Tutorials in Mathematical Biosciences 1 - Mathematical Neuroscience - Springer

Variational Principles in Mathematical
Physics, Geometry, and Economics
Qualitative Analysis of Nonlinear Equations and Unilateral
Problems
Alexandru Kristaly, Vicentiu D. Radulescu, Csaba Varga


Contents
Preface page vii
P A R T I: Variational Principles in Mathematical Physics 11 Variational Principles 2
1.1 Minimization techniques and Ekeland variationalprinciple 2
1.2 Borwein-Preiss variational principle 81.3 Minimax principles 12
1.3.1 Mountain pass type results 121.3.2 Minimax results via Ljusternik-Schnirelmann
category 151.4 Ricceri’s variational results 20
1.4.1 Three critical point results 201.4.2 A general variational principle 27
1.5 H1 versus C1 local minimizers 301.5.1 Application to sub and supersolutions 33
1.6 Szulkin type functionals 341.6.1 Minimax results of Szulkin type 351.6.2 Principle of symmetric criticality 37
1.7 Pohozaev’s fibering method 401.8 Historical comments 42
2 Variational Inequalities 442.1 Introduction 442.2 Variational inequalities on Ω = ω × Rl 44
2.2.1 Case l ≥ 2 452.2.2 Case l = 1 50
2.3 Area–type variational inequalities 58
iii

iv Contents
2.3.1 Statement of the problem 602.3.2 Area type functionals 692.3.3 A result of Clark type 762.3.4 A superlinear potential 79
2.4 Historical notes and comments 82
3 Nonlinear Eigenvalue Problems 833.1 Weighted Sobolev spaces 853.2 Eigenvalue problems 883.3 Superlinear case 963.4 Sublinear case 1083.5 Comments and further perspectives 119
4 Elliptic Systems of Gradient Type 1214.1 Introduction 1214.2 Formulation of the problems 1214.3 Systems with superlinear potential 1244.4 Systems with sublinear potential 1314.5 Shift solutions for gradient systems 1404.6 Comments and historical notes 151
5 Systems with Arbitrary Growth Nonlinearities 1525.1 Introduction 1525.2 Elliptic systems with oscillatory terms 1555.3 Elliptic systems with mountain pass geometry 1635.4 Comments and perspectives 170
6 Scalar Field Equations with Oscillatory Terms 1716.1 Introduction 1716.2 Multiple solutions of a double eigenvalue problem 1726.3 Scalar field systems with nonlinear oscillatory terms 1826.4 Applications 1886.5 Comments and historical notes 192
7 Competition Phenomena in Dirichlet Problems 1937.1 Introduction 1937.2 Effects of the competition 1947.3 A general location result 2007.4 Nonlinearities with oscillation near the origin 2037.5 Nonlinearities with oscillation at infinity 2097.6 Perturbation from symmetry 2167.7 Historical notes, comments 221

Contents v
8 Problems to Part I 223
P A R T II: Variational Principles in Geometry 2289 Sublinear Problems on Riemann Manifolds 229
9.1 Introduction 2299.2 Existence of two solutions 2309.3 Existence of many global minima 2379.4 Comments and perspectives 240
10 Critical Problems on Spheres 24110.1 Introduction 24110.2 Group-theoretical argument 24210.3 Arbitrarily small solutions 24810.4 Arbitrarily large solutions 25610.5 Historical notes, comments and perspectives 260
11 Equations with Critical Exponent 26311.1 Introduction 26311.2 Subcritical case 26811.3 Critical case 27011.4 Comments and historical notes 277
12 Problems to Part II 279
P A R T III: Variational Principles in Economics 28413 Mathematical Preliminaries 284
13.1 Metrics, geodesics, flag curvature 28413.2 Busemann-type inequalities on Finsler manifolds 28913.3 Variational inequalities 295
14 Minimization of Cost-functions on Manifolds 29714.1 Introduction 29714.2 A necessary condition 30014.3 Existence and uniqueness results 30114.4 Examples on the Finslerian-Poincare disc 30514.5 Comments and further perspectives 307
15 Best Approximation Problems on Manifolds 31015.1 Introduction 31015.2 Existence of projections 31115.3 Geometric properties of projections 31315.4 Geodesic convexity and Chebyshev sets 31615.5 Optimal connection of two submanifolds 320

vi Contents
15.6 Final remarks and perspectives 327
16 A Variational Approach of the Nash Equilibria 32816.1 Introduction 32816.2 Nash equilibria and variational inequalities 32916.3 Nash equilibria for set-valued maps 33216.4 Lack of convexity: a Riemannian approach 33816.5 Historical comments and perspectives 344
17 Problems to Part III 346
Appendices 349
Appendix A Elements of convex analysis 351A.1 Convex sets and convex functions 351A.2 Convex analysis in Banach spaces 356
Appendix B Function spaces 358B.1 Lebesgue spaces 358B.2 Sobolev spaces 359B.3 Compact embedding results 361B.4 Sobolev spaces on Riemann manifolds 364
Appendix C Category and genus 368
Appendix D Clarke and Degiovanni gradients 371D.1 Locally Lipschitz functionals 371D.2 Continuous or lower semi-continuous functionals 373
Appendix E Elements of set–valued analysis 379Bibliography 382Index 396

Preface
For since the fabric of theuniverse is most perfect andthe work of a most wiseCreator, nothing at all takesplace in the universe in whichsome rule of maximum orminimum does not appear.
Leonhard Euler (1707–1783)
The roots of the calculus of variations go back to the 17th century.Indeed, Johann Bernoulli raised as a challenge the “BrachistochroneProblem” in 1696. The same year, when he heard of this problem,Sir Isaac Newton found that he could not sleep until he had solvedit. Having done so, he published the solution anonymously. Bernoulli,however, knew at once that the author of the solution was Newton and,cf. [291], in a famous remark asserted that he “recognized the Lion bythe print of its paw”.
However, the modern calculus of variations appeared in the middle ofthe 19th century, as a basic tool in the qualitative analysis of modelsarising in physics. Indeed, it was Riemann who aroused great inter-est in them [problems of the calculus of variations] by proving manyinteresting results in function theory by assuming Dirichlet’s principle(Charles B. Morrey Jr., [219]). The characterization of phenomena bymeans of variational principles has been a cornerstone in the transitionfrom classical to contemporary physics. Since the middle part of thetwentieth century, the use of variational principles has developed intoa range of tools for the study of nonlinear partial differential equationsand many problems arising in applications. Cf. Ioffe and Tikhomirov[143], the term “variational principle” refers essentially to a group of re-
vii

viii Preface
sults showing that a lower semi-continuous, lower bounded function on acomplete metric space possesses arbitrarily small perturbations such thatthe perturbed function will have an absolute (and even strict) minimum.
This monograph is an original attempt to develop the modern theoryof the calculus of variations from the points of view of several disciplines.This theory is one of the twin pillars on which nonlinear functionalanalysis is built. The authors of this volume are fully aware of the limitedachievements of this volume as compared with the task of understandingthe force of variational principles in the description of many processesarising in various applications. Even though necessarily limited, theresults in this book benefit from many years of work by the authors andfrom interdisciplinary exchanges between them and other researchers inthis field.
One of the main objectives of this book is to let physicists, geometers,engineers, and economists know about some basic mathematical toolsfrom which they might benefit. We would also like to help mathemati-cians learn what applied calculus of variations is about, so that they canfocus their research on problems of real interest to physics, economics,engineering, as well as geometry or other fields of mathematics. Wehave tried to make the mathematical part accessible to the physicistand economist, and the physical part accessible to the mathematician,without sacrificing rigor in either case. The mathematical technicalitiesare kept to a minimum within the book, enabling the discussion to beunderstood by a broad audience. Each problem we develop in this bookhas its own difficulties. That is why we intend to develop some standardand appropriate methods that are useful and that can be extended toother problems. However, we do our best to restrict the prerequisitesto the essential knowledge. We define as few concepts as possible andgive only basic theorems that are useful for our topic. The authors usea first-principles approach, developing only the minimum backgroundnecessary to justify mathematical concepts and placing mathematicaldevelopments in context. The only prerequisite for this volume is a stan-dard graduate course in partial differential equations, drawing especiallyfrom linear elliptic equations to elementary variational methods, with aspecial emphasis on the maximum principle (weak and strong variants).This volume may be used for self-study by advanced graduate studentsand as a valuable reference for researchers in pure and applied mathe-matics and related fields. Nevertheless, both the presentation style andthe choice of the material make the present book accessible to all new-

Preface ix
comers to this modern research field which lies at the interface betweenpure and applied mathematics.
Each chapter gives full details of the mathematical proofs and sub-tleties. The book also contains many exercises, some included to clarifysimple points of exposition, others to introduce new ideas and tech-niques, and a few containing relatively deep mathematical results. Eachchapter concludes with historical notes. Five appendices illustrate somebasic mathematical tools applied in this book: elements of convex anal-ysis, function spaces, category and genus, Clarke and Degiovanni gradi-ents, and elements of set–valued analysis. These auxiliary chapters dealwith some analytical methods used in this volume, but also include somecomplements. This unique presentation should ensure a volume of inter-est to mathematicians, engineers, economists, and physicists. Althoughthe text is geared toward graduate students at a variety of levels, manyof the book’s applications will be of interest even to experts in the field.
We are very grateful to Diana Gillooly, Editor for Mathematics, forher efficient and enthusiastic help, as well as for numerous suggestionsrelated to previous versions of this book. Our special thanks go alsoto Clare Dennison, Assistant Editor for Mathematics and ComputerScience, and to the other members of the editorial technical staff ofCambridge University Press for the excellent quality of their work.
Our vision throughout this volume is closely inspired by the follow-ing prophetic words of Henri Poincare on the role of partial differentialequations in the development of other fields of mathematics and in appli-cations: A wide variety of physically significant problems arising in verydifferent areas (such as electricity, hydrodynamics, heat, magnetism, op-tics, elasticity, etc...) have a family resemblance and should be treatedby common methods. (Henri Poincare, [245]).
Alexandru Kristaly, Vicentiu D. Radulescu, Csaba VargaJuly 2009
varga gy [email protected]

P A R T I
Variational Principles in MathematicalPhysics

1
Variational Principles
A man is like a fraction whosenumerator is what he is andwhose denominator is what hethinks of himself. The largerthe denominator the smallerthe fraction.
Leo Tolstoy (1828–1910)
Variational principles are very powerful techniques at the interplaybetween nonlinear analysis, calculus of variations, and mathematicalphysics. They have been inspired and have important applications inmodern research fields such as geometrical analysis, constructive quan-tum field theory, gauge theory, superconductivity, etc.
In this chapter we shortly recall the main variational principles whichwill be used in the sequel, as Ekeland and Borwein-Preiss variationalprinciples, minimax- and minimization-type principles (mountain passtheorem, Ricceri-type multiplicity theorems, Brezis-Nirenberg minimiza-tion technique), the principle of symmetric criticality for non-smoothSzulkin-type functionals, as well as the Pohozaev’s fibering method.
1.1 Minimization techniques and Ekeland variationalprinciple
Many phenomena arising in applications (such as geodesics or minimalsurfaces) can be understood in terms of the minimization of an energyfunctional over an appropriate class of objects. For the problems ofmathematical physics, phase transitions, elastic instability, and diffrac-tion of the light are among the phenomena that can be studied from thispoint of view.
2

1.1 Minimization techniques and Ekeland variational principle 3
A central problem in many nonlinear phenomena is if a bounded frombelow and lower semi-continuous functional f attains its infimum. Asimple function when the above statement clearly fails is f : R → Rdefined by f(s) = e−s. Nevertheless, further assumptions either on f oron its domain may give a satisfactory answer. In the sequel, we give twouseful forms of the well-known Weierstrass theorem.
Theorem 1.1 [Minimization; compact case] Let X be a compact topo-logical space and f : X → R∪+∞ a lower semi-continuous functional.Then f is bounded from below and its infimum is attained on X.
Proof The set X can be covered by the open family of sets Sn :=u ∈ X : f(u) > −n, n ∈ N. Since X is compact, there exists afinite number of sets Sn0 , . . . , Snl
which also cover X. Consequently,f(u) > −maxn0, . . . , nl for all u ∈ X.
Let s = infX f > −∞. Arguing by contradiction, we assume that s isnot achieved which means in particular that X = ∪∞n=1u ∈ X : f(u) >
s+1/n. Due to the compactness of X, there exists a number n0 ∈ N suchthat X = ∪n0
n=1u ∈ X : f(u) > s + 1/n. In particular, f(u) > s + 1/n1
for all u ∈ X which is in contradiction with s = infX f > −∞.
The following result is a very useful tool in the study of various partialdifferential equations where no compactness is assumed on the domainof the functional.
Theorem 1.2 [Minimization; noncompact case] Let X be a reflexiveBanach space, M be a weakly closed, bounded subset of X, and f : M →R be a sequentially weak lower semi-continuous function. Then f isbounded from below and its infimum is attained on M .
Proof We argue by contradiction, that is, we assume that f is notbounded from below on M . Then, for every n ∈ N there exists un ∈ M
such that f(un) < −n. Since M is bounded, the sequence un ⊂ M
is so. Due to the reflexivity of X, one may subtract a subsequenceunk
of un which weakly converges to an element x ∈ X. SinceM is weakly closed, x ∈ M . Since f : M → R is sequentially weaklower semi-continuous, we obtain that f(x) ≤ lim infk→∞ f(unk
) = −∞,contradiction. Therefore, f is bounded from below.
Let un ⊂ M be a minimizing sequence of f over M , that is,limn→∞ f(un) = infM f > −∞. As before, there is a subsequence

4 Variational Principles
unk of un which weakly converges to an element x ∈ M. Due to
the sequentially weak lower semi-continuity of f , we have that f(x) ≤lim infk→∞ f(unk
) = infM f, which concludes the proof.
For any bounded from below, lower semi-continuous functional f ,Ekeland’s variational principle provides a minimizing sequence whoseelements minimize an appropriate sequence of perturbations of f whichconverges locally uniformly to f . Roughly speaking, Ekeland’s varia-tional principle states that there exist points which are almost pointsof minima and where the “gradient” is small. In particular, it is notalways possible to minimize a nonnegative continuous function on acomplete metric space. Ekeland’s variational principle is a very basictool that is effective in numerous situations, which led to many newresults and strengthened a series of known results in various fields ofanalysis, geometry, the Hamilton-Jacobi theory, extremal problems, theLjusternik-Schnirelmann theory, etc.
Its precise statement is as follows.
Theorem 1.3 [Ekeland’s variational principle] Let (X, d) be a completemetric space and let f : X → R ∪ ∞ be a lower semi-continuous,bounded from below functional with D(f) = u ∈ X : f(u) < ∞ 6= ∅.Then for every ε > 0, λ > 0, and u ∈ X such that
f(u) ≤ infX
f + ε
there exists an element v ∈ X such that
a) f(v) ≤ f(u);b) d(v, u) ≤ 1
λ;
c) f(w) > f(v)− ελd(w, v) for each w ∈ X \ v.
Proof It is sufficient to prove our assertion for λ = 1. The general caseis obtained by replacing d by an equivalent metric λd. We define therelation on X:
w ≤ v ⇐⇒ f(w) + εd(v, w) ≤ f(v).
It is easy to see that this relation defines a partial ordering on X. Wenow construct inductively a sequence un ⊂ X as follows: u0 = u, andassuming that un has been defined, we set
Sn = w ∈ X : w ≤ un

1.1 Minimization techniques and Ekeland variational principle 5
and choose un+1 ∈ Sn so that
f(un+1) ≤ infSn
f +1
n + 1.
Since un+1 ≤ un then Sn+1 ⊂ Sn and by the lower semi-continuity of f ,Sn is closed. We now show that diamSn → 0. Indeed, if w ∈ Sn+1, thenw ≤ un+1 ≤ un and consequently
εd(w, un+1) ≤ f(un+1)− f(w) ≤ infSn
f +1
n + 1− inf
Sn
f =1
n + 1.
This estimate implies that
diamSn+1 ≤ 2ε(n + 1)
and our claim follows. The fact that X is complete implies that⋂
n≥0
Sn =
v for some v ∈ X. In particular, v ∈ S0, that is, v ≤ u0 = u and hence
f(v) ≤ f(u)− εd(u, v) ≤ f(u)
and moreover
d(u, v) ≤ 1ε(f(u)− f(v)) ≤ 1
ε(inf
Xf + ε− inf
Xf) = 1.
Now, let w 6= v. To complete the proof we must show that w ≤ v
implies w = v. If w ≤ v, then w ≤ un for each integer n ≥ 0, that isw ∈ ∩n≥0Sn = v. So, w v, which is actually c).
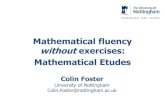
In RN with the Euclidean metric, properties a) and c) in the statementof Ekeland’s variational principle are completely intuitive as Figure 1.1shows. Indeed, assuming that λ = 1, let us consider a cone lying belowthe graph of f , with slope +1, and vertex projecting onto u. We moveup this cone until it first touches the graph of f at some point (v, f(v)).Then the point v satisfies both a) and c).
In the particular case X = RN we can give the following simple al-ternative proof to Ekeland’s variational principle, due to Hiriart-Urruty,[139]. Indeed, consider the perturbed functional
g(w) := f(w) + ελ ‖w − u‖ , w ∈ RN .
Since f is lower semi-continuous and bounded from below, then g is lowersemi-continuous and lim‖w‖→∞ g(w) = +∞. Therefore there exists v ∈RN minimizing g on RN such that for all w ∈ RN
f(v) + ελ ‖v − u‖ ≤ f(w) + ελ ‖w − u‖ . (1.1)

6 Variational Principles
!
u vX
y=f(x)
Fig. 1.1. Geometric illustration of Ekeland’s variational principle.
By letting w = u we find
f(v) + ελ ‖v − u‖ ≤ f(u)
and a) follows. Now, since f(u) ≤ infRN f + ε, we also deduce that‖v − u‖ ≤ 1/λ.
We infer from relation (1.1) that for any w,
f(v) ≤ f(w) + ελ [‖w − u‖ − ‖v − u‖] ≤ f(w) + ελ ‖w − u‖ ,
which is the desired inequality c).
Taking λ = 1√ε
in the above theorem we obtain the following property.
Corollary 1.1 Let (X, d) be a complete metric space and let f : X →R ∪ ∞ be a lower semi-continuous, bounded from below and D(f) =u ∈ X : f(u) < ∞ 6= ∅. Then for every ε > 0 and every u ∈ X suchthat
f(u) ≤ infX
f + ε
there exists an element uε ∈ X such that
a) f(uε) ≤ f(u);b) d(uε, u) ≤ √
ε;c) f(w) > f(uε)−
√εd(w, uε) for each w ∈ X \ uε.

1.1 Minimization techniques and Ekeland variational principle 7
Let (X, ‖ · ‖) be a real Banach space, X? its topological dual endowedwith its natural norm, denoted for simplicity also by ‖ · ‖. We denote by〈·, ·〉 the duality mapping between X and X?, that is, 〈x?, u〉 = x?(u)for every x? ∈ X?, u ∈ X. Theorem 1.3 readily implies the followingproperty, which asserts the existence of almost critical points. In orderwords, Ekeland’s variational principle can be viewed as a generalizationof the Fermat theorem which establishes that interior extrema points ofa smooth functional are, necessarily, critical points of this functional.
Corollary 1.2 Let X be a Banach space and let f : X → R be a lowersemi-continuous functional which is bounded from below. Assume thatf is Gateaux differentiable at every point of X. Then for every ε > 0there exists an element uε ∈ X such that
(i) f(uε) ≤ infX
f + ε;
(ii) ‖f ′(uε)‖ ≤ ε.
Letting ε = 1/n, n ∈ N, Corollary 1.2 gives rise a minimizing sequencefor the infimum of a given function which is bounded from below. Notehowever that such a sequence need not converge to any point. Indeed, letf : R→ R defined by f(s) = e−s. Then, infR f = 0, and any minimizingsequence fulfilling (a) and (b) from Corollary 1.2 tends to +∞. Thefollowing definition is dedicated to handle such situations.
Definition 1.1 (a) A function f ∈ C1(X,R) satisfies the Palais-Smalecondition at level c ∈ R (shortly, (PS)c-condition) if every sequenceun ⊂ X such that limn→∞ f(un) = c and limn→∞ ‖f ′(un)‖ = 0,possesses a convergent subsequence.
(b) A function f ∈ C1(X,R) satisfies the Palais-Smale condition(shortly, (PS)-condition) if it satisfies the Palais-Smale condition at ev-ery level c ∈ R.
Combining this compactness condition with Corollary 1.2, we obtain thefollowing result.
Theorem 1.4 Let X be a Banach space and a function f ∈ C1(X,R)which is bounded from below. If f satisfies the (PS)c-condition at levelc = infX f , then c is a critical value of f , that is, there exists a pointu0 ∈ X such that f(u0) = c and u0 is a critical point of f , that is,f ′(u0) = 0.

8 Variational Principles
1.2 Borwein-Preiss variational principle
The Borwein-Preiss variational principle [44] is an important tool ininfinite dimensional nonsmooth analysis. This basic result is stronglyrelated with Stegall’s variational principle [278], smooth bumps on Ba-nach spaces, Smulyan’s test describing the relationship between Frechetdifferentiability and the strong extremum, properties of continuous con-vex functions on separable Asplund spaces, variational characterizationsof Banach spaces, the Bishop-Phelps theorem or Phelps’ lemma [239].The generalized version we present here is due to Loewen and Wang[195] and enables us to deduce the standard form of the Borwein-Preissvariational principle, as well as other related results.
Let X be a Banach space and assume that ρ : X→[0,∞) is a contin-uous function satisfying
ρ(0) = 0 and ρM := sup‖x‖; ρ(x) < 1 < +∞ . (1.2)
An example of function with these properties is ρ(x) = ‖x‖p withp > 0.
Given the families of real numbers µn ∈ (0, 1) and vectors en ∈ X
(n ≥ 0), we associate to ρ the penalty function ρ∞ defined for all x ∈ X,
ρ∞(x) =∞∑
n=0
ρn(x− en), where ρn(x) := µnρ((n + 1)x) . (1.3)
Definition 1.2 For the function f : X→R∪+∞, a point x0 ∈ X is astrong minimizer if f(x0) = infX f and every minimizing sequence (zn)of f satisfies ‖zn − x0‖→0 as n→∞.
We observe that any strong minimizer of f is, in fact, a strict mini-mizer, that is f(x) > f(x0) for all x ∈ X \ x0. The converse is true,as shown by f(x) = x2ex, x ∈ R, x0 = 0.
The generalized version of the Borwein-Preiss variational principle dueto Loewen and Wang is the following.
Theorem 1.5 Let f : X→R ∪ +∞ be a lower semi-continuous func-tion. Assume that x0 ∈ X and ε > 0 satisfy
f(x0) < ε + infX
f .
Let (µn)n≥0 be a decreasing sequence in (0, 1) such that the series∑∞n=0 µn is convergent. Then for any continuous function ρ satisfying
(1.2), there exists a sequence (en)n≥0 in X converging to e such that

1.2 Borwein-Preiss variational principle 9
(i) ρ(x0 − e) < 1;(ii) f(e) + ερ∞(e) ≤ f(x0);(iii) e is a strong minimizer of f + ερ∞. In particular, e is a strict
minimizer of f + ερ∞, that is,
f(e) + ερ∞(e) < f(x) + ερ∞(x) for all x ∈ X \ e.
Proof Define the sequence (fn)n≥0 such that f0 = f and for any n ≥ 0,
fn+1(x) := fn(x) + ερn(x− en) .
Then fn ≤ fn+1 and fn is lower semi-continuous.Set e0 = x0. We observe that for any n ≥ 0,
infX
fn+1 ≤ fn+1(en) = fn(en) . (1.4)
If this inequality is strict, then there exists en+1 ∈ X such that
fn+1(en+1) ≤ µn+1
2fn(en) +
(1− µn+1
2
)infX
fn+1 ≤ fn(en) . (1.5)
If equality holds in relation (1.4) then (1.5) also holds, but for en+1
replaced with en. Consequently, there exists a sequence (en)n≥0 in X
such that relation (1.5) holds true.Set
Dn :=
x ∈ X; fn+1(x) ≤ fn+1(en+1) +εµn
2
.
Then Dn is not empty, since en+1 ∈ Dn. By the lower semi-continuity offunctions fn we also deduce that Dn is a closed set. Since µn+1 ∈ (0, 1),relation (1.5) implies
fn+1(en+1)− infX
fn+1 ≤ µn+1
2[fn(en)− inf
Xfn+1]
≤ fn(en)− infX
fn .(1.6)
We also observe that
f0(e0)− infX
f0 = f(x0)− infX
f < ε .
Next, we prove that
the sequence (Dn)n≥0 is decreasing (1.7)
and
diam (Dn)→0 as n→∞. (1.8)

10 Variational Principles
In order to prove (1.7), assume that x ∈ Dn, n ≥ 1. Since the sequence(µn)n≥0 is decreasing, relation (1.5) implies
fn(x) ≤ fn+1(x) ≤ fn+1(en+1) +εµn
2≤ fn(en) +
εµn−1
2,
hence x ∈ Dn−1.Since fn ≥ fn−1, relations (1.5) and (1.6) imply
fn(en)− infX
fn ≤ µn
2[fn−1(en−1)− inf
Xfn]
≤ µn
2[fn−1(en−1)− inf
Xfn−1] <
εµn
2.
(1.9)
For any x ∈ Dn, combining relation (1.9) and the definitions of fn+1
and Dn we obtain
εµnρ((n + 1)(x− en)) ≤ fn+1(en+1)− fn(x) +εµn
2≤ fn+1(en+1)− inf
Xfn +
εµn
2≤ fn(en)− inf
Xfn +
εµn
2< εµn .
(1.10)
Therefore ρ((n + 1)(x− en)) < 1. So, by (1.2),
(n + 1)‖x− en‖ ≤ ρM ,
which shows that diam (Dn) ≤ 2ρM/(n + 1). This implies (1.8).Since Dn is a closed set for any n ≥ 1, then (1.7) and (1.8) imply that
∩∞n=1Dn contains a single point, denoted by e. Then en→e as n→∞.Thus, using ρ((n + 1)(x− en)) < 1 for all n ≥ 0 and x ∈ X, we deducethat ρ(x0 − e) < 1.
Since the sequence (fn(en))n≥0 is nonincreasing and f0(e0) = f(x0)it follows that, in order to prove (ii), it is enough to deduce that
f(e) + ερ∞(e) ≤ fn(en) . (1.11)
For this purpose we define the nonempty closed sets
Cn := x ∈ X; fn+1(x) ≤ fn+1(en+1) .
Since fn ≤ fn+1 and fn(en) ≥ fn+1(en+1) for all n, it follows that thesequence (Cn)n≥0 is nested and Cn ⊂ Dn for all n. Therefore ∩∞n=0Cn =e and
fm(e) ≤ fm(em) ≤ fn(en) ≤ f(x0) provided that m > n. (1.12)
Taking m→∞ we obtain (1.11).

1.2 Borwein-Preiss variational principle 11
It remains to argue that e is a strong minimizer of fε := f + ερ∞.Since
fε(x) ≤ infX
fε +εµn
2,
relation (1.12) yields
fn+1(x) ≤ fε(x) ≤ fε(e) +εµn
2≤ fn+1(en+1) +
εµn
2.
Setting
An :=
x ∈ X; fε(x) ≤ εµn
2+ inf
Xf
,
the above relation shows that An ⊂ Dn. So, by (1.8), we deduce thatdiam (An)→0 as n→∞ which shows that e is a strong minimizer offε := f + ερ∞.
Assume that p ≥ 1 and λ > 0. Taking
ρ(x) =‖x‖p
λpand µn =
12n+1(n + 1)
we obtain the initial smooth version of the Borwein-Preiss variationalprinciple. Roughly speaking, it asserts that the Lipschitz perturbationsobtained in Ekeland’s variational principle can be replaced by superlinearperturbations in a certain class of admissible functions.
Theorem 1.6 Given f : X→R∪+∞ lower semi-continuous function,x0 ∈ X, ε > 0, λ > 0, and p ≥ 1, suppose
f(x0) < ε + infX
f .
Then there exists a sequence (µn)n≥0 with µn ≥ 0,∑∞
n=0 µn = 1, anda point e in X, expressible as the limit of some sequence (en), such thatfor all x ∈ X,
f(x) +ε
λp
∞∑n=0
µn ‖x− en‖p ≥ f(e) +ε
λp
∞∑n=0
µn ‖e− en‖p .
Moreover, ‖x0 − e‖ < λ and f(e) ≤ ε + infX f .
We have seen in Corollary 1.2 of Ekeland’s variational principle thatany smooth bounded from below functional on a Banach space admits asequence of “almost critical points”. The next consequence of Borwein-Preiss’ variational principle asserts that, in the framework of Hilbertspaces, such a functional admits a sequence of stable “almost criticalpoints”.

12 Variational Principles
Corollary 1.3 Let f be a real-valued C2-functional that is bounded frombelow on a Hilbert space X. Assume that (un) is a minimizing sequenceof f . Then there exists a minimizing sequence (vn) of f such that thefollowing properties hold true:
(i) limn→∞ ‖un − vn‖ = 0;(ii) limn→∞ ‖f ′(vn)‖ = 0;(iii) lim infn→∞〈f ′′(vn)w,w〉 ≥ 0 for any w ∈ X.
1.3 Minimax principles
In this section we are interested in some powerful techniques for findingsolutions of some classes of stationary nonlinear boundary value prob-lems. These solutions are viewed as critical points of a natural func-tional, often called the energy associated to the system. The criticalpoints obtained in this section by means of topological techniques aregenerally nonstable critical points which are neither maxima nor minimaof the energy functional.
1.3.1 Mountain pass type results
In many nonlinear problems we are interested in finding solutions asstationary points of some associated “energy” functionals. Often such amapping is unbounded from above and below, so that it has no maximumor minimum. This forces us to look for saddle points, which are obtainedby minimax arguments. In such a case one maximizes a functional f overa closed set A belonging to some family Γ of sets and then one minimizeswith respect to the set A in the family. Thus we define
c = infA∈Γ
supu∈A
f(u) (1.13)
and one tries to prove, under various hypotheses, that this number c isa critical value of f , hence there is a point u such that f(u) = c andf ′(u) = 0. Indeed, it seems intuitively obvious that c defined in (1.13)is a critical value of f . However, this is not true in general, as showedby the following example in the plane: let f(x, y) = x2 − (x − 1)3y2.Then (0, 0) is the only critical point of f but c is not a critical value.Indeed, looking for sets A lying in a small neighborhood of the origin,then c > 0. This example shows that the heart of the matter is to findappropriate conditions on f and on the family Γ.
One of the most important minimax results is the so-called mountain

1.3 Minimax principles 13
pass theorem whose geometrical interpretation will be roughly describedin the sequel. Denote by f the function which measures the altitude of amountain terrain and assume that there are two points in the horizontalplane L1 and L2, representing the coordinates of two locations suchthat f(L1) and f(L2) are the deepest points of two separated valleys.Roughly speaking, our aim is to walk along an optimal path on themountain from the point (L1, f(L1)) to (L2, f(L2)) spending the leastamount of energy by passing the mountain ridge between the two valleys.Walking on a path (γ, f(γ)) from (L1, f(L1)) to (L2, f(L2)) such thatthe maximal altitude along γ is the smallest among all such continuouspaths connecting (L1, f(L1)) and (L2, f(L2)), we reach a point L on γ
passing the ridge of the mountain which is called a mountain pass point.As pointed out by Brezis and Browder [47], the mountain pass theorem“extends ideas already present in Poincare and Birkhoff”.
In the sequel, we give a first formulation of the mountain pass theorem.
Theorem 1.7 [Mountain pass theorem; positive altitude] Let X be aBanach space, f : X → R be a function of class C1 such that
inf‖u−e0‖=ρ
f(u) ≥ α > maxf(e0), f(e1)
for some α ∈ R and e0 6= e1 ∈ X with 0 < ρ < ‖e0 − e1‖. If f satisfiesthe (PS)c-condition at level
c = infγ∈Γ
maxt∈[0,1]
f(γ(t)),
where
Γ = γ ∈ C([0, 1], X) : γ(0) = e0, γ(1) = e1,then c is a critical value of f with c ≥ α.
There are two different ways to prove Theorem 1.7; namely, via Eke-land’s variational principle, or by using a sort of deformation lemma. Wepresent its proof by means of the latter argument. We refer to Figure1.3.1 for a geometric illustration of Theorem 1.7.
Proof of Theorem 1.7. We may assume that e0 = 0 and let e := e1.
Since f(u) ≥ α for every u ∈ X with ‖u‖ = ρ and ρ < ‖e‖, the definitionof the number c shows that α ≤ c.
It remains to prove that c is a critical value of f . Arguing by con-tradiction, assume Kc = ∅. Thus, on account of Remark D.1, we maychoose O = ∅ in Theorem D.1, see Appendix D, and ε > 0 such thatε < minα − f(0), α − f(e). Consequently, there exist ε > 0 and a

14 Variational Principles
S
X
!
e
e
p
0
1
Fig. 1.2. Mountain pass landscape between “villages” e0 and e1.
continuous map η : X × [0, 1] → X verifying the properties (i)-(iv) fromTheorem D.1.
From the definition of the number c, there exists γ ∈ Γ such that
maxt∈[0,1]
f(γ(t)) ≤ c + ε. (1.14)
Let γ1 : [0, 1] → X defined by γ1(t) = η(γ(t), 1), ∀t ∈ [0, 1].We prove that γ1 ∈ Γ. The choice of ε > 0 gives that maxf(0), f(e) <
α − ε ≤ c − ε, thus 0, e /∈ f−1(]c − ε, c + ε[). Consequently, dueto Theorem D.1 (iii), we have γ1(0) = η(γ(0), 1) = η(0, 1) = 0 andγ1(1) = η(γ(1), 1) = η(e, 1) = e. Therefore, γ1 ∈ Γ.
Note that (1.14) means that γ(t) ∈ f c+ε = u ∈ X : f(u) ≤ c + ε forall t ∈ [0, 1]. Then by Theorem D.1 (iv) and the definition of γ1 we have
c ≤ maxt∈[0,1]
f(γ1(t)) = maxt∈[0,1]
f(η(γ(t), 1)) ≤ c− ε,
contradiction.
Remark 1.1 Using Theorem D.1, we can provide an alternative proofto Theorem 1.4. Indeed, if we suppose that Kc = ∅, with c = infX f >
−∞, one may deform continuously the level set fc+ε (for ε > 0 small

1.3 Minimax principles 15
enough) into a subset of f c−ε, see Theorem D.1 (iv). But, f c−ε = ∅,contradiction.
Remark 1.2 Note that the choice of 0 < ε < minα − f(0), α − f(e)with inf‖u‖=ρ f(u) ≥ α is crucial in the proof of Theorem 1.7. Actually,it means that the ridge of the mountain between the two valleys has apositive altitude. However, a more involved proof allows us to handlethe so-called ”zero altitude” case. More precisely, the following resultholds.
Theorem 1.8 [Mountain pass theorem; zero altitude] Let X be a Ba-nach space, f : X → R be a function of class C1 such that
inf‖u−e0‖=ρ
f(u) ≥ maxf(e0), f(e1)
for some e0 6= e1 ∈ X with 0 < ρ < ‖e0 − e1‖. If f satisfies the (PS)c-condition at level
c = infγ∈Γ
maxt∈[0,1]
f(γ(t)),
where
Γ = γ ∈ C([0, 1], X) : γ(0) = e0, γ(1) = e1,then c is a critical value of f with c ≥ maxf(e0), f(e1).
Remark 1.3 In both Theorems 1.7 and 1.8 the Palais-Smale conditionmay be replaced by a weaker one, called the Cerami compactness condi-tion. More precisely, a function f ∈ C1(X,R) satisfies the Cerami condi-tion at level c ∈ R (shortly, (C)c-condition) if every sequence un ⊂ X
such that limn→∞ f(un) = c and limn→∞(1 + ‖un‖)‖f ′(un)‖ = 0, pos-sesses a convergent subsequence.
1.3.2 Minimax results via Ljusternik-Schnirelmann category
A very useful method to find multiple critical points for a given func-tional is related to the notion of Ljusternik-Schnirelmann category. Inthe case of variational problems on finite dimensional manifolds, thisnotion is useful to find a lower bound for the number of critical pointsin terms of topological invariants. In this subsection we present a gen-eral form of this approach. We first present some basic properties ofFinsler-Banach manifolds.
Let M be a Banach manifold of class C1 and let TM be the usual

16 Variational Principles
tangent bundle, TpM the tangent space at the point p ∈ M . A Finslerstructure on the Banach manifold M can be introduced as follows.
Definition 1.1 A Finsler structure on TM is a continuous function‖ · ‖ : TM → [0,∞) such that
(a) for each p ∈ M the restriction ‖ · ‖p = ‖ · ‖|TpM is a norm onTpM .
(b) for each p0 ∈ M and k > 1, there is a neighborhood U ⊂ M ofp0 such that
1k‖ · ‖p ≤ ‖ · ‖p0 ≤ k‖ · ‖p
for all p ∈ U .
The Banach manifold M of class C1 endowed with a Finsler structureis called Banach-Finsler manifold M of class C1.
Definition 1.2 Let M be a Banach-Finsler manifold of class C1 and σ :
[a, b] → M a C1-path. The length of σ is defined by l(σ) =∫ b
a
‖σ′(t)‖dt.
If p and q are in the same component of M we define the distance fromp to q by
ρ(p, q) = infl(σ) : σ is a C1 − path from p to q.
Definition 1.3 A Banach-Finsler manifold M of class C1 is said to becomplete if the metric space (M,ρ) is complete.
Theorem 1.1 If M is a Banach-Finsler manifold of class C1 then thefunction ρ : M × M → R (from Definition 1.2) is a metric functionfor each component of M . Moreover, this metric is consistent with thetopology of M .
Theorem 1.2 If M is a Banach-Finsler manifold of class C1 and N
is a C1 submanifold of M , then ‖ · ‖ |T (N) is a Finsler structure for N
(called the Finsler structure induced from M). If M is complete and N
is a closed C1 submanifold of M , then N is a complete Banach-Finslermanifold in the induced Finsler structure.
On a Banach-Finsler manifold M the cotangent bundle TM? has adual Finsler structure defined by
‖y‖ = sup〈y, v〉 : v ∈ TpM, ‖v‖p = 1,

1.3 Minimax principles 17
where y ∈ TpM? and 〈·, ·〉 denotes the duality pairing between TpM
?
and TpM. Consequently, for a functional f : M → R of class C1, theapplication p 7→ ‖f ′(p)‖ is well-defined and continuous. These factsallow to introduce the following definition.
Definition 1.3 Let M be a Banach-Finsler manifold of class C1.(a) A function f ∈ C1(M,R) satisfies the Palais-Smale condition
at level c ∈ R (shortly, (PS)c-condition) if every sequence un ⊂ M
such that limn→∞ f(un) = c and limn→∞ ‖f ′(un)‖ = 0, possesses aconvergent subsequence.
(b) A function f ∈ C1(M,R) satisfies the Palais-Smale condition(shortly, (PS)-condition) if it satisfies the Palais-Smale condition at ev-ery level c ∈ R.
Let M be a Banach-Finsler manifold of class C1. For h ≥ 1, weintroduce the set
Γh = A ⊆ M : catM (A) ≥ h, A compact.Here, catM (A) denotes the Ljusternik-Schnirelmann category of the setA relative to M, see Appendix C.
If h ≤ catM (M) = cat(M), then Γh 6= ∅. Moreover, if cat(M) = +∞,we may take any positive integer h in the above definition. If f : M → Ris a functional of class C1, we denote by K the set of all critical pointsof f on M , that is, K = u ∈ M : f ′(u) = 0 and Kc = K ∩ f−1(c).Finally, for every h ≤ cat(M) we define the number
ch = infA∈Γh
maxu∈A
f(u).
Proposition 1.1 Let f : X → R be a functional of class C1. Using theabove notations, we have
a) c1 = infM f.
b) ch ≤ ch+1.
c) ch < ∞ for every h ≤ cat(M).d) If c := ch = ch+m−1 for some h, m ≥ 1, and f satisfies the (PS)c-
condition, then catM (Kc) ≥ m. In particular, Kc 6= ∅.
Proof Properties a)-c) are obvious. To prove d), we argue by con-tradiction. Thus, we assume that catM (Kc) ≤ m − 1. Since M isan ANR , there exists a neighborhood O of Kc such that catM (O) =catM (Kc) ≤ m − 1. By using Theorem D.1, there exists a continuous

18 Variational Principles
map η : X × [0, 1] → X and ε > 0 such that η(f c+ε \ O, 1) ⊂ f c−ε andη(u, 0) = u for all u ∈ X. Let A1 ∈ Γh+m−1 such that maxu∈A1 f(u) ≤c + ε. Considering the set A2 = A1 \ O, we obtain that
catM (A2) ≥ catM (A1)− catM (O) ≥ h + m− 1− (m− 1) = h.
Therefore, A2 ∈ Γh. Moreover, maxu∈A2 f(u) ≤ maxu∈A1
f(u) ≤ c + ε and
A2 ∩ O = ∅. In conclusion, we have A2 ⊂ f c+ε \ O. Due to TheoremD.1 (iv), η(A2, 1) ⊂ f c−ε. Moreover, catM (η(A2, 1)) ≥ catM (A2) ≥ h,thus η(A2, 1) ∈ Γh. But c = inf
A∈Γh
maxu∈A
f(u) ≤ max f(η(A2, 1)) ≤ c − ε,
contradiction.
The main result of the present subsection is the following theorem.
Theorem 1.9 Let M be a complete Banach-Finsler manifold of classC1, and f : M → R a functional of class C1 which is bounded frombelow on M . If f satisfies the (PS)-condition then f has at least cat(M)critical points.
Proof Since f is bounded from below, every ch is finite, h = 1, . . . , cat(M),see Proposition 1.1 c). To prove the statement, it is enough to show that
card(K ∩ f ch) ≥ h, h = 1, . . . , cat(M). (1.15)
We proceed by induction. For h = 1, relation (1.15) is obvious sincethe global minimum belongs to K. Now, we assume that (1.15) holds forh = 1, . . . , k. We will prove that (1.15) also holds for k + 1. There aretwo cases:
I) ck 6= ck+1. Due to Proposition 1.1 d), we have that Kck+1 6= ∅.Consequently, each element of the set Kck+1 clearly differs from those ofthe set K ∩ f ck . Therefore, K ∩ fck+1 contains at least k + 1 points.
II) ck = ck+1 := c. Let m be the least positive integer such thatcm = ck+1. Due to Proposition 1.1 d), we have catM (Kc) ≥ k + 1−m +1 = k−m + 2. In particular, card(Kc) = card(Kck+1) ≥ k−m + 2. Twodistinguish again two subcases:
IIa) m = 1. The claim easily follows.IIb) m > 1. Since m ≤ k, then card(K∩f cm−1) ≥ m−1. Consequently,
card(K ∩ f ck+1) ≥ card(K ∩ f cm−1) + card(Kck+1)
≥ (m− 1) + (k −m + 2)
= k + 1,

1.3 Minimax principles 19
which complete the proof of (1.15), thus the theorem.
Let X be an infinite dimensional, separable real Banach space andS = u ∈ X : ‖u‖ = 1 its unit sphere. Important questions appearwhen the study of some classes of nonlinear elliptic problems reduce tofinding critical points of a given functional on S. Note that cat(S) = 1;therefore, Theorem 1.9 does not give multiple critical points on S. How-ever, exploiting the symmetric property of S, by means of the Krasnosel-ski genus, see Appendix C, a multiplicity result may be given, similar toTheorem 1.9. In order to state this result, we put ourselves to a generalframework.
Let X be a real Banach space, and we denote the family of sets
A = A ⊂ X \ 0 : A = −A, A is closed.Assume that M = G−1(0) ∈ A is a submanifold of X, where G : X → Ris of class C1 with G′(u) 6= 0 for every u ∈ M.
For any h ≤ γ0(M) := supγ(K) : K ⊆ M, K ∈ A, K compact, weintroduce the set
Ah = A ⊆ M : A ∈ A, γ(A) ≥ h, A compact.Here, γ(A) denotes the Krasnoselski genus of the set A, see AppendixC. Finally, if f : X → R is an even function, we denote
ch = infA∈Ah
maxu∈A
f(u).
Proposition 1.2 Let f : X → R be an even functional of class C1.Using the above notations, we have
a) c1 > −∞ whenever f is bounded from below on M .b) ch ≤ ch+1.
c) ch < ∞ for every h ≤ γ0(M).d) If c := ch = ch+m−1 for some h, m ≥ 1, and f satisfies the (PS)c-
condition on M , then γ(Kc) ≥ m. In particular, Kc 6= ∅.The following result may be stated.
Theorem 1.10 Let M = G−1(0) ⊂ X be a submanifold of a real Banachspace, where G : X → R is of class C1 with G′(u) 6= 0 for every u ∈ M.
Assume that M ∈ A and let f : X → R be a functional of class C1
which is bounded from below on M and even. If γ(M) = +∞ and f
satisfies the (PS)-condition on M then f has infinitely many criticalpoints uk ⊂ M with limk→∞ f(uk) = supM f.

20 Variational Principles
1.4 Ricceri’s variational results
The main part of the present section is dedicated to Ricceri’s recent mul-tiplicity results. First, several three critical points results with one/twoparameter are stated. In the second subsection a general variationalprinciple of Ricceri is presented. Finally, in the last subsection a newkind of multiplicity result of Ricceri is given which guarantees the exis-tence of k ≥ 2 distinct critical points for a fixed functional.
1.4.1 Three critical point results
It is a simple exercise to show that a function f : R → R of class C1
having two local minima has necessarily a third critical point. However,once we are dealing with functions defined on a multi-dimensional space,the problem becomes much deeper. The well-known form of the threecritical point theorem is due to Pucci-Serrin [246, 247] and it can beformulated as follows.
Theorem 1.11 A function f : X → R of class C1 satisfies the (PS)-condition and it has two local minima. Then f has at least three distinctcritical points.
Proof Without loss of generality we may assume that 0 and e ∈ X \0are the two local minima of f and f(e) ≤ f(0) = 0. We face two cases:
I) If there exist constants α, ρ > 0 such that ‖e‖ > ρ and inf‖u‖=ρ f(u) ≥α, then the existence of a critical point of f at a minimax level c withc ≥ α is guaranteed by Theorem 1.7. Consequently, this critical pointcertainly differs from 0 and e.
II) Assume now that such constants do not exist as in I). Since 0 isa local minima of f , we may choose r < ‖e‖ such that f(u) ≥ 0 forevery u ∈ X with ‖u‖ ≤ r. We apply Ekeland’s variational principle,
see Theorem 1.3 with ε =1n2
, λ = n and f restricted to the closed ball
B[0, r] = u ∈ X : ‖u‖ ≤ r. Let us fix 0 < ρ < r small enough. Sinceinf‖u‖=ρ f(u) = 0, there exist zn ∈ X with ‖zn‖ = ρ and un ∈ B[0, r]such that
0 ≤ f(un) ≤ f(zn) ≤ 1n2
, ‖un − zn‖ ≤ 1n
and
f(w)− f(un) ≥ − 1n‖w − un‖

1.4 Ricceri’s variational results 21
for all w ∈ B[0, r]. Since ρ < r, for n enough large, we have ‖un‖ < r.Fix v ∈ X arbitrarily and let w = un + tv. If t > 0 is small enough thenw ∈ B[0, r]. Therefore, with this choice, the last inequality gives that‖f ′(un)‖ ≤ 1
n . Since 0 ≤ f(un) ≤ 1n2 and f satisfies the (PS)-condition,
we may assume that un → u ∈ X which is a critical point of f . Since|‖un‖ − ρ| = |‖un‖ − ‖zn‖| ≤ 1
n , we actually have that ‖u‖ = ρ, thus0 6= u 6= e.
Let f : X × I → X be a function such that f(·, λ) is of class C1 forevery λ ∈ I ⊂ R. In view of Theorem 1.11, the main problem Ricceridealt with is the stability of the three critical points of f(·, λ) with respectto the parameters λ ∈ I. Ricceri’s main three critical point theorem isthe following.
Theorem 1.12 Let X be a separable and reflexive real Banach space,I ⊆ R be an interval, and f : X × I → R be a function satisfying thefollowing conditions:
(α1) for each u ∈ X, the function f(u, ·) is continuous and concave;(β1) for each λ ∈ I, the function f(·, λ) is sequentially weakly lower
semi-continuous and Gateaux differentiable, and lim‖u‖→+∞
f(u, λ) = +∞;
(γ1) there exists a continuous concave function h : I → R such that
supλ∈I
infu∈X
(f(u, λ) + h(λ)) < infu∈X
supλ∈I
(f(u, λ) + h(λ)).
Then, there exist an open interval J ⊆ I and a positive real number ρ,such that, for each λ ∈ J , the equation
f ′u(u, λ) = 0
has at least two solutions in X whose norms are less than ρ. If, inaddition, the function f is (strongly) continuous in X× I, and, for eachλ ∈ I, the function f(·, λ) is of class C1 and satisfies the (PS)-condition,then the above conclusion holds with ”three” instead of ”two”.
The proof of Theorem 1.12 is quite involved combining deep argumentsfrom nonlinear analysis as a topological minimax result of Saint Ray-mond [264], a general selector result of Kuratowski and Ryll-Nardzewski[182], [145], and the mountain pass theorem. Instead of its proof, we givea useful consequence of Theorem 1.12.
Corollary 1.4 Let X be a separable and reflexive real Banach space,Φ : X → R a continuously Gateaux differentiable and sequentially weakly

22 Variational Principles
lower semi-continuous functional whose Gateaux derivative admits acontinuous inverse on X?, Ψ : X → R a continuously Gateaux dif-ferentiable functional whose Gateaux derivative is compact, and I ⊆ Ran interval. Assume that
lim‖u‖→+∞
(Φ(u)− λΨ(u)) = +∞
for all λ ∈ I, and that there exists a continuous concave function h :I → R such that
supλ∈I
infu∈X
(Φ(u)− λΨ(u) + h(λ)) < infu∈X
supλ∈I
(Φ(u)− λΨ(u) + h(λ)).
Then, there exist an open interval J ⊆ I and a positive real number ρ
such that, for each λ ∈ J , the equation
Φ′(u)− λΨ′(u) = 0
has at least three solutions in X whose norms are less than ρ.
Proof We may apply Theorem 1.12 to the function f : X×I → R definedby f(u, λ) = Φ(u) − λΨ(u) for each (u, λ) ∈ X × I. In particular, thefact that Ψ′ is compact implies that Ψ is sequentially weakly continuous.Moreover, our assumptions ensure that, for each λ ∈ I, the functionf(·, λ) satisfies the (PS)-condition.
In the sequel we point out a useful result concerning the location ofparameters in Corollary 1.4. Actually, this location result is an improvedversion of Theorem 1.12 given by Bonanno [41].
Theorem 1.13 Let X be a separable and reflexive real Banach space,and let Φ, Ψ : X → R be two continuously Gateaux differentiable func-tionals. Assume that there exists u0 ∈ X such that Φ(u0) = Ψ(u0) = 0and Φ(u) ≥ 0 for every u ∈ X and that there exists u1 ∈ X, r > 0 suchthat
(i) r < Φ(u1);
(ii) supΦ(u)<r
Ψ(u) < rΨ(u1)Φ(u1)
.
Further, put
a =ζr
rΨ(u1)Φ(u1)
− supΦ(u)<r
Ψ(u),

1.4 Ricceri’s variational results 23
with ζ > 1, and assume that the functional Φ−λΨ is sequentially weaklylower semi-continuous, satisfies the (PS)-condition and
(iii) lim‖u‖→+∞
(Φ(u)− λΨ(u)) = +∞ for every λ ∈ [0, a].
Then, there exists an open interval Λ ⊂ [0, a] and a positive real num-ber ρ such that, for each λ ∈ Λ, the equation
Φ′(u)− λΨ′(u) = 0
admits at least three solutions in X whose norms are less than ρ.
Proof We prove the minimax inequality from Corollary 1.4 whit I =[0, a] and the function h suitable chosen. Fix ζ > 1. Due to (ii), thereexists σ ∈ R such that
supΦ(u)<r
Ψ(u) +
rΨ(u1)Φ(u1)
− supΦ(u)<r
Ψ(u)
ζ< σ < r
Ψ(u1)Φ(u1)
. (1.16)
Due to (i) and (1.16) we obtain that 0 < σ < Ψ(u1); thus, introducingthe notation A := σ Φ(u1)
Ψ(u1), we clearly have
A− Φ(u1)σ −Ψ(u1)
=A
σ. (1.17)
Let λ ∈ R. Due to (1.17), one has either λ ≥ A−Φ(u1)σ−Ψ(u1)
or λ < Aσ . When
λ ≥ A−Φ(u1)σ−Ψ(u1)
we have that
infu∈X
(Φ(u) + λ(σ −Ψ(u))) ≤ Φ(u1) + λ(σ −Ψ(u1)) ≤ A.
When λ < Aσ , we have
infu∈X
(Φ(u) + λ(σ −Ψ(u))) ≤ Φ(u0) + λ(σ −Ψ(u0)) = λσ < A.
Consequently,
supλ∈[0,a]
infu∈X
(Φ(u) + λ(σ −Ψ(u))) ≤ supλ∈R
infu∈X
(Φ(u) + λ(σ −Ψ(u))) ≤ A. (1.18)
Set k = [rΨ(u1)/Φ(u1) − supΦ(u)<r
Ψ(u)]/ζ > 0. On account of (1.16),
one has supΦ(u)<r
Ψ(u) < σ − k. In particular, we have
infΨ(u)>σ−k
Φ(u) ≥ r. (1.19)

24 Variational Principles
By (1.16) again, we have r > σ Φ(u1)Ψ(u1)
= A. Consequently, from (1.19)one has
infΨ(u)>σ−k
Φ(u) > A.
Moreover, we also have
ak = r > A.
After combining these facts, we obtain that
infu∈X
supλ∈[0,a]
(Φ(u) + λ(σ −Ψ(u))) = infu∈X
(Φ(u) + a max0, σ −Ψ(u))
≥ min
infΨ(u)>σ−k
Φ(u); infΨ(u)≤σ−k
Φ(u) + ak
> A.
Combining this estimate with (1.18), the minimax inequality from Corol-lary 1.4 holds with the choices I = [0, a] and h(λ) = λσ. The proof iscomplete.
We conclude the present subsection with a double eigenvalue problem.More precisely, we are interested in the minimal number of critical pointsof the functional Φ−λΨ (from Theorem 1.13) which is perturbed by anarbitrarily functional of class C1. To state this result, we are going toapply a pure topological result due to Ricceri [262].
Theorem 1.14 Let X be a reflexive real Banach space, I ⊆ R an inter-val, and ϕ : X × I → R a function such that ϕ(u, ·) is concave in I forall u ∈ X, while ϕ(·, λ) is continuous, coercive and sequentially weaklylower semi-continuous in X for all λ ∈ I. Further, assume that
supI
infX
ϕ < infX
supI
ϕ.
Then, for each η > supI infX ϕ, there exists a non-empty open set A ⊆ I
with the following property: for every λ ∈ A and every sequentiallyweakly lower semi-continuous functional Υ : X → R, there exists δ > 0such that for each µ ∈ [0, δ], the functional ϕ(·, λ) + µΥ(·) has at leasttwo local minima lying in the set u ∈ X : ϕ(u, λ) < η.
Now we prove another variant of Corollary 1.4 which appears in Ric-ceri [263].
Theorem 1.15 Let X be a separable and reflexive real Banach space,I ⊆ R an interval, Φ : X → R a sequentially weakly lower semi-continuous functional of class C1 whose derivative admits a continuous

1.4 Ricceri’s variational results 25
inverse on X? and Ψ : X → R a functional of class C1 with compactderivative. Assume that
lim‖u‖→+∞
(Φ(u)− λΨ(u)) = +∞
for all λ ∈ I, and that there exists σ ∈ R such that
supλ∈I
infu∈X
(Φ(u) + λ(σ −Ψ(u))) < infu∈X
supλ∈I
(σ −Ψ(u))). (1.20)
Then, there exist a non-empty open set A ⊆ I and a positive real numberρ with the following property: for every λ ∈ A and every functionalΥ : X → R of class C1 with compact derivative, there exists δ > 0 suchthat, for each µ ∈ [0, δ], the equation
Φ′(u)− λΨ′(u) + µΥ′(u) = 0
has at least three solutions in X whose norms are less than ρ.
Proof Note that any functional on X of class C1 with compact derivativeis sequentially weakly continuous; in particular, it is bounded on eachbounded subset of X, due to the reflexivity of X. Consequently, thefunction ϕ : X × I → R defined by
ϕ(u, λ) = Φ(u) + λ(σ −Ψ(u))
satisfies all the hypotheses of Theorem 1.14. Fix η > supI infX ϕ andconsider a non-empty open set A with the property stated in Theorem1.14. Fix also a compact interval [a, b] ⊂ A. We have
⋃
λ∈[a,b]
u ∈ X : ϕ(u, λ) < η
⊆ u ∈ X : Φ(u)− aΨ(u) < η− aσ∪ u ∈ X : Φ(u)− bΨ(u) < η− bσ.
Note that the set on the right-hand side is bounded, due to the coercivityassumption. Consequently, there is some η > 0 such that
⋃
λ∈[a,b]
u ∈ X : ϕ(u, λ) < η ⊆ Bη, (1.21)
where Bη = u ∈ X : ‖u‖ < η. Now, set
c? = supBη
Φ + max|a|, |b| supBη
|Ψ|

26 Variational Principles
and fix ρ > η such that⋃
λ∈[a,b]
u ∈ X : Φ(u)− λΨ(u) ≤ c? + 2 ⊆ Bρ. (1.22)
Now, let Υ : X → R be any functional of class C1 with compact deriva-tive. Let us choose a bounded function g : R→ R of class C1 such thatg(t) = t for all t ∈ [− supBρ
|Υ|, supBρ|Υ|]. Put Ψ(u) = g(Ψ(u)) for all
u ∈ X. So, Ψ is a bounded functional on X of class C1 such that
Υ(u) = Υ(u) for all x ∈ Bρ. (1.23)
For any set Y ⊂ X, we have
Υ′(Y ) ⊆ g′(Υ(Y ))Υ′(Y )
and hence it is clear that the derivative of Υ is compact. Now, fixλ ∈ [a, b]. Then, taking (1.21) into account, there exists δ > 0 such that,for each µ ∈ [0, δ], the functional Φ − λΨ + µΥ has two local minima,say e0, e1 belonging to Bη. Further, set
δ = min
δ,
11 + sup
R|g|
and fix µ ∈ [0, δ]. Note that the functional Φ − λΨ + µΥ is coercive;moreover, an easy argument shows that this functional satisfies also the(PS)-condition. Consequently, if we denote by Γ the set of all continuouspaths γ : [0, 1] → X such that γ(0) = e0, γ(1) = e1, and set
cλ,µ = infγ∈Γ
maxt∈[0,1]
(Φ(γ(t))− λΨ(γ(t)) + µΥ(γ(t))),
by the mountain pass theorem for zero altitude (see Theorem 1.8), thereexists e ∈ X such that
Φ′(e)− λΨ′(e) + µΥ′(e) = 0 and Φ(e)− λΨ(e) + µΥ(e) = cλ,µ.
Now, choosing in particular γ(t) = e0 + t(e1 − e0), we observe that
cλ,µ ≤ maxt∈[0,1]
(Φ(e0 + t(e1 − e0))
−λΨ(e0 + t(e1 − e0)) + µΥ(e0 + t(e1 − e0)))≤ supBη
Φ + max|a|, |b| supBη|Ψ|+ δ supR |g| ≤ c? + 1.
Consequently, we have
Φ(e)− λΨ(e) ≤ c? + 2.

