Vermelding onderdeel organisatie Delft Center for Systems and Control 1 Data-Based Modelling for...
104
Vermelding onderdeel organisatie 1 Delft Center for Systems and Control Data-Based Modelling for Control Paul M.J. Van den Hof 2006 IEEE Workshop Advanced Process Control Applications for Industry (APC2006), Vancouver, Canada, May 8-10 2006. www.dcsc.tudelft.nl/~pvandenhof/publications
-
Upload
deborah-brann -
Category
Documents
-
view
214 -
download
0
Transcript of Vermelding onderdeel organisatie Delft Center for Systems and Control 1 Data-Based Modelling for...

Vermelding onderdeel organisatie
1
Delft Center for Systems and Control
Data-Based Modelling for Control
Paul M.J. Van den Hof
2006 IEEE Workshop Advanced Process Control Applications for Industry (APC2006), Vancouver, Canada, May 8-10 2006.
www.dcsc.tudelft.nl/~pvandenhof/publications

2
Delft Center for Systems and Control
Contents
1. Introduction
2. Basic facts on system identification
4. Models for control
5. Model uncertainty and model validation
6. Basis functions model structures
7. Cheapest experiments
8. Discussion and prospects
3. Example from a MSW incineration plant

3
Delft Center for Systems and Control
Introduction
• Feasibility study 10%• Pre-tests 10%• Model identification 40%• Controller tuning 15%• Commissioning and training 25%
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
Costs distribution in an advanced process control project:
(Zhu, IFAC SYSID, 2006)
“obtaining process models is the single most time- consuming task in the application of model-based controllers”
(Ogunnaike, An Rev Control, 1996; Hjalmarsson, Automatica, 2005)

4
Delft Center for Systems and Control
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
Which kind of models to consider?
First principles / rigorous models
Data-based models
• large number of equations (PDE,ODE,DAE)• high computational complexity• question of validation• nonlinear
• compact model structures• computational feasible • validated by data• often linearized
Process design;
planning and scheduling;
off-line
Advanced control; on-
line operations;
on-lineFor advanced process control data-based models seem dominant

5
Delft Center for Systems and Control
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
On-line use of first principle models
• State dimension >>• f and h nonlinear
• For monitoring/diagnosis problems, state variables have clear physical interpretation, which has to be retained
• Full models in general too complex for on-line evaluations
• State-based model reduction techniques (POD,…) only help computationally in the case of linear f and h
• The (nonlinear) mappings have to be approximated/simplified
• Input-output model reduction destroys the state structure

6
Delft Center for Systems and Control
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
Data-based models (identification)
• Relatively easily obtained• Model costs are related to experiments on the plant
Model structures
Black box
Physics-basedProblem of accurate parametrization (where to put the unknowns?)Identifiability
Well sorted out in linear caseNot mature in nonlinear case
Emphasis, for the moment

7
Delft Center for Systems and Control
“Here is a dynamical process with which you are allowed to experiment (preferably cheap).
Design and implement a high-performance control system”.
Issues involved:• Experiment design• Modelling / identification• Characterization of disturbances and uncertainties• Choice of performance measure• Control design and implementation• Performance monitoring
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

8
Delft Center for Systems and Control
controller processprocess+
-
outputreferenceinput
disturbance
Classical experiments for finding control-relevant dynamics
• Relay feedback: amplitude and frequency at -180° phase
• Ziegler/Nichols tuning rules for PID-controllers
0
0.2
0.4
0.6
0.8
1
1.2
1.4
time
y(t)
tr
1%
ts
Mp
tp
90%
10%
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

9
Delft Center for Systems and Control
• Ad-hoc simple cases to be extended to general methodology for model-based control,including issues of robustness induced bymodel uncertainties
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

10
Delft Center for Systems and Control
Identification for Control (1990-…)
• Basic principles for identifying models, well sorted out
• Relation with control through Certainty equivalence principle: “Controller based on exact model is suited for implementation on the plant” However:
• Identification had been extended to identify approximate models
• Control design had been evolved to robust control
taking account of model uncertainties
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

