
Aeroelasticità e Acustica Nelle Strutture Aerospaziali by de Rosa

VINAGVision/INS Integrated Navigation
Assisted
Via Provinciale Pianura 2, Zona Industriale San Mar tino int 23 – 80078 Pozzuoli (Naples) ITALY Tel. +39 0815263475 Fax +39 0815262701 - e.mail : i [email protected] - web page : www.tsd-space.it
Assisted by GNSS

DATI RELATIVI AL PROGETTODATI RELATIVI AL PROGETTO
Tematica prescelta : NAVIGAZIONE SATELLITARE – UTILIZZO DELLE INFRASTRU TTURE DI
NAVIGAZIONE EUROPEE EGNOS E GALILEO
Titolo del progetto : Vision/INS Integrated Navigation Assisted by GNSS
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
Acronimo : VINAG
Co-proponenti: � Space Technology srl (ST), � Politecnico di Milano (PoliMI) - Dipartimento di Scienze e Tecnologie Aerospaziali
Durata del progetto : 30 mesi

OBIETTIVI DEL PROGETTO OBIETTIVI DEL PROGETTO
� Le diverse tecnologie oggi disponibili per affrontare il problema della
navigazione di un veicolo spaziale presentano ciascuna delle limitazioni
� Obiettivo del progetto è di sviluppare un sistema di navigazione integrata
Vision/INS/GNSS in grado di raccogliere i vantaggi delle diverse tecnologie
compensandone le limitazioni
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
� In applicazioni spaziali che richiedono elevata autonomia, precisione, robustezza,
flessibilità di utilizzo, adattabilità a diversi scenari, quali navigazione di prossimità
in orbite LEO e MEO, in particolare per missioni di “in orbit servicing”, “debris
removal”, l’integrazione di più sistemi di navigazione risulta senza dubbio più
efficace dell’utilizzo di una singola tecnologia
� I sistemi di navigazione integrata Vision/INS, tipicamente adottati per tali
applicazioni, operano senza il supporto di alcuna informazione assoluta e di
conseguenza forniscono una soluzione di navigazione affetta da inevitabili drift

OBIETTIVI DEL PROGETTO OBIETTIVI DEL PROGETTO
� Sebbene in origine progettati come sistemi di navigazione terrestre ed
aeronautica per uso militare, oggi i Global Navigation Satellite Systems (GNSSs)
come GPS, GLONASS e i futuri BeiDou e Galileo possono essere considerati degli
efficienti sistemi per supportare un considerevole numero di applicazioni
spaziali, grazie alla loro capacità di fornire dati per la determinazione della
posizione, della velocità e del tempo
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
� In situazioni di scarsa visibilità dei satelliti GNSS, quali le applicazioni spaziali in
orbite basse caratterizzate da very high dynamics, o al di sopra dell'orbita dei
satelliti GNSS con segnali molto deboli, o in presenza di qualsiasi struttura
ostruente, puo’ risultare difficile l’acquisition e tracking di quattro o piu segnali
GNSS e di conseguenza impossibile determinare la posizione via GNSS
� Tuttavia, un numero limitato di satelliti GNSS può essere efficacemente utilizzato
per migliorare le performance di un sistema di navigazione vision based,
integrando i dati di navigazione vision-based con le seppur limitate misure GNSS

ARCHITETTURA ARCHITETTURA H/W DI H/W DI VINAGVINAG
� VINAG è un sistema modulare composto
da:
o VINAG Central Unit
o VINAG Camera System
� L’unità centrale di VINAG include i
seguenti moduli:
o VISNAV & Data Fusion Module
(VDFM)
o Inertial navigation system (INS)
Module
GNSS Receiver Module
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
o GNSS Receiver Module
o Power Conditioning & Distribution
Module (PCDM)
� Il VDFM è il “core” del sistema VINAG, esso
ha una triplice funzione:
o Image acquistion dal Camera
System
o Image processing per la
navigazione (3D vision, Feature
Extraction& Tracking)
o Data fusion (implementazione
algoritmi per la fusione dei dati di
Vision, INS e GNSS)

PRELIMINARYPRELIMINARY DATA FUSIONDATA FUSION
� Le misure del sottosistema di
visione (cinematica dei feature
points) vengono predette
utilizzando le misure della
piattaforma IMU e quindi fuse
con le stesse (Kalman Filter)
� La soluzione Vision/INS viene fusa
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
� La soluzione Vision/INS viene fusa
attraverso un altro Kalman Filter
con le misure GNSS
(presudorange e doppler shift )
� Mentre le misure del sistema di
visione e dell’IMU sono affette da
un drift il ricevitore GNSS fornisce
misure assolute non affette da un
errore di una precedente misura

