Vectors and 2-Dimensional Motion Projectiles Relative velocity · What makes things tractable is...
38
Vectors and 2-Dimensional Motion Projectiles Relative velocity
Transcript of Vectors and 2-Dimensional Motion Projectiles Relative velocity · What makes things tractable is...

Vectors and 2-Dimensional Motion
Projectiles
Relative velocity

in 1-dimension
Displacement f ir r r∆ = −
averagevelocity
f iave
r r rvt t
∆ −= =∆ ∆
instantaneousvelocity
f it 0 t 0
r r rv lim limt t∆ → ∆ →
∆ −= =
∆ ∆
averageacceleration
f iave
v v vat t
∆ −= =∆ ∆
instantaneousacceleration
f it 0 t 0
v v va lim limt t∆ → ∆ →
∆ −= =
∆ ∆
in 2-dimensions
f ir r r∆ = −
f it 0 t 0
r r rv lim limt t∆ → ∆ →
∆ −= =
∆ ∆
f it 0 t 0
v v va lim limt t∆ → ∆ →
∆ −= =
∆ ∆
f iave
r r rvt t
∆ −= =∆ ∆
f iave
v v vat t
∆ −= =∆ ∆
Kinematic variables(need vectors)
Position r r

In 1-D: an object goes from to in time .
ir fr
ir fr t∆
Is the object’s displacement positive or negative for the case drawn?
values negativethis side of originr values positive
this side of originr
r 0=
Hitt

In 1-D: an object goes from to in time .
ir fr
r 0=
ir fr t∆
Is the object’s displacement positive or negative for the case drawn?
f ir r r∆ = −Displacement:
r ( 3) ( 8) 5∆ = − − − = +
Try arbitrary values consistent with figure, e.g.
So positive this caser∆
(despite both r’s being negative)
values negativethis side of originr values positive
this side of originr

Treat as vectors: the object goes from to in time .ir
fr
t∆
Is the displacement vector positive or negative for the case drawn?
ir
fr r 0=
values negativethis side of originr values positive
this side of originr

The object goes from to in time .ir
fr
t∆
Is the displacement vector positive or negative for the case drawn?ir
fr
f i f ir r r r ( r )∆ = − = + −
2 ways to get answer:
ir
fr
The displacement vector goes from the head of the initial position vectorto the head of the final position vector
ir
fr
ir−
fr
Or by geometric vector addition
In either case points toward increasingso here is positive.
r∆
r∆
r∆ rr∆
values positivethis side of originrr 0=r∆

The object goes from to in time .ir
fr
t∆
Is the velocity vector positive or negative for the case drawn?
ir
fr r 0=
values negativethis side of originr values positive
this side of originr