1.4 Ricceri’s variational results 27
By (1.22), it then follows that e ∈ Bρ and so, by (1.23), one has Υ′(ei) =Υ′(ei) for i = 0, 1 and Υ′(e) = Υ′(e). In conclusion, e0, e1 and e arethree distinct solutions of the equation Φ′(u) − λΨ′(u) + µΥ′(u) = 0lying in Bρ. The proof is complete.
1.4.2 A general variational principle
The general variational principle of Ricceri gives alternatives for the mul-tiplicity of critical points of certain functions depending on a parameter.It can be stated in a following way, see Ricceri [256].
Theorem 1.16 Let X be a reflexive real Banach space, Φ, Ψ : X → Rbe two sequentially weakly lower semi-continuous, continuously Gateauxdifferentiable functionals. Assume that Ψ is strongly continuous andcoercive. For each s > infX Ψ, set
ϕ(s) := infu∈Ψs
Φ(u)− infclwΨs Φs−Ψ(u)
, (1.24)
where Ψs := u ∈ X : Ψ(u) < s and clwΨs is the closure of Ψs in theweak topology of X. Furthermore, set
δ := lim infs→(infX Ψ)+
ϕ(s), γ := lim infs→+∞
ϕ(s). (1.25)
Then, the following conclusions hold.
(A) If δ < +∞ then, for every λ > δ, either
(A1) there is a global minimum of Ψ which is a local minimum ofΦ + λΨ, or
(A2) there is a sequence uk of pairwise distinct critical points ofΦ + λΨ, with limk→∞Ψ(uk) = infX Ψ, weakly converging to aglobal minimum of Ψ.
(B) If γ < +∞ then, for every λ > γ, either
(B1) Φ + λΨ possesses a global minimum, or(B2) there is a sequence uk of critical points of the functional
Φ + λΨ such that limk→∞Ψ(uk) = +∞.
In order to prove Theorem 1.16, we recall without proof a topologicalresult of Ricceri [256].

28 Variational Principles
Theorem 1.17 Let X be a topological space, and let Φ,Ψ : X → R betwo sequentially lower semi-continuous functions. Denote by I the setof all s > inf
XΨ such that the set Ψs := u ∈ X : Ψ(u) < s is contained
in some sequentially compact subset of X. Assume that I 6= ∅. For eachs ∈ I, denote by Fs the family of all sequentially compact subsets of X
containing Ψs, and put
α(s) = supK∈Fs
infK
Φ.
Then, for each s ∈ I and each λ satisfying
λ > infu∈Ψs
Φ(u)− α(s)s−Ψ(u)
the restriction of the function Φ + λΨ to Ψs has a global minimum.
Proof of Theorem 1.16. Endowing the space X with the weak topol-ogy, it is easy to verify that clwΨs is the smallest sequentially weaklycompact subset of X containing the set Ψs. Due to this observation, wealso have that the function α and the interval I from Theorem 1.17 havethe form α(s) = infu∈clwΨs Φ(u) and I =] infX Ψ,∞[, respectively.
(A) We assume that δ < +∞; let λ > δ. We may choose a sequencesk ⊂ I with the properties that lim
k→∞sk = inf
XΨ and
λ > infu∈Ψsk
Φ(u)− α(sk)sk −Ψ(u)
for all k ∈ N. Thanks to Theorem 1.17, for each k ∈ N, the restriction ofΦ + λΨ to Ψsk
has a global minimum in the weak topology; we denoteit by uk. Consequently, uk ∈ Ψsk
is a local minimum of Φ + λΨ inthe strong topology too. Moreover, if s = maxk∈N sk, we clearly havethat uk ⊂ Ψs. On the other hand, the set Ψs is contained in asequentially compact subset of X. Therefore, the sequence uk admitsa subsequence, denoted in the same way, which converges weakly to anelement u ∈ X. We claim that u is a global minimum of Ψ. Indeed,since Ψ is sequentially weakly lower semi-continuous, we have that
Ψ(u) ≤ lim infk→∞
Ψ(uk) ≤ limk→∞
sk = infX
Ψ.
Taking a subsequence if necessary, we have that
limk→∞
Ψ(uk) = Ψ(u) = infX
Ψ.
Now, if u = uk for some k ∈ N then (A1) holds; otherwise, we have(A2).

1.4 Ricceri’s variational results 29
(B) We assume that γ < +∞; let λ > γ. We fix a sequence sk ⊂ I
with the properties that limk→∞
sk = +∞ and
λ > infu∈Ψsk
Φ(u)− α(sk)sk −Ψ(u)
for all k ∈ N. Due to Theorem 1.17, for each k ∈ N, there exists uk ∈ Ψsk
such that
Φ(uk) + λΨ(uk) = minΨsk
(Φ + λΨ). (1.26)
We have basically two different cases.When lim
k→∞Ψ(uk) = ∞, the proof is complete, since every set Ψsk
is
open, thus uk are different critical points of Φ+λΨ, that is, (B2) holds.Now, we suppose that lim inf
k→∞Ψ(uk) < ∞. Let us fix the number
r = maxinfX Ψ, lim infk→∞
Ψ(uk). For k ∈ N large enough, we clearly have
that uk ⊂ Ψr+1. In particular, since Ψr+1 is contained in a sequentiallycompact subset of X, the sequence uk admits a subsequence, denotedin the same way, converging weakly to an element u ∈ X. We claim thatu is a global minimum of Ψ. To see this, we fix v ∈ X. Since sk tendsto +∞, there exists k0 ∈ N such that Ψ(v) < sk0 , that is, v ∈ Ψsk0
. Dueto the sequentially weakly lower semi-continuity of Φ + λΨ (note thatλ ≥ 0), relation (1.26), we have that
Φ(u) + λΨ(u) ≤ lim infk→∞
(Φ(uk) + λΨ(uk) ≤ Φ(uk0) + λΨ(uk0)
= minΨsk0
(Φ + λΨ) ≤ Φ(v) + λΨ(v).
Consequently, u ∈ X is a global minimum of Φ+λΨ, that is, (B1) holds.This completes the proof of Theorem 1.16.
The general variational principle of Ricceri (Theorem 1.16) impliesimmediately the following assertion: if Φ and Ψ are two sequentiallyweakly lower semi-continuous functionals on a reflexive Banach spaceX and if Ψ is also continuous and coercive, then the functional Ψ + λΦhas at least one local minimum for each λ > 0 small enough.
A deep topological argument developed by Ricceri [260] shows a moreprecise conclusion. We present here this result without proof.
Theorem 1.18 Let X be a separable and reflexive real Banach space,and let Φ, Ψ : X → R be two sequentially weakly lower semi-continuousand continuously Gateaux differentiable functionals, with Ψ coercive.Assume that the functional Ψ+λΦ satisfies the (PS)-condition for every

30 Variational Principles
λ > 0 small enough and that the set of all global minima of Ψ has atleast k connected components in the weak topology, with k ≥ 2.
Then, for every s > infX Ψ, there exists λ > 0 such that for everyλ ∈]0, λ[, the functional Ψ + λΦ has at least k + 1 critical points, k ofwhich are lying in the set Ψs = u ∈ X : Ψ(u) < s.
Remark 1.4 The first k critical points of Ψ + λΦ are actually localminima of the same functional which belong to the level set Ψs while the(k + 1)th critical point is of mountain pass type where the assumptionof the (PS)-condition is exploited. The mountain pass type point islocated by means of the classification result of Ghoussoub-Preiss [128].
1.5 H1 versus C1 local minimizers
The result contained in this section establishes a surprising property oflocal minimizers, due to H. Brezis and L. Nirenberg [51].
Let Ω be a bounded open set in RN with smooth boundary. Assumethat f : Ω× R→R is a Lipschitz continuous function in u, uniformly inx such that for all (x, u) ∈ Ω× R,
|f(x, u)| ≤ C(1 + |u|p) , (1.27)
where 1 < p ≤ (N + 2)/(N − 2). We point out that the exponent p canattain the critical Sobolev exponent (N + 2)/(N − 2). Set F (x, u) :=∫ u
0f(x, s) ds and define on H1
0 (Ω) the energy functional
E(u) :=12
∫
Ω
|∇u|2 dx−∫
Ω
F (x, u) dx .
Definition 1.4 We say that u0 ∈ C10 (Ω) is a local minimizer of E in
the C1 topology if there exists r > 0 such that
E(u0) ≤ E(u) for every u ∈ C10 (Ω) with ‖u− u0‖C1 ≤ r.
We say that u0 ∈ H10 (Ω) is a local minimizer of E in the H1
0 topologyif there exists ε0 > 0 such that
E(u0) ≤ E(u) for every u ∈ H10 (Ω) with ‖u− u0‖H1 ≤ ε0.
The main result of this section is the following.
Theorem 1.19 Any local minimizer of E in the C1 topology is also alocal minimizer of E in the H1
0 topology.

1.5 H1 versus C1 local minimizers 31
Proof We can assume without loss of generality that 0 is a local mini-mizer of E in the C1 topology.
Subcritical case: p < (N + 2)/(N − 2). Arguing by contradiction, wededuce that for any ε > 0, there exists uε ∈ H1
0 (Ω) such that
‖uε‖H1 ≤ ε and E(uε) < E(0) . (1.28)
This enables us to apply a standard lower semi-continuity argumentto deduce that minu∈Bε
E(u) is attained by some point uε, where
Bε := u ∈ H10 (Ω); ‖u‖H1 < ε .
We claim that
uε→0 in C1(Ω).
Thus, by (1.28), we contradict the hypothesis that 0 is a local minimizerof E in the C1 topology.
In order to prove our claim, let µε ≤ 0 be a Lagrange multiplier of thecorresponding Euler equation for uε, that is,
〈E′(uε), v〉H−1,H10
= µε (uε, v)H10
for all v ∈ H10 (Ω).
Therefore∫
Ω
[∇uε · ∇v − f(x, uε)v] dx = µε
∫
Ω
∇uε · ∇v dx for all v ∈ H10 (Ω).
This can be rewritten as
−(1− µε)∆uε = f(x, uε) in Ω. (1.29)
Since uε→0 in H1(Ω) it follows that, in order to deduce our claim, it isenough to apply the Arzela–Ascoli theorem, after observing that
‖uε‖C1,α ≤ C .
This uniform estimate follows by a standard bootstrap argument. In-deed, assuming that uε ∈ Lq1(Ω) for some q1 ≥ 2N/(N − 2), thenf(x, uε) ∈ Lr(Ω), where r = q1/p. Thus, by Schauder elliptic estimates,uε ∈ W 2,r(Ω) ⊂ Lq2(Ω), with
1q2
=p
q1− 2
N,
provided that the right hand-side is positive. In the remaining case wehave uε ∈ Lq(Ω) for any q > 1. Since p < (N + 2)/(N − 2), we deducethat q2 > q1. Starting with q1 = 2N/(N − 2) and iterating this process,we obtain an increasing divergent sequence (qm)m≥1. This shows that

32 Variational Principles
uε ∈ Lq(Ω) for any q > 1. Returning now to (1.29) we deduce that uε ∈W 2,r(Ω) for any r > 1. Thus, by Sobolev embeddings, uε ∈ C1,α(Ω)for any α ∈ (0, 1). This concludes the proof in the subcritical casecorresponding to p < (N + 2)/(N − 2).
Critical case: p = (N +2)/(N − 2). We argue again by contradiction.Thus, for all ε > 0, there exists uε ∈ H1
0 (Ω) such that relation (1.28)holds. For any positive integer m we define the truncation map
Tm(t) =
−m if t ≤ −m
t if −m ≤ t ≤ m
m if t ≥ m.
For any integer m ≥ 1, define the energy functional
Em(u) :=12
∫
Ω
|∇u|2 dx−∫
Ω
Fm(x, u) dx ,
where fm(x, t) := f(x, Tm(t)) and Fm(x, u) :=∫ u
0fm(x, t) dt.
We first observe that for all u ∈ H10 (Ω), Em(u)→E(u) as m→∞.
Thus, for each ε > 0, there exists an integer m(ε) such that Em(ε)(uε) <
E(0). Let vε ∈ H10 (Ω) be such that
Em(ε)(vε) = minu∈Bε
Eε(u) .
Therefore
Em(ε)(vε) ≤ Em(ε)(uε) < E(0) .
We claim that vε ∈ C10 (Ω) and that vε→0 in C1(Ω). The, if ε > 0 is
sufficiently small, we have
E(vε) = Em(ε)(vε) < E(0) ,
which contradicts our assumption that 0 is a local minimizer of E in theC1 topology.
Returning to the proof of our claim, we observe that vε satisfies theEuler equation
−(1− µε)∆vε = fm(x, vε) , (1.30)
where
|fm(x, u)| ≤ C (1 + |u|p) (1.31)
with p = (N + 2)/(N − 2) and C not depending on m. Since vε→0 inH1
0 (Ω) ⊂ L2N/(N−2)(Ω), Theorem IV.9 in [46] implies that there exists

1.5 H1 versus C1 local minimizers 33
h ∈ L2N/(N−2)(Ω) such that, up to a subsequence still denoted by (vε),we have |vε| ≤ h in Ω. Thus, by relation (1.31),
|fm(x, vε)| ≤ C (1 + a |vε|)
with a = h4/(N−2) ∈ LN/2(Ω). Using a bootstrap argument as in theproof of the subcritical case p < (N + 2)/(N − 2), we deduce that (vε)is bounded in Lq(Ω), for any 1 < q < ∞. Returning now to relation(1.30) and using (1.31) we obtain that (vε) is bounded in C1,α(Ω) forany α ∈ (0, 1). Now, since vε→0 in H1
0 (Ω), the Arzela–Ascoli theoremimplies that vε→0 in C1,α(Ω). This concludes our proof.
1.5.1 Application to sub and supersolutions
Consider the nonlinear elliptic problem −∆u = f(x, u) in Ω
u = 0 on ∂Ω ,(1.32)
where f : Ω × R→R is a Lipschitz continuous function in u, uniformlyin x.
The method of sub and supersolutions is a very useful tool in nonlinearanalysis which asserts that if u, u ∈ C2(Ω) ∩ C1(Ω) satisfy u ≤ u and
−∆u− f(x, u) ≤ 0 ≤ −∆u− f(x, u) in Ωu ≤ 0 ≤ u on ∂Ω ,
(1.33)
then problem (1.32) has at least a solution. The standard proof ofthis result relies on the maximum principle. By means of Theorem1.19 we are able to give a variational proof to the following qualitativeresult which guarantees the existence of a local minimizer between asubsolution and a supersolution.
Theorem 1.20 Assume that functions u, u ∈ C2(Ω)∩C1(Ω) with u ≤ u
satisfy (1.33). In addition, we suppose that neither u nor u is a solutionof (1.32). Then there exists a solution u0 of problem (1.32) such thatu < u0 < u in Ω and u0 is a local minimum of the associated energyfunctional E in H1
0 (Ω), where
E(u) :=12
∫
Ω
|∇u|2 dx−∫
Ω
F (x, u) dx .

34 Variational Principles
Proof Define the truncated continuous function
f0(x, t) :=
f(x, u(x)) if t < u(x)f(x, t) if u(x) ≤ t ≤ u(x)f(x, u(x)) if t > u(x) .
Set F0(x, u) :=∫ u
0f0(x, t) dt and
E0(u) :=12
∫
Ω
|∇u|2 dx−∫
Ω
F0(x, u) dx .
Then f0 is bounded on Ω × R, hence E0 is bounded from belowon H1
0 (Ω). Thus, by semi-continuity arguments, infu∈H10 (Ω) E0(u) is
achieved at some point u0 and
−∆u0 = f0(x, u0) in Ω.
Bootstrap techniques (as developed in the proof of Theorem 1.19) implythat u0 ∈ W 2,p(Ω) for any p < ∞. So, by Sobolev embeddings, u0 ∈C1,α(Ω) for all α ∈ (0, 1).
Next, we prove that u < u0 < u in Ω. Indeed, multiplying by (u−u0)+
the inequality
−∆(u− u0) ≤ f(x, u)− f(x, u0)
and integrating on Ω, we find (u − u0)+ = 0. Thus, u ≤ u − 0 in Ω.In fact, the strong maximum principle implies that this inequality isstrict. With a similar argument we deduce that u0 < u in Ω. Using nowu < u0 < u and applying again the strong maximum principle, we findε.0 such that for all x ∈ Ω,
u(x) + εdist (x, ∂Ω) ≤ u0(x) ≤ u(x)− εdist (x, ∂Ω) .
We observe that the mapping [u(x), u(x)] 3 x 7−→ F0(x, u) − F (x, u)is a function depending only on x. This shows that E(u) − E0(u) isconstant, provided that ‖u−u0‖C1 is small enough. Since u0 is a globalminimum of E0, we deduce that u0 is a local minimum of E on C1
0 (Ω).Using now Theorem 1.19 we conclude that u0 is also a local minimumof E in H1
0 (Ω).
1.6 Szulkin type functionals
Let X be a real Banach space and X? its dual and we denote by 〈·, ·〉the duality pair between X and X?. Let E : X → R be a functionalof class C1 and let ζ : X → R ∪ +∞ be a proper (that is, 6≡ +∞),

1.6 Szulkin type functionals 35
convex, lower semi-continuous function. Then, I = E + ζ is a Szulkin-type functional, see Szulkin [282]. An element u ∈ X is called a criticalpoint of I = E + ζ if
〈E′(u), v − u〉+ ζ(v)− ζ(u) ≥ 0 for all v ∈ X. (1.34)
The number I(u) is a critical value of I.For u ∈ D(ζ) = u ∈ X : ζ(u) < ∞ we consider the set
∂ζ(u) = x? ∈ X? : ζ(v)− ζ(u) ≥ 〈x?, v − u〉, ∀ v ∈ X .The set ∂ζ(u) is called the subdifferential of ζ at u. Note that an equiv-alent formulation for (1.34) is
0 ∈ E′(u) + ∂ζ(u) in X?. (1.35)
Proposition 1.3 Every local minimum point of I = E + ζ is a criticalpoint of I in the sense of (1.34).
Proof Let u ∈ D(ζ) be a local minimum point of I = E + ζ. Due to theconvexity of ζ, for every t > 0 small we have
0 ≤ I((1− t)u + tv)− I(u) ≤ E(u + t(v − u))− E(u) + t(ζ(v)− ζ(u)).
Dividing by t > 0 and letting t → 0+, we obtain (1.34).
Definition 1.5 The functional I = E + ζ satisfies the Palais-Smalecondition at level c ∈ R, (shortly, (PSZ)c-condition) if every sequenceun ⊂ X such that limn→∞ I(un) = c and
〈E′(un), v − un〉X + ζ(v)− ζ(un) ≥ −εn‖v − un‖ for all v ∈ X,
where εn → 0, possesses a convergent subsequence.
Remark 1.5 When ζ = 0, (PSZ)c-condition is equivalent to the stan-dard (PS)c-condition.
1.6.1 Minimax results of Szulkin type
Theorem 1.21 Let X be a Banach space, I = E + ζ : X → R ∪ +∞a Szulkin-type functional and we assume that
(i) I(u) ≥ α for all ‖u‖ = ρ with α, ρ > 0, and I(0) = 0;(ii) there is e ∈ X with ‖e‖ > ρ and I(e) ≤ 0.

36 Variational Principles
If I satisfies the (PSZ)c-condition for
c = infγ∈Γ
maxt∈[0,1]
I(γ(t)),
Γ = γ ∈ C([0, 1], X) : γ(0) = 0, γ(1) = e,then c is a critical value of I and c ≥ α.
Theorem 1.22 Let X be a separable and reflexive Banach space, letI1 = E1 + ζ1 Szulkin-type functionals and I2 = E2 : X → R a functionof class C1 and let Λ ⊆ R be an interval. Suppose that
(i) E1 is weakly sequentially lower semi-continuous and E2 is weaklysequentially continuous;
(ii) for every λ ∈ Λ the function I1 + λI2 fulfils (PSZ)c, c ∈ R, with
lim‖u‖→+∞
(I1(u) + λI2(u)) = +∞;
(iii) there exists a continuous concave function h : Λ → R satisfying
supλ∈Λ
infu∈X
(I1(u)+λI2(u)+h(λ)) < infu∈X
supλ∈Λ
(I1(u)+λI2(u)+h(λ)).
Then there is an open interval Λ0 ⊆ Λ, such that for each λ ∈ Λ0 thefunction I1 + λI2 has at least three critical points in X.
In the next, we give a variant of Ricceri variational principle forSzulkin type functionals which will be used in the study of the exis-tence of scalar systems.
Suppose now that X and Y are real Banach spaces such that X iscompactly embedded in Y . Let E1 : Y → R and E2 : X → R be C1
functions, and let ζ1 : X →] − ∞, +∞] be convex, proper, and lowersemi-continuous. Define the maps I1 : X →]−∞, +∞] and I2 : X → Ras
I1(u) = E1(u) + ζ1(u), I2(u) = E2(u), for all x ∈ X.
Denote by D(ζ1) := u ∈ X | ζ1(u) < +∞ and assume that
I−12 (]−∞, ρ[) ∩D(ζ1) 6= ∅, for all ρ > inf
XI2. (1.36)
For every ρ > infX
I2 put
ϕ(ρ) := infu∈Ψ−1(]−∞,ρ[)
Φ(u)− infv∈(I−1
2 (]−∞,ρ[))w
Φ(v)
ρ− I2(u), (1.37)

1.6 Szulkin type functionals 37
where (I−12 (]−∞, ρ[))w is the weak closure of I−1
2 (]−∞, ρ[),
γ := lim infρ→+∞
ϕ(ρ), (1.38)
δ := lim infρ→(infX I2)+
ϕ(ρ). (1.39)
Theorem 1.23 Suppose that X is reflexive, I2 is weakly sequentiallylower semi-continuous and coercive, and (1.36) is fulfilled. Then thefollowing assertions hold:
(a) For every ρ > infX
I2 and every λ > ϕ(ρ) the function I1 + λI2
has a critical point (more exactly: a local minimum) lying inI−12 (]−∞, ρ[) ∩D(ζ1).
(b) If γ < +∞ then, for each λ > γ, either
(b1) I1 + λI2 has a global minimum, or(b2) there is a sequence un of critical points (more exactly: local
minima) of I1+λI2 lying in D(ζ1) and such that limn→∞ I2(un) =+∞.
(c) If δ < +∞ then, for every λ > δ, either
(c1) I1 + λI2 has a local minimum which is also a global minimumof I2, or
(c2) there is a sequence un of pairwise distinct critical points(more exactly: local minima) of I1 + λI2 lying in D(ζ1) andsuch that un converges weakly to a global minimum of I2
and limn→∞ I2(un) = infX
I2.
1.6.2 Principle of symmetric criticality
The principle of symmetric criticality plays a central role in many prob-lems from the differential geometry, physics and in partial differentialequations. First it was proved by Palais [232] for functionals of classC1. In this subsection we recall this principle for functionals of classC1 defined on Banach spaces and we state its version for Szulkin typefunctionals, based on the paper of Kobayashi-Otani [158].
Let X be a Banach space and let X? its dual. The norms of X andX? will be denoted by ‖ · ‖ and ‖ · ‖?, respectively. We shall denote by〈·, ·, 〉 the duality pairing between X and X?.
Let G be a group, e its identity element, and let π a representation of

38 Variational Principles
G over X, that is π(g) ∈ L(X) for each g ∈ G (where L(X) denotes theset of the linear and bounded operator from X into X), and
a) π(e)u = u, ∀ u ∈ X;b) π(g1g2)u = π(g1)(π(g2u)), ∀ g1, g2 ∈ G and u ∈ X.
The representation π? of G over X? is naturally induced by π by therelation
〈π?(g)v?, u〉 = 〈v?, π(g−1)u〉,∀ g ∈ G, v? and u ∈ X. (1.40)
We often write gu or gv? instead of π(g)u or π?(g)v?, respectively.A function h : X → R (respectively, h : X? → R) is called G-invariant
if h(gu) = h(u) (respectively, h(gu?) = h(u?)) for every u ∈ X (respec-tively, u? ∈ X?) and g ∈ G. A subset M of X is called G-invariant(respectively, M? of X?) if
gM = gu : u ∈ M ⊆ M (respectively, gM? ⊆ M?) ∀ g ∈ G.
The fixed point sets of the group action G on X and X? (some authorscall them G-symmetric points) are defined as
Σ = XG = u ∈ X : gu = u ∀ g ∈ G,
Σ? = (X?)G = v? ∈ X? : gv? = v? ∀ g ∈ G.Hence, by (1.40), we can see that v? ∈ X? is symmetric if and only
if v? is a G-invariant functional. The sets Σ and Σ? are closed linearsubspaces of X and X?, respectively. So Σ and Σ? are regarded asBanach spaces with their induced topologies. We introduce the notation
C1G(X) = f : X → R : f is G− invariant and of class C 1.
We consider the following statement, called as principle of symmetriccriticality (shortly, (PSC)):
• If f ∈ C1G(X) and (f |Σ)′(u) = 0, then f ′(u) = 0.
Theorem 1.24 (PSC) is valid if and only if Σ? ∩ Σ⊥ = 0, whereΣ⊥ = v? ∈ X? : 〈v?, u〉 = 0, ∀ u ∈ Σ.
Proof ” ⇒ ” Suppose that Σ? ∩ Σ⊥ = 0 and let u0 ∈ Σ be a crit-ical point of f |Σ. We show that f ′(u0) = 0. Since f(u0) = f |Σ(u0)and f(u0 + v) = f |Σ(u0 + v) for all v ∈ Σ, we obtain 〈f ′(u0), v〉 =

1.6 Szulkin type functionals 39
〈(f |Σ)′(u0), v〉Σ for every v ∈ Σ, where 〈·, ·〉Σ denotes the duality pair-ing between Σ and its dual Σ?. This implies that f ′(u0) ∈ Σ⊥. On theother hand, from the G-invariance of f follows that
〈f ′(gu), v〉 = limt→0
f(gu + tv)− f(gu)t
= limt→0
f(u + tg−1v)− f(u)t
= 〈f ′(u), g−1v〉 = 〈gf ′(u), v〉for all g ∈ G and u, v ∈ X. This means that f ′ is G-equivariant, thatis, f ′(gu) = gf ′(u) for every g ∈ G and u ∈ X. Since u0 ∈ Σ, we obtaingf ′(u0) = f ′(u0) for all g ∈ G, that is, f ′(u0) ∈ Σ?. Thus we concludef ′(u0) ∈ Σ? ∩ Σ⊥ = 0. Therefore f ′(u0) = 0.
” ⇐ ” Suppose that there exists a non-zero element v? ∈ Σ? ∩ Σ⊥
and define f?(·) by f?(u) = 〈v?, u〉. It is clear that f? ∈ C1G(X) and
(f?)′(·) = v? 6= 0, so f? has no critical point in X. On the other handv? ∈ Σ⊥ implies v?|Σ = 0, thus (f?|Σ)′(u) = 0 for every u ∈ Σ whichcontradicts (PSC).
In the sequel, we are interested to find conditions in order to haveΣ? ∩ Σ⊥ = 0, that is, (PSC) to be verified. There are two ways toachieve this purpose, the so-called “compact” as well as the “isometric”cases. We are dealing now with the first one whose original form hasbeen given by Palais [232].
Theorem 1.25 Let G be a compact topological group and the represen-tation π of G over X is continuous, that is, (g, u) → gu is a continuousfunction G×X into X. Then (PSC) holds.
In order to prove this theorem, we recall that for each u ∈ X, thereexists a unique element Au ∈ X such that
〈v?, Au〉 =∫
G
〈v?, gu〉dg, ∀ v? ∈ X?, (1.41)
where dg is the normalized Haar measure on G. The mapping A : X → Σis called the averaging operator on G.
Proof of Theorem 1.25. On account of Theorem 1.24, it is enough toverify the condition Σ?∩Σ⊥ = 0. Let v? ∈ Σ?∩Σ⊥ fixed and supposethat v? 6= 0. Let us define the hyperplane Hv? = u ∈ X : 〈v?, u〉 = 1which is a non-empty, closed, convex subset of X. For any u ∈ Hv? ,since v? ∈ Σ?, we have
〈v?, Au〉 =∫
G
〈v?, gu〉dg =∫
G
〈g−1v?, u〉dg =∫
G
〈v?, u〉dg =

40 Variational Principles
= 〈v?, u〉∫
G
dg = 〈v?, u〉 = 1.
Note however that v? ∈ Σ⊥, thus 〈v?, Au〉 = 0 for any u ∈ Hv? , contra-diction.
Another possibility for (PSC) to be valid is the following one whichwill be given without proof.
Theorem 1.26 Assume that X is a reflexive and strictly convex Banachspace and G acts isometrically on X, that is, ‖gu‖ = ‖u‖ for all g ∈ G
and u ∈ X. Then (PSC) holds.
We conclude this subsection with a non-smooth version of (PSC). Onaccount of relation (1.35), we are entitled to consider the following formof the principle of symmetric criticality for Szulkin functionals (shortly,(PSCSZ)):
• If I = E +ζ : X → R∪+∞ is a G-invariant Szulkin type functionaland 0 ∈ (E|Σ)′(u) + ∂(ζ|Σ)(u) in Σ? then 0 ∈ E′(u) + ∂ζ(u) in X?.
Although a slightly more general version is proven by Kobayashi-Otani[158], we recall the following form of the principle of symmetric criticalityfor Szulkin functionals which will be applied in the next chapters.
Theorem 1.27 [158, Theorem 3.16] Let X be a reflexive Banach spaceand let I = E + ζ : X → R ∪ +∞ be a Szulkin-type functional onX. If a compact group G acts linearly and continuously on X, and thefunctionals E and ζ are G-invariant, then (PSCSZ) holds.
The proof of Theorem 1.27 is quite involved, it combines in an ingeniousway various methods and notions from convex and functional analysis.The interested reader may consult the paper of Kobayashi-Otani [158].
1.7 Pohozaev’s fibering method
The fibering scheme was introduced by S.I. Pohozaev in [243], [244].Although there are various versions of it, we present the so-called one-parametric fibering method.
Let X be a real Banach space, f : X → R be a functional such thatf is of class C1 on X \ 0. By means of f we define the functionf : (R \ 0)×X → R by
f(λ, v) = f(λv), (λ, v) ∈ (R \ 0)×X. (1.42)

1.7 Pohozaev’s fibering method 41
Let S = u ∈ X : ‖u‖ = 1.
Definition 1.6 A point (λ, v) ∈ (R \ 0) × S is conditionally criticalof the function f if
−f ′(λ, v) ∈ N(R\0)×S(λ, v),
where N(R\0)×S(λ, v) is the normal cone to the set (R\0)×S at thepoint (λ, v).
We have the following result, proved by Pohozaev [244].
Theorem 1.28 Let X be a real Banach space with differentiable normon X \ 0 and let (λ, v) ∈ (R \ 0)×S be a conditionally critical pointof f : (R \ 0)×X → R. Then u = λv ∈ X \ 0 is a critical point off : X → R, that is, f ′(u) = 0.
Proof Due to the hypothesis, we have that
−f ′(λ, v) ∈ N(R\0)×S(λ, v).
On account of Proposition A.2, see Appendix A, we obtain
(−f ′λ(λ, v),−f ′v(λ, v)) ∈ NR\0(λ)×NS(v).
Here, f ′v denotes the differential of f with respect to v in the whole spaceX, while f ′λ is the derivative of f with respect to the variable λ.
Note that NR\0(λ) = 0, thus
f ′λ(λ, v) = 0. (1.43)
Moreover, since TS(v) is a linear space, the condition −f ′v(λ, v) ∈ NS(v)reduces to the fact that
〈f ′v(λ, v), w〉 = 0 for all w ∈ TS(v).
Since TS(v) = Ker‖ · ‖′(v), see Zeidler [296, Theorem 43.C], there areκ, µ ∈ R such that κ2 + µ2 6= 0 and
κf ′v(λ, v) = µ‖ · ‖′(v). (1.44)
From (1.44) it follows that for every v ∈ X,
κ〈f ′v(λ, v), v〉 = µ〈‖ · ‖′(v), v〉. (1.45)
A simple calculation shows that
f ′v(λ, v) = λf ′(λv). (1.46)

42 Variational Principles
Moreover, we have
〈f ′v(λ, v), v〉 = λ〈f ′(λv), v〉 = λf ′λ(λ, v).
Consequently, from (1.45) and the above relation we obtain that
λκf ′λ(λ, v) = µ〈‖ · ‖′(v), v〉 = µ.
From this equality and (1.43) we get µ = 0. Then, we necessarily haveκ 6= 0. Combining (1.44) with (1.46), we have that
λf ′(u) = f ′v(λ, v) = 0
for u = λv. Since λ 6= 0, we obtain f ′(u) = 0 which concludes the proof.
1.8 Historical comments
Ekeland’s variational principle [100] was established in 1974 and is thenonlinear version of the Bishop–Phelps theorem [239, 240], with its mainfeature of how to use the norm completeness and a partial ordering toobtain a point where a linear functional achieves its supremum on aclosed bounded convex set. A major consequence of Ekeland’s varia-tional principle is that even if it is not always possible to minimize anonnegative C1 functional Φ on a Banach space; however, there is al-ways a minimizing sequence (un)n≥1 such that Φ′(un)→0 as n→∞.
Sullivan [281] observed that Ekeland’s variational principle character-izes complete metric spaces in the following sense.
Theorem 1.29 Let (M,d) be a metric space. Then M is complete ifand only if the following holds: For every application Φ : M→(−∞,∞],Φ 6≡ ∞, which is bounded from below, and for every ε > 0, there existszε ∈ M such that
(i) Φ(zε) ≤ infM Φ + ε ;(ii) Φ(x) > Φ(zε)− ε d(x, zε), for any x ∈ M \ zε.The mountain pass theorem was established by Ambrosetti and Ra-
binowitz in [7]. Their original proof relies on some deep deformationtechniques developed by Palais and Smale [231], [234], who put the mainideas of the Morse theory into the framework of differential topology oninfinite dimensional manifolds. In this way, Palais and Smale replacedthe finite dimensionality assumption with an appropriate compactnesshypothesis.

1.8 Historical comments 43
The main underlying ideas of the fibering methods are the following:1. Let X,Y be two real Banach spaces and A : X → Y be a nonlinear
operator. Fix an element h ∈ Y and consider the equation
A(u) = h. (1.47)
We also consider the wider Banach space X, Y such that X ⊂ X andY ⊂ Y . Now let A : X → Y be a nonlinear operator such that A|X = A.Instead of (1.47) we consider the extended equation
A(u) = h. (1.48)
2. We equip X with a nonlinear structure associated to the nonlinearoperator A.
For given spaces X,Y and a nonlinear operator A : X → Y , that is,for the triple (X,A, Y ) we construct a triple (ξ, α, η), where ξ : X → X
and η : Y → Y are fibrations and α = (A, A) : (X, X) → (Y , Y ) is amorphism of fibrations, that is, η A = A ξ. If we take X = Rk ×X,then we obtain the k-parametric fibering methods. If k = 1 we getthe one-parametric fibering methods. The basic idea in one parametricfibering methods is the representation of solutions for A(u) = h in theform
u = tv, (1.49)
where ∈ R \ 0 is a real parameter and v ∈ X \ 0 satisfying thefibering constraint
H(t, v) = c. (1.50)
The function H will be said fibering functional. In particular case, whenH(t, v) ≡ ‖v‖, the condition (1.50) becomes ‖v‖ = 1 and it is calledspherical fibering.

2
Variational Inequalities
Just as houses are made ofstones, so is science made offacts; but a pile of stones isnot a house and a collection offacts is not necessarily science.
Henri Poincare (1854–1912)
2.1 Introduction
The theory of variational inequalities appeared in the middle 1960’s, inconnection with the notion of subdifferential in the sense of convex anal-ysis. All the inequality problems treated to the beginning 1980’s wererelated to convex energy functionals and therefore strictly connectedto monotonicity: for instance, only monotone (possibly multivalued)boundary conditions and stress-strain laws could be studied. Noncon-vex inequality problems first appeared in [203] in the setting of globalanalysis and were related to the subdifferential introduced in [82] (seeMarino [202] for a survey of the developments in this direction). A typ-ical feature of nonconvex problems is that, while in the convex case thestationary variational inequalities give rise to minimization problems forthe potential or for the energy, in the nonconvex case the problem of thestationarity of the potential emerges and therefore it becomes reasonableto expect results also in the line of critical point theory.
2.2 Variational inequalities on Ω = ω × Rl
44

2.2 Variational inequalities on Ω = ω × Rl 45
2.2.1 Case l ≥ 2
Let Ω = ω × Rl be an unbounded strip (or, in other words, a strip-likedomain), where ω ⊂ Rm is open bounded, and l ≥ 2, m ≥ 1. Letf : Ω × R → R be a continuous function, which satisfies the followingcondition:(f1) there exist c1 > 0 and p ∈ (2, 2?) such that
|f(x, s)| ≤ c1(|s|+ |s|p−1), for every (x, s) ∈ Ω× R.
Here, we denoted by 2∗ = 2(m + l)(m + l − 2)−1 the critical Sobolevexponent.
As usual, H10 (Ω) is the Sobolev space endowed with the inner prod-
uct
〈u, v〉H10
=∫
Ω
∇u∇vdx
and norm ‖·‖H10
=√〈·, ·〉H1
0, while the norm of Lα(Ω) will be denoted by
‖ · ‖α. It is well-known that the embedding H10 (Ω) → Lα(Ω), α ∈ [2, 2∗],
is continuous, that is, there exists kα > 0 such that ‖u‖α ≤ kα‖u‖H10
forevery u ∈ H1
0 (Ω).Consider finally the closed convex cone
K = u ∈ H10 (Ω) : u ≥ 0 a.e. in Ω.
The aim of this section is to study the following (eigenvalue) problemfor variational inequality (denoted by (P)):
Find (u, λ) ∈ K × (0,∞) such that∫
Ω
∇u(x)(∇v(x)−∇u(x))dx− λ
∫
Ω
f(x, u(x))(v(x)− u(x))dx ≥ 0, ∀v ∈ K.
We say that a function h : Ω → R is axially symmetric, if h(x, y) =h(x, gy) for all x ∈ ω, y ∈ Rl and g ∈ O(l). In particular, we denote byH1
0,s(Ω) the closed subspace of axially symmetric functions of H10 (Ω).
Define F : Ω× R→ R by F (x, s) =∫ s
0
f(x, t)dt and beside of (f1), we
make the following assumptions:
(f2) lims→0
|f(x, s)|s
= 0 uniformly for every x ∈ Ω.

46 Variational Inequalities
(f3) There exist q ∈]0, 2[, ν ∈ [2, 2?], α ∈ Lν/(ν−q)(Ω), β ∈ L1(Ω) suchthat
F (x, s) ≤ α(x)|s|q + β(x).
(f4) There exists u0 ∈ H10,s(Ω) ∩ K such that
∫
Ω
F (x, u0(x))dx > 0.
The main result of this section can be formulated as follows.
Theorem 2.1 Let f : Ω : R→ R be a continuous function which satisfies(f1)-(f4) and F (·, s) is axially symmetric for every s ∈ R. Then thereis an open interval Λ0 ⊂ (0,∞) such that for every λ ∈ Λ0 there areat least three distinct elements uλ
i ∈ K (i ∈ 1, 2, 3) which are axiallysymmetric, having the property that (uλ
i , λ) are solutions of (P) for everyi ∈ 1, 2, 3.
From now on, we assume that the hypotheses of Theorem 2.1 arefulfilled. Before to prove Theorem 2.1, some preliminary results will begiven.
Remark 2.1 For every ε > 0 there exists c(ε) > 0 such that
(i) |f(x, s)| ≤ ε|s|+ c(ε)|s|p−1 for every (x, s) ∈ Ω× R.
(ii) |F (x, s)| ≤ εs2 + c(ε)|s|p for every (x, s) ∈ Ω× R.
Let us define F : H10 (Ω) → R by F(u) =
∫
Ω
F (x, u(x))dx. From condi-
tion (f1) follows that F is of class C1 and F ′(u)(v) =∫
Ω
f(x, u(x))v(x)dx.
We consider the indicator function of the set K, ζK : H10 (Ω) →] −
∞,∞], i.e.,
ζK(u) =
0, if u ∈ K+∞, if u /∈ K,
which is clearly convex, proper and lower semi-continuous. Moreover,define for λ > 0 the function Iλ : H1
0 (Ω) →]−∞,∞] by
Iλ(u) =12‖u‖2H1
0− λF(u) + ζK(u). (2.1)
It is easily seen that Iλ is a Szulkin-type functional. Furthermore, onehas
Remark 2.2 If u ∈ H10 (Ω) is a critical point of Iλ, then (u, λ) is a
solution of (P).

2.2 Variational inequalities on Ω = ω × Rl 47
Let G = idRm × O(l) ⊂ O(m + l). Define the action of G on H10 (Ω)
by gu(x) = u(g−1x) for every g ∈ G, u ∈ H10 (Ω) and x ∈ Ω. Since K
is a G-invariant set, then ζK is a G-invariant function. Since F (·, s) isaxially symmetric for every s ∈ R, then F is also a G-invariant function.The norm ‖ · ‖H1
0is a G-invariant function as well. In conclusion, if we
consider the set
Σ = H10,s(Ω) = u ∈ H1
0 (Ω) : gu = u for every g ∈ G,
then, in view of Theorem 1.27, every critical point of Iλ|Σ becomes aswell critical point of Iλ.
We will apply Theorem 1.22
X = Σ = H10,s(Ω), E1 =
12‖ ·‖2Σ, ζ1 = ζK|Σ, E2 = −F|Σ, Λ = [0,∞[.
As usual, ‖ · ‖Σ, ζK|Σ and F|Σ denote the restrictions of ‖ · ‖H10, ζK and
F to Σ, respectively. We will use also the notation 〈·, ·〉Σ for the restric-tion of 〈·, ·〉H1
0to Σ and also we denote by 〈·, ·〉Σ the duality mapping
restricted to Σ× Σ?.Now, we are going to verify the hypotheses (i)-(iii) of Theorem 1.22.
Step 1. (Verification of (i)). The weakly sequentially lower semi-continuity of E1 is standard. We prove that E2 is weakly sequentiallycontinuous.
Let un be a sequence from Σ which converges weakly to someu ∈ Σ. In particular, un is bounded in Σ and by virtue of Lemma 2.1,F (x, s) = o(s2) as s → 0, and F (x, s) = o(s2∗) as s → +∞, uniformlyfor every x ∈ Ω. But, from [107, Lemma 4, p. 368] follows that E2(un) →E2(u) as n →∞, that is, E2 is weakly sequentially continuous.
Step 2. (Verification of (ii)). Fix λ ∈ Λ. First, we will prove thatI1 + λI2 ≡ E1 + ζ1 + λE2 is coercive. Indeed, due to (f3), by Holder’sinequality we have for every u ∈ Σ that
I1(u) + λI2(u) ≥ 12‖u‖2Σ − λ
∫
Ω
α(x)|u(x)|qdx− λ
∫
Ω
β(x)dx
≥ 12‖u‖2Σ − λ‖α‖ν/(ν−q)k
qν‖u‖q
Σ − λ‖β‖1.
Since q < 2, it is clear that ‖u‖Σ → +∞ implies I1(u) + λI2(u) → +∞,
as claimed.

48 Variational Inequalities
Now, we will prove that I1 +λI2 verifies (PSZ)c, c ∈ R. Let un ⊂Σ be a sequence such that
I1(un) + λI2(un) → c (2.2)
and for every v ∈ Σ we have
〈un, v−un〉Σ+λ〈E′2(un), v−un〉Σ+ζ1(v)−ζ1(un) ≥ −εn‖v−un‖Σ, (2.3)
for a sequence εn in [0,+∞[ with εn → 0. In particular, (2.2) showsthat un ⊂ K. Moreover, the coerciveness of the function I1 + λI2
implies that the sequence un is bounded in Σ ∩ K. Therefore, thereexists an element u ∈ K∩Σ such that un converges weakly to u in Σ.
(Note that K is convex and closed, thus, weakly closed.) Moreover, sincethe embedding Σ → Lp(Ω) is compact (see [107]), up to a subsequence,un converges strongly to u in Lp(Ω). Choosing in particular v = u in(2.3), we have
‖un − u‖2Σ ≤ λ〈E′2(un), u− un〉Σ + 〈u, u− un〉Σ + εn‖u− un‖Σ.
The last two terms tend to zero as n → ∞. Thus, in order to prove‖un − u‖Σ → 0, it is enough to show that the first term in the righthand side tends to zero as well. From Remark 2.1 a), we obtain
〈E′2(un), u− un〉Σ =
∫
Ω
f(x, un(x))(−u(x) + un(x))dx
≤∫
Ω
[ε|un(x)|+ c(ε)|un(x)|p−1
] |un(x)− u(x)|dx
≤ εk22‖un‖Σ‖un − u‖Σ + c(ε)‖un‖p−1
p ‖un − u‖p.
Due to the arbitrariness of ε > 0, the last term tends to zero, therefore,‖un − u‖Σ → 0 as n →∞.
Step 3. (Verification of (iii)). Let us define the function γ : [0,∞[→ Rby
γ(s) = sup−E2(u) : ‖u‖2Σ ≤ 2s.Due to Remark 2.1 (ii), one has
γ(s) ≤ 2εk22s + 2pc(ε)kp
psp2 .
On the other hand, we know that γ(s) ≥ 0 for s ≥ 0. Due to thearbitrariness of ε > 0, we deduce
lims→0+
γ(s)s
= 0.