11
Delft Center for Systems and Control
Data Model
Feedback control systemIdentification
processprocessoutputinput
disturbance
Feedback control systemFeedback control system
controllercontroller processprocess+
-
outputreferenceinput
disturbance
Model Controller
1 0-2
1 0-1
1 00
1 0-4
1 0-2
1 00
1 02
10-2
10-1
100
-600
-400
-200
0
amplitude
fase
frequency
Experiments:
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

12
Delft Center for Systems and Control
When is a model suitable for control?
For a given controller C:
C G0+
-
ru y
Achieved loop
C+
-
ru y
Designed loop• Both loops should be “close” (r y):
should be small
Ĝ
• Disturbance effects on y should be similar
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

13
Delft Center for Systems and Control
When is a model suitable for control?
Model quality becomes dependent on control bandwidth (to be designed)
plantmodel1: accurate for <b
model2: accurate for b
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
b

14
Delft Center for Systems and Control
ImplementatieImplementatieImplementation
RegelaarontwerpControl design
controller
IdentificatieIdentification
model
Experiment
data
ExperimentExperiment
Control bandwidthis based on model + ..
If models areuncertain/approximatedue to limited experiment,achievable performanceneeds to be discovered! modelling for control is learning(Schrama, 1992; Gevers, 1993)
evaluation
exp. design
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

15
Delft Center for Systems and Control
data
high-ordercontroller
high-ordermodel
low-ordermodel
low-ordercontroller
experiment
From experiment to control: validation and uncertainty
Current opinion: • Extract all information from data, but• Keep experiments simple
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

16
Delft Center for Systems and Control
Development trend:
Identification Control
• control-relevant nominal model
• nominal control
• nominal model +uncertainty bound
• nominal control +stab/perf robustness
• control-relevant model uncertainty set
• robust control; worst-caseperformance optimiz.
• design of “cheap” experiments for id ofuncertainty sets
• control under performance guarantees
1990 - : Schrama, Gevers, Bitmead, Anderson, Åström, Rivera, ….
1994 - : Hakvoort, de Vries, Ninness, Bitmead, Gevers, Bombois, …
1997 - : de Callafon & vdHof,Douma
2002 - : Bombois, Gevers,Hjalmarsson, vdHof,
Intro Sysid ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

17
Delft Center for Systems and Control
Contents
1. Introduction
2. Basic facts on system identification
4. Models for control
5. Model uncertainty and model validation
6. Basis functions model structures
7. Cheapest experiments
8. Discussion and prospects
3. Example from a MSW incineration plant

18
Delft Center for Systems and Control
Basic facts on system identificationIdentification of parametric models through prediction error identification
(open-loop)
G0(q)+++u y
v
H0(q)
e
G(q,)+-
H(q,)-1
(t)
presumed datagenerating system
predictor model
Data generating system:
Predictor model:
e is realization of stochasticwhite noise process
From measured data {u(t),y(t) }, t=1,..,N to estimated model
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

19
Delft Center for Systems and Control
Experimentdesign
Model SetData
ValidateModel
IdentificationCriterion
Construct model
prior knowledge /intended model application
NOT OK
OK
intendedmodel application
Prediction error framework:
{u(t),y(t) }, t=1,..,N
Convex or non-convex optimization
(Ljung, 1987)
fractions of polynomials
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

20
Delft Center for Systems and Control
Classical consistency results
1. If and u is sufficiently exciting then
2. If and u is sufficiently exciting then
provided that G and H are parametrized independently.
(frequency-dependent noise to signal ratio)
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
Asymptotic variancetypically dependent on

21
Delft Center for Systems and Control
1 0-2
1 0-1
1 00
1 0-4
1 0-2
1 00
1 02
10-2
10-1
100
-600
-400
-200
0
amplitude
fase
frequency
Since parameter estimates are asymptotically normally distributed (cental limit theorem), the variance expression can be converted to parameter confidence regions, e.g. 3-bounds (99.7%).
Using the mappings
the uncertainty bounds can be converted to• frequency response• step response • etc.
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