The object goes from to in time .ir
fr
t∆
Is the velocity vector positive or negative for the case drawn?
ir
fr r 0=
2 ways:Common sense: to get from to the object must move in thedirection of . Since that is in the direction of increasing r thevelocity vector here is positive.
fr
fr
ir
More formally: f iave
r rrvt t
−∆= =∆ ∆
here positivealways positive
= positive
values negativethis side of originr values positive
this side of originr
v
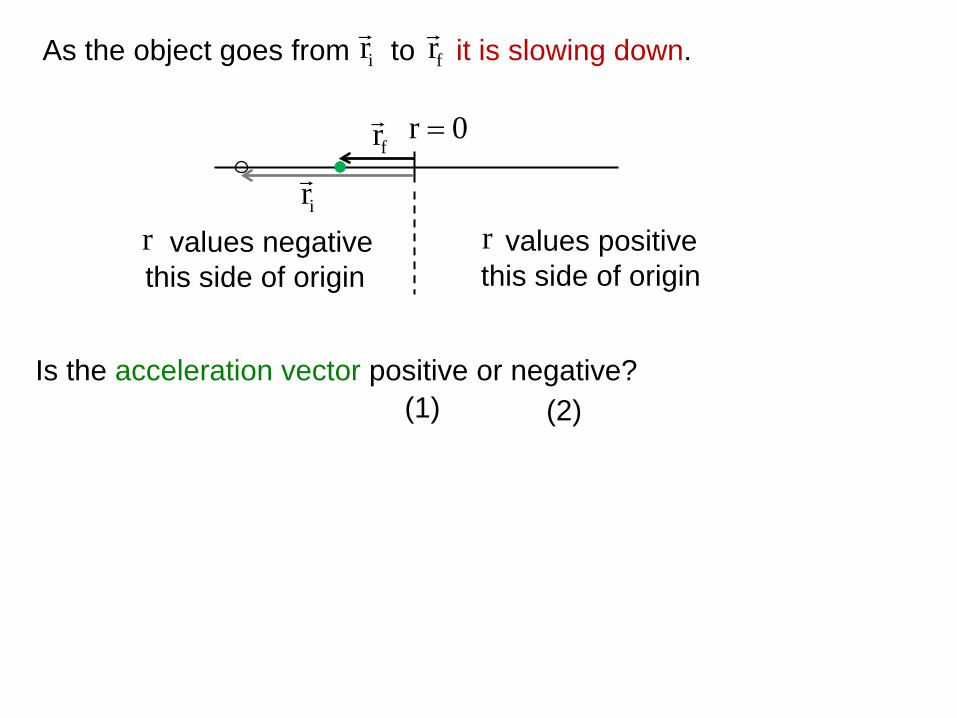
As the object goes from to it is slowing down.ir
fr
Is the acceleration vector positive or negative?(1) (2)
ir
fr r 0=
values negativethis side of originr values positive
this side of originr

As the object goes from to it is slowing down.ir
fr
Is the acceleration vector positive or negative?(1) (2)
ir
fr r 0=
f iave
v v vat t
∆ −= =∆ ∆
The velocity vectors at and are both positive but has thesmaller magnitude (slowing). Then since:
fviv fv
and is always positive goes like which here is negative.aveat∆ f iv v−
values negativethis side of originr values positive
this side of originr
a iv
fv

Sign rules (1-D vectors)
Position vector :negative on negative side of origin, positive otherwise. r
Displacement vector :in the direction of the motionnegative if pointing towards , positive otherwise.
r∆
−∞
(quantities below do not dependent on the side of the origin)
Velocity vector :in the direction of the motion, same sign as ,negative if pointing towards , positive otherwise.
v
−∞r∆
Acceleration vector :in the direction of the velocity when speeding up opposite direction of the velocity when slowing down.
a

For a ball thrown upwards (over a well)
1r+∆
ov+
2r+∆
3r+∆
1v+2v+
7r−∆
6r−∆
4r−∆
7v−
4v−
or+
1r+
2r+
3r+
4r+
6r+
5r+
7r−
5r−∆
g−
slowing
g−g−
5v−g−
speeding
upg−
g−
g−
6v−
g−
3v 0=position displacement
r 0=
velocity & acceleration

In two dimensions
X
Y
ir
fr
r∆ object slowing in going from toir
fr
X
Y
ir
fr
But including changes in direction seems to make things monstrously complex.
vaStraight line motionis tractable r
rv
a

What makes things tractable is the vector formalism that allows resolution of the motion into two perpendicular directions (along the two coordinate axes) so that the motion can then be treated as two (coupled) one dimensional problems.
shore
20o
X
Y
Vx
Vy
vx
vy
We did this last classfor the simple boat problem when we resolved the boats velocity vector into its velocity components along the X and Y directions.
We now include thepossibility of acceleration.

