Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision

of 226
-
Upload
sarah-elabiad -
Category
Documents
-
view
240 -
download
1
Transcript of Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
1/226
Vehicules Intelligents : Etude et developpement dun
capteur intelligent de vision pour lattelage virtuel
Mohamed Zayed
To cite this version:
Mohamed Zayed. Vehicules Intelligents : Etude et developpement dun capteur intelligent devision pour lattelage virtuel. domain other. Universite des Sciences et Technologie de Lille -Lille I, 2005. French.
HAL Id: tel-00141213
https://tel.archives-ouvertes.fr/tel-00141213
Submitted on 12 Apr 2007
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of sci-
entific research documents, whether they are pub-
lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
Larchive ouverte pluridisciplinaire HAL, est
destinee au depot et a la diffusion de documents
scientifiques de niveau recherche, publies ou non,
emanant des etablissements denseignement et de
recherche francais ou etrangers, des laboratoires
publics ou prives.
https://tel.archives-ouvertes.fr/tel-00141213https://tel.archives-ouvertes.fr/tel-00141213https://hal.archives-ouvertes.fr/ -
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
2/226
THESE
Prsente lUniversit des Sciences et Technologies de Lille
En vue de lobtention du grade de
DOCTEUR DE LUNIVERSITE
Spcialit
Instrumentation et Analyses Avances
Par
Mohamed ZAYED
Vhicules Intelligents : Etude et dveloppement dun capteur
intelligent de vision pour lattelage virtuel
Soutenue publiquement le12 juillet 2005 devant la commission d'examen :
Membres du jury :
Prsident : M. F. CABESTAING Matre de ConfrencesHDR, LAGIS, USTL.
Rapporteurs : M. P. MARCHE Professeur, Ecole Nationale Suprieure
dIngnieurs de Bourges.
M. J M. THIRIET Matre de Confrences HDR, CRAN Universit
Henri Poincar Nancy I.Examinateurs : Mme M. BAYART Professeur, LAGIS, USTL (Directrice de Thse)
M. J. BOONAERT Matre de Confrences, GIP, Ecole des Mines de
Douai (Co-directeur de Thse)
Cette thse a t prpare dans le cadre dune collaboration entre le Laboratoire dAutomatique etde Gnie Informatique et Signalde Lille et le Dpartement deGnie Informatique et productique de lEcole des Mines
de Douai.
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
3/226
Remerciements
Ce travail a t effectu dans le cadre dune collaboration entre le Laboratoire
dAutomatique, Gnie Informatique & Signal LAGIS et le Dpartement Gnie
Informatique et Productique GIP de lEcole des Mines de Douai.
Je tiens remercier, Monsieur Philippe Hasbroucq, Directeur de dpartement GIP de
m'avoir accueilli dans son dpartement.
Je suis heureux dexprimer toute ma gratitude envers Madame Mireille Bayart,
Professeur PolytechLille et responsable de lquipe Sret de Fonctionnement des
Systmes Dynamiques qui ma fait confiance en me proposant ce sujet de thse, ainsi que
pour sa riche exprience scientifique dont elle ma fait profiter.
Jexprime ma vive reconnaissance Monsieur Jacques Boonaert, Matre de Confrences
lEcole des Mines de Douai, qui a co-dirig ce travail et qui la enrichi en instillant le got
de lapplication des cas rels. Quil trouve ici lexpression de ma gratitude pour la
confiance, les conseils et les suggestions aviss quil ma prodigus ainsi que pour ses
qualits scientifiques et humaines exceptionnelles dont il a fait preuve en co-dirigeant ce
travail.
Je remercie Monsieur Franois Cabestaing, Matre de Confrences HDR lUniversit
des Sciences et Technologies de Lille, pour lhonneur quil ma fait en acceptant de
prsider ce jury de soutenance de thse.
Je souhaite galement remercier, Messieurs Pierre March, Professeur lEcole
Nationale Suprieure dIngnieurs ENSI de Bourges et Jean-Marc Thiriet, Matre de
Confrences HDR au CRAN Universit Henry Poincar Nancy I, pour lhonneur quils mont
fait de juger ce travail en qualit de rapporteurs.
Je voudrais galement remercier, Monsieur Philippe Desodt, Professeur lEcole des
Mines de Douai et Responsable de lquipe SPI, pour mavoir accueilli aux sein de son
quipe toute la dure de ma thse.
Enfin, sans donner une liste exhaustive ou sans m'embarquer dans un rcit que seulsles destinataires comprendraient, de peur d'en oublier, je tiens remercier particulirement,
tous le personnel de lquipe SPI du dpartement GIP, pour la bonne ambiance qui ont su
apporter tout au long de ma prsence au sein de lquipe et pour les qualits personnelles de
chacun et chacune.
Dans ces moments de remerciements, jai une pense particulire pour Monsieur
Daniel Manier, qui nous a quitter tout jamais en laissant aprs lui un norme vide!
Pour terminer, mes remerciements sadressent ma famille, mes parents qui mont
aid sur tous les plans et dont les mots ne sauront exprimer ma reconnaissance, et ma sur
et mon frre.
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
4/226
Sommaire
INTRODUCTION GENERALE ....................................................... ........................................................... ....... 5
1. CONTEXTE DE LA THSE ........................................................ ........................................................... 52. CADRE DE LA THSE.............................................. ............................................................. ................ 6
3. OBJECTIF DE LA THSE........................................................ ............................................................ 11
4. PLAN DU MMOIRE ......................................................... ............................................................ ...... 13
LES VEHICULES INTELLIGENTS : ETAT DE LART.................................................. ............................ 14
I.1. INTRODUCTION..................................................... ....................................................... ...................... 14
I.2. LA CONDUITE AUTOMATISE DES VHICULES.............................................. ........................... 17
I.2.1. QUE FAUT-IL AMLIORER, LES VHICULES OU LES INFRASTRUCTURES ?............. 17
I.2.2. QUELLES SONT LES EXIGENCES QUE DOIT SATISFAIRE UNE APPLICATION ITS ? 18
I.2.3 QUEL TYPE DE CAPTEURS UTILISER ? .................................................... ........................... 19
I.3. LA VISION DANS LE DOMAINE DES VHICULES INTELLIGENTS........................................... 20
I.4. LE SUIVI DE LA ROUTE.............. ........................................................... ............................................ 22
I.4.1. DTECTION DES MARQUAGES AU SOL .................................................................... ......... 22
I.4.2. DTECTION DES OBSTACLES............................ ................................................................... 25
I.5. LES TENDANCES RELATIVES A LVOLUTION DES MATRIELS........................................... 29
I.6. LES VHICULES PROTOTYPES................................................ ........................................................ 30
I.7. CONCLUSION......................................................................................... .............................................. 31
LES CAPTEURS INTELLIGENTS............................................................ ...................................................... 33
II.1. INTRODUCTION........................................................... ........................................................ ............... 33
II.2. POURQUOI METTRE LINTELLIGENCE AU SEIN DES CAPTEURS ?......................................... 34
II.2.1. LITINRAIRE DE LINFORMATION............................................ ......................................... 34
II.2.2. CE QUON ATTEND DUN CAPTEUR INTELLIGENT.................................. ....................... 36
II.3.3. FONCTIONS ASSOCIES LINTELLIGENCE DES CAPTEURS................................ 37
II.3.4. FONCTIONS DE LINTELLIGENCE DANS LE TRAITEMENT DE LINFORMATION..... 39
II.3. LES APPROCHES DE RALISATION DES CAPTEURS INTELLIGENTS..................................... 39
II.4. MODLISATION DU CONCEPT DU CAPTEUR INTELLIGENT :.................................................. 40
II.5. LE CAPTEUR INTELLIGENT EN TANT QUQUIPEMENT INTELLIGENT ............................... 41II.6. DOMAINES DAPPLICATIONS DES CAPTEURS INTELLIGENTS.............................. ................. 42
II.7. LA CONCEPTION DES CAPTEURS INTELLIGENTS..................................................................... . 43
II.7.1. APPROCHE FONCTIONNELLE ........................................................... .................................... 43
II.7.1.1. LA DCOMPOSITION FONCTIONNELLE.......................................................... ................ 43
II.7.1.2. LA DCOMPOSITION PAR FLOTS DE DONNES............................................................ 44
II.7.2. APPROCHE INFORMATIONNELLE .................................................. ..................................... 44
II.7.3. APPROCHE COMPORTEMENTALE ............................................................. .......................... 45
II.7.4. APPROCHE HYBRIDE....................................................... ....................................................... 46
II.7.5. APPROCHE ORIENTE OBJET ............................................................... ................................ 46
2
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
5/226
II.8. LE CAPTEUR INTELLIGENT DDI LATTELAGE VIRTUEL ................................................. 47
II.8.1. BESOINS SUPPLEMENTAIRES......................... ................................................................ ...... 48
II.8.2. SPCIFICATIONS DES BESOINS DU SYSTME DATTELAGE VIRTUEL...................... 48
II.8.2.1. LES CONSOMMATEURS EXTERNES................................................................................. 49
II.8.2.2. LES SERVICES QUE DOIT FOURNIR LE SYSTME........................................................ 50II.8.3. ARCHITECTURE OPRATINNELLE DU SYSTME DATTELAGE VIRTUEL ................ 63
II.9. CONCLUSION.......................................................................................... ............................................. 65
APPLICATION : ATTELAGE VIRTUEL .......................................................... ............................................ 66
III.1. INTRODUCTION........................................................... ....................................................... ................ 66
III.2. LES CONTRAINTES ET LES EXIGENCES DE LAPPLICATION................................................... 68
III.2.1. AU NIVEAU DE LAPPLICATION ..................................................... ..................................... 68
III.2.2. AU NIVEAU MATRIEL .................................................. ........................................................ 70
III.3. DCOMPOSITION FONCTIONNELLE DU CAPTEUR STROSCOPIQUE DVELOPP......... 70
III.3.1. ACQUISITION...................................................... ....................................................... ............... 72
III.3.1.1. LES DISPOSITIFS DACQUISITION DIMAGES .................................................. ............. 73
III.3.1.2. LA TAILLE DU CAPTEUR................... ................................................................ ................. 77
III.3.1.3 LE MODLE GOMTRIQUE DE LA CAMRA ............................................................... 77
