
Vector in 2-Space and 3-Space
62
Vectors in 2-Space and 3-Space
-
Upload
abi-rafdi-insani -
Category
Documents
-
view
222 -
download
2
Transcript of Vector in 2-Space and 3-Space

Vectors in 2-Space and 3-Space

Chapter Contents
Introduction to Vectors (Geometric)Norm of a Vector; Vector ArithmeticDot Product; ProjectionsCross ProductLines and Planes in 3-Space
1 Introduction to Vectors (Geometric)

Geometric VectorsSymbolically, we shall denote vectors in lowercase boldface type. All our scalars will be real numbers and will be denoted in lowercase italic type
initial point
terminal point • The vector of length zero is called the zero vector and is denoted by 0.
• Since there is no natural direction for the zero vector
• the negative of v, is defined to be the vector having the same magnitude as v, but oppositely directed.

DefinitionIf v and w are any two vectors, then the sum v+wis the vector determined as follows: Position the vector w so that its initial point coincides with the terminal point of v. The vector v+wis represented by the arrow from the initial point of v to the terminal point of w.

Definition
If v and w are any two vectors, then thedifference of w from v is defined by
v – w = v + (-w)

DefinitionIf v is a nonzero vector and k is nonzero real number (scalar), then the product kvis defined to be the vector whose length is |k| times the length of v and whose direction is the same as that of v if k > 0 and opposite to that of v if k < 0. We define kv =0 if k = 0 or v = 0.
A vector of the form kv is called a scalar multiple.

Vectors in coordinate Systems(1/2)
In Figure 3.1.6, that v has been positioned so its initial point is at the origin of a rectangular coordinate system. The coordinates of the terminal point of v are called the components ofv, and we write
),( 21 vvv =
21,vv

Vectors in coordinate Systems(2/2)
If two vectors are equivalent if and only ifand
),( and ),( 2121 wwwvvv ==
2211 and wvwv ==

Vectors in 3-Space (1/4)
rectangular coordinate system
origin
coordinate axes• Each pair of coordinate
axes determines a plane called a coordinate plane. These are referred to as the xy-plane, the xz-plane, and the yz-plane.
• To each point P in 3-space we assign a triple of numbers (x, y, z), called the coordinates of P.

Vectors in 3-Space (2/4)
Rectangular coordinate systems in 3-space fall into two categories, left-handed and right-handed.In this book we shall use only right-handed coordinate systems.

Vectors in 3-Space (3/4)A vector v in 3-space is positioned so its initial point is at the origin of a rectangular coordinate system. The coordinates of the terminal point of v are called the components of v, and we write ),,( 321 vvvv =
),,( and ),,( 321321 wwwwvvvv ==If are two vectors in 3-space, then
scalarany is where),,,(),,(
,, vifonly and if equivalent are and
321
332211
332211
kkvkvkvkvwvwvwvwv
wvwvwwv
=+++=+
===

Vectors in 3-Space (4/4)
),(
is )( point terminaland )(point initialth vector wi thespace-2In
),,(),,(),,(
then ,),,(point terminaland ),,(point initial has vector theIf
origin. at thenot ispoint initial its that so positioned is vector a Sometimes
121221
111
111
12121211122221
2222
111121
yyxxPP
yxPyxP
zzyyxxzyxzyxPP
zyxPzyxPPP
−−=
−−−=−=
=

Example 1Vector Computations with Components
If v=(1,-3,2) and w=(4,2,1),then
v + w=(5,-1,3), 2v=(2,-6,4) -w=(-4,-2,-1),v – w=v + (-w)=(-3,-5,1)

Example 2Finding the components of a Vector
)12,6,5()4)8(),1(5,27( are )8,5,7(point terminaland
)4,1,2(point initial with vector theof components The
2
121
−=−−−−−=−
−==
vP
PPPv

Translation of AxesIn Figure 3.1.14a we have translated the axes of an xy-coordinate system to obtain an x’y’-coordinate system whose O’ is at point (x ,y)=(k ,l ).
A point P in 2-space now has both (x ,y) coordinates and (x’ ,y’) coordinates.
x’= x – k , y’= y – l , these formulas are called the translation equations.
In 3-space the translation equations are x’= x – k , y’= y – l , z’= z – m where ( k, l, m ) are the xyz-coordinates of the x’y’z’-origin.