2.2 Variational inequalities on Ω = ω × Rl 49
By (f4) it is clear that u0 6= 0 (E2(0) = 0). Therefore it is possible tochoose a number η such that
0 < η < −2E2(u0)‖u0‖−2Σ .
From lims→0+
γ(s)/s = 0 follows the existence of a number s0 ∈]0, ‖u0‖2Σ/2[
such that γ(s0) < ηs0. Therefore,
γ(s0) < −2E2(u0)‖u0‖−2Σ s0.
Choose ρ0 > 0 such that
γ(s0) < ρ0 < −2E2(u0)‖u0‖−2Σ s0. (2.4)
Due to the choice of t0 and (2.4) we have
ρ0 < −E2(u0). (2.5)
Define h : Λ = [0, +∞[→ R by h(λ) = ρ0λ. We prove that thefunction h satisfies the inequality
supλ∈Λ
infu∈Σ
(I1(u) + λI2(u) + ρ0λ) < infu∈Σ
supλ∈Λ
(I1(u) + λI2(u) + ρ0λ).
Note, that in the previous inequality we can put Σ ∩ K instead of Σ;indeed, if u ∈ Σ \ K, then I1(u) = +∞.
The function
Λ 3 λ 7→ infu∈Σ∩K
[‖u‖2Σ/2 + λ(ρ0 + E2(u))]
is upper semi-continuous on Λ. Relation (2.5) implies that
limλ→+∞
infu∈Σ∩K
[I1(u) + λI2(u) + ρ0λ] ≤ limλ→+∞
[‖u0‖2Σ/2 + λ(ρ0 + E2(u0))]
= −∞.
Thus we find an element λ ∈ Λ such that
supλ∈Λ
infu∈Σ∩K
(I1(u) + λI2(u) + ρ0λ) = infu∈Σ∩K
[‖u‖2Σ/2 + λ(ρ0 + E2(u))].
(2.6)Since γ(s0) < ρ0, for all u ∈ Σ such that ‖u‖2Σ ≤ 2s0, we have
E2(u) > −ρ0. Thus, we have
s0 ≤ inf‖u‖2Σ/2 : E2(u) ≤ −ρ0 ≤ inf‖u‖2Σ/2 : u ∈ K, E2(u) ≤ −ρ0.(2.7)
On the other hand
infu∈Σ∩K
supλ∈Λ
(I1(u)+λI2(u)+ρ0λ) = infu∈Σ∩K
[‖u‖2Σ/2 + sup
λ∈Λ(λ(ρ0 + E2(u)))
]

50 Variational Inequalities
= infu∈Σ∩K
‖u‖2Σ/2 : E2(u) ≤ −ρ0
.
Therefore, relation (2.7) can be written as
s0 ≤ infu∈Σ∩K
supλ∈Λ
(I1(u) + λI2(u) + ρ0λ). (2.8)
There are two distinct cases:(A) If 0 ≤ λ < s0/ρ0, we have
infu∈Σ∩K
[‖u‖2Σ/2 + λ(ρ0 + E2(u))] ≤ λ(ρ0 + E2(0)) = λρ0 < s0.
Combining this inequality with (2.6) and (2.8) we obtain the desiredinequality.
(B) If s0/ρ0 ≤ λ, from ρ0 < −E2(u0) and (2.4) follows
infu∈Σ∩K
[‖u‖2Σ/2 + λ(ρ0 + E2(u))] ≤ ‖u0‖2Σ/2 + λ(ρ0 + E2(u0))
≤ ‖u0‖2Σ/2 + s0(ρ0 + E2(u0))/ρ0 < s0.
Now, we will repeat the last part of (A), which concludes Step 3.
Proof of Theorem 2.1. Due to the above three steps, Theorem 1.22implies the existence of an open interval Λ0 ⊂ [0,∞[, such that for eachλ ∈ Λ0, the function Iλ|Σ ≡ I1 + λI2 has at least three critical points inΣ ∩ K. It remains to apply Theorem 1.27 and Remark 2.2. ¤
2.2.2 Case l = 1
In this section we will continue our studies on the strip-like domains,but contrary to the previous section, we consider domains of the formΩ = ω × R, where ω ⊂ Rm(m ≥ 1) is a bounded open subset.
J.-L. Lions [98] observed that defining the closed convex cone
K = u ∈ H10 (ω × R) : u is nonnegative,
y 7→ u(x, y) is nonincreasing for x ∈ ω, y ≥ 0, andy 7→ u(x, y) is nondecreasing for x ∈ ω, y ≤ 0,
(K)the bounded subsets of K are relatively compact in Lp(ω×R) wheneverp ∈ (2, 2∗). Note that 2? = ∞, if m = 1.
The main goal of this section is to give a new approach to treat elliptic(eigenvalue) problems on domains of the type Ω = ω × R. The genesisof our method relies on the Szulkin-type functionals. Indeed, since the

2.2 Variational inequalities on Ω = ω × Rl 51
indicator function of a closed convex subset of a vector space (so, inparticular K in H1
0 (ω×R)) is convex, lower semi-continuous and proper,this approach arises in a natural manner. In order to formulate ourproblem, we shall consider a continuous function f : (ω × R) × R → Rsuch that
(F1) f(x, 0) = 0, and there exist c1 > 0 and p ∈ (2, 2∗) such that
|f(x, s)| ≤ c1(|s|+ |s|p−1), ∀ (x, s) ∈ (ω × R)× R.
Let a ∈ L1(ω×R)∩L∞(ω×R) with a ≥ 0, a 6≡ 0, and q ∈ (1, 2). Forλ > 0, we denote by (Pλ) the following variational inequality problem:Find u ∈ K such that∫
ω×R∇u(x)∇(v(x)− u(x))dx +
∫
ω×Rf(x, u(x))(−v(x) + u(x))dx
≥ λ
∫
ω×Ra(x)|u(x)|q−2u(x)(v(x)− u(x))dx, ∀v ∈ K.
For the sake of notation, we introduce Ω = ω × R.
Define F : Ω × R → R by F (x, s) =∫ s
0
f(x, t)dt and beside of (F1)
we make the following assumptions:
(F2) lims→0
f(x, s)s
= 0 uniformly for every x ∈ Ω;
(F3) There exists ν > 2 such that
νF (x, s)− sf(x, s) ≤ 0, ∀(x, s) ∈ Ω× R;
(F4) There exists R > 0 such that
infF (x, s) : (x, |s|) ∈ ω × [R,∞) > 0.
Lemma 2.1 If the functions f, F : Ω× R→ R satisfies (F1), (F3) and(F4) then there exist c2, c3 > 0 such that
F (x, s) ≥ c2|s|ν − c3s2, ∀(x, s) ∈ Ω× R.
Proof First, for arbitrary fixed (x, u) ∈ Ω× R we consider the functiong : (0,+∞) → R defined by
g(s) = s−νF (x, su).
Clearly, g is a function of class C1 and we have
g′(s) = −νs−ν−1F (x, su) + s−νuf(x, su), s > 0.

52 Variational Inequalities
Let s > 1 and by mean value theorem, there exist τ = τ(x, u) ∈ (1, s)such that g(s)−g(1) = g′(τ)(s−1). Therefore, g′(τ) = −ντ−ν−1F (x, τu)+τ−νuf(x, τu), thus
g(s)− g(1) = −τ−ν−1[νF (x, τu)− τuf(x, τu)](s− 1).
By (F3) one has g(s) ≥ g(1), i.e. F (x, su) ≥ sνF (x, u), for every s ≥ 1.
Let cR = infF (x, s) : (x, |s|) ∈ ω × [R,∞), which is a strictly positivenumber, due to (F4). Combining the above facts we derive
F (x, s) ≥ cR
Rν|s|ν , ∀(x, s) ∈ Ω× R with |s| ≥ R. (2.9)
On the other hand, by ((F1)) we have |F (x, s)| ≤ c1(s2 + |s|p) for every(x, s) ∈ Ω× R. In particular, we have
−F (x, s) ≤ c1(s2 + |s|p) ≤ c1(1 + Rp−2 + Rν−2)s2 − c1|s|ν
for every (x, s) ∈ Ω × R with |s| ≤ R. Combining the above inequalitywith (2.9), the desired inequality yields if one chooses c2 = minc1, cR/Rνand c3 = c1(1 + Rp−2 + Rν−2).
Remark 2.3 In particular, from Lemma 2.1 we observe that 2 < ν < p.
To investigate the existence of solutions of (Pλ) we shall construct afunctional Iλ : H1
0 (Ω) → R associated to (Pλ) which is defined by
Iλ(u) =12
∫
Ω
|∇u|2 −∫
Ω
F (x, u(x))dx− λ
q
∫
Ω
a(x)|u|q + ζK(u),
where ζK is the indicator function of the set K.
If we consider the function F : H10 (Ω) → R defined by
F(u) =∫
Ω
F (x, u(x))dx,
then F is of class C1 and
〈F ′(u), v〉H10
=∫
Ω
f(x, u(x))v(x)dx, ∀ u, v ∈ H10 (Ω).
By standard arguments we have that the functionals A1, A2 : H10 (Ω) →
R, defined by A1(u) = ‖u‖2H1
0and A2(u) =
∫Ω
a(x)|u|qdx are of class C1
with derivatives
〈A′1(u), v〉H10
= 2〈u, v〉H10
and
〈A′2(u), v〉H10
= q
∫
Ω
a(x)|u|q−2uvdx.

2.2 Variational inequalities on Ω = ω × Rl 53
Therefore the function
Eλ(u) =12‖u‖2H1
0− λ
q
∫
Ω
a(x)|u|q −F(u)
on H10 (Ω) is of class C1. On the other hand, the indicator function of
the set K, i.e.
ζK(u) =
0, if u ∈ K,
+∞, if u /∈ K,
is convex, proper, and lower semi-continuous. In conclusion, Iλ = Eλ +ζK is a Szulkin-type functional.
Moreover, one easily obtain the following
Proposition 2.1 Fix λ > 0 arbitrary. Every critical point u ∈ H10 (Ω)
of Iλ = Eλ + ζK (in the sense of Szulkin) is a solution of (Pλ).
Proof Since u ∈ H10 (Ω) is a critical point of Iλ = Eλ + ζK, one has
〈E′λ(u), v − u〉H1
0+ ζK(v)− ζK(u) ≥ 0, ∀v ∈ H1
0 (Ω).
We have immediately that u belongs to K. Otherwise, we would haveζK(u) = +∞ which led us to a contradiction, letting for instance v =0 ∈ K in the above inequality. Now, we fix v ∈ K arbitrary and weobtain the desired inequality.
Remark 2.4 It is easy to see that 0 ∈ K is a trivial solution of (Pλ) forevery λ ∈ R.
Proposition 2.2 If the conditions (F1)− (F3) hold, then Iλ = Eλ + ζKsatisfies (PSZ)c-condition for every c ∈ R and λ > 0.
Proof Let λ > 0 and c ∈ R be some fixed numbers and let un be asequence from H1
0 (Ω) such that
Iλ(un) = Eλ(un) + ζK(un) → c; (2.10)
〈E′λ(un), v − un〉H1
0+ ζK(v)− ζK(un) ≥ −εn‖v − un‖H1
0, ∀v ∈ H1
0 (Ω),(2.11)
for a sequence εn in [0,∞) with εn → 0. By (2.10) one concludes thatthe sequence un belongs entirely to K. Setting v = 2un in (2.11), weobtain
〈E′λ(un), un〉H1
0≥ −εn‖un‖H1
0.

54 Variational Inequalities
From the above inequality we derive
‖un‖2H10−λ
∫
Ω
a(x)|un|q−∫
Ω
f(x, un(x))un(x)dx ≥ −εn‖un‖H10. (2.12)
By (2.10) one has for large n ∈ N that
c + 1 ≥ 12‖un‖2H1
0− λ
q
∫
Ω
a(x)|un|q −∫
Ω
F (x, un(x))dx (2.13)
Multiplying (2.12) by ν−1 and adding this one to (2.13), by Holder’sinequality we have for large n ∈ N
c + 1 +1ν‖un‖H1
0≥ (
12− 1
ν)‖un‖2H1
0− λ(
1q− 1
ν)∫
Ω
a(x)|un|q
−1ν
∫
Ω
[νF (x, un(x))− un(x)f(x, un(x))]dx
(F3)≥ (12− 1
ν)‖un‖2H1
0− λ(
1q− 1
ν)‖a‖ν/(ν−q)‖un‖q
ν
≥ (12− 1
ν)‖un‖2H1
0− λ(
1q− 1
ν)‖a‖ν/(ν−q)k
qν‖un‖q
H10.
In the above inequalities we used the Remark 2.3 and the hypothesisa ∈ L1(Ω)∩L∞(Ω) thus, in particular, a ∈ Lν/(ν−q)(Ω). Since q < 2 < ν,
from the above estimation we derive that the sequence un is boundedin K. Therefore, un is relatively compact in Lp(Ω), p ∈ (2, 2∗). Up toa subsequence, we can suppose that
un → u weakly in H10 (Ω); (2.14)
un → u strongly in Lµ(Ω), µ ∈ (2, 2∗). (2.15)
Since K is (weakly) closed then u ∈ K. Setting v = u in (2.11), wehave
〈un, u− un〉H10
+∫
Ω
f(x, un(x))(un(x)− u(x))dx
−λ
∫
Ω
a(x)|un|q−2un(u− un) ≥ −εn‖u− un‖H10.

2.2 Variational inequalities on Ω = ω × Rl 55
Therefore, in view of Remark 2.1 (i) we derive
‖u− un‖2H10
≤ 〈u, u− un〉H10
+∫
Ω
f(x, un(x))(un(x)− u(x))dx
−λ
∫
Ω
a(x)|un|q−2un(u− un) + εn‖u− un‖H10
≤ 〈u, u− un〉H10
+ λ‖a‖ν/(ν−q)‖un‖q−1ν ‖u− un‖ν + εn‖u− un‖H1
0
+ε‖un‖H10‖un − u‖H1
0+ c(ε)‖un‖p−1
p ‖un − u‖p,
where ε > 0 is arbitrary small. Taking into account relations (2.14)and (2.15), the facts that ν, p ∈ (2, 2∗), the arbitrariness of ε > 0 andεn → 0+, one has that un converges strongly to u in H1
0 (Ω). Thiscompletes the proof.
Proposition 2.3 If the conditions (F1) − (F4) are verified, then thereexists a λ0 > 0 such that for every λ ∈ (0, λ0) the function Iλ satisfiesthe Mountain Pass Geometry, i.e. the following assertions are true:
(i) there exist constants αλ > 0 and ρλ > 0 such that Iλ(u) ≥ αλ forall ‖u‖H1
0= ρλ;
(ii) there exists eλ ∈ H10 (Ω) with ‖eλ‖H1
0> ρλ and Iλ(eλ) ≤ 0.
Proof (i). Due to Remark 2.1 (ii), for every ε > 0 there exists c(ε) > 0such that F(u) ≤ ε‖u‖2
H10
+ c(ε)‖u‖pp for every u ∈ H1
0 (Ω). It suffices torestrict our attention to elements u which belong to K; otherwise Iλ(u)will be +∞, i.e. (i) holds trivially. Fix ε0 ∈ (0, 1
2 ). One has
Iλ(u) ≥ (12− ε0)‖u‖2H1
0− kp
pc(ε0)‖u‖pH1
0− λkq
p
q‖a‖p/(p−q)‖u‖q
H10
(2.16)
= (A−B‖u‖p−2H1
0− λC‖u‖q−2
H10
)‖u‖2H10,
where A = ( 12 − ε0) > 0, B = kp
pc(ε0) > 0 and C = kqp‖a‖p/(p−q)/q > 0.
For every λ > 0, let us define a function gλ : (0,∞) → R by
gλ(s) = A−Bsp−2 − λCsq−2.
Clearly, g′λ(sλ) = 0 if and only if sλ = (λ 2−qp−2
CB )
1p−q . Moreover, gλ(sλ) =
A − Dλp−2p−q , where D = D(p, q, B, C) > 0. Choosing λ0 > 0 such that
gλ0(sλ0) > 0, one clearly has for every λ ∈ (0, λ0) that gλ(sλ) > 0.
Therefore, for every λ ∈ (0, λ0), setting ρλ = sλ and αλ = gλ(sλ)s2λ, the
assertion from (i) holds true.

56 Variational Inequalities
ii). By Lemma 2.1 we have F(u) ≥ c2‖u‖νν − c3‖u‖22 for every u ∈
H10 (Ω). Let us fix u ∈ K. Then we have
Iλ(u) ≤ (12
+ c3k22)‖u‖2H1
0− c2‖u‖ν
ν +λ
q‖a‖ν/(ν−q)k
qν‖u‖q
H10. (2.17)
Fix arbitrary u0 ∈ K \ 0. Letting u = su0 (s > 0) in (2.17), we havethat Iλ(su0) → −∞ as s → +∞, since ν > 2 > q. Thus, for everyλ ∈ (0, λ0), it is possible to set s = sλ so large that for eλ = sλu0, wehave ‖eλ‖H1
0> ρλ and Iλ(eλ) ≤ 0. This ends the proof of the proposition.
The main result of this section can be read as follows.
Theorem 2.2 Let f : Ω × R → R be a function which satisfies (F1)-(F4). Then there exists λ0 > 0 such that (Pλ) has at least two nontrivial,distinct solutions u1
λ, u2λ ∈ K whenever λ ∈ (0, λ0).
Proof In the first step we prove the existence of the first nontrivialsolution of (Pλ). By Proposition 2.2, the functional Iλ satisfies (PSZ)c-condition for every c ∈ R and clearly Iλ(0) = 0 for every λ > 0.
Let us fix λ ∈ (0, λ0), λ0 being from Proposition 2.3. It follows thatthere are constants αλ, ρλ > 0 and eλ ∈ H1
0 (Ω) such that Iλ fulfillsthe properties (i) and (ii) from Theorem 1.21. Therefore, the numberc1λ = infγ∈Γ supt∈[0,1] Jλ(γ(t)), where Γ = γ ∈ C([0, 1],H1
0 (Ω)) : γ(0) =0, γ(1) = eλ, is a critical value of Iλ with c1
λ ≥ αλ > 0. It is clear thatthe critical point u1
λ ∈ H10 (Ω) which corresponds to c1
λ cannot be triv-ial since Iλ(u1
λ) = c1λ > 0 = Iλ(0). It remains to apply Proposition 2.1
which concludes that u1λ is actually an element of K and it is a solution
of (Pλ).In the next step we prove the existence of the second solution of the
problem (Pλ). For this let us fix λ ∈ (0, λ0) arbitrary, λ0 being from thefirst step. By Proposition 2.3, there exists ρλ > 0 such that
inf‖u‖
H10=ρλ
Iλ(u) > 0. (2.18)
On the other hand, since a ≥ 0, a 6≡ 0, there exists u0 ∈ K such that∫Ω
a(x)|u0(x)|qdx > 0. Thus, for t > 0 small one has
Iλ(tu0) ≤ t2(12
+ c3k22)‖u0‖2H1
0− c2t
ν‖u0‖νν −
λ
qtq
∫
Ω
a(x)|u0(x)|qdx < 0.
For r > 0, let us denote by Br = u ∈ H10 (Ω) : ‖u‖H1
0≤ r and

2.2 Variational inequalities on Ω = ω × Rl 57
Sr = u ∈ H10 (Ω) : ‖u‖H1
0= r. With these notations, relation (2.18)
and the above inequality can be summarized as
c2λ = inf
u∈Bρλ
Iλ(u) < 0 < infu∈Sρλ
Iλ(u). (2.19)
We point out that c2λ is finite, due to (2.16). Moreover, we will show
that c2λ is another critical point of Iλ. To this end, let n ∈ N \ 0 such
that1n
< infu∈Sρλ
Iλ(u)− infu∈Bρλ
Iλ(u). (2.20)
By Ekeland’s variational principle, applied to the lower semi-continuousfunctional Iλ|Bρλ
, which is bounded below (see (2.19)), there is uλ,n ∈Bρλ
such that
Iλ(uλ,n) ≤ infu∈Bρλ
Iλ(u) +1n
; (2.21)
Iλ(w) ≥ Iλ(uλ,n)− 1n‖w − uλ,n‖H1
0, ∀w ∈ Bρλ
. (2.22)
By (2.20) and (2.21) we have that Iλ(uλ,n) < infu∈SρλIλ(u); therefore
‖uλ,n‖H10
< ρλ.
Fix an element v ∈ H10 (Ω). It is possible to choose t > 0 so small that
w = uλ,n + t(v − uλ,n) ∈ Bρλ. Putting this element into (2.22), using
the convexity of ζK and dividing by t > 0, one concludes
Eλ(uλ,n + t(v − uλ,n))− Eλ(uλ,n)t
+ζK(v)−ζK(uλ,n) ≥ − 1n‖v−uλ,n‖H1
0.
Letting t → 0+, we derive
〈E′λ(uλ,n), v−uλ,n〉H1
0 (Ω) +ζK(v)−ζK(uλ,n) ≥ − 1n‖v−uλ,n‖H1
0. (2.23)
By (2.19) and (2.21) we obtain that
Iλ(uλ,n) = Eλ(uλ,n) + ζK(uλ,n) → c2λ (2.24)
as n → ∞. Since v was arbitrary fixed in (2.23), the sequence uλ,nfulfills (2.10) and (2.11), respectively. Hence, it is possible to prove in asimilar manner as in Proposition 2.2 that uλ,n contains a convergentsubsequence; denote it again by uλ,n and its limit point by u2
λ. It isclear that u2
λ belongs to Bρλ. By the lower semi-continuity of ζK we
have ζK(u2λ) ≤ lim infn→∞ ζK(uλ,n). Combining this inequality with
limn→∞〈E′λ(uλ,n), v−uλ,n〉H1
0= 〈E′
λ(u2λ), v−u2
λ〉H10
and (2.23) we have
〈E′λ(u2
λ), v − u2λ〉H1
0+ ζK(v)− ζK(u2
λ) ≥ 0, ∀v ∈ H10 (Ω),

58 Variational Inequalities
i.e. u2λ is a critical point of Iλ. Moreover,
c2λ
(2.19)= inf
u∈Bρλ
Iλ(u) ≤ Iλ(u2λ) ≤ lim inf
n→∞Iλ(uλ,n)
(2.24)= c2
λ,
i.e. Iλ(u2λ) = c2
λ. Since c2λ < 0, it follows that u2
λ is not trivial. We applyagain Proposition 2.1, concluding that u2
λ is a solution of (Pλ) whichdiffers from u1
λ. This completes the proof of Theorem 2.2.
2.3 Area–type variational inequalities
In this section we are interested to obtain existence and multiplicityresults for hemivariational inequalities associated with energies whichcome from the relaxation of functionals
f(u) =∫
Ω
√1 + |∇u|2 dx +
∫
Ω
G(x, u) dx ,
where u ∈ W 1,10 (Ω;RN ), Ω open in Rn, n ≥ 2. The first feature is that
the functional f does not satisfy the Palais-Smale condition in the spaceof functions of bounded variations
BV (Ω;RN ) :=
u ∈ L1(Ω);∂u
∂xiis a measure, for all i = 1, 2, . . . , n
,
which is the natural domain of f . Therefore we extend f to Ln/(n−1)(Ω;RN )with value +∞ outside BV (Ω;RN ). This larger space is better behavedfor the compactness properties, but the nonsmoothness of the functionalincreases. The second feature is that the assumptions we impose on G
imply the second term of f to be continuous on Ln/(n−1)(Ω;RN ), butnot locally Lipschitz. More precisely, the function s 7→ G(x, s) is sup-posed to be locally Lipschitz for a.e. x ∈ Ω, but the growth conditionswe impose do not ensure the corresponding property for the integral onLn/(n−1)(Ω;RN ).
After recalling the main tools we need in the sequel, we establishsome general results for a class of lower semicontinuous functionals f :Lp(Ω;RN ) → R ∪ +∞. Next, we show that the area-type integralsfall into the class considered in this section. By the way, we also prove arelation between the convergence in the so-called intermediate topologiesof BV (Ω;RN ) and the convergence in Ln/(n−1)(Ω;RN ). Finally, weobtain multiplicity results of Clark and Ambrosetti-Rabinowitz type.
We start with some notions and properties on nonsmooth analysis.We refer to Appendix D for basic definitions and related results.

2.3 Area–type variational inequalities 59
Definition 2.1 Let c ∈ R. We say that f satisfies condition (epi)c, ifthere exists ε > 0 such that
inf |dGf |(u, λ) : f(u) < λ, |λ− c| < ε > 0 .
The next two results are useful in dealing with condition (epi)c.
Proposition 2.4 Let (u, λ) ∈ epi (f). Assume that there exist positivenumbers %, σ, δ, ε and a continuous map
H : w ∈ Bδ(u) : f(w) < λ + δ × [0, δ] → X
satisfying
d(H(w, t), w) ≤ %t , f(H(w, t)) ≤ maxf(w)− σt, λ− εwhenever w ∈ Bδ(u), f(w) < λ + δ and t ∈ [0, δ].
Under these assumptions,
|dGf |(u, λ) ≥ σ√%2 + σ2
.
If, moreover, X is a normed space, f is even, u = 0 and H(−w, t) =−H(w, t), then
|dZ2Gf |(0, λ) ≥ σ√%2 + σ2
.
Proof Let δ′ ∈]0, δ] be such that δ′ + σδ′ ≤ ε and let
K : (Bδ′(u, λ) ∩ epi (f))× [0, δ′] → epi (f)
be defined by K((w, µ), t
)=
(H(w, t), µ − σt). If (w, µ) ∈ Bδ′(u, λ) ∩
epi (f) and t ∈ [0, δ′], we have
λ− ε ≤ λ− δ′ − σδ′ < µ− σt , f(w)− σt ≤ µ− σt ,
hence
f(H(w, t)) ≤ maxf(w)− σt, λ− ε ≤ µ− σt .
Therefore K actually takes its values in epi (f). Furthermore, it is
d(K(
(w, µ), t), (w, µ)
) ≤√
%2 + σ2 t ,
Gf
(K((w, µ), t
))= µ− σt = Gf (w, µ)− σt .
Taking into account Definition D.6, the first assertion follows.In the symmetric case, K automatically satisfies the further condition
required in Definition D.14.

60 Variational Inequalities
Corollary 2.1 Let (u, λ) ∈ epi (f) with f(u) < λ. Assume that forevery % > 0 there exist δ > 0 and a continuous map
H : w ∈ Bδ(u) : f(w) < λ + δ × [0, δ] → X
satisfying
d(H(w, t), w) ≤ %t , f(H(w, t)) ≤ f(w) + t(f(u)− f(w) + %
)
whenever w ∈ Bδ(u), f(w) < λ + δ and t ∈ [0, δ].Then we have |dGf |(u, λ) = 1. If moreover X is a normed space, f is
even, u = 0 and H(−w, t) = −H(w, t), then |dZ2Gf |(0, λ) = 1.
Proof Let ε > 0 with λ− 2ε > f(u), let 0 < % < λ− f(u)− 2ε and let δ
and H be as in the hypothesis. By reducing δ, we may also assume that
δ ≤ 1 , δ(|λ− 2ε|+ |f(u) + %|) ≤ ε .
Now consider w ∈ Bδ(u) with f(w) < λ + δ and t ∈ [0, δ]. If f(w) ≤λ− 2ε, we have
f(w) + t(f(u)− f(w) + %) = (1− t)f(w) + t(f(u) + %) ≤≤ (1− t)(λ− 2ε) + t(f(u) + %) ≤≤ λ− 2ε + t|λ− 2ε|+ t|f(u) + %| ≤ λ− ε ,
while, if f(w) > λ− 2ε, we have
f(w) + t(f(u)− f(w) + %) ≤ f(w)− (λ− f(u)− 2ε− %)t .
In any case it follows
f(H(w, t)) ≤ max f(w)− (λ− f(u)− 2ε− %)t, λ− ε .
From Proposition 2.4 we get
|dGf |(u, λ) ≥ λ− f(u)− 2ε− %√%2 + (λ− f(u)− 2ε− %)2
and the first assertion follows by the arbitrariness of %.The same proof works also in the symmetric case.
2.3.1 Statement of the problem
Let n ≥ 1, N ≥ 1, Ω be an open subset of Rn and 1 < p < ∞. In thefollowing, we denote by ‖ · ‖q the usual norm in Lq (1 ≤ q ≤ ∞). Wenow define the functional setting we are interested in.
Let E : Lp(Ω;RN ) → R ∪ +∞ be a functional such that:

2.3 Area–type variational inequalities 61
(E1) E is convex, lower semicontinuous and 0 ∈ D(E), where
D(E) =u ∈ Lp(Ω;RN ) : E(u) < +∞
;
(E2) there exists ϑ ∈ Cc(RN ) with 0 ≤ ϑ ≤ 1 and ϑ(0) = 1 such that
(E2.1) ∀u ∈ D(E), ∀v ∈ D(E) ∩ L∞(Ω;RN ), ∀c > 0 :
limh→∞
sup‖z−u‖p≤c
E(z)≤c
E(ϑ
( z
h
)v) = E(v) ;
(E2.2) ∀u ∈ D(E) : limh→∞
E(ϑ
(u
h
)u)
= E(u) .
Moreover, let G : Ω× RN → R be a function such that
(G1) G(·, s) is measurable for every s ∈ RN ;(G2) for every t > 0 there exists αt ∈ L1(Ω) such that
|G(x, s1)−G(x, s2)| ≤ αt(x)|s1 − s2|for a.e. x ∈ Ω and every s1, s2 ∈ RN with |sj | ≤ t; for a.e. x ∈ Ω weset
G(x, s; s) = γ(s; s) , ∂sG(x, s) = ∂γ(s) ,
where γ(s) = G(x, s);(G3) there exist a0 ∈ L1(Ω) and b0 ∈ R such that
G(x, s) ≥ −a0(x)− b0|s|p for a.e. x ∈ Ω and every s ∈ RN ;
(G4) there exist a1 ∈ L1(Ω) and b1 ∈ R such that
G(x, s;−s) ≤ a1(x) + b1|s|p for a.e. x ∈ Ω and every s ∈ RN .
Because of (E1) and (G3), we can define a lower semicontinuous func-tional f : Lp(Ω;RN ) → R ∪ +∞ by
f(u) = E(u) +∫
Ω
G(x, u(x)) dx .
Remark 2.1 According to (E1), the functional E is lower semicontin-uous. Condition (E2) ensures that E is continuous at least on someparticular restrictions.

62 Variational Inequalities
Remark 2.2 If s 7→ G(x, s) is of class C1 for a.e x ∈ Ω, the estimatesin (G2) and in (G4) are respectively equivalent to
|s| ≤ t =⇒ |DsG(x, s)| ≤ αt(x) ,
DsG(x, s) · s ≥ −a1(x)− b1|s|p .
Because of (G2), for a.e. x ∈ Ω and any t > 0 and s ∈ RN with |s| < t
we have
∀s ∈ RN : |G(x, s; s)| ≤ αt(x)|s| ; (2.25)
∀s∗ ∈ ∂sG(x, s) : |s∗| ≤ αt(x) . (2.26)
In the following, we set ϑh(s) = ϑ(s/h), where ϑ is a function as in (E2),and we fix M > 0 such that ϑ = 0 outside BM (0). Therefore
∀s ∈ RN : |s| ≥ hM =⇒ ϑh(s) = 0 . (2.27)
Our first result concerns the connection between the notions of gener-alized directional derivative and subdifferential in the functional spaceLp(Ω;RN ) and the more concrete setting of hemivariational inequalities,which also involves the notion of generalized directional derivative, butin RN .
If u, v ∈ Lp(Ω;RN ), we can define∫Ω
G(x, u; v) dx as∫
Ω
G(x, u; v) dx = +∞ whenever∫
Ω
[G(x, u; v)]+ dx =∫
Ω
[G(x, u; v)]− dx = +∞ .
With this convention,v 7→ ∫
ΩG(x, u; v) dx
is a convex functional
from Lp(Ω;RN ) into R.
Theorem 2.3 Let u ∈ D(f). Then the following facts hold:
(a) for every v ∈ D(E) there exists a sequence (vh) in D(E)∩L∞(Ω;RN )satisfying [G(x, u; vh−u)]+ ∈ L1(Ω), ‖vh−v‖p → 0 and E(vh) →E(v);
(b) for every v ∈ D(E) we have
f(u; v − u) ≤ E(v)− E(u) +∫
Ω
G(x, u; v − u) dx ; (2.28)
(c) if ∂f(u) 6= ∅, we have G(x, u;−u) ∈ L1(Ω) and
E(v)− E(u) +∫
Ω
G(x, u; v − u) dx ≥∫
Ω
u∗ · (v − u) dx (2.29)

2.3 Area–type variational inequalities 63
for every u∗ ∈ ∂f(u) and v ∈ D(E) (the dual space of Lp(Ω;RN )is identified with Lp′(Ω;RN ) in the usual way);
(d) if N = 1, we have [G(x, u; v − u)]+ ∈ L1(Ω) for every v ∈L∞(Ω;RN ).
Proof(a) Given ε > 0, by (E2.2) we have ‖ϑh(v)v − v‖p < ε and |E(ϑh(v)v)−E(v)| < ε for h large enough. Then, by (E2.1) we get ‖ϑk(u)ϑh(v)v −v‖p < ε and |E(ϑk(u)ϑh(v)v)− E(v)| < ε for k large enough. Of courseϑk(u)ϑh(v)v ∈ L∞(Ω;RN ) and by (2.25) we have
G(x, u; ϑk(u)ϑh(v)v − u) ≤ ϑk(u)ϑh(v)G(x, u; v − u) +
+(1− ϑk(u)ϑh(v))G(x, u;−u) ≤≤ (h + k)MαkM (x) + [G(x, u;−u)]+ .
From (G4) we infer that [G(x, u;−u)]+ ∈ L1(Ω) and assertion (a) fol-lows.(b) Without loss of generality, we may assume that [G(x, u; v − u)]+ ∈L1(Ω). Suppose first that v ∈ D(E) ∩ L∞(Ω;RN ) and take ε > 0.
We claim that for every z ∈ Lp(Ω;RN ), t ∈]0, 1/2] and h ≥ 1 withhM > ‖v‖∞, we have
G(x, z + t(ϑh(z)v − z))−G(x, z)t
≤ 2 (‖v‖∞ αhM + a1 + b1(|z|+ |v|)p) .
(2.30)In fact, for a.e. x ∈ Ω, by Lebourg’s theorem (see Appendix D) thereexist t ∈]0, t[ and u∗ ∈ ∂sG(x, z + t(ϑh(z)v − z)) such that
G(x, z + t(ϑh(z)v − z))−G(x, z)t
= u∗ · (ϑh(z)v − z) =
=1
1− t
[ϑh(z)u∗ · v − u∗ · (z + t(ϑh(z)v − z))
].
By (2.26) and (2.27), it easily follows that
|ϑh(z)u∗ · v|1− t
≤ 2 ‖v‖∞ αhM .
On the other hand, from (G4) we deduce that for a.e. x ∈ Ω
u∗ · (z + t(ϑh(z)v − z))1− t
≥ − 11− t
G(x, z+t(ϑh(z)v−z);−(z+t(ϑh(z)v−z)) ≥
≥ − 11− t
(a1 + b1|z + t(ϑh(z)v − z)|p) ≥ −2 (a1 + b1(|z|+ |v|)p) .

64 Variational Inequalities
Then (2.30) easily follows.For a.e. x ∈ Ω we have
G(x, u; ϑh(u)v − u) ≤ ϑh(u)G(x, u; v − u) + (1− ϑh(u))G(x, u;−u) ≤≤ [G(x, u; v − u)]+ + [G(x, u;−u)]+ .
Furthermore, for a.e. x ∈ Ω and every s ∈ RN , (G2) implies G(x, s; ·)to be Lipschitz continuous, so in particular
limh
G(x, u;ϑh(u)v − u) = G(x, u; v − u) a.e. in Ω .
Then, given
λ >
∫
Ω
G(x, u; v − u) dx ,
by Fatou’s lemma there exists h ≥ 1 such that
∀h ≥ h :∫
Ω
G(x, u; ϑh(u)v − u) dx < λ and ‖ϑh(u)v − v‖p < ε .
(2.31)By the lower semicontinuity of G, there exists δ ∈]0, 1/2] such that
for every z ∈ Bδ(u) it is G(z) ≥ G(u) − 12 . Then for every (z, µ) ∈
Bδ(u, f(u)) ∩ epi (f) it follows
E(z) ≤ µ− G(z) ≤ µ +12− G(u) ≤ f(u) + δ − G(u) +
12≤ E(u) + 1 .
Let now σ > 0. By assumptions (E1) and (E2.1) there exist h ≥ h andδ ≤ δ such that
‖v‖∞ < hM ,
E(z) > E(u)−σ , E(ϑh(z)v) < E(v)+σ , ‖(ϑh(z)v−z)−(v−u)‖p < ε ,
for any z ∈ Bδ(u) with E(z) ≤ E(u) + 1.Taking into account (D.1), (2.30) and (2.31), we deduce by Fatou’s
lemma that, possibly reducing δ, for any t ∈]0, δ] and for any z ∈ Bδ(u)we have ∫
Ω
G(x, z + t(ϑh(z)v − z))−G(x, z)t
dx < λ .
Now let V : (Bδ(u, f(u)) ∩ epi (f))×]0, δ] → Bε(v − u) be definedsetting
V((z, µ), t) = ϑh(z)v − z .

2.3 Area–type variational inequalities 65
Since V is evidently continuous and
f(z + tV((z, µ), t)) = f(z + t(ϑh(z)v − z)) ≤≤ E(z) + t (E(ϑh(z)v)− E(z)) + G(z + t(ϑh(z)v − z) ≤≤ E(z) + (E(v)− E(u) + 2σ)t + G(z) + λt =
= f(z) + (E(v)− E(u) + λ + 2σ)t ,
we have
fε (u; v − u) ≤ E(v)− E(u) + λ + 2σ .
By the arbitrariness of σ > 0 and λ >
∫
Ω
G(x, u; v − u) dx, it follows
fε (u; v − u) ≤ E(v)− E(u) +∫
Ω
G(x, u; v − u) dx .
Passing to the limit as ε → 0+, we get (2.28) when v ∈ D(E)∩L∞(Ω;RN ).Let us now treat the general case. If we set vh = ϑh(v)v, we have
vh ∈ L∞(Ω;RN ). Arguing as before, it is easy to see that
G(x, u; vh − u) ≤ [G(x, u; v − u)]+ + [G(x, u;−u)]+ ,
so that
lim suph
∫
Ω
G(x, u; vh − u) dx ≤∫
Ω
G(x, u; v − u) dx .
On the other hand, by the previous step it holds
f(u; vh − u) ≤ E(vh)− E(u) +∫
Ω
G(x, u; vh − u) dx .
Passing to the lower limit as h →∞ and taking into account the lowersemicontinuity of f(u, ·) and (E2.2), we get (2.28).(c) We already know that [G(x, u;−u)]+ ∈ L1(Ω). If we choose v = 0in (2.28), we obtain
f(u;−u) ≤ E(0)− E(u) +∫
Ω
G(x, u;−u) dx .
Since ∂f(u) 6= ∅, it is f(u;−u) > −∞, hence∫
Ω
[G(x, u;−u)]− dx < +∞ .
Finally, if u∗ ∈ ∂f(u) we have by definition that
f(u; v − u) ≥∫
Ω
u∗ · (v − u) dx

66 Variational Inequalities
and (2.29) follows from (2.28).(d) From (2.25) it readily follows that G(x, u; v−u) is summable where|u(x)| ≤ ‖v‖∞. On the other hand, where |u(x)| > ‖v‖∞ we have
G(x, u; v − u) =(1− v
u
)G(x, u;−u)
and the assertion follows from (G4).
Since f is only lower semicontinuous, we are interested in the verificationof the condition (epi)c. For this purpose, we consider an assumption(G′3) on G stronger than (G3).
Theorem 2.4 Assume that
(G′3) there exist a ∈ L1(Ω) and b ∈ R such that
|G(x, s)| ≤ a(x) + b|s|p for a.e. x ∈ Ω and every s ∈ RN .
Then for every (u, λ) ∈ epi (f) with λ > f(u) it is |dGf |(u, λ) =1. Moreover, if E and G(x, ·) are even, for every λ > f(0) we have|dZ2Gf |(0, λ) = 1.
Proof Let % > 0. Since
∀τ ∈ [0, 1] : G(x, u; τu− u) = (1− τ)G(x, u;−u) ≤ [G(x, u;−u)]+ ,
by (E2.2) and (G4) there exists h ≥ 1 such that
‖ϑh(u)u− u‖p < % , E(ϑh(u)u) < E(u) + % ,
∀h ≥ h :∫
Ω
G(x, u; ϑh(u)ϑh(u)u− u) dx < % .
Set v = ϑh(u)u.By (E2.1) there exist h ≥ h and δ ∈]0, 1] such that
‖ϑh(z)v − z‖p < % , E(ϑh(z)v) < E(u) + % ,
whenever ‖z − u‖p < δ and E(z) ≤ λ + 1− G(u) + %.By decreasing δ, from (G′3), (2.30) and (D.1) we deduce that
|G(z)− G(u)| < % ,
∫
Ω
G(x, z + t(ϑh(z)v − z))−G(x, z)t
dx < %
whenever ‖z − u‖p < δ and 0 < t ≤ δ.Define a continuous map
H : z ∈ Bδ(u) : f(z) < λ + δ × [0, δ] → X

2.3 Area–type variational inequalities 67
by H(z, t) = z+t(ϑh(z)v−z). It is readily seen that ‖H(z, t)−z‖p ≤ %t.If z ∈ Bδ(u), f(z) < λ + δ and 0 ≤ t ≤ δ, we have
E(z) = f(z)− G(z) < λ + δ − G(u) + % ≤ λ + 1− G(u) + % ,
hence, taking into account the convexity of E ,
E(z+t(ϑh(z)v−z)) ≤ E(z)+t(E(ϑh(z)v)−E(z)) ≤ E(z)+t(E(u)−E(z)+%) .
Moreover, we also have
G(z + t(ϑh(z)v − z)) ≤ G(z) + t% ≤ G(z) + t(G(u)− G(z) + 2%) .
Therefore
f(z + t(ϑh(z)v − z)) ≤ f(z) + t(f(u)− f(z) + 3%) .
and the first assertion follows by Corollary 2.1.Now assume that E and G(x, ·) are even and that u = 0. Then, in the
previous argument, we have v = 0, so that H(−z, t) = −H(z, t) and thesecond assertion also follows.
Now we want to provide a criterion which helps in the verification of thePalais-Smale condition. For this purpose, we consider further assump-tions on E , which ensure a suitable coerciveness, and a new condition(G′4) on G, stronger than (G4), which is a kind of one-sided subcriticalgrowth condition.
Theorem 2.5 Let c ∈ R. Assume that
(E3) for every (uh) bounded in Lp(Ω;RN ) with (E(uh)) bounded, thereexists a subsequence (uhk
) and a function u ∈ Lp(Ω;RN ) suchthat
limk→∞
uhk(x) = u(x) for a.e. x ∈ Ω ;
(E4) if (uh) is a sequence in Lp(Ω;RN ) weakly convergent to u ∈ D(E)and E(uh) converges to E(u), then (uh) converges to u stronglyin Lp(Ω;RN );
(G′4) for every ε > 0 there exists aε ∈ L1(Ω) such that
G(x, s;−s) ≤ aε(x)+ε|s|p for a.e. x ∈ Ω and every s ∈ RN .
Then any (PS)c-sequence (uh) for f bounded in Lp(Ω;RN ) admits asubsequence strongly convergent in Lp(Ω;RN ).

68 Variational Inequalities
Proof From (G3) we deduce that (G(uh)) is bounded from below. Takinginto account (E1), it follows that (E(uh)) is bounded. By (E3) there existsa subsequence, still denoted by (uh), converging weakly in Lp(Ω;RN )and a.e. to some u ∈ D(E).
Given ε > 0, by (E2.2) and (G4) we may find k0 ≥ 1 such that
E(ϑk0(u)u) < E(u) + ε ,
∫
Ω
(1− ϑk0(u))G(x, u;−u) dx < ε .
Since ϑk0(u)u ∈ D(E) ∩ L∞(Ω;RN ), by (E2.1) there exists k1 ≥ k0 suchthat
∀h ∈ N : E(ϑk1(uh)ϑk0(u)u) < E(u) + ε , (2.32)
∫
Ω
(1− ϑk1(u)ϑk0(u))G(x, u;−u) dx < ε .
It follows that ϑk1(uh)ϑk0(u)u ∈ D(E). Moreover, from (2.25) and (G′4)we get
G(x, uh; ϑk1(uh)ϑk0(u)u− uh) ≤≤ ϑk1(uh)G(x, uh;ϑk0(u)u− uh) + (1− ϑk1(uh))G(x, uh;−uh) ≤
≤ αk1M (x)(k0M + k1M) + aε(x) + ε|uh|p .
From (D.2) and Fatou’s Lemma we deduce that
lim suph→∞
∫
Ω
[G(x, uh; ϑk1(uh)ϑk0(u)u− uh)− ε|uh|p] dx ≤
≤∫
Ω
[G(x, u; ϑk1(u)ϑk0(u)u− u)− ε|u|p] dx ≤
≤∫
Ω
(1− ϑk1(u)ϑk0(u))G(x, u;−u) dx < ε ,
hence
lim suph→∞
∫
Ω
G(x, uh;ϑk1(uh)ϑk0(u)u− uh) dx < ε suph‖uh‖p
p + ε . (2.33)
Since (uh) is a (PS)c-sequence, by Theorem D.2 there exists u∗h ∈ ∂f(uh)with ‖u∗h‖p′ ≤ |df |(uh), so that lim
h→∞‖u∗h‖p′ = 0. Applying (c) of Theo-

2.3 Area–type variational inequalities 69
rem 2.3, we get
E(ϑk1(uh)ϑk0(u)u) ≥ E(uh)−∫
Ω
G(x, uh; ϑk1(uh)ϑk0(u)u− uh) dx+
+∫
Ω
u∗h · (ϑk1(uh)ϑk0(u)u− uh) dx .
Taking into account (2.32), (2.33) and passing to the upper limit, weobtain
lim suph→∞
E(uh) ≤ E(u) + 2ε + ε suph‖uh‖p
p .
By the arbitrariness of ε > 0, we finally have
lim suph→∞
E(uh) ≤ E(u)
and the strong convergence of (uh) to u follows from (E4).
2.3.2 Area type functionals
Let n ≥ 2, N ≥ 1, Ω be a bounded open subset of Rn with Lipschitzboundary and let
Ψ : RnN → R
be a convex function satisfying
(Ψ)
Ψ(0) = 0, Ψ(ξ) > 0 for any ξ 6= 0 and
there exists c > 0 such that Ψ(ξ) ≤ c|ξ| for any ξ ∈ RnN .
We want to study the functional E : Ln
n−1 (Ω;RN ) → R∪ +∞ definedby
E(u) =
∫
Ω
Ψ(Dua) dx+∫
Ω
Ψ∞(
Dus
|Dus|)
d|Dus|(x)+
+∫
∂Ω
Ψ∞(u⊗ ν) dHn−1(x) if u ∈ BV (Ω;RN ),
+∞ if u ∈ Ln
n−1 (Ω;RN )\BV (Ω;RN ),
where Du = Dua dx+Dus is the Lebesgue decomposition of Du, |Dus| isthe total variation of Dus, Dus/|Dus| is the Radon-Nikodym derivativeof Dus with respect to |Dus|, Ψ∞ is the recession functional associatedwith Ψ, ν is the outer normal to Ω and the trace of u on ∂Ω is stilldenoted by u (see e.g. [?, ?]).

70 Variational Inequalities
Theorem 2.6 The functional E satisfies conditions (E1), (E2), (E3) and(E4).
The section will be devoted to the proof of this result. We begin estab-lishing some technical lemmas. For notions concerning the space BV ,such as those of u, Su, u+ and u−, we refer the reader to [?, ?].
In BV (Ω;RN ) we will consider the norm
‖u‖BV =∫
Ω
|Dua| dx + |Dus|(Ω) +∫
∂Ω
|u| dHn−1(x) ,
which is equivalent to the standard norm of BV (Ω;RN ).
Lemma 2.2 For every u ∈ BV (Ω;RN ) and every ε > 0 there existsv ∈ C∞c (Ω;RN ) such that
‖v−u‖ nn−1
< ε ,
∣∣∣∣∣∣
∫
Ω
|Dv| dx− ‖u‖BV
∣∣∣∣∣∣< ε , |E(v)−E(u)| < ε , ‖v‖∞ ≤ esssupΩ|u| .
Proof Let δ > 0, let R > 0 with Ω ⊆ BR(0) and let
ϑh(x) = 1−min
max
h + 1h
[1− h d(x,Rn \ Ω)], 0
, 1
.
Define u ∈ BV (BR(0);RN ) by
u(x) =
u(x) if x ∈ Ω ,
0 if x ∈ BR(0) \ Ω .
According to [?, Lemma 7.4 and formula (7.2)], if h is sufficiently large,we have that ϑhu ∈ BV (Ω;RN ), ‖ϑhu− u‖ n
n−1< δ and
∫
Ω
√1 + |D(ϑhu)a|2 dLn + |D(ϑhu)s|(Ω) <
<
∫
Ω
√1 + |Dua|2 dLn + |Dus|(Ω) +
∫
∂Ω
|u| dHn−1 + δ =
=∫
BR(0)
√1 + |Dua|2 dLn + |Dus|(BR(0)) + δ .
Moreover, ϑhu has compact support in Ω and esssupΩ|ϑhu| ≤ esssupΩ|u|.If we regularize ϑhu by convolution, we easily get v ∈ C∞c (Ω;RN )
with
‖v‖∞ ≤ esssupΩ|u| , ‖v − u‖ nn−1
< δ

2.3 Area–type variational inequalities 71
and∫
Ω
√1 + |Dv|2 dLn <
∫
BR(0)
√1 + |Dua|2 dLn + |Dus|(BR(0)) + δ .
Since
‖u‖BV =∫
BR(0)
|Dua| dx + |Dus|(BR(0)) ,
E(u) =∫
BR(0)
Ψ(Dua) dx +∫
BR(0)
Ψ∞(
Dus
|Dus|)
d|Dus| ,
by the results of [?] the assertion follows (see also [?, Fact 3.1]).
Lemma 2.3 The following facts hold:
(a) Ψ : RnN → R is Lipschitz continuous of some constant Lip(Ψ) >
0;(b) for any ξ ∈ RnN and s ∈ [0, 1] we have Ψ(sξ) ≤ sΨ(ξ);(c) for every σ > 0 there exists dσ > 0 such that
∀ξ ∈ RnN : Ψ(ξ) ≥ dσ(|ξ| − σ) ;
(d) E : BV (Ω;RN ) → R is Lipschitz continuous of constant Lip(Ψ);(e) if σ and dσ are as in (c), we have
∀u ∈ BV (Ω;RN ) : E(u) ≥ dσ
(‖u‖BV − σLn(Ω)
).
Proof Properties (a) and (b) easily follow from the convexity of Ψ andassumption (Ψ).
To prove (c), assume by contradiction that σ > 0 and (ξh) is a se-quence with Ψ(ξh) < 1
h (|ξh| − σ). If |ξh| → +∞, we have eventually
Ψ(
ξh
|ξh|)≤ Ψ(ξh)
|ξh| <1h
(1− σ
|ξh|)
.
Up to a subsequence, (ξh/|ξh|) is convergent to some η 6= 0 with Ψ(η) ≤0, which is impossible. Since |ξh| is bounded, up to a subsequence wehave ξh → ξ with |ξ| ≥ σ and Ψ(ξ) ≤ 0, which is again impossible.
Finally, (d) easily follows from (a) and the definition of ‖ · ‖BV , while(e) follows from (c) (see e.g. [?, Lemma 4.1]).

72 Variational Inequalities
Let now ϑ ∈ C1c (RN ) with 0 ≤ ϑ ≤ 1, ‖∇ϑ‖∞ ≤ 2, ϑ(s) = 1 for |s| ≤ 1
and ϑ(s) = 0 for |s| ≥ 2. Define ϑh : RN → R and Th, Rh : RN → RN
by
ϑh(s) = ϑ( s
h
), Th(s) = ϑh(s)s , Rh(s) = (1− ϑh(s))s .
Lemma 2.4 There exists a constant cΨ > 0 such that
E(ϑ
(u
h
)v)≤ E(v) +
cΨ
h‖v‖∞‖u‖BV ,
E(Th u) ≤ E(u) + cΨ
[|Du|(x ∈ Ω \ Su : |u(x)| > h)+
+∫
x∈Su:|u+(x)|>h or |u−(x)|>h|u+−u−| dHn−1(x)+
∫
x∈∂Ω:|u(x)|>h|u| dHn−1(x)
],
E(Th w) + E(Rh w) ≤ E(w) + cΨ
∫
x∈Ω:h<|w(x)|<2h|Dw| dx
whenever h ≥ 1, u ∈ BV (Ω;RN ), v ∈ BV (Ω;RN ) ∩ L∞(Ω;RN ) andw ∈ C∞c (Ω;RN ).
Proof Suppose first that u, v ∈ C∞c (Ω;RN ). Then, since
D[ϑ
(u
h
)v]
= ϑ(u
h
)Dv +
1h
v ⊗[Dϑ
(u
h
)Du
],
by (Ψ) and Lemma 2.3 it follows that
E(ϑ
(u
h
)v)≤ E(v) + Lip(Ψ)
‖Dϑ‖∞h
‖v‖∞∫
Ω
|Du| dx . (2.34)
In the general case, let us consider two sequences (uk), (vk) in C∞c (Ω;RN )converging to u, v in L1(Ω;RN ) with
∫Ω|Duk| dx → ‖u‖BV , E(vk) →
E(v) and ‖vk‖∞ ≤ ‖v‖∞. Passing to the lower limit in (2.34), we obtainthe first inequality in the assertion.
To prove the second inequality, we first observe that by Lemma 2.3we have
E(Th u) ≤ E(u) + Lip(Ψ)‖Rh u‖BV . (2.35)
In order to estimate the last term in (2.35), we apply the chain rule of

2.3 Area–type variational inequalities 73
[?, ?]. Since Rh(s) = 0 if |s| ≤ h and ‖DRh‖∞ ≤ kϑ for some kϑ > 0,we have∫
Ω
|D(Rh(u))a| dx ≤∫
Ω\Su
|DRh(u)||Dua| dx ≤ kϑ
∫
x∈Ω\Su:|u(x)|>h|Dua| dx ,
∣∣∣D(Rh(u))s∣∣∣(Ω) ≤
∫
Ω\Su
|DRh(u)| d|Dus|(x)+∫
Su
|Rh(u+)−Rh(u−)| dHn−1(x) ≤
≤ kϑ
(|Dus| (x ∈ Ω \ Su : |u(x)| > h)+
∫
x∈Su:|u+(x)|>h or |u−(x)|>h|u+−u−| dHm−1(x)
)
and ∫
∂Ω
|Rh(u)| dHn−1(x) ≤ kϑ
∫
x∈∂Ω:|u(x)|>h|u| dHn−1(x) .
Combining these three estimates, we get
‖Rhu‖BV ≤ kϑ
(∫
x∈Ω\Su:|u(x)|>h|Dua| dx+|Dus|(x ∈ Ω\Su : |u(x)| > h)+
(2.36)
+∫
x∈Su:|u+(x)|>h or |u−(x)|>h|u+−u−| dHm−1(x)+
∫
x∈∂Ω:|u(x)|>h|u| dHn−1(x)
).
Then the second inequality follows from (2.35) and (2.36).Again, since Ψ is Lipschitz continuous, we have
∣∣∣∣∫
Ω
Ψ(D(Th w)) dx−∫
Ω
Ψ(ϑh(w)Dw) dx
∣∣∣∣ ≤ Lip(Ψ)h
∫
Ω
∣∣∣Dϑ(w
h
)Dw
∣∣∣ |w| dx ≤
≤ 2Lip(Ψ)‖∇ϑ‖∞∫
h<|w|<2h|Dw| dx .
In a similar way, it is also∣∣∣∣∫
Ω
Ψ(D(Rh w)) dx−∫
Ω
Ψ((1− ϑh(w))Dw) dx
∣∣∣∣ ≤ 2 Lip(Ψ)‖∇ϑ‖∞∫
h<|w|<2h|Dw| dx .
Hence, combining the last two estimates and taking into account (b) ofLemma 2.3, we get
∫
Ω
Ψ(D(Th w)
)dx +
∫
Ω
Ψ(D(Rh w)
)dx ≤
≤∫
Ω
Ψ(Dw) dx + 4Lip(Ψ)‖∇ϑ‖∞∫
h<|w|<2h|Dw| dx
and the proof is complete.