III.3.1.4. CHAMPS DE VISION VOLUME DE TRAVAIL ............................................................... 86
III.3.2. LE SYSTME DE STROVISION................ ..................................................................... ..... 89
III.3.2.1. UNE CONFIGURATION GOMETRIQUE PARTICULIERE ............................................. 89
III.3.2.2. DSCRIPTION DU SYSTME DE STROVISION MIS EN PLACE............................... 90
III.3.3. LA CALIBRATION..................................................... ......................................................... ...... 93
III.3.3.1. LA CALIBRATION PHOTOGRAMTRIQUE...................................................................... 95
III.3.3.2 LA CALIBRATION HYBRIDE................................................................ .............................. 97
III.3.3.3. LAUTOCALIBRATION (SELF-CALIBRATION) ....................................................... ...... 101
III.3.3.4 LA CALIBRATION DUN CAPTEUR STROSCOPIQUE ............................................. 108
III.3.4. MISE EN UVRE DE LA CALIBRATION HYBRIDE ......................................................... 110
III.3.4.1. BINARISATION DE LIMAGE...................................................... ...................................... 112
III.3.4.2. DTECTION DES RECTANGLES ET EXTRACTION DES COINS DE LA MIRE ......... 113
III.3.4.3. ORGANISATION DES COINS DTECTS........................................................................ 114
III.4.4.4. EVALUATION DES PERFORMANCES DE LA CALIBRATION DU SYSTMESTROSCOPIQUE....... ................................................................ ................................... 116
III.3.5. DTECTION DE LA PLAQUE DIMMATRICULATION........................... .......................... 128
III.3.5.1. LA SEGMENTATION STATISTIQUE ................................................. ............................... 129
III.3.4.2. RSULTATS EXPERIMENTAUX....................................... ................................................ 138
III.3.6. LECTURE DE PLAQUE DIMMATRICULATION................................................................ 140
III.3.6.1. SEGMENTATION DES CARACTRES ............................................................. ................ 141
III.3.6.2. RECONNAISSANCE DES CARACTRES..................................................................... .... 146
III.3.6.3. EVALUATION DES PERFORMANCES DE LA PROCDURE DE LECTURE DE LA
PLAQUE................................................................................................................................. 155
3
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
6/226
III.3.7. LALGORITHME DE TRACKING.............................................................. ............................ 156
III.3.7.1. INTERET DE LA DEMARCHE ........................................................... ................................ 156
III.3.7.2. LA DMARCHE GLOBALE...................... ........................................................... ............... 156
III.3.7.3. MISE EN UVRE DU FILTRE........................................................................................... . 159
III.3.8. EXTRACTION DES INFORMATIONS NCESSAIRES AU SUIVI DU VHICULE ......... 160III.3.8.1. LE MODE NORMAL DU FONCTIONNEMENT DU CAPTEUR STROSCOPIQUE... 161
III.3.5.2. LE MODE DU FONCTIONNEMENT DGRAD DU CAPTEUR STROSCOPIQUE. 174
III.4.CONCLUSION ........................................................ ........................................................... .............. 186
CONCLUSION GNRALE .............................................. ....................................................... ..................... 188
RFRENCES BIBLIOGRAPHIQUES ................................................ ....................................................... . 192
ANNEXE A.................................................. ........................................................... ........................................... 205
A. Lobjectif des camras........ ........................................................... ....................................................... 205
A.1. Paramtres caractristiques dun objectif........................... ........................................................ 205
A.1.1. LA FOCALE : .......................................................... ......................................................... ..... 205
A.1.2. LE DIAPHRAGMME : ................................................................ .......................................... 205
A.1.3. LE FOCUS : .................................................. ........................................................... .............. 206
A.2. La Qualit dun objectif ............................................................... .............................................. 206
A.2.1. LA QUALIT DU MATRIAU........................................................... ................................. 206
A.2.2. LA RPONSE SPECTRALE.................................................................................... ............. 206
A.2.3. LA DISTORSION.......................... ........................................................... ............................. 206
ANNEXE B .................................................. ............................................................ .......................................... 207
B. Le transfert des images ......................................................... .......................................................... ...... 207
B.1. Le transfert numrique................................................................... ............................................ 207
B.1.1. LA NORME RS 422 OU EIA 422 .......................................................... ......................... 207
B.1.2. LA NORME RS 644 OU EIA 644 .......................................................... ......................... 208
ANNEXE C.................................................. ............................................................ .......................................... 209
C Le modle de la distorsion des lentilles ........................................................... ..................................... 209
ANNEXE D.................................................. ............................................................ .......................................... 211
D.1. Le dtecteur de Harris............................................ ................................................................. .............. 211
ANNEXE E .................................................. ............................................................ .......................................... 213
E.1. Le calcul de la matrice fondamentale ........................................................... ........................................ 213ANNEXE F .................................................. ............................................................ .......................................... 215
F.1. Dtail de lextraction des paramtres intrinsques de la camra partir de la matrice fondamentale .. 215
F.2 Extraction des quations de Kruppa partir de la transformation pipolaire ....................................... 216
ANNEXE G.................................................. ............................................................ .......................................... 221
G.1. Dimensions des plaques......................... ........................................................... .................................... 221
4
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
7/226
Introduction Gnrale
INTRODUCTION GENERALE
1. CONTEXTE DE LA THESE
Si de nombreux aspects de notre vie sont devenus plus agrables grce l'utilisation de
technologies avances, il a fallu longtemps au secteur du transport pour combler son retard en
la matire. Aujourd'hui, ces progrs sont devenus incontournables. Les vhicules deviennent
de plus en plus srs, mais en contrepartie de plus en plus complexes; il est donc ncessaire
d'avoir recours l'automatisation pour prendre en charge les fonctions volues maintenant
disponibles. A cela se rajoute un trafic plus intense et un environnement plus dense. Il faut
pouvoir compter sur des systmes rapides et robustes pour prolonger la perception humaine.
Ces technologies, qui visent accrotre la scurit, le rendement et la commodit de laconduite, sont actuellement en cours de conception et de dveloppement. Ces systmes
doivent fonctionner en troite collaboration avec le conducteur. Le concepteur d'un vhicule
intelligent doit intgrer des technologies et des systmes disparates pour crer une machine
cohrente qui complte efficacement le conducteur humain.
Ainsi, le pari des chercheurs et des constructeurs automobiles est le dveloppement dun
vhicule intelligent , utilisant les avances rcentes en lectronique et en informatique. Le
vhicule intelligent doit pouvoir :
- Suivre la route,
- Se tenir dans la file correcte,
- Dtecter les pitons,
- Grer les inter-distances avec les autres vhicules,
- Adapter sa vitesse en fonction des conditions du trafic et des caractristiques de la
route,
- Changer la file pour suivre les vhicules et viter les obstacles,
- Trouver litinraire le plus court dans lenvironnement urbain,
- Echanger les informations avec linfrastructure et les autres vhicules,
- Etc !
Si le terme vhicule intelligent parat encore un peu prsomptueux, il traduit
cependant la part dj trs importante mais toujours croissante des systmes embarqus dans
les vhicules daujourdhui, puisque ceux-ci reprsentent environ 30% du cot total du
vhicule [Har.04].
5
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
8/226
Introduction Gnrale
Certains des systmes directement issus de travaux de laboratoire sont dsormais
disponibles sur les vhicules actuels. Parmi les plus clbres, nous pouvons citer linjection
lectronique, les airbag, lABS (Anti Bloking System), le rgulateur de vitesse ou encore le
systme daide la vision nocturne. Dautres dispositifs plus rcents sont en cours de tests et
concernent le concept des vhicules intelligents pour la ville appels communment Cybercars .
Paralllement aux efforts consentis pour amliorer lagrment et la scurit des
vhicules, les recherches se concentrent sur les systmes visant accrotre le rendement et
les conditions de circulation propres aux infrastructures dj en place. Ainsi, de nombreuses
quipes de recherche travaillent sur le concept de train de vhicules, emprunt au monde
ferroviaire, et bas essentiellement sur la notion dattelage virtuel . Les buts poursuivis
sont, entre autres, loptimisation de la circulation routire et lamlioration de la scurit sur
les autoroutes et les rseaux secondaires. Les retombes conomiques potentielles sont
nombreuses, que ce soit au niveau des constructeurs automobiles quau niveau des nouveaux
services que lutilisation des technologies associes aux vhicules intelligents permet de
proposer aux usagers de la route.
Ceci explique en partie pourquoi lamlioration ou loptimisation de la circulation
routire sont des problmatiques qui ont t tudies depuis longtemps. La possibilit de crer
dsormais des systmes daide la conduite accessibles au plus grand nombre ne fait
quaccrotre lintrt que celles-ci suscitent auprs de nombreux chercheurs et de grands
constructeurs automobiles.