In 1-D kinematics you saw that for constant acceleration
21o o 2x x v t at= + + ov v at= +
It can similarly be shown that in 2 dimensions,
21o o 2r r v t at= + +
ov v at= +
Where now each of these vector equations is really 2 equations, one for the components along each coordinate direction:
21x xo xo x2r r v t a t= + +
21y yo yo y2r r v t a t= + +
x xo xv v a t= +
y yo yv v a t= +
x:
y:
Also, in 1-D you saw the expression,
( )2 2o ov v 2a x x= + −
In 2-D this becomes the 2 separate equations,
( )2 2x xo x x xov v 2a r r= + −
( )2 2y yo y y yov v 2a r r= + −
These and the foregoing equations will let us handle (predict)
x:
y:
Projectile Motion.

Digression - Chapt. 4 preview
Force acceleration (Law of nature)
Both are vector quantities
If a net force acts on an object that net force has a direction
The object will accordingly acceleratein that direction
a F∝
Mathematically, as a vector relationship
(we’ll see what the proportionality constant is later)
⇔

Since the constant force causes a constant acceleration
E.g. in free space (no gravity)
F
x
y
z
object will accelerate along direction. Xif:
a F∝
a
Projectile simulation

In projectile motion an object is launched, with some initial velocity(i.e. speed in a particular direction).
To simplify we assume that no force other than gravity acts(after the launch) i.e. no air resistance.
Importantly this means that if we align our coordinate axes so thatthe force of gravity lies along one of the axes, e.g. the y axis, then acceleration of the projectile only occurs along that direction.
Since no forces act along the other axes, the velocity alongthe x and z axes is constant.
By rotating our coordinate system to make all the initial velocityin say the x, y plane, we simplify further in that the z componentdrops out of the problem (without an initial velocity along the z direction and no acceleration along that direction the z componentof the object remains zero throughout the trajectory).

v
Since there is no accelerationin the x direction the x component of the velocity is the same throughout the trajectory (vx = vxo has thesame value throughoutthe trajectory).
vx
vy
Due to the forceof gravity in the -y direction thereis acceleration
(down) causing , a g= −
initially pointing upwardsto shrink to zero at thetop of the trajectory andthen grow again in theopposite direction.
vy
vxo
θοvyo
Ova g= −

v
vx
vy
Since the magnitude of the objects vector velocity is
2 2x yv v v v= = +
This vector initially shrinks asand then grows
again. yv 0→
entirely
x xov v=at the top of the trajectory
vxo
θοvyo
Ova g= −

Now consider the trajectory.
The general expression for the position along the x direction is, 21
x xo xo x2r r v t a t= + +
but the launch occurs from rx = 0 and with no force along x, ax = 0so this reduces to,
x xor v t=

For the y direction, 21
y yo yo y2r r v t a t= + +
but the launch occurs from ry = 0 and so we have,ya g= −
21y yo 2r v t gt= − & x xor v t=
Since rx is proportional to time, the trajectory reflects the quadratic ry dependence as an inverted parabola (trajectory is parabolic).
y: x:

vxo
θοvyo
Ova g= −
To be definitive consider the case in which the magnitude of the the initial velocity is vo = 35 m/s and the launch angle is θo = 65o. We ask for the distance travelled along x when the projectile is atit’s maximum height.
If we find the time taken for the projectile to reach it’s maximum height we can then plug that into the rx = vxot equation to get thedesired x distance travelled. For the time need to get to the max height use,
y yo yv v a t= +
y yov v gt= −
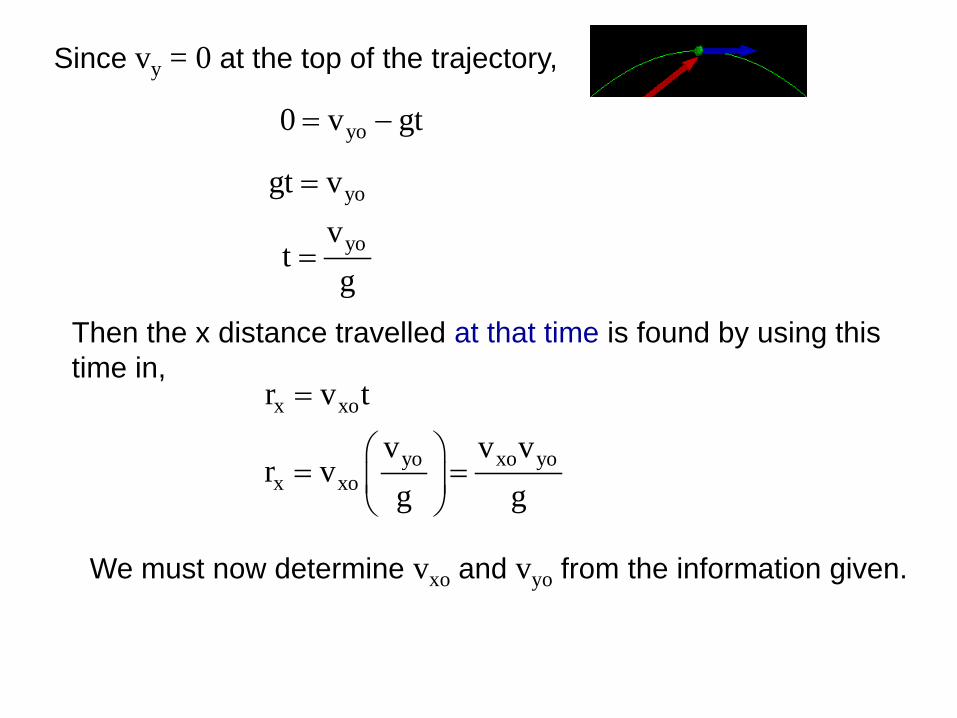
Since vy = 0 at the top of the trajectory,
yo0 v gt= −
yogt v=
yovt
g=
Then the x distance travelled at that time is found by using this time in,
x xor v t=
yo xo yox xo
v v vr v
g g
= =
We must now determine vxo and vyo from the information given.

vxo
θοvyo
Ov
ˆa gj= −
Resolving into itsx and y components,
vox = vocosθo
voy = vosinθo
So,
xo yo o o o ox
v v (v cos )(v sin )rg g
θ θ= =
22
o oox o o
2
m(35 )v sr cos sin cos(65 )sin(65 )mg 9.8s
= θ θ =
xr 48 m=
ov

What is the maximum height reached by the projectile?
Since, ( )2 2y yo y y yov v 2a r r= + −
( )2yo y max0 v 2g r 0= − −
2y max yo2gr v=
( )2
o22
yo oy max
2
m35 sin65v v sin sr m2g 2g 2(9.8 )s
θ = = =
y maxr 51 m=
we can use in this vy = 0 at top of the trajectory where ry = rymax and ryo = 0 (since starts from origin). Then:

What is the total horizontal distance travelled by the projectilefrom the launch until it hits level ground again?
Since the trajectory is an inverted parabola it is symmetric aboutthe top of the trajectory. For the x distance until it gets to the topwe found (generally),
o o o ox
(v cos )(v sin )rg
θ θ=
Then by symmetry the total horizontal distance travelled will be twice this or,
2o
x total o ovr 2 (cos )(sin )g
= θ θ
This distance is called the “range” and this expression the “rangeequation”. Caution: only valid when the launch & landing are at the same level (height).
Which here is, 2(48m) 96m=