74 Variational Inequalities
Lemma 2.5 Let (uh) be a sequence in C∞c (Ω;RN ) and assume that (uh)is bounded in BV (Ω;RN ).
Then for every ε > 0 and every k ∈ N there exists k ≥ k such that
lim infh→∞
∫
k<|uh|<2k
|Duh| dx < ε .
Proof Let m ≥ 1 be such that
suph
∫
Ω
|Duh| dx ≤ mε
2
and let i0 ∈ N with 2i0 ≥ k. Then, since
i0+m−1∑
i=i0
∫
2i<|uh|<2i+1|Duh| dx ≤
∫
Ω
|Duh| dx ≤ mε
2,
there exists ih between i0 and i0 + m− 1 such that∫
2ih <|uh|<2ih+1|Duh| dx ≤ ε
2.
Passing to a subsequence (ihj ), we can suppose ihj ≡ i ≥ i0, and settingk = 2i we get
∀j ∈ N :∫
k<|uhj|<2k
|Duhj | dx ≤ ε
2.
Then the assertion follows.
Lemma 2.6 Let (uh) be a sequence in C∞c (Ω;RN ) and let u ∈ BV (Ω;RN )with ‖uh − u‖1 → 0 and E(uh) → E(u).
Then for every ε > 0 and every k ∈ N there exists k ≥ k such that
lim infh→∞
‖Rk uh‖BV < ε .
Proof Given ε > 0, let d > 0 be such that
∀ξ ∈ RnN : Ψ(ξ) ≥ d
(|ξ| − ε
3Ln(Ω)
),
according to Lemma 2.3. Let also cΨ > 0 be as in Lemma 2.4. By (2.36)and Lemma 2.5, there exists k ≥ k such that
‖Rk u‖BV <dε
3Lip(Ψ),

2.3 Area–type variational inequalities 75
lim infh→∞
∫
k<|uh|<2k
|Duh| dx <dε
3cΨ.
From Lemma 2.4 we deduce that
E(Tk u) + lim infh→∞
E(Rk uh) ≤ lim infh→∞
E(Tk uh) + lim infh→∞
E(Rk uh) ≤
≤ lim infh→∞
(E(Tk uh) + E(Rk uh)
)≤
≤ E(u) + cΨ lim infh→∞
∫
k<|uh|<2k
|Duh| dx <
< E(u) +dε
3≤ E(Tk u) + Lip(Ψ)‖Rk u‖BV +
dε
3<
< E(Tk u) +23dε ,
whence
lim infh→∞
E(Rk uh) <23dε .
On the other hand, by Lemma 2.3 we have
E(Rk uh) ≥ d(‖Rk uh‖BV − ε
3
)
and the assertion follows.
Now we can prove the main auxiliary result we need for the proof ofTheorem 2.6. It is a property of the space BV which could be interestingalso in itself.
Theorem 2.7 Let (uh) be a sequence in BV (Ω;RN ) and let u ∈ BV (Ω;RN )with ‖uh − u‖1 → 0 and E(uh) → E(u).
Then (uh) is strongly convergent to u in Ln
n−1 (Ω;RN ).
Proof By Lemma 2.2 we may find vh ∈ C∞c (Ω;RN ) with
‖vh − uh‖1 <1h
, ‖vh − uh‖ nn−1
<1h
, |E(vh)− E(uh)| < 1h
.
Therefore it is sufficient to treat the case in which uh ∈ C∞c (Ω;RN ).By contradiction, up to a subsequence we may assume that there
exists ε > 0 such that ‖uh − u‖ nn−1
≥ ε. Let c be a constant such that‖w‖ n
n−1≤ c‖w‖BV for any w ∈ BV (Ω;RN ) (see [?, Theorem 1.28]).
According to Lemma 2.6, let k ∈ N be such that
‖Rk u‖ nn−1
<ε
2, lim inf
h→∞‖Rk uh‖ n
n−1≤ c lim inf
h→∞‖Rk uh‖BV <
ε
2.

76 Variational Inequalities
Then we have
‖uh−u‖ nn−1
≤ ‖Rkuh‖ nn−1
+‖Tkuh−Tku‖ nn−1
+‖Rku‖ nn−1
. (2.37)
Since Tk uh → Tk u in Ln
n−1 (Ω;RN ) as h →∞, passing to the lowerlimit in (2.37) we get
lim infh→∞
‖uh − u‖ nn−1
< ε ,
whence a contradiction.
Proof of Theorem 2.6. It is well known that E satisfies condition (E1).Conditions (E2) are an immediate consequence of Lemma 2.4. From (e)of Lemma 2.3 and Rellich’s Theorem (see [?, Theorem 1.19]) it followsthat E satisfies condition (E3). To prove (E4), let (uh) be a sequencein L
nn−1 (Ω;RN ) weakly convergent to u ∈ BV (Ω;RN ) such that E(uh)
converges to E(u). Again by (e) of Lemma 2.3 and Rellich’s Theoremwe deduce that (uh) is strongly convergent to u in L1(Ω;RN ). Then theassertion follows from Theorem 2.7.
2.3.3 A result of Clark type
Let n ≥ 2 and Ω be a bounded open subset of Rn with Lipschitz bound-ary, let Ψ : RnN → R be an even convex function satisfying (Ψ) and letG : Ω × RN → R be a function satisfying (G1), (G2), (G′3), (G′4) withp = n
n−1 and the following conditions:
there exist a ∈ L1(Ω) and b ∈ Ln(Ω) such that
G(x, s) ≥ −a(x)− b(x)|s| for a.e. x ∈ Ω and every s ∈ RN ;(2.38)
lim|s|→∞
G(x, s)|s| = +∞ for a.e. x ∈ Ω ; (2.39)
s 7−→ G(x, s) is even for a.e. x ∈ Ω . (2.40)
Finally, define E as in Section 4. The main result of this section is:
Theorem 2.8 For every k ∈ N there exists Λk such that for any λ ≥ Λk
the problem
u ∈ BV (Ω;RN )
E(v)− E(u) +∫
Ω
G(x, u; v−u) dx ≥ λ
∫
Ω
u√1 + |u|2 · (v−u) dx ∀v ∈ BV (Ω;RN )

2.3 Area–type variational inequalities 77
admits at least k pairs (u,−u) of distinct solutions.
For the proof we need the following
Lemma 2.7 Let (uh) be a bounded sequence in Ln
n−1 (Ω;RN ), which isconvergent a.e. to u, and let (%h) be a positively divergent sequence ofreal numbers.
Then we have
limh
∫
Ω
G(x, %huh)%h
dx = +∞ if u 6= 0 ,
lim infh
∫
Ω
G(x, %huh)%h
dx ≥ 0 if u = 0 .
Proof If u = 0, the assertion follows directly from (2.38). If u 6= 0, wehave∫
Ω
G(x, %huh)%h
dx ≥∫
u 6=0
G(x, %huh)%h
dx− 1%h
∫
u=0a dx−
∫
u=0b|uh| dx .
From (2.38), (2.39) and Fatou’s Lemma, we deduce that
limh
∫
u 6=0
G(x, %huh)%h
dx = +∞ ,
whence the assertion.
Proof of Theorem 2.8. First of all, set
G(x, s) = G(x, s)− λ(√
1 + |s|2 − 1).
It is easy to see that also G satisfies (G1), (G2), (G′3), (G′4), (2.38),(2.39), (2.40) and that
G(x, s; s) = G(x, s; s)− λs√
1 + |s|2 · s .
Now define a lower semicontinuous functional f : Ln
n−1 (Ω;RN ) → R ∪+∞ by
f(u) = E(u) +∫
Ω
G(x, u) dx .
Then f is even by (2.40) and satisfies condition (epi)c by Theorem 2.4.We claim that
lim‖u‖ n
n−1→∞
f(u) = +∞ . (2.41)

78 Variational Inequalities
To prove it, let (uh) be a sequence in BV (Ω;RN ) with ‖uh‖ nn−1
= 1 andlet %h → +∞. By (e) of Lemma 2.3 there exist c > 0 and d > 0 suchthat
∀u ∈ BV (Ω;RN ) : E(u) ≥ d(‖u‖BV − cLn(Ω)
).
If ‖uh‖BV → +∞, it readily follows from (2.38) that f(%huh) → +∞.Otherwise, up to a subsequence, uh is convergent a.e. and the assertionfollows from the previous Lemma and the inequality
f(%huh) ≥ %h
[d
(‖uh‖BV − c
%hLn(Ω)
)+
∫
Ω
G(x, %huh)%h
dx
].
Since f is bounded below on bounded subsets of Ln
n−1 (Ω;RN ), it fol-lows from (2.41) that f is bounded below on all L
nn−1 (Ω;RN ); further-
more, it also turns out from (2.41) that any (PS)c sequence is bounded,hence f satisfies (PS)c by Theorem 2.5.
Finally, let k ≥ 1, let w1, . . . , wk be linearly independent elementsof BV (Ω;RN ) and let ψ : Sk−1 → L
nn−1 (Ω;RN ) be the odd continuous
map defined by
ψ(ξ) =k∑
j=1
ξjwj .
Because of (G′3), it is easily seen that
supE(u) +
∫
Ω
G(x, u) dx : u ∈ ψ(Sk−1)
< +∞
and
inf∫
Ω
(√1 + |u|2 − 1
)dx : u ∈ ψ(Sk−1)
> 0 .
Therefore there exists Λk > 0 such that supξ∈Sk−1
f(ψ(ξ)) < 0 whenever
λ ≥ Λk.Next, we recall the following result which is due to Clark. We refer to
Theorem 2.5 in [84] for a nonsmooth version and complete proof.
Theorem 2.9 Let X be a Banach space and f : X → R ∪ +∞ aneven lower semicontinuous function. Assume that
(a) f is bounded from below;(b) for every c < f(0), the function f satisfies (PS)c and (epi)c;

2.3 Area–type variational inequalities 79
(c) there exist k ≥ 1 and an odd continuous map ψ : Sk−1 → X suchthat
supf(ψ(x)) : x ∈ Sk−1
< f(0) ,
where Sk−1 denotes the unit sphere in Rk.
Then f admits at least k pairs (u1,−u1), . . . , (uk,−uk) of criticalpoints with f(uj) < f(0).
Applying now Theorem 2.9, it follows that f admits at least k pairs(uk,−uk) of critical points. Therefore, by Theorem D.2, for any uk it ispossible to apply Theorem 2.3 (with G instead of G), which completesthe proof.
2.3.4 A superlinear potential
Let n ≥ 2 and Ω be a bounded open subset of Rn with Lipschitz bound-ary, let Ψ : RnN → R be an even convex function satisfying (Ψ) and letG : Ω×RN → R be a function satisfying (G1), (G2), (G′3), (G′4), (2.40)with p = n
n−1 and the following condition:
there exist q > 1 and R > 0 such that
G(x, s; s) ≤ qG(x, s) < 0 for a.e. x ∈ Ω and every s ∈ RN with |s| ≥ R .(2.42)
Define E as in section 4 and an even lower semicontinuous functionalf : L
nn−1 (Ω;RN ) → R ∪ +∞ by
f(u) = E(u) +∫
Ω
G(x, u) dx .
Theorem 2.10 There exists a sequence (uh) of solutions of the problem
u ∈ BV (Ω;RN )
E(v)− E(u) +∫
Ω
G(x, u; v − u) dx ≥ 0 ∀v ∈ BV (Ω;RN )
with f(uh) → +∞.
Proof According to (2.25), we have
|s| < R =⇒ |G(x, s; s)| ≤ αR(x)|s| .

80 Variational Inequalities
Combining this fact with (2.42) and (G′3), we deduce that there existsa0 ∈ L1(Ω) such that
G(x, s; s) ≤ qG(x, s) + a0(x) for a.e. x ∈ Ω and every s ∈ RN .
(2.43)Moreover, from (2.42) and Lebourg’s mean value theorem it follows thatfor every s ∈ RN with |s| = 1 the function t → t−qG(x, ts) is nonin-creasing on [R, +∞[. Taking into account (G′3) and possibly substitutinga0 with another function in L1(Ω), we deduce that
G(x, s) ≤ a0(x)− b0(x)|s|q for a.e. x ∈ Ω and every s ∈ RN ,
(2.44)where
b0(x) = inf|s|=1
(−R−qG(x,Rs)) > 0 for a.e. x ∈ Ω .
Finally, since s → G(x, s; s) is a convex function vanishing at the ori-gin, we have G(x, s; s) ≥ −G(x, s;−s). Combining (2.43) with (G′4),we deduce that for every ε > 0 there exists aε ∈ L1(Ω) such that
G(x, s) ≥ −aε(x)− ε|s| nn−1 for a.e. x ∈ Ω and every s ∈ RN .
(2.45)By Theorem 2.4 we have that f satisfies (epi)c for any c ∈ R and that
|dZ2Gf |(0, λ) = 1 for any λ > f(0).We also recall that, since Ψ is Lipschitz continuous, there exists M ∈ R
such that
(q + 1)Ψ(ξ)−Ψ(2ξ) ≥ q − 12
Ψ(ξ)−M , (2.46)
(q + 1)Ψ∞(ξ)−Ψ∞(2ξ) ≥ q − 12
Ψ∞(ξ) (2.47)
(see also [?]).We claim that f satisfies the condition (PS)c for every c ∈ R. Let
(uh) be a (PS)c-sequence for f . By Theorem D.2 there exists a sequence(u∗h) in Ln(Ω;RN ) with u∗h ∈ ∂f(uh) and ‖u∗h‖n → 0. According toTheorem 2.3 and (2.43), we have
E(2uh) ≥ E(uh)−∫
Ω
G(x, uh;uh) dx +∫
Ω
u∗h · uh dx ≥
≥ E(uh)− q
∫
Ω
G(x, uh) dx +∫
Ω
u∗h · uh dx−∫
Ω
a0(x) dx .

2.3 Area–type variational inequalities 81
By the definition of f , it follows
qf(uh) + ‖u∗h‖n‖uh‖ nn−1
+∫
Ω
a0(x) dx ≥ (q + 1)E(uh)− E(2uh) .
Finally, applying (2.46) and (2.47) we get
qf(uh) + ‖u∗h‖n‖uh‖ nn−1
+∫
Ω
a0(x) dx ≥ q − 12
E(uh)−MLn(Ω) .
By (e) of Lemma 2.3 we deduce that (uh) is bounded in BV (Ω;RN ),hence in L
nn−1 (Ω;RN ). Applying Theorem 2.5 we get that (uh) admits
a strongly convergent subsequence and (PS)c follows.By [?, Lemma 3.8], there exist a strictly increasing sequence (Wh) of
finite-dimensional subspaces of BV (Ω;RN ) ∩ L∞(Ω;RN ) and a strictlydecreasing sequence (Zh) of closed subspaces of L
nn−1 (Ω;RN ) such that
Ln
n−1 (Ω;RN ) = Wh ⊕Zh and∞⋂
h=0
Zh = 0. By (e) of Lemma 2.3 there
exists % > 0 such that
∀u ∈ Ln
n−1 (Ω;RN ) : ‖u‖ nn−1
= % =⇒ E(u) ≥ 1 .
We claim that
limh
(inff(u) : u ∈ Zh, ‖u‖ n
n−1= %
)> f(0) .
Actually, assume by contradiction that (uh) is a sequence with uh ∈ Zh,‖uh‖ n
n−1= % and
lim suph
f(uh) ≤ f(0) .
Taking into account (G′3) and Lemma 2.3, we deduce that (E(uh)) isbounded, so that (uh) is bounded in BV (Ω;RN ). Therefore, up to asubsequence, (uh) is convergent a.e. to 0. From (2.45) it follows that
lim infh
∫
Ω
(G(x, uh) + ε|uh|
nn−1
)dx ≥
∫
Ω
G(x, 0) dx ,
hence
lim infh
∫
Ω
G(x, uh) dx ≥∫
Ω
G(x, 0) dx
by the boundedness of (uh) in Ln
n−1 (Ω;RN ) and the arbitrariness of ε.Therefore
lim suph
E(uh) ≤ E(0) = 0
which contradicts the choice of %.

82 Variational Inequalities
Now, fix h with
inff(u) : u ∈ Zh, ‖u‖ nn−1
= %)
> f(0)
and set Z = Zh and Vh = Wh+h. Then Z satisfies assumption (a) ofTheorem D.3 for some α > f(0).
Finally, since Vh is finite-dimensional,
‖u‖G :=(∫
Ω
b0|u|qdx
) 1q
is a norm on Vh equivalent to the norm of BV (Ω;RN ). Then, combin-ing (2.44) with (d) of Lemma 2.3, we see that also assumption (b) ofTheorem D.3 is satisfied.
Therefore there exists a sequence (uh) of critical points for f withf(uh) → +∞ and, by Theorems D.2 and 2.3, the result follows.
2.4 Historical notes and comments
The space of functions of bounded variations is very useful in the cal-culus of variations (geometric measure theory, fracture mechanics andimage processing), as well as in the study of shock waves for nonlinearhyperbolic conservation laws.

3
Nonlinear Eigenvalue Problems
All truths are easy tounderstand once they arediscovered; the point is todiscover them.
Galileo Galilei (1564–1642)
The study of nonlinear eigenvalue problems for quasilinear operatorson unbounded domains involving the p-Laplacian is motivated by var-ious applications, for instance, in Fluid Mechanics, in mathematicalmodels of the torsional creep, in nonlinear field equations from quan-tum mechanics. For instance, in fluid mechanics, the shear stress ~τ
and the velocity gradient ∇pu of certain fluids obey a relation of theform ~τ(x) = a(x)∇pu(x), where ∇pu = |∇u|p−2∇u and p > 1 is anarbitrary real number. The case p = 2 (respectively p < 2, p > 2)corresponds to a Newtonian (respectively pseudo-plastic, dilatant) fluid.Then the resulting equations of motion involve div (a∇pu), which re-duces to a∆pu = adiv (∇pu), provided that a is a constant. The p-Laplace operator appears in the study of flows through porous media(p = 3/2, see Showalter-Walkington [275]) or glacial sliding (p ∈ (1, 4/3],see Pelissier-Reynaud [236]). We also refer to Aronsson-Janfalk [13] forthe mathematical treatment of the Hele-Shaw flow of “power-law flu-ids”. The concept of Hele-Shaw flow corresponds to a flow betweentwo closely-spaced parallel plates, where the gap between the plates issmall compared to the dimension of the plates. Quasilinear problemswith a variable coefficient also appear in mathematical models of tor-sional creeps (elastic for p = 2, plastic as p → ∞, see Bhattacharya-DiBenedetto-Manfredi [38] and Kawohl [155]). This study is based onthe observation that a prismatic material rod subject to a torsional mo-
83

84 Nonlinear Eigenvalue Problems
ment, at sufficiently high temperature and for an extended period oftime, exhibits a permanent deformation, called creep. The correspond-ing equations are derived under the assumptions that the components ofstrain and stress are linked by a power law referred to as the creep-lawsee Kachanov [151, Chapters IV, VIII], [152], and Findley-Lai-Onaran[120]). A nonlinear field equation in quantum mechanics involving thep-Laplacian, for p = 6, has been proposed in Benci-Fortunato-Pisani[34].
In this chapter we are concerned to study the following quasilineareigenvalue problem
(Pλ,µ) −div (a(x)|∇u|p−2∇u) = λα(x, u) + β(x, u) in Ω,
a(x)|∇u|p−2∇u · n + b(x)|u|p−2u = µh(x, u) on Γ ,
where Ω ⊂ RN is an unbounded domain with (possible noncompact)smooth boundary Γ, n denotes the unit outward normal on Γ, a ∈L∞(Ω), b : Γ → R, α, β : Ω × R → R and h : Γ × R → R are functionswhich satisfy some growth conditions and λ, µ ∈ R are parameters. Ouraim is to study the existence and multiplicity of the solutions of problem(Pλ,µ) for different values of the parameters λ, µ ∈ R and for variousfunctions α, β and h. Eigenvalue problems involving the p-Laplacianhave been the subject of much recent interest, see for example the pa-pers of Allegretto-Huang [4], Anane [11], Drabek [92], Drabek-Pohozaev[94], Drabek-Simader [95], Garcıa-Montefusco-Peral [122], Garcıa-Peral[123].
In the first section we describe the weighted Sobolev spaces, where wedefine the energy functional associated to the problem (Pλ,µ). In thenext section our attention is focused to prove existence and multiplicityresult for problem (Pλ,µ), when µ = 1, using the Mountain Pass The-orem, and Ljusternik-Schnirelmann theory. In the following section westudy the problem (Pλ,µ), when λ = µ. Using the Mountain Pass typeresult proved by Motreanu, we prove the problem has a nontrivial solu-tions. In the last parts of this chapter we prove that the problem (Pλ,µ)has two nontrivial weak solutions if the parameters λ and µ belongs tosome interval.

3.1 Weighted Sobolev spaces 85
3.1 Weighted Sobolev spaces
Let Ω ⊂ RN be an unbounded domain with smooth boundary Γ. Weassume that p, q and m are real numbers satisfying
1 < p < N, p < q < p∗ =Np
N − p, (p∗ = +∞, if p ≥ N), (3.1)
and
q ≤ m <p(N − 1)N − p
if p < N (q ≤ m < +∞, when p ≥ N). (3.2)
Let C∞δ (Ω) be the space of C∞0 (RN )-functions restricted on Ω.We define the weighted Sobolev space E as the completion of C∞δ (Ω)
in the norm
‖u‖E =
∫
Ω
(|∇u(x)|p +
1(1 + |x|)p
|u(x)|p)
dx
1/p
.
Denote by Lp(Ω; w1) and Lm(Γ; w2) the weighted Lebesgue spaces withweight functions
wi(x) = (1 + |x|)βi , (i = 1, 2), (3.3)
and the norms defined by
‖u‖pp,w1
=∫
Ω
w1|u(x)|p dx, ‖u‖qq,w2
=∫
Γ
w2|u(x)|q dx
where
−N < β1 < −p, if p < N (β1 < −p, when p ≥ N), (3.4)
−N < β2 < qN − p
p−N + 1, if p < N (−N < β2 < 0, when p ≥ N).
(3.5)We have the following weighted Hardy-type inequality.
Lemma 3.1 Let 1 < p < N . Then, there exist positive constants C1
and C2, such that for every u ∈ E it holds∫
Ω
1(1 + |x|)p
|u|p dx ≤ C1
∫
Ω
|∇u|p dx + C2
∫
Γ
|n · x|(1 + |x|)p
|u|p dΓ . (3.6)

86 Nonlinear Eigenvalue Problems
Proof Using the divergence theorem we obtain for u ∈ C∞δ (Ω)∫
Ω
x·∇(
1(1 + |x|)p
|u|p)
dx =∫
Γ
(n·x)1
(1 + |x|)p|u|p dΓ−N
∫
Ω
1(1 + |x|)p
|u|p dx .
This implies
N
∫
Ω
1(1 + |x|)p
|u|p dx ≤∫
Γ
|n · x|(1 + |x|)p
|u|p dΓ + p
∫
Ω
1(1 + |x|)p
|u|p dx
+p
∫
Ω
1(1 + |x|)p−1
|u|p−1|∇u| dx .
Using Holder’s and Young’s inequalities, the last term can be estimatedby
p
(∫
Ω
1(1 + |x|)p
|u|p dx
)(p−1)/p (∫
Ω
|∇u|p dx
)1/p
≤ ε(p− 1)∫
Ω
1(1 + |x|)p
|u|p dx + ε1−p
∫
Ω
|∇u|p dx ,
where ε > 0 is an arbitrary real number. It follows that
(N−ε(p−1)−p)∫
Ω
1(1 + |x|)p
|u|p dx ≤ ε1−p
∫
Ω
|∇u|p dx+∫
Γ
|n · x|(1 + |x|)p
|u|p dΓ ,
and for ε small enough, the desired inequality follows by standard densityarguments.
In this chapter we shall use the following embedding result, see Pfluger[237] and [238].
Theorem 3.1 If
p ≤ r ≤ pN
N − pand −N < β1 ≤ r
N − p
p−N , (3.7)
then the embedding E → Lr(Ω;w1) is continuous. If the upper boundsfor r in (3.7) are strict, then the embedding is compact. If
p ≤ q ≤ p(N − 1)N − p
and −N < β2 ≤ qN − p
p−N + 1 , (3.8)
then the trace operator E → Lq(Γ; w2) is continuous. If the upper boundsfor q in (3.8) are strict, then the trace operator is compact.
As a corollary of Lemma 3.1 and Theorem 3.1 we obtain:

3.1 Weighted Sobolev spaces 87
Lemma 3.2 Let b satisfyingc
(1 + |x|)p−1≤ b(x) ≤ C
(1 + |x|)p−1for
some constants 0 < c ≤ C. Then
‖u‖pb =
∫
Ω
a(x)|∇u|p dx +∫
Γ
b(x)|u|p dΓ
defines an equivalent norm on E.
Proof The inequality ‖u‖E ≤ C1‖u‖b follows directly from Lemma 3.1,while Theorem 3.1 (for p = q and β2 = −(p− 1)) implies
‖u‖pb ≤ ‖a‖L∞
∫
Ω
|∇u|pdx + C
∫
Γ
|u|p(1 + |x|)−(p−1)dΓ
≤ ‖a‖L∞
∫
Ω
|∇u|pdx + C2‖u‖pE ,
which shows the desired equivalence.
We assume that h : Γ × R → R is a Caratheodory function thatsatisfies the following conditions:(H) |h(x, s)| ≤ h0(x) + h1(x)|s|m−1; p ≤ m < p · N − 1
N − p , where hi :Γ → R are nonnegative, measurable functions such that
0 ≤ hi(x) ≤ Chw2 a.e., h0 ∈ Lm/(m−1)(Γ; w1/(1−m)2 ),
where −N < β2 < m · N − pp −N + 1 and w2 is defined as in (3.3).
Set H(x, s) =∫ s
0
h(x, t)dt. We denote by Nh, NH the corresponding
Nemytskii operators.
Lemma 3.3 The operators
Nh : Lm(Γ; w2) → Lm/(m−1)(Γ; w1/(1−m)2 ), NH : Lm(Γ; w2) → L1(Γ)
are bounded and continuous.

88 Nonlinear Eigenvalue Problems
Proof Let m′ = m/(m− 1) and u ∈ Lm(Γ; w2). Then, by (H),∫
Γ
|Nh(u)|m′ · w1/(1−m)2 dΓ ≤
≤ 2m′−1
∫
Γ
hm′0 · w1/(1−m)
2 dΓ +∫
Γ
hm′1 |u|m · w1/(1−m)
2 dΓ
≤
≤ 2m′−1
C + Ch ·
∫
Γ
|u|m · w2 dΓ
,
which shows that Nh is bounded. In a similar way we obtain∫
Γ
|NH(u)| dΓ ≤∫
Γ
h0|u| dΓ +∫
Γ
h1|u|m dΓ ≤
≤
∫
Γ
hm′0 · w1/(1−m)
2 dΓ
1/m′
·
∫
Γ
|u|m · w2 dΓ
1/m
+ Cg ·∫
Γ
|u|m · w2 dΓ,
which imply the boundedness of NH.From the usual properties of Nemytskii operators we deduce the con-
tinuity of Nh and NH.
3.2 Eigenvalue problems
We suppose that p, q and m are real numbers satisfying the conditions(3.1) and (3.2). In this section we consider the particular case for (Pλ,µ),when α(x, u) = f(x)|u|p−2u, β(x, u) = g(x)|u|q−2u and µ = 1. In thiscase problem (Pλ,µ) becomes
(Pλ) −div (a(x)|∇u|p−2∇u) = λf(x)|u|p−2u + g(x)|u|q−2u in Ω,
a(x)|∇u|p−2∇u · n + b(x)|u|p−2u = h(x, u) on Γ ,
where n denotes the unit outward normal on Γ, 0 < a0 ≤ a, wherea ∈ L∞(Ω) and b : Γ → R is a continuous function satisfying
c
(1 + |x|)p−1≤ b(x) ≤ C
(1 + |x|)p−1,
for some constants 0 < c ≤ C.We assume that f and g are nontrivial measurable functions satisfying
0 ≤ f(x) ≤ C(1+|x|)α1 and 0 ≤ g(x) ≤ C(1+|x|)α2 , for a.e. x ∈ Ω,

3.2 Eigenvalue problems 89
where the numbers α1, α2 satisfy the conditions
−N < α1 < −p, if p < N(α1 < −p, when p ≥ N), (3.9)
and
−N < α2 < qN − p
p−N +1, if p < N (−N < α2 < 0, when p ≥ N).
(3.10)The mapping h : Γ×R→ R is a Caratheodory function which fulfills
the assumption
(H1) |h(x, s)| ≤ h0(x) + h1(x)|s|m−1,
where hi : Γ → R (i = 0, 1) are measurable functions satisfying
h0 ∈ Lm/(m−1)(Γ; w1/(1−m)3 ) and 0 ≤ hi ≤ Chw3 a.e. on Γ,
and w3 = (1 + |x|)α3 , where α3 satisfies the conditions
−N < α3 < mN − p
p−N +1, if p < N (−N < α3 < 0 when p ≥ N).
(3.11)We also assume:
(H2) lims→0
h(x, s)b(x)|s|p−1
= 0 uniformly in x.
(H3) There exists µ ∈ (p, q] such that
µH(x, t) ≤ th(x, t) for a.e. x ∈ Γ and every t ∈ R .
(H4) There exists a nonempty open set U ⊂ Γ with H(x, t) > 0 for
(x, t) ∈ U × (0,∞), where H(x, t) =∫ t
0
h(x, s) ds.
By a weak solution of problem (Pλ) we mean a function u ∈ E suchthat for any v ∈ E it holds
∫
Ω
a(x)|∇u|p−2∇u∇v dx +∫
Γ
b(x)|u|p−2uv dS
= λ
∫
Ω
f(x)|u|p−2uvdx +∫
Ω
g(x)|u|q−2uvdx +∫
Γ
h(x, u)vdS.
The energy functional corresponding to (Pλ) is defined as Eλ : E → R
Eλ(u) =1p
∫
Ω
a(x)|∇u|p dx +1p
∫
Γ
b(x)|u|p dS
− λ
p
∫
Ω
f(x)|u|p dx−∫
Γ
H(x, u) dS − 1q
∫
Ω
g(x)|u|q dx.

90 Nonlinear Eigenvalue Problems
By Lemma 3.2 we have ‖ · ‖b ' ‖ · ‖E . We may write
Eλ(u) =1p‖u‖p
b −λ
p
∫
Ω
f(x)|u|p dx−∫
Γ
H(x, u) dS − 1q
∫
Ω
g(x)|u|q dx.
Since p < q < p∗, −N < α1 < −p and −N < α2 < q N−pp − N , we
can apply Theorem 3.1 and obtain that the embedding E → Lp(Ω; w1),E → Lq(Ω; w2) and E → Lq(Γ;ww) are compact. So, the functional Eλ
is well defined.
Lemma 3.4 Under the assumptions (H1)-(H4), the functional Eλ isFrechet differentiable on E and satisfies the Palais-Smale condition.
Proof Denote I(u) = 1p‖u‖p
b , KH(u) =∫
Γ
H(x, u) dS, KΨ(u) =∫
Ω
Ψ(x, u) dx
and KΦ(u) =∫
Ω
Φ(x, u) dx, where Φ(x, u) = 1pf(x)|u|p and Ψ(x, u) =
1q g(x)|u|q.
Then the directional derivative of E ′λ in the direction v ∈ E is
〈E ′λ(u), v〉 = 〈I ′(u), v〉 − λ〈K ′Φ(u), v〉 − 〈K ′
Ψ(u), v〉 − 〈K ′H(u), v〉,
where
〈I ′(u), v〉 =∫
Ω
a(x)|∇u|p−2∇u∇v dx +∫
Γ
b(x)|u|p−2uv dS,
〈K ′H(u), v〉 =
∫
Γ
h(x, u)v dS,
〈K ′Ψ(u), v〉 =
∫
Ω
g(x)|u|q−2uv dx,
〈K ′Φ(u), v〉 =
∫
Ω
f(x)|u|p−2uv dx.
Clearly, I ′ : E → E? is continuous. The operator K′H is a composition
of the operators
K′H : E → Lm(Γ; w3)
Nh→ Lm/(m−1)(Γ; w1/(1−m)3 ) l→ E?
where 〈l(u), v〉 =∫
Γ
uv dS. Since
∫
Γ
|uv| dS ≤(∫
Γ
|u|m′w
1/(1−m)3 dS
)1/m′
·(∫
Γ
|v|mw3 dS
)1/m
,

3.2 Eigenvalue problems 91
then by Theorem 3.1 l is continuous. As a composition of continuousoperators, K
′H is continuous, too. Moreover, by our assumptions on w3,
the trace operator E → Lm(Γ; w3) is compact and therefore, K′H is also
compact.Set ϕ(u) = f(x) |u|p−2u. Lemma 3.3 implies that that the Nemytskii
operator corresponding to any function which satisfies (H1) is boundedand continuous. Hence Nh and Nϕ are bounded and continuous. Notethat
K′Φ : E ⊂ Lp(Ω; w1)
Nϕ→ Lp/(p−1)(Ω; w1/(1−p)1 )
η→ E?,
where 〈η(u), v〉 =∫
Ω
uv dx. Since
∫
Ω
|uv| dx ≤(∫
Ω
|u|p/(p−1)w1/(1−p)1 dx
)(p−1)/p
·(∫
Ω
|v|pw1 dx
)1/p
,
it follows that η is continuous. But K′Φ is the composition of three
continuous operators and by the assumptions on w1, the embeddingE → Lp(Ω; w1) is compact. This implies that K
′Φ is compact. In a sim-
ilar way we obtain that K′Ψ is compact and this implies the continuous
Frechet differentiability of Eλ.Now, let un ∈ E be a Palais-Smale sequence, that is,
|Eλ(un)| ≤ C for all n (3.12)
and
‖E ′λ(un)‖E? → 0 as n →∞. (3.13)
We first prove that un is bounded in E. Remark that (3.13) impliesthat
|〈E ′λ(un), un〉| ≤ µ · ‖un‖b for n large enough.
Then by (3.12) we obtain
C + ‖un‖b ≥ Eλ(un)− 1µ〈E ′λ(un), un〉. (3.14)
But
〈E ′λ(un), un〉 =∫
Ω
a(x)|∇un|p dx +∫
Γ
b(x)|un|p dS
− λ
∫
Ω
f(x)|un|p dx−∫
Ω
g(x)|un|q dx−∫
Γ
h(x, un)un dS.

92 Nonlinear Eigenvalue Problems
We have
Eλ(un)− 1µ〈E ′λ(un), un〉 =
(1p− 1
µ
)(‖un‖p
b − λ
∫
Ω
f(x)|u|pdx
)
−(∫
Γ
H(x, un) dS − 1µ
∫
Γ
h(x, un)un dS
)−
(1q− 1
µ
) ∫
Ω
g(x)|un|q dx).
By (H3) we deduce that∫
Γ
H(x, un) dS ≤ 1µ
∫
Γ
h(x, un)un dS. (3.15)
Therefore
Eλ(un)− 1µ〈E ′λ(un), un〉 ≥
(1p− 1
µ
)C0‖un‖p
b . (3.16)
Relations (3.14) and (3.16) yield
C + ‖un‖b ≥(
1p− 1
µ
)C0‖un‖p
b .
This shows that un is bounded in E.To prove that un contains a Cauchy sequence we use the following
well-known inequalities:
|ξ − ζ|p ≤ C(|ξ|p−2ξ − |ζ|p−2ζ)(ξ − ζ), for p ≥ 2, (3.17)
|ξ − ζ|2 ≤ C(|ξ|p−2ξ − |ζ|p−2ζ)(ξ − ζ)(|ξ|+ |ζ|)2−p, for 1 < p < 2,
(3.18)for every ξ, ζ ∈ RN .
In the case p ≥ 2 we obtain:
‖un − uk‖pb =
∫
Ω
a(x)|∇un −∇uk|p dx +∫
Γ
b(x)|un − uk|p dS
≤ C(〈I ′(un), un − uk〉 − 〈I ′(uk), un − uk〉)= C(〈E ′λ(un), un − uk〉 − 〈E ′λ(uk), un − uk〉
+ λ〈K ′Φ(un), un − uk〉 − λ〈K ′
Φ(uk), un − uk〉+ 〈K ′
H(un), un − uk〉 − 〈K′H(uk), un − uk〉
+ 〈K ′Ψ(un), un − uk〉 − 〈K ′
Ψ(uk), un − uk〉)≤ C(‖E ′λ(un)‖E? + ‖E ′λ(uk)‖E? + |λ| ‖K ′
Φ(un)−K′Φ(uk)‖E?
+ ‖K ′H(un)−K
′H(uk)‖E? + ‖K ′
Ψ(un)−K′Ψ(uk)‖E?)‖un − uk‖b.
Since E ′λ(un) → 0 and K′Φ, K ′
Ψ, K ′H are compact, we conclude (passing
eventually to a subsequence) that un converges in E.

3.2 Eigenvalue problems 93
If 1 < p < 2, then we use the estimate
‖un−uk‖2b ≤ C ′|〈I ′(un), un−uk〉−〈I ′(uk), un−uk〉|(‖un‖2−pb +‖uk‖2−p
b ).(3.19)
Since ‖un‖b is bounded, the same arguments lead to a convergentsubsequence. In order to prove the estimate (3.19) we recall the followingresult: for all s ∈ (0,∞) there is a constant Cs > 0 such that
(x + y)s ≤ Cs(xs + ys) for any x, y ∈ (0,∞). (3.20)
Then we obtain
‖un − uk‖2b =(∫
Ω
a(x)|∇un −∇uk|p dx +∫
Γ
b(x)|un − uk|p dS
) 2p
≤ Cp
[(∫
Ω
a(x)|∇un −∇uk|p dx
) 2p
+(∫
Γ
b(x)|un − uk|p dS
) 2p
].
(3.21)Using (3.18), (3.20) and the Holder inequality we find

94 Nonlinear Eigenvalue Problems
∫
Ω
a(x)|∇un −∇uk|p dx =∫
Ω
a(x)(|∇un −∇uk|2)p2 dx
≤ C
∫
Ω
a(x)((|∇un|p−2∇un − |∇uk|p−2∇uk)(∇un −∇uk)
) p2
× (|∇un|+ |∇uk|)p(2−p)
2 dx
= C
∫
Ω
(a(x)(|∇un|p−2∇un − |∇uk|p−2∇uk)(∇un −∇uk)
) p2
× (a(x)(|∇un|+ |∇uk|)p)2−p2 dx
≤ C
(∫
Ω
a(x)(|∇un|p−2∇un − |∇uk|p−2∇uk)(∇un −∇uk) dx
) p2
×(∫
Ω
a(x)(|∇un|+ |∇uk|)p dx
) 2−p2
≤ Cp
(∫
Ω
a(x)|∇un|p dx +∫
Ω
a(x)|∇uk|p dx
) 2−p2
(∫
Ω
a(x)(|∇un|p−2∇un − |∇uk|p−2∇uk)(∇un −∇uk) dx
) p2
≤ Cp
[(∫
Ω
a(x)|∇un|p dx
) 2−p2
+(∫
Ω
a(x)|∇uk|p dx
) 2−p2
]
×(∫
Ω
a(x)(|∇un|p−2∇un − |∇uk|p−2∇uk)(∇un −∇uk) dx
) p2
≤ Cp
[∫
Ω
a(x)(|∇un|p−2∇un − |∇uk|p−2∇uk)(∇un −∇uk) dx
] p2
×(‖un‖
(2−p)p2
b + ‖uk‖(2−p)p
2b
).
Using the last inequality and (3.20) we have the estimate
(∫
Ω
a(x)|∇un −∇uk|p dx
) 2p
(3.22)
≤ C ′p
(∫
Ω
a(x)(|∇un|p−2∇un − |∇uk|p−2∇uk)(∇un −∇uk) dx
)
·(‖un‖2−pb + ‖uk‖2−p
b ).

3.2 Eigenvalue problems 95
In a similar way we can obtain the estimate
(∫
Γ
b(x)|un − uk|p dS
) 2p
≤ C′p
(∫
Γ
b(x)(|un|p−2un − |uk|p−2uk)(un − uk) dx
)
(3.23)
·(‖un‖2−pb + ‖uk‖2−p
b ).
It is now easy to observe that the inequalities (3.21), (3.22) and (3.23)imply the estimate (3.19). The proof of Lemma 3.4 is complete.
Define
λ := infu∈E; u 6=0
∫
Ω
a(x)|∇u|p dx +∫
Γ
b(x)|u|p dS∫
Ω
f(x)|u|p dx
.
We have the following existence result.
Theorem 3.2 Assume that the conditions (H1)-(H4) hold. Then, forevery λ < λ, problem (Pλ) has a nontrivial weak solution.
Our hypothesis λ < λ implies the existence of some C0 > 0 such that,for every v ∈ E
‖v‖pb − λ
∫
Ω
f(x)|v|pdx ≥ C0‖v‖pb . (3.24)
Proof of Theorem 3.2. We have to verify the geometric assumptionsof the mountain pass theorem, see Theorem 1.7. First we show thatthere exist positive constants R and c0 such that
Eλ(u) ≥ c0, for any u ∈ E with ‖u‖ = R. (3.25)
By Theorem 3.1 there exists A > 0 such that
‖u‖qq,w2
≤ A‖u‖qb for all u ∈ E.
This inequality together with (3.24) imply that
Eλ(u) =1p
(‖u‖pb − λ‖u‖p
p,w1
)− 1q
∫
Ω
g(x)|u|q dx−∫
Γ
H(x, u) dS
≥ C0
p‖u‖p
b −A
q‖u‖q
b −∫
Γ
H(x, u) dS.

96 Nonlinear Eigenvalue Problems
By (H1) and (H2) we deduce that for every ε > 0 there exists Cε > 0such that
1q|g(x)||u|q ≤ εb(x)|u|p + Cεw3(x)|u|m.
Consequently,
Eλ(u) ≥ C0
p‖u‖p
b −A
q‖u‖q
b −∫
Γ
(εb(x)|u|p + Cεw3(x)|u|m) dS
≥ C0
p‖u‖p
b −A
q‖u‖q
b − εc1‖u‖pb − CεC2‖u‖m
b .
For ε > 0 and R > 0 small enough, we deduce that for every u ∈ E with‖u‖b = R we have Eλ(u) ≥ c0 > 0, which yields (3.25).
In what follows we verify the second geometric assumption of Theorem1.7, namely
∃v ∈ E with ‖v‖ > R such that Eλ(v) < c0. (3.26)
Choose ψ ∈ C∞δ (Ω), ψ ≥ 0, such that ∅ 6= suppψ ∩ Γ ⊂ U . From
1qg(x)uq ≥ c3u
µ − c4 on (u, s) ∈ U × (0,∞)
and (H1) we claim that
Eλ(tψ) =tp
p
(‖ψ‖pb − λ‖ψ‖p
p,w1
)− 1q
∫
Ω
g(x)|tψ|q dx−∫
Γ
H(x, tψ) dS
≤ tp
p
(‖ψ‖pb − λ‖ψ‖p
p,w1
)− c3tµ
∫
U
ψµ dS + c4|U | − tq
q
∫
Ω
w2ψq dx.
Since q ≥ µ > p, we obtain Eλ(tψ) → −∞ as t → ∞. It follows that ift > 0 is large enough, Eλ(tψ) < 0, so v = tψ satisfies (3.26).
By Theorem 1.7 it follows that problem (Pλ) has a nontrivial weaksolution.¤
3.3 Superlinear case
We assume throughout this section that p, q, r and α1 are real numberssatisfying
1 < p < N, p < q < r < p? =pN
N − p, −N < α1 < q
N − p
p−N.
(3.27)

3.3 Superlinear case 97
Also, we consider a ∈ L∞(Ω) and b ∈ L∞(Γ) such that
a(x) ≥ a0 > 0, for a.e. x ∈ Ω, (3.28)
and
c
(1 + |x|)p−1≤ b(x) ≤ C
(1 + |x|)p−1, for a.e. x ∈ Γ, where c, C > 0.
(3.29)We assume that h : Γ × R → R is a Caratheodory function, which
satisfies the following conditions:(h1) h(·, 0) = 0, h(x, s) + h(x,−s) ≥ 0, for a.e. x ∈ Γ and for anys ∈ R;(h2) h(x, s) ≤ h0(x) + h1(x)|s|m−1, p ≤ m < pN−1
N−p , where hi : Γ →R, i = 1, 2 are nonnegative, measurable functions such that
0 ≤ hi(x) ≤ Chw2, a.e. g0 ∈ Lm/(m−1)(Γ; w1/(m−1)2 ),
where −N < α2 < m · N − p
p−N + 1 and w2 = (1 + |x|)α2 .
Set H(x, s) =∫ s
0
h(x, t)dt. We denote by Hh, NH the corresponding
Nemytskii operators. From Lemma 3.3 and condition (h2) it followsthat the operators Hh, NH are bounded and continuous.
In this section we consider the following double eigenvalue problem:
(P′λ,µ)
−div (a(x)|∇u|p−2∇u) + h(x)|u|r−2u = λ(1 + |x|)α1 |u|q−2u in Ω ⊂ RN ,
a(x)|∇u|p−2∇u · n + b(x) · |u|p−2u = µg(x, u) on Γ ,
u ≥ 0, u 6≡ 0 in Ω .
Let χ : Ω → R be a positive and continuous function satisfying∫
Ω
wr/(r−q)1
χq/(r−q)dx < ∞. (3.30)
Define the Banach space
X = u ∈ E :∫
Ω
χ(x)|u|r dx < ∞
endowed with the norm
‖u‖pX = ‖u‖p
b +
∫
Ω
χ(x)|u(x)|r dx
p/r
.

98 Nonlinear Eigenvalue Problems
The energy functional Φ : X → R corresponding to problem (Pλ,µ) isgiven by
Φ(u) =1p
∫
Ω
a(x)|∇u|p dx +1p
∫
Γ
b(x)|u|p dΓ− λ
q
∫
Ω
w1|u|q dx +
+1r
∫
Ω
χ(x)|u|r dx− µ
∫
Γ
H(x, u) dΓ.
Theorem 3.1 implies that Φ is well defined. The solutions of problem(Pλ,µ) will be found as critical points of Φ. Therefore, a function u ∈ X
is a solution of problem (Pλ,µ) provided that for any v ∈ X it holds∫
Ω
a|∇u|p−2∇u·∇v+∫
Γ
b|u|p−2uv = λ
∫
Ω
w1|u|p−2uv−∫
Ω
χ|u|p−2uv+µ
∫
Γ
hv .
We have the following result.
Theorem 3.3 Assume hypotheses (3.27), (3.28), (3.29), (3.30), (h1)and (h2) hold. Then there exist real numbers µ∗, µ∗ and λ∗ > 0 such thatproblem (P ′λ,µ) has no nontrivial solution, provided that µ∗ < µ < µ∗
and 0 < λ < λ∗.
Proof Suppose that u is a solution in X of (P ′λ,µ). Then u satisfies
∫
Ω
a(x)|∇u|p dx +∫
Γ
b(x)|u|p dΓ− µ
∫
Γ
h(x, u)u dΓ + (3.31)
+∫
Ω
χ(x)|u|r dx = λ
∫
Ω
w1|u|q dx.
It follows from Young’s inequality that
λ
∫
Ω
w1|u|q dx =∫
Ω
λw1
χq/r·χq/r|u|q dx ≤ r − q
rλr/(r−q)
∫
Ω
wr/(r−q)1
χq/(r−q)dx+
q
r
∫
Ω
χ|u|r dx.
This combined with (3.31) gives
‖u‖pb − µ
∫
Γ
h(x, u)u dΓ ≤ r − q
rλr/(r−q)
∫
Ω
wr/(r−q)1
χq/(r−q)dx +(3.32)
+q − r
r
∫
Ω
χ|u|r dx ≤ r − q
rλr/(r−q)
∫
Ω
wr/(r−q)1
χq/(r−q)dx.

3.3 Superlinear case 99
Set
A = u ∈ X :∫
Γ
h(x, u)u dΓ < 0, B = u ∈ X :∫
Γ
h(x, u)u dΓ > 0,
µ∗ = supu∈A
‖u‖pb∫
Γ
h(x, u)u dΓ, µ∗ = inf
u∈B
‖u‖pb∫
Γ
h(x, u)u dΓ. (3.33)
We introduce the convention that, if A = ∅, then µ∗ = −∞ and if B = ∅,then µ∗ = +∞.
We show that, if we take µ? < µ < µ?, then there exists C0 > 0 suchthat
C0‖u‖pb ≤ ‖u‖p
b − µ
∫
Γ
h(x, u)u dΓ for all u ∈ X. (3.34)
If µ < µ∗, then there exists a constant C1 ∈ (0, 1) such that
µ ≤ (1− C1)µ∗ ≤ (1− C1)‖u‖p
b∫
Γ
h(x, u)u dΓfor all u ∈ B,
which implies
‖u‖pb − µ
∫
Γ
h(x, u)u dΓ ≥ C1‖u‖pb for all u ∈ B. (3.35)
If µ∗ < µ, then there exists a constant C2 ∈ (0, 1) such that
(1− C2)‖u‖p
b∫
Γ
h(x, u)u dΓ≤ (1− C2)µ∗ ≤ µ for all u ∈ A,
which yields
‖u‖pb − µ
∫
Γ
h(x, u)u dΓ ≥ C2‖u‖pb for all u ∈ A. (3.36)
From (3.35) and (3.36) we conclude that
‖u‖pb − µ
∫
Γ
h(x, u)u dΓ ≥ minC1, C2‖u‖pb for all u ∈ X
and taking C0 = minC1, C2 we obtain (3.34).

