
Viewpoint Entropy-driven Simplification Pascual Castelló 1, Mateu Sbert 2, Miguel Chover 1 and...
21
Viewpoint Entropy-driven Simplification Pascual Castelló 1 , Mateu Sbert 2 , Miguel Chover 1 and Miquel Feixas 2 1 Universitat Jaume I de Castelló, Spain January 29 - February 1, 2007 2 Universitat de Girona, Spain WSCG ’ 2007
-
Upload
bertram-francis -
Category
Documents
-
view
215 -
download
1
Transcript of Viewpoint Entropy-driven Simplification Pascual Castelló 1, Mateu Sbert 2, Miguel Chover 1 and...
Viewpoint Entropy-driven SimplificationPascual Castelló1, Mateu Sbert2, Miguel Chover1 and Miquel Feixas2
1Universitat Jaume I de Castelló, Spain
January 29 - February 1, 2007
2Universitat de Girona, Spain
WSCG ’ 2007

Introduction-Most simplification methods use some geometric distance to guide the
simplification process
-Recently, some works have been done to develop methods guided by visual error metrics
-In some applications, for example video games, the main requirement is visual similarity. Models often come from CAD programs and are constructed by assembling smaller objects which can become partially hidden during joining operations.
-We propose a new simplification method which produces approximations, closer to the original model, according to visual criteria. Our algorithm uses the viewpoint entropy which is based on the Information Theory to develop a simplification error metric.

Background-The most important improvement in geometric-based simplification
algorithms was to incorporate mesh attributes such as color, normal and texture (Progressive Meshes [Hop99], QSLIM [Gar98])
-[Lin00] developed the first image-based simplification algorithm which guided the simplification using a pure image metric.
-[Lue01] presented a method to perform a view-dependent polygonal simplification using perceptual metrics. These metrics measure the perceptibility of the visual stimuli in humans.
-Recently, some works add a measure of visibility in a geometric algorithms. For example: [Zha02] uses a visibility map together with QSLIM and [Lee05] uses a saliency map also with the QSLIM algorithm.
-Viewpoint Entropy was successfully used in viewpoint selection and scene understanding and virtual exploration ([Vaz01, Vaz03, Sbe05]), but has never been used to develop simplification metrics at the moment

Viewpoint Entropy• Definition
The Viewpoint entropy is defined from the relative area of the projected polygons over the sphere of directions centred in the viewpoint v.
Nf number of polygons in the scene
ai projected area of polygon i over the sphere
a0 projected area of background in open scenes at total area of the sphere
The best viewpoint is the one that has maximum entropy, i.e., maximum information captured.
fN
i t
i
t
iv
a
a
a
aH
0
log

Simplification Error Metric• The simplification error metric is defined by the sum of variations of viewpoint
entropy for all viewpoints V
Vv
vv HHc ,'Where: Hv is the viewpoint entropy before an edge collapse H’v is the viewpoint entropy after
H0=1.434227
H’0=1.358059
C0=0.076168
C0=0.126523
H’0=1.307704
Worst edge collapse
Best edge collapse

Simplification Algorithm 1/4
e
v
u ue(u,v)
Half edge collapse
The half-edge collapse operation. In this example the edge e(u, v) is collapsed into vertex u, but could also be collapsed into v
By using half-edge collapses it is possible to reuse the simplification process in order to generate multiresolution models. These models can use the current hardware in a more efficient way because no new vertices are added to the original mode In order to choose the best direction we used the approach [Melax98] that takes into account the triangle normals to measure the curvature. The best direction is the one that has the least curvature.