22
Delft Center for Systems and Control
Computational issues
1. In general situation: non-convex optimization (with risk of local minima)
2. Convex optimization if prediction error is affine in the parameters: property of model structure:
FIR:
ARX:
ORTFIR:
with A,B,F polynomials in q-1 :
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

23
Delft Center for Systems and Control
Characterization of asymptotic estimate
Limiting parameter estimate: i.e. minimizing the power in the weighted residual signal
Substituting the expressions from the signal block diagram delivers
1. If then
2. If and (fixed) then
Design variables in general case: model structure
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

24
Delft Center for Systems and Control
G0(q)+++u y
v
H0(q)
e
C(q)+
-
r
Closed-loop situation
Same approach can befollowed (direct method), on the basis of measurements u(t),y(t) Consistency result:
provided that and either: • r is sufficiently exciting, or
• C is sufficiently complex (high order / time-varying)
Accurate noise modelling is necessary for identifying G
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

25
Delft Center for Systems and Control
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
In direct closed-loop identification, possibilities for separately identifyingG0 and H0 are lost.
In a MIMO situation this happens already when a single loop is closed:

26
Delft Center for Systems and Control
Asymptotic variance in closed-loop identification
where now because of the closed-loop.
Writing a simple analysis leads to
(only the reference part of the input signal contributes to variance reduction)
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
reference part noise part

27
Delft Center for Systems and Control
G0(q)+++u y
v
H0(q)
e
C(q)+
-
r
Alternative indirect methods
When focussing on plant model only
1. Indirect Method
• Identify transfer r y
• Retrieve plant model, with knowledge of C
Several options, among which:
2. Two-stage method
• Identify transfer r u
• Simulate
• Identify G0 as transfer
Input signal u is denoised
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

28
Delft Center for Systems and Control
Properties indirect methods
General expression for the asymptotic estimate (with slight variations)
1. If then
2. If then
provided that r is sufficiently exciting and C is linear
Closed-loop properties of the plant are approximated.
Note that:
separate identification of G0 and H0 is possible.
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

29
Delft Center for Systems and Control
red
blue
Low frequencies are hidden; frequencies around bandwidth are emphasized
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
10-1
10010
-2
10-1
100
S
T|.|
ω

30
Delft Center for Systems and Control
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
Alternative closed-loop ID methods
• IV methods, using r as instrumental variable
• Coprime factor identification (related to gap, nu-gap metric)
• Dual-Youla identification
Nc Dc
R0
Dx-1 NxC
+++ -
-
+r u y

31
Delft Center for Systems and Control
Wrap-up PE identification
• Mature framework for system ID
• Extensions to multivariable situation available
• Stochastic noise framework
• Analysis is available but mainly for infinite data• Analysis much more explicit than e.g. for subspace ID /state-space models approximate models – design variables
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
• Open-loop and closed-loop data can be handled

32
Delft Center for Systems and Control
Contents
1. Introduction
2. Basic facts on system identification
4. Models for control
5. Model uncertainty and model validation
6. Basis functions model structures
7. Cheapest experiments
8. Discussion and prospects
3. Example from a MSW incineration plant

33
Delft Center for Systems and Control
Municipal Solid Waste Combustion
Boiler / steam system
FurnaceBunker
Bottom ash
Steam
Fly ash, gypsum,and others
Stack
Flue gascleaning /
post-combustion
control
Grate
Primary air flow
Secondary airflow
Ram
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
(Martijn Leskens)