ARCHITETTURA DI VINAGARCHITETTURA DI VINAG
� VINAG utilizzerà il
Camera System e il
modulo di
processing per
l’esecuzione degli
algoritmi di Vision-
based Navigation
che TSD ha
sviluppato con il
Progetto MOSS
(Multi-Ocular Smart
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
(Multi-Ocular Smart
System) nell’ambito
del primo bando ASI
per PMI del 2010
MOSS Camera System e Unità di Processing per Vision-based Navigation

CONFIGURAZIONE MODULO VDFMCONFIGURAZIONE MODULO VDFM
� Il modulo VDFM è composto dai
seguenti elementi :
o mother board per
l’implementazione delle
funzioni di “unit control &
communication” e di
esecuzione degli algoritmi di
data fusion
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
o daughter board per
l’esecuzione degli algoritmi di
navigazione
� L’utilizzo del “cross-strapping” e di
FPGA RAM based rende possibile la
realizzazione di un modulo
completamente configurabile e
“fault-tolerant”

CONFIGURAZIONE MODULO VDFMCONFIGURAZIONE MODULO VDFM
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
Il modulo VISNAV & Data Fusion Module (VDFM) può ricevere segnali simultaneamente da
1 camera multioculare e 2 camere monooculari, oppure da 4 camere monoculari

CONFIGURAZIONE MECCANICA DI CONFIGURAZIONE MECCANICA DI VINAGVINAG
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
� Dal punto di vista meccanico VINAG sarà basato su di una configurazione
“conduction-cooled” a stack che consente di minimizzare massa e volume ed
offre elevata affidabilità termostrutturale
� Il routing delle linee di potenza e dati saranno implementati attraverso un PCB
flessibile

VALENZA INNOVATIVAVALENZA INNOVATIVA
� Il prodotto proposto si presenta come un sistema di navigazione completo,
proprietario, sviluppato interamente in Italia ed ITAR free, tecnologicamente
avanzato rispetto a tutti quelli disponibili, tipicamente ancora basati sull’utilizzo
di singole tecnologie o comunque non integrate strettamente in un unico
autonomo sistema
� Le diverse tecnologie considerate, Visione, navigazione inerziale e GNSS
presentano caratteristiche complementari; ad esempio i sensori inerziali
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
presentano caratteristiche complementari; ad esempio i sensori inerziali
rendono possibile una elevata frequenza di aggiornamento della misura,
particolarmente importante nelle fasi di prossimità, ma soffrono dell’errore di
drift, mentre il GNSS offre misure prive di drift ma presenta un limitato rate di
aggiornamento. L’integrazione Vision/INS/GNSS consente di migliorare le
prestazioni ottenibili dai singoli sottosistemi in termini di accuratezza, rate di
aggiornamento e stabilità della prestazione
� Il sistema VINAG dispone di una notevole capacità di processing real time che
gli consente di implementare un ampio spettro di algoritmi, in grado di
soddisfare i requisiti di svariati scenari operativi

SCENARI APPLICATIVISCENARI APPLICATIVI
� Il sistema di navigazione proposto mira a sviluppare e consolidare una tecnologia
per la navigazione, la guida e controllo di sistemi orbitanti a piccole distanze
relative, con attenzione ai seguenti scenari operativi:
� cluster di oggetti orbitanti target (T) – chaser (C): T attivo + C attivo (satellite +satellite)
• On orbit servicing� refuelling\repair
• Formation Flying\Sciami
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
• Formation Flying\Sciami
• Integrazione in orbita �docking robotico
� Coppia di oggetti orbitanti target (T) – chaser (C): T passivo + C attivo(satellite dismesso\ debris\Asteroide + satellite)
• Hovering attorno a Debris per ispezione e cattura per rimozione da orbita
• Rendez-vous & landing su Asteroidi di piccola taglia

SCENARI APPLICATIVI SCENARI APPLICATIVI -- RequisitiRequisiti
� La scelta e realizzazione del software di navigazione relativa saranno guidate dai
seguenti requisiti funzionali e di performance:
• Ricostruzione completa dell’assetto, della posizione e della velocità relativa
del target rispetto al chaser
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
• Carico computazionale ridotto per consentire l’elaborazione on board in
tempi compatibili con l’evoluzione della dinamica relativa
• Robustezza alle incertezze\errori di modello\misura e failure tolerant
• Ricostruzione delle proprietà geometriche e inerziali del target, qualora si
tratti di oggetto inattivo o naturale ( asteroide)

