
VIBRAZIONI MECCANICHE - diim.unict.it · Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 13 / 29...
28
VIBRAZIONI MECCANICHE Sistemi vibranti ad un grado di libertà Oscillazioni forzate
Transcript of VIBRAZIONI MECCANICHE - diim.unict.it · Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 13 / 29...

VIBRAZIONI
MECCANICHE
Sistemi vibranti ad un grado di libertà
Oscillazioni forzate

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 2 / 29
Now you want to analyze the dynamic behavior of a
vibrating system such as the one previously studied
also subject to an external forcing F (t) function of time.
k
, ,x x xm g
r
Elementary forced oscillator
(t)F
- linear systems
- superposition of effects

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 3 / 29
Generic function:
k
, ,x x xm g
r
Elementary forced oscillator
(t)F
00
t(t) cosi i
i
F F n
00 01 02 2
0
(t) cos t cos 2 t
cos tn n
F F F F
F n
it can be represented by the Fourier series:
( , ) (t)F define in
simpler:
We analyze the system shown
schematically in the figure, excited by a
harmonic forcing:0(t) cos tF F

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 4 / 29
Elementary forced oscillator
The equation of dynamic equilibrium of the system,
always starting from the condition of static
equilibrium, it results::
0 cos tF k x r x mx
2 02 cos tF
x x xm
0 cos tmx r x k x F
and dividing all the members for the mass m:
where: km
2
rm
or:
k x
, ,x x x
m x
r x
(t) cos t0F F

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 5 / 29
Elementary forced oscillator
k x
, ,x x x
m x
r x
0(t) cos tF F
(t) (t) (t)g px x x
(t) cos tpx H

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 6 / 29
Elementary forced oscillator
Both the shift scheme xp that the forcing F(t) F (t) can
be represented in the plane of the Gauss-Argand
(r,i), as vectors of amplitude H e F0, , rotating with
equal angular velocity and phase shifted between
them by an angle equal to ψ.
i
r
cos tH
0 cos tF
t
0F
H
The integral xp satisfies the equation of motion for the
particular values of H e ψ:
0
2 22
FH
k m r
2
rtg
k m

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 7 / 29
Elementary forced oscillator
2 221 2
sxH
a a h
2
2
1
a htg
a
Introducing the following reports:
a
c
rh
r 0
s
Fx
k
i
r
cos tH
0 cos tF
t
0F
H

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 8 / 29
Elementary forced oscillator
0
1
2
3
4
5
6
0 1 2 3 4
a
h = 0,1
h = 0,3
h = 0,6
h = 0,8
s
H
x
fattore di amplificaziones
H
x

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 9 / 29
Oscillatore elementare forzato
0
1,57
3,14
0 1 2 3 4
a
ψ
h = 0,1
h = 0,3
h = 0,6
h = 0,8
Dall’analisi dei predetti diagrammi si nota come questi si possano dividere in tre
zone fondamentali, alle quali corrispondono comportamenti della massa diversi
tra di loro:

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 10 / 29
Oscillatore elementare forzato
0
1
2
3
4
5
6
0 1 2 3 4
a
h = 0,1 h = 0,3 h = 0,6 h = 0,8
s
H
x
0
1,57
3,14
0 1 2 3 4
a
ψ
h = 0,1 h = 0,3 h = 0,6 h = 0,8

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 11 / 29
Oscillatore elementare forzato
1) a 1 , pF x
0F
HF
px
til ‘fattore di amplificazione’
è prossimo all’unità 1
s
H
x
l’angolo di fase tende a zero 0
Cioè l’ampiezza della vibrazione forzata è
quasi uguale allo spostamento che si
avrebbe se una forzante di ampiezza F0
fosse applicata staticamente (il sistema si
comporta come se il collegamento fosse
infinitamente rigido);
t
0F
H
i
r