34
Delft Center for Systems and Control
(Nolinear) Model Predictive Control of MSWC Plants
• Aim: NMPC of furnace and boiler partof MSWC plant:
NMPC requires good dynamic model of MSWC plant
MODEL VALIDATION
Crane SteamO2
Secondaryair
Primary air
BottomashGrate
Waste inlet
Ram
Flue gas& fly ash
NMPCCOMBUSTIONCONTROLLER
Setpoint O2
Setpoint steam
SYSTEMBORDER(MSWCplant)
MSWC plantNMPC
COMBUSTIONCONTROLLER
Setpoint Steam
Setpoint O2Primary air flow
Speed of Grate
Secondary air flow
Speed of Ram
Steam
O2
Manipulated Variables(MVs):
Controlled Variables(CVs):
Disturbance Variables(DVs):
(e.g. variation in wastecomposition)
100 150 200 250 300 350 400
11
12
13
14
15
stea
m [
t/h]
minutes
with NMPC without NMPCpred. EKF
200 400 600 800 1000
4
6
8
10
O2 [
Vol
. %
]
minutes
200 400 600 800 1000
10
11
12
13
14
15
H2O
[V
ol.
%]
minutes200 400 600 800 1000
7
8
9
10
11
12
CO
2 [V
ol.
%]
minutes
200 400 600 800 1000
2.5
3
3.5
x 104
flu
e ga
s [
Nm
3 /h]
minutes200 400 600 800 1000
1200
1400
1600
1800
2000
2200
T furn
ace [
degr
ees
Cel
sius
]
minutes
Simulation results
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

35
Delft Center for Systems and Control
• Closed-loop experimental configuration typically encountered in MSWC plants:
Closed-loop identification of MSWC plants
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

36
Delft Center for Systems and Control
“PARTIAL” closed-loop identification:
u1 = “open-loop” inputs
y1 = “open-loop” outputs
Etc.
• Experimental model is fit in the same i/o structure as the first principles model
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

37
Delft Center for Systems and Control
Goal
• Identification of linear models in 2 working points: Tprim = 70, 120 °C• Use these models to validate/calibrate a simple first-principles model
Identification setup• RBS excitation of all controlled inputs• Closed-loop identification with (indirect) two-stage method• Use of high-order ARX models and model-reduction• Enforcements of static gains to improve low-frequent behaviour• Sample time of 1 minute• Identified model validated through correlation tests• 8 scalar transfers identified with order between 2 – 5.
Simplified physical model (5th order NL) tuned to identified models.
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

38
Delft Center for Systems and Control
Considerable disturbances on output data:
dashed is measured data, solid is simulated data
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

39
Delft Center for Systems and Control
Estimated model (dashed) and NL-physical model (solid) upon excitation of the waste inlet
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

40
Delft Center for Systems and Control
Estimated model (dashed) and NL-physical model (solid) upon excitation of the primary air flow
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

41
Delft Center for Systems and Control
Results
• Identification and validation results for Tprim = 70 (I): good to very good agreement:
Responses on step from waste inlet flow
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

42
Delft Center for Systems and Control
Results
• Identification and validation results for Tprim = 120 (I): moderate to reasonable agreement:
Responses on step from waste inlet flow
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

43
Delft Center for Systems and Control
Results
• Closed-loop identification strategy is ‘easily’ applicable in an industrial setting and works well
• Fitting of first-principles model is still rather ad-hoc• Models are accurate enough for model-based MPC
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

44
Delft Center for Systems and Control
Contents
1. Introduction
2. Basic facts on system identification
4. Models for control
5. Model uncertainty and model validation
6. Basis functions model structures
7. Cheapest experiments
8. Discussion and prospects
3. Example from a MSW incineration plant

45
Delft Center for Systems and Control
How poor can models be?
plantmodel1: accurate for <b
model2: accurate for b
b
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

46
Delft Center for Systems and Control
Controlled with 5th order controller,with I-action, bandwidth 0.5 rad/s
Model quality becomes dependent on control bandwidth (to be designed)
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

47
Delft Center for Systems and Control
What looks like a good model in open-loop may be poor in closed-loop and vice versa
• Rule of thumb: models need to be accurate around control bandwidth
In general terms:
• Need for a structured way to measure control relevance of models,
and
• methods to identify them from data
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

48
Delft Center for Systems and Control
When is a model suitable for control?
For a given controller C:
C G0+
-
ru y
Achieved loop
C+
-
ru y
Designed loop
Ĝ
Performance measure for model quality could be:
The power of the difference signal:
In frequency domain:
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

49
Delft Center for Systems and Control
Can this performance measure be minized through identification?
Requested:
Indirect closed-loop ID delivers:
Conclusion:
A C-relevant model is identified by indirect closed-loop ID, by choosing
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

50
Delft Center for Systems and Control
Can this be achieved by open-loop identification?
OL-expression (OE-case):
Required integrand:
This requires:
which is unfeasible because of lack of knowledge of
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