2. CADRE DE LA THESE
Le travail prsent dans cette thse est le rsultat de la collaboration entre le
dpartement Gnie Informatique et Productique de lEcole des Mines de Douai (EMD GIP)
et le Laboratoire dAutomatique et Gnie Informatique et Signal (LAGIS). Il sinscrit dans le
cadre du programme AViVA ( Attelage Virtuel pour Vhicules Autonomes) du projet
AutoRIS ( Automatique pour la Route Intelligente et Sre ) men par le Groupement de
Recherche en Automatisation Intgre et Systmes Hommes-Machines (GRAISyHM). Ce
projet, soutenu par 10 Laboratoires et organismes de recherche de la Rgion Nord pas deCalais ( EMD GIP, ERASM, ESTAS (INRETS), GEMTEX (ENSAIT), LASL (ULCO),
LABOGP (FSA Bethune), LAGIS (EC Lille et USTL), LAMIH (UVHC), LEOST
(INRETS)), concerne le dveloppement des concepts de routes et de vhicules intelligents
afin doptimiser la circulation routire, amliorer la scurit, prserver lenvironnement et
proposer de nouveaux services aux usagers.
Il sagit principalement de concevoir et de dvelopper des systmes embarqus pour
laide la conduite et / ou lautomatisation de certaines tches qui peuvent amliorer les
conditions de circulation. Pour laide la conduite, lobjectif est dassister le conducteur dans
des situations difficiles (dtection dobstacles, vision nocturne, rgulation de vitesse, etc)
6
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
9/226
Introduction Gnrale
ou encore dautomatiser la conduite pour effectuer des tches spcifiques (dont lattelage
virtuel est un exemple). Dautres entits de recherche visent dvelopper des systmes daide
la navigation. Lobjectif de laide la navigation est de proposer aux usagers des transports
intelligents (vhicules touristiques, bus, etc) une nouvelle gamme de services tels que les
informations en temps rel sur les itinraires, des informations touristiques, des services derservations de chambres dhtels ou encore tout service susceptible dintresser le
conducteur au cours de son dplacement.
Le travail prsent ici concerne laide la conduite. Nous nous sommes intresss plus
particulirement la perception de lenvironnement lavant du vhicule afin dextraire les
informations ncessaires la mise en uvre dun attelage virtuel pour vhicules autonomes.
Cette approche vise remplacer les liaisons matrielles caractrisant les attelages mcaniques
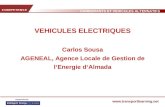
(dont un exemple est fourni dans la figure ci-dessous) par des chanes informationnelles : le
but est damliorer la fois la scurit et la flexibilit des vhicules en convoi.
Vhicule tracteur
liaison
Vhicule tract
~ amortissement
~ raideur
Longueur en rgime
permanent
C
T
T
yT
xT
Figure 1 : Exemple de liaison physique simple.
Lquivalent virtuel de cette liaison doit donc exhiber des proprits fonctionnelles
quivalentes (la liste ci-dessous nvoquant que celles qui nous intressent le plus
directement) :
- Assurer une certaine interdistance entre vhicules.
- Amener le vhicule tract sur une trajectoire compatible avec un suivi correct du
tracteur . Par correct , on entend une trajectoire qui satisfasse les contraintes
lies la scurit et le confort des personnes transportes et des autres usagers de
la route, des matriels utiliss et des infrastructures.
- Pouvoir spcifier le comportement dynamique de la liaison (par le biais par exemple
de paramtres similaires lamortissement et la raideur). Ces paramtres pouvant
tre adapts en ligne en fonction des conditions opratoires : conduite surautoroute, conduite en ville, etc.
7
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
10/226
Introduction Gnrale
- Pouvoir adapter la distance intervhiculaire en fonction de ces mmes conditions
opratoires. Il est en effet clair quen fonction de la vitesse absolue des vhicules
impliqus dans la liaison, les distances de scurit doivent tre augmentes.
La mise en uvre dune telle liaison virtuelle suppose donc que le vhicule tract
soit capable par lui-mme dapprcier la position relative du vhicule tracteur ( en faitla position relative en tant que telle, mais aussi lorientation et la vitesse relatives, aussi bien
linaire quangulaire). Lentit responsable (le pilote ) de la conduite du vhicule tract
doit donc, partir des grandeurs mesurables associes aux lments de lattelage, extraire des
informations exploitables et pertinentes, capables de le renseigner sur cette configuration
relative. A partir de celles-ci, compte tenu de lobjectif assign (distance intervhiculaire
principalement) et des paramtres de fonctionnement courant ( amortissement , erreur
admise, etc.) le pilote agit sur les organes permettant la manuvre du vhicule, savoir :
- Le volant (angle de braquage).- Lacclrateur.
- La commande de frein.
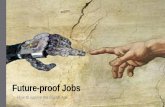
Linteraction entre les diffrents lments impliqus dans la mise en uvre dune liaison
virtuelle telle que nous venons de la dcrire est reprsente sur la figure suivante (figure 2).
Pilote
Angle de braquage
Action sur lacclrateur
Action sur les freins
Vhicule
tract
Distance,
orientation et
vitesses
relatives
Modification de la
Configuration rela-
-tive des vhicules
capteursgrandeurs mesurables
Informations exploitables
objectifs Paramtres de fonctionnement
Figure 2 : Interactions entre les constituants de la liaison virtuelle.
On voit que ce pilote se trouve lintersection entre laspect perception de
lenvironnement et laspect commande du vhicule. Il est donc clair que la conception
dune liaison virtuelle mobilise les disciplines connexes ces deux domaines. Ainsi, comme
le montre la figure 3, lextraction des informations pertinentes partir des mesures recueillies
sur le systme sera du ressort de la partie perception , tandis que llaboration dune loi de
commande sappuyant sur ces donnes et tenant compte de lobjectif et des paramtres de
fonctionnement, est dvolue laspect commande du problme.
8
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
11/226
Introduction Gnrale
Figure 3 : Organisation interne du pilote .
Le travail expos dans le prsent mmoire est relatif la partie perception de
lenvironnement . Il sagit pour nous de dfinir et de mettre au point un capteur permettant
de fournir les donnes ncessaires au contrleur pour piloter le vhicule tract .
Plusieurs approches peuvent alors tre adoptes, qui diffreront essentiellement par la
technologie des capteurs utiliss :
- Technologie par mission-rception : Elle consiste utiliser des capteurs mettanten uvre une technique base sur la rflexion dune onde mise par le capteur lui-
mme. On peut ranger dans cette catgorie des dispositifs tels que les radars, sonars et
lidars.
- Technologie par rception simple : Il sagit de capteurs exploitant un signal prsent
de faon naturelle et spontane dans lenvironnement. Les camras vidos sont
typiques de ce type de capteurs.
La technologie par mission-rception nimplique en gnral pas de traitements
complexes, grce la slectivit que procure les techniques employes, et les mesures
obtenues sont directes. Cependant, ds lors que des performances leves sont ncessaires,
cette technologie peut savrer chre et prsente dans tous les cas linconvnient majeur
dinterfrences entre capteurs du mme type, ds lors quils sont utiliss en grand nombre sur
une surface rduite (par exemple par des vhicules sur une route).
A contrario, les technologies par rception simple ncessitent des traitements
complexes afin dextraire linformation pertinente du bruit et ses performances sont
limites dans certaines situations (par exemple dans le brouillard ou lobscurit pour ce qui
concerne les capteurs dimages). En dpit de ces difficults, cette technologie prsente deux
avantages dterminants pour les transports intelligents.
9
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
12/226
Introduction Gnrale
Le premier dentre eux est le cot, qui reste faible comparativement la technologie par
mission-rception, ceci en partie grce aux rcentes avances techniques touchant les
dispositifs impliqus dans ce premier type de capteur.
Le second est directement li la nature de ces capteurs, qui les prserve de faon
intrinsque des interfrences entre dispositifs identiques. Cest en particulier pour ces deux
raisons que nous avons opt pour le dveloppement dun capteur par rception simple
rpondant des contraintes de cots strictes. Compte-tenu de la richesse des informations
quil est mme de procurer, celui-ci a pris la forme dun capteur de vision stroscopique, se
composant de deux camras et dune unit de traitement compact et conomique, que ce soit
financirement et nergtiquement.
La strovision est une technique qui utilise deux camras ou plus. Cette technique
ncessite des traitements complexes et sensible aux mouvements du vhicule et aux erreurs de
calibration. Dune manire gnrale, il est clair que toutes les techniques bases sur la visionsont sensibles certaines conditions mtorologiques et dclairage (nuit, brouillard).
Nanmoins, la strovision prsente des avantages trs intressants (certains de ceux cits ci-
dessous ne lui tant pas spcifiques):
Une quantit dinformations la fois trs importante et trs riche.
La possibilit de pouvoir sappliquer dune faon gnrique (sapplique tout
objet).
La reconstruction 3D sans requrir dinformations trs prcises sur la scneobserve.
Le Suivi des vhicules dans les courbes, l o le radar choue.
Une grande flexibilit, dans la mesure o un capteur de strovision permet
limplmentation des deux autres techniques en parallle (ce qui reprsente une
proprit intrinsque trs intressante).
La nature non intrusive de ce capteur (capteur passif), lui pargne les problmes
dinterfrences.