Simplification Algorithm 2/4
Edges adjacent to vertices adjacent to vertex v
An edge collapse in our algorithm could, in principle, affect the cost of anyremaining edge.At each step we only choose a small group of edges that are affected by an edge collapse and then the cost for these edges is recalculated.
v
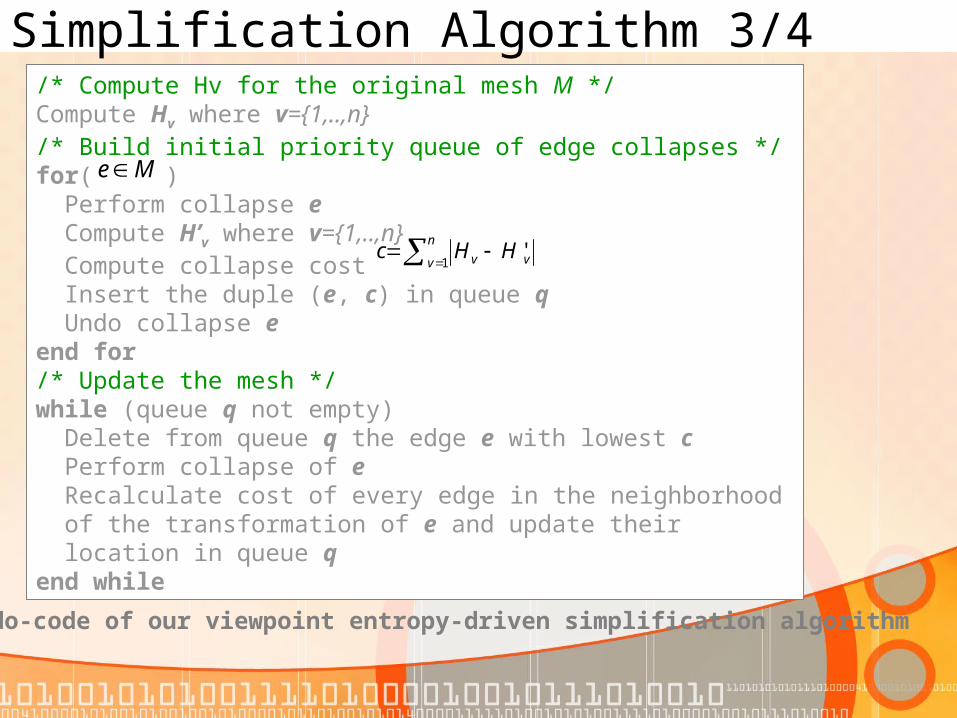
Simplification Algorithm 3/4/* Compute Hv for the original mesh M */Compute Hv where v={1,..,n}/* Build initial priority queue of edge collapses */for( ) Perform collapse e Compute H’v where v={1,..,n} Compute collapse cost Insert the duple (e, c) in queue q Undo collapse eend for/* Update the mesh */while (queue q not empty) Delete from queue q the edge e with lowest c Perform collapse of e Recalculate cost of every edge in the neighborhood of the transformation of e and update their location in queue qend while
Pseudo-code of our viewpoint entropy-driven simplification algorithm
n
v vv HHc1
'
Me

Simplification Algorithm 4/4
• Updating Projected Areas
Image on the left shows the Octopus model, the triangles surrounding the edge collapse are marked in blue.Image on the right shows in red the window which is used to obtain the new projected areas for blue triangles.
Edge collapse

Experiments
-Carried out using a Xeon 2.4 GHz 1GB RAM with an NVIDIA 7800 GTX 512MB PC
-20 viewpoints regularly distributed over a sphere
-Resolution: 256x256 images
-OpenGL Vertex Buffer Objects and Framebuffer Objects
-C++ implementation with OpenGL
To measure the quality of our results:
-QSLIM [Gar97], a geometric simplification algorithm
-METRO [Cig98], a mesh comparison tool (geometric error)
-RMSE [Lin00], we have implemented this metric to measure the visual error
Results 1/9
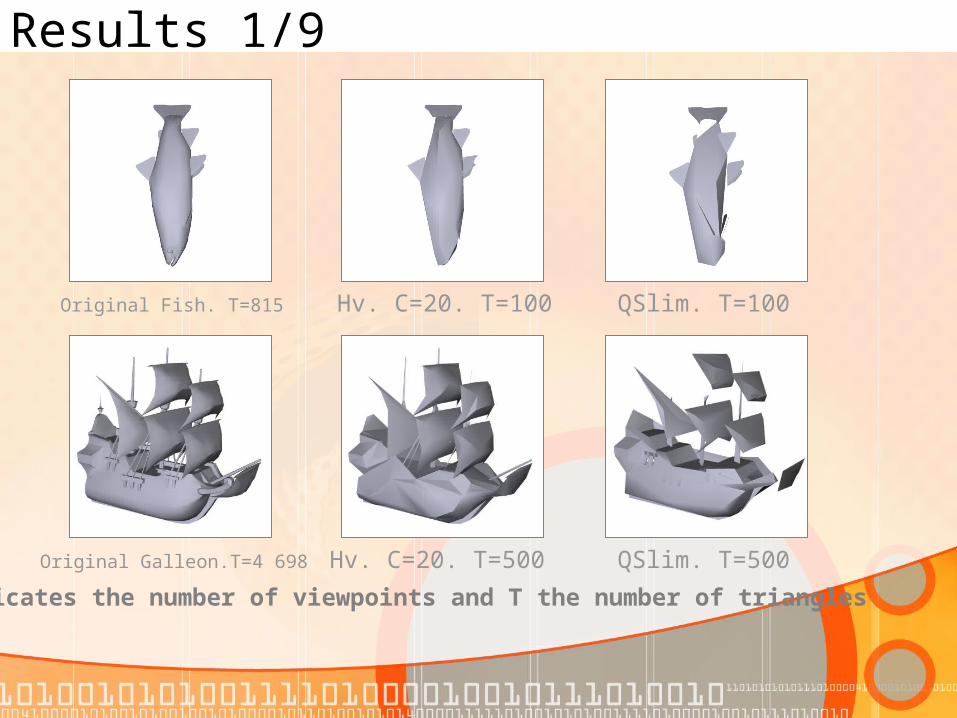
Original Fish. T=815 Hv. C=20. T=100 QSlim. T=100
Original Galleon.T=4 698 Hv. C=20. T=500 QSlim. T=500
C indicates the number of viewpoints and T the number of triangles