100 Nonlinear Eigenvalue Problems
By (3.31), (3.34) and Theorem 3.1 we have
C0C
∫
Ω
w1|u|q dx
p/q
≤ C0‖u‖pb ≤ λ
∫
Ω
w1|u|q dx, (3.37)
for some constant C > 0. This inequality implies
(Cλ−1C0)q/(q−p) ≤∫
Ω
w1|u|q dx,
which combined with (3.37) yields
C0C(Cλ−1C0)p/(q−p) ≤ C0‖u‖pb .
Combining this with (3.32) and (3.34) we obtain
C0C(Cλ−1C0)p/(q−p) ≤ r − q
rλr/(r−q)
∫
Ω
wr/(r−q)1
χq/(r−q)dx.
By taking
λ∗ =
(C0C)q/(q−p) r
r − q
∫
Ω
wr/(r−q)1
χq/(r−q)dx
−1
(r−q)(q−p)q(r−p)
,
the result follows.
Set
U = u ∈ X :∫
Γ
H(x, u) dΓ < 0, V = u ∈ X :∫
Γ
H(x, u) dΓ > 0,
µ− = supu∈U
‖u‖pb
p
∫
Γ
H(x, u) dΓ, µ+ = inf
u∈V
‖u‖pb
p
∫
Γ
H(x, u) dΓ. (3.38)
If U = ∅ (resp. V = ∅), then we set µ− = −∞ (resp. µ+ = +∞).Proceeding in the same manner as we did for proving (3.34), we canshow that if we take µ− < µ < µ+, then there exists c > 0 such that
1p‖u‖p
b − µ
∫
Γ
H(x, u) dΓ ≥ c‖u‖pb for all u ∈ X. (3.39)

3.3 Superlinear case 101
In what follows we employ the following elementary inequality
k|u|β − χ|u|γ ≤ Cβ,γk
(k
χ
) βγ−β
, ∀u ∈ R, ∀χ, k ∈ (0,∞), ∀0 < β < γ .
(3.40)
Proposition 3.1 If µ− < µ < µ+, then the functional Φ is coercive.
Proof By virtue of (3.40) we have
∫
Ω
(λ
q|u|qw1 − χ
2r|u|r
)dx ≤ Cr,q
∫
Ω
λw1
(λw1
χ
)q/(r−q)
dx
= Cr,qλr/(r−q)
∫
Ω
wr/(r−q)1
hq/(r−q)dx.
Using (3.39) it follows that
Φ(u) =1p‖u‖p
b − µ
∫
Γ
H(x, u) dΓ−∫
Ω
(λ
q|u|qw1 − χ
2r|u|r
)dx
+12r
∫
Ω
χ|u|r dx ≥ c‖u‖pb +
12r
∫
Ω
χ|u|r dx− C1
and the coercivity of Φ follows.
Proposition 3.2 Suppose µ− < µ < µ+ and let un be a sequence inX such that Φ(un) is bounded. Then there exists a subsequence of un,relabeled again by un, such that un u0 in X and
Φ(u0) ≤ lim infn→∞
Φ(un).
Proof Since Φ is coercive in X we see that the boundedness of Φ(un)implies that ‖un‖b and
∫
Ω
χ|un|r dx are bounded. From Theorem 3.1
we know that the embedding E → Lq(Ω; w1) is compact and using thefact that un is bounded in E we may assume that un u0 in E andun → u0 in Lq(Ω; w1).
Set F (x, u) = λq |u|qw1 − 1
r h|u|r and f(x, u) = Fu(x, u). A simple

102 Nonlinear Eigenvalue Problems
computation yields
fu(x, u) = (q−1)λ|u|q−2w1−(r−1)χ|u|r−2 ≤ Cr,qλw1
(λw1
χ
)(q−2)/(r−q)
,
(3.41)where the last inequality follows from (3.40). We obtain
Φ(u0) − Φ(un) =1p
∫
Ω
a(x)|∇u0|p dx +1p
∫
Γ
b(x)|u0|p dΓ
− 1p
∫
Ω
a(x)|∇un|p dx− 1p
∫
Γ
b(x)|un|p dΓ− µ
∫
Γ
G(x, u0) dΓ
+ µ
∫
Γ
H(x, un) dΓ +∫
Ω
(F (x, un)− F (x, u0)) dx = ‖u0‖pb − ‖un‖p
b
+ µ
∫
Γ
H(x, un) dΓ−∫
Γ
H(x, u0) dΓ
+∫
Ω
1∫
0
s∫
0
fu(x, u0 + t(un − u0)) dt ds
(un − u0)2 dx
≤ ‖u0‖pb − ‖un‖p
b + µ
∫
Γ
H(x, un) dΓ−∫
Γ
H(x, u0) dΓ
+ C2
∫
Ω
(un − u0)2w
(r−2)/(r−q)1
χ(q−2)/(r−q)dx,
where C2 = 12Cr,qλ
(r−2)/(r−q).We show that the last integral tends to 0 as n →∞. Indeed, applying
Holder’s inequality we obtain
∫
Ω
(un−u0)2w
(r−2)/(r−q)1
χ(q−2)/(r−q)dx ≤
∫
Ω
wr/(r−q)1
χq/(r−q)dx
(q−2)/q
·
∫
Ω
w1|un − u0|q dx
2/q
.
Since un → u0 in Lq(Ω; w1) we have
limn→∞
∫
Ω
(un − u0)2w
(r−2)/(r−q)1
χ(q−2)/(r−q)dx = 0. (3.42)
The compactness of the trace operator E → Lm(Γ; w2) and the con-tinuity of the Nemytskii operator NH : Lm(Γ; w2) → L1(Γ) imply

3.3 Superlinear case 103
NH(un) → NH(u0) in L1(Γ) i.e.∫
Γ
|NH(un) − NH(u0)| dΓ → 0 as
n →∞. It follows that
limn→∞
∫
Γ
H(x, un) dΓ =∫
Γ
H(x, u0) dΓ. (3.43)
Since the norm in E is lower semicontinuous with respect to the weaktopology our conclusion follows from (3.42) and (3.43).
Proposition 3.3 If µ∗ < µ < µ∗ and u is a solution of problem (P ′λ,µ),then
C0‖u‖pb +
r − q
r
∫
Ω
χ|u|r dx ≤ r − q
rλr/(r−q)
∫
Ω
wr/(r−q)1
χq/(r−q)dx
and
‖u‖b ≥ Kλ−1/(q−p),
where K > 0 is a constant independent of u.
Proof If u is a solution of (P ′λ,µ), then
‖u‖pb − µ
∫
Γ
h(x, u)u dΓ +∫
Ω
χ|u|r dx = λ
∫
Ω
w1|u|q dx ≤
≤ r − q
rλr/(r−q)
∫
Ω
wr/(r−q)1
χq/(r−q)dx +
q
r
∫
Ω
χ|u|r dx.
Using (3.34) we obtain the first part of the assertion.From Theorem 3.1 we have that there exists Cq > 0 such that
‖u‖qLq(Ω; w1)
≤ Cq‖u‖qb , for all u ∈ E.
The above inequality and (3.34) imply
‖u‖b ≥ C1/(q−p)0 C−1/(q−p)
q λ−1/(q−p).
By taking K = C1/(q−p)0 C
−1/(q−p)q the second assertion follows.
Theorem 3.4 Assume that hypotheses (3.27), (3.28), (3.29), (3.30),(h1) and (h2) hold. Set µ = maxµ∗, µ−, µ = minµ∗, µ+ and J =(µ, µ). Then there exists λ0 > 0 such that the following statements hold:
(i) problem (P ′λ,µ) admits a nontrivial solution, for any λ ≥ λ0 andevery µ ∈ J ;

104 Nonlinear Eigenvalue Problems
(ii) problem (P ′λ,µ) does not have any nontrivial solution, provided that0 < λ < λ0 and µ ∈ J .
Proof According to Propositions 3.1 and 3.2, Φ is coercive and lowersemicontinuous. Therefore, there exists u ∈ X such that Φ(u) = inf
XΦ(u).
To ensure that u 6≡ 0, we shall prove that infX
Φ < 0. Set
λ := infq
p‖u‖p
b−qµ
∫
Γ
H(x, u) dΓ+q
r
∫
Ω
χ|u|r dx : u ∈ X,
∫
Ω
w1|u|q dx = 1
.
First we check that λ > 0. For this aim we consider the constrainedminimization problem
M := inf ∫
Ω
a(x)|∇u|p dx +∫
Γ
b(x)|u|p dΓ : u ∈ E,
∫
Ω
w1|u|q dx = 1
.
Clearly, M > 0. Since X is embedded in E, we have∫
Ω
a(x)|∇u|p dx +∫
Γ
b(x)|u|p dΓ ≥ M
for all u ∈ X with∫
Ω
w1|u|q dx = 1. Now, applying the Holder inequality
we find
1 =∫
Ω
w1|u|q dx =∫
Ω
w1
χq/rhq/r|u|q dx ≤
∫
Ω
wr/(r−q)1
χq/(r−q)dx
(r−q)/r
·
∫
Ω
χ|u|r dx
q/r
.
(3.44)Relation (3.39) implies
q
p‖u‖p
b − q µ
∫
Γ
H(x, u) dΓ ≥ q c‖u‖pb .
By virtue of (3.44) we have
q
p‖u‖p
b − q µ
∫
Γ
H(x, u) dΓ +q
r
∫
Ω
χ|u|r dx ≥ qc‖u‖pb +
q
r
∫
Ω
χ|u|r dx ≥
≥ qcM +q
r
∫
Ω
wr/(r−q)1
χq/(r−q)dx
−(r−q)/q

3.3 Superlinear case 105
for all u ∈ X with∫
Ω
w1|u|q dx = 1. Then,
λ ≥ qcM +q
r
∫
Ω
wr/(r−q)1
χq/(r−q)dx
−(r−q)/q
and our claim follows.Let λ > λ. Then, there exists a function u ∈ X with
∫
Ω
w1|u|q dx = 1
such that
λ >q
p‖u‖p
b − qµ
∫
Γ
H(x, u) dΓ +q
r
∫
Ω
χ|u|r dx.
This can be rewritten as
Φ(u) =1p‖u‖p
b − µ
∫
Γ
H(x, u) dΓ +1r
∫
Ω
χ|u|r dx− λ
q
∫
Ω
w1|u|q dx < 0
and consequently infu∈X
Φ(u) < 0. By Propositions 3.1 and 3.2 it follows
that problem (P ′λ,µ) has a solution.We set
λ0 = infλ > 0 : (P ′λ,µ) admits a solution.Suppose λ0 = 0. Then by taking λ1 ∈ (0, λ∗) (where λ∗ is given byTheorem 3.3), we have that there exists λ such that problem (P ′
λ,µ)
admits a solution. But this is a contradiction, according to Theorem3.3. Consequently, λ0 > 0.
We now show that for each λ > λ0 problem (P ′λ,µ) admits a solution.Indeed, for every λ > λ0 there exists ρ ∈ (λ0, λ) such that problem(P ′ρ,µ) has a solution uρ which is a subsolution of problem (P ′λ,µ). Weconsider the variational problem
infΦ(u) : u ∈ X and u ≥ uρ.By Propositions 3.1 and 3.2 this problem admits a solution u. This min-imizer u is a solution of problem (P ′λ,µ). Since the hypothesis h(x, s) +h(x,−s) ≥ 0 for a.e. x ∈ Γ and for all s ∈ R implies that H(x, |u|) ≥H(x, u) (that is, Φ(|u|) ≤ Φ(u)), we may assume that u ≥ 0 on Ω. Itremains to show that problem (P ′λ0,µ) has also a solution. Let λn → λ0
and λn > λ0 for each n. Problem (P ′λn,µ) has a solution un for each n.By Proposition 3.3 the sequence un is bounded in X. Therefore we

106 Nonlinear Eigenvalue Problems
may assume that un u0 in X and un → u0 in Lq(Ω; w1). We havethat u0 is a solution of (P ′λ0,µ). Since un and u0 are solutions of (P ′λn,µ)and (P ′λ0,µ), respectively, we have
∫
Ω
a (x)(|∇un|p−2∇un − |∇u0|p−2∇u0)(∇un −∇u0) dx
+∫
Γ
b(x)(|un|p−2un − |u0|p−2u0)(un − u0) dΓ
+∫
Ω
χ(|un|r−2un − |u0|r−2u0)(un − u0) dx
= λn
∫
Ω
w1(|un|q−2un − |u0|q−2u0)(un − u0) dx
+ (λn − λ0)∫
Ω
w1|u0|q−2u0(un − u0) dx
+ µ
∫
Γ
(h(x, un)− h(x, u0))(un − u0) dΓ = J1,n + J2,n + J3,n,
where
J1,n = λn
∫
Ω
w1(|un|q−2un − |u0|q−2u0)(un − u0) dx,
J2,n = (λn − λ0)∫
Ω
w1|u0|q−2u0(un − u0) dx,
J3,n = µ
∫
Γ
(h(x, un)− h(x, u0))(un − u0) dΓ.
We have
|J1,n| ≤ supn≥1
λn
∫
Ω
w1|un|q−1|un − u0| dx +∫
Ω
w1|u0|q−1|un − u0| dx
and it follows from Holder’s inequality that
|J1,n| ≤ supn≥1
λn
[
∫
Ω
w1|un|q dx
(q−1)/q
·
∫
Ω
w1|un − u0|q dx
1/q
+

3.3 Superlinear case 107
+
∫
Ω
w1|u0|q dx
(q−1)/q
·
∫
Ω
w1|un − u0|q dx
1/q ].
We easily observe that J1,n → 0 as n →∞.From the estimate
|J2,n| ≤ |λn − λ0|
∫
Ω
w1|u0|q dx
(q−1)/q
·
∫
Ω
w1|un − u0|q dx
1/q
we obtain that J2,n → 0 as n →∞.Using the compactness of the trace operator E → Lm(Γ; w2), the
continuity of Nemytskii operator Nh : Lm(Γ; w2) → Lm/(m−1)(Γ; w1/(1−m)2 )
and the estimate∫
Γ
|h(x, un)− h(x, u0)| · |un − u0| dΓ ≤
≤
∫
Γ
|h(x, un)− h(x, u0)|m/(m−1)w1/(1−m)2 dΓ
(m−1)/m
·
∫
Γ
w2|un − u0|m dΓ
1/m
we see that J3,n → 0 as n →∞.So, we have proved that
limn→∞
(∫
Ω
a(x)(|∇un|p−2∇un − |∇u0|p−2∇u0)(∇un −∇u0) dx+
∫
Γ
b(x)(|un|p−2un − |u0|p−2u0)(un − u0) dΓ)
= 0.
Applying the inequality
|ξ − ζ|p ≤ C(|ξ|p−2ξ − |ζ|p−2ζ)(ξ − ζ), ∀ξ, ζ ∈ RN
we find
‖un − u0‖pb =
∫
Ω
a(x)|∇un −∇u0|p dx +∫
Γ
b(x)|un − u0|p dx ≤
≤ C(∫
Ω
a(x)(|∇un|p−2∇un − |∇u0|p−2∇u0)(∇un −∇u0) dx+
+∫
Γ
b(x)(|un|p−2un − |u0|p−2u0)(un − u0) dΓ)→ 0 as n →∞,

108 Nonlinear Eigenvalue Problems
which shows that ‖un‖b → ‖u0‖b. By Proposition 3.3 we have u0 6≡ 0.This concludes our proof.
3.4 Sublinear case
In this section we suppose that the conditions (3.27), (3.28) and (3.29)are fulfilled. For λ, µ > 0, we consider the following double eigenvalueproblem:
(P ′′λ,µ)
−div(a(x)|∇u|p−2∇u) = λf(x, u(x)) in Ω,
a(x)|∇u|p−2∇u · n + b(x)|u|p−2u = µg(x, u(x)) on Γ,
u 6= 0 in Ω.
We consider the following assumptions:
(F1) Let f : Ω × R → R be a Caratheodory function such that f(·, 0) = 0and
|f(x, s)| ≤ f0(x) + f1(x)|s|r−1,
where p < r <pN
N − p, and f0, f1 are measurable functions which
satisfy
0 < f0(x) ≤ Cfw1(x), and 0 ≤ f1(x) ≤ Cfw1(x) a.e. x ∈ Ω,
f0 ∈ Lr
r−1 (Ω; w1
1−r
1 );
(F2)
lims→0
f(x, s)f0(x)|s|p−1 = 0, uniformly in x ∈ Ω;
(F3) lim sups→+∞
1f0(x)|sp|F (x, s) ≤ 0 uniformly for all x ∈ Ω, max
|s|≤MF (·, s) ∈
L1(Ω) for all M > 0, where F denotes the primitive function of f with
respect to the second variable, i.e. F (x, u) =∫ u
0
f(x, s)ds;
(F4) there exist x0 ∈ Ω, R0 > 0 and s0 ∈ R such that min|x−x0|<R0
F (x, s0) >
0.

3.4 Sublinear case 109
(G1) Let g : Γ×R→ R be a a Caratheodory function such that g(·, 0) = 0and
|g(x, s)| ≤ g0(x) + g1(x)|s|m−1,
where p ≤ m < p · N − 1N − p
, and g0, g1 are measurable functions satis-
fying
0 < g0(x) ≤ Cgw2(x) and 0 ≤ g1(x) ≤ Cgw2(x), a.e. x ∈ Γ,
g0 ∈ Lq
q−1 (Γ; w1
1−q
2 );
(G2)
lims→0
g(x, s)g0(x)|s|p−1 = 0, uniformly in x ∈ Γ;
(G3) lim sups→+∞
1g0(x)|sp|G(x, s) < +∞ uniformly for all x ∈ Γ, max
|s|≤MG(·, s) ∈
L1(Γ) for all M > 0, where G is the primitive function of g with
respect to the second variable, i.e. G(x, u) =∫ u
0
g(x, s)ds.
The functions w1 and w2 are defined as in the previous section, that is,
wi = (1 + |x|)αi , i = 1, 2.
The first multiplicity result for problem (P ′′λ,µ) is the following:
Theorem 3.5 Let f : Ω×R→ R be a function satisfying the conditions(F1)-(F4). Then, there exists a non-degenerate compact interval [a, b] ⊂]0, +∞[ with the following properties:
1 there exists a number σ0 > 0 such that for every λ ∈ [a, b] and forevery function g : Γ×R→ R satisfying the conditions (G1)-(G2),there exists µ0 > 0 such that for each µ ∈]0, µ0[, the functionalEλ,µ has at least two critical points with norms less than σ0;
2 there exists a number σ1 > 0 such that for every λ ∈ [a, b] and forevery function g : Γ×R→ R satisfying the conditions (G1)-(G3),there exists µ1 > 0 such that for each µ ∈]0, µ1[, the functionalEλ,µ has at least three critical points with norms less than σ1.
To prove Theorem 3.5 we use Theorem 1.15. Before we prove thisresult, we need some auxiliary results.

110 Nonlinear Eigenvalue Problems
Lemma 3.5 We assume that the conditions (F1) and (F2) are satisfied.Then, the functional JF is sequentially weakly continuous.
Proof First we observe that, from assumption (F1) and (F2), for everyε > 0, there exists Cε such that
|F (x, u)| ≤ εf0(x)|u(x)|p + Cε(f0(x) + f1(x))|u(x)|r. (3.45)
Now we prove our assertion, arguing by contradiction: Let un be asequence in E weakly convergent to u ∈ E, and let d > 0 be such that
|JF (un)− JF (u)| ≥ d for all n ∈ N.
Without loss of generality, we can assume that there is a positiveconstant M such that
‖u‖b ≤ M, ‖un‖b ≤ M, ‖un − u‖b ≤ M, for all n ∈ N.
Because the embedding E → Lr(Ω;w1) is compact, follows ‖un−u‖r,w1 →0. Using (3.45), Theorem 3.1 and the Holder inequality we have
|JF (un)− JF (u)| ≤∫
Ω
|F (x, un(x))− F (x, u(x))|dx
≤ εc
∫
Ω
f0(x)|un(x)− u(x)|(|un(x)|p−1 + |u(x)|p−1)dx
+cCε
∫
Ω
(f0(x) + f1(x))|un(x)− u(x)|(|un(x)|r−1 + |u(x)|r−1)dx
≤ εcCf
∫
Ω
w1(x)|un(x)− u(x)|(|un(x)|p−1 + |u(x)|p−1)dx
+2cCεCf
∫
Ω
w1(x)|un(x)− u(x)|(|un(x)|r−1 + |u(x)|r−1)dx
≤ εcCf‖un − u‖p,w1(‖un‖pp′p,w1 + ‖u‖
pp′p,w1)
+2cCεCf‖un − u‖r,w1(‖un‖rr′r,w1 + ‖u‖
rr′r,w1),
where c > 0 is a constant, 1p + 1
p′= 1 and 1
r + 1r′
= 1. By the embedding
results from Theorem 3.1 it follows that
d ≤ |JF (un)−JF (u)| ≤ 2εcCfCpp,w1
Mp +4cCεCfCrr′r,w1M
rr′ ‖un−u‖r,w1 .
Therefore, if ε > 0 is sufficiently small and n ∈ N is large enough, wehave
d ≤ |JF (un)− JF (u)| < d,

3.4 Sublinear case 111
which is a contradiction.
Remark 3.1 Note that a similar result holds for the functional JG,i.e. if the conditions (G1), (G2) are fulfilled, then the functional JG issequentially weakly continuous.
Lemma 3.6 There exists u0 ∈ E such that JF (u0) > 0.
Proof Let R0 > 0 and s0 ∈ R from (F4) and fix ε ∈ (0, R02 ). We consider
the function uε ∈ C∞0 (Ω) such that
uε(x) =
0, if |x− x0| ≥ R0
s0, if |x− x0| ≤ R0 − ε
and ‖uε‖∞ ≤ |s0|. Then, we have uε ∈ E.We denote by V ol(Br(x0)) the volume of the ball
Br(x0) = x ∈ RN : |x− x0| ≤ r.We have
JF (uε) =∫
Ω
F (x, uε)dx =∫
BR0−ε(x0)∩Ω
F (x, uε(x))dx +
+∫
(RN\BR0 (x0))∩Ω
F (x, uε(x))dx +∫
(BR0 (x0)\BR0−ε(x0))∩Ω
F (x, uε(x))dx ≥
≥ A0V ol(BR02
(x0) ∩ Ω)−B0[V ol(BR0(x0) ∩ Ω)− V ol(BR0−ε(x0) ∩ Ω)],
where A0 = min|x−x0|≤R0
F (x, s0) > 0 and B0 = maxR02 ≤|x−x0|≤R0
max|s|≤|s0|
F (x, s).
If ε goes to 0, then [V ol(BR0(x0)∩Ω)−V ol(BR0−ε(x0)∩Ω)] → 0 as well,so we can choose an ε = ε0, such that JF (uε0) > 0. We take u0 = uε0
and the proof is complete.
Lemma 3.7 Suppose that the conditions (F1) and (F3) are satisfied.Then, for every λ ≥ 0 the functional
u → ‖u‖pb
p− λJF (u)
is coercive on E.
Proof If λ = 0, then statement is trivial. Let λ > 0 and a ∈]0, 1
λpCpp,w1
[.

112 Nonlinear Eigenvalue Problems
There exists a positive function ka ∈ L1(Ω; w1) such that
F (x, s) ≤ af0(x)|s|p + ka(x)w1(x), for all (x, s) ∈ Ω× R.
Then, it follows that
‖u‖pb
p− λJF (u) ≥ ‖u‖p
b
p− λa
∫
Ω
w1(x)|u(x)|pdx− λ
∫
Ω
ka(x)w1(x)dx ≥
≥ ‖u‖pb
(1p− λaCp
p,w1
)− λ‖ka‖1,w1 ,
which converges to ∞ as ‖u‖b →∞.
Proof of Theorem 3.5: We define the function h :]0,+∞[→ R by
h(t) = sup
JF (u) :‖u‖p
b
p≤ t
, for all t > 0.
By using (3.45) it follows that
0 ≤ h(t) ≤ εpCfCpp,w1
t + 2prp CεCfCr
r,w1t
rp for all t > 0;
since p < r, this implies
limt→0+
h(t)t
= 0.
By (F4) it is clear that u0 6= 0 (since JF (0) = 0). Therefore, due to theconvergence relation above and Lemma 3.6 it is possible to choose a real
number t0 such that 0 < t0 <‖u0‖p
b
pand
h(t0)t0
<
[‖u0‖pb
p
]−1
· JF (u0).
We choose ρ0 > 0 such that
h(t0) < ρ0 <
[‖u0‖pb
p
]−1
· JF (u0)t0. (3.46)
In particular, we get ρ0 < JF (u0).
Now, we are going to apply Theorem 1.15 to the space E, the intervalΛ =]0, +∞[ and the function Ψ : E × Λ → R defined by
Ψ(u, λ) =‖u‖p
b
p+ λ (ρ0 − JF (u)) for all (u, λ) ∈ E × Λ
and Φ : E → R by
Φ(u) = −JG(u) for all u ∈ E.

3.4 Sublinear case 113
Let us fix λ ∈]0,+∞[: from Lemma 3.7 it follows that the functional
Ψ(·, λ) is coercive; moreover, Ψ(·, λ) is the sum of u 7→ ‖u‖pb
p, which is se-
quentially weakly l.s.c., and of u 7→ λ (ρ0 − JF (u)), which is sequentiallyweakly continuous (see Lemma 3.5).
We prove now that Ψ complies with the minimax inequality (1.20)from Theorem 1.15. The function
λ 7→ infu∈E
Ψ(u, λ)
is upper semicontinuous on Λ. Since
infu∈E
Ψ(u, λ) ≤ Ψ(u0, λ) =‖u0‖p
b
p+ λ(ρ0 − JF (u0))
and ρ0 < JF (u0), it follows that
limλ→+∞
infu∈E
Ψ(u, λ) = −∞.
Thus we can find λ ∈ Λ such that
β1 = supλ∈Λ
infu∈E
Ψ(u, λ) = infu∈E
Ψ(u, λ).
In order to prove that β1 < t0, we distinguish two cases:I. If 0 ≤ λ < t0
ρ0, we have
β1 ≤ Ψ(0, λ) = λρ0 < t0.
II. If λ ≥ t0ρ0
, then we use ρ0 < JF (u0) and the inequality (3.46) to get
β1 ≤ Ψ(u0, λ) ≤ ‖u0‖pb
p+
t0ρ0
(ρ0 − JF (u0)) < t0.
Let us focus next on the right hand side of the inequality (1.20) ofTheorem 1.15. Clearly,
β2 = infu∈E
supλ∈Λ
Ψ(u, λ) = inf‖u‖p
b
p: JF (u) ≥ ρ0
.
On the other hand, by applying again (3.46) we easily get
t0 ≤ inf‖u‖p
b
p: JF (u) ≥ ρ0
.
We conclude that
β1 < t0 ≤ β2,

114 Nonlinear Eigenvalue Problems
i.e., condition (1.20) from Theorem 1.15 holds .
Thus, we can apply Theorem 1.15. Fix δ > β1, and for every λ ∈ Λdenote
Sλ = u ∈ E : Ψ(u, λ) < δ .
There exists a non-empty open set Λ0 ⊂]0, +∞[ with the following prop-erty: for every λ ∈ Λ0 and every sequentially weakly l.s.c. Φ : E → R,there exists µ0 > 0, such that for each µ ∈]0, µ0[, the functional
u → Ψ(u, λ) + µΦ(u)
has at least two local minima lying in the set Sλ. Let [a, b] ⊂ Λ0 be anon–degenerate compact interval.
We prove now the two assertions of our theorem:1 Let λ ∈ [a, b] be a real number, and let g : Γ × R → R satisfyingthe conditions (G1)-(G2), and let Φ = −JG. Then, by Remark 3.1, Φis sequentially weakly continuous. From what stated above, there existsµ0 > 0 such that for all µ ∈]0, µ0[ the functional Eλ,µ admits at leasttwo local minima u1
λ,µ, u2λ,µ ∈ Sλ, therefore these are critical points of
Eλ,µ.Observe that
S :=⋃
λ∈[a,b]
Sλ ⊆ Sa ∪ Sb.
Since Ψ(·, λ) is coercive for all λ ≥ 0, the latter sets are bounded, henceS is bounded as well. Chosen σ0 > sup
u∈S‖u‖b, we get
‖u1λ,µ‖b, ‖u2
λ,µ‖b < σ0.
2 Let λ ∈ [a, b] be a real number, and let g : Γ × R → R satisfyingthe conditions (G1)-(G3): as above, there exists µ0 > 0 such that for allµ ∈]0, µ0[ the functional Eλ,µ has at least two local minima u1
λ,µ, u2λ,µ ∈
E with norms less than σ0. To prove the existence of a third criticalpoint for Eλ,µ, we are going to apply Theorem 1.8. For this, it is enoughto prove that the functional Eλ,µ satisfies the (PS) condition for µ > 0small enough. Since (G3) holds, arguing as in Lemma 3.7, it is easy toprove that there exists µ1 ∈]0, µ0[ such that Eλ,µ is coercive in E for allµ ∈ [0, µ1]. Let un be a sequence such that Eλ,µ(un) is bounded andE ′λ,µ(un) → 0 holds. The coercivity of Eλ,µ implies that un is boundedE. Because E is a reflexive Banach space we can find a subsequence,

3.4 Sublinear case 115
which we still denote by un, weakly convergent to a point u? ∈ E.We denote I(u) = 1
p‖u‖pb . Then the directional derivative of Eλ,µ in the
direction h ∈ E is
〈E ′λ,µ(u), h〉 = 〈I ′(u), h〉 − λ〈J ′F (u), h〉 − µ〈J ′G(u), h〉,where
〈I ′(u), h〉 =∫
Ω
a(x)|∇u|p−2∇u(x)∇h(x)dx+∫
Γ
b(x)|u(x)|p−2u(x)h(x)dΓ,
〈J ′F (u), h〉 =∫
Ω
f(x, u(x))h(x)dx and 〈J ′G(u), h〉 =∫
Γ
g(x, u(x))h(x)dΓ.
To show that un → u? strongly in E we use the inequalities (3.17) and(3.18).
In the case p ≥ 2 we use (3.17) and we obtain:
‖un − u?‖pb =
∫
Ω
a(x)|∇un(x)−∇u?(x)|pdx +∫
Γ
b(x)|un(x)− u?(x)|pdΓ
≤ C(〈I ′(un), un − u?〉 − 〈I ′(u?), un − u?〉
)
= C(〈E ′λ,µ(un), un − u?〉 − 〈E ′λ,µ(u?), un − u?〉+ 〈λJ ′F (un)
+µJ ′G(un), un − u?〉 − 〈λJ ′F (u?) + µJ ′G(u?), un − u?〉)
≤ C(‖E ′λ,µ(un)‖E′ + λ‖J ′F (un)− J ′F (u?)‖E′
+µ‖J ′G(un)− J ′G(u?)‖E′)‖un − u?‖b − C〈E ′λ,µ(u?), un − u?〉 .
Since E ′λ,µ(un) → 0 and J ′F , J ′G are compact, it follows that un → u?
converges strongly in E.In the case 1 < p < 2, we use (3.18) and Holder’s inequality to obtainthe estimate
‖un−u?‖pb ≤ C
∣∣∣〈I ′(un), un−u?〉−〈I ′(u?), un−u?〉∣∣∣(‖un‖p
b+‖u?‖pb
)(2−p)/p
,
where C > 0 is a positive constant depending on p and C.Thus, the condition (PS) is fulfilled for all µ ∈ [0, µ1]. This concludes
our proof.
Corollary 3.1 Let f : Ω × R → R be a function satisfying conditions(F1)-(F4). Then, there exists a non-degenerate compact interval [a, b] ⊂]0, +∞[ with the following properties:

116 Nonlinear Eigenvalue Problems
I. there exists a number σ0 > 0 such that for every λ ∈ [a, b] andfor every function g : Γ×R→ R satisfying conditions (G1)-(G2),there exists µ0 > 0 such that for each µ ∈]0, µ0[, problem (P ′′λ,µ)has at least one non–trivial solution in E with norm less than σ0;
II. for every λ ∈ [a, b] and for every function g : Γ×R→ R satisfyingconditions (G1)-(G3), there exists µ1 > 0 such that for each µ ∈]0, µ1[, problem (P ′′λ,µ) has at least two non–trivial solutions in E.
In the last part of this section we consider for λ > 0 and µ ∈ R thefollowing double eigenvalue problem:
(P ′′′λ,µ)
−div(a(x)|∇u|p−2∇u) = λf(x, u) in Ω,
a(x)|∇u|p−2∇u · n + b(x)|u|p−2u = λµg(x, u) on Γ
u 6= 0 in Ω,
where we use the same notations as in the case of problem (P ′′λ,µ).
The energy functional Fλ,µ : E → R corresponding to (P ′′′λ,µ) is givenby:
Fλ,µ(u) =1p
∫
Ω
a(x)|∇u(x)|pdx +1p
∫
Γ
b(x)|u(x)|pdΓ− λJµ(u),
where Jµ(u) = JF (u) + µJG(u).
Lemma 3.8 Suppose that the conditions (F1), (F3), (G1) and (G3) aresatisfied. Then, for every λ ≥ 0 and µ ∈ R the functional Fλ,µ is coerciveon E and satisfies the (PS) condition.
Proof If λ = 0, then the statement is trivial.
Let λ > 0, µ ∈ R and a, b > 0 such that λaCfCpp,w1
+ λ|µ|bCgCpp,w2
<1p. There exist positive functions ka ∈ L1(Ω; w1), kb ∈ L1(Γ; w2) such
that
F (x, s) ≤ af0(x)|s|p + ka(x)w1(x), for all (x, s) ∈ Ω× R,
G(x, s) ≤ bg0(x)|s|p + kb(x)w2(x), for all (x, s) ∈ Γ× R.

3.4 Sublinear case 117
Then, it follows that
Fλ,µ(u) =‖u‖p
b
p− λJµ(u) =
‖u‖pb
p− λ
( ∫
Ω
F (x, u(x))dx + µ
∫
Γ
G(x, u(x))dΓ)≥
≥ ‖u‖pb
p− λaCf
∫
Ω
w1(x)|u(x)|pdx− λ
∫
Ω
ka(x)w1(x)dx−
− λ|µ|bCg
∫
Γ
w2(x)|u(x)|pdΓ− λ|µ|∫
Γ
kb(x)w2(x)dΓ ≥
≥ ‖u‖pb
(1p− λaCfCp
p,w1− λ|µ|bCgC
pp,w2
)− λ‖ka‖1,w1 − λ|µ|‖kb‖1,w2
which goes to ∞ as ‖u‖b →∞. We omit to prove that Fλ,µ satisfies the(PS) condition, since it is likewise to the proof given in Lemma 3.4.
Theorem 3.6 We suppose that the functions f : Ω × R → R andg : Γ × R → R satisfy the conditions (F1) − (F4) and (G1) − (G3)respectively. Then, there exists λ0 > 0 such that to every λ ∈]λ0,+∞[ itcorresponds a nonempty open interval Iλ ⊂ R such that for every µ ∈ Iλ
problem (P ′′′λ,µ) has at least two distinct, nontrivial weak solutions uλ,µ
and vλ,µ, with the property
Fλ,µ(uλ, µ) < 0 < Fλ,µ(vλ, µ).
Lemma 3.9 For λ > λ0 and |µ| ∈]0, µ∗λ] we have
infu∈E
Fλ,µ(u) < 0.
Proof. It is sufficient to prove, that for λ > λ0 and |µ| ∈]0, µ∗λ] we haveFλ,µ(u0) < 0. Indeed,
Fλ,µ(u0) = I(u)− λJf (u0)− λµJG(u0) ≤≤ λ0JF (u0)− λJF (u0) + λ|µ|m =
= (λ0 − λ)JF (u0) + λ|µ|m =
= (λ0 − λ)λ(1 + c)µ∗λ
λ− λ0+ λ|µ|m =
= −(1 + m)λµ∗λ + λ|µ|m =
= −λµ∗λ −mλ(|µ| − µ∗λ) < 0
for all λ > λ0 and |µ| ∈]0, µ∗λ]. ¤
Lemma 3.10 For every λ > λ0 and µ ∈]0, µ∗λ], the functional Fλ,µ
satisfies the mountain pass geometry.

118 Nonlinear Eigenvalue Problems
Proof. The assumptions (F1),(F2), (G1) and (G2) imply for everyε > 0 the existence of c1(ε), c2(ε) > 0 such that
|F (x, u(x))| ≤ εf0(x)|u(x)|p + c1(ε)(f0(x) + f1(x))|u(x)|r, (3.47)
|G(x, u(x))| ≤ εg0(x)|u(x)|p + c2(ε)(g0(x) + g1(x))|u(x)|m, (3.48)
where r ∈]p, p∗[ and m ∈[p, pN−1
N−p
]. Using again (F1) and (G1), we get
|F (x, u(x))| ≤ εw1(x)Cf |u(x)|p + 2c1(ε)Cfw1(x))|u(x)|r, (3.49)
|G(x, u(x))| ≤ εw2(x)Cg|u(x)|p + 2c2(ε)Cgw2(x)|u(x)|m. (3.50)
Fix λ > λ0 and µ ∈]0, µ∗λ[, then by using the inequalities from (3.49)and (3.50) we have for every u ∈ E
Fλ,µ(u) =1p‖u‖p
b − λJµ(u) ≥
≥ 1p‖u‖p
b − λ
∫
Ω
|F (x, u(x))|dx− λ|µ|∫
Γ
|G(x, u(x))|dΓ ≥
≥ 1p‖u‖p
b − λεCf
∫
Ω
w1(x)|u(x)|pdx− 2λc1(ε)Cf
∫
Ω
w1(x)|u(x)|rdx
−λ|µ|εCg
∫
Γ
w2(x)|u(x)|pdΓ− 2λ|µ|c2(ε)Cg
∫
Γ
w2(x)|u(x)|mdΓ =
=1p‖u‖p
b − λεCf‖u‖pp,w1
− 2λc1(ε)Cf‖u‖rr,w1
−−λ|µ|εCg‖u‖p
p,w2− 2λ|µ|c2(ε)Cg‖u‖m
m,w2≥
≥(
1p− λεCfCp
p,w1− λ|µ|εCgC
pp,w2
)‖u‖p
b −− 2λc1(ε)CfCr
r,w1‖u‖r
b − 2λ|µ|c2(ε)CgCmm,w2
‖u‖mb .
Using the notations
A =(
1p− λεCfCp
p,w1− λ|µ|εCgC
pp,w2
),
B = 2λc1(ε)CfCrr,w1
, C = 2λ|µ|c2(ε)CgCmm,w2
,
we get
Fλ,µ(u) ≥ (A−B‖u‖r−pb − C‖u‖m−p
b )‖u‖pb .
We choose ε ∈]0, 1
2p1
λ(Cf Cpp,w1+|µ|CgCp
p,w2 )
[, then A > 0. Let l :
R+ → R be defined by l(t) = A − Btr−p − Ctm−p. We can see, thatl(0) = A > 0, so there exists ε∗ > 0 such that l(t) > 0 for every t ∈

3.5 Comments and further perspectives 119
]0, ε∗[. Then, for every u ∈ E, with ‖u‖ = ε∗∗ < minε∗, ‖u0‖, we haveFλ,µ(u) ≥ η(λ, µ, ε∗) > 0. From Lemma 3.9 we obtain Fλ,µ(u0) < 0.
Therefore, the functional Fλ,µ satisfies the hypotheses of Theorem 1.7.¤
Proof of Theorem 3.6: Fix λ > λ0 and µ ∈]0, µ∗λ[= Iλ. FromLemma 3.8 we have that the functional Fλ,µ is coercive and satisfiesthe (PS) condition. Then, there exists an element uλ,µ ∈ E such thatEλ,µ(uλ,µ) = inf
v∈EFλ,µ(v) (see [249]). By using Lemma 3.9 we obtain
Fλ,µ(uλ,µ) < 0. On the other hand, by Lemma 3.10 and Theorem 1.8,it follows that there exists an element vλ,µ ∈ E such that F ′λ,µ(vλ,µ) = 0and Fλ,µ(vλ,µ) ≥ η(λ, µ, ε∗) > 0. ¤
3.5 Comments and further perspectives
A. Comments. The problems considered in this chapter extend in aquasilinear framework the stationary Schrodinger equation
−∆u + V (x)u = au in Ω .
This equation describes the motion of a particle interacting with a forcefield F (x) = −∇V (x), where the function V : Ω→R is called a potential.The associated energy functional is
E(u) = E1(u) + E2(u) ,
where
E1(u) =12
∫
Ω
|∇u|2 dx and E2(u) =12
∫
Ω
[V (x)u2 − au2
]dx .
Physically, E1(u) is called the kinetic energy of the particle u, E2(u) isits potential energy, while E(u) is the total energy of u.
In some situations (see, e.g., Proposition 3.1), the kinetic energy dom-inates the potential energy. Any inequality in which the kinetic energydominates some kind of integral of u (but not depending on ∇u) is calledan uncertainty principle. As stated in [189], “the historical reason forthis strange appellation is that such an inequality implies that one can-not make the potential energy very negative without also making thekinetic energy large”.
In this chapter we have been interested in the qualitative analysis of

120 Nonlinear Eigenvalue Problems
weak solutions to the quasilinear mixed boundary value problem
(Pλ,µ) −div (a(x)|∇u|p−2∇u) = λα(x, u) + β(x, u) in Ω,
a(x)|∇u|p−2∇u · n + b(x)|u|p−2u = µh(x, u) on Γ ,
where Ω ⊂ RN is an unbounded domain with (possible noncompact)smooth boundary Γ. In our treatment a central role is played by thecompact embedding result Theorem 3.1, due to Pfluger [237], [238]. Inour results, the functions α, β and h satisfies subcritical growth condi-tion, which implies that the energy functional associated to the problem(Pλ,µ) satisfies the (PS) condition. The (PS) condition play a key placein the mountain pass theorem and Ricceri type results used in the proofof our results. The results of this chapter are based on the papers Mon-tefusco and Radulescu [218], Carstea and Radulescu [70], Lisei, Varga,and Horvath [192], and Mezei and Varga [210].
B. Further perspectives. In the last years the fibering method intro-duced and developed by Pohozaev [241], [242], [243] can be applied withsuccess in the study of existence and multiplicity of solutions for bi-furcation equations, homogenous Dirichlet or Neumann problems whichcontain p-Laplacian (see [244]). El Hamidi in the paper [102] use thismethod to study mixed homogeneous problems. Mitidieri and Bozhkovin [212] use an early modified version of fibering method and prove theexistence and multiplicity results for quasilinear system, which containsp, q-Laplacians. In [142] the authors study positive solutions for indefi-nite inhomogeneous Neumann elliptic problems using this methods. Us-ing the concentration compactness principle [191] combined with fiberingmethod we propose the following problem:
(P ?λ,µ)
−div (a(x)|∇u|p−2∇u) = λK(x)|u|r + k(x)|u|p−2u in Ω,
a(x)|∇u|p−2∇u · n + b(x)|u|p−2u = µL(x)|u|q on Γ ,,
where r = p? = pNN−p , q < p? = p(N−1)
N−p or r < p? = pNN−p , q =
p? = p(N−1)N−p or r = p? = pN
N−p , q = p? = p(N−1)N−p or p? = pN
N−p , p? =p(N−1)
N−p represent the critical Sobolev exponent for the embedding E →Lr(Ω;w1) and E → Lq(Γ; w2).
The problem (P ?λ,µ) is similar with Yamabe problem on manifold with
boundary, see the papers of Escobar [104], [105] and [106].

4
Elliptic Systems of Gradient Type
Rigor is to the mathematicianwhat morality is to men.
Andre Weil (1906–1998)
4.1 Introduction
In this chapter we are concerned to study the existence and multiplicityresults for eigenvalue problems for elliptic systems of gradient type. Onof the main results mathematical development was initiated by Esteban[107], Grossinho and Tersian [132], Fan and Zhao [110]. In this chapterwe present some new results in this direction using results of Bartolo,Benci and Fortunato [24], and some recent results of Ricceri [255], [259],[257], [261] and Tsar’kov [285].
4.2 Formulation of the problems
Let Ω ⊆ RN a stripe-like domain, i.e. Ω = ω × Rl, ω ⊂ Rm is boundedwith smooth boundary and m ≥ 1, l ≥ 2, 1 < p, q < N = m + l. LetF : Ω × R2 → R be a function of class C1. We consider the followingproblem:
(Sλp,q)
−4pu = λFu(x, u, v) in Ω,
−4qv = λFv(x, u, v) in Ω,
u = v = 0 on ∂Ω,
We suppose that the function F : Ω × R2 → R satisfies the followingcondition:
121

122 Elliptic Systems of Gradient Type
(F1) F : Ω×R2 → R is continuous, (s, t) 7→ F (x, s, t) is of class C1 andF (x, 0, 0) = 0 for every x ∈ Ω.
(F2) There exist c1 > 0 and r ∈ (p, p∗), s ∈ (q, q∗) such that
|Fu(x, u, v)| ≤ c1(|u|p−1 + |v|(p−1)q/p + |u|r−1), (4.1)
|Fv(x, u, v)| ≤ c1(|v|q−1 + |u|(q−1)p/q + |v|s−1) (4.2)
for every x ∈ Ω and (u, v) ∈ R2.
We consider the Sobolev space W 1,α0 (Ω)(α ∈ p, q) endowed with the
norm
‖u‖1,α = (∫
Ω
|∇u|α)1/α,
with α ∈ p, q.We say that (u, v) ∈ W 1,p
0 ×W 1,q0 is a weak solutions of the problem
(Sp,q,Ω) if
∫
Ω
|∇u|p−2∇u∇w1dx− λ
∫
Ω
F ′u(x; u(x), v(x))w1(x))dx = 0
∫
Ω
|∇v|q−2∇v∇w2dx− λ
∫
Ω
F ′v(x; u(x), v(x))w2(x)dx = 0,
for every (w1, w2) ∈ W 1,p0 ×W 1,q
0 .The product space W 1,p
0 (Ω) × W 1,q0 (Ω) is endowed with the norm
‖(u, v)‖1,p,q = ‖u‖1,p + ‖v‖1,q. We define the function F : W 1,p0 (Ω) ×
W 1,q0 (Ω) → R by
F(u, v) =∫
Ω
F (x;u, v)dx
for u ∈ W 1,p0 (Ω), v ∈ W 1,q
0 (Ω). The energy functional associated toproblem (Sλ
p,q) is given by
E(u, v) =1p||u||p1,p +
1q||v||q1,q −
∫
Ω
F (x; u, v)dx
and taking into account the conditions (F1) and (F2) follows that E
is of class C1 and its critical points are weak solutions of the problem(Sλ
p,q).The embedding W 1,α
0 (Ω) → Lβ(Ω) for β ∈ [α, α∗] (α ∈ p, q) arecontinuous, and we denote by cβ,α > 0 be the embedding constant, i.e.‖u‖β ≤ cβ,α‖u‖1,α for all u ∈ W 1,α
0 (Ω). Since the embedding W 1,α0 (Ω) →

4.2 Formulation of the problems 123
Lβ(Ω) for β ∈ [α, α∗] (α ∈ p, q) are not compact, we introduce theaction of G = idm ×O(N −m) on W 1,α
0 (Ω) as
gu(x, y) = u(x, g−10 y)
for all (x, y) ∈ ω × RN−m, g = idm × g0 ∈ G and u ∈ W 1,α0 (Ω), α ∈
p, q. Moreover, the action G on W 1,α0 (Ω) is isometric, that is ‖gu‖1,α =
‖u‖1,α for all g ∈ G, u ∈ W 1,α0 (Ω), α ∈ p, q. Let us denote by
W 1,α0,G(Ω) = u ∈ W 1,α
0 (Ω) : gu = u for all g ∈ G, α ∈ p, q,which is exactly the closed subspace of axially symmetric functions ofW 1,α
0 (Ω). The embeddings W 1,α0,G(Ω) → Lβ(Ω), α < β < α∗, α ∈ p, q,
are compact see Appendix Sobolev space. The fixed points set of theaction G on W 1,p
0 (Ω)×W 1,q0 (Ω) is W 1,p,q
0,G (Ω) = W 1,p0,G(Ω)×W 1,q
0,G(Ω). Tobe possible to use the Principle of symmetric criticality, i.e. Theorem... , we introduce an invariance condition for the function F , i.e. wesuppose that:
(FI) F (gx, u, v) = F (x, u, v) for every x ∈ Ω, g ∈ G and (u, v) ∈ R2.
Therefore to study the weak solutions of the problem (Sλp,q) it is suf-
ficient to study the existence of critical points of the function EG =E|W 1,p,q
0,G (Ω). To manipulate easier the problem (Sλp,q) we introduce the
following notations:
〈Apu,w1〉p =∫
Ω
|∇u|p−2∇u∇w1dx
and
〈Aqv, w2〉q =∫
Ω
|∇v|p−2∇v∇w1dx,
where 〈·, ·〉p ( 〈·, ·〉q) means the duality between W 1,p0 (Ω) and (W 1,p
0 (Ω))?
(W 1,q0 (Ω) and (W 1,q
0 (Ω))?) respectively. Also we denote in the same waythe restriction of the norms ‖ · ‖1,p, ‖ · ‖1,q and 〈·, ·〉p, 〈·, ·〉q restricted toW 1,p,q
0,G (Ω).
With the above notations we have Ap : W 1,p0 (Ω) → (W 1,p
0 (Ω))? andAq : W 1,q
0 (Ω) → (W 1,q0 (Ω))? are the duality mappings induced by the
the functions t ∈ [0,+∞[ 7→ tp−1 ∈ [0, +∞[, and t ∈ [0,+∞[ 7→ tq−1 ∈[0, +∞[, respectively.
This chapter is divided in three sections. In the first section we studythe case when the function F is superlinear at infinity, the second section

124 Elliptic Systems of Gradient Type
contain the case when F is sublinear, while the section three contains aspecial class of system.
4.3 Systems with superlinear potential
In this section we prove an existence result for problem ((Sλp,q) in the case
when λ = 1 and the function F is independent of x, i.e. F : R2 → R andsatisfies the conditions (F1), (F2). In this case we have the followingproblem:
(Sp,q)
−4pu = Fu(u, v) in Ω,
−4qv = Fv(u, v) in Ω,
u = v = 0 on ∂Ω,
This problem consists in finding (u, v) ∈ W 1,p0 (Ω)×W 1,p
0 (Ω) such that
〈Ap(u), w1〉 −∫
Ω
F ′u(u(x), v(x))w1(x))dx = 0
〈Aq(v), w2〉 −∫
Ω
F ′v(u(x), v(x))w2(x)dx = 0,
for every (w1, w2) ∈ W 1,p0 (Ω)×W 1,q
0 (Ω).In this case the energy functional associated to the problem (Sp,q) is
given by
E(u, v) =1p||u||p1,p +
1q||v||q1,q −F(u, v), (4.3)
where F(u, v) =∫
Ω
F (u(x), v(x))dx. Its derivative in (u, v) ∈ W 1,p0 (Ω)×
W 1,q0 (Ω) is given by
E′(u, v)(w1, w2) = 〈Ap(u), w1〉p+〈Aq(u), w2〉q−F ′(u, v)(w1, w2), (4.4)
for every (w1, w2) ∈ W 1,p0 (Ω)×W 1,q
0 (Ω), where
F ′(u, v)(w1, w2) =∫
Ω
[Fu(u, v)w1 + Fv(u, v)w2]dx. (4.5)
As in introduction we denote by EG = E|W 1,p,q0,G (Ω) and FG = F|W 1,p,q
0,G (Ω).In the following we study the only the existence of critical points of thefunctional EG.
In the next we suppose that the function F : R2 → R beside of

4.3 Systems with superlinear potential 125
conditions (F1), (F2) satisfies the following assumptions:(F3) there exist c2 > 0 and µ, ν ≥ 1 such that
−c2(|u|µ + |v|ν) ≥ F (u, v)− 1pF ′u(u, v)u− 1
qF ′v(u, v)v, (4.6)
for all (u, v) ∈ R2.
(F4) limu,v→0
F ′u(u, v)|u|p−1
= limu,v→0
F ′v(u, v)|v|q−1
= 0,
The main result of this section can be formulated as follows:
Theorem 4.1 We suppose that the function F : Ω × R2 → R satisfiesthe conditions (F1)-(F4) with ps = qr and
µ > max p,N(r − p)/p and ν > max q,N(s− q)/q . (4.7)
Then, (S) admits at least one nonzero solution.
We will use the following inequality:
Proposition 4.1 For all t > 1 and (u, v) ∈ R2 we have
F (t1p u, t
1q v) ≥ tF (u, v) + c2
[p
µ− p(t
µp − t)|u|µ +
q
ν − q(t
νq − t)|v|ν
].
(4.8)
Proof We fix an element (u, v) ∈ R2 arbitrary. We define the functiong :]0,∞[→ R by
g(t) = t−1F (t1p u, t
1q v)− c2
p
µ− pt
µp−1|u|µ − c2
q
ν − qt
νq−1|v|ν .
Since g is of class C1, due to the Mean Value Theorem, for a fixed t > 1there exists τ = τ(t, u, v) ∈]1, t[ such that
g(t)− g(1) = g′(τ)(t− 1).
We have
∂tF (t1p u, t
1q v) =
1pF ′u(t
1p u, t
1q v)t
1p−1u +
1qF ′v(t
1p u, t
1q v)t
1q−1v.
Hence,
g′(t) = −t−2F (t1p u, t
1q v) + t−1
[1pF ′u(t
1p u, t
1q v)t
1p−1u
+1qF ′v(t
1p u, t
1q v)t
1q−1v
]− c2
[t
µp−2|u|µ + t
νq−2|v|ν
].

126 Elliptic Systems of Gradient Type
Therefore,
g(t)− g(1) = −τ−2[F (τ1p u, τ
1q v)− 1
pF ′u(τ
1p u, τ
1q v)τ
1p u
− 1qF ′v(τ
1p u, τ
1q v)τ
1q v + c2(|τ
1p u|µ + |τ 1
q v|ν)](t− 1).
Due to (4.6), we have g(t) ≥ g(1). Thus,
F (t1p u, t
1q v) ≥ tF (u, v) + c2
[p
µ− p(t
µp − t)|u|µ +
q
ν − q(t
νq − t)|v|ν
]
for all t > 1 and (u, v) ∈ R2.
Proposition 4.2 If the assumptions of Theorem 4.1 are satisfied, thenthe functional EG satisfies the Cerami (C)c condition for all c > 0.
Proof The norm of the Banach space W 1,p,q0,G (Ω) is ||(u, v)||1,p.q = ||u||1,p+
||v||1,q. We denote the norm on the dual space (W 1,p,q0,G (Ω))? by || · ||?.
Now, let (un, vn) ∈ W 1,p,q0,G (Ω) be such that
EG(un, vn) → c > 0, (4.9)
and
(1 + ||(un, vn)||1,p,q)||E′G(un, vn)||? → 0, (4.10)
as n → +∞. Moreover, we have⟨
E′G(un, vn)(
1pun,
1qvn)
⟩≥ −(1 + ‖(un, vn)‖‖E′
G(un, vn)‖?. (4.11)
Using (4.9), (4.10) and (4.6) one has for n large enough that
c + 1 ≥ EG(un, vn)− E′G(un, vn)(
1pun,
1qvn)
= −FG(un, vn) + F ′G(un, vn)(1pun,
1qvn)
= −∫
Ω
[F (un, vn)− 1pF ′u(un, vn)un
−1qF ′v(un, vn)vn]dx ≥ c2
∫
Ω
[|un|µ + |vn|ν ]dx.
From the previous inequality we obtain that
(un, vn) is bounded in Lµ(Ω)× Lν(Ω). (4.12)

4.3 Systems with superlinear potential 127
By (F4) we have that for all ε > 0 there exists δ(ε) > 0 such that, if|u|p−1 + |v|(p−1)q/p < δ(ε), then
|F ′u(u, v)| < ε(|u|p−1 + |v|(p−1)q/p
).
If |u|p−1 + |v|(p−1)q/p ≥ δ(ε), by using (4.1), we have
|F ′u(u, v)| ≤ c1[(|u|p−1 + |v|(p−1)q/p)r−1p−1 (δ(ε))
p−rp−1 + |u|r−1]
≤ c(ε)(|u|r−1 + |v|(r−1)q/p).
Combining the above relations, we have that for all ε > 0 there existsc1(ε) > 0 such that
|F ′u(u, v)| < ε(|u|p−1 + |v|(p−1)q/p
)+ c1(ε)
(|u|r−1 + |v|(r−1)q/p
)
(4.13)for all (u, v) ∈ R2. A similar calculation shows that for all ε > 0 thereexists c2(ε) > 0 such that
|F ′v(u, v)| < ε(|v|q−1 + |u|(q−1)p/q
)+ c2(ε)
(|v|s−1 + |u|(s−1)p/q
)
(4.14)for all (u, v) ∈ R2.
Using (4.13), (4.14), and keeping in mind that F (0, 0) = 0, for allε > 0 there exists c(ε) = c(c1(ε), c2(ε)) > 0 such that
F (u, v) ≤ ε(|u|p + |v|(p−1)q/p|u|+ |v|q + |u|(q−1)p/q|v|) (4.15)
+ c(ε)(|u|r + |v|(r−1)q/p|u|+ |v|s + |u|(s−1)p/q|v|)for all (u, v) ∈ R2.
After integration we use the relation ps = qr, as well as Young’sinequality and Holder’s inequality to obtain
FG(un, vn) ≤ ε
[(2 +
1p− 1
q)‖un‖p
p + (2 +1q− 1
p)‖vn‖q
q
]
+ c(ε)[(2 +
1r− 1
s)‖un‖r
r + (2 +1s− 1
r)‖vn‖s
s
].
Therefore, one has[1p− ε(2 +
1p− 1
q)cp
p,p
]‖un‖p
1,p +[1q− ε(2 +
1q− 1
p)cq
q,q
]‖vn‖q
1,q ≤
≤ EG(un, vn) + c(ε)[(2 +
1r− 1
s)‖un‖r
r + (2 +1s− 1
r)‖vn‖s
s
].

