
Velocity_Estimation_w_Nonlinear_Observer
18
1 Edit Presentation Title on Slide Maste Edit Date on Slide Maste Longitudinal and Lateral Longitudinal and Lateral Vehicle Velocity Estimation Vehicle Velocity Estimation with a with a Nonlinear Observer Nonlinear Observer An Example of Using TruckSim in Developing Vehicle Control Algorithms Ragnar Ledesma CVS Advanced Engineering
-
Upload
ragnar-ledesma-pe-phd -
Category
Documents
-
view
77 -
download
0
Transcript of Velocity_Estimation_w_Nonlinear_Observer

1
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Longitudinal and Lateral Vehicle Longitudinal and Lateral Vehicle Velocity Estimation with aVelocity Estimation with a
Nonlinear ObserverNonlinear Observer
An Example of Using TruckSim in Developing Vehicle Control Algorithms
Ragnar LedesmaCVS Advanced Engineering

2
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Background
• Current dynamic vehicle control systems include the following sensors:• Wheel rotation rates, steering angle, lateral and longitudinal
accelerometers, yaw rate
• Advanced control systems require time-varying parameters or states that can not be measured directly:• Vehicle velocity, vehicle slip angle, spindle loads, friction
coefficient, roll angles, etc.
• Need estimators (state observers) to provide reliable real-time estimates, subject to: • Model uncertainty, external disturbances, uncertainty in
measurements, changes in operating conditions

3
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Overview: Vehicle Velocity / Side Slip Estimation
Variables to estimate:• Longitudinal velocity vx
• Lateral velocity vy
• (Vehicle side slip angle
Secondary variables:• Maximum friction coefficient H
• Road bank angle
Sensors• Lateral/longitudinal acceleration ay/ax
• yaw rate r• wheel speed i and steering angle i

4
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Vehicle Model for Nonlinear Observer• Simplified vehicle model:
• Measurement variables:• Steering angles
• Wheel speeds
• Yaw rate
• Accelerations
5
Edit Presentation Title on Slide MasterEdit Date on Slide Master
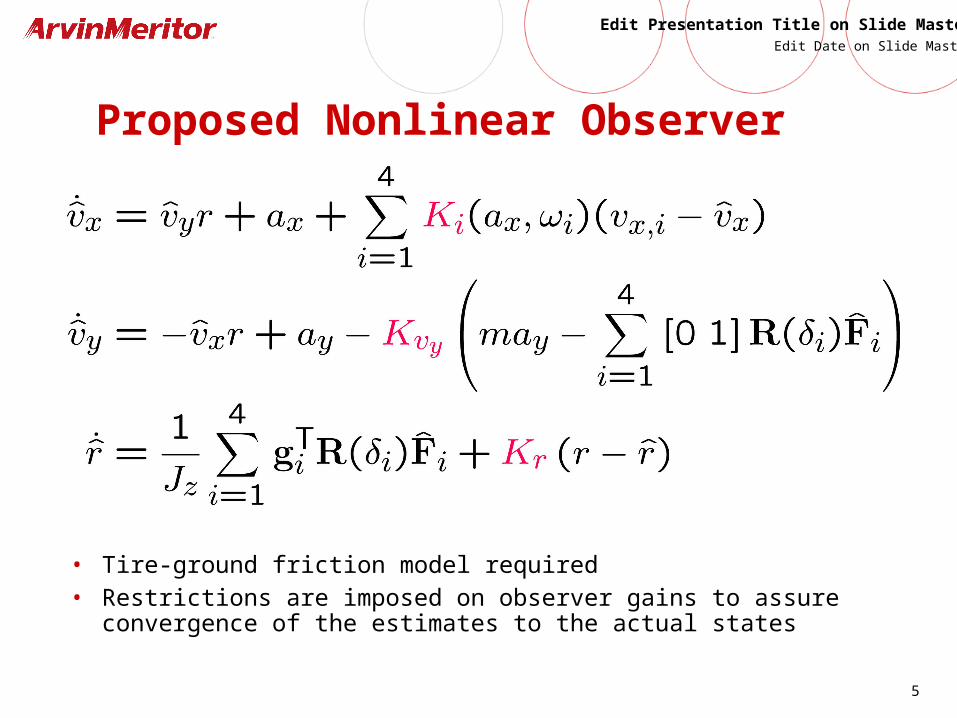
Proposed Nonlinear Observer
• Tire-ground friction model required• Restrictions are imposed on observer gains to assure
convergence of the estimates to the actual states