Le cot relativement modique dun systme de strovision bas sur des
composants standards le rend attractif en comparaison de capteurs actifs dots de
performances adaptes lapplication (radars, lidars, etc.)
Ces avantages font du capteur de strovision un outil de choix pour la perception de
lenvironnement du vhicule et justifie son emploi dans le cadre de notre projet. Malgr tout,
il est clair que son utilisation dans le domaine des transports nest pas sans poser certains
problmes.
10
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
13/226
Introduction Gnrale
Lobjectif principal du capteur stroscopique au sein de notre application est dextraire
linformation utile au contrle du vhicule (vitesse et distance relatives, orientation, etc)
partir du couple dimages pris au mme instant de deux points de vue diffrents.
Connaissant le modle de projection de chacune des deux camras, il sagit de calculer
les coordonnes 3D (par triangulation passive dans notre cas) dun ensemble de points
appartenant la scne observe partir de leurs projections sur les deux images. Pour y
parvenir, nous devons faire face aux problmes suivants :
Estimer le modle de projection de chacune des deux camras, cest dire calibrer
le capteur stroscopique.
Rsoudre le problme de la mise en correspondance. Ceci revient savoir associer
un pixel dans une image donne sa contrepartie dans lautre image,
correspondant la projection du mme point de la scne. Ce processus doit treeffectu en respectant les contraintes temps rel et de fiabilit propre
lapplication envisage. Une technique de mise en correspondance efficace et
rapide est prsente dans [Zay.03a].
Effectuer la reconstruction tridimensionnelle. Les problmes potentiels sont
principalement lis la calibration du capteur stroscopique et la triangulation.
Ne drogeant pas aux autres techniques mettant en uvre une rception simple ,
lexploitation de la strovision dans le cadre des transports routiers ncessite la mise en place
dun certain nombre dalgorithmes de traitement et danalyse dimages fortement coupls
entre eux, devant tre la fois robustes et rpondre des contraintes temporelles strictes
(surtout pour des application telles que le suivi automatique de vhicules). Cest en particulier
lobjectif de cette thse que daboutir un systme efficace et cohrent permettant de
respecter de telles contraintes de performances et de cot, ceci grce lemploi de mthodes
adaptes aux conditions imposes par un usage routier et par lexploitation de matriel
compatible avec le prix de la voiture de monsieur tout-le-monde .
3. OBJECTIF DE LA THESE
La technique fondamentale mise en uvre dans notre capteur, ( savoir la strovision)est un processus qui, partir de deux ou plusieurs images dune mme scne prises de
positions diffrentes, permet de retrouver la structure 3D de la scne observe. La
reconstruction 3D dune scne est assure par lexploitation conjointe des proprits
colorimtriques de la scne et des caractristiques gomtriques des camras.
Dans son principe, lattelage virtuel repose sur la capacit du capteur dvelopp
fournir des informations concernant la position et lorientation du vhicule prcdant celui
auquel il est li. Si on dsigne par tracteur le vhicule auquel on souhaite satteler, le
capteur doit tre capable dexploiter une (voire des) entit(s) inhrente(s) au vhicule tracteur,qui permettrait au besoin de le singulariser parmi des vhicules strictement identiques par
11
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
14/226
Introduction Gnrale
ailleurs. Le choix de cette entit est une problmatique en soi, puisque celle-ci doit exhiber
plusieurs proprits, savoir :
Cette entit doit tre prsente sur tous les vhicules tracteurs potentiels de faon
naturelle (ou plutt ds la sortie de lusine), puisque nous ne voulons pas modifier
lapparence de ceux-ci.
De faon (presque) antagoniste la proprit prcdente, lentit choisie doit prsenter
des variations de sorte pouvoir singulariser un vhicule prcis de faon univoque.
Le vhicule suiveur se trouvant ncessairement derrire le vhicule tracteur, lentit
choisie doit tre obligatoirement larrire du vhicule tracteur.
Elle doit tre facile distinguer de son environnement et doit prsenter des
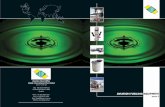
proprits gomtriques similaires pour tous les vhicules, afin que les algorithmesdvelopps soient gnriques tous les vhicules tracteurs potentiels.
Figure 4 : Exemple descne observe par le systme de localisation.
Les proprits nonces ci-dessus permettent de dresser une partie des spcifications de
notre capteur stroscopique, compte tenu de la ncessaire adquation devant exister entre
lentit dtecter et le couple algorithme / architecture afin de respecter nos contraintes de
temps de rponse et de robustesse. Les autres spcifications du capteur (dimensionnelles,
optiques, etc..) dcoulent directement des conditions dexploitation de celui-ci.
Dans cette thse, nous proposons donc un capteur stroscopique intelligent - de part sa
structure et lunit de traitement qui lui y associe - qui permet lextraction des informations
ncessaires la tche dattelage virtuel. Sa disposition gomtrique particulire lui permet
galement de proposer un fonctionnement adquat dans le cas de dfaillance dune seule
camra. Les lignes directrices de cette thse taient de proposer une solution matrielle bon
march, flexible et embarquable (compacit, disponibilit, basse consommation lectrique,
solidit, etc), mettant en uvre une solution logicielle modulaire, robuste et rapide,
accessible tous et permettant une volution continue en toute simplicit.
12
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
15/226
Introduction Gnrale
4. PLAN DU MEMOIRE
Lorganisation retenue pour ce mmoire est la suivante : aprs une prsentation dtaille
de la problmatique de lattelage virtuel et la justification des choix effectus en matire de
capteurs, le chapitre 1 dresse ltat de lart des vhicules intelligents puis prsente les
approches les plus communment adoptes dans le cadre de cette thmatique, en insistant plus
particulirement sur la conduite automatique de vhicule . Il passe en revue les solutions
exprimentales les plus prometteuses et les prototypes dvelopps travers le monde. Les
exemples prsents ont pour point commun de sappuyer sur la vision par ordinateur afin de
percevoir lenvironnement du vhicule. Bien entendu, le panorama prsent na pas prtention
lexhaustivit car seules nont t retenues ici les approches juges les plus intressantes du
point de vue de notre problmatique.
Dans le chapitre 2, nous introduisons la notion de capteurs intelligents et prsentons
les diffrentes dfinitions la base de ce concept. Le caractre utile du capteur intelligentpasse ncessairement par lanalyse de lacheminement de linformation, raison pour laquelle
une attention particulire est accorde ce point. Nous prsentons ensuite les diffrentes
architectures de capteurs intelligents et le rle de lintelligence dans ces derniers. Nous
abordons galement les diffrentes mthodes permettant dintgrer cette intelligence au
capteur. Enfin, nous passerons en revue les approches de conception des capteurs intelligents
que nous mettrons en application pour identifier les diffrents services et fonctionnalits que
doit approprier le capteur stroscopique intelligent pour raliser la tche de lattelage virtuel.
Cest le chapitre 3 qui constitue le cur de ce travail, puisquil sintresse laralisation et la mise en uvre de capteur stroscopique intelligent destin permettre la
mise en oeuvre dun attelage virtuel. Lune des particularits de ce travail est de se baser
uniquement sur les caractristiques visuelles dun vhicule banal, sans quil soit ncessaire
dinstrumenter le vhicule suivi (le tracteur ). Une dmarche bien particulire sera dtaille
tout au long de ce chapitre. Les rsultats obtenus montrent la faisabilit et lefficacit dune
telle approche.
Nous dtaillerons les diffrentes phases de lextraction des informations ncessaires
lattelage virtuel, depuis lacquisition des images stro en passant par la calibration descamras, la dtection de lentit dintrt, la certification de celle-ci, le suivie 2D et 3D et
pour finir lextraction des informations de position et dorientation intervhiculaire. Nous
prsentons par ailleurs dans ce chapitre une technique permettant le suivi du vhicule tracteur
avec une seule camra dans le but de pallier les dfaillances que peut subir notre systme au
cours de son fonctionnement.
13
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
16/226
LES VEHICULES INTELLIGENTS :
ETAT DE LART
Chapitre
Actuellement, lautomatisation de la conduite automobile est
sujette un grand intrt. En effet, ses potentialits sont nombreuses
et sduisantes, quil sagisse de loptimisation des infrastructures,
de lamlioration de la mobilit, de la minimisation des risques et du
temps de parcours et, par voie de consquence, de la consommation
dnergie.
Ce chapitre prsente les approches les plus communment utilises
dans le cadre de la thmatique vhicules intelligents , et plus
spcifiquement dans le contexte de la conduite automatique de
vhicule . Il passe en revue les solutions exprimentales les plus
prometteuses et les prototypes dvelopps travers le monde. Ceux-ci se
basent essentiellement sur des techniques dIntelligence Artificielle et sur
la Vision par ordinateur afin de percevoir lenvironnement du vhicule.
Nont t retenues ici que les approches juges les plus
intressantes du point de vue de notre problmatique. La fin du chapitre
est loccasion dvoquer les perspectives dvolution pour les dcennies
venir de ce domaine en constante mutation que constitue les
vhicules intelligents .
I.1. INTRODUCTION
u cours des dernires dcennies une grande importance a t donne aux systmes
de transport afin damliorer les conditions de scurit, doptimiser l'exploitation des
rseaux routiers, de diminuer la consommation d'nergie et de prserverl'environnement.
Les efforts consentis pour rsoudre ces problmes ont ouvert un nouveau domaine de
recherche et d'application, savoir, la conduite automatise de vhicule, dans lequel des
nouvelles techniques sont exploites pour automatiser entirement ou partiellement les tches
14
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
17/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
de la conduite.