51
Delft Center for Systems and Control
For a known controller C, the best control relevant model isnaturaly identified on the basis of a closed-loop experimentwhen C is implemented on the plant
However: the actual aim is to build models for a to-be-designed controller….
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

52
Delft Center for Systems and Control
Optimal models for control design
Consider control performance cost function:
• J is a general function, possibly including signal spectra, weightings etc.• Optimal controller:
E.g.
tracking
weighted sensitivity
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

53
Delft Center for Systems and Control
Optimal models for control design
Bounding the achieved control performance cost
Triangle inequality:
achieved performance
designed performance performance degradation
nominal control design
(when fixed)
Identification of nominal model
(when fixed)
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

54
Delft Center for Systems and Control
ImplementatieImplementatieImplementation
Regelaarontwerp Control design
controller
IdentificatieIdentification
model
Experiment
data
ExperimentExperiment
evaluation
exp. designSuccessive iteration of • nominal (closed-loop) identification• nominal control design
Appropriate convergence requirescautious/robust tuning,(taking account of model uncertainty)
Experiment design is notcritically incorporated yet(later)
Problem evolves to data/model-based controller tuning
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

55
Delft Center for Systems and Control
Including model uncertainty for controller robustness
10-2
10-1
100
10-4
10-2
100
102
10-2 10-1 100-600
-400
-200
0
amplitude
phase
frequency
1) In situation convert probabilistic parameter uncertainty bound to the frequency domain (Bode, Nyquist)
Determine
and use this as f-dependent (hard) upper bound on additive error
to be used in “classical” robust stability and performance checksIntro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

56
Delft Center for Systems and Control
Including model uncertainty for controller robustness
1) Some work has been done to extend this to the situation
by including a deterministic bounding term on the bias
(Goodwin, Gevers & Ninness, 1992; de Vries & Van den Hof, 1995; Hakvoort & Van den Hof, 1997)
relying on FIR/ORTFIR model structures
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

57
Delft Center for Systems and Control
Including model uncertainty for controller robustness
2) Retain the parametric structure in the model uncertainty by considering
U is parameter ellipsoid determined by cov.matrix
• A particular robust stability test is available for this structure
• Worst-case frequency response of any closed-loop transfer of (C,G) can be exactly calculated by solving an LMI problem.
(Bombois, Gevers, Scorletti, Anderson, 2001)
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

58
Delft Center for Systems and Control
Including model uncertainty for controller robustness
3) In stead of looking at explicit bounds for the model error
there are options for formulating the bounds directly on the levelof the performance function:
e.g. by considering bounds on the closed-loop system rather thanon the plant.
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
For virtually all closed-loop measures J, performance degradationis affine in dual-Youla parameter R

59
Delft Center for Systems and Control
Controller tuning (Double Youla parametrization)
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
A plant uncertainty structure based on the double Youla parametrization delivers a larger set of controllers guaranteed to be robustly stabilizing than an uncertainty based on gap metrics.
++ y+-
1xD xN
++G
cN cD
++1cD cN
++C
xN xD
2r
1r
Stability guaranteed if
Control-dependent plant uncertainty and plant-dependent controller deviation

Delft Center for Systems and Control
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

61
Delft Center for Systems and Control
Contents
1. Introduction
2. Basic facts on system identification
4. Models for control
5. Model uncertainty and model validation
6. Basis functions model structures
7. Cheapest experiments
8. Discussion and prospects
3. Example from a MSW incineration plant

62
Delft Center for Systems and Control
Uncertainty regions with probability
10-2
10-1
100
10-4
10-2
100
102
10-2
10-1
100-600
-400
-200
0
amplitude
phase
frequency
Frequeny response
parameter region
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

63
Delft Center for Systems and Control
Classical reasoning for quantifying uncertainty
• Let identified models pass a validation test
• Assume that the real system belongs to the model set
• Use analytical (variance) expressions for quantifying parameter variance and resulting model variance
G0(q)+++u y
v
H0(q)
e
G(q,)+-
H(q,)-1
(t)
presumed datagenerating system
predictor model
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