Example 3Using the Translation Equations (1/2)
Suppose that an xy-coordinate system is translated to obtain an x’y’-coordante system whose origin has xy-coordinates (k ,l )=(4,1).
(a) Find the x’y’-coordinate of the point with the xy-coordinates P(2,0)
(b) Find the xy-coordinate of the point with the x’y’-coordinates Q(-1,5)

Solution (a). The translation equations arex’=x-4, y’=y-1
so the x’y’-coordinate of P(2,0) are x’=2-4=-2 and y’=0-1=-1.Solution (b). The translation equations in (a) can be written as
x=x’+4, y=y’+1so the xy-coordinate of Q are x=-1+4=3 and y=5+1=6.
Example 3Using the Translation Equations (2/2)

2 Norm of a Vector; Vector Arithmetic

Theorem 2.1Properties of Vector Arithmetic
If u, v and w are vectors in 2- or 3-space and k and l are scalars, then the following relationship

Norm of a Vector (1/2)The length of a vector u is often called the norm of u and is denoted by .
Figure (a): it follows from the Theorem of Pythagoras that the norm of a vector
in 2-space is
Figure (b): Let be a vector in 3-space.
A vector of norm 1 is called a unit vector.
u
),( 21 uuu = 22
21 uuu +=
23
22
21 uuuu ++=
),,( 321 uuuu =

Norm of a Vector (2/2)If are two points in 3-space, then the distance s between them is the norm of vector
Similarly in 2-space:
the length of the vector ku :
),,( and ),,( 22221111 zyxPzyxP =
),,(
12121221
21
zzyyxxPP
PP
−−−=
ukku =

Example 1Finding Norm and Distance
11244)51()13()24(
is )1,3,4(P and (2,-1,5)P points ebetwwen th d distance The14)1()2()3(u
is)(-3,2,1uvector theof norm The
222
21
222
==+++−+−=
−=
=++−=
=
d

3 Dot Product; Projections

The Angle Between Vectors
� Let u and v be two nonzero vectors in 2-space or 3-space, and assume these vectors have been positioned so their initial points coincided. By the angle between u and v, we shall mean the angleθ determined by u and v that satisfies 0 ≤ θ ≤ π.

Definition

Example 1Dot Product

Component Form of the Dot Product (1/2)
)( or
)( cos
as (2) rewritecan we, Since
(2) cos 2-
yields cosines of law then the
v,andu between angle theis 3.3.3, figurein shown as If
vectors.nonzero twobe ),,( and ),,(Let
222
21
222
21
222
321321
uvvuvu
uvvuvu
uvPQ
vuvuPQ
vvvvuuuu
−−+=⋅
−−+=θ
−=
θ+=
θ
==

Component Form of the Dot Product (2/2)
2211
332211
233
222
211
2
23
22
21
223
22
21
2
: space-2in Similarly
Simplfyingafter obtain we
)()()( and
,
ngSubstituti
vuvuvu
vuvuvuvu
uvuvuvuv
vvvvuuuu
+=⋅
++=⋅
−+−+−=−
++=++=
� The formula is also valid if u=0 or v=0.

Finding the Angle Between Vectors
� If u and v are nonzero vectors then
it also can be written as
vu
vu
vuvu
cos
(1) cos
⋅=θ
θ=⋅

Example 2Dot Product Using [3]

Example 3A Geometric Problem

Theorem 3.1

Example 4Finding Dot products from Components

Orthogonal Vectors
� Perpendicular vectors are also calledorthogonal vectors.
� In light of Theorem 3.l.1b, two nonzerovectors are orthogonal if and only iftheir dot product is zero.
� To indicate that u and v are orthogonalvectors we write u v.