FlussoFlusso di di definizionedefinizione e e svilupposviluppo deglidegli algoritmialgoritmi
Identificazione dei requisiti funzionali e di prestazione per il sistema di RelNav
Identificazione dello scenario applicativo significativo
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
Analisi e selezione dell’agoritmo di image processing
Analisi e selezione dell’algoritmo di filtraggio
Implementazione e test dell’architettura algoritmica selezionata

SPACEBORNE GNSS RECEIVER CORE TECHNOLOGYSPACEBORNE GNSS RECEIVER CORE TECHNOLOGY
Il dimostratore del Ricevitore Spaceborne, che verrà sviluppato da SpaceTechnology (ST) per la messa a punto degli algoritmi per la Navigazione LEO, e’una versione modificata del ricevitore GPS-GAL L1 già sviluppato da ST nell’ ambitodei Contratti ESA EGEP-12 EGNOS Regenerative Paylod e ESA TRP INSPEC.
A tale core verrà aggiunta una nuova unità di Processing con la funzione di FastAcquisition Unit (FAU) necessaria per l’ acquisizione di segnali di Navigazione conelevate dinamiche Doppler, tipiche delle applicazioni LEO.
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
elevate dinamiche Doppler, tipiche delle applicazioni LEO.
Per quanto riguarda gli algoritmi di Tracking, l’ attuale versione del Ricevitore GNSSdi ST, essendo stata concepita per applicazioni di Frequency e Time Transfer dielevata accuracy in Tracking, e’ basata su un elevato numero di campioni per chip(60 campioni per chip).
L’ accuracy in Tracking della Core Technology a 60 campioni per chip e’ mostratanelle due Slide successive
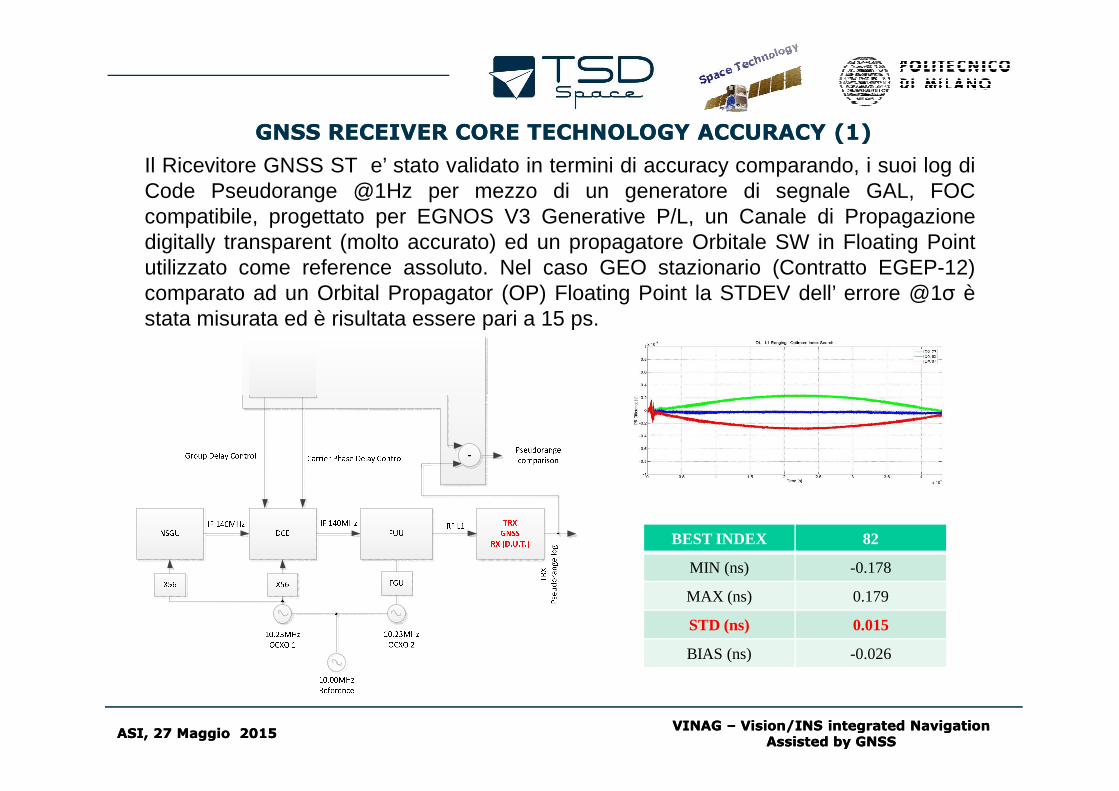
GNSS RECEIVER CORE TECHNOLOGY ACCURACY (1)GNSS RECEIVER CORE TECHNOLOGY ACCURACY (1)
Il Ricevitore GNSS ST e’ stato validato in termini di accuracy comparando, i suoi log diCode Pseudorange @1Hz per mezzo di un generatore di segnale GAL, FOCcompatibile, progettato per EGNOS V3 Generative P/L, un Canale di Propagazionedigitally transparent (molto accurato) ed un propagatore Orbitale SW in Floating Pointutilizzato come reference assoluto. Nel caso GEO stazionario (Contratto EGEP-12)comparato ad un Orbital Propagator (OP) Floating Point la STDEV dell’ errore @1σ èstata misurata ed è risultata essere pari a 15 ps.
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
BEST INDEX 82
MIN (ns) -0.178
MAX (ns) 0.179
STD (ns) 0.015
BIAS (ns) -0.026