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 12 / 29
Oscillatore elementare forzato
i
rt
0F
H
Lo spostamento risulta quasi in fase con
la forzante aumentando il ritardo
all’aumentare dello smorzamento del
sistema.
Per il valore h = 0 (oscillatore non smor-
zato) forzante e spostamento risultano
perfettamente in fase ( = 0).
1) a 1 , pF x
0F
HF
px
t

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 13 / 29
Oscillatore elementare forzato
i
r
t
0F
H
La pulsazione della forzante esterna
eguaglia quella propria del sistema si dice
che questo ultimo si trova in condizione di
‘risonanza’.
2) a 1 , pF x
0F F
pxt
La forzante, anche se di modulo non
elevato, provoca nel sistema oscillazioni
rilevanti che aumentano al diminuire dello
smorzamento (teoricamente per h = 0 il
fattore di amplificazione tende all’infinito); è
una condizione di funzionamento dannosa
per il sistema e, quindi, da evitare.

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 14 / 29
i
r
Oscillatore elementare forzato
t
0F
H
L’angolo di fase vale sempre /2 per
qualsiasi valore dello smorzamento.
Quindi ad un massimo della forzante
corrisponde uno spostamento nullo, e
viceversa.
Lo spostamento viene definito in
‘quadratura’ con la forzante.
2) a 1 , pF x
0F F
pxt

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 15 / 29
Oscillatore elementare forzato
i
rt
0F
H
Gli spostamenti indotti sono sempre
minori di quelli provocati nel caso
statico e tendono a zero per pulsazione
della forzante tendente all’infinito;
l’angolo di fase, all’aumentare di a, si
approssima a tanto più quanto più è
piccolo lo smorzamento (lo spostame-
nto viene detto in ‘controfase’ rispetto
alla forzante)
3) a 1 , pF x
0F
H
F px
t

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 16 / 29
Oscillatore elementare forzato
i
rt
0F
HH
2H
(t) cos tpx H
(t) sen t
cos t
pv x H
H
2
2
(t) cos t
cos t
pa x H
H
nel piano (r,i) sono rappresentati sempre da vettori rotanti con velocità angolare
, il primo in anticipo di /2 rispetto allo spostamento, il secondo, invece, in
opposizione di fase.
Consideriamo l’integrale particolare e facciamone le derivate:

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 17 / 29
i
rt
0F
kH
rH
2mH
0F
eF
vFiF
t
Oscillatore elementare forzatoAnalizziamo l’equilibrio dinamico del sistema considerando i vettori rotanti nel
piano di Gauss.
(t)i v eF F F F
2
iF mH
vF rH
eF k H
I moduli dei vettori sono:
dove il primo vettore è diretto in verso opposto all’accelerazione, e, pertanto,
concorde con lo spostamento; il secondo è diretto in verso opposto alla velocità;
il terzo opposto allo spostamento.
HH
2H