Example 5A Vector Perpendicular to a Line� Show that in 2-space the nonzero vector n=(a,b) is
perpendicular to the line ax+by+cz=0.
� Solution
lar.perpendicu are and Thus,
0or 0),(),(
form in the expressed becan which
0)()(
obtain we(6)in equations the
gsubtractinon But lar.perpendicu are andn that showonly need we
3.3.5), (Figure line thealong runs ),( vector theSince
(6) 0
0
thatso line, on the pointsdistinct be ),( and ),(Let
21
211212
1212
21
121221
22
11
222111
PPn
PPnyyxxba
yybxxa
PP
yyxxPP
cbyax
cbyax
yxPyxP
=⋅=−−⋅
=−+−
−−=
=++
=++

Theorem 3.2Properties of the Dot Product
If u, v and w are vectors in 2- or 3-space and k is a scalar, then:

An Orthogonal Projection (1/2)
� To "decompose" a vector u into a sum of two terms, one parallel to a specified nonzero vectora and the other perpendicular to a.
� Figure 3.3.6: Drop a perpendicular from the tip of u to the line through a, and construct the vector w1 from Q.
� Next form the difference: uwuwwwwuw =−+=+−= )( then 112112

An Orthogonal Projection (2/2)
� The vector w1 is called the orthogonal projection of u on a or sometimes the vector component of u along a. It is denoted by
� The vector w1 is called the vector component of u orthogonal to a. Since we have , this vector can be written in notation (7) as
(7) uproja
uprojuw a 2 −=
12 wuw −=