Indeed for any particular height the speeds are equal on the wayup and down.
vxo
θοvyo
Ova g= −
y yov v= −
x xov v=
Also by symmetry we canmake the observationsthat:
Half the time in the air is spent going up and the other half coming down.
The speed at the landing equals the speed at the launch
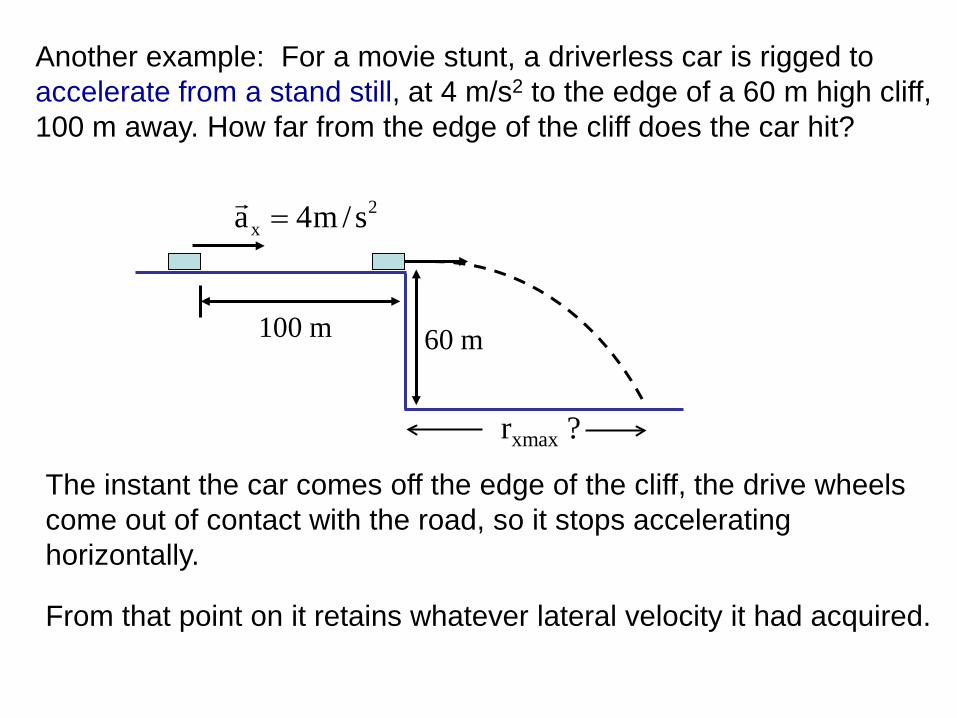
Another example: For a movie stunt, a driverless car is rigged to accelerate from a stand still, at 4 m/s2 to the edge of a 60 m high cliff, 100 m away. How far from the edge of the cliff does the car hit?
100 m 60 m
The instant the car comes off the edge of the cliff, the drive wheels come out of contact with the road, so it stops accelerating horizontally.
From that point on it retains whatever lateral velocity it had acquired.
2xa 4m /s=
rxmax ?

100 m 60 m
2xa 4.0m /s=
That velocity is obtained by applying the expression,
2 2x xo x x xov v 2a (r r )= + −
2 2xv 0 2(4m /s )(100m)= + xv 28.3 m /s= rxmax ?
x xo xor r v t= +
xr 0 (28.3 m /s)t 0= + +
xr (28.3 m /s)t= but we don’t know the time, t when it hits the ground.
This is now the horizontal velocity retained throughout the rest of thecar’s motion independent of what it does along the vertical axis.
To find the distance it goes we have,

To find t, we solve for the time taken to fall using,
21y yo yo 2r r v t gt= + −
2 2120 60m 0 t (9.8m / s )t= + ⋅ − t 3.5 s=
Then,
x maxr (28.3 m /s)t (28.3 m /s)(3.5 s) 99 m= = =