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 18 / 29
i
rt
0F
kH
rH
2mH0F
eF
vFiF
t
Oscillatore elementare forzato
2 22 2
0k H m H r H F
Per l'equilibrio dei vettori rotanti si ha:
0
2 22
FH
k m r
Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 19 / 29
Oscillatore elementare forzato
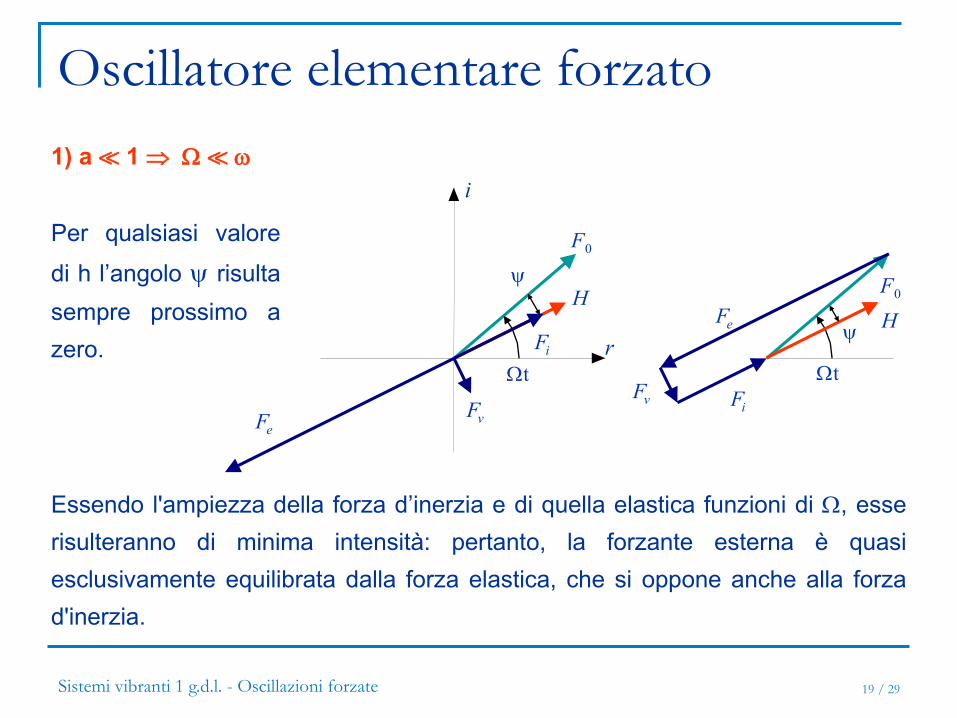
1) a 1
i
r
t
0F
0F
eF
vFiF
t
Essendo l'ampiezza della forza d’inerzia e di quella elastica funzioni di , esse
risulteranno di minima intensità: pertanto, la forzante esterna è quasi
esclusivamente equilibrata dalla forza elastica, che si oppone anche alla forza
d'inerzia.
Per qualsiasi valore
di h l’angolo risulta
sempre prossimo a
zero.
vFeF
iF
HH

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 20 / 29
Oscillatore elementare forzato
2) a 1
i
r
Essendo = /2, la
forzante esterna viene
totalmente equilibrata
dalla forza viscosa,
qualunque sia il valore
dello smorzamento del
sistema.
La forza elastica e quella d’inerzia si equilibrano tra di loro.
t
0F
0F
eF
vF
iFt
vF
iF
H H
eF

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 21 / 29
Oscillatore elementare forzato
3) a 1
i
rt
0F0F
eF
vF
iF
t
vF
iF
H
H
eF
l’angolo di fase risulta
sempre prossimo a ; il
valore di è grande e,
pertanto, la forza
d’inerzia, dipendendo da
2, assume intensità
elevate;
essa è quasi in opposizione di fase con la forzante e provvede ad equilibrarla,
insieme con la forza elastica che agisce pressoché in concordanza con la
forzante.