Theorem 3.3
An Orthogonal Projection (cont)
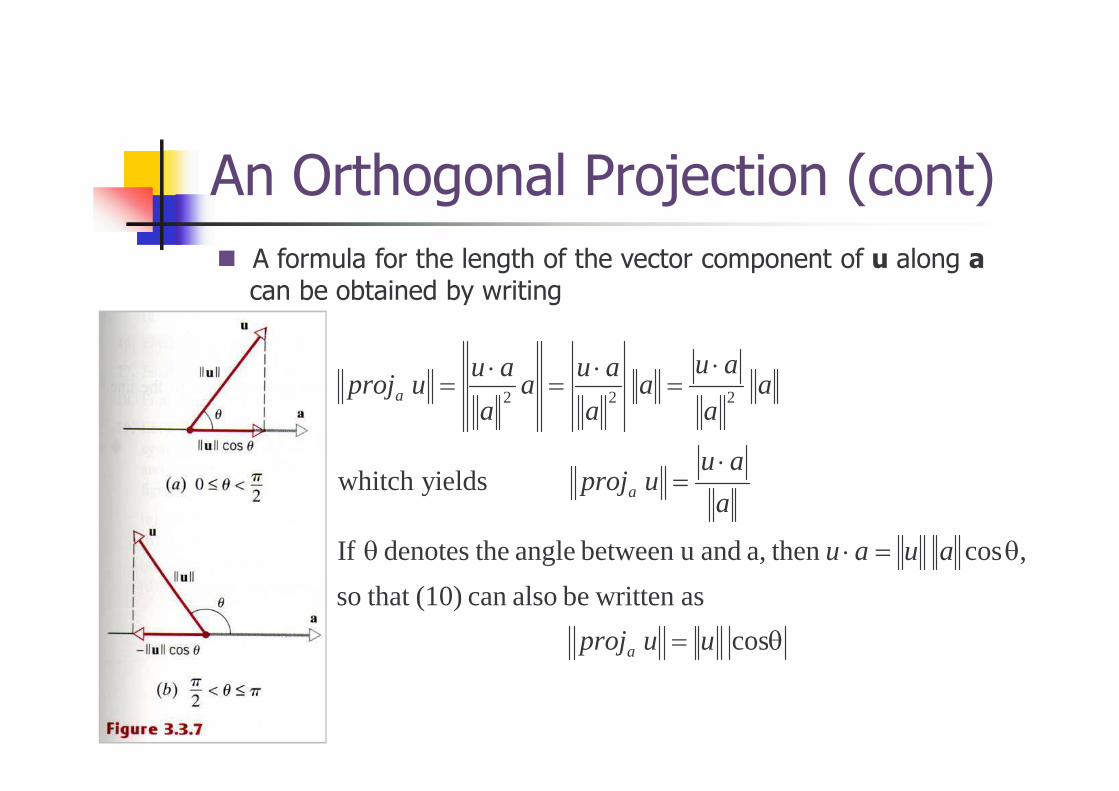
θ=
θ=⋅θ
⋅=
⋅=
⋅=
⋅=
cos
as written be alsocan (10) that so
,cos then a, andu between angle thedenotes If
yieldswhitch
222
uuproj
auau
a
auuproj
aa
aua
a
aua
a
auuproj
a
a
a
� A formula for the length of the vector component of u along acan be obtained by writing
Example 6Vector Component of u Along a
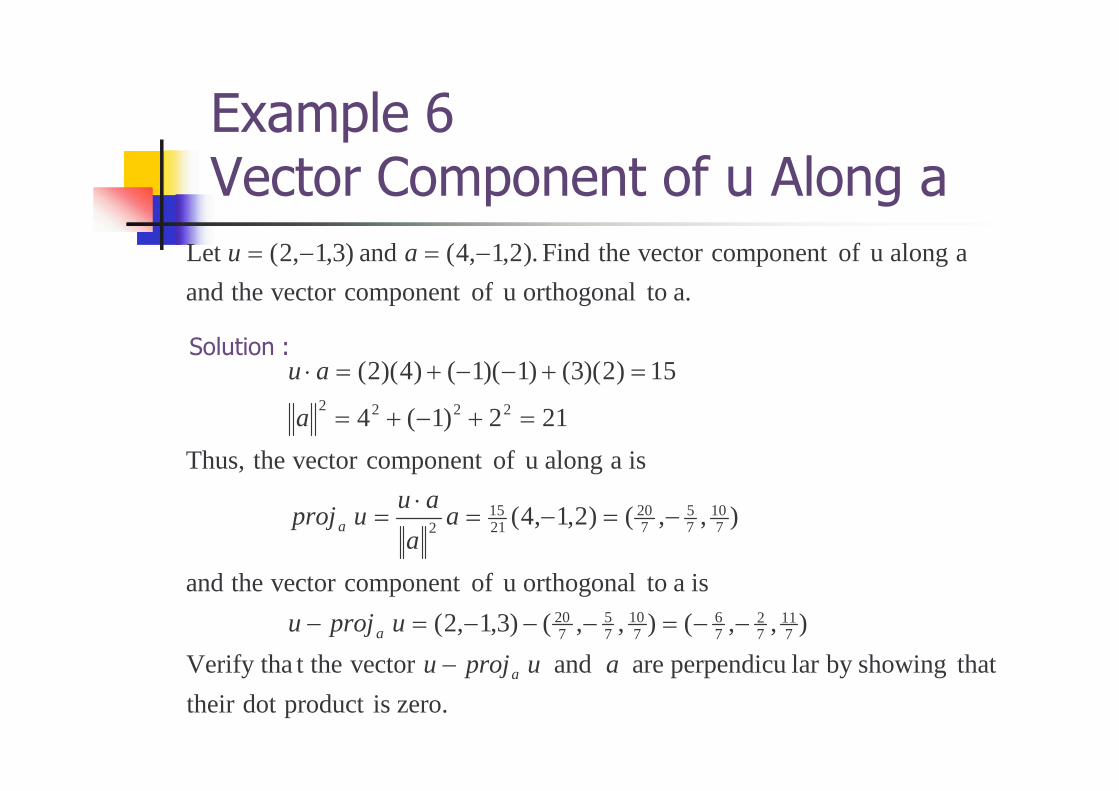
zero. isproduct dot their
that showingby lar perpendicu are and vector t theVerify tha
),,(),,()3,1,2(
is a toorthogonalu ofcomponent vector theand
),,()2,1,4(
is a alongu ofcomponent vector theThus,
212)1(4
15)2)(3()1)(1()4)(2(
a. toorthogonalu ofcomponent vector theand
a alongu ofcomponent vector theFind .)2,1,4( and )3,1,2(Let
711
72
76
710
75
720
710
75
720
2115
2
2222
auproju
uproju
aa
auuproj
a
au
au
a
a
a
−
−−=−−−=−
−=−=⋅
=
=+−+=
=+−−+=⋅
−=−=
Solution :