128 Elliptic Systems of Gradient Type
Choosing
0 < ε <13
min 1
pcpp,p
,1
qcqq,q
, (4.16)
we find c3(ε), c4(ε) > 0 such that
c3(ε)(‖un‖p1,p + ‖vn‖q
1,q) ≤ c + 1 + c4(ε)(‖un‖rr + ‖vn‖s
s) (4.17)
for n large enough. Now, we will examine the behaviour of the sequences‖un‖r
r and ‖vn‖ss, respectively.
To this end, observe that µ ≤ r and ν ≤ s. From relations (4.1), (4.2)and from the fact that for all β ∈]0,∞[ there exists a constant c(β) > 0such that
(x + y)β ≤ c(β)(xβ + yβ), for all x, y ∈ [0,∞[,
we have
|F (u, v)− F (w, y)| ≤ (4.18)
≤ c3[|u− w|(|u|p−1 + |w|p−1 + |v|(p−1)q/p + |y|(p−1)q/p + |u|r−1 + |w|r−1)
+ |v − y|(|v|q−1 + |y|q−1 + |u|(q−1)p/q + |w|(q−1)p/q + |v|s−1 + |y|s−1)],
where c3 = c3(c1, p, q, r, s) > 0.
Keeping in mind the relation ps = qr, taking w = y = 0 and u = ut1p ,
v = vt1q (t > 1) in (4.18), from (4.8) follow the required relations.
We distinguish two cases:I) µ = r : From (4.12) we have that ‖un‖r
r is bounded.II) µ ∈]max p,N(r − p)/p , r[: We have the interpolation inequality
‖u‖r ≤ ‖u‖1−δµ ‖u‖δ
p∗ for all u ∈ Lµ(Ω) ∩ Lp∗(Ω)
with δ = p∗
r · r−µp∗−µ . From (4.12) and the fact that the embedding
W 1,p0,G(Ω) → Lp∗(Ω), is continuous, we have that there exists c5 > 0
such that ‖un‖rr ≤ c5‖un‖δr
1,p, with δr < p.
Taking into consideration the analogous relations for the sequence‖vn‖s
s, we conclude from (4.17) that the sequences ‖un‖1,p and‖vn‖1,q are bounded. Because the embeddings W 1,p
0,G(Ω) → Lr(Ω),W 1,q
0,G(Ω) → Ls(Ω) are compact, therefore up to a subsequence, we have
(un, vn) → (u, v) weakly inW 1,p,q0,G (Ω), (4.19)
un → u strongly in Lr(Ω), (4.20)

4.3 Systems with superlinear potential 129
vn → v strongly in Ls(Ω). (4.21)
Moreover, we have
E′G(un, vn)(u− un, v − vn) = 〈Ap(un), u− un〉p + 〈Aq(vn), v − vn〉q
− F ′G(un, vn)(u− un, v − vn)
and
E′G(u, v)(un − u, vn − v) = 〈Ap(u), un − u〉p + 〈Aq(v), vn − v〉q
− F ′G(u, v)(un − u, vn − v).
By adding the above two relations, we obtain
Jn := 〈Ap(u)−Ap(un), u−un〉p+〈Aq(v)−Aq(vn), v−vn〉q = J1n−J2
n−J3n,
(4.22)where
J1n = F ′G(un, vn)(un − u, vn − v) + F ′G(u, v)(u− un, v − vn),
J2n = E′
G(un, vn)(u− un, v − vn) and J3n = E′
G(u, v)(un − u, vn − v).
In the sequel, we will estimate J in (i ∈ 1, 2, 3). Using (4.13), (4.14)
and ps = qr, one has
J1n =
∫
Ω
[F ′(un(x), vn(x))(un(x)− u(x), vn(x)− v(x))
+F ′(u(x), v(x))(u(x)− un(x), v(x)− vn(x))]dx
≤∫
Ω
[|F ′u(un(x), vn(x))(un(x)− u(x))|+|F ′v(un(x), vn(x))(vn(x)− v(x))|+ |F ′u(u(x), v(x))(u(x)− un(x))|+|F ′v(u(x), v(x))(v(x)− vn(x))|]dx
≤ ε[(‖un‖p−1
p + ‖u‖p−1p + ‖vn‖(p−1)q/p
q + ‖v‖(p−1)q/pq )‖u− un‖p
+(‖vn‖q−1q + ‖v‖q−1
q + ‖un‖(q−1)p/qp + ‖u‖(q−1)p/q
p )‖v − vn‖q
]
+c1(ε)(‖un‖r−1
r + ‖u‖r−1r + ‖vn‖(r−1)s/r
s + ‖v‖(r−1)s/rs
)‖u− un‖r
+c2(ε)(‖vn‖s−1
s + ‖v‖s−1s + ‖un‖(s−1)r/s
r + ‖u‖(s−1)r/sr
)‖v − vn‖s.
The sequences un and vn are bounded in W 1,p0,G(Ω)(→ Lp(Ω) ∩
Lr(Ω)) and W 1,q0,G(Ω)(→ Lq(Ω) ∩ Ls(Ω)), respectively, then by using
the relations (4.20) and (4.21), one has
lim supn→∞
J1n ≤ 0, (4.23)

130 Elliptic Systems of Gradient Type
since ε > 0 was arbitrary chosen.The convergence in (4.10) implies ||E′
G(un, vn)||? → 0, therefore J2n →
0. Taking into account that (un, vn) W 1,p,q0,G (Ω) weakly, it follows that
J3n → 0. Therefore, if n →∞, then
〈Ap(u)−Ap(un), u− un〉p + 〈Aq(v)−Aq(vn), v − vn〉q → 0.
On the other hand, from the inequality
|t−s|α ≤
(|t|α−2t− |s|α−2s)(t− s), if α ≥ 2,
((|t|α−2t− |s|α−2s)(t− s))α2 (|t|α + |s|α)
2−α2 , if 1 < α < 2,
for all t, s ∈ RN , we obtain that
limn→∞
∫
Ω
(|∇un −∇u|p + |∇vn −∇v|q) = 0,
that is, the sequences un and vn are strongly convergent in W 1,p0,G(Ω)
and W 1,q0,G(Ω), respectively.
To prove Theorem 4.1 we use the following formulation of the Moun-tain Pass Theorem, see [24] or [174].
Proof of Theorem 4.1 If we combine the Principle of Symmetriccriticality with Theorem Cerami Mountain Pass the assertion follows.From Proposition 4.2 it follows that the functional EG satisfies the Ce-rami (C)c condition for every c > 0. We need to verify the conditions(i) and (ii) from Theorem Cerami Mountain pass. Using (4.15), weobtain
EG(u, v) =1p‖u‖p
1,p +1q‖v‖q
1,q −∫
Ω
F (u, v)dx ≥[1p− ε(2 +
1p− 1
q)cp
p,p
]‖u‖p
1,p +[1q− ε(2 +
1q− 1
p)cq
q,q
]‖v‖q
1,q
−c(ε)[(2 +
1r− 1
s)‖u‖r
r + (2 +1s− 1
r)‖v‖s
s
].
Choosing ε as in (4.16), we can fix c5(ε), c6(ε) > 0 such that
EG(u, v) ≥ c5(ε)(||u||p1,p + ||v||q1,q)− c6(ε)(||u||r1,p + ||v||s1,q).
Since the function t 7→ (xt + yt)1t , t > 0 is non-increasing (x, y ≥ 0),
using again ps = qr, we have
‖u‖r1,p + ‖v‖s
1,q ≤[‖u‖p
1,p + ‖v‖q1,q
] rp (= s
q ).

4.4 Systems with sublinear potential 131
Therefore,
EG(u, v) ≥[c5(ε)− c6(ε)(‖u‖p
1,p + ‖v‖q1,q)
rp−1
](‖u‖p
1,p + ‖v‖q1,q).
Let 0 < ρ < 1 and denote
Bρ = (u, v) ∈ W 1,p,q0,G (Ω) : ‖(u, v)‖1,p,q = ρ.
Then, we have (ρ/2)maxp,q ≤ ‖u‖p1,p + ‖v‖q
1,q ≤ ρ for all (u, v) ∈ Bρ.
Choosing ρ small enough, there exists η > 0 such that EG(u, v) ≥ η forall (u, v) ∈ Bρ, due to the fact that r > p. This proves (i) from TheoremCerami Mountain Pass.
To prove (ii) from Theorem Cerami Mountain Pass, fix u0 ∈W 1,p
0,G(Ω) and v0 ∈ W 1,q0,G(Ω) such that ‖u0‖1,p = ‖v0‖1,q = 1. Then,
for every t > 1 we have
EG(t1p u0, t
1q v0) = (
1p
+1q)t−
∫
Ω
F (t1p u0, t
1q v0)dx
≤(
1p
+1q−
∫
Ω
F (u0, v0)dx
)t
−c2
[p
µ− p(t
µp − t)‖u0‖µ
µ +q
ν − q(t
νq − t)‖v0‖ν
ν
].
Therefore, EG(t1p u0, t
1q v0) → −∞ as t → ∞ (recall that µ > p and
ν > q). Choosing t = t0 large enough and denoting by ep = t1p
0 u0p and
eq = t1q
0 v0q , we are led to (ii). This completes the proof. ¤
Example 4.1 Let p = 3/2, q = 9/4, Ω =]a, b[×R2 (a < b) and
F (u, v) = u2 + |v|7/2 + 1/4|u|5/2 + |v|5/2.The conditions (F1) an (F4) can be verified easily. Choosing r = 5/2,
s = 15/4 and µ = 5/2, ν = 7/2, the assumptions (F2) and (F3) holdtoo. Therefore we can apply Theorem 4.1 and obtain at least one nonzerosolution for problem (S′3/2,9/4,]a,b[×R2).
4.4 Systems with sublinear potential
In the previous section we studied problem (Sp,q), assuming that thefunction F satisfies the condition (F3), which is an Amrosetti-Rabinowitztype condition and which asserts that the energy functional E satisfiesthe Palais-Smale or Cerami compactness condition. This condition im-plies, in particular, some sort of superlinearity of F . In this section we

132 Elliptic Systems of Gradient Type
will treat the case when F is sub-(p, q)-linear. We suppose that the con-ditions (F1)-(F2) are fulfilled as introduction. Also, we impose that thefunction F : Ω× R2 → R satisfies the following conditions:
(F’3) limu,v→0
Fu(x, u, v)|u|p−1
= limu,v→0
Fv(x, u, v)|v|q−1
= 0 uniformly for every x ∈Ω.
(F’4) There exist p1 ∈ (0, p), q1 ∈ (0, q), µ ∈ [p, p∗], ν ∈ [q, q∗] anda ∈ Lµ/(µ−p1)(Ω), b ∈ Lν/(ν−q1)(Ω), c ∈ L1(Ω) such that
F (x, u, v) ≤ a(x)|u|p1 + b(x)|v|q1 + c(x)
for every x ∈ Ω and (u, v) ∈ R2.
(F’5) There exists (u0, v0) ∈ W p,qG such that
∫
Ω
F (x, u0(x), v0(x))dx > 0.
In this section we suppose that the function F satisfies the conditions(F1)-(F2) and (F’3)-(F’5). This section is dedicated to study the prob-lem (Sλ
p,q) which is equivalent with, find (u, v) ∈ W 1,p0 (Ω)×W 1,q
0 (Ω) suchthat
〈Ap(u), w1〉p − λ
∫
Ω
F ′u(x;u(x), v(x))w1(x))dx = 0
〈Aq(v), w2〉q − λ
∫
Ω
F ′v(x; u(x), v(x))w2(x)dx = 0,
for every (w1, w2) ∈ W 1,p0 (Ω)×W 1,q
0 (Ω), where λ ∈ R is a parameter.Using the Principle of Symmetric Criticality it is enough to study the
critical points of the functional Eλ,G = Eλ|W 1,p,q0,G (Ω). The functional
Eλ,G : W 1,p,q0,G (Ω) → R is given by
Eλ,G(u, v) =1p||u||p1,p +
1q||v||q1,q − λFG(u, v), (4.24)
where FG(u, v) =∫
Ω
F (x; u(x), v(x))dx and its critical points will be
the weak solutions of the problem (Sλp,q).
The main result of this section is the following:

4.4 Systems with sublinear potential 133
Theorem 4.2 Let F : Ω × R2 → R be a function which satisfies theconditions (F1)-(F2) and (F’3)-(F’5) and ps = qr. Then, there existan open interval Λ ⊂ (0,∞) and σ > 0 such that for all λ ∈ Λ thesystem (Sλ) has at least two distinct, nontrivial weak solutions, denotedby (ui
λ, viλ), i ∈ 1, 2 such that ‖ui
λ‖1,p < σ, ‖viλ‖1,q < σ, i ∈ 1, 2.
Further in this section, we suppose that all assumptions of Theorem4.2 are fulfilled. Before we prove Theorem 4.2, the main result of thissection, we need some auxiliary results.
Lemma 4.1 For every ε > 0 there exists c(ε) > 0 such thati) |Fu(x, u, v)| ≤ ε(|u|p−1 + |v|(p−1)q/p) + c(ε)(|u|r−1 + |v|(r−1)q/p);ii) |Fv(x, u, v)| ≤ ε(|v|q−1 + |u|(q−1)p/q) + c(ε)(|v|s−1 + |u|(s−1)p/q);iii) |F (x, u, v)| ≤ ε(|u|p + |v|(p−1)q/p|u|+ |v|q + |u|(q−1)p/q|v|)
+c(ε)(|u|r + |v|(r−1)q/p|u|+ |v|s + |u|(s−1)p/q|v|)for every x ∈ Ω and (u, v) ∈ R2.
Proof i) Let ε > 0 be arbitrary. Let us prove the first inequality,the second one being similar. From the first limit of (F’3) we have inparticular that
limu,v→0
Fu(x, u, v)|u|p−1 + |v|(p−1)q/p
= 0.
Therefore, there exists δ(ε) > 0 such that, if |u|p−1 + |v|(p−1)q/p < δ(ε),then |Fu(x, u, v)| ≤ ε(|u|p−1 + |v|(p−1)q/p). If |u|p−1 + |v|(p−1)q/p ≥ δ(ε),then (4.1) implies that
|Fu(x, u, v)| ≤ c1[(|u|p−1 + |v|(p−1)q/p)(r−1)/(p−1)δ(ε)(p−r)/(p−1) + |u|r−1]
+ c(ε)(|u|r−1 + |v|(r−1)q/p).
Combining the above inequalities, we obtain the desired relation. The in-equality iii) follows from the Mean Value Theorem, i), ii) and F (x, 0, 0) =0.
Lemma 4.2 FG is a sequentially weakly continuous function on W 1,p,q0,G (Ω).
Proof Suppose the contrary, i.e., let (un, vn) ⊂ W 1,p,q0,G (Ω) be a se-
quence which converges weakly to (u, v) ∈ W 1,p,q0,G (Ω) and FG(un, vn) 9
FG(u, v). Therefore, there exists ε0 > 0 and a subsequence of (un, vn)(denoted again by (un, vn)) such that
0 < ε0 ≤ |FG(un, vn)−FG(u, v)| for every n ∈ N.

134 Elliptic Systems of Gradient Type
For some 0 < θn < 1 we have
0 < ε0 ≤ |F ′(un + θn(u− un), vn + θn(v − vn))(un − u, vn − v)| (4.25)
for every n ∈ N. Let us denote by wn = un + θn(u − un) and yn =vn+θn(v−vn). Since the embeddings W 1,p
0,G → Lr(Ω) and W 1,q0,G → Ls(Ω)
are compact, up to a subsequence, (un, vn) converges strongly to (u, v)in Lr(Ω)×Ls(Ω). By (4.5), Lemma 4.1, Holder’s inequality and ps = qr
one has
|F ′(wn, yn)(un − u, vn − v)|≤
∫
Ω
[|Fu(x,wn, yn)||un − u|+ |Fv(x,wn, yn)||vn − v|]dx
≤ ε
∫
Ω
[(|wn|p−1 + |yn|(p−1)q/p)|un − u|+ (|yn|q−1 + |wn|(q−1)p/q)|vn − v|]dx
+c(ε)∫
Ω
[(|wn|r−1 + |yn|(r−1)q/p)|un − u|+ (|yn|s−1
+|wn|(s−1)p/q)|vn − v|]dx
≤ ε[(‖wn‖p−1p + ‖yn‖(p−1)q/p
q )‖un − u‖p + (‖yn‖q−1q +
‖wn‖(q−1)p/qp )‖vn − v‖q] + c(ε)[(‖wn‖r−1
r + ‖yn‖(r−1)q/ps )‖un − u‖r
+(‖yn‖s−1s + ‖wn‖(s−1)p/q
r )‖vn − v‖s].
Since wn and yn are bounded in W 1,p0,G → Lp(Ω) ∩ Lr(Ω) and
W 1,q(Ω) → Lq(Ω) ∩ Ls(Ω), respectively, while un → u and vn → v
strongly in Lr(Ω) and Ls(Ω), respectively, choosing ε > 0 arbitrarilysmall, we obtain that F ′(wn, yn)(un − u, vn − v) → 0, as n → ∞. Butthis contradicts (4.25).
Lemma 4.3 Let λ ≥ 0 be fixed and let (un, vn) be a bounded sequencein W 1,p,q
0,G (Ω) such that
‖E′λ,G(un, vn)‖? → 0
as n → ∞. Then (un, vn) contains a strongly convergent subsequencein W 1,p,q
0,G (Ω).
Proof Because W 1,p,q0,G (Ω) is a reflexive Banach space and (un, vn) is
a bounded sequence, we can assume that
(un, vn) → (u, v) weakly in W 1,p,q0,G ; (4.26)
(un, vn) → (u, v) strongly in Lr(Ω)× Ls(Ω). (4.27)

4.4 Systems with sublinear potential 135
On the other hand, we have
E′λ,G(un, vn)(u− un, v − vn) =
∫
Ω
|∇un|p−2∇un(∇u−∇un)
+∫
Ω
|∇vn|q−2∇vn(∇v −∇vn)− λF ′G(un, vn)(u− un, v − vn)
and
E′λ,G(u, v)(un − u, vn − v) =
∫
Ω
|∇u|p−2∇u(∇un −∇u)
+∫
Ω
|∇v|q−2∇v(∇vn −∇v)− λF ′G(u, v)(un − u, vn − v).
Adding these two relations, one has
annot.=
∫
Ω
(|∇un|p−2∇un − |∇u|p−2∇u)(∇un −∇u)
+∫
Ω
(|∇vn|q−2∇vn − |∇v|q−2∇v)(∇vn −∇v)
= −E′λ,G(un, vn)(u− un, v − vn)− E′
λ,G(u, v)(un − u, vn − v)
−λF ′G(un, vn)(u− un, v − vn)− λF ′G(u, v)(un − u, vn − v).
Using (4.26) and (4.27), similar estimations as in Lemma 4.2 show thatthe last two terms tends to 0 as n →∞. Due to (4.26), the second termstends to 0, while the inequality
|E′λ,G(un, vn)(u− un, v − vn)| ≤ ‖E′
λ,G(un, vn)‖?‖(u− un, v − vn)‖1,p,q
and the assumption implies that the first term tends to 0 too. Thus,
limn→∞
an = 0. (4.28)
From the well-known inequality
|t−s|α ≤
(|t|α−2t− |s|α−2s)(t− s), if α ≥ 2,
((|t|α−2t− |s|α−2s)(t− s))α/2(|t|α + |s|α)(2−α)/2, if 1 < α < 2,
for all t, s ∈ RN , and (4.28), we conclude that
limn→∞
∫
Ω
(|∇un −∇u|p + |∇vn −∇v|q) = 0,
hence, the sequence (un, vn) converges strongly to (u, v) in W p,qG . ¤

136 Elliptic Systems of Gradient Type
Theorem 4.3 [255, Theorem 3] Let (Z, ‖·‖) be a separable and reflexivereal Banach space, let I ⊆ R be an interval, and let g : Z × I → R be acontinuous function satisfying the following conditions:
i) for every z ∈ Z, the function g(z, ·) is concave;ii) for every λ ∈ I, the function g(·, λ) is sequentially weakly lower
semicontinuous and continuously Gateaux differentiable, and satisfiesthe Palais-Smale condition, as well as
lim‖z‖→+∞
g(z, λ) = +∞;
iii) there exists a continuous concave function h : I → R such that
supλ∈I
infz∈Z
(g(z, λ) + h(λ)) < infz∈Z
supλ∈I
(g(z, λ) + h(λ)).
Then, there exist an open interval Λ ⊆ I and a number σ > 0 such thatfor each λ ∈ Λ, the function g(·, λ) has at least three critical points in X
having the norms less than σ.
Proof of Theorem 4.2. We will show that the assumptions of The-orem 4.3 are fulfilled for: Z = W 1,p,q
0,G (Ω), I = [0,∞[ and g = Eλ,G.We fix λ ≥ 0. It is clear that W 1,p,q
0,G (Ω) 3 (u, v) 7→ 1p‖u‖p
1,p + 1q‖v‖q
1,q
is sequentially weakly lower semicontinuous. Thus, from Lemma 4.2 itfollows that Eλ(·, ·) is also sequentially weakly lower semicontinuous.
First we prove that
lim‖(u,v)‖→∞
Eλ,G(u, v) = +∞. (4.29)
Indeed, from (F’4) ) and Holder’s inequality, one has
Eλ,G(u, v) ≥ 1p‖u‖p
1,p +1q‖v‖q
1,q − λ
∫
Ω
[a(x)|u|p1 + b(x)|v|q1 + c(x)]dx
≥ 1p‖u‖p
1,p +1q‖v‖q
1,q − λ[‖a‖µ/(µ−p1)‖u‖p1µ
+‖b‖ν/(ν−q1)‖v‖q1ν + ‖c‖1].
Since W 1,p0,G(Ω) → Lµ(Ω) and W 1,q
0,G(Ω) → Lν(Ω) are continuous, p1 < p
and q1 < q, then relation (4.29) yields immediately.We prove that Eλ,G(·, ·) satisfies the Palais-Smale condition: Let
(un, vn) be a sequence in W 1,p,q0,G (Ω) such that sup
n∈N|Eλ,G(un, vn)| <
+∞ andlim
n→∞‖E′
λ,G(un, vn)‖? = 0. According to (4.29), (un, vn)must be bounded
in W 1,p,q0,G (Ω). The conclusion follows now by Lemma 4.3.

4.4 Systems with sublinear potential 137
Now, we deal with iii): Let us define the function f : (0,∞) → R by
f(t) = supFG(u, v) :1p‖u‖p
1,p +1q‖v‖q
1,q ≤ t.
After integration in the inequality from Lemma 4.1 iii), then by usingthe Young inequality, the fact that the embedding W 1,p
0,G(Ω) → Lµ(Ω)and W 1,q
0,G(Ω) → Lν(Ω) are compact for µ ∈]p, p?[ and ν ∈]q, q?[ andthe relation ps = qr, we have that for an arbitrary ε > 0 there existsc(ε) > 0 such that
FG(u, v) ≤ ε(‖u‖p1,p + ‖v‖q
1,q) + c(ε)(‖u‖r1,p + ‖v‖s
1,q) (4.30)
for every (u, v) ∈ W 1,p,q0,G (Ω). Since the function x 7→ (ax + bx)1/x, x > 0
is non-increasing (a, b ≥ 0), and by using again ps = qr, one has that
‖u‖r1,p + ‖v‖s
1,q ≤[‖u‖p
1,p + ‖v‖q1,q
]r/p. (4.31)
Therefore,
f(t) ≤ εmaxp, qt + c(ε)(maxp, qt) rp , t > 0.
On the other hand, it is clear that f(t) ≥ 0, t > 0. Taking into accountthe arbitrariness of ε > 0 and the fact that r > p, we conclude that
limt→0+
f(t)t
= 0. (4.32)
By (F’5) it is clear that (u0, v0) 6= (0, 0) (note that FG(0, 0) = 0).Therefore, it is possible to choose a number η such that
0 < η < FG(u0, v0)[1p‖u0‖p
1,p +1q‖v0‖q
1,q
]−1
.
Due to (4.32), there exists t0 ∈(0, 1
p‖u0‖p1,p + 1
q‖v0‖q1,q
)such that
f(t0) < ηt0. Thus, f(t0) < FG(u0, v0)t0[
1p‖u0‖p
1,p + 1q‖v0‖q
1,q
]−1
. Letρ0 > 0 be such that
f(t0) < ρ0 < FG(u0, v0)t0
[1p‖u0‖p
1,p +1q‖v0‖q
1,q
]−1
. (4.33)
Define h : I = [0,∞) → R by h(λ) = ρ0λ. We prove that h fulfils theinequality iii) from Theorem 4.3.
Due to the choice of t0 and (4.33), one has
ρ0 < FG(u0, v0). (4.34)

138 Elliptic Systems of Gradient Type
The function
I 3 λ 7→ inf(u,v)∈W 1,p,q
0,G (Ω)
[1p‖u‖p
1,p +1q‖v‖q
1,q + λ(ρ0 −FG(u, v))]
is clearly upper semicontinuous on I. Thanks to (4.34), we have
limλ→∞
inf(u,v)∈W 1,p,q
0,G (Ω)(Eλ,G(u, v) + ρ0λ) ≤ lim
λ→∞
[1p‖u0‖p
1,p +1q‖v0‖q
1,q
+λ(ρ0 −FG(u0, v0))] = −∞.
Thus we find an element λ ∈ I such that
supλ∈I
inf(u,v)∈W 1,p,q
0,G (Ω)(Eλ,G(u, v) + ρ0λ) (4.35)
= inf(u,v)∈W 1,p,q
0,G (Ω)
[1p‖u‖p
1,p +1q‖v‖q
1,q + λ(ρ0 −FG(u, v))]
.
Since f(t0) < ρ0, for all (u, v) ∈ W 1,p,q0,G (Ω) such that 1
p‖u‖p1,p +
1q‖v‖q
1,q ≤ t0, we have F(u, v) < ρ0. Thus,
t0 ≤ inf
1p‖u‖p
1,p +1q‖v‖q
1,q : FG(u, v) ≥ ρ0
. (4.36)
On the other hand,
inf(u,v)∈W 1,p,q
0,G (Ω)supλ∈I
(Eλ,G(u, v)+ρ0λ) = inf(u,v)∈W 1,p,q
0,G (Ω)
[1p‖u‖p
1,p +1q‖v‖q
1,q
+supλ∈I
(λ(ρ0 −FG(u, v)))]
= inf
1p‖u‖p
1,p +1q‖v‖q
1,q : FG(u, v) ≥ ρ0
.
Thus, (4.36) is equivalent to
t0 ≤ inf(u,v)∈W 1,p,q
0,G (Ω)supλ∈I
(Eλ,G(u, v) + ρ0λ). (4.37)
There are two distinct cases:I) If 0 ≤ λ < t0/ρ0, we have
inf(u,v)∈W 1,p,q
0,G (Ω)
[1p‖u‖p
1,p +1q‖v‖q
1,q + λ(ρ0 −FG(u, v))]
≤ Eλ,G(0, 0) + ρ0λ = λρ0 < t0.
Combining the above inequality with (4.35) and (4.37), the desired re-lation from Theorem 4.3 iii) yields immediately.

4.4 Systems with sublinear potential 139
II) If t0/ρ0 ≤ λ, from (4.34) and (4.33) we obtain
inf(u,v)∈W 1,p,q
0,G (Ω)
[1p‖u‖p
1,p +1q‖v‖q
1,q + λ(ρ0 −FG(u, v))]
≤ 1p‖u0‖p
1,p +1q‖v0‖q
1,q + λ(ρ0 −FG(u0, v0))
≤ 1p‖u0‖p
1,p +1q‖v0‖q
1,q +t0ρ0
(ρ0 −FG(u0, v0)) < t0.
The conclusion holds similarly as in the first case.Thus, the hypotheses of Theorem 4.3 are fulfilled. This implies the
existence of an open interval Λ ⊂ [0,∞) and σ > 0 such that for allλ ∈ Λ the function Eλ,G(·, ·) has at least three distinct critical points inW 1,p,q
0,G (Ω) (denote them by (uiλ, vi
λ), i ∈ 1, 2, 3) and ‖(uiλ, vi
λ)‖ < σ.
Therefore ‖uiλ‖1,p < σ, ‖vi
λ‖1,q < σ, i ∈ 1, 2, 3.
Example 4.2 Let Ω = ω × R2, where ω is a bounded open interval inR. Let γ : Ω → R be a continuous, non-negative, not identically zero,axially symmetric function with compact support in Ω. Then, there existan open interval Λ ⊂ (0,∞) and a number σ > 0 such that for everyλ ∈ Λ, the system−∆3/2u = 5/2λγ(x)|u|1/2u cos(|u|5/2 + |v|3) in Ω−∆9/4v = 3λγ(x)|v|v cos(|u|5/2 + |v|3) in Ωu = v = 0 on ∂Ω,
has at least two distinct, nontrivial weak solutions with the propertiesfrom Theorem ??.
Indeed, let us choose F (x, u, v) = γ(x) sin(|u|5/2 + |v|3), r = 11/4,
s = 33/8. (F1) and (F’3) hold immediately. For (F’4) we choosea = b = 0, c = γ. Since γ is an axially symmetric function, suppγ
will be an id ×O(2)-invariant set, i.e., if (x, y) ∈ suppγ, then (x, gy) ∈suppγ for every g ∈ O(2). Therefore, it is possible to fix an elementu0 ∈ W
1,3/20,id×O(2)(Ω) such that u0(x) = (π/2)2/5 for every x ∈ suppγ.
Choosing v0 = 0, one has that∫
Ω
F (x, u0(x), v0(x))dx =∫
suppγ
γ(x) sin |u0(x)|5/2dx =∫
suppγ
γ(x)dx > 0.
The conclusion follows from Theorem ??. ¤

140 Elliptic Systems of Gradient Type
4.5 Shift solutions for gradient systems
In the above two section we was supposed that the function F : Ω×R2 →R is superlinear in (0, 0). If F is not superlinear in (0, 0) then theproblem (Sλ
p,q) cannot be handled with minimax type results. Usingrecent ideas of B. Ricceri [257] it is possible to prove a multiplicityresult obtaining shift solutions for problem (Sλ
p,q). Roughly speaking,under certain assumptions on the nonlinear term F we are able to showthat the existence of a real parameter λ > 0, and of a pair (u0, v0) ∈W 1,p
0 (Ω)×W 1,q0 (Ω) such that the problem
((Sλ(u0,v0)
) :
−∆p(‖u‖p′(q−1)1,p u) = λFu(x, u + u0, v + v0)
−∆q(‖u‖q′(p−1)1,q u) = λFv(x, u + u0, v + v0),
In this section we suppose that the function F has the following formF (x, u, v) = b(x)G(u, v), where G : R2 → R is of class C1 and b : Ω → Ris such that they fulfil the following conditions:(G) G(0, 0) = 0 and there exist real numbers k > 0, p1 ∈ ]0, p− 1[, andq1 ∈ ]0, q − 1[ with the following properties:
(i) For every u, v ∈ R we have |G′u(u, v)| ≤ k|u|p1 ;(ii) For every u, v ∈ R we have |G′v(u, v)| ≤ k|v|q1 .
(b) b : Ω → [0, +∞[ belongs to L1(Ω)∩L∞(Ω) and is not identically zeroand G = idm ×O(N −m) invariant.
The problem ((Sλ(u0,v0)
) can be reformulated in the following way:
For (u0, v0) ∈ W 1,p0 (Ω) × W 1,q
0 (Ω) and λ > 0 we denote by (Sλ(u0,v0)
)
the problem of finding (u, v) ∈ W 1,p0 (Ω) ×W 1,q
0 (Ω) such that for every(w1, w2) ∈ W 1,p
0 (Ω)×W 1,q0 (Ω) we have:
||u− u0||pq−p1,p 〈Ap(u− u0)), w1〉p − λ
∫
Ω
b(x)G′u(u(x), v(x))w1(x))dx = 0
||v − v0||pq−q1,q 〈Aq(v − v0)), w2〉q − λ
∫
Ω
b(x)G′v(u(x), v(x))w2(x))dx = 0.
In this case, the energy functional E(u0,v0),λ : W 1,p0 (Ω)×W 1,p
0 (Ω) → R
associated to the problem (Sλ(u0,v0)
) is given by:
E(u0,v0),λ(u, v) =||u− u0||pq
1,p + ||v − v0||pq1,q
p q− λJ(u, v), (4.38)

4.5 Shift solutions for gradient systems 141
where J : W 1,p,q0,G (Ω) → R is defined by
J(u, v) =∫
Ω
b(x)G(u(x), v(x))dx.
In standard way from the conditions (G) and (b) it follows that thefunction E(u0,v0),λ is of class C1 and its differential is given by:
E′(u0,v0),λ
(u, v)(w1, w2) = ||u− u0||pq−p1,p 〈Ap(u− u0), w1〉p +(4.39)
+||v − v0||pq−q1,q 〈Aq(v − v0), w2〉q − λJ ′(u, v)(w1, w2),
where
J ′(u, v)(w1, w2) =∫
Ω
[b(x)G′u(u, v)w1(x) + b(x)G′v(u, v)w2(x)]dx,
(4.40)for all (w1, w2) ∈ W 1,p
0 (Ω) ×W 1,p0 (Ω). The critical points of the func-
tional E(u0,v0),λ are the solutions of problem ((Sλ(u0,v0)
).In the sequel we will use the following notations:
(N1) || · || : W 1,p0 (Ω) ×W 1,q
0 (Ω) → R denotes the homogenized Minkowskitype norm defined by ||(u, v)|| = (||u||pq
1,p+||v||pq1,q)
1pq , for every (u, v) ∈
W 1,p0 (Ω)×W 1,q
0 (Ω). Throughout in this section the space W 1,p0 (Ω)×
W 1,q0 (Ω) is considered to be endowed with this norm. We have that
the space W 1,p0 (Ω)×W 1,q
0 (Ω) is a separable, uniformly convex, smoothreal Banach space. Note that the following inequality holds for every(u, v) ∈ W 1,p
0 (Ω)×W 1,q0 (Ω)
||u||1,p + ||v||1,q ≤ 2||(u, v)||. (4.41)
(N2) According to the Lions compact embedding theorem, for every r ∈[p, p?] and s ∈ [q, q?] the embedding W 1,p
0 (Ω) → Lr(Ω) and W 1,q0 (Ω) →
Ls(Ω) are compact. Therefore for the fixed numbers r ∈ [p, p?] ands ∈ [q, q?], there exists a positive real number c such that the followinginequalities hold for every (u, v) ∈ W 1,p
0 (Ω)×W 1,q0 (Ω)
||u||r ≤ c||u||1,p, ||v||s ≤ c||v||1,q. (4.42)
(N3) ν1 := rr−(p1+1) , ν2 := s
s−(q1+1) .(N4) From condition (G) it follows the inequaliy:
|F (x, y)−F (x, y)| ≤ k(|x|+ |x|)p1 |x− x|+k(|y|+ |y|)q1 |y− y|, (4.43)
for every (x, y), (x, y) ∈ R× R.

142 Elliptic Systems of Gradient Type
In the next as in above two section we denote with W 1,p,q0,G (Ω) the fixed
points set of the action G = idm × O(N −m) on W 1,p0 (Ω) ×W 1,q
0 (Ω).The norms ‖ · ‖1,p, ‖ · ‖1,q and ‖(·, ·)‖ restricted to W 1,p,q
0,G (Ω) we willdenote in the same way and we introduce the following notations JG =J |W 1,p,q
0,G (Ω), E(u0,v0),G = E(u0,v0),λ|W 1,p,q0,G (Ω).
Proposition 4.3 The function JG : W 1,p,q0,G (Ω) → R has the following
properties:
(a) There exists a positive real number C such that the inequality
|JG(u, v)| ≤ C(||u||p1+11,p + ||v||q1+1
1,q )
holds for every pair (u, v) ∈ W 1,p,q0,G (Ω).
(b) JG is sequentially weakly continuous.(c) For every (u, v), (w1, w2) ∈ W 1,p,q
0,G (Ω) we have
|J ′G(u, v)(w1, w2)| ≤ k(||b||ν1 ||u||p1r ||w1||r + ||b||ν2 ||v||q1
s ||w2||s).(4.44)
Proof (a) From (4.43) it follows that
|F (u(x), v(x))| ≤ k|u(x)|p1+1 + k|v(x)|q1+1
for every x ∈ Ω. Thus
|b(x)F (u(x), v(x))| ≤ k|b(x)||u(x)|p1+1 + k|b(x)||v(x)|q1+1. (4.45)
Using (4.45) and Holder’s inequality, we get
|JG(u, v)| ≤ k||b||ν1 ||u||p1+1r + k||b||ν2 ||v||q1+1
s .
Hence, in view of (4.42), we obtain
|JG(u, v)| ≤ k||b||ν1cp1+1||u||p1+1
1,p + k||b||ν2cq1+1||v||q1+1
1,q .
By taking C = maxk||b||ν1cp1+1, k||b||ν2c
q1+1, we obtain the assertedinequality.(b) In view of (4.43), for every (u, v), (u, v) ∈ W 1,p,q
0,G the following in-equality holds
|JG(u, v)− JG(u, v)| ≤ k
∫
Ω
b(x)(|u(x)|+ |u(x)|)p1 |u(x)− u(x)|dx
+k
∫
Ω
b(x)(|v(x)|+ |v(x)|)q1 |v(x)− v(x)|dx.

4.5 Shift solutions for gradient systems 143
Using Holder’s inequality (note that 1ν1
+ p1r + 1
r = 1 and 1ν2
+ q1s + 1
s =1), we get
|JG(u, v)− JG(u, v)| ≤ k||b||ν1 ||(|u|+ |u|)||p1r ||u− u||r (4.46)
+ k||b||ν2 ||(|v|+ |v|)||q1s ||v − v||s.
Now, let (un, vn)i∈N ⊂ W 1,p.q0,G (Ω) be a sequence which converges weakly
to (u, v) ∈ W 1,p.q0,G (Ω).
From (4.46) we obtain that the following inequality holds for everyn ∈ N
|JG(un, vn)− JG(u, v)| ≤ k2p1cp1Mp1 ||b||ν1 ||un − u||r (4.47)
+ k2q1cq1Mq1 ||b||ν2 ||vn − v||s.Because the embedding W 1,p
0,G(Ω) → Lr(Ω) and W 1,q0,G(Ω) → Ls(Ω) are
compact, follow that un → u and vn → v strongly in Lr(Ω) and Ls(Ω)respectively. From (4.47) follows that lim
n→∞J(un, vn) = J(u, v), which
prove the assertion.(c) Pick (u, v), (w1, w2) ∈ W 1,p,q
0,G (Ω). From the Mean Value Theoremand (G) we have:
|F ′((u(x), v(x))(w1(x), w2(x))| ≤ k|u(x)|p1 |w1(x)|+ k|v(x)|q1 |w2(x)|.(4.48)
From Holder’s inequality it follows that
|J ′G(u, v)(w1, w2)| ≤ k(||b||ν1 ||u||p1r ||w1||r + ||b||ν2 ||v||q1
s ||w2||s).
Proposition 4.4 Let (u0, v0) ∈ W 1,p,q0,G (Ω) and λ > 0. The energy
functional E(u0,v0),G satisfies the following conditions:
(a) E(u0,v0),G is coercive.(b) E(u0,v0),G verifies the Palais-Smale condition.(c) E(u0,v0),G is weakly lower semicontinuous.
Proof (a) According to assertion (a) of Proposition 4.3, the followinginequality holds for every (u, v) ∈ W 1,p,q
0,G (Ω)
||u− u0||pq1,p
pq−λC||u||p1+1
1,p +||v − v0||pq
1,q
pq−λC||v||q1+1
1,q ≤ E(u0,v0),G(u, v).
(4.49)

144 Elliptic Systems of Gradient Type
Define g : W 1,p0,G(Ω) → R and h : W 1,q
0,G(Ω) → R by
g(u) =||u− u0||pq
1,p
pq−λC||u||p1+1
1,p and h(v) =||v − v0||pq
1,q
pq−λC||v||q1+1
1,q .
Using these notations, (4.49) can be rewritten as
g(u) + h(v) ≤ E(u0,v0),G(u, v), for all (u, v) ∈ W 1,p,q0,G (Ω). (4.50)
For u 6= 0 we have
g(u) = ||u||p1,p
(||u− u0||pq
1,p
pq||u||p1,p
− λC||u||p1+1−p1,p
)
= ||u||p1,p
(||u− u0||p1,p
pq||u||p1,p
||u− u0||pq−p1,p − λC||u||p1+1−p
1,p
).
Since lim||u||1,p→∞
||u− u0||p1,p
||u||p1,p
= 1, lim||u||1,p→∞
||u−u0||pq−p1,p = +∞ (because
pq − p > 0), and lim||u||1,p→∞
||u||p1+1−p1,p = 0 (recall that p1 < p − 1),
we obtain that lim||u||1,p→∞
g(u) = +∞. Hence, g is coercive. A similar
argument yields that h is coercive. Since g and h are continuous, itfollows from (4.50) that E(u0,v0),G is coercive.(b) Let (un, vn) be a sequence (PS) sequence in W 1,p,q
0,G (Ω) for thefunction E(u0,v0),G, that is
(PS1) E(u0,v0),G(un, vn) is bounded,(PS2) E′
(u0,v0),G(un, vn) → 0.
From the coercivity of the function E(u0,v0),G follows that the sequence(un, vn) is bounded in W 1,p,q
0,G (Ω). As in Lemma 4.3 with some mirrormodifications we obtain that the function E(u0,v0),G satisfies the (PS)condition.(c) The map (u, v) ∈ W 1,p,q
0,G (Ω) 7−→ ||(u,v)−(u0,v0)||pq
pq ∈ R is weaklylower semicontinuous, since all its lower level sets are weakly closed(recall that W 1,p,q
0,G (Ω) is reflexive, since it is uniformly convex). Themap (u, v) ∈ W 1,p,q
0,G (Ω) 7−→ −λJG(u, v) ∈ R is sequentially weakly con-tinuous (according to assertion (b) of Proposition 4.3), hence the mapE(u0,v0),G is sequentially weakly lower semicontinuous. Since E(u0,v0),G
is coercive, the Eberlein-Smulyan theorem implies that E(u0,v0),G isweakly lower semicontinuous.
T The main result of this section is the following.

4.5 Shift solutions for gradient systems 145
Theorem 4.4 Assume that the hypotheses (G) and (b) hold, and thatthe function JG is not constant. Then, for every σ ∈] inf
W 1,p,q0,G (Ω)
JG, supW 1,p,q
0,G (Ω)
JG[
and every (u0, v0) ∈ J−1(]−∞, σ[), one of the following alternatives istrue:
(A1) There exists λ > 0 such that the function E(u0,v0),G has at leastthree critical points in W 1,p,q
0,G (Ω).
(A2) There exists (u∗, v∗) ∈ J−1G (σ) such that, for all (u, v) ∈ J−1
G ([σ, +∞[)\(u∗, v∗), the inequality
‖(u, v)− (u0, v0)‖ > ||(u∗, v∗)− (u0, v0)||
holds.
Proof Fix σ ∈] infW 1,p,q
0,G (Ω)JG, sup
W 1,p,q0,G (Ω)
JG[, (u0, v0) ∈ J−1(]−∞, σ[), and
assume that (A1) does not hold. This implies that for every λ > 0the function E(u0,v0),G has at most one local minimum in W 1,p,q
0,G (Ω).Indeed, the existence of two local minima of E(u0,v0),G would imply, bythe mountain pass theorem of zero altitude 1.8 (recall that, accordingto assertion (b) of Proposition 4.4, the function E(u0,v0),G satisfies thePalais-Smale condition) that this function has a third critical point. Thiswould contradict our assumption that (A1) does not hold.
We are going to prove that in this case (A2) is satisfied. For thispurpose we apply the following result that is due to Ricceri ([257], The-orem 1).
Theorem 4.5 Let X be a topological space, Λ a real interval, and f :X × Λ → R a function satisfying the following conditions:
(i) For every x ∈ X, the function f(x, ·) is quasi–concave and continuous.(ii) For every λ ∈ Λ, the function f(·, λ) is lower semicontinuous and each
of its local minima is a global minimum.(iii) There exist ρ0 > sup
ΛinfX
f and λ0 ∈ Λ such that x ∈ X : f(x, λ0) ≤ρ0 is compact.
Then,
supΛ
infX
f = infX
supΛ
f.

146 Elliptic Systems of Gradient Type
Set Λ := [0, +∞[ and define the map f : W 1,p,q0,G (Ω)× Λ → R by
f(u, v, λ) = E(u0,v0),G(u, v)+λσ =||(u, v)− (u0, v0)||pq
pq+λ(σ−JG(u, v)).
We consider the space W 1,p,q0,G (Ω) be equipped with the weak topology.
Our aim is to show that f satisfies the conditions (i), (ii), and (iii)of Theorem 4.5. Observe that for every (u, v) ∈ W 1,p,q
0,G (Ω) the mapf(u, v, ·) : Λ → R is afine, thus it is quasi-concave and continuous, that is,condition (i) is fulfilled. Next we prove that condition (ii) is also satisfied.For this fix a real number λ ≥ 0. By assertion (c) of Proposition 4.4 weknow that f(·, λ) is (weakly) lower semicontinuous. Assume now thatf(·, λ) has a local minimum which is not global. Since f(·, λ) is coercive(by assertion (a) of Proposition 4.4) and weakly lower semicontinuous,it has a global minimum. Thus, f(·, λ) has at least two local minima.It follows that E(u0,v0),G has at least two local minima, too, which isimpossible by the assumption and the remark made at the beginning ofthe proof. We conclude that condition (ii) holds. To prove that condition(iii) is also satisfied we show first that sup
Λinf
W 1,p,q0,G (Ω)
f(u, v, λ) < +∞. For
this choose (u1, v1) ∈ W 1,p,q0,G (Ω) such that σ < J(u1, v1). For every λ ∈ Λ
we have
infW 1,p,q
0,G (Ω)f(u, v, λ) ≤ f(u1, v1, λ) ≤ ‖(u1, v1)− (u0, v0)‖pq
pq, (4.51)
hence supΛ
infW 1,p,q
0,G (Ω)f(u, v, λ) < +∞. For every ρ0 > sup
Λinf
W 1,p,q0,G (Ω)
f(u, v, λ)
the set (u, v) ∈ W 1,p,q0,G (Ω) | f(u, v, 0) ≤ ρ0 is weakly compact, thus
condition (iii) is satisfied. Applying Theorem 4.5, we obtain
α := supΛ
infW 1,p,q
0,G (Ω)f = inf
W 1,p,q0,G (Ω)
supΛ
f. (4.52)
Note that the function λ ∈ Λ 7−→ infW 1,p,q
0,G (Ω)f(u, v, λ) is upper semicontin-
uous, since for every (u, v) ∈ W 1,p,q0,G (Ω) the map f(u, v, ·) is continuous.
Also, the first inequality of (4.51) yields that
limλ→+∞
infW 1,p,q
0,G (Ω)f(u, v, λ) = −∞.
Thus, the map λ ∈ Λ 7−→ infW 1,p,q
0,G (Ω)f(u, v, λ) is upper bounded and

4.5 Shift solutions for gradient systems 147
attains its maximum at a point λ∗ ∈ Λ. Hence,
α = supΛ
infW 1,p,q
0,G (Ω)f = inf
W 1,p,q0,G (Ω)
( ||(u, v)− (u0, v0)||pq
pq+ λ∗(σ − JG(u, v))
).
(4.53)On the other hand, we have for every (u, v) ∈ W 1,p,q
0,G (Ω) that
supΛ
f(u, v, λ) =
+∞, if σ > JG(u, v)
||(u,v)−(u0,v0)||pq
pq , if σ ≤ JG(u, v).
In view of (4.52) it follows that
α = infJ−1
G ([σ,+∞[)
( ||(u, v)− (u0, v0)||pq
pq
).
Since the map (u, v) ∈ W 1,p,q0,G (Ω) 7−→ ||(u,v)−(u0,v0)||pq
pq ∈ R is weaklylower semicontinuous and coercive, and since the set J−1
G ([σ, +∞[) isweakly closed and nonempty, there exists a pair (u∗, v∗) ∈ J−1
G ([σ,+∞[)such that
α =||(u∗, v∗)− (u0, v0)||pq
pq. (4.54)
Observe that λ∗ > 0. Otherwise, λ∗ = 0, which implies α = 0, hence(u0, v0) = (u∗, v∗), which is impossible since JG(u0, v0) < σ.
The relations (4.53) and (4.54) yield that
||(u∗, v∗)− (u0, v0)||pq
pq≤ ||(u∗, v∗)− (u0, v0)||pq
pq+ λ∗(σ − JG(u∗, v∗)),
thus JG(u∗, v∗) = σ. This implies (by (4.53)) that (u∗, v∗) is a globalminimum of E(u0,v0),G. By the assumption and the remark at the be-ginning of the proof this pair is the only global minimum of E(u0,v0),G.Thus, for every pair (u, v) ∈ J−1
G ([σ,+∞[) \ (u∗, v∗), the inequality‖(u, v)− (u0, v0)‖ > ||(u∗, v∗)− (u0, v0)|| holds. We conclude that (A2)is satisfied.
Corollary 4.1 Assume that the hypotheses of Theorem 4.4 are fulfilled.If S is a convex dense subset of W 1,p,q
0,G (Ω), and if there exists
σ ∈] infW 1,p,q
0,G (Ω)JG, sup
W 1,p,q0,G (Ω)
JG[
such that the level set J−1G ([σ,+∞[) is not convex, then there exist
(u0, v0) ∈ J−1G (]−∞, σ[)∩S and λ > 0 such that the function E(u0,v0),G

148 Elliptic Systems of Gradient Type
has at least three critical points in W 1,p,q0,G (Ω), i.e., there exist (u0, v0) ∈
J−1G (] −∞, σ[) ∩ S and λ > 0 such that problem ((Sλ
(u0,v0)) has at least
three solutions in W 1,p,q0,G (Ω).
Proof Since JG is sequentially weakly continuous (by assertion (c) ofProposition 4.3), the level set M := J−1([σ,+∞[) is sequentially weaklyclosed. Theorem A.1 yields the existence of pairwise distinct pairs(u0, v0) ∈ S, (u1, v1), (u2, v2) ∈ M such that
||(u1, v1)− (u0, v0)|| = ||(u2, v2)− (u0, v0)|| = inf(u,v)∈M
||(u, v)− (u0, v0)||.
It follows that (u0, v0) /∈ M , that is, JG(u0, v0) < σ. Also, the above re-lations show that alternative (A2) of Theorem 4.4 does not hold. Hence(A1) must be satisfied, i.e., there exists λ > 0 such that the functionE(u0,v0),G has at least three critical points in W 1,p,q
0,G (Ω). Using the Prin-ciple of Symmetric Criticality, we conclude that problem ((Sλ
(u0,v0))
has at least three solutions in W 1,p0 (Ω)×W 1,p
0 (Ω).
Remark. The assumption of Corollary 4.1 stating that there existsσ ∈] inf
W 1,p,q0,G (Ω)
J, supW 1,p,q
0,G (Ω)
J [ such that the level set J−1([σ,+∞[) is not
convex is equivalent to the fact that J is not qvasi-concave.A direct application of Corollary 4.1 is the following.
Theorem 4.6 Let G : R2 → [0, +∞[ be a function which is not quasi-concave and which satisfies condition (G). Let b : Ω → [0,+∞[ be aG-invariant function with b(0) > 0 and for which condition (b) holds,and assume that S is a convex dense subset of W 1,p,q
0,G (Ω). Then, thereexist (u0, v0) ∈ S and λ > 0 with the property that problem ((Sλ
(u0,v0))
has at least three solutions in W 1,p0 (Ω)×W 1,p
0 (Ω).
Proof We are going to apply Corollary 4.1 to the spaces W 1,p0,G(Ω) and
W 1,q0,G(Ω) and to the map J |W 1,p,q
0,G (Ω). First we prove that J |W 1,p,q0,G (Ω) is
not constant. For this we assume, by contradiction, that J |W 1,p,q0,G (Ω)(u, v) =
J |W 1,p,q0,G (Ω)(0, 0) = 0 for every (u, v) ∈ W 1,p,q
0,G (Ω).Since b ≥ 0 and F ≥ 0, it follows that b(x)F (u(x), v(x)) = 0 for ev-ery (u, v) ∈ W 1,p,q
0,G (Ω) and a.e. x ∈ Ω. Since b(0) > 0, there existsa real number R > 0 such that the closed ball B centered in 0 withradius R is contained in Ω and b(x) > 0 for a.e. x ∈ B. Consequently,G(u(x), v(x)) = 0 for every (u, v) ∈ W 1,p,q
0,G (Ω) and a.e. x ∈ B. Since F

4.5 Shift solutions for gradient systems 149
is not constant, there exist s0, t0 ∈ R such that G(s0, t0) > 0. Choosingu ∈ W 1,p
0,G(Ω) and v ∈ W 1,q0,G(Ω) such that u(x) = s0 and v(x) = t0 for
every x ∈ B, we get a contradiction.We show that J |W 1,p,q
0,G (Ω) is not quasi-concave. It follows from abovethat
t :=∫
B
b(x)dx > 0.
The fact that G is not quasi-concave implies the existence of a realnumber ρ0 ∈]0, sup
R×RG[ such that G−1([ρ0, +∞[) is not convex. Thus, we
find ρ ∈ R, α ∈]0, 1[, and (si, ti) ∈ R2, i ∈ 1, 2, 3, with the followingproperties
(s2, t2) = α(s1, t1)+(1−α)(s3, t3), G(s1, t1) > ρ, G(s3, t3) > ρ, G(s2, t2) < ρ.
Let
M := maxF (x, y) | |x| ≤ max|s1|, |s3|, |y| ≤ max|t1|, |t3|.Choose R1 > R and ε > 0 such that
‖b‖∞Mmeas(A) < ε < t|F (si, ti)− ρ|, for i ∈ 1, 2, 3,where A := x ∈ Ω : R < |x| < R1 and meas(A) stays for the Lebesguemeasure of A. For i ∈ 1, 3 let ui, vi ∈ C∞c (Ω) be G-invariant functionssuch that ||ui||∞ = |si|, ||vi||∞ = |ti|,
ui(x) =
si, |x| ≤ R
0, |x| ≥ R1,
and vi(x) =
ti, |x| ≤ R
0, |x| ≥ R1.
Put (u2, v2) := α(u1, v1)+(1−α)(u3, v3). It follows that u2, v2 ∈ C∞c (Ω),||u2||∞ ≤ α|s1|+ (1− α)|s3|, ||v2||∞ ≤ α|t1|+ (1− α)|t3|,
u2(x) =
s2, |x| ≤ R
0, |x| ≥ R1,
and v2(x) =
t2, |x| ≤ R
0, |x| ≥ R1.
Let i ∈ 1, 2, 3. Note that for every x ∈ Ω the following inequalitieshold
|ui(x)| ≤ ||ui||∞ ≤ max|s1|, |s3| and |vi(x)| ≤ ||vi||∞ ≤ max|t1|, |t3|,thus
0 ≤ b(x)G(ui(x), vi(x)) ≤ ||b||∞M.