Relative velocity
There are times when it is useful to define a coordinate system (a frame of reference) that moves with constant velocity.
For example consider a airplane pilot flying by instruments at night (with no GPS).
All the pilot can know from the instruments is the plane’s airspeed(i.e. the speed that the plane has relative to the air around it), andthe bearing (i.e. the orientation of the plane with respect to thepoints of the compass).
The plane is moving though the air that surrounds it, but that airitself will generally be moving in some direction relative to the earth as a wind. Where does the plane end up?
Vectors will again help us address these kind of problems.
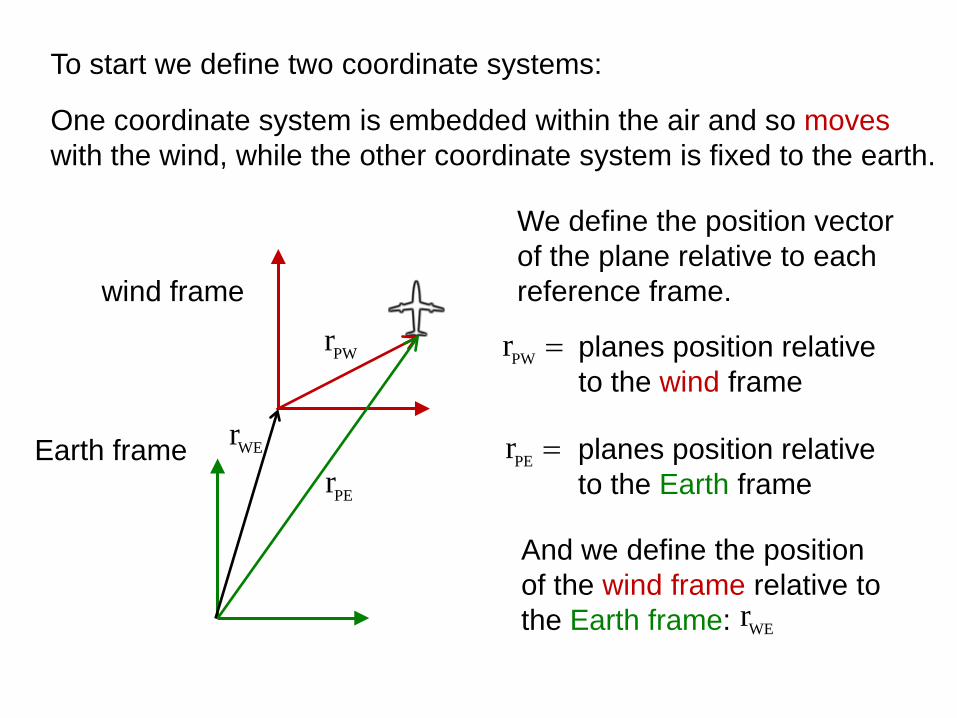
To start we define two coordinate systems:
One coordinate system is embedded within the air and so moves with the wind, while the other coordinate system is fixed to the earth.
wind frame
Earth frame
We define the position vectorof the plane relative to eachreference frame.
PWr
PErWEr
PWr = planes position relativeto the wind frame
PEr = planes position relativeto the Earth frame
And we define the positionof the wind frame relative tothe Earth frame: WEr

Now by our rules of geometric vector addition we clearly havethat,
wind frame
Earth frame
It can be shown that this relationalso holds for the correspondingvelocity vectors so we can write that:
WE PW PEr r r+ =
WE PW PEv v v+ =
where:
WEv =
velocity of the windrelative to the Earth
PWv =
velocity of the planerelative to the wind
PEv =
velocity of the planerelative to the Earth
PWr
PErWEr

Suppose now that you are the pilot flying by your instrumentsand your compass says that you are aimed due North with an air speed of 300 km/hr.
Then this is your velocity vector in the reference frame of thewind i.e.:
Suppose that the velocity of the wind (in the reference frame of theEarth) is 50 km/hr due East. Then
300 km/hrdue North
PWv =
300 km/hrdue North
PWv =
WEv =
50 km/hr due East

300 km/hrdue North
PWv =
WEv =
50 km/hr due East
Then since,
WE PW PW WE PEv v v v v+ = + =
We must have that,
300 km/hrdue North
PWv =
WEv =
50 km/hr due East
PEv
So relative to the Earth the planes speed (magnitude of ) is, PEv
2 2PEv (300 km / hr) (50 km / hr) 304 km/hr= + =

300 km/hrdue North
PWv =
PEv
WEv =
50 km/hr due East
PEv 304 km/hr=
1 o50tan 9.5300
− θ = =
And while the plane is headed due North relative to the wind,relative to the Earth it is headed 9.5o East of North.
If its destination was 300 km North of its initial position, afteran hour’s flight time it will be 50 km to the East of its target!