GNSS RECEIVER CORE TECHNOLOGY ACCURACY (2)GNSS RECEIVER CORE TECHNOLOGY ACCURACY (2)
Lo stesso ricevitore ST con diverse bande dei loop e con Delta PR rate read out a 10Hz(ovvero 10 PR fix per secondo) è stato testato nel contratto ESA EGEP-81 (Inter SatelliteLinks i.e. MEO to MEO PVT) nel seguente high dynamic propagation channelmaximum Signal Delay Range to 224 ms (240 ms – 16 ms) twice as wider than EGNOS GEO PR delay absolute valuemaximum Doppler Rate Range +/-1420 Hz/sec Doppler excursion +/-1.89MHz >> LEO +/-80KHz Doppler dynamicDelay Rate +/-83.7 us/sec which exceed by at least three times the maximum ISL specified MEO to MEO dynamic
Nel caso MEO-MEO (Contratto EGEP-81) comparato ad un OP Floating Point la STDEVdell’ errore @1σ è stata misurata, ed è risultata essere pari a 350 ps.
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS

VINAG GNSS RECEIVER FW DESIGN (1)VINAG GNSS RECEIVER FW DESIGN (1)
Nell’ ambito del contratto VINAG il core receiver FW design sara’ modificato in accordoalla seguente strategia:
- core receiver a 6 campioni perchip per ridurre la complessità efavorire l’ implementazione suFPGA di volo
- Introduzione di un Fast AcquisitionUnit processing front end (FAU
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
vedi figura a destra) necessariaper ridurre drammaticamente itempi di acquisizione in dinamicaLEO, ed avere una completaautonomia di funzionamentosenza Acquisition Aiding da partedi sensori inerziali e/o PropagatoriOrbitali controllati dal GroundSegment che consentano comeaccade oggi per tutti i GNSS LEORX di ridurre lo spazio di ricerca(codice, frequenza).

VINAG GNSS RECEIVER HWVINAG GNSS RECEIVER HW--FW GROUND VALIDATION & FUTURE LEO FW GROUND VALIDATION & FUTURE LEO PLATFORMSPLATFORMS
Nell’ ambito di questo contratto, oltre a validare il design degli algoritmi attraverso undimostratore HW basato su una Software Define Radio platform di proprieta’ ST (Fig. in bassoa sinistra), si sviluppera l’ EM di un LEO receiver basato su FPGA commerciali con equivalentidi volo ed RF Front Chip set discreto commerciale con equivalenti di volo, testato soltanto alivello elettrico a causa delle limitazioni di budget imposte dalla call.
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS

MODALITA’ DI VERIFICA DEL GNSS LEO RX (1)MODALITA’ DI VERIFICA DEL GNSS LEO RX (1)
Nell’ ambito di questo contratto il dimostratore del LEO receiver sarà testatoutilizzando un HW/SW test bench come quello di sotto riportato dove il NavigationPlayer sara’ pilotato da messaggi reali provenienti da Satellite In Space acquisiti edemodulati SW per mezzo del Navigation Recorder. Il Player e Recorder sono giàstati sviluppati da ST in altri contratti ESA (vedi Slide successiva). Sul segnalerimodulato dopo il Recording, verra’ aggiunto un canale MEO-LEO SWarbitrariamente configurabile che consentirà un agile debugging della FAU e tuningdelle bande dei loop su dinamiche Doppler di tipo LEO per il nuovo real time Trackera 6 campioni per chip.
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS

MODALITA’ DI VERIFICA DEL GNSS LEO RX (2)MODALITA’ DI VERIFICA DEL GNSS LEO RX (2)
ST ha gia’ sviluppato i prodotti di RF Player e Recorder da utilizzarsi per il test dell’unita’ GNSS di VINAG. Tali prodotti sono comprensivi di RF Front end e siinterfacciano direttamente con Antenne di Navigazione COTS consentendo di fare ilplaying e recording dual carrier L1 ed E6 a 6Msps o 60Msps (rate selezionabili daGUI a seconda delle applicazioni) di segnali di Navigazione Pubblici (6Msps) o PRS(60Msps).
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS

INTEGRAZIONE PER VERIFICA NEL BENCH VINAGINTEGRAZIONE PER VERIFICA NEL BENCH VINAG
Il dimostratore del GNSS LEO Receiver singolo canale basato su scheda STS4MDM1.5 (nickname P3U) verra’ integrato nel bench VINAG utilizzato per la verificadi Fusion degli algoritmi di Navigazione.
Un piastrino di adattamento delle interfacce elettriche digitali verrà fornito, comeaccessorio, da ST ai fini di una corretta integrazione elettrica con l’ unità VINAG.
L’ RF Player verra’ utilizzato nel bench VINAG per emulare il segnale di Navigazione
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
L’ RF Player verra’ utilizzato nel bench VINAG per emulare il segnale di Navigazionericevuto dal Ricevitore LEO con le opportune dinamiche Doppler e PR.
Il prototipo EM di volo, verrà testato elettricamente solo a basso livello

IL TEAM DI PROGETTOIL TEAM DI PROGETTO
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS

MILESTONES & DELIVERABLESMILESTONES & DELIVERABLES
MILESTONE TEMPO Obiettivi della milestones DELIVERABLE S
KOM - Kick off
T0
SRR –System requirementreview
T0 + 3 mesi
Consolidare i requisiti derivanti da un’attenta comprensione degli scenari operativi prefigurati e definire i dati di base per la progettazione
� System RequirementDocument
PDR –Preliminary Design Review
T0 + 9 mesi
Consolidare l’architettura della piattaforma definendo le specifiche tecniche delle parti componenti. Aver selezionato e sviluppato preliminarmente in ambiente Mathlab/simulink gli algoritmi per valutarne l’impatto in termini di risorse HW e SW per la loro implementazione
� Architectural design Report
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
CDR – Critical Design Review
T0 + 15mesi
Aver completato il progetto di tutti isottosistemi e sviluppato completamente gli algortimiinambiente Mathlab/simulink.
� Design Report� AIT/AIV plan
TRR – Test readinessReview
T0 + 27 mesi
Aver realizzato tutti I sosttosistemicomplete di SW e VHDL, averli testate in modalità stand alone ed averli integrati per poter eseguire la campagna di test e validazione sulla base di adeguate test procedures
� Test procedures� EM VINAG� Test Equipment
FR – FinalReview T0 + 30 mesi Sulla base dei risultati dei test reports effettuare la validazione di VINAG, identificare un coerente Piano di sviluppo per completare una implementazione di volo e riportare ad ASI sui risultati complessivi del programma
� Test & Validation report

SCHEDULESCHEDULE
Progetto: VINAG - Vision/INS integratedNavigation Assisted by GNSS
Pacco di Azienda/Ente/U.tà Anno III1 2
Anno II3 41 2
WP 2102 TSD
CRONOPROGRAMMA
TSD
TSD
WP 1102
2
WP 2101
Space Technology
1Anno I
Poli MI
WP 5103
TSD
WP 1101
WP 1103 TSD
3
Poli MI
WP 5102
WP 5101
WP 3103 Space Technology
Poli MI
4
Space Technology
WP 1104
WP 3101
WP 3102
TSD
Trimestri/Semestri
ASI, 27 Maggio 2015 ASI, 27 Maggio 2015 VINAG VINAG –– Vision/INS integrated Navigation Vision/INS integrated Navigation
Assisted by GNSSAssisted by GNSS
MILESTONE (1, 2, .. ) (indicare con M1, M2..ecc.)
WP 6102 Poli MI
WP 2103
Poli MI
WP 4101
WP 4103
WP 6101
Space Technology
Space Technology
Space Technology
TSD
M1 SRR
M2 PDR
WP 4102
WP 4104
Space Technology
WP 2104 TSD
M3 CDR
M4 TRR
M5 FP
. However, these](https://static.fdocuments.in/doc/165x107/5a78840e7f8b9a77438e240b/chapter-11-benchmarking-coreacuk-di-milano-milano-italy-e-mail-paolocremonesipolimiit.jpg)

