150 Elliptic Systems of Gradient Type
Since
J |W 1,p,q0,G (Ω)(ui, vi) =
∫
B
b(x)G(ui(x), vi(x))dx +∫
A
b(x)G(ui(x), vi(x))dx
= G(si, ti)t +∫
A
b(x)G(ui(x), vi(x))dx,
we conclude that, for i ∈ 1, 3,J |W 1,p,q
0,G (Ω)(ui, vi) ≥ G(si, ti)t− ||b||∞Mmeas(A) > G(si, ti)t− ε > tρ.
and
J |W 1,p,q0,G (Ω)(u2, v2) ≤ G(s2, t2)t + ||b||∞Mmeas(A) < G(s2, t2)t + ε < tρ.
Thus J |W 1,p,q0,G (Ω) is not quasi-concave. Therefore, Corollary 4.1 yields
the existence of a pair (u0, v0) ∈ S and of a real number λ > 0 suchthat the function E(u0,v0),G|W 1,p,q
0,G (Ω) has at least three critical points in
W 1,p,q0,G (Ω). In order to ensure that these points are also critical points of
E(u0,v0),G, we have to show that E(u0,v0),G is G-invariant. For this pickarbitrary (u, v) ∈ W 1,p,q
0,G (Ω) and g ∈ G. Then,
E(u0,v0),G(g · u, g · v) = ||(g·u,g·v)−(u0,v0)||pq
pq − λJ(g · u, g · v)
= ||(g·u,g·v)−(g·u0,g·v0)||pq
pq − λ
∫
Ω
b(x)G((g · u)(x), (g · v)(x))dx.
Using the formula for the change of variable, and taking into accountthat b is G-invariant and that the elements of G are orthogonal maps(hence the absolute value of the determinant of their matrices is 1), weconclude that
E(u0,v0),G(g · u, g · v) =||(u, v)− (u0, v0)||pq
pq− λ
∫
Ω
b(x)G(u(x), v(x))dx
= E(u0,v0),G(u, v).
So, by Principle of Symmetric criticality, every critical point of E(u0,v0),G
is also a critical point of E(u0,v0),λ. The conclusion follows now fromCorollary 4.1.
Example 4.3 We give an example of a non-constant function F : R2 →[0, +∞) which satisfies the conditions required in the hypotheses of The-orem 4.6. Let γ, δ ∈ R be such that 1 < γ < p and 1 < δ < q. DefineF : R2 → R by
F (u, v) = |u|γ + |v|δ.

4.6 Comments and historical notes 151
Then, F is convex and of class C1 and satisfies the condition (G). Therelations
F (0, 0) = F
(12(−1, 0) +
12(1, 0)
)= 0 < 1 = F (−1, 0) = F (1, 0)
show that F is not quasi-concave.
4.6 Comments and historical notes
In the last few years many paper is dedicated to study the existence andmultiplicity of solutions for gradient, Hamiltonian and non-variationalsystems on bounded or unbounded domain. For this see the papers ofde Figueiredo and his collaborators.
The motivation to investigate elliptic eigenvalue problems on suchdomains arises from Mathematical Physics, see for instance Amick [8],Amick and Toland [9]; the mathematical development was initiated byEsteban [107], Grossinho and Tersian [132], Fao and Zhao [110]. Manypapers study the existence and multiplicity of solutions for elliptic sys-tems defined on unbounded domains, see Bartsch and de Figueiredo[27], Bartsch and Wang [31], Costa [75], Dinu [90], Grossinho [131] andKristaly [163], [164], [167]. The main tools used in the aforementionedpapers are based on Mountain Pass Theorems and on the symmetric ver-sion of Mountain Pass Theorem, when the energy functional associatedto problem (Sλ) satisfies the (PS) condition.

5
Systems with arbitrary growth nonlinearities
The universe is not required tobe in perfect harmony withhuman ambition.
Carl Sagan (1934–1996)
In this chapter we are dealing with the elliptic system−∆u = vp in Ω;−∆v = f(u) in Ω;u = v = 0 on ∂Ω,
where 0 < p < 2N−2 , Ω is a bounded domain in RN , and the continuous
nonlinear term f has an arbitrary growth near the origin or at infinity.Here and in the sequel, we use the notation sα = sgn(s)|s|α, α > 0.
5.1 Introduction
We consider the elliptic system−∆u = g(v) in Ω;−∆v = f(u) in Ω;u = v = 0 on ∂Ω,
(S)
where Ω ⊂ RN (N ≥ 2) is an open bounded domain with smooth bound-ary, and f, g : R→ R are continuous functions.
In the particular case when g(s) = sp, f(s) = sq (p, q > 1) and N ≥ 3,system (S) has been widely studied replacing the usual criticality notion(i.e., p, q ≤ N+2
N−2 ) by the so-called ”critical hyperbola” which involves
152

5.1 Introduction 153
both parameters p and q, i.e., those pairs of points (p, q) ∈ R2+ which
verify
1p + 1
+1
q + 1= 1− 2
N. (CH)
Points (p, q) on this curve meet the typical non-compactness phenomenonof Sobolev embeddings and non-existence of solutions for (S) has beenpointed out by Mitidieri [211] and van der Vorst [287] via Pohozaev-typearguments. On the other hand, when
1 >1
p + 1+
1q + 1
> 1− 2N
, (5.1)
the existence of nontrivial solutions for (S) has been proven by deFigueiredo and Felmer [112], Hulshof, Mitidieri and van der Vorst [141].Note that the latter results work also for nonlinearities g(s) ∼ sp andf(s) ∼ sq as |s| → ∞ with (p, q) fulfilling (5.1). The points verifying(5.1) form a proper region in the first quadrant of the (p, q)-plane situ-ated below the critical hyperbola (CH). Note that (5.1) is verified forany p, q > 1 whenever N = 2.
In spite of the aforementioned results, the whole region below (CH)is far to be understood from the point of view of existence/multiplicityof solutions for (S). Via a Mountain Pass argument, de Figueiredo andRuf [118] proved the existence of at least one nontrivial solution to theproblem
−∆u = vp in Ω;−∆v = f(u) in Ω;u = v = 0 on ∂Ω,
(S)
when
0 < p, if N = 2;0 < p < 2
N−2 , if N ≥ 3,(5.1)
and f : R→ R has a suitable superlinear growth at infinity, formulatedin the term of the Ambrosetti-Rabinowitz condition. Later, Salvatore[266] guaranteed via the Pohozaev’s fibering method the existence of awhole sequence of solutions to (S) in a similar context as [118] assumingin addition that the nonlinear term f is odd. Note that in both papers(i.e., [118] and [266]) no further growth restriction is required on thenonlinear term f other than the Ambrosetti-Rabinowitz condition. Thislatter fact is not surprising taking into account that (5.1) is actually

154 Systems with Arbitrary Growth Nonlinearities
equivalent to
1 >1
p + 1> 1− 2
N,
which is nothing but a ”degenerate” case of (5.1) putting formally q =∞, i.e., the growth of f may be arbitrary large.
This chapter is divided into two parts, in both cases we guarantee theexistence of infinitely many pairs of distinct solutions to the system (S)when (5.1) holds. In one hand, in Section 5.2 the nonlinear term f hasan oscillatory behaviour. Moreover, the nonlinear term f may enjoy anarbitrary growth at infinity (resp., at zero) whenever it oscillates nearthe origin (resp., at infinity) in a suitable way. In addition, the size ofour solutions reflects the oscillatory behaviour of the nonlinear term, seerelations (5.6) and (5.12) below; namely, the solutions are small (resp.,large) in L∞-norm and in a suitably chosen Sobolev space whenever thenonlinearity f oscillates near the origin (resp., at infinity). We emphasizethat no symmetry condition is required on f . These results are proved bymeans of Ricceri’s variational principle, see Theorem 1.16. On the otherhand, in Section 5.3 the odd nonlinear term f fulfills an Ambrosettti-Rabinowitz type condition and the one-parametric fibering method isused in order to prove the existence of a whole sequence of solutions to(S).
Note that system (S) is equivalent to the Poisson equation−∆(−∆u)
1p = f(u) in Ω;
u = ∆u = 0 on ∂Ω.(P )
The suitable functional space where solutions of (P ) is going to be soughtis
X = W 2, p+1p (Ω) ∩W
1, p+1p
0 (Ω)
endowed with the norm
‖u‖X =(∫
Ω
|∆u| p+1p dx
) pp+1
.
Due to (5.1) one has p+1p > 1 + N−2
2 = N2 , therefore W 2, p+1
p (Ω) ⊂⊂C(Ω), so
X ⊂⊂ C(Ω). (5.2)
For further use, we denote by κ0 > 0 the best embedding constant of

5.2 Elliptic systems with oscillatory terms 155
X ⊂⊂ C(Ω). The energy functional associated to the Poisson problem(P ) is E : X → R defined by
E(u) =p
p + 1‖u‖
p+1p
X −F(u) where F(u) =∫
Ω
F (u(x))dx.
Due to (5.2), the functional E is well-defined, is of class C1 on X and
E′(u)(w) =∫
Ω
(−4u)1p (−4w)dx−
∫
Ω
f(u)wdx, u, w ∈ X.
Note that if u ∈ X is a critical point of E then it is a weak solutionof problem (P ); in such a case, the pair (u, (−∆u)
1p ) ∈ X × X is a
weak solution of system (S). See also [118, Subsection 3.1] and [266,Proposition 2.1]. Moreover, standard regularity arguments show thatthe pair (u, (−∆u)
1p ) ∈ X × X is actually a strong solution of system
(S), see [118].
5.2 Elliptic systems with oscillatory terms
First of all, we are going to construct a special element in the space X
which will play a crucial role in our proofs. Let x0 ∈ Ω and R > 0 besuch that B(x0, R) ⊂ Ω; here and in the sequel, B(x0, a) = x ∈ RN :|x− x0| < a, a > 0. Let 0 < r < R be fixed. We consider the functionw : Ω → R defined by
w(x) =
∫ −|x−x0|−∞ α(t)dt∫ −r
−Rα(t)dt
, (5.3)
where α : R→ R is given by
α(t) =
e
1(t+R)(t+r) , if t ∈]−R,−r[;
0, if t /∈]−R,−r[.
It is clear that w ∈ C∞0 (Ω) ⊂ X; moreover, w ≥ 0, ‖w‖∞ = 1 and
w(x) =
1, if x ∈ B(x0, r);0, if x ∈ Ω \B(x0, R).
(5.4)
Lemma 5.1 Let ak, bk ⊂]0,∞[ be two sequences such that ak < bk,
limk→∞ ak/bk = 0, and sgn(s)f(s) ≤ 0 for every |s| ∈ [ak, bk]. Letsk = (bk/κ0)
p+1p . Then,
a) max[−bk,bk] F = max[−ak,ak] F ≡ F (sk) with sk ∈ [−ak, ak].
b) ‖skw‖p+1
p
X < sk for k ∈ N large enough.

156 Systems with Arbitrary Growth Nonlinearities
Proof a) It follows from the standard Mean Value Theorem and fromthe hypotheses that sgn(s)f(s) ≤ 0 for every |s| ∈ [ak, bk].
b) Since limk→∞ ak/bk = 0, we may fix k0 ∈ N such that ak/bk <
κ−10 ‖w‖−1
X for k > k0. Then, one has ‖skw‖p+1
p
X = |sk|p+1
p ‖w‖p+1
p
X ≤a
p+1p
k ‖w‖p+1
p
X < (bk/κ0)p+1
p = sk.
As we pointed out, the results of this section are based on Ricceri’svariational principle, see Theorem 1.16. In our framework concerningproblem (P ) (thus, system (S)), Ψ, Φ : X → R are defined by
Ψ(u) = ‖u‖p+1
p
X , Φ(u) = −F(u), u ∈ X.
Standard arguments show that Ψ and Φ are sequentially weakly lowersemicontinuous. The energy functional becomes E = p
p+1Ψ + Φ. More-over the function from (1.24) takes the form
ϕ(s) = inf‖u‖p+1
X <sp
supF(v) : ‖v‖p+1X ≤ sp − F(u)
s− ‖u‖p+1
p
X
, s > 0. (5.5)
Now, we are in the position to state our first result. Let f ∈ C(R,R)and F (s) =
∫ s
0f(t)dt, s ∈ R. We assume that:
(H10 ) −∞ < lim infs→0
F (s)
|s|p+1
p
≤ lim sups→0F (s)
|s|p+1
p
= +∞,
(H20 ) there exist two sequences ak and bk in ]0,∞[ with bk+1 <
ak < bk, limk→∞ bk = 0 such that
sgn(s)f(s) ≤ 0 for every |s| ∈ [ak, bk], and
(H30 ) limk→∞ ak
bk= 0 and limk→∞
max[−ak,ak] F
bp+1
pk
= 0.
Remark 5.1 Hypotheses (H10 ) − (H2
0 ) imply an oscillatory behaviourof f near the origin while (H3
0 ) is a technical assumption which seemsto be indispensable in our arguments.
In the sequel, we provide a concrete example when hypotheses (H10 )−
(H30 ) are fulfilled. Let ak = k−kk+1
and bk = k−kk
, k ≥ 2 and a1 =1, b1 = 2. It is clear that bk+1 < ak < bk, limk→∞ ak/bk = 0, and

5.2 Elliptic systems with oscillatory terms 157
limk→∞ bk = 0. Let f : R→ R be defined by
f(s) =
ϕk
(s−bk+1
ak−bk+1
), s ∈ [bk+1, ak], k ≥ 1;
0, s ∈]ak, bk[, k ≥ 1;0, s ∈]−∞, 0];g(s), s ∈ [2,∞[,
where g : [2,∞[→ R is any continuous function with g(2) = 0, andϕk : [0, 1] → [0,∞[ is a sequence of continuous functions such thatϕk(0) = ϕk(1) = 0 and there are some positive constants c1 and c2 suchthat
c1(b2p+2
p
k −b2p+2
p
k+1 )(ak−bk+1)−1 ≤∫ 1
0
ϕk(s)ds ≤ c2(bp+2
p
k −bp+2
p
k+1)(ak−bk+1)−1.
Note that F (s) = 0 for every s ∈] −∞, 0] and F is non-decreasing on
[0, 2], while c1b2p+2
p
k ≤ F (ak) = max[−ak,ak] F ≤ c2bp+2
p
k . Due to theseinequalities, each hypotheses from above are verified.
Theorem 5.1 Assume that (5.1) holds and f ∈ C(R,R) fulfills (H10 )−
(H30 ). Then, system (S) possesses a sequence (uk, vk) ⊂ X × X of
distinct (strong) solutions which satisfy
limk→∞
‖uk‖X = limk→∞
‖vk‖X = limk→∞
‖uk‖∞ = limk→∞
‖vk‖∞ = 0. (5.6)
The proof of Theorem 5.1 is based on the following two lemmas; thus,we assume the hypotheses of Theorem 5.1 are fulfilled. Let ak and bkbe as in the hypotheses. We recall from (1.25) that δ = lim infs→0+ ϕ(s)where ϕ comes from (5.5).
Lemma 5.2 δ = 0.
Proof By definition, δ ≥ 0. Suppose that δ > 0. By the first inequalityof (H1
0 ), there exist two positive numbers `0 and %0 such that
F (s) > −`0|s|p+1
p for every s ∈]− %0, %0[. (5.7)
Furthermore, let sk, sk be as in Lemma 5.1 and let wk = skw ∈ E,
where w is defined in (5.3). By (H30 ) and condition limk→∞ sk
bk= 0
(|sk| ≤ ak), there exists k0 ∈ N such that for k > k0 we have
m(Ω)F (sk)
bp+1
p
k
+(
δ
2‖w‖
p+1p
X + m(Ω)`0
)( |sk|bk
) p+1p
<δ
2κp+1
p
0
. (5.8)

158 Systems with Arbitrary Growth Nonlinearities
Let v ∈ E be arbitrarily fixed with ‖v‖p+1
p
X ≤ sk. Thus, due to theembedding from (5.2), we have ‖v‖∞ ≤ bk. Due to Lemma 5.1 a), weobtain
F (v(x)) ≤ max[−bk,bk]
F = F (sk) for every x ∈ Ω.
Since 0 ≤ |wk(x)| ≤ |sk| < %0 for large k ∈ N and for all x ∈ Ω, takinginto account (5.7) and (5.8), it follows that
sup‖v‖p+1
X ≤spk
F(v)−F(wk) = sup
‖v‖p+1
pX ≤sk
∫
Ω
F (v)dx−∫
Ω
F (wk)dx
≤ m(Ω)F (sk) + m(Ω)`0|sk|p+1
p
<δ
2(sk − ‖wk‖
p+1p
X ).
Since ‖wk‖p+1
p
X < sk (cf. Lemma 5.1 b)), and sk → 0 as k → ∞, weobtain
δ ≤ lim infk→∞
ϕ(sk) ≤ lim infk→∞
sup‖v‖p+1X ≤sp
kF(v)−F(wk)
sk − ‖wk‖p+1
p
X
≤ δ
2,
contradiction. This proves our claim.
Lemma 5.3 0 is not a local minimum of E = pp+1Ψ + Φ.
Proof Let `0 > 0 and %0 > 0 from the proof of Lemma 5.2, and x0 ∈ Ωand r,R > 0 from the definition of the function w, see (5.3). Let L0 > 0be such that
rNωNL0 − p
p + 1‖w‖
p+1p
X − (RN − rn)ωN `0 > 0, (5.9)
where ωN is the volume of the N -dimensional unit ball. By the righthand side of (H1
0 ) we deduce the existence of a sequence s0k ⊂]−%0, %0[
converging to zero such that
F (s0k) > L0|s0
k|p+1
p . (5.10)

5.2 Elliptic systems with oscillatory terms 159
Let w0k = s0
kw ∈ E. Due to (5.4), (5.7), (5.9) and (5.10), we have
E(w0k) =
p
p + 1‖w0
k‖p+1
p
X −∫
Ω
F (w0k)
=p
p + 1‖w‖
p+1p
X |s0k|
p+1p −
∫
B(x0,r)
F (w0k)−
∫
B(x0,R)\B(x0,r)
F (w0k)
≤ p
p + 1‖w‖
p+1p
X |s0k|
p+1p − F (s0
k)m(B(x0, r)) + `0(m(B(0, R))−m(B(0, r)))|s0k|
p+1p
≤ |s0k|
p+1p
(p
p + 1‖w‖
p+1p
X − rNωNL0 + (RN − rn)ωN`0
)
< 0 = E(0).
Since ‖w0k‖X → 0 as k →∞, 0 is not a local minimum of E, as claimed.
Proof of Theorem 5.1. Applying Theorem 1.16 with λ = pp+1 (see Lemma
5.2), we can exclude condition (A1) (see Lemma 5.3). Therefore thereexists a sequence uk ⊂ X of pairwise distinct critical points of E =
pp+1Ψ + Φ such that
limk→∞
‖uk‖X = 0. (5.11)
Thus, (uk, vk) = (uk, (−∆uk)1p ) ⊂ X ×X is a sequence of distinct
pairs of solutions to the system (S).It remains to prove (5.6). First, due to (5.2) and (5.11), we have that
limk→∞ ‖uk‖∞ = 0. For every k ∈ N let mk ∈ [−‖uk‖∞, ‖uk‖∞] =: Jk
such that |f(mk)| = maxs∈Jk|f(s)|. Note that diamJk → 0 as k → ∞;
thus limk→∞mk = 0 which implies that limk→∞ f(mk) = 0. On theother hand, from the second equation of system (S) we have that
‖vk‖p+1
p
X =∫
Ω
|∆vk|p+1
p dx =∫
Ω
|f(uk)| p+1p dx ≤ |f(mk)| p+1
p m(Ω),
which implies that limk→∞ ‖vk‖X = 0. Using again (5.2) we have thatlimk→∞ ‖vk‖∞ = 0.
In the sequel, we state a perfect counterpart of Theorem 5.1 when thenonlinearity f has an oscillation at infinity. We assume that:
(H1∞) −∞ < lim inf |s|→∞
F (s)
|s|p+1
p
≤ lim sup|s|→∞F (s)
|s|p+1
p
= +∞,
(H2∞) there exist two sequences ak and bk in ]0,∞[ with ak < bk <
ak+1 and limk→∞ bk = ∞ such that
sgn(s)f(s) ≤ 0 for every |s| ∈ [ak, bk], and

160 Systems with Arbitrary Growth Nonlinearities
(H3∞) limk→∞ ak
bk= 0 and limk→∞
max[−ak,ak] F
bp+1
pk
= 0.
Remark 5.2 Assumptions (H1∞)−(H2
∞) imply an oscillatory behaviourof f at infinity. A concrete example is described in the sequel whenhypotheses (H1
∞) − (H3∞) are fulfilled. Let ak = kkk
and bk = kkk+1
(k ≥ 2) and a1 = 5, b1 = 10. Clearly, one has ak < bk < ak+1,limk→∞ ak/bk = 0, and limk→∞ bk = ∞. Let f : R→ R be defined by
f(s) =
ϕk
(s−bk
ak+1−bk
), s ∈ [bk, ak+1], k ≥ 1;
0, s ∈]ak, bk[, k ≥ 1;g(s), s ∈ [−5, 5];0, s ∈]−∞,−5[,
where g : [−5, 5] → R is any continuous function with g(±5) = 0, andϕk : [0, 1] → [0,∞[ is a sequence of continuous functions such thatϕk(0) = ϕk(1) = 0 and there are some constants c1, c2 > 0 such that
c1(b3p+13p
k+1 −b3p+13p
k )(ak+1−bk)−1 ≤∫ 1
0
ϕk(s)ds ≤ c2(b2p+12p
k+1 −b2p+12p
k )(ak+1−bk)−1.
Note that F (s) = 0 for every s ∈]−∞,−5] and F is non-decreasing on[5,∞[. Moreover, for k ∈ N large enough we have
c1(b3p+13p
k −103p+13p )+
∫ 5
0
g(s)ds ≤ F (ak) = max[−ak,ak]
F ≤ c2(b2p+12p
k −102p+12p )+
∫ 5
0
g(s)ds.
Now, an easy computation shows the hypotheses from above are verified.
Theorem 5.2 Assume that (5.1) holds and f ∈ C(R,R) fulfills (H1∞)−
(H3∞). Then, system (S) possesses a sequence (uk, vk) ⊂ X × X of
distinct (strong) solutions which satisfy
limk→∞
‖uk‖X = limk→∞
‖vk‖X = limk→∞
‖uk‖∞ = limk→∞
‖vk‖∞ = ∞. (5.12)
The proof of Theorem 5.2 is similar to that of Theorem 5.1. Let akand bk be from Theorem 5.2 and γ = lim infs→+∞ ϕ(s) from (1.25)where ϕ comes from (5.5).
Lemma 5.4 γ = 0.

5.2 Elliptic systems with oscillatory terms 161
Proof It is clear that γ ≥ 0. Suppose that γ > 0. Due to the left-handside of (H1
∞), one can find two positive numbers `∞ and %∞ such that
F (s) > −`∞|s|p+1
p for every |s| > %∞. (5.13)
Let sk, sk be as in Lemma 5.1. By the fact that limk→∞ bk = ∞,hypothesis (H3
∞) and condition limk→∞ sk
bk= 0 (−ak ≤ sk ≤ ak), there
exists k0 ∈ N such that for every k > k0 we have
m(Ω)max[−%∞,%∞] |F |+ F (sk)
bp+1
p
k
+(
γ
2‖w‖
p+1p
X + m(Ω)`∞
)( |sk|bk
) p+1p
<γ
2κp+1
p
0
.
(5.14)Let wk = skw ∈ X, where w is defined in (5.3). A similar estimation asin Lemma 5.2 gives throughout relations (5.13) and (5.14) that
sup‖v‖p+1
X≤s
pk
F(v)−F(wk) = sup
‖v‖p+1
pX
≤sk
∫
Ω
F (v)dx−∫
Ω
F (wk)dx
= sup
‖v‖p+1
pX
≤sk
∫
Ω
F (v)dx−∫
|wk(x)|>%∞F (wk)dx
−∫
|wk(x)|≤%∞F (wk)dx
≤ m(Ω)F (sk) + m(Ω)`∞|sk|p+1
p + m(Ω) max[−%∞,%∞]
|F |
<γ
2(sk − ‖wk‖
p+1p
X ).
Since sk → +∞,
γ ≤ lim infk→∞
ϕ(sk) ≤ lim infk→∞
sup‖v‖p+1X ≤sp
kF(v)−F(wk)
sk − ‖wk‖p+1
p
X
≤ γ
2,
which contradicts γ > 0.
Lemma 5.5 E = pp+1Ψ + Φ is not bounded from below on X.
Proof Let `∞ and %∞ from the proof of Lemma 5.4, and let L∞ > 0 besuch that
rNωNL∞ − p
p + 1‖w‖
p+1p
X − (RN − rn)ωN`∞ > 0, (5.15)
where r and R are from the definition of the function w, see (5.3). By thesecond part of (H1
∞) we deduce the existence of a sequence s∞k ⊂ R

162 Systems with Arbitrary Growth Nonlinearities
with limk→∞ |s∞k | = ∞ and
F (s∞k ) > L∞|s∞k |p+1
p . (5.16)
Let w∞k = s∞k w ∈ X. We clearly have that
E(w∞k ) =p
p + 1‖w‖
p+1p
X |s∞k |p+1
p −F (s∞k )ωNrN−∫
B(x0,R)\B(x0,r)
F (w∞k ).
For abbreviation, we choose the set D = B(x0, R) \ B(x0, r). Then, onaccount of (5.13) we have∫
D
F (w∞k ) =∫
D∩|w∞k (x)|>%∞F (w∞k ) +
∫
D∩|w∞k (x)|≤%∞F (w∞k )
≥ −`∞
∫
D∩|w∞k (x)|>%∞|w∞k |
p+1p − (Rn − rN )ωN max
[−%∞,%∞]|F |
≥ −(Rn − rN )ωN
(`∞|s∞k |
p+1p + max
[−%∞,%∞]|F |
).
Consequently, due to (5.16) and the above estimation, we have
E(w∞k ) ≤ |s∞k |p+1
p
(p
p + 1‖w‖
p+1p
X − rNωNL∞ + (RN − rn)ωN `∞
)
+(RN − rn)ωN max[−%∞,%∞]
|F |.
Since limk→∞ |s∞k | = ∞, due to (5.15), we have limk→∞E(w∞k ) = −∞;consequently, infX E = −∞.
Proof of Theorem 5.2. In Theorem 1.16 we may choose λ = pp+1 (see
Lemma 5.4). On account of Lemma 5.5 the alternative (B1) can beexcluded. Therefore, there exists a sequence uk ⊂ X of distinct criticalpoints of E = p
p+1Ψ + Φ such that
limk→∞
‖uk‖X = ∞. (5.17)
Thus, (uk, vk) = (uk, (−∆uk)1p ) ⊂ X ×X is a sequence of distinct
pairs of solutions to the system (S).We now prove the rest of (5.12). Assume that for every k ∈ N we have
‖vk‖∞ ≤ M for some M > 0. In particular, from the first equation ofsystem (S) we obtain that
‖uk‖p+1
p
X =∫
Ω
|∆uk|p+1
p dx =∫
Ω
|vk|p+1dx ≤ Mp+1m(Ω),
which contradicts relation (5.17). Consequently, limk→∞ ‖vk‖∞ = ∞.But, this fact and (5.2) give at once that limk→∞ ‖vk‖X = ∞ as well.

5.3 Elliptic systems with mountain pass geometry 163
Assume finally that for every k ∈ N we have ‖uk‖∞ ≤ M ′ for someM ′ > 0. The second equation of system (S) shows that
‖vk‖p+1
p
X =∫
Ω
|∆vk|p+1
p dx =∫
Ω
|f(uk)| p+1p dx ≤ m(Ω) max
s∈[−M ′,M ′]|f(s)| p+1
p ,
which contradicts the fact that limk→∞ ‖vk‖X = ∞. The proof is com-plete.
5.3 Elliptic systems with mountain pass geometry
Similarly to the previous section, we consider again the system−∆u = vp in Ω;−∆v = f(u) in Ω;u = v = 0 on ∂Ω,
(S)
where Ω is a smooth bounded domain in RN . Let f : R → R be a
continuous function and F (s) =∫ s
0
f(t)dt. We assume that
(H1) there exist constants θ > 1 +1p
and s0 ≥ 0 such that
0 < θF (s) ≤ f(s)s for all |s| ≥ s0;
(H2) f(s) = o(s1p ) for s → 0.
Remark 5.3 Note that hypothesis (H1) is a sort of Ambrosetti-Rabi-nowitz condition, see [7]. In particular, (H1) implies that at infinity, |f |grows faster than s 7→ |s| 1p .
Let S = u ∈ X : ‖u‖X = 1. For any v ∈ S, we consider in λ ∈ Rthe algebraic equation
|λ| p+1p −
∫
Ω
f(λv)λvdx = 0. (5.18)
Remark 5.4 Let f(s) = sq with pq 6= 1. A direct calculation implies
that (5.18) has exactly two solutions λ±(v) = ±(∫
Ω
|v|q+1
)t
, where
t =(
1p− q
)−1
. Moreover, λ±(v) ∈ C1(S).
In view of this remark, for the general case, it is natural to assume that

164 Systems with Arbitrary Growth Nonlinearities
(HS) there are selections λ±(v) ∈ C1(S) among the solutions of (5.18).
The main result of this section reads as follows.
Theorem 5.3 Assume that (5.1) holds and f ∈ C(R,R) fulfills (H1),(H2) and (HS). Then, system (S) possesses a nontrivial solution. If f
is odd, then (S) has infinitely many pairs of solutions.
To prove Theorem 5.3, we first show that (H1) and (H2) imply thatfor every v ∈ S, equation (5.18) has at least two opposite sign solutionsλ−(v) < 0 < λ+(v) as we anticipated in Remark 5.4 for the particularcase f(s) = sq with pq 6= 1.
We associate with E a functional E defined on R×X by
E(λ, v) = E(λv) =p
p + 1|λ| p+1
p
∫
Ω
|∆v| p+1p dx−
∫
Ω
F (λv)dx.
Clearly, the restriction of E to R× S, still denoted by E, becomes
E(λ, v) =p
p + 1|λ| p+1
p −∫
Ω
F (λv)dx.
On account of Theorem 1.28, one can prove that if (λ, v) ∈ (R\0)×S
is a conditionally critical point of the functional E on R × S then thevector u = λv is a nonzero critical point of the functional E, that is,E′(u) = 0. In particular, the conditionally critical point of the functionalE implies that E′
λ(λ, v) = 0, which takes the form
|λ| p+1p −2λ−
∫
Ω
f(λv)vdx = 0
or equivalently, for λ 6= 0,
|λ| p+1p −
∫
Ω
f(λv)λvdx = 0. (5.19)
Setting
ϕv(λ) = 1− |λ|− p+1p
∫
Ω
f(λv)λvdx,
the following lemma holds.
Lemma 5.6 Assume that (5.1) holds and f ∈ C(R,R) fulfills (H1),(H2). Then, for all v ∈ S
(i) limλ→0
ϕv(λ) = 1,

5.3 Elliptic systems with mountain pass geometry 165
(ii) lim|λ|→+∞
ϕv(λ) = −∞.
Proof Fix v ∈ S arbitrarily.(i) By relation (5.2), v is a nontrivial bounded continuous function.
Thus, there exists M > 0 such that |v(x)| ≤ M for all x ∈ Ω. Now,by hypothesis (H2), for any ε > 0 there exists δ > 0 such that |s| ≤ δ
implies|f(s)||s| 1p
< ε. Fixing λ small enough, |λ| < δ
M, it follows that
|f(λv(x))| < ε|λv(x)| 1p for any x ∈ Ω,
hence
limλ→0
|λ|− p+1p
∫
Ω
f(λv)λvdx = 0.
Consequently,
limλ→0
ϕv(λ) = 1− limλ→0
|λ|− p+1p
∫
Ω
f(λv)λvdx = 1,
i.e., (i) holds.(ii) One can write that
|λ|− p+1p
∫
Ω
f(λv)λvdx = |λ|− p+1p
∫
Ω−λ
f(λv)λvdx +∫
Ω+λ
f(λv)λvdx
,
(5.20)where Ω−λ = x ∈ Ω : |λv(x)| < s0 and Ω+
λ = x ∈ Ω : |λv(x)| ≥ s0,s0 being the positive constant from (H1). Clearly, the boundedness off(λv)λv on Ω−λ implies that
lim|λ|→+∞
|λ|− p+1p
∫
Ω−λ
f(λv)λvdx = 0 (5.21)
while by (H1) it follows that
|λ|− p+1p
∫
Ω+λ
f(λv)λvdx ≥ θ|λ|− p+1p
∫
Ω+λ
F (λv)dx
≥ c1θ|λ|−p+1
p
∫
Ω+λ
|λv|θdx.
Denoted by λ∗ a real positive number such that Ω+λ∗ 6= ∅. For |λ| ≥ λ∗

166 Systems with Arbitrary Growth Nonlinearities
it follows that Ω+λ∗ ⊂ Ω+
λ . Thus, one can fix a positive constant c2 > 0such that for |λ| ≥ λ∗ we have
|λ|− p+1p
∫
Ω+λ
f(λv)λvdx ≥ c1θ|λ|θ−p+1
p
∫
Ω+λ∗|v|θdx ≥ c2|λ|θ−
p+1p .
As θ >p + 1
p, we conclude that
lim|λ|→+∞
|λ|− p+1p
∫
Ω+λ
f(λv)λvdx = +∞. (5.22)
Consequently,
lim|λ|→+∞
ϕv(λ) = 1− lim|λ|→+∞
|λ|− p+1p
∫
Ω
f(λv)λvdx = −∞,
i.e., (ii) holds.
Lemma 5.6 implies that equation ϕv(λ) = 0 has at least two nontrivialopposite sign solutions for any v ∈ S. By regularity assumption (HS)there exist two selections λ±(v) which are of class C1 on S. Then, thefunctional E± : S → R defined by E±(v) = E(λ±(v), v) is of class C1
and on account of (5.19), it becomes
E±(v) =p
p + 1
∫
Ω
f(λ±(v)v)λ±(v)vdx−∫
Ω
F (λ±(v)v)dx.
Proposition 5.1 Each critical point v ∈ S of E± provides a condition-ally critical point (λ±(v), v) ∈ (R\0)×S of E. In particular, for a min-imum point v ∈ S of E± relative to S, the point (λ±(v), v) ∈ (R\0)×S
is a conditionally critical point of E.
Proof First of all, we notice that ϕv(λ±(v)) = 0; therefore, E′λ(λ±(v), v) =
0. On the other hand, by assumption, we have that
0 ∈ E′±(v) + NS(v). (5.23)
Therefore, a simple calculation shows that −E′v(λ±(v), v) ∈ NS(v). Con-
sequently, we have that
−E′(λ±(v), v) ∈ 0 ×NS(v) = N(R\0)×S(λ±(v), v),
i.e., (λ±(v), v) ∈ (R \ 0) × S is a conditionally critical point of thefunctional E.

5.3 Elliptic systems with mountain pass geometry 167
Now, let v ∈ S be a relative minimum of E± to S. In particular, thisfact implies that
〈E′±(v), w〉 = 0 for all w ∈ Tv(S). (5.24)
Here, 〈·, ·〉 denotes the duality pairing between X and X∗. Note thatrelation (5.24) is nothing but relation (5.23), see Appendix A.
In view of Theorem 1.28 and Proposition 5.1, it is enough to findcritical points of E± on S. In the sequel, we deal only with the functionalE+; analogously, it is possible to consider the functional E−.
Due to (H1), the functional E+ is bounded from below. Indeed, ifΩ+
λ+and Ω−λ+
are defined as in Lemma 5.6, by (H1), there exists a realconstant M such that
E+(v) =∫
Ω
(p
p + 1f(λ+(v)v)λ+(v)v − F (λ+(v)v)
)dx
=∫
Ω−λ+
(p
p + 1f(λ+(v)v)λ+(v)v − F (λ+(v)v)
)dx
+∫
Ω+λ+
(p
p + 1f(λ+(v)v)λ+(v)v − F (λ+(v)v)
)dx
≥ M +(
p
p + 1θ − 1
) ∫
Ω+λ+
F (λ+(v)v)dx ≥ M.
Lemma 5.7 Assume that (5.1) holds and f ∈ C(R,R) fulfills (H1), (H2)and (HS). If vk ⊂ S is such that the sequence E+(vk) is boundedfrom above, then the sequence λ+(vk) is contained in a compact inter-val [c, C] for some c, C > 0.
Proof Let vk ⊂ S be such that E+(vk) is bounded from above. By(5.2), up to subsequence,
vk v weakly in X and uniformly in Ω. (5.25)
For simplicity, denote by λk the sequence λ+(vk).We first assume by contradiction that, up to subsequence, λk → 0.
By (5.25), λkvk → 0 uniformly in Ω. Arguing as in the proof of (i) ofLemma 5.6, by (H2) it follows that
limk→∞
λ− p+1
p
k
∫
Ω
f(λkvk)λkvkdx = 0,

168 Systems with Arbitrary Growth Nonlinearities
hence, by (5.19) we easily obtain the contradiction, i.e., there existsc > 0 such that λk ≥ c for every k ∈ N.
Now, we assume by contradiction, passing to a subsequence if neces-sarily, that λk → +∞ . We introduce the sets
Ω−k = x ∈ Ω : |λkvk(x)| < s0 and Ω+k = x ∈ Ω : |λkvk(x)| ≥ s0.
By (5.19), for any k ∈ N, we have that
λ− p+1
p
k
∫
Ω−k
f(λkvk)λkvkdx + λ− p+1
p
k
∫
Ω+k
f(λkvk)λkvkdx = 1. (5.26)
Since the sequence λkvk is uniformly bounded on the set Ω−k , we have
limk→∞
λ− p+1
p
k
∫
Ω−k
f(λkvk)λkvkdx = 0 (5.27)
and ∫
Ω−k
F (λkvk)dx
is bounded. (5.28)
In particular, by (5.26) and (5.27) it follows that
limk→∞
λ− p+1
p
k
∫
Ω+k
f(λkvk)λkvkdx = 1.
Due to (H1), we have∫
Ω+k
f(λkvk)λkvkdx ≥ θ
∫
Ω+k
F (λkvk)dx.
Consequently, passing to a subsequence if necessarily, we have that
limk→∞
λ− p+1
p
k
∫
Ω+k
F (λkvk)dx = l, 0 ≤ l ≤ 1θ. (5.29)
On the other hand, we may observe that
E+(vk) = λp+1
p
k
(p
p + 1− λ
− p+1p
k
∫
Ω+k
F (λkvk)dx
)−
∫
Ω−λk
F (λkvk)dx.
Therefore, by θ >p + 1
p, (5.28) and (5.29) we obtain that lim
k→∞E+(vk) =
+∞ which contradicts the boundedness of the sequence E+(vk).
Proposition 5.2 Assume that (5.1) holds and f ∈ C(R,R) fulfills (H1),(H2) and (HS). Then E± attains its infimum on S.

5.3 Elliptic systems with mountain pass geometry 169
Proof We prove the statement only for E+; in a similar way, we canprove that also the functional E− attains its infimum on S.
Let vk ⊂ S be a sequence such that E+(vk) → m+ = infS E+.
There exists v+ ∈ X \ 0 with the property ‖v+‖X ≤ 1 such that, upto a subsequence, (5.25) holds. Due to Lemma 5.7 the correspondingsequence λ+(vk) converges, up to subsequence, to a real number λ+ >
0. By using (5.25) and passing to the limit in (5.19), the pair (λ+, v+)still solves (5.19). Thus, λ+ = λ+(v+) with v+ 6= 0. In conclusion, wehave that λ+(vk) → λ+(v+). Moreover, by (5.25), we conclude that
E+(vk) → E+(v+) = m+.
It remains to prove that ‖v+‖X = 1. To see this, we argue by contradic-tion, i.e., we assume that ‖v+‖X < 1. For any t > 0, by using relation(5.19), we deduce that
d
dtE+(tv+) =
d
dt
[p
p + 1(λ+(tv+))
p+1p −
∫
Ω
F (λ+(tv+)tv+)dx
]
=[(λ+(tv+))
1p −
∫
Ω
f(λ+(tv+)tv+)tv+dx
]
× d
dtλ+(tv+)v+ −
∫
Ω
f(λ+(tv+)tv+)λ+(tv+)v+dx
= −1t(λ+(tv+))
p+1p < 0.
Therefore, the function t 7→ E+(tv+) is decreasing with respect to t,t > 0. Now, let t0 > 1 such that t0‖v+‖X = 1. Then t0v+ ∈ S, butE+(t0v+) < E+(v+) = m+ = infS E+, contradiction.
Proof of Theorem 5.3. On account of Propositions 5.1, 5.2 and Theo-rem 1.28, we conclude that u+ = λ+(v+)v+ and u− = λ−(v−)v− are twonontrivial critical points of E, thus, they correspond to two nontrivialpairs of solutions of system (S). Note that these pairs of solutions maycoincide.
If f is odd, we necessarily have λ+(v+) = −λ−(v−) and E := E+ =E−. Moreover, v+ = v−; consequently, u+ and u− = −u+ providetwo opposite sign pairs of solutions to system (S). Moreover, E is even,bounded from below, of class C1 and it satisfies the (PS)-condition onS. Then, applying Theorem 1.10 with M = S, together with ExampleC.2, we conclude that E has infinitely many critical points vk ⊂ S
with limk→∞ E(vk) = supS E = +∞. On account of the first part ofProposition 5.1, there exists a sequence of different conditionally critical

170 Systems with Arbitrary Growth Nonlinearities
points of E. In view of Theorem 1.28, E has a sequence of geometricallydifferent critical points ±u1,±u2, . . . ,±uk, . . . with uk(x) = λ(vk)vk
such that E(uk) → +∞. This concludes the proof.
5.4 Comments and perspectives
1. We assume (5.1) holds and consider the perturbed system−∆u = vp in Ω;−∆v = f(u) + εg(u) in Ω;u = v = 0 on ∂Ω,
(Sε)
where g : R → R is any continuous function with g(0) = 0. We predictthat for every n ∈ N there exists εn > 0 such that for every ε ∈ [−εn, εn],system (Sε) has at least n distinct pairs of solutions whenever f : R→ Rverifies the set of assumptions from Theorems 5.1 or 5.2. This statementis not unexpected taking into account the recent papers of Anello andCordaro [12] and Kristaly [168] where a prescribed number of solutionswere guaranteed for certain elliptic problems of scalar type wheneverthe parameter in the front of the perturbation is small enough. In bothpapers (i.e., [12] and [168]) the uniform Lipschitz truncation functionha : R→ R (a > 0), ha(s) = min(a,max(s, 0)) plays a key role, fulfillingas well the so-called Markovian property concerning the superpositionoperators: for any u ∈ W 1,r
0 (Ω) one also has ha u ∈ W 1,r0 (Ω), where
r > 1. Note however that a similar property is not available any longerreplacing the space W 1,r
0 (Ω) by a higher order Sobolev space W 2,r(Ω);in particular, the Markovian property is not valid for X = W 2, p+1
p (Ω)∩W
1, p+1p
0 (Ω).2. Based on (5.1), the embedding X ⊂⊂ C(Ω) is essential in our
investigations, see the proof of Lemmas 5.2 and 5.4. Is it possible toobtain similar conclusions as in Theorems 5.1 and 5.2 by omitting (5.1)and considering the whole region below the critical hyperbola?

6
Scalar Field Equations with OscillatoryTerms
The mathematics aredistinguished by a particularprivilege, that is, in the courseof ages, they may alwaysadvance and can never recede.
Edward Gibbon (1737–1794),Decline and Fall of the Roman
Empire
In this chapter we study the existence of multiple solutions for twoclasses of quasilinear problems: a double eigenvalue problem for a scalarfield equation and a scalar field system with generalized boundary con-ditions. The nonlinear boundary conditions studied here recover thestandard Dirichlet, Neumann, or periodic boundary conditions.
6.1 Introduction
Let hp : Rn → Rn be the homeomorphism defined by hp(x) = |x|p−2x
for all x ∈ RN , where p > 1 is fixed. Let | · | denote the Euclidean normin RN . For T > 0, let F : [0, T ]×RN → R be a Caratheodory mappingsatisfying:
(F1) for a.e. t ∈ [0, T ], the function F (t, ·) is continuously differentiable;(F2) the mapping F (·, x) : [0, T ] → R is measurable for each x ∈ Rn,F (·, 0) ∈ L1(0, T ), and for each M > 0 there exists αM ∈ L1(0, T ) suchthat for all x ∈ Rn with |x| < M ,
|∇F (t, x)| ≤ αM (t) for a.e. t ∈ [0, T ];
Let j : Rn × Rn →] − ∞,+∞] be a function having the followingproperties:
171

172 Scalar Field Equations with Oscillatory Terms
(J1) D(j) = (x, y) ∈ Rn × Rn : j(x, y) < +∞ 6= ∅ is a closed convexcone with D(j) 6= (0, 0);(J2) j is a convex and lower semi-continuous (shortly, l.s.c.) function.
The first problem studied in this chapter is the following.Let γ > 0 be arbitrary. For λ, µ > 0 we consider the following double
eigenvalue problem involving the p-Laplace operator:
(Pλ,µ)
−[hp(u′)]′ + γhp(u) = λ∇F (t, u) a.e. t ∈ [0, T ],
(hp(u′)(0),−hp(u′)(T )
)∈ µ∂j(u(0), u(T )),
where u : [0, T ] → Rn is of class C1 and hp(u′) is absolutely continuous.Note, that ∇F (t, η) denotes the gradient of F (t, ·) at η ∈ Rn, while ∂j
denotes the subdifferential of j in the sense of convex analysis.Next, we assume that:
(C1) F : Rn → R is of class C1,(C2) S ⊂ Rn × Rn is a closed convex set wit (x, x) : x ∈ Rn ⊂ S,
(C3) γ1, . . . , γn ∈ L∞(]0, T [,R) are so that essinf γi > 0, for i = 1, n
and put γ = (γ1, . . . , γn),(C4) α ∈ L1(]0, T [,R) is so that α(t) ≥ 0 a.e. in ]0, T [.
The second problem studied in this chapter is the following:
(S)
−[hp(u′)]′ + γ hp(u) = α(t)∇F (u)
(hp(u′)(0),−hp(u′)(T )) ∈ NS(u(0), u(T )),
where NS(x, y) denotes the normal cone of S at (x, y) ∈ S.
6.2 Multiple solutions of a double eigenvalue problem
In this section we prove a multiplicity result for the problem (Pλ,µ). Forthis purpose we suppose that the following conditions are fulfilled:
(F3) lim|x|→∞
F (t, x)− F (t, 0)|x|p ≤ 0 uniformly for a.e. t ∈ [0, T ].
(F4) lim|x|→0
F (t, x)− F (t, 0)|x|p ≤ 0 uniformly for a.e. t ∈ [0, T ];
(F5) there exists s0 ∈ RN such that
T∫
0
(F (t, s0)− F (t, 0)
)dt > 0.

6.2 Multiple solutions of a double eigenvalue problem 173
(J3) j(0, 0) = 0, j(x, y) ≥ 0 for all (x, y) ∈ Rn × Rn.
We consider the Sobolev space W 1,p = W 1,p(0, T ;Rn) equipped withthe norm
‖u‖η =(‖u′‖p
Lp + η‖u‖pLp
)1/p
,
where η > 0, and denote by ‖ · ‖Lp the norm of Lp = Lp(0, T ;Rn), thatis,
‖u‖Lp =
T∫
0
|u(t)|pdt
1/p
.
We consider the space of continuous functions C = C([0, T ];Rn) en-dowed with the norm
‖u‖C = max|u(t)| : t ∈ [0, T ].For γ > 0, we consider ϕγ : W 1,p → R defined by
ϕγ(u) :=1p
(‖u′‖p
Lp + γ‖u‖pLp
)for all u ∈ W 1,p.
Note that ϕγ is convex, ϕγ ∈ C1(W 1,p;R) and for all u, v ∈ W 1,p,
〈ϕ′γ(u), v〉 =
T∫
0
(hp(u′), v′)dt + γ
T∫
0
(hp(u), v)dt , (6.1)
where (·, ·) denotes the usual inner product in Rn.We define the function J : W 1,p →]−∞, +∞] by
J(u) = j(u(0), u(T )) for all u ∈ W 1,p.
Then J is a proper, convex and l.s.c. function. We also observe that
D(J) = u ∈ W 1,p : (u(0), u(T )) ∈ D(j).We consider the functional F : C → R defined by
F(v) = −T∫
0
F (t, v)dt +
T∫
0
F (t, 0)dt for all v ∈ C
and F : W 1,p → R defined by F = F∣∣∣W 1,p
. The functional F is sequen-
tially weakly continuous, since the embedding W 1,p → C is compact.

174 Scalar Field Equations with Oscillatory Terms
We also have for all u, v ∈ W 1,p,
〈F ′(u), v〉 = −T∫
0
(∇F (t, u), v)dt . (6.2)
Note that for 1 ≤ r < p and p < q < p∗ the embeddings Lp →Lr,W 1,p → Lq, W 1,p → C are continuous, hence there exist constantsCr,p, Cq,p, c > 0 such that
‖u‖Lr ≤ Cr,p‖u‖Lp , ‖u‖Lq ≤ Cq,p‖u‖W 1,p , ‖u‖C ≤ c‖u‖W 1,p
for all u ∈ W 1,p.The energy functional I : [0,∞)×[0,∞)×W 1,p →]−∞,∞] associated
to the problem (Pλ,µ) is defined by
I(λ, µ, u) = ϕγ(u) + λF(u) + µJ(u).
The functional I is of Szulkin type and J ′ denote the derivative in thesense of Definition A.4.
The following result is due to Jebelean and Morosanu [148], Proposi-tion 3.2.
Proposition 6.1 Assume that F : [0, T ] × Rn → R satisfies (F1) and(F2) and j : Rn ×Rn →]−∞, +∞] satisfies (J1) and (J2). If u ∈ W 1,p
is a critical point of I(λ, µ, ·), then u is a solution of (Pλ,µ).
Proof Assume that u ∈ W 1,p is a critical point of I(λ, µ, ·). Then, forall v ∈ W 1,p,
λ〈F ′(u), v − u〉+ ϕγ(v)− ϕγ(u) + µ(J(v)− J(u)
)≥ 0 .
Let w ∈ W 1,p and set v = u + sw, where s > 0. Dividing by s and thenletting s → 0+, we obtain for all w ∈ W 1,p,
λ〈F ′(u), w〉+ 〈ϕ′γ(u), w〉+ µJ ′(u;w) ≥ 0 ,
where J ′(u;w) means the derivative in the sense of Definition A.4.By the definition of J we deduce that for every w ∈ W 1,p,
λ〈F ′(u), w〉+ 〈ϕ′γ(u), w〉+ µj′((u(0), u(T )); (w(0), w(T ))) ≥ 0 . (6.3)
Since C∞0 (0, T ;Rn) ⊂ W 1,p, it follows that for all w ∈ C∞0 (0, T ;Rn),
λ〈F ′(u), w〉+ 〈ϕ′γ(u), w〉 = 0 .

6.2 Multiple solutions of a double eigenvalue problem 175
Combining relations (6.1) and (6.2) we have for all w ∈ C∞0 (0, T ;Rn),
T∫
0
(hp(u′), w′)dt =
T∫
0
(−γhp(u) +∇F (t, u), w)dt . (6.4)
For any u ∈ W 1,p, we obtain
hp(u), hp(u′) ∈ Lp′(0, T ;Rn) with1p
+1p′
= 1. (6.5)
But ∇F (·, u) ∈ L1(0, T ) (by (F2)), hence relations (6.4) and (6.5) yieldhp(u′) ∈ W 1,1 and
−(hp(u′)
)′= −γhp(u) +∇F (t, u) for a.e. t ∈ [0, T ]. (6.6)
Since hp is a homeomorphism and hp(u′) ∈ W 1,1, it follows that u is ofclass C1.
In order to show that u satisfies the boundary condition of problem(Pλ,µ) we note that by (6.3) and (6.6) we have for all w ∈ W 1,p,
µj′((u(0), u(T )); (w(0), w(T ))) ≥ (hp(u′)(0), w(0))− (hp(u′)(T ), w(T )) .
Therefore
µj′((u(0), u(T )); (x, y)) ≥ (hp(u′)(0), w(0))− (hp(u′)(T ), w(T )) .
From Lemma A.2 it follows that(hp(u′)(0),−hp(u′)(T )
)∈ µ∂j(u(0), u(T )).
We conclude that u is a solution of problem (Pλ,µ).
We introduce the constant η1 = η1(p, γ) > 0 by setting
η1 = inf‖u′‖p
Lp + γ‖u‖pLp
‖u‖pLp
: u ∈ W 1,p \ 0, u ∈ D(J)
.
Since η1 > 0, we obtain
2−1/p‖u‖η1 ≤ (‖u′‖pLp + γ‖u‖p
Lp)1/p ≤ ‖u‖η1 for all u ∈ D(J). (6.7)
Lemma 6.1 [148, Lemma 4.3] Assume that un ⊂ D(J) such thatun u weakly in W 1,p and
lim infn→∞
(〈ϕ′γ(un), u− un〉+ µJ ′(un; u− un)
)≥ 0 . (6.8)
Then un has a subsequence which converges strongly in W 1,p.

176 Scalar Field Equations with Oscillatory Terms
Proof Note that u ∈ D(J), since the closed convex set D(J) is weaklyclosed in (W 1,p, ‖ · ‖η1). Hence, J ′(un; u − un) < ∞ for all n ∈ N.Combining relation (6.8) and the lower semi-continuity of J , we have
lim supn→∞
〈ϕ′γ(un), un − u〉 ≤− lim inf
n→∞
(〈ϕ′γ(un), u− un〉+ µJ ′(un; u− un)
)
+µ lim supn→∞
J ′(un; u− un)
≤ µ lim supn→∞
(J(u)− J(un)) = µ(J(u)− lim infn→∞
J(un)) ≤ 0.
Hence,
lim supn→∞
〈ϕ′γ(un), un − u〉 ≤ 0. (6.9)
From the expression (6.1) of ϕ′γ we have
〈ϕ′η1(un), un − u〉 = 〈ϕ′γ(un), un − u〉
+(η1 − γ)
T∫
0
(hp(un), un − u)dt .(6.10)
Taking into account that un u weakly in W 1,p and that the embeddingW 1,p → C is compact, we obtain for a subsequence of un (denotedagain by un) that
limn→∞
T∫
0
(hp(un), un − u)dt = 0. (6.11)
Then, by relations (6.9), (6.10) and (6.11) we have
lim supn→∞
〈ϕ′η1(un), un − u〉 ≤ 0. (6.12)
On the other hand, for each positive integer n,
0 ≤ (‖un‖p−1η1
− ‖u‖p−1η1
)(‖un‖η1 − ‖u‖η1). (6.13)
Using Holder’s inequality, we obtain
(‖un‖p−1η1
− ‖u‖p−1η1
)(‖un‖η1 − ‖u‖η1) ≤ 〈ϕ′η1(un)− ϕ′η1
(u), un − u〉.Thus, by relation (6.13) we deduce that
limn→∞
‖un‖η1 = ‖u‖η1 .
Since (W 1,p, ‖ · ‖η1) is uniformly convex, it follows that un convergesstrongly to u.