Example 7Distance Between a Point and a Line (1/2)
221010010100
0
0
0
11
000
n ),()( ),,( But
thus,n;on QP of projection
orthogonal theoflength the toequal is D distance thefigure, in the indicated As
3.3.8). (Fig line thelar toperpendicu isn vector theExample5, of By virtue
.at ispoint
initial its that so ),(n vector heposition t and line on thepoint any be ),(Let
.0 line theand ),(Ppoint between D distance for the formula a Find
bayybxxanQPyyxxQP
n
nQPQPprojD
Q
bayxQ
cbyaxyx
n
+=−+−=⋅−−=
⋅
==
=
=++
Solution :

Example 7Distance Between a Point and a Line (2/2)
(13)
formula theyields (12)in expression thisngSubstituti
or 0
so line, theofequation the
satisfy scoordinate its line, on the lies )y,(point theSince
(12) )()(
that so
22
00
1111
11
22
1010
ba
cbyaxD
byaxccbyax
xQba
yybxxaD
+
++=
−−==++
+
−+−=
Solution (count)
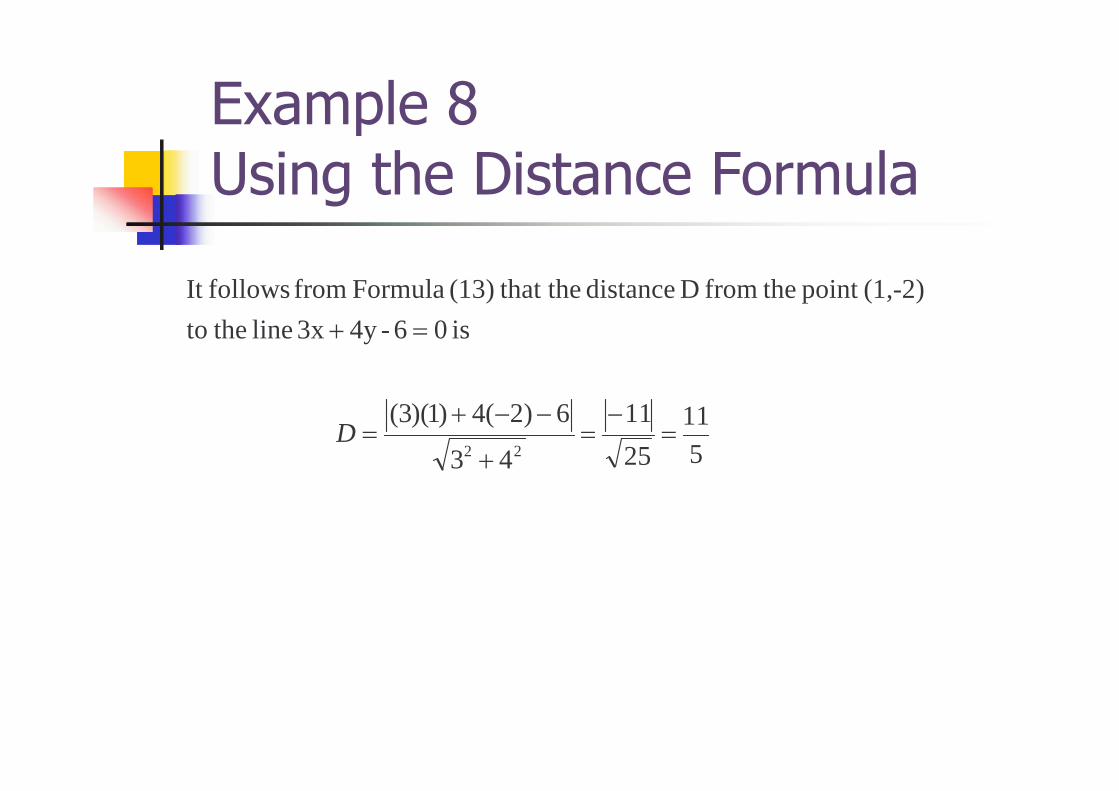
Example 8Using the Distance Formula
5
11
25
11
43
6)2(4)1)(3(
is 06-4y3x line theto
(1,-2)point thefrom D distance that the(13) Formula from followsIt
22=
−=
+
−−+=
=+
D

4 Cross Product

Cross Product of Vectors
� Recall from Section 3 that the dot product of two vectors in 2-space or 3-space produces a scalar.
� We will now define a type of vector multiplication that produces a vector as the product, but which is applicable only in 3-space.

