree in aerospace en-gineering at the Delft University of Tech-nology (TUD) in Delft, the Netherlands.After the completion of his degree in 1997Niels has worked for the Swiss Centrefor Scientific Computing (CSCS/SCSC) inManno, Switzerland, and is currently em-ployed as a Research Engineer by SMR
SA in Bienne, Switzerland.

444 V. Deshpande et al. / Future Generation Computer Systems 16 (2000) 435–444
Silvio Merazzi holds a Dipl. Ing. de-gree from the Eidgenoessische TechnischeHochschule in Zurich, Switzerland and aPh.D. from the Ecole Polytechnique Fed-erale de Lausanne. He has around 25years of experience in developing numer-ical simulation programs applied to solidmechanics and other fields like fluid dy-namics and coupled problems. He is oneof the originators of the MemCom data
management system. Since 1980 he has an independent activitywith SMR SA, Bienne, Switzerland, where his main fields of in-terest include the development and the application of numericalsimulation program systems, user interfaces, and graphics.
Andrey Mezentsev received his BS, MSand Ph.D. degrees in mechanical engi-neering from Moscow State Technical(Bauman) University in 1984, 1986, and1994, respectively. He worked as Re-search Scientist for Moscow State Techni-cal University in 1986–1997, performingnumerous industrial projects in mechani-cal, aerospace, petrochemical engineeringdomains. His specialization is interdisci-
plinary simulation of complex technical systems on different levels
of abstraction. Currently, he is Senior Research Scientist in SwissCenter for Scientific Computing (CSCS). His current researchfocuses on CAD geometric model preprocessing for finite elementdownstream applications, straight coupling of geometric modelswith the mesh generation algorithms, aero-elasticity.
Thomas Wöhler was born in 1968, stud-ied “Information technology in mechanicalengineering” at the Technical UniversityBerlin and received his Dipl. Ing. degreein 1997. Since April 1998 he is working asa Research Officer at IPK in the DivisionDesign Technology. His current researchinterests are feature modeling and featurerecognition for five-axis milling, CAD dataexchange and CAD model preparation.