64
Delft Center for Systems and Control
Residual tests
0 5 10 15 20 25-0.2
0
0.2
0.4
0.6
0.8
1
1.2Correlation function of residuals. Output y1
lag
-25 -20 -15 -10 -5 0 5 10 15 20 25-0.2
-0.1
0
0.1
0.2Cross corr. function between input u1 and residuals from output y1
lag
When model passes the test, there is no evidence in the data that the model is wrong
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

65
Delft Center for Systems and Control
Question:
Classical reasoning for quantifying uncertainty
• Let identified models pass a validation test
• Assume that the real system belongs to the model set
• Use analytical (variance) expressions for quantifying parameter variance and resulting model variance
When a model passes the validation test is it justified to assume that?
If YES: validation test is crucialIf NO: how to justify the assumption?
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

66
Delft Center for Systems and Control
Intriguing example – 4th order process; 2nd order model; white input
log
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

67
Delft Center for Systems and Control
Intriguing example – 4th order process; 2nd order model
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

68
Delft Center for Systems and Control
Intriguing example – 4th order process; 2nd order model
10-2
10-1
100
101
10-3
10-2
10-1
100
Frequency (rad/s)
Am
plit
ud
e
From u1 to e@y1
No undermodelling is detectedIntro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

69
Delft Center for Systems and Control
Problems:
• Bounds for testing are dependent on
• is estimated by
• Due to unmodelled dynamics the noise variance is over-estimated• Bounds in the correlation test are too large
In Output Error case:
Additionally:
• Pointwise test on does not detect any structure in the signal
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

70
Delft Center for Systems and Control
Remedies1. Improve noise model for validating
2. Replace pointwise test on by vector valued
test on
Accurate noise model, e.g. through high-order auxiliary plant model andtime-series modeling on the basis of the output residual
(suggested before by Söderström, 1989; Hjalmarsson, 1993)
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

71
Delft Center for Systems and Control
Example (continued)
• Same 4th order system as before; white output noise
• N = 256
• Input signal is white noise
• Auxiliary high-order OE plant model of order N/5
• Time-series model on output residual for noise modelling
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

72
Delft Center for Systems and Control
Example (continued)
effect of model error
effect of noise
classical bound
improved bound
Improved noise model leads to falsification of 2nd order modelIntro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

73
Delft Center for Systems and Control
Vector-valued test over 128 lags
Exact noise modelImproved estimateFrom residual
All models are validated
Example (continued)
Noise cov estimfrom:
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

74
Delft Center for Systems and Control
However
Even if we can improve the validation test, it remains dependent on input-data(no conclusions possible about frequency areas that are not excited)
Best case scenario (validation implies no-bias) is questionable
Argument for incorporating bias-term in quantifying model ucertainty
There are limitations in validating plant models without having accurate noise models
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

75
Delft Center for Systems and Control
Contents
1. Introduction
2. Basic facts on system identification
4. Models for control
5. Model uncertainty and model validation
6. Basis functions model structures
7. Cheapest experiments
8. Discussion and prospects
3. Example from a MSW incineration plant

76
Delft Center for Systems and Control
Basis functions model structuresIn identification the use of FIR models is very attractive:
FIR:
2. Output Error structure: plant/noise model parametrized independently
Simple computations and analysis of model uncertainty
1. Linear regression LS criterion is convex
3. Covariance matrix P is explicitly available and not dependent on G0
holding true even for finite N
4. Parameter maps linearly to f-response
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

77
Delft Center for Systems and Control
Disadvantage:
High number of parametersis required to cover fastand slow dynamics
Alternative:
Use pre-chosen generalized functions, tailored to the dynamics
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

78
Delft Center for Systems and Control
Laguerre-case:
Expansion becomes particularly fast
for systems with dominating pole around z=a
Generalized situation through Gramm-Schmidt orthogonalization on
(Takenaka-Malmquist)
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

79
Delft Center for Systems and Control
(Takenaka-Malmquist)
Practical use:
• choose any finite sequence of stable pole locations i for i=1,..,nb
(preferably in neighborhood of dominating system poles)
• use model expansion:
where usually the pole locations are repeated to extend the expansion
• for n 1 all stable LTI systems can be represented
• basis functions are orthogonal in l2 sense
Central role is played by the stable all-pass function:
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