Results 2/9
Original Fracttree. T=4 806 Hv. C=20. T=1 200 QSlim. T=1 200
Original Galo. T=6 592 Hv. C=20. T=500 QSlim. T=500
Original Octopus. T=8 468 Hv. C=20. T=1 000 QSlim. T=1 000

Results 3/9
Original Big_porsche. T=10 474 Hv. C=20. T=1 000 QSlim. T=1 000
Original Unicycle. T=13 810 Hv. C=20. T=1 000 QSlim. T=1 000

Results 4/9
Model Triangles Error
Original Final Hv QSlim
Fish 815 100 11,40 22,83
Galleon 4 698 500 17,74 36,84
Fracttree 4 806 1 200
30,19 34,10
Galo 6 592 500 9,03 12,40
Octopus 8 468 500 17,35 25,84
Big_porsche 10 474 1 000
7,48 8,28
Unicycle 13 810 1 000
10,32 11,06Errors measured with RMSE for all models

Results 5/9
Model Triangles Error
Original Final Hv QSlim
Fish 815 100 0,05 0,09
Galleon 4 698 500 0,11 0,22
Fracttree 4 806 1 200
0,08 0,12
Galo 6 592 500 0,03 0,05
Octopus 8 468 500 0,09 0,16
Big_porsche 10 474 1 000
0,04 0,10
Unicycle 13 810 1 000
0,03 0,07
Errors measured with Metro for all models

Results 6/9
Model Triangles Time
Original Final Hv QSlim
Fish 815 100 11.16 0.02
Galleon 4 698 500 92.64 0.06
Fracttree 4 806 1 200
96.30 0.08
Galo 6 592 500 152.29 0.08
Octopus 8 468 500 224.89 0.09
Big_porsche 10 474 1 000
299.47 0.13
Unicycle 13 810 1 000
451.76 0.20Simplification times measured in seconds for all models

Results 7/9
0
5
10
15
20
25
30
35
40
4000 3300 2600 1900 1200 500Model size (triangles)
RM
SE
Hv
QSlim
0,00
0,05
0,10
0,15
0,20
0,25
4000 3300 2600 1900 1200 500Model size (triangles)
ME
TR
O
Hv
QSlim
Visual errorGeometric error
These figures show how Hv acts at several degrees of simplification for the Galleon model

Results 8/9
Close-ups of Unicycle model simplified with Hv at very early degree of simplification
Original Unicycle model on the left and simplified with Hv (C=20. T=8 958) on the right, both without rim
Original Unicycle model on the left and simplified with Hv (C=20. T=8 958) on the right

Results 9/9Time (seconds)
0
100
200
300
400
500
600
0 5 10 15 20 25 30 35 40 45
Number of Cameras
Galo
Big_porsche
These figures show how our method behaves when the number of viewpoints is changed.
20 viewpoints are enough to achieve an adequate simplification.With more viewpoints, the temporal cost is higher (almost two times) but there is not a substantial increase in visual quality.
RMSE
0,000
2,000
4,000
6,000
8,000
10,000
12,000
0 5 10 15 20 25 30 35 40 45
Number of Cameras
Galo
Big_porsche
Conclusions-A new simplification method based on viewpoint entropy is proposed for polygonal meshes.
-Our simplified models have lower visual and geometric error than the QSlim method
-Our approach achieves very good results with CAD models. These models are composed of different pieces that are assembled together, thus presenting a lot of hidden zones and this is where our algorithm hits harder.
-The main drawback is the high temporal cost compared to geometric-based simplifications.
-The bottleneck mainly resides in the GPU and the bus traffic.

Future Work-Make a study with other metrics based on information theory such as Kullback-Leibler distance and mutual information, which can also be applied to the simplification framework.
-Incorporate mesh attributes such as color and texture.


