Les diffrentes tches en question sont reprises dans la liste ci-dessous (qui na pas
prtention lexhaustivit) :
Suivre la route,
Se tenir dans la file correcte,
Se maintenir une distance sredesautres vhicules,
Dtecterles pitons,
Adapter la vitesse du vhicule en fonction des conditions de trafic et descaractristiques de la route,
Changer de file pour suivre les vhicules et viter les obstacles,
Trouver l'itinraire le plus court vers une destination donne,
Se dplacer et stationner dans lenvironnement urbain.
L'intrt pour les technologies des systmes de transport intelligents (ITS) est apparu
depuis une vingtaine dannes quand le problme de la mobilit des personnes et des
marchandises commenait se poser avec une plus grande acuit, favorisant ainsi la
recherche de solutions alternatives.
Des institutions gouvernementales ont activ cette phase initiale de prospection aumoyen de divers projets impliquant un grand nombre dunits de recherche qui ont travaill
dans une voie cooprative afin de produire plusieurs prototypes et de mettre en uvre les
solutions pressenties, toutes bases sur des approches assez diffrentes les unes des autres.
En Europe, le projet PROMETHEUS1a commenc cette tape exploratoire en 1986. Le
projet a impliqu plus de 13 constructeurs automobiles et plusieurs units de recherches
gouvernementales et universitaires de 19 pays europens. Dans ce cadre, un certain nombre
dapproches diffrentes des ITS2ont t conues et mises en application.
Aux Etats-Unis la majeure partie des initiatives a t lance afin de traiter le problme
de la mobilit, impliquant plusieurs universits, centres de recherches et compagnies
automobiles. Aprs cette phase pilote, le gouvernement amricain a tabli le NAHSC3
[Bis.97] en 1995.
1PROgraM for an European Traffic with Highest Efficiency and Unprecedented Safety2Intelligent Transportation Systems, comme indiqu prcdemment.3NAHSC:National Automated Highway System Consortium
15
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
18/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
Au Japon, o le problme de mobilit est beaucoup plus important, quelques prototypes
de vhicules ont t dvelopps dans le cadre de diffrents projets. A linstar de ce qui sest
produit aux USA, lAdvanced Cruise-Assist Highway System Research Association
(AHSRA) a t fonde en 1996 de manire impliquer un grand nombre d'industriels de
lautomobile et de centres de recherches [Tok.97], qui ont conjointement dveloppdiffrentes approches relatives la conduite automatise de vhicule.
Nous pouvons galement citer le projet coopratif international ATLANTIC4 qui a
dbut en 2001, impliquant plusieurs laboratoires de recherches europens et Nord
Amricains. Ce projet se dcompose en 8 thmatiques5 de recherches distinctes sur les
systmes de transports intelligents [Gin.04].
Les rsultats principaux de cette premire tape se rsument dune part une analyse
profonde du problme et dautre part au dveloppement d'une tude de faisabilit,
indispensable la comprhension des exigences et des implications de ce quil est convenudappeler dornavant la technologie ITS .
Le domaine de lITS entame maintenant sa deuxime phase, quon peut caractriser par
une maturit dans ses approches et par lavnement de nouvelles possibilits technologiques
qui permettent le dveloppement des premiers produits exprimentaux. Un certain nombre de
prototypes de vhicules intelligents ont t conus, mis en oeuvre et tests sur route. La
conception de ces prototypes rsulte aussi bien de lanalyse critique des rsultats issus
directement de la recherche sous-jacente que de lapport dautres disciplines, parmi lesquelles
la Robotique, lIntelligence Artificielle, lInformatique, les Tlcommunications,lAutomatique, le Traitement du Signal, pour ne citer que celles-ci.
Initialement, les dispositifs technologiques les plus adapts au problme de la perception
dans le cadre du problme pos (camras infrarouges, radars, sonars, etc.) taient drivs
dapplications militaires trs coteuses. Cependant, grce leffet conjugu de lengouement
croissant pour les applications ITS et du progrs de la production industrielle, la technologie
daujourdhui offre des capteurs et des systmes de traitement des prix trs comptitifs.
Pour valuer et comparer les diffrentes approches, ces prototypes de vhicules
automatiques sont quips d'un grand nombre de capteurs et de calculateurs.
LEurope, de son ct, finance depuis de nombreuses annes des projets sur
llectronique embarque et les vhicules intelligents. Aujourdhui, au-del des
dveloppements industriels potentiels pour laide la conduite ou la conduite automatise, la
vocation de ces projets est clairement de fdrer les recherches et les dveloppements des
diffrents acteurs europens. Parmi les diffrents projets en cours, Carsense [Lan.01] runit 12
4ATLANTIC: AThematicLong-term Approach to Networking for the Telematics and ITS Community5http://www.atlan-tic.net/
16
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
19/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
partenaires6depuis janvier 2000 : Les constructeurs automobiles, des quipementiers et des
instituts de recherche. Lobjectif de ce projet est de proposer un systme daide la conduite
faible vitesse (de lordre de 30 km/h) aussi complet que possible, adapt des situations
complexes comme la conduite en ville. Le concept cl de ce systme repose sur les
performances de lensemble des capteurs quipant le vhicule : radars, lasers, camras,capteurs ultrasons, etc.. . Le but est den extraire suffisamment dinformations pour bien
valuer lenvironnement du vhicule et tre capable de prendre une dcision tout en respectant
les contraintes temporelles imposes par ce type dapplication. Deux autres projets majeurs,
financs par la commission europenne ont dbut en 2001 pour une dure de trois ans :
CyberCars7 [Par.03] lanc en aot 2001 et CyberMove8 [Ram.04] lanc en dcembre 2001.
Les deux projets runissent treize partenaires9. Il convient par ailleurs de citer le projet
ARCOS10[Arc.03] qui a dbut au mois de janvier 2002.
Comme nous lavons prcis au dbut de ce mmoire, dans le cadre de notre projet de
recherche sur les vhicules intelligents et les ITS, nous nous intressons plus particulirement
aux systmes bass sur la vision par ordinateur. Avant toute chose, il est ncessaire de revenir
de faon plus dtaille sur les motivations qui sont la base du dveloppement de tels
dispositifs, en prcisant quelles sont leurs particularits et les contraintes qui sy appliquent.
Une attention toute particulire sera consacre aux approches les plus reprsentatives ou au
moins les plus applicables , au problme de lattelage virtuel tel que nous lavons introduit.
Pour terminer, nous tenterons de tracer les grandes lignes des perspectives dvolution des
vhicules intelligents.
I.2. LA CONDUITE AUTOMATISEE DES VEHICULES
Avant dadopter une stratgie dautomatisation de la conduite, il est lgitime dexplorer
les diffrentes faons daborder le problme. Cest le but des sections qui suivent.
I.2.1. QUE FAUT-IL AMELIORER, LES VEHICULES OU LES
INFRASTRUCTURES ?
Lautomatisation de la conduite automobile peut se baser sur des modifications de la
structure routire ou (de faon non exclusive) sur des modifications des vhicules eux-mmes.Selon les spcificits de lapplication, chacune de ces deux alternatives possde des avantages
6Partenaires du projet Carsense : Autocruise, BMW, CRF, Thales, INRETS-LEOST, Renault, IBEO, Jena-Optronik, INRIA, LIVIC,
TRW Automotive, ENSMP.7Cybernetic technologies for the car in the city.8Cybernetic transportation systems for the cities.9 Partenaires du projet CyberCars : INRIA (France), RUF (Danemark), FIAT research (Italie), Universit de Bristol (GB), FROG
Navigation Systems (Pays-bas), Yamaha (Japon), Robosoft (France), Technion (Isral), TNO (Pays-bas), Universit de Southampton (GB),
Serpentine (Suisse), Universit de Coimbra (Portugal), Autos et Energies (Suisse).
Partenaires du projet CyberMove : Les 13 partenaires cits ci-dessus ainsi que GEA (Suisse).
17
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
20/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
et des inconvnients. L'amlioration des infrastructures routires peut apporter des bnfices
aux types de transport bass sur des itinraires pr-dfinis, comme cest le cas pour les
transports en commun et la robotique industrielle (pour exemple la transitique base sur
un filoguidage ou un dispositif assimilable). Cependant, cette approche exige une organisation
et un entretien complexes et tendus qui peuvent devenir encombrants et extrmement chersdans le cas des rseaux routiers de grandes dimensions. Une restructuration de
l'environnement ne peut tre raisonnablement applique qu un sous-ensemble rduit du
rseau routier (par exemple une route entirement automatise que seuls des vhicules
automatiques, publics ou privs, pourraient emprunter). Pour cette raison, les systmes qui se
raliseront court terme doivent pouvoir tirer profit des infrastructures dj existantes, ce qui
autorise de substantielles conomies en matire dinfrastructure en comparaison de la
premire solution voque. Par consquent, les travaux des chercheurs sorientent plus
essentiellement sur lamlioration des vhicules.
I.2.2. QUELLES SONT LES EXIGENCES QUE DOIT SATISFAIRE UNE
APPLICATION ITS ?
Comme tous les autres, les systmes de transport intelligents disposent de certaines
spcificits qui sont directement lies leur domaine dapplication. A ces spcificits
sassocient des contraintes particulires.
Ainsi, pour [Ber.00], n'importe quel systme embarqu pour une application ITS doit
satisfaire certaines exigences vitales :
Le systme final doit tre assez robuste pour s'adapter aux diffrents tats et
changements denvironnement, de route, de trafic, d'clairage, ainsi qu des
conditions mtorologiques variables.