Definition

Example 1Calculating a Cross Product

Theorem 4.1Relationships Involving Cross Product and Dot Product

Example 2u v Is Perpendicular to u and to v

Theorem 4.2Properties of Cross Product

Example 3Standard Unit Vectors

Example 3Standard Unit Vectors (count)
� Obtaining the following results:
i i = 0 j j = 0 k k = 0i j = k j k = i k i = jj i = -k k j = -i i k = -j
� Figure 3.4.2 is helpful for remembering these results.Referring to this diagram, the cross product of two consecutive vectors going clockwise is the next vector around, and the cross product of two consecutive vectors going counterclockwise is the negative of the next vector around.
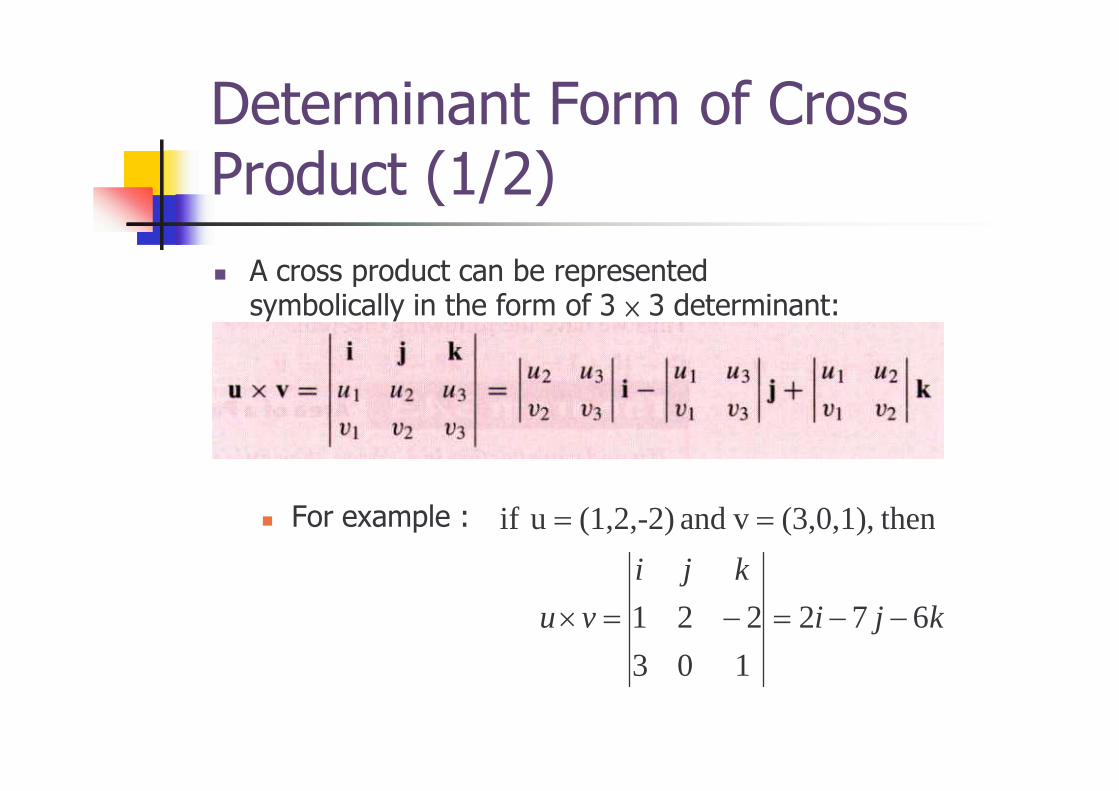
Determinant Form of Cross Product (1/2)
� A cross product can be represented symbolically in the form of 3 3 determinant:
� For example :
kji
kji
vu 672
103
221
then(3,0,1), vand (1,2,-2)u if
−−=−=×
==

Determinant Form of Cross Product (2/2)
� Warning: It is not true in general that
u (v w) = (u v) w
� For example
i �
(j
�
j)= i
�0= 0
and (i
�
j)
�
j = k
�j= -i
so that i
�
(j
�j)
�(i
�j)
�j
� We known from Theorem 3.4.1 that u v is orthogonal to both u and v. If u and v are nonzero vectors, it can be shown that the direction of u v can be determined using the following right-hand rule.