80
Delft Center for Systems and Control
Generalization of tapped-delay line Generation of the OBFs
• By a set of stable poles
• By a stable all-pass (inner) function:
Choice of poles determines rate of convergence of the series expansion
Gb
c1
+
Gb
c2
Gb
cn
+
u(t)
y(t)
xb(2)(t)xb
(1)(t) xb(n)(t) Balanced state readout
Heuberger, Van den Hof & Wahlberg (2005)
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

81
Delft Center for Systems and Control
Gb
c1
+
Gb
c2
Gb
cn
+
u(t)
y(t)
xb(2)(t)xb
(1)(t) xb(n)(t) Balanced state readout
For a given system G0 with poles in p1, pn the convergence rate of the series expansion
is determined by its slowest eigenvalue:
If basis poles and system poles approach each other, the convergence rate becomes very fast
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

82
Delft Center for Systems and Control
Example basis pole selection
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

83
Delft Center for Systems and Control
ORTFIR:
ORTFIR Model Structure
Least squares solution:
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

84
Delft Center for Systems and Control
ORTFIR extension to multivariable case
1. Scalar functions, matrix coefficients
(compare MIMO FIR)
2. Matrix functions, e.g.
basis poles are reflected in input balanced pair A,B
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

85
Delft Center for Systems and Control
Basis functions wrap-up
• Attractive model structure for computations and analysis
• Prior knowledge of system poles can be incorporated
• The more accurate the prior info, the more efficient is the structure (small number of coefficients bias/variance trade-off)
• No loss of generality (all systems can be representeed)
• Full analysis equipment of PE identificaiton is available
• Simple extension to MIMO case
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
Looking for solutions in the neighborhood where you expect them!

86
Delft Center for Systems and Control
Contents
1. Introduction
2. Basic facts on system identification
4. Models for control
5. Model uncertainty and model validation
6. Basis functions model structures
7. Cheapest experiments
8. Discussion and prospects
3. Example from a MSW incineration plant

87
Delft Center for Systems and Control
Cheapest Identification Experiment for Control
G0(q)+++u y
v
H0(q)
e
C(q)+
-
r
• Excitation of r is desirable to improve accuracy of identified model• Excitation of r disturbs process operation and efficiency
• Find the “smallest” r such that an identified model is sufficiently accurate to robustly enhance the controller C
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

88
Delft Center for Systems and Control
G0(q)+++u y
v
H0(q)
e
C(q)+
-
r
• Excitation experiment is determined by N and
• For fixed N, the costs of identification are determined by
Problem Set-up
with the power of signal
and the power of signal
• and are scalar design variablesIntro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

89
Delft Center for Systems and Control
Accuracy of identified model is characterized by its covariance matrix
It appears that is affine in N and in :
Note: is dependent on plant, and on asymptotic theory
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

90
Delft Center for Systems and Control
Experiment design problem:
Under the constraint
For fixed N , solve
Formulated as a result ofcontrol performance specs
Problem can be solved by an LMI, provided that
• excitation spectrum is parametrized linearly• system knowledge in is replaced by initial model estimate
Signal power and data length are related to each other
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

91
Delft Center for Systems and Control
Reduction of required data length in process applicationMinimum identification cost as a function of N
For N = 4901, minimum cost is 0: no external excitation is necessary!
rbs
FIR filteredrbs
(Bombois et al. 2004)
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

92
Delft Center for Systems and Control
designed bandwidth
Reduction of required data length in process application
Compared withwhite noisePRBS signal ofsame power
Gain in experiment time reduction from PRBS to dedicated periodic signal
(Jansson, 2005)
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion

93
Delft Center for Systems and Control
Plant Designed closed-loopOptimal input
Example resultsInclusing constraints

94
Delft Center for Systems and Control
Input constraint

95
Delft Center for Systems and Control
Experiment design
• New framework for control-relevant experiment design• Economic objective is attractive for industrial processes• Results –on simulations based- look promising • Finite-time perspectives to be taken into account• Excite the important dynamics and ‘not more’• Towards dedicated experiments:
Intro System ID MSW-example Models for control Uncertainty&validation Basis functions Experiment design Discussion
Generalization of the idea:‘’If you need the static gain, apply a step signal’’

96
Delft Center for Systems and Control
Contents
1. Introduction
2. Basic facts on system identification
4. Models for control
5. Model uncertainty and model validation
6. Basis functions model structures
7. Cheapest experiments
8. Discussion and prospects
3. Example from a MSW incineration plant

97
Delft Center for Systems and Control
Discussion and Prospects
• Wandering through the field• Data-based modelling in open-loop and closed-loop• Tools become mature, but• Paradigm dominantly linear!• Have we solved the problem?• Picture of high-level automated plants controlled by `autonomous’ controllers

98
Delft Center for Systems and Control
Towards fully automated plant control
• Continuous performance monitoring• Performance benchmarking for detecting changes• Event-driven model update through dedicated experiments (economic criterion: will a new model pay…)• Including model uncertainty bounding and disturbance analysis• Controller update for improved performance
Monitoring
Control design
Identification
Experiment
Continuously active loop

99
Delft Center for Systems and Control
A challenging problem field
Reservoir Engineering withSmart Wells / Fields

100
Delft Center for Systems and Control
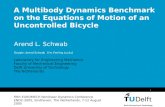
E&P activity domains
productionoperations
days years decadestime
space
OU
asset
field
well
reservoirmanagement
field dev. planning
portfoliomanagement
business planning
historic data& forecasts
objectives& constraints
objectives& constraints
historic data& forecasts

101
Delft Center for Systems and Control

102
Delft Center for Systems and Control

103
Delft Center for Systems and Control
Thanks to:
Xavier Bombois Sippe Douma
Roland TóthMartijn Leskens Gijs van Essen
Robert Bos
Peter Heuberger, Maarten Zandvliet,

104
Delft Center for Systems and Control
Selection of References
• P. Albertos and A. Sala (Eds.). Iterative Identification and Control. Springer Verlag, London, UK, 2002.
• X. Bombois, M. Gevers, G. Scorletti and B.D.O. Anderson (2001). Robustness analysis tools for an uncertainty set obtained by prediction error identification. Automatica, 37, pp. 1629-1636.
• X. Bombois, G. Scorletti and P. Van den Hof (2005). Least disturbing closed-loop identification experiment for control. Proc. 16th IFAC World Congress, Prague, 2005, paper Tu-E02-TO/6.
• R.A. de Callafon and P.M.J. Van den Hof (1997). Suboptimal feedback control by a scheme of iterative identification and control design. Mathem. Modelling of Systems, 3, pp. 77-101.
• S. Douma, X. Bombois and P.M.J. Van den Hof (2005). Validity of the standard cross-correlation test for model structure validation. Proc. 16th IFAC World Congress, Prague, 2005, paper We-M13-TO/6.
• M. Gevers (1993). Towards a joint design of identification and control. In: Essays on Control: Perspectives in the Theory and its Applications, pp. 111--115. Birkhäuser, Boston, 1993.
• M. Gevers (2005). Identification for control: from the early achievements to the revival of experiment design. European J. Control, 11, 335-352.
• P.S.C. Heuberger, P.M.J. Van den Hof and B. Wahlberg (Eds.). Modelling and Identification with Rational Orthogonal Basis Functions. Springer Verlag, 2005.
• H. Hjalmarsson, M. Gevers and F. De Bruyne (1996). For model-based control design, closed-loop identification gives better performance. Automatica, 32, 1659-1673.
• H. Hjalmarsson (2005). From experiment design to closed-loop control. Automatica, 41, 393-438.
• M. Leskens, L.B.M. van Kessel and P.M.J. Van den Hof (2002). MIMO closed-loop identification of an MSW incinerator. Control Engineering Practice, 10, 315-326.
• P.M.J. Van den Hof and R.J.P. Schrama (1995). Identification and control -- closed-loop issues, Automatica, 31, 1751-1770.