Les systmes embarqus propres aux applications ITS sont des systmes de sret
critique pour lesquels un haut degr de fiabilit est exig. Par consquent, le projet
doit tre approfondi et rigoureux pendant toutes ses phases, de la spcification des
exigences la conception et la mise en oeuvre. Une phase intensive de mise
l'preuve et de validation est donc d'une importance capitale.
Afin de rendre la technologie ITS accessible au plus grand nombre, et par
consquent rendre cette dernire attractive pour les industriels du secteur, la
conception d'un quipement ITS doit intgrer ds le dpart des contraintes de cot
stricts11. Les dpenses de tout ordre (comme la consommation lectrique) doivent
tre tenues aussi basses que possible, puisque les performances du vhicule (quelles
soient techniques ou conomiques) ne doivent pas tre affectes ngativement par
l'utilisation du systme ITS.
11Le cot du systme embarqu ne doit pas dpasser 10 % du prix de vhicule.
18
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
21/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
Le matriel et les capteurs du systme doivent tre compacts et discrets. Ils ne
doivent par ailleurs pas dtonner vis--vis du style du vhicule.
Enfin, puisque les systmes ITS doivent tre dclenchs et contrls par un
oprateur humain, ils ont besoin d'une interface homme-machine conviviale, simple,
ractive et efficace.
I.2.3 QUEL TYPE DE CAPTEURS UTILISER ?
Lensemble des capteurs utiliss dans le cadre de la Robotique Mobile dintrieur
(Indoor) ne sapplique pas avec le mme bonheur lorsquil sagit dquiper un systme ITS,
destin affronter le monde extrieur dans des conditions trs variables. Ainsi, les capteurs
tactiles et les capteurs acoustiques sont inappropris pour les applications impliquant des
vhicules moteur voluant vitesse leve [Ber.00], du fait de la proximit que ncessitent
les premiers et de la sensibilit au mouvement relatif lair qui affecte les seconds.
Les capteurs base de laser et les radars exploitent la rflexion dun signal mis par le
dispositif sur un obstacle. La mesure elle-mme repose principalement sur la dtermination
dun temps de vol ou par la caractrisation dune onde de battement (issu du produit entre
signal mis et signal rflchi). Etant lorigine du signal permettant la mesure, nous les
classifierons en tant que capteur par mission-rception . Leurs principaux inconvnients
sont la basse rsolution spatiale (en gnral) et leur temps dacquisition relativement
important.
Les capteurs bass sur la vision, ntant pas lorigine du signal permettant la mesure,sont a contrario dfinis en tant que capteurs par mission simple et ont un avantage
intrinsque par rapport leurs homologues par mission rception qui est (par essence) la
facult dacqurir les donnes sans modifier l'environnement (capteur non intrusif).
Malheureusement, de par leur nature mme, les capteurs de vision sont davantage perturbs
que les radars par le brouillard, le manque ou lexcs de lumire, etc. En somme, mme si les
effets peuvent tre exacerbs ou, au contraire attnus, les capteurs de vision sont sensibles
aux mmes perturbations que la vision humaine elle-mme.
En outre, les capteurs par mission-rception possdent quelques particularits qui leursdonnent des avantages sur la vision dans certaines applications spcifiques : ils effectuent
certaines mesures (comme celle du mouvement) d'une faon plus directe que la Vision en
exigeant moins de ressources en calcul car devant acqurir une quantit considrablement
infrieure de donnes pour parvenir lestimation voulue.
En dpit de ces indniables qualits, le problme principal des capteurs par mission-
rception est l'interfrence entre capteurs du mme type, qui peut devenir critique lorsquun
grand nombre de vhicules se dplacent simultanment dans le mme environnement (comme
dans le cas de vhicules automatiques roulant sur des autoroutes intelligentes.).
19
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
22/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
Il est clair quun tel problme ne se pose pas dans le cadre de l'utilisation de capteurs par
rception simple, tels que des camras. Ceci constitue donc un atout majeur pour lapplication
envisage.
Le tableau 1 regroupe de faon synthtique les forces et faiblesses de chacune de ces
deux familles de capteur :
Remarque : Evidemment, la vision naugmente pas ncessairement les capacits de dtection
au-del des possibilits humaines (en prsence dun important brouillard ou la nuit en
labsence dclairage spcifique, par exemple), mais elle peut par contre aider le conducteur
en cas de dfaillance (manque de concentration, fatigue, etc.)
- Par nature, sensibles aux
conditions dacquisition.
- Trs peu (voire pas du tout) intrusifs.PPaarr RRcceeppttiioonn
ssiimmppllee (( ddiittss iiccii
PPaassssiiffss1122))
- Interfrences entre les capteurs
du mme type.
- Mesures directes,
- Exigent comparativement moins de
ressources de calcul,
- Robustesse vis--vis de certaines
conditions de fonctionnement
dgrades.
PPaarr EEmmiissssiioonn
RRcceeppttiioonn ((ddiittss iiccii
AAccttiiffss1122))
IInnccoonnvvnniieennttssAAvvaannttaaggeessLLeessccaapptteeuurrss
Tableau I.1 : Comparaison entre capteurs actifs 12et capteurs passifs 12.
La nature non intrusive des capteurs passifs en gnral et la richesse que procure la
vision en particulier fait de cette dernire une approche incontournable dans le domaine des
vhicules intelligents.
I.3. LA VISION DANS LE DOMAINE DES VEHICULES
INTELLIGENTS
Des questions importantes doivent tre soigneusement traites durant la phase de
conception des systmes de vision ddis aux applications automobiles. Les paragraphes qui
suivent traitent de ces dernires :
12G. Hash, entre autres, dfinit un capteur actif par sa facult produire une forme dnergie (en gnral sous forme lectrique) lorsquil
est excit par le signal mesurer, tandis quun capteur passif modifie certaines de ses caractristiques (par exemple sa rsistance) sous
linfluence de ce signal Ici, le terme actif dsigne des capteurs devant exciter leur environnement pour produire un signal
exploitable- alors que le terme passifs se rapporte des capteurs utilisant un signal spontanment disponible.
20
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
23/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
En premier lieu, les systmes ITS sont plus exigeants que dautres applications
en terme des contraintes temporelles (temps-rel). En effet, le temps de
rponse du systme se doit dtre en accord avec la vitesse de dplacement du
vhicule, qui peut tre leve. De faon antagoniste, les applications de Vision
ncessitent le traitement dun flux important de donnes. Le dfi que posent lestechniques de Vision artificielle dans le contexte de ce type dapplication est
donc dtre capable de traiter une grande quantit de donnes de faon fiable et
en temps-rel. Des architectures et des techniques spcifiques la satisfaction
de cette double contrainte sont, par consquent, un domaine de Recherche trs
actif [Cab.99, Har.04, Iss.04, Lab.04, Per.05].
Deuximement, dans le domaine de l'automobile, aucune supposition ne peut
tre faite sur les paramtres principaux (comme par exemple l'clairage de la
scne observe ou le contraste des tons) influant directement sur les
informations prises en compte par le capteur de vision. Par consquent, le
traitement ultrieur doit tre assez robuste pour s'adapter des conditions
environnementales diffrentes (comme le soleil, la pluie, le brouillard) et
leurs changements seffectuant avec des dynamiques trs variables, tels que les
transitions entre le soleil et l'ombre ou l'entre ou la sortie d'un tunnel.
Pour finir, d'autres problmes-cls, tels que la tolrance aux mouvements
propres du vhicule (par exemple roulis, tangage, etc.) et les drives dans la
calibration des camras, doivent aussi tre traits.
Les avances rcentes en informatique et dans les technologies des capteurs ont favoris
l'utilisation de la vision galement dans le domaine des vhicules intelligents. Les progrs du
matriel informatique, en particulier au niveau du degr d'intgration et de la diminution de la
tension d'alimentation, permettent de produire des machines de vision plus puissantes, moins
dispendieuses en nergie (et donc plus facilement embarquables ), des prix accessibles.
De nombreux autres facteurs13doivent tre pris en compte lors de la conception et du
choix dun dispositif dacquisition dimages. Les choix peuvent se porter sur de la Vision
monoculaire (une seule camra), ou binoculaire (strovision), voire multiculaire (approche multi camras). Dautres paramtres importants sont lis langle de prise de
vue, qui se doit dtre adapt lapplication envisage (surveillance globale des abords du
vhicule ou accostage, par exemple), de mme que la rsolution et la profondeur14des images.
Les contraintes fixes doivent par ailleurs permettre de faire un choix entre lexploitation
dimages en couleurs ou en niveaux de gris.
13Si nombreux que lnumration ci-dessous est ncessairement incomplte !14Profondeursignifie le nombre de bits par pixel
21
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
24/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
Au-del des considrations sur la structure du capteur et la nature des donnes retenues,
d'autres caractristiques, intrinsques au capteur, doivent tre prises en considration, tels que
le temps dintgration et la dynamique du capteur.
Conclusion : Bien que fortement exigeante et extrmement complexe analyser ; la richesse
des informations fournies par la Vision (dont il a t valu quelle constitue 90% des
donnes exploites par un conducteur dans sa tche de pilotage) en fontun des moyens les
plus puissants pour percevoir lenvironnement et a, de ce fait, t largement utilise pour
traiter un grand nombre de problmes dans le domaine de la conduite automatique, [Cou.02,
Ste.02, Lab.02].