Geometric Interpretation of Cross Product
� Lf u and v are vectors in 3-space, then the norm of ux v has a useful geometric interpretation. Lagrange's identity, given in Theorem 3.4.1, states that
θ=×
≥θπ≤θ≤
θ=θ−=
θ−=
⋅−=×
sin
so 0,sin that followsit ,0 since
sin)cos1(
cos
)(
222222
22222
2222
vuvu
vuvu
vuvu
vuvuvu
Theorem 4.3Area of a Parallelogram
u v 3- , u v
parallelogram
determined by u and v.
If and are vectors in space then
is equal to the area of the
×
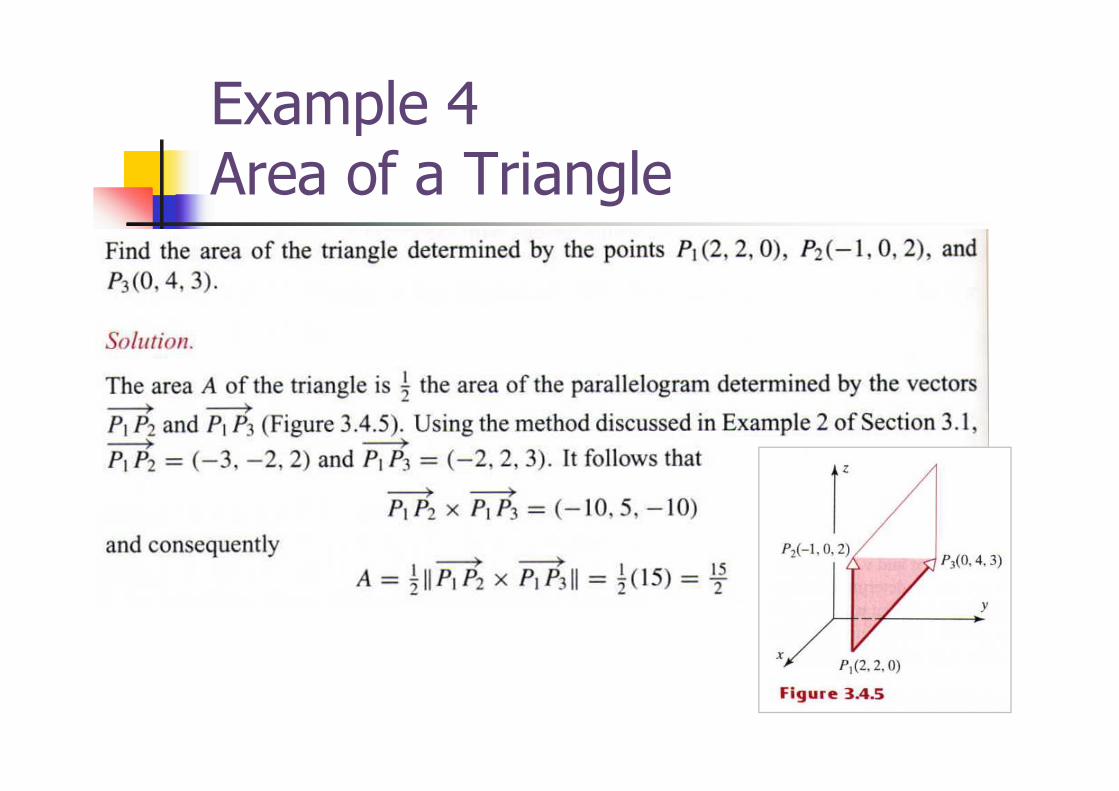
Example 4Area of a Triangle

Definition
(7)

Example 5Calculating a Scalar Triple Product (1/2)
Example 5Calculating a Scalar Triple Product (2/2)
� Note : The symbol (u � v) w make no sense since
we cannot form the cross product of a scale and a vector.
� It follows from (7) that
u � ( v w)= w · ( u v)= v · ( w u)
This relationship can be remembered by moving the vector u, v, and w clockwise around the vertices of the triangle in Figure 3.4.6.


