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 22 / 29
Esempio
L'insorgere di forzanti variabili periodicamente è facilmente riscontrabile nel caso
di presenza di macchine alternative (motori combustione interna, pompe o
compressori alternativi) o di rotori (motori o generatori elettrici, turbine, pompe o
compressori fluidodinamici).
Nel primo caso la forza eccitatrice può essere identificata con la forza d'inerzia
generata dalle masse dotate di moto alternativo: nel secondo caso è la non
perfetta bilanciatura dinamica del rotore a generare una forza d'inerzia rotante,
la cui componente verticale risulta una forza pulsante.
Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 23 / 29
M
, ,x x x
2k
r
2k
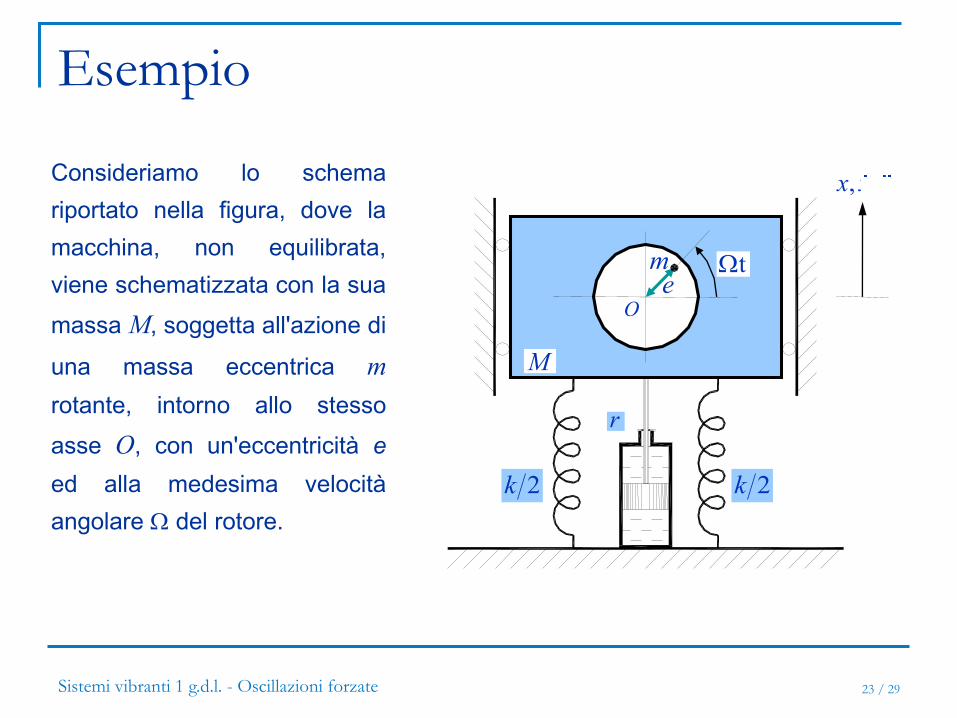
Esempio
Consideriamo lo schema
riportato nella figura, dove la
macchina, non equilibrata,
viene schematizzata con la sua
massa M, soggetta all'azione di
una massa eccentrica m
rotante, intorno allo stesso
asse O, con un'eccentricità e
ed alla medesima velocità
angolare del rotore.
m te
O

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 24 / 29
Esempio
2
kx r x
Lo spostamento verticale della
massa m vale:
sen tmx x e
dove x rappresenta il moto della
massa supportata elasticamente.
Se M rappresenta la massa totale
del sistema, comprensiva di m,
l'equazione del moto del sistema è:
2
2sen t
dk x r x M m x m x e
dt
2
kx
M m x 2 sen tm x e
2 sen tk x r x M m x m x e
M
m te
, ,x x x
O

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 25 / 29
Esempio
M
m te
, ,x x x
2
kx r x 2
kx
M m x 2 sen tm x e
2 sen tM x r x k x m e
risulta, cioè, un'equazione formalme-
nte analoga a quella del moto
ricavata per l’oscillatore elementare
forzato da una forzante armonica,
con ampiezza:
tale equazione ammette soluzioni dello stesso tipo di quelle già ricavate.
2
0F m e

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 26 / 29
2
2 22
m eH
k m r
2
rtg
k m
Esempio
in termini adimensionali:
2
2 221 2
mea
MH
a a h
2
2
1
a htg
a

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 27 / 29
Esempio
0
1
2
3
4
5
6
0 1 2 3 4
a
h = 0,1 h = 0,3 h = 0,6 h = 0,8
M H
me
il che permette di riportare il termine in funzione del rapporto a,M H
me
per vari valori di h.

Sistemi vibranti 1 g.d.l. - Oscillazioni forzate 28 / 29
Esempio
0
1
2
3
4
5
6
0 1 2 3 4
a
h = 0,1 h = 0,3 h = 0,6 h = 0,8
M H
me
per bassi regimi di rotazione della macchina, a 1, l'ampiezza della forza
eccitatrice me2 è molto piccola e tutte le curve partono dal valore zero.
Per a=1 si ha:1
2
M H
me h
è proprio la presenza dello
smorzatore a limitare il
picco della curva
Per a 1 1M H
me
la massa (M - m) ha un'ampiezza di oscillazione H = me/M sfasata, rispetto alla
posizione di m, di 180°.