I.4. LE SUIVI DE LA ROUTE
Lesuivi automatique de la routeest sans doute lune des approches ayant suscit le plus
de travaux ces dernires dcennies. Sa mise en uvre repose sur deux modulescomplmentaires assurant les tches suivantes :
- La dtection des lignes sparant les diffrentes files de la chausse, la
modlisation de la route, la dtermination de la position relative du
vhicule par rapport la voie et l'analyse de la direction des autres
vhicules.
- La dtection et la localisation des obstacles se trouvant ventuellement sur
la trajectoire actuelle du vhicule.
En effet, la dtection et la localisation des obstacles est une partie intgrante de la tche
du suivi automatique de la route. De ce fait, ces deux thmatiques de recherche dans le
domaine des transports intelligents se sont forgs une destine commune. Dans ce qui suit,
nous voquons plus en dtails la dtection des marquages au sol et la dtection des obstacles.
I.4.1. DETECTION DES MARQUAGES AU SOL
Dans la plupart des prototypes de vhicules intelligents dvelopps travers le monde,
le suivi de la route est divis en deux tapes, du type perception et action :initialement, la position relative du vhicule est calcule par rapport la voie, et ensuite les
actionneurs le maintiennent dans la configuration correcte. Quelques exemples des stratgies
qui peuvent tre adoptes pour rsoudre le problme du contrle latral sont prsents dans
[Tay.99].
Cependant, certains des premiers systmes n'taient pas bass sur la dtection
prliminaire de la position du vhicule par rapport la route, mais dterminaient directement
les commandes des actionneurs (steering wheel angles) partir des images acquises. Ainsi,
22
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
25/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
dans le cadre du projet ALVINN15[Joc.93a], le systme est bas sur une approche par rseaux
de neurones : il est capable de suivre la route aprs une phase danalyse dun grand nombre
d'images. Quoiquil en soit, la position des marquages sur la route tant utile dautres sous-
systmes de dispositifs comparables, la localisation de ceux-ci est de toute faon
gnralement excute.
Bien entendu, les systmes tels que ceux prcdemment cits ne sont pleinement
efficaces que lorsque les files sont matrialises par des lignes au sol. Dautres ralisations,
telles que le SCARF [Cri.91] et PVR16III [Kim.95], ont t conues pour exploiter des routes
peu structures. Ces systmes sont bass sur l'utilisation de camras couleur et exploitent
lhypothse qu'une route est colore de faon homogne afin de dtecter celle-ci dans les
squences dimages.
Dans plusieurs cas, la dtection de la route est rduite la dtection de certaines
structures spcifiques cette dernire. Ces mthodes simplifient la dtection, mais doiventnanmoins faire face deux problmes majeurs qui sont :
La prsence des ombres, qui produit de pseudo-objets sur la surface de la route
et en modifie localement la texture. La plupart des groupes de recherche font face
ce problme en utilisant des algorithmes de filtrage d'images trs sophistiqus
gnralement appliqus des images en niveau de gris. Dans de plus rares cas, des
images en couleur sont utilises. Le vhicule intelligent MOSFET17[Mic.97] utilise
par exemple un algorithme de segmentation couleur maximisant le contraste entre le
marquage des lignes et la route.
Les marquages sur la route occults par dautres vhicules. Pour faire face ce
problme, certains systmes traitent seulement une rgion de la route o l'absence
d'autres vhicules peut tre raisonnablement suppose. Ainsi, les vhicules
intelligents LAKE et SAVE traitent la partie d'image correspondant aux 12 mtres
les plus proches devant le vhicule. Des travaux tels que [Cod.97] ont montr que
cette approche permet de manuvrer le vhicule sur les autoroutes sans risque.
Sappuyant sur une technique toute autre, le systme RALPH18 [Pom.96] rduit
la
partie de l'image traite grce aux rsultats d'un module de dtection d'obstacle base de radar. Le groupe de recherche du Laboratoire Rgional Des Ponts et
Chausses de Strasbourg exploite lhypothse qu'il doit toujours y avoir un contraste
chromatique entre la route et son environnement (ou les obstacles), au moins dans
15ALVINN: Autonomous Land Vehicle In a Neural Net16SCARF: Supervised Classification Applied to Road Following
PVR: POSTECH Vehicle Road17MOSFET: Michigan Off-road Sensor Fusing Experimental Testbed.18RALPH: Rapidly Adapting Lateral Position Handler
23
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
26/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
une composante de couleur. En sappuyant sur cette hypothse, le concept de
saturation chromatique [Cha.98] est utilis pour sparer les composantes.
En raison des contraintes physiques et de continuit, le traitement de l'image entire peut
tre rduit l'analyse dune rgion d'intrt. C'est la stratgie gnralement adopte en
exploitant des connaissances a priorisur l'environnement de la route. Par exemple, le systme
dvelopp par le groupe de recherche de Robert Bosch GmbH [Gol.98] utilise un modle
dynamique de la route et du vhicule afin de dterminer la partie de la route o il est
susceptible de trouver les marquages au sol.
Lhypothse raliste dune largeur fixe de la route (en premire approximation) permet
de perfectionner le critre de recherche, en limitant cette dernire aux marquages presque
parallles. Le vhicule PVR III [Kim.95] utilise les rseaux de neurones et des algorithmes de
vision afin daccomplir cette tche. De faon analogue, le systme RALPH [Pom.96] traite la
partie de limage correspondant 20 70 m devant le vhicule. Leffet de perspective estcontrebalanc par calcul sur cette zone de limage, la courbure de la route est ensuite estime
en comparant cette zone un certain nombre de modles comportant des marquages
parallles.
La reconstruction gomtrique de la route est simplifie par des suppositions concernant
sa forme. Les groupes de recherche de lUniversitat der Bundeswehr [Lt.98] et Daimler-
Benz [Fra.98] dtectent la route en se basant sur un modle spcifique: les marquages au sol
sont modliss sous la forme de clothodes19. Lavantage dune telle modlisation est que la
connaissance de deux paramtres est suffisante pour dfinir compltement la localisation dumarquage au sol et permet de dterminer dautres grandeurs telles que la compensation
latrale et langle de direction. Dautres groupes de recherche utilisent une reprsentation
polynomiale des marquages au sol. Ainsi, le vhicule intelligent MOSFET [Mic.97] exploite
pour ce faire des paraboles, une transformation simplifie de Hough tant ensuite employe
pour accomplir la procdure dadaptation.
Dautres systmes sappuient quant eux sur un modle gnrique de la route. Par
exemple, le systme ROMA [Tok.97] utilise une approche de la Vision base de contours.
Un modle dynamique permet le traitement de petites rgions en temps rel. Les contoursforms par des pixels qui ont une valeur de direction de gradient significative font lobjet
dune procdure de tracking (poursuite). Dune manire analogue, un modle triangulaire
gnrique de la route a t dvelopp pour le vhicule exprimental MOB-LAB par les
groupes de recherche de Universit Di Parma [Bro.95] et Istito ElectroTecnicoNazional
[Den.94] G.Ferraris.
La connaissance a priorides paramtres de calibration du systme de vision et certaines
hypothses sur ltat de la route (route plate en particulier) simplifient la mise en
19Dans une clothode la courbure dpend linairement de la rfrence curviligne.
24
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
27/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
correspondance entre les points des images dune part et les points des images et leurs
coordonnes dans un repre li la scne observe dautre part.
Remarque:Pour dterminer la distance avec un obstacle ou encore la courbure de la
route, la grande partie des systmes prsents prcdemment supposent que la route devant levhicule est plate.
Le systme GOLD20[Ber.98] implment sur le vhicule intelligent ARGO, ainsi que le
systme RALPH, exploitent lhypothse que la route est localement plane. La corrlation
temporelle entre les images successives est gnralement utilise pour valider le rsultat.
Hypothse Avantages Inconvnients
Rgion dintrt - Analyse temps-rel, - Le choix de la rgion dintrt est
critique.
Largeur de la route fixe - Amlioration des critres derecherche,
- Robustesse vis--vis des
phnomnes de type ombres .
- Nest pas adapte des routes dont
la largeur est variable.
Forme de la route - Robustesse par rapport auxombres,
- Simplification de la phase de
reconstruction de la gomtrie de la
route,
- Contrle simplifi.
- Ncessit dune grande puissance
de calcul,
- Ncessite une bonne adquation
route relle / modle.
Les connaissances a
priori de la route
surface / inclinaison
- Simplification de la mise en
correspondance entre les pixels des
images et les coordonnes relles
(dtermination des distances avec
les obstacles et de la courbure de la
route).
- Les hypothses (par exemple, route
plate) ne sont en gnral satisfaites
quen premire approximation,
- la recalibration du systme
stroscopique est souvent
ncessaire.
Tableau I.1 : Avantages et inconvnients des hypothses classiques faites dans lecadre de la dtection de routes.
I.4.2. DETECTION DES OBSTACLES
Certains systmes limitent la dtection des obstacles la localisation des autres
vhicules, ils sappuient alors principalement sur la recherche de modles spcifiques dans
limage, procd qui peut tre utilement renforc par des considrations de forme et de
symtrie des objets recherchs (les vhicules).
20GOLD: Generic Obstacle and Lane Detection.