6
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Example 1: Sinusoidal Steering

7
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Example 1: Sinusoidal Steering
vehicle side slip angle
lateral speed
longitudinal speed
8
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Example 2: Constant Radius Test on Low Friction Surface

9
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Example 2: Constant Radius Test on Low Friction Surface
vehicle side slip angle
lateral speed
longitudinal speed

10
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Example 3: Braking in a Turn

11
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Example 3: Braking in a Turn
vehicle side slip angle
lateral speed
longitudinal speed

12
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Example 4: Split- Braking (with ABS)

13
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Example 4: Split- Braking (with ABS)
longitudinal speed
lateral speed
vehicle side slip angle
wheel speeds

14
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Example 5: Double Lane Change at 80 Km/Hr
15
Edit Presentation Title on Slide MasterEdit Date on Slide Master
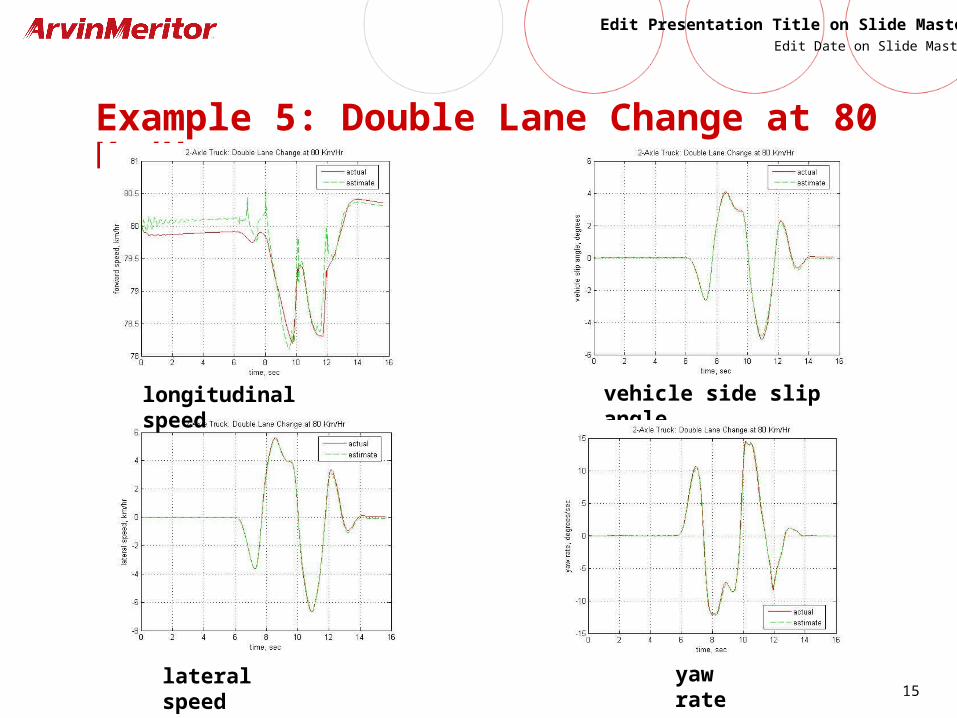
Example 5: Double Lane Change at 80 Km/Hr
longitudinal speed
lateral speed
vehicle side slip angle
yaw rate

16
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Example 6: Double Lane Change on a Split- Surface

17
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Example 6: Double Lane Change on a Split- Surface
longitudinal speed
lateral speed
vehicle side slip angle
yaw rate

18
Edit Presentation Title on Slide MasterEdit Date on Slide Master
Next Step: Adaptive Nonlinear Observer
• Nonlinear observer relies on tire-ground friction model
• Friction model is characterized by “maximum friction coefficient”,
• Difficult to measure ground friction
• Need on-line adaptation model for


