25
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
28/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
Lalgorithme de dtection dobstacles dvelopp lUniversitat der Bundswehr [Lt.98]
se base sur la dtection des contours et la modlisation des obstacles ; le systme est capable
de dtecter et traquer jusqu 12 objets autour du vhicule. Les variables continuellement
mises jour et associes aux obstacles sont : la distance, la vitesse relative, lacclration
relative, la position latrale, la vitesse latrale et la taille.
Dans lexemple cit prcdemment, la dtection des obstacles exploite des modles
spcifiques, de ce fait le traitement dune seule image suffit, mais lapproche manque
defficacit dans le cas o lobstacle ne correspondrait pas suffisamment aux modles.
Une dfinition plus gnrale, qui compliquera videmment les algorithmes, considre
que tout objet se trouvant sur le chemin du vhicule est un obstacle. Autrement dit, toute
dformation de la route correspondra un obstacle potentiel. Dans ce cas, la dtection des
obstacles est rduite lidentification de lespace libre devant le vhicule :
Figure I.1 : Les techniques de dtection utilises pour les diffrentes dfinitions desobstacles considres[Ber.00].
Ladoption de cette dfinition exige lutilisation de techniques de dtection plus
complexes ; les plus connues sont :
Lanalyse de type flux optique.
Le traitement dimages non monoculaires.
Dans le premier cas plusieurs images sont acquises par le mme capteur des instantsdiffrents. Dans le deuxime cas, plusieurs camras acquirent des images simultanment de
26
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
29/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
diffrents points de vue. En plus de leur complexit intrinsque cause par la quantit de
donnes traiter, ces techniques doivent tre suffisamment robustes vis--vis des
imprcisions, incertitudes et indterminations causes par le mouvement du vhicule et les
drives dans la phase de calibration des camras.
La technique duflux optiqueexige lanalyse dune squence de deux images au moins.
Un vecteur 2D des mouvements horizontaux et verticaux de chaque pixel est alors calcul
dans lespace image. Le rsultat est utilis pour estimer le mouvement. Certains systmes
extraient le dplacement directement de lodomtre ; les obstacles sont dtects en analysant
la diffrence entre les domaines de mouvements prdits et rels. Le systme ROMA [Kru.95]
intgre un module de dtection dobstacles qui est bas sur la technique du flux optique et sur
lanalyse des donnes fournies par un odomtre. De la mme faon, ASSET-2 21 est un
systme compltement temps rel pour la segmentation et la dtection des objets qui se
dplacent de faon autonome. Sa particularit essentielle rside dans le fait quil nexige pas
la calibration de la camra. Il traque les objets et il est capable de traiter correctement les
occultations des obstacles. Chaque nouvel objet automoteur qui entre dans la scne initie
automatiquement une nouvelle procdure de tracking. Initialement, ASSET-2 construit un
domaine de flux clairsem et segmente ensuite limage obtenue en rgions prsentant des
variations de flux homognes. La corrlation temporelle [Smi.95] est utilise pour filtrer le
rsultat, dont on amliore ainsi lexactitude.
En ce qui concerne le traitement des images non-monoculaires, ce dernier exige la mise
en correspondance des pixels des diffrentes images : deux images pour la strovision
binoculaire et trois dans le cas de la strovision trinoculaire. Lavantage danalyser desstros images (deux ou trois images) au lieu dune squence dimages monoculaires se
rsume dans la possibilit de dtecter directement la prsence dobstacles (par exemple grce
lanalyse des disparits), ce qui nest pas possible pour la vision monoculaire. De plus, dans
des conditions limites o le vhicule et les obstacles ont des vitesses faibles ou nulles,
lapproche base de flux optique ne dtecte pas les obstacles, tandis que la strovision, elle,
nest pas prise en dfaut.
Le projet UTA22du groupe de recherche Daimler-Benz visait dvelopper un systme
intelligent (Stop & go) lintrieur de la ville en adoptant la strovision pour extrairelinformation 3D en temps rel. Le prototype dvelopp [Fra.98] est par ailleurs capable de
reconnatre les signes du trafic, les balises de signalisation, les pitons, les passages protgs
et les lignes darrt.
Le groupe de recherche de MIT23, a dvelopp un systme de strovision pour la
dtection tridimensionnelle des routes et la visualisation du trafic, qui peut tout aussi bien tre
21ASSET-2:A Scene Segementation Establishing Tracking v222UTA: Urban Traffic Assistant.23MIT: Massachussetts Institute of Technology.
27
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
30/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
adapt d'autres applications. Le systme est capable de sparer les vhicules partiellement
chevauchs et de les distinguer depuis leurs ombres.
En outre, pour diminuer la complexit intrinsque de la strovision, des contraintes
spcifiques au domaine sont gnralement adoptes.
Dans le systme GOLD, la suppression de l'effet de perspective dans les images stro
[Bro.99a], permet d'obtenir deux images qui ne peuvent diffrer lune de lautre quen
prsence dun ou plusieurs obstacles ou si lhypothse de planit de la route nest pas
respecte. Dans le cas contraire, il sagit alors dun systme dtectant l'espace libre devant le
vhicule.
Dune faon similaire, lunit de recherche de lUniversit de Californie [Kol.95], a
dvelopp un algorithme qui rectifie l'image gauche en utilisant le point de vue de l'image
droite, dtectant ainsi les obstacles partir de lanalyse des disparits. Dans cette optique, unfiltre de Kalman est utilis pour suivre les obstacles.
Des algorithmes de dtection dobstacles plus rcents ont t dvelopps dernirement.
Nous pouvons citer titre dexemple lalgorithme de dtection dobstacles avec un
stroscope compos de deux camras matricielles dans le cadre du projet ARCOS [Lab.04]
ou encore la technique de dtection dobstacles rapide base sur un stroscope compos de
deux camras linaire (voir [Har.04]), ces techniques ont le mrite dexploiter uniquement les
proprits gomtriques de la projection de la scne sur les camras pour pouvoir dtecter un
obstacle.
Le tableau I.3 compare les points forts et les points faibles des diffrentes approches
relatives au problme de la dtection d'obstacles.
Les approches
adoptes
Avantages Inconvnients
Lanalyse dune seule
image
- des algorithmes simples,
- traitement rapide,
- pas dinfluence du
mouvement du vhicule.
- perte dinformations
concernant la profondeur
des scnes si des
suppositions spcifiques nesont pas faites,
- naboutit pas si le
modle ne correspond pas.
Flux optique - dtection gnrique desobjets,
- permet le calcul du
dplacement et de la
vitesse relative des
obstacles.
- traitements complexes,
- sensible au mouvement du
vhicule et aux erreurs de
calibrage,
- naboutit pas si le vhicule
ou lobstacle a une vitesse
nulle.
28
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
31/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
La strovision - dtection gnrique desobjets,
- permet la reconstruction
3D.
- traitements complexes
(des contraintes
spcifiques peuvent
rduire la complexit),
- sensible au mouvement duvhicule et aux erreurs decalibrage.
Tableau I.3 : Comparaison entre les diffrentes approches de dtection dobstacles.
Comme mentionn ci-dessus, diffrentes techniques ont t proposes dans la littrature
et values sur des prototypes afin de rsoudre le problme du suivi de route, mais seulement
quelques-unes d'entre elles fournissent une solution intgre, (comme par exemple la
dtection des routes et la dtection d'obstacle) justifiant la poursuite de recherches destines
lamlioration des rsultats et la mise au point des traitements plus rapides et plus efficaces.
I.5. LES TENDANCES RELATIVES A LEVOLUTION DES
MATERIELS
Dans les premires annes des applications ITS un grand nombre de solutions ont t
proposes et beaucoup dentre elles taient bases sur des matriels spcialiss. Ce choix tait
justifi par le fait que le matriel disponible sur le march un prix raisonnable n'tait pas
assez puissant pour pouvoir traiter les images en temps rel. Par exemple, les chercheurs de
l'Universitt Der Bundeswehr [Dic.95, Joc.93b, Joc.98, Bro.97] ont dvelopp leur propre
architecture du systme.
En plus du choix des capteurs appropris et du dveloppement des algorithmes
spcifiques, un grand pourcentage de cette premire tape de recherche tait consacr la
conception, la mise en oeuvre et aux essais des nouvelles plates-formes matrielles. En fait,
quand une nouvelle architecture d'ordinateur fait son apparition, il faut prendre en
considration non seulement le matriel et les aspects architecturaux (tel que le jeu
d'instructions, les intercommunications, les Entres / Sortie, etc.) mais aussi les solutions
logicielles applicables.
Ces dernires annes, l'volution technologique a tout chang: presque tous les groupes
de recherche utilisent des composants directement disponibles sur le march pour leurs
systmes.
Par exemple, le NavLab 5 (vhicule du Carnegie Mellon University) et ARGO (le
vhicule de Di Parma Universit) ont utilis des systmes bass sur des processeurs
universels. Grce la disponibilit des rseaux ultra-rapides, quelques solutions MIMD24ont
24MIMD: Multiple Instruction Multiple Data.
29
-
7/25/2019 Vehicules Intelligents Etude et developpement d'un capteur intelligent de vision
32/226
Chapitre 1 Les vhicules Intelligents : Etat de lart
mme t explores. Ces dernires sont composes dun petit nombre de processeurs
performants et interconnects, comme dans le cas du vhicule VaMoRs-P [Lt.98] de
l'Universitt der Bundeswehr o lancien systme a t remplac par trois PCs (dual Pentium
II) connects viaun rseau rapide bas sur Ethernet.
Les tendances actuelles [Ber.00], cependant, semblent converger vers une architecture
hybride, dans laquelle le processeur universel puissant est p