6.2 Multiple solutions of a double eigenvalue problem 177
Remark 6.1 Let ε > 0 be arbitrary. From (F1), (F2) and (F3) it followsthat there exists δ1 > 0 (depending on ε) such that
F (t, x)− F (t, 0) ≤ ε|x|p + αδ1(t)δ1 for all x ∈ Rn, a.e. t ∈ [0, T ].
Then
F(u) ≥ −ε‖u‖pLp − δ1‖αδ1‖L1(0,T ) for all u ∈ W 1,p. (6.14)
Proposition 6.2 Assume that F : [0, T ]× Rn → R satisfies (F1), (F2)and (F3) and that j : Rn × Rn →] − ∞, +∞] satisfies (J1) and (J2).Then the following properties hold:
(1) I(λ, µ, ·) is weakly sequentially lower semi-continuous on W 1,p
for each λ > 0, µ ≥ 0;(2) lim
‖u‖η1→+∞I(λ, µ, u) = +∞ for each λ > 0, µ ≥ 0;
(3) E(λ, µ, ·) satisfies the (PS) condition for each λ, µ > 0.
Proof (1) The function I(λ, µ, ·) is weakly sequentially l.s.c on W 1,p,because F is weakly sequentially l.s.c., while ϕγ and J are convex andl.s.c., hence they are also weakly sequentially l.s.c.
(2) We first observe that
‖u‖pLp ≤ 1
η1‖u‖p
η1for all u ∈ W 1,p.
In (6.14) we choose ε < η12λp . Since the embedding Lp → L1 is continuous
and (6.7) holds, we have for all u ∈ D(J),
I(λ, µ, u) ≥ 1p
(‖u′‖p
Lp + γ‖u‖pLp
)− λε‖u‖p
Lp
− λδ1‖αδ1‖L1(0,T ) + µJ(u)
≥ η1 − 2ελp
2η1p‖u‖p
η1− λδ1‖αδ1‖L1(0,T ) + µJ(u).
Since J is convex and l.s.c., it is bounded from below by an affine func-tional and then there exist constants c1, c2, c3 > 0 such that for allu ∈ D(J),
I(λ, µ, u) ≥ η1 − 2ελp
2η1p‖u‖p
η1− λδ1‖αδ1‖L1(0,T ) − c1|u(0)| − c2|u(T )| − c3.
By the continuity of the embedding W 1,p → C we have for all u ∈ W 1,p,
I(λ, µ, u) ≥ c4‖u‖pη1− c5‖u‖η1 − c6,

178 Scalar Field Equations with Oscillatory Terms
where c4, c5, c6 are positive constants. Since p > 1, it follows thatI(λ, µ, u) → +∞ as ‖u‖η1 → +∞.
(3) Let un in W 1,p be a sequence satisfying I(λ, µ, un) → c. Then,for all v ∈ W 1,p,
λ〈F ′(un), v−un〉+ϕγ(v)−ϕγ(un)+µJ(v)−µJ(un) ≥ −εn‖v−un‖η1 ,
where εn ⊂ [0,∞) with εn → 0. We have a subsequence un ⊂ D(J)(we just eliminate the finite number of elements of the sequence whichdo not belong to D(J)), since µ > 0 and I(λ, µ, un) → c.
But I(λ, µ, ·) is coercive, hence un is bounded in W 1,p. The em-bedding W 1,p → C is compact, then we can find a subsequence, stilldenoted by un, which is weakly convergent to a point u ∈ W 1,p andstrongly in C.
In the above inequality we take v = un + s(u− un), with s > 0, thendivide both sides of the inequality by s and let s 0. So, for all positiveinteger n
λ〈F ′(un), u−un〉+ 〈ϕ′γ(un), u−un〉+µJ ′(un; u−un) ≥ −εn‖u−un‖η1 .
By the upper semi-continuity of F ′, it follows that
lim infn→∞
(〈ϕ′γ(un), u− un〉+ µJ ′(un; u− un)
)≥ 0.
By Lemma 6.1 we deduce that un has a subsequence that convergesstrongly to u ∈ W 1,p.
Remark 6.2 From (F1), (F2), (F3) and (F4) it follows that for eachε > 0 there exist δε, δε > 0 such that
F (t, x)− F (t, 0) ≤ ε|x|p +αδε(t)δr−1ε
|x|r for all x ∈ Rn, a.e. t ∈ [0, T ],
where r ≥ 1. Then, by using the continuity of the embedding W 1,p → C,we obtain
F(u) ≥ −ε‖u‖pLp − cr‖αδε‖L1(0,T )
δr−1ε
‖u‖rγ for all u ∈ W 1,p. (6.15)
Remark 6.3 If F : [0, T ] × Rn → R satisfies (F1) and (F4), then 0 =∇F (t, 0) for a.e. t ∈ [0, T ].
The main result of this section is the following.

6.2 Multiple solutions of a double eigenvalue problem 179
Theorem 6.1 Let F : [0, T ]×Rn → R be a function satisfying (F1)−(F5)and let j : Rn × Rn →] −∞, +∞] be a function satisfying (J1) − (J3).Then for each fixed µ > 0, there exists an open interval Λµ ⊂]0,+∞[such that for each λ ∈ Λµ, the problem (Pλ,µ) has at least two nontrivialsolutions.
Proof Let µ > 0 be fixed. We define the function g :]0,+∞[→ R by
g(t) = sup −F(u) : ϕγ(u) + µJ(u) ≤ t , for all t > 0.
Using (6.15) for r ∈]p, p∗[ it follows that for all u ∈ W 1,p we have
−F(u) ≤ ε
γ‖u‖p
γ +cr‖αδε‖L1(0,T )
δr−1ε
‖u‖rγ .
Since p < r, we have
limt→0+
g(t)t
= 0.
Using (F5) we define u0(t) = s0 for a.e. t ∈ [0, T ]. Then u0 ∈ W 1,p \ 0and −F(u0) > 0. Due to the convergence relation above, it is possibleto choose a real number t0 such that 0 < t0 < ϕγ(u0) + µJ(u0) and
g(t0)t0
< [ϕγ(u0) + µJ(u0)]−1 · (−F(u0)).
We choose ρ0 > 0 such that
g(t0) < ρ0 < [ϕγ(u0) + µJ(u0)]−1 · (−F(u0))t0. (6.16)
We apply Theorem 1.22 to the space W 1,p, the interval Λ =]0,+∞[and the functions E1, E2 : W 1,p → R, h : Λ → R defined by
E1(u) = ϕγ(u), ζ1(u) = µJ(u), I2(u) = E2(u) = F(u), h(λ) = ρ0λ.
By Proposition 6.2, the assumptions (i) and (ii) of Theorem 1.22 arefulfilled.
We prove now the minimax inequality
supλ∈Λ
infu∈W 1,p
(ϕγ(u) + µJ(u) + λF(u) + ρ0λ
)<
infu∈W 1,p
supλ∈Λ
(ϕγ(u) + µJ(u) + λF(u) + ρ0λ
).
The function
λ 7→ infu∈W 1,p
(ϕγ(u) + µJ(u) + λF(u) + ρ0λ
)

180 Scalar Field Equations with Oscillatory Terms
is upper semi-continuous on Λ. Since
infu∈W 1,p
(ϕγ(u)+µJ(u)+λF(u)+ρ0λ
)≤ ϕγ(u0)+µJ(u0)+λF(u0)+ρ0λ
and ρ0 < −F(u0), it follows that
limλ→+∞
infu∈W 1,p
(ϕγ(u) + µJ(u) + λF(u) + ρ0λ
)= −∞.
Thus we can find λ ∈ Λ such that
β1 := supλ∈Λ
infu∈W 1,p
(ϕγ(u) + µJ(u) + λF(u) + ρ0λ
)
= infu∈W 1,p
(ϕγ(u) + µJ(u) + λF(u) + ρ0λ
).
In order to prove that β1 < t0, we distinguish two cases:
I. If 0 ≤ λ < t0ρ0
, we have
β1 ≤ ϕγ(0) + µJ(0) + λF(0) + ρ0λ = λρ0 < t0.
II. If λ ≥ t0ρ0
, then we use ρ0 < −F(u0) and the inequality (6.16) toget
η1 ≤ ϕγ(u0) + µJ(u0) + λF(u0) + ρ0λ
≤ ϕγ(u0) + µJ(u0) +t0ρ0
(ρ0 + F(u0)) < t0 .
From g(t0) < ρ0 it follows that for all u ∈ W 1,p with ϕγ(u)+µJ(u) ≤ t0we have −F(u) < ρ0. Hence
t0 ≤ inf ϕG(u) + µJ(u) : −F(u) ≥ ρ0 .
On the other hand,
β2 = infu∈W 1,p
supλ∈Λ
(ϕG(u) + µJ(u) + λF(u) + ρ0λ)
= inf ϕG(u) + µJ(u) : −F(u) ≥ ρ0 .
We conclude that
β1 < t0 ≤ β2.
Hence, assumption (iii) from Theorem 1.22 holds. Thus, there existsan open interval Λµ ⊆]0,∞) such that for each λ ∈ Λµ the functionϕG + µJ + λF has at least three critical points in W 1,p. By Proposition6.1 it follows that these critical points are solutions of (Pλ,µ). Since∇F (t, 0) = 0 for a.e. t ∈ [0, T ], we get that at least two of the abovesolutions are nontrivial.

6.2 Multiple solutions of a double eigenvalue problem 181
Remark 6.4 The two conditions from (J3) can be replaced by(J ′3) j(x, y) ≥ j(0, 0) for all (x, y) ∈ Rn × Rn.
Then all the proofs above can be adapted by considering
J(u) = j(u(0), u(T ))− j(0, 0).
Corollary 6.1 Let F : [0, T ]× Rn → R be a function satisfying (F1)−(F5) and let b : Rn × Rn → R be a positive, convex and Gateaux dif-ferentiable function with b(0, 0) = 0. Assume that S ⊂ Rn × Rn is anonempty closed convex cone with S 6= (0, 0), whose normal cone wedenote by NS. Then, for each fixed γ, µ > 0, there exists an open intervalΛ0 ⊂]0, +∞[ such that for each λ ∈ Λ0, the following problem(Pλ,µ)
−[hp(u′)]′ + γhp(u) = λ∂F (t, u) a.e. t ∈ [0, T ],
(u(0), u(T )) ∈ S,
(hp(u′)(0),−hp(u′)(T )
)∈ µ∇b(u(0), u(T )) + µNS(u(0), u(T )),
has at least two nontrivial solutions.
Proof The statement follows by applying Theorem 6.1 to the functionF and the convex function j : Rn × Rn →]−∞, +∞] defined by
j(x, y) = b(x, y) + IS(x, y), for all (x, y) ∈ Rn × Rn,
where
IS(x, y) =
0, if (x, y) ∈ S
+∞, if (x, y) ∈ Rn × Rn \ S,
is the indicator function of the cone S.Note, that in this case D(j) = S and j satisfies the conditions (J1)−
(J3). Moreover,
∂j(x, y) = ∇b(x, y) + ∂IS(x, y) = ∇b(x, y) + NS(x, y) for all (x, y) ∈ S.
Example 6.1 Various possible choices of b and S from Corollary 6.1recover some classical boundary conditions. For instance:
(a) b = 0 and S = (x, x) : x ∈ Rn we get periodic boundaryconditions u(0) = u(T ), u′(0) = u′(T );

182 Scalar Field Equations with Oscillatory Terms
(b) b = 0 and S = Rn × Rn we get Neumann type boundary condi-tions u′(0) = u′(T ) = 0;
(c) b(z) = 12 (Az, z)R2N , z ∈ R2N , where A is a symmetric, positive
2N × 2N real valued matrix, and S = Rn × Rn; we get thefollowing mixed boundary conditions
(hp(u′)(0)
−hp(u′)(T )
)= A
(u(0)u(T )
).
For these choices of F , b and S it follows by Corollary 6.1 that foreach fixed γ, µ > 0, there exists an open interval Λ0 ⊂]0, +∞[ such thatfor each λ ∈ Λ0 the problem (Pλ,µ) has at least two nontrivial solutions.
6.3 Scalar field systems with nonlinear oscillatory terms
To formulate the second problem we assume that:(C1) F : Rn → R is of class C1,(C2) S ⊂ Rn × Rn is a closed convex set wit (x, x) : x ∈ Rn ⊂ S,
(C3) γ1, . . . , γn ∈ L∞(]0, T [,R) are so that essinf γi > 0, for all i =1, . . . , n and put γ = (γ1, . . . , γn),(C4) α ∈ L1(]0, T [,R) is so that α(t) ≥ 0 a.e. in ]0, T [.
We study the existence and multiplicity of the solutions of the system:
(S)
−[hp(u′)]′ + γ hp(u) = α(t)∇F (u)
(hp(u′)(0),−hp(u′)(T )) ∈ NS(u(0), u(T )),
where NS(x, y) denotes the normal cone of S at (x, y) ∈ S.The first step in the study of (S) is to establish the corresponding
energy function. For this some preparation is needed:
• For every i ∈ 1, . . . , n denote by Xi the Sobolev space W 1,p( ]0, T [ ,R)equipped with the norm || · ||i, where
||f ||i =
(∫ T
0
γi(t)|f(t)|pdt +∫ T
0
|f ′(t)|pdt
) 1p
.
Since essinfγi > 0 it follows that || · ||i is equivalent to the usual normon W 1,p( ]0, T [ ,R).

6.3 Scalar field systems with nonlinear oscillatory terms 183
• X is the Sobolev space W 1,p( ]0, T [ ,Rn) equipped with the usual norm
||u|| =(∫ T
0
|u(t)|pdt +∫ T
0
|u′(t)|pdt
)1/p
.
We observe that X is isomorphic to W 1,p( ]0, T [ ,R)n.• Let Y be the real Banach space C([0, T ],Rn) endowed with the supre-
mum norm || · ||s. For simplicity we will denote the supremum normon every space C([0, T ],Rm), m ∈ N, with the same symbol || · ||s.
• Put
Σ := u ∈ X | (u(0), u(T )) ∈ S.Note that Σ is a closed convex subset of X containing the constantfunctions.
• Define E1 : Y → R by
E1(u) =∫ T
0
α(t)F (u(t))dt, for every u ∈ Y,
E2 : X → R by
E2(u) =1p(||u1||p1 + · · ·+ ||un||pn), for every u ∈ X,
and ζ1 : X → ]−∞, +∞] by
ζ1(u) =
0, u ∈ Σ
+∞, u /∈ Σ.
The notations used above are inspired from Theorem 1.23.
Lemma 6.2 The following assertions hold:
(a) The above defined maps E1 : X → R and E2 : X → R are of class
C1 and 〈E′1(u); v〉 =
∫ T
0
α(t)f(u(t))v(t)dt, for every u, v ∈ X.
(b) The map ζ1 : X → ]−∞, +∞] is convex, proper, and lower semi-continuous.
Define now I1 : X → ]−∞, +∞] and I2 : X → R by
I1(u) = E1(u) + ζ1(u), I2(u) = E2(u) for every u ∈ X. (6.17)
The energy functional associated to the system (S) is given by I1 + I2 :X → ]−∞,+∞] is given by I1 + I2 = (E1 + E2) + ζ1.

184 Scalar Field Equations with Oscillatory Terms
Our aim is to apply Theorem 1.23 to the maps I1 and I2 defined in(6.17). Indeed,
– X, Y are real Banach spaces, X is reflexive, and X is compactly em-bedded in Y .
– E1 : Y → R, E2 : X → R are locally Lipschitz, and ζ1 is convex,proper, and lower semi-continuous (according to Lemma 6.2).
– Ψ = E2 : X → R is weakly sequentially lower semi-continuous (beingconvex and continuous) and coercive.
– Since infX Ψ = 0 and since Σ contains the constant functions, condi-tion (1.36) is satisfied.
Furthermore we have to introduce some suitable subsets of Rn. Forthis note that, since Xi is embedded in C([0, T ],R), there exist ci > 0,i = 1, n, such that
||f ||s ≤ ci||f ||i, for every f ∈ Xi. (6.18)
For every r > 0, let
A(r) :=
x ∈ Rn :
1p
n∑
i=1
1cpi
|xi|p ≤ r
B(r) :=
x ∈ Rn :
1p
n∑
i=1
|xi|p∫ T
0
γi(t)dt ≤ r
.
(6.19)
Remark 6.5 1) For every r > 0 the inclusion B(r) ⊆ A(r) holds. Tosee this, we observe that relation (6.18) implies
1 ≤ ci
(∫ T
0
γi(t)dt
)1/p
, for i = 1, n.
Pick now an arbitrary x ∈ B(r). Then
1p
n∑
i=1
1cpi
|xi|p ≤ 1p
n∑
i=1
|xi|p∫ T
0
γi(t)dt ≤ r,
hence x ∈ A(r).
2) Since the map x ∈ Rn 7−→n∑
i=1
|xi|p∫ T
0
γi(t)dt ∈ R is convex, we
have for every r > 0,
intB(r) =
x ∈ Rn :
1p
n∑
i=1
|xi|p∫ T
0
γi(t)dt < r
.

6.3 Scalar field systems with nonlinear oscillatory terms 185
Theorem 6.2 Let r > 0 be such that
minx∈A(r)
F (x) = minx∈intB(r)
F (x) .
Then the following assertions hold:
(a) ϕ(r) = 0, where ϕ is defined by relation (1.37).(b) Problem (P ) has a solution u ∈ Σ satisfying Ψ(u) < r.
Proof (a) We have ϕ(r) ≥ 0, by definition. To show the converseinequality choose x0 ∈ intB(r) so that
F (x0) = minx∈intB(r)
F (x) = minx∈A(r)
F (x),
and let u0 : X → Rn be the function taking the constant value x0. Forevery i ∈ 1, . . . , n we have
||u0i ||i = |x0
i |(∫ T
0
γi(t)dt
)1/p
.
Therefore
ψ(u0) =1p
n∑
i=1
|x0i |p
∫ T
0
γi(t)dt < r,
hence u0 ∈ I−12 ( ]−∞, r[). Since I−1
2 ( ]−∞, r]) is convex and closed inthe norm topology, it is closed also in the weak topology, hence
(I−12 (]−∞, r[))w ⊆ I−1
2 ( ]−∞, r]).
Pick now an arbitrary element v ∈ (I−12 (]−∞, r[))w. Then I2(v) ≤ r.
Thus, by (6.18), for all t ∈ [0, T ]
1p
n∑
i=1
1cpi
|vi(t)|p ≤ 1p
n∑
i=1
1cpi
||vi||ps ≤1p
n∑
i=1
||vi||pi = I2(v) ≤ r .
We conclude that v(t) ∈ A(r) for every t ∈ [0, T ]. Hence
F (x0) ≤ F (v(t)), for every t ∈ [0, T ].
It follows that
E1(u0) =∫ T
0
α(t)F (x0)dt ≤∫ T
0
α(t)F (v(t))dt = E1(v) ≤ I1(v).
Since v ∈ (I−12 (]−∞, r[))w was chosen arbitrarily, we conclude that
infv∈(I−1
2 (]−∞,r[))w
I1(v) = I1(u0).

186 Scalar Field Equations with Oscillatory Terms
This implies, according to the definition of ϕ in (1.37),
ϕ(r) ≤ I1(u0)− I1(u0)r − I2(u0)
= 0,
hence ϕ(r) = 0.(b) Since ϕ(r) = 0, we can apply Theorem 1.23 for λ = 1, and conclude
that the map I1 + I2 has a critical point u lying in Σ and such thatI2(u) < r. The assertion follows from Proposition 6.1.
Theorem 6.3 Assume that:
(1) There exists a sequence (rk)k∈N of positive reals such that lim rk =+∞ and
minx∈A(rk)
F (x) = minx∈intB(rk)
F (x), for every k ∈ N.
(2) The following inequality holds
lim inf|x|→+∞
F (x)∫ T
0α(t)dt
∑ni=1 |xi|p
∫ T
0γi(t)dt
< −1p.
Then problem (P ) has an unbounded sequence of solutions.
Proof Assumption (1) implies, according to Theorem 6.2(a), that ϕ(rk) =0, for every k ∈ N. Let γ be defined as in relation (1.38). Since ϕ(r) ≥ 0for every r > 0, we conclude that
γ = lim infr→+∞
ϕ(r) = 0.
Applying Theorem 1.23(a) for λ = 1, we conclude that either assertion(b1) or (b2) of this theorem must hold. Next we show that (b1) is notsatisfied, that is, we prove that I1 + I2 is unbounded below. For this fixa real number q such that
lim inf|x|→+∞
F (x)∫ T
0α(t)dt
∑ni=1 |xi|p
∫ T
0γi(t)dt
< q < −1p.
Choose now a sequence (xk)k∈N in Rn such that lim |xk| = +∞ and
F (xk)∫ T
0α(t)dt
∑ni=1 |xk
i |p∫ T
0γi(t)dt
< q, for every k ∈ N.

6.3 Scalar field systems with nonlinear oscillatory terms 187
For every k ∈ N denote by uk : X → Rn the constant function takingthe value xk. Then the following relations hold for every k ∈ N
I1(uk) + I2(uk) = F (xk)∫ T
0
α(t)dt +1p
n∑
i=1
|xki |p
∫ T
0
γi(t)dt
<
(q +
1p
) n∑
i=1
|xki |p
∫ T
0
γi(t)dt.
Since |xk| → +∞,∫ T
0γi(t)dt > 0, for every i ∈ 1, . . . , n, and q+ 1
p <
0, we conclude that limk→∞(I1(uk) + I2(uk)) = −∞, thus I1 + I2 isunbounded below. The assertion follows now from Theorem 1.23(b2),the definition of I2, and Proposition 6.1.
Theorem 6.4 Assume that:
(1) There exists a sequence (rk)k∈N of positive reals such that lim rk =0 and
minx∈A(rk)
F (x) = minx∈intB(rk)
F (x), for every k ∈ N.
(2) The following inequality holds
lim infx→0n
F (x)∫ T
0α(t)dt
∑ni=1 |xi|p
∫ T
0γi(t)dt
< −1p.
Then problem (S) has a sequence of pairwise distinct solutions whichconverges strongly to the zero function θX ∈ X.
Proof We first observe that θX is the only global minimum of I2. As-sumption (1) and Theorem 6.2(a) imply that ϕ(rk) = 0, for every k ∈ N.Let δ be defined as in relation (1.39). Since ϕ(r) ≥ 0 for every r > 0,we conclude that
δ = lim infr→0+
ϕ(r) = 0.
Applying Theorem 1.23(c) for λ = 1, we conclude that either assertion(c1) or (c2) of this theorem must hold. Next we show that (c1) is notsatisfied, that is, we prove that θX is not a local minimum of I1 + I2.For this fix a real number q such that
lim infx→0n
F (x)∫ T
0α(t)dt
∑ni=1 |xi|p
∫ T
0γi(t)dt
< q < −1p.

188 Scalar Field Equations with Oscillatory Terms
Choose now a sequence (xk)k∈N in Rn such that limxk = 0n and
F (xk)∫ T
0α(t)dt
∑ni=1 |xk
i |p∫ T
0γi(t)dt
< q, for every k ∈ N.
For every k ∈ N denote by uk : X → Rn the constant function takingthe value xk. Then the following relations hold for every k ∈ N
I1(uk) + I2(uk) = F (xk)∫ T
0
α(t)dt +1p
n∑
i=1
|xki |p
∫ T
0
γi(t)dt
<
(q +
1p
) n∑
i=1
|xki |p
∫ T
0
γi(t)dt
≤ 0 = I1(θX) + I2(θX).
We have that lim ||uk|| = 0, thus θX is not a local minimum of I1 +I2. Theorem 1.23(c2) and Proposition 6.1 imply now the existence of asequence (uk) of pairwise distinct solutions of (S) such that lim I2(uk) =0. Since I2 is a norm on X which is equivalent to the norm || · ||, weconclude that (uk) converges strongly to θX in X.
6.4 Applications
We specialize now some of the data of the previous section in order toobtain applications of Theorems 6.3 and 6.4. We assume that n ≥ 1 isa natural number, T = 1, p > 1 is a real number, S ⊆ Rn × Rn is a setsatisfying condition (C2), γi is the function taking the constant value 1,for every i ∈ 1, . . . , n, and α ∈ L1( ]0, T [ ,R) is so that
∫ 1
0α(t) dt > 1
and α(t) ≥ 0 a.e. in ]0, 1[. In this case every norm || · ||i, i = 1, n, reducesto the usual norm on W 1,p( ]0, 1[ ,R), and all the constants ci, i = 1, n,in (6.18) can be considered to be equal to a suitable real number c > 0.Furthermore, we assume in this section that Rn is endowed with thep-norm
|x| =(
n∑
i=1
|xi|p)1/p
.
Thus, for r > 0, the sets A(r) and B(r) defined in (6.19) become
A(r) =
x ∈ Rn :1p· 1cp|x|p ≤ r
B(r) =
x ∈ Rn :
1p|x|p ≤ r
.

6.4 Applications 189
Example 6.2 We give now an application of Theorem 6.3. In order todefine F : Rn → R we consider a function f : [0,+∞[→ [0, +∞[ with thefollowing properties:
(i) f is bijective,(ii) f is strictly increasing,
(iii) limt→+∞
f(t + π)f(t)
> cp,
(iv) f−1 is locally Lipschitz.
Note that the above properties imply that f(0) = 0, f−1 is strictlyincreasing, and
limt→+∞
f(t) = limt→+∞
f−1(t) = +∞.
An example of a function f satisfying properties (i)–(iv) is
t ∈ [0,+∞[ 7−→ at − 1 ∈ [0,+∞[,
where the real a > 1 is chosen so that aπ > cp.Define F : Rn → R by
F (x) =1p|x|p sin f−1 (|x|p) , for every x ∈ Rn.
A straightforward argument yields that F is of class C1 (that is, satisfiescondition (C1)).
We next show that the assumptions (1) and (2) of Theorem 6.3 arefulfilled. Indeed, to check (1), we observe that by (iii) and for everysufficiently large k ∈ N,
f((2k + 1)π)f(2kπ)
> cp. (6.20)
For these values of k put
rk :=f((2k + 1)π)
pcp.
Then lim rk = +∞. Furthermore,
minx∈A(rk)
F (x) = min|x|p≤f((2k+1)π)
F (x). (6.21)
If f(2kπ) ≤ |x|p ≤ f((2k + 1)π), then
2kπ ≤ f−1 (|x|p) ≤ (2k + 1)π,
hence
sin(f−1 (|x|p)) ≥ 0, .

190 Scalar Field Equations with Oscillatory Terms
This means that F ≥ 0. Taking into account that F (0n) = 0, it followsthat
min|x|p≤f((2k+1)π)
F (x) = min|x|p≤f(2kπ)
F (x). (6.22)
On the other hand, if x ∈ Rn is so that |x|p ≤ f(2kπ) then, in view of(6.20), we have
1p|x|p ≤ 1
pf(2kπ) <
f((2k + 1)π)pcp
= rk. (6.23)
Using (6.21), (6.22), and (6.23), we conclude that
minx∈A(rk)
F (x) = minx∈intB(rk)
F (x) ,
hence assumption (1) of Theorem 6.3 is fulfilled. For assumption (2) weobserve that
lim inf|x|→+∞
F (x)∫ 1
0α(t)dt∑n
i=1 |xi|p = lim inf|x|→+∞
1p
sin(f−1 (|x|p))
∫ 1
0
α(t)dt
= −1p
∫ 1
0
α(t)dt < −1p
.
Theorem 6.3 yields now that problem (P ) has an unbounded sequenceof solutions.
Example 6.3 To get an application of Theorem 6.4 consider a functionf : ]0,+∞[→ ]0, +∞[ with the following properties:
(i) f is surjective,(ii) f is strictly increasing,(iii) f is differentiable on ]0, +∞[,
(iv) the map t ∈ ]0, +∞[ 7→ f ′( 1t )
t ∈ R is bounded on every interval]0, a[, a > 0,
(v) limt→+∞
f−1(t + π)f−1(t)
> cp.
Under these assumptions, f−1 is strictly increasing and limt→+∞
f−1(t) =
+∞. An example for a function satisfying properties (i)–(v) is
t ∈ ]0, +∞[ 7−→ loga(t + 1) ∈ ]0,+∞[,
where the real a > 1 is chosen so that aπ > cp.

6.4 Applications 191
Define g : [0, +∞[→ R by
g(t) =
t sin f (1/t) , t 6= 0
0, t = 0.
This map has the following properties:
• g is continuous on [0, +∞[,• g is differentiable on ]0, +∞[ and g is not differentiable in 0,• g′ is bounded on every interval ]0, a[, a > 0. This follows from
property (iv) of f and the fact that for every t > 0 we haveg′(t) = sin f (1/t)− cos f (1/t) f ′(1/t)
t .
Define now F : Rn → R by
F (x) =1p
g(|x|p), for every x ∈ Rn.
Since p > 1, it follows that F is of class C1.We next show that F satisfies conditions (1) and (2) of Theorem 6.4.
To verify (1), we observe that (by (v)) and for every sufficiently largek ∈ N
f−1((2k + 1)π)f−1(2kπ)
> cp. (6.24)
For these values of k put
rk :=1
pcp· 1f−1(2kπ)
.
Then lim rk = 0. Furthermore,
minx∈A(rk)
F (x) = min|x|p≤ 1
f−1(2kπ)
F (x). (6.25)
If 1f−1((2k+1)π) ≤ |x|p ≤ 1
f−1(2kπ) , then
2kπ ≤ f
(1|x|p
)≤ (2k + 1)π,
hence
sin f
(1|x|p
)≥ 0 .
Therefore F ≥ 0. Taking into account that F (0n) = 0, it follows that
min|x|p≤ 1
f−1(2kπ)
F (x) = min|x|p≤ 1
f−1((2k+1)π)
F (x). (6.26)

192 Scalar Field Equations with Oscillatory Terms
On the other hand, if x ∈ Rn is so that |x|p ≤ 1f−1((2k+1)π) , then, in
view of (6.24), we have that
1p|x|p ≤ 1
p
1f−1((2k + 1)π)
<1
pcp· 1f−1(2kπ)
= rk. (6.27)
Using relations (6.25), (6.26), and (6.27), we conclude that
minx∈A(rk)
F (x) = minx∈intB(rk)
F (x),
hence assumption (1) of Theorem 6.4 is fulfilled. For assumption (2) weobserve that
lim infx→0n
F (x)∫ 1
0α(t)dt∑n
i=1 |xi|p = lim infx→0n
1p
sin f
(1|x|p
) ∫ 1
0
α(t)dt
= −1p
∫ 1
0
α(t)dt < −1p
.
According to Theorem 6.4, problem (P ) has a sequence of pairwise dis-tinct solutions which converges strongly to the zero function θX ∈ X.
6.5 Comments and historical notes
In the last few years, many papers were dedicated to the study of p-Laplacian systems with various types of boundary conditions. We men-tion here Manasevich and Mawhin [197], [198], Mawhin [205], Gasinskiand Papageorgiu [124], Jebelean and Morosanu [147], [148]. The meth-ods used in these papers to prove the existence or multiple solutions ofp-Laplacian systems are based on degree theory, minimax result, fixedpoint theorems, or on continuation methods of Leray-Schauder type.Jebelean [146] used the symmetric version of the mountain pass the-orem to prove the existence of infinitely many solutions for problem(Pλ,µ). Proposition 6.1 and Lemma 6.1 appear in the paper by Jebeleanand Morosanu [148], while Theorem 6.2 is due to Lisei, Morosanu, andVarga [193]. The results contained in Section 6.3 are due to Brecknerand Varga [45].

7
Competition Phenomena in DirichletProblems
The purpose of models is notto fit the data but to sharpenthe questions.
Samuel Karlin (1924–2007)
Having infinitely many solutions for a given equation, after a ‘small’perturbation of it, one might be expected to find still many solutionsfor the perturbed equation; moreover, once the perturbation tends tozero, the number of solutions for the perturbed equation should tendto infinity. Such phenomenon is well-known in the case of the equationsin x = c with c ∈ (−1, 1) fixed, and its perturbation sinx = c + εx, x ∈R; the perturbed equation has more and more solutions as |ε| decreasesto 0. This natural phenomenon has been first exploited in an abstractframework by Krasnosel’skii [161]. More precisely, by using topologicalmethods, Krasnosel’skii asserts the existence of more and more criticalpoints of an even functional of class C1 perturbed by a non-even termtending to zero, the critical points of the perturbed functional being thesolutions for the studied equation.
The purpose of this chapter is to study the number and behaviour ofsolutions to a Dirichlet problem which involves an oscillatory nonlinear-ity and a pure power term.
7.1 Introduction
We consider the multiplicity of solutions to the problem−4u = λa(x)up + f(u) in Ω,
u ≥ 0, u 6≡ 0 in Ω,
u = 0 on ∂Ω,
(Pλ)
193

194 Competition Phenomena in Dirichlet Problems
where Ω is a smooth bounded domain in RN (N ≥ 3), f : [0,∞) → Roscillates near the origin or at infinity, and p > 0, λ ∈ R. Denotingformally 0+ or +∞ by the common symbol L (standing for a limit point),we assume on the continuous nonlinearity f that
(fL1 ) −∞ < lim infs→L
F (s)s2 ≤ lim sups→L
F (s)s2 = +∞;
(fL2 ) lL := lim infs→L
f(s)s < 0,
where F (s) =∫ s
0f(t)dt. One can easily observe that f has an oscillatory
behaviour at L.While oscillatory right hand sides usually produce infinitely many dis-
tinct solutions, the additional term involving up may alter the situa-tion radically. Our purpose is to fully describe this phenomenon, show-ing that the number of distinct nontrivial solutions to problem (Pλ) isstrongly influenced by up and depends on λ whenever one of the follow-ing two cases holds:• p ≤ 1 and f oscillates near the origin;• p ≥ 1 and f oscillates at infinity (p may be critical or even super-
critical). The coefficient a ∈ L∞(Ω) is allowed to change its sign, whileits size is relevant only for the threshold value p = 1 when the behaviourof f(s)/s also plays a crucial role in both cases.
7.2 Effects of the competition
In this section we present the main results of this chapter, establishingas well some interesting connections between the behaviour of certainalgebraic equations and PDEs.
We notice that our problem (Pλ) can be compared with elliptic prob-lems involving the so-called concave-convex nonlinearities, see Ambrosetti-Brezis-Cerami [5], de Figueiredo-Gossez-Ubilla [117], [116]. In such acase, the sublinear term up and the superlinear term f(u) = uq competewith each other, where 0 ≤ p < 1 < q ≤ (N + 2)/(N − 2) = 2∗− 1. As aconsequence of this competition, problem (Pλ) has at least two positivesolutions for small λ > 0 and no positive solution for large λ. Sinceu 7→ −∆u is a linear map, the above statement is well reflected by thealgebraic equation
s = λsp + sq, s > 0. (Eλp,q)
Indeed, there exists a λ∗ > 0 such that for every λ ∈ (0, λ∗) equation(Eλ
p,q) has two solutions, (Eλ∗p,q) has one solution, and for λ > λ∗ equation
(Eλp,q) has no solution, see Figure 7.1.

7.2 Effects of the competition 195
Fig. 7.1. Let 0 ≤ p < 1 < q. For every λ1 < λ∗ < λ2, the algebraic equation (Eλ1p,q)
has two solutions, while (Eλ2p,q) has no solution.
Equations involving oscillatory terms usually give infinitely many dis-tinct solutions, see Kristaly [168], Kristaly-Morosanu-Tersian [173], Omari-Zanolin [229], Saint Raymond [265]. However, surprising facts may occureven in simple cases; indeed, if p = 1 and we consider the oscillatory func-tion f(s) = fµ(s) = µ sin s (µ ∈ R), problem (Pλ) has only the trivialsolution whenever (|λ| · ‖a‖L∞ + |µ|)λ1(Ω) < 1, where λ1(Ω) denotes theprincipal eigenvalue of −4 on H1
0 (Ω), and ‖ · ‖L∞ is the L∞(Ω)-norm.In order to obtain infinitely many distinct solutions for (P0) we have toconsider a class of functions having a suitable oscillatory behaviour; thisclass consists from functions which fulfill (fL
1 ) and (fL2 ), L ∈ 0+,+∞.
In the sequel, we state our main results, treating separately the twocases, i.e., when f oscillates near the origin, and at infinity, respec-tively. The coefficient a ∈ L∞(Ω) is allowed to be indefinite (i.e.,it may change its sign), suggested by several recent works, includingAlama-Tarantello [3], [2], Berestycki-Cappuzzo Dolcetta-Nirenberg [35],de Figueiredo-Gossez-Ubilla [117], [116], Servadei [270].
A. Oscillation near the origin. Let f ∈ C([0,∞),R) and F (s) =∫ s
0f(t)dt, s ≥ 0. We assume

196 Competition Phenomena in Dirichlet Problems
(f01 ) −∞ < lim infs→0+
F (s)s2 ; lim sups→0+
F (s)s2 = +∞;
(f02 ) l0 := lim infs→0+
f(s)s < 0.
Remark 7.1 Hypotheses (f01 ) and (f0
2 ) imply an oscillatory behaviourof f near the origin. Let α, β, γ ∈ R such that 0 < α < 1 < α + β,
and γ ∈ (0, 1). The function f0 : [0,∞) → R defined by f0(0) = 0 andf0(s) = sα(γ + sin s−β), s > 0, verifies (f0
1 ) and (f02 ), respectively.
Theorem 7.1 (Case p ≥ 1) Assume a ∈ L∞(Ω) and let f ∈ C([0,∞),R)satisfy (f0
1 ) and (f02 ). If
(i) either p = 1 and λa(x) < λ0 a.e. x ∈ Ω for some 0 < λ0 < −l0,
(ii) or p > 1 and λ ∈ R is arbitrary,then there exists a sequence u0
i i ⊂ H10 (Ω) of distinct weak solutions of
problem (Pλ) such that
limi→∞
‖u0i ‖H1
0= lim
i→∞‖u0
i ‖L∞ = 0. (7.1)
Remark 7.2 (i) If l0 = −∞, then (i) holds for every λ ∈ R. For instance,this may happen for f0 from Remark 7.1.
(ii) Notice that p > 1 may be critical or even supercritical in Theorem7.1(ii). Having a suitable nonlinearity oscillating near the origin, Theo-rem 7.1 roughly says that the term defined by s 7→ sp (s ≥ 0) does notaffect the number of distinct solutions of (Pλ) whenever p > 1; this isalso the case for certain values of λ ∈ R when p = 1. A similar relationmay be stated as before for both the equation (Eλ
p,q) and the ellipticproblem involving concave-convex nonlinearities. Namely, the thesis ofTheorem 7.1 is nicely illustrated by the equation
s = λsp + f0(s), s ≥ 0, (E0)
where f0 is the function appearing in Remark 7.1. Since l0 = −∞,for every λ ∈ R and p ≥ 1, equation (E0) has infinitely many distinctpositive solutions.
On the other hand, this phenomenon dramatically changes when p <
1. In this case, the term s 7→ sp (s ≥ 0) may compete with the functionf0 near the origin such that the number of distinct solutions of (E0)becomes finite for many values of λ; this fact happens when 0 < p < α (αis the number defined in Remark 7.1). However, the number of distinctsolutions to (E0) becomes greater and greater if |λ| gets smaller andsmaller as a simple (graphical) argument shows. See Figure 7.2.

7.2 Effects of the competition 197
Fig. 7.2. For any λ ∈ R and p = p1 > 1, (E0) has infinitely many distinct solutions,see (a). However, for many λ ∈ R and p = p2 < 1, (E0) has only finitely manydistinct solutions, see (b).
In the language of our Dirichlet problem (Pλ), the latter statement isperfectly described by the following result.
Theorem 7.2 (Case 0 < p < 1) Assume a ∈ L∞(Ω). Let f ∈C([0,∞),R) satisfy (f0
1 ) and (f02 ), and 0 < p < 1. Then, for every
k ∈ N, there exists λ0k > 0 such that (Pλ) has at least k distinct weak
solutions u01,λ, ..., u0
k,λ ⊂ H10 (Ω) whenever λ ∈ [−λ0
k, λ0k]. Moreover,
‖u0i,λ‖H1
0< i−1 and ‖u0
i,λ‖L∞ < i−1 for any i = 1, k; λ ∈ [−λ0k, λ0
k].(7.2)
B. Oscillation at infinity. Let f ∈ C([0,∞),R). We assume
(f∞1 ) −∞ < lim infs→∞F (s)s2 ; lim sups→∞
F (s)s2 = +∞;
(f∞2 ) l∞ := lim infs→∞f(s)
s < 0.
Remark 7.3 Hypotheses (f∞1 ) and (f∞2 ) imply an oscillatory behaviourof f at infinity. Let α, β, γ ∈ R such that 1 < α, |α − β| < 1, andγ ∈ (0, 1). Then, the function f∞ : [0,∞) → R defined by f∞(s) =sα(γ + sin sβ) verifies the hypotheses (f∞1 ) and (f∞2 ), respectively.
The counterpart of Theorem 7.1 can be stated as follows.

198 Competition Phenomena in Dirichlet Problems
Theorem 7.3 (Case p ≤ 1) Assume a ∈ L∞(Ω). Let f ∈ C([0,∞),R)satisfy (f∞1 ) and (f∞2 ) with f(0) = 0. If
(i) either p = 1 and λa(x) < λ∞ a.e. x ∈ Ω for some 0 < λ∞ < −l∞,
(ii) or p < 1 and λ ∈ R is arbitrary,then there exists a sequence u∞i i ⊂ H1
0 (Ω) of distinct, weak solutionsof problem (Pλ) such that
limi→∞
‖u∞i ‖L∞ = ∞. (7.3)
Remark 7.4 If
sups∈[0,∞)
|f(s)|1 + s2∗−1
< ∞ (7.4)
then we also have limi→∞ ‖u∞i ‖H10
= ∞ in Theorem 7.3. For details,see Section 7.5.
Remark 7.5 A similar observation can be made as in Remark 7.2.Indeed, when f oscillates at infinity, Theorem 7.3 shows that the termdefined by s 7→ sp (s ≥ 0) does not affect the number of distinct solutionsof (Pλ) whenever p < 1. This is also the case for certain values of λ ∈ Rwhen p = 1. A similar phenomenon occurs in the equation
s = λsp + f∞(s), s ≥ 0, (E∞)
where f∞ is the function defined in Remark 7.3. Since l∞ = −∞, forevery λ ∈ R and p ≤ 1, equation (E∞) has infinitely many distinctpositive solutions.
On the other hand, when p > 1, the term s 7→ sp (s ≥ 0) maydominate the function f∞ at infinity. In particular, when α < p, thenumber of distinct solutions of (E∞) may become finite for many valuesof λ (here, α is the number defined in Remark 7.3). The positive findingis that the number of distinct solutions for (E∞) increases whenever |λ|decreases to zero. See Figure 7.3.
In view of this observation, we obtain a natural counterpart of Theo-rem 7.2.
Theorem 7.4 (Case p > 1) Assume a ∈ L∞(Ω). Let f ∈ C([0,∞),R)satisfy (f∞1 ) and (f∞2 ) with f(0) = 0, and p > 1. Then, for every k ∈ N,there exists λ∞k > 0 such that (Pλ) has at least k distinct weak solutionsu∞1,λ, ..., u∞k,λ ⊂ H1
0 (Ω) whenever λ ∈ [−λ∞k , λ∞k ]. Moreover,
‖u∞i,λ‖L∞ > i− 1 for any i = 1, k; λ ∈ [−λ∞k , λ∞k ]. (7.5)

7.2 Effects of the competition 199
Fig. 7.3. For any λ ∈ R and p = p1 < 1, (E∞) has infinitely many distinct solutions,see (a). However, for many λ ∈ R and p = p2 > 1, (E∞) has only finitely many (or,even none) distinct solutions, see (b).
Remark 7.6 If f verifies (7.4) and p ≤ 2∗ − 1 in Theorem 7.4, then
‖u∞i,λ‖H10
> i− 1 for any i = 1, k; λ ∈ [−λ∞k , λ∞k ].
We conclude this section by stating a result for a model problemwhich involves concave-convex nonlinearities and an oscillatory term.We consider the problem
−4u = λup + µuq + f(u), u ≥ 0 on Ω,
u = 0 on ∂Ω,(Pλ,µ)
where 0 < p < 1 < q, and λ, µ ∈ R. The following result proves thatthe number of solutions (Pλ,µ) is influenced
(i) by the sublinear term when f oscillates near the origin (with noeffect of the superlinear term); and alternatively,
(ii) by the superlinear term when f oscillates at infinity (with noeffect of the sublinear term).
More precisely, applying Theorems 7.2 and 7.4, we have

200 Competition Phenomena in Dirichlet Problems
Theorem 7.5 Let f ∈ C([0,∞),R) and 0 < p < 1 < q.
(i) If (f01 ) and (f0
2 ) hold, then for every k ∈ N and µ ∈ R, there existsλk,µ > 0 such that (Pλ,µ) has at least k distinct weak solutionsin H1
0 (Ω) whenever λ ∈ [−λk,µ, λk,µ].(ii) If (f∞1 ) and (f∞2 ) hold with f(0) = 0, then for every k ∈ N
and λ ∈ R, there exists µk,λ > 0 such that (Pλ,µ) has at least k
distinct weak solutions in H10 (Ω) whenever µ ∈ [−µk,λ, µk,λ].
7.3 A general location result
We consider the problem −4u + K(x)u = h(x, u), u ≥ 0 in Ω,
u = 0 on ∂Ω,(PK
h )
and assume that
(HK): K ∈ L∞(Ω), essinfΩK > 0;(H1
h): h : Ω × [0,∞) → R is a Caratheodory function, h(x, 0) = 0 fora.e. x ∈ Ω, and there is Mh > 0 such that |h(x, s)| ≤ Mh for a.e.x ∈ Ω and all s ∈ R;
(H2h): there are 0 < δ < η such that h(x, s) ≤ 0 for a.e. x ∈ Ω and all
s ∈ [δ, η].
We extend the function h by h(x, s) = 0 for a.e. x ∈ Ω and s ≤ 0. Weintroduce the energy functional E : H1
0 (Ω) → R associated with problem(PK
h ), defined by
E(u) =12‖u‖2H1
0+
12
∫
Ω
K(x)u2dx−∫
Ω
H(x, u(x))dx, u ∈ H10 (Ω),
where H(x, s) =∫ s
0h(x, t)dt, s ∈ R. Due to hypothesis (H1
h), it is easyto see that E is well-defined. Moreover, standard arguments show thatE is of class C1 on H1
0 (Ω).Finally, considering the number η ∈ R from (H2
h), we introduce theset
W η = u ∈ H10 (Ω) : ‖u‖L∞ ≤ η.
Since h(x, 0) = 0, then 0 is clearly a solution of (PKh ). In the sequel,
under some general assumptions, we guarantee the existence of a (pos-sible trivial) weak solution of (PK
h ) which is indispensable in our furtherinvestigations (see Sections 7.4 and 7.5).

7.3 A general location result 201
Theorem 7.6 Assume that (HK), (H1h), (H2
h) hold. Then
(i) the functional E is bounded from below on W η and its infimumis attained at some u ∈ W η;
(ii) u(x) ∈ [0, δ] for a.e. x ∈ Ω;(iii) u is a weak solution of (PK
h ).
Proof. (i) Due to (H1h) and by using Holder’s and Poincare’s inequali-
ties, the functional E is bounded from below on the whole space H10 (Ω).
In addition, one can easily see that E is sequentially weak lower semi-continuous and the set W η is convex and closed in H1
0 (Ω), thus weaklyclosed. Combining these facts, there is an element u ∈ W η which is aminimum point of E over W η.
(ii) Let A = x ∈ Ω : u(x) /∈ [0, δ] and suppose that m(A) > 0.
Here and in the sequel, m(·) denotes the Lebesgue measure. Define thefunction γ : R → R by γ(s) = min(s+, δ), where s+ = max(s, 0). Now,set w = γ u. Since γ is a Lipschitz function and γ(0) = 0, the theoremof Marcus-Mizel [201] shows that w ∈ H1
0 (Ω). Moreover, 0 ≤ w(x) ≤ δ
for a.e. Ω. Consequently, w ∈ W η.
We introduce the sets A1 = x ∈ A : u(x) < 0 and A2 = x ∈ A :u(x) > δ. Thus, A = A1 ∪ A2, and we have that w(x) = u(x) for allx ∈ Ω \ A, w(x) = 0 for all x ∈ A1, and w(x) = δ for all x ∈ A2.Moreover, we have
E(w)− E(u) =
=12
[‖w‖2H1
0− ‖u‖2H1
0
]+
12
∫
Ω
K(x)[w2 − u2
]−∫
Ω
[H(x, w)−H(x, u)]
= −12
∫
A
|∇u|2 +12
∫
A
K(x)[w2 − u2]−∫
A
[H(x, w)−H(x, u)].
Since essinfΩK > 0, one has∫
A
K(x)[w2 − u2] = −∫
A1
K(x)u2 +∫
A2
K(x)[δ2 − u2] ≤ 0.
Due to the fact that h(x, s) = 0 for all s ≤ 0, one has∫
A1
[H(x, w)−H(x, u)] = 0.
By the mean value theorem, for a.e. x ∈ A2, there exists θ(x) ∈[δ, u(x)] ⊆ [δ, η] such that
H(x,w(x))−H(x, u(x)) = H(x, δ)−H(x, u(x)) = h(x, θ(x))(δ − u(x)).

202 Competition Phenomena in Dirichlet Problems
Thus, on account of (H2h), one has
∫
A2
[H(x, w)−H(x, u)] ≥ 0.
Consequently, every term of the expression E(w)−E(u) is non-positive.On the other hand, since w ∈ W η, then E(w) ≥ E(u) = infW η E . So,every term in E(w)− E(u) should be zero. In particular,
∫
A1
K(x)u2 =∫
A2
K(x)[u2 − δ2] = 0.
Due to (HK), we necessarily have m(A) = 0, contradicting our assump-tion.
(iii) Let us fix v ∈ C∞0 (Ω) and let ε0 = (η − δ)/(‖v‖C0 + 1) > 0.
Define the function E : [−ε0, ε0] → R by E(ε) = E(u + εv) withε ∈ [−ε0, ε0]. Due to (ii), for every ε ∈ [−ε0, ε0], the element u + εv
belongs to the set W η. Consequently, due to (i), one has E(ε) ≥ E(0)for every ε ∈ [−ε0, ε0]. Since E is differentiable at 0 and E′(0) = 0 itfollows that 〈E ′(u), v〉H1
0= 0. Since v ∈ C∞0 (Ω) is arbitrary, and the set
C∞0 (Ω) is dense in H10 (Ω), we obtain that u is a weak solution of (PK
h ). ¤
We conclude this section by constructing a special function whichwill be useful in the proof of our theorems. In the sequel, let B(x0, r) ⊂ Ωbe the N -dimensional ball with radius r > 0 and center x0 ∈ Ω. Fors > 0, define
zs(x) =
0, if x ∈ Ω \B(x0, r);s, if x ∈ B(x0, r/2);2sr (r − |x− x0|), if x ∈ B(x0, r) \B(x0, r/2).
(7.6)
It is clear that zs ∈ H10 (Ω). Moreover, we have ‖zs‖L∞ = s and
‖zs‖2H10
=∫
Ω
|∇zs|2 = 4rN−2(1− 2−N )ωNs2 ≡ C(r,N)s2 > 0, (7.7)
where ωN is the volume of B(0, 1) ⊂ RN .
Notation. For every η > 0, we define the truncation function τη :[0,∞) → R by τη(s) = min(η, s), s ≥ 0.

7.4 Nonlinearities with oscillation near the origin 203
7.4 Nonlinearities with oscillation near the origin
Since parts (i) and (ii) of Theorem 7.1 will be treated simultaneously,we consider again the problem from the previous Section
−4u + K(x)u = h(x, u), u ≥ 0 in Ω,
u = 0 on ∂Ω,(PK
h )
where the potential K : Ω → R fulfills (HK). The function h : Ω ×[0,∞) → R is Caratheodory, and we assume
(H00): h(x, 0) = 0 for a.e. x ∈ Ω, and there exists s0 > 0 such that
sups∈[0,s0]
|h(·, s)| ∈ L∞(Ω);
(H01): −∞ < lim infs→0+
H(x,s)s2 and lim sups→0+
H(x,s)s2 = +∞ uni-
formly for a.e. x ∈ Ω; here, H(x, s) =∫ s
0h(x, t)dt;
(H02): there are two sequences δi, ηi with 0 < ηi+1 < δi < ηi,
limi→∞ ηi = 0, and h(x, s) ≤ 0 for a.e. x ∈ Ω and for everys ∈ [δi, ηi], i ∈ N.
Theorem 7.7 Assume (HK), (H00), (H0
1) and (H02) hold. Then there
exists a sequence u0i i ⊂ H1
0 (Ω) of distinct weak solutions of problem(PK
h ) such that
limi→∞
‖u0i ‖H1
0= lim
i→∞‖u0
i ‖L∞ = 0. (7.8)
Proof Without any loss of generality, we may assume that δii, ηii ⊂(0, s0), where s0 > 0 comes from (H0
0). For every i ∈ N, define thetruncation function hi : Ω× [0,∞) → R by
hi(x, s) = h(x, τηi(s)) (7.9)
and let Ei : H10 (Ω) → R be the energy functional associated with the
problem (PKhi
). Let Hi(x, s) =∫ s
0hi(x, t)dt.
Due to hypotheses (H00) and (H0
2), the function hi verifies the assump-tions of Theorem 7.6 for every i ∈ N with [δi, ηi]. Consequently, for everyi ∈ N, there exists u0
i ∈ W ηi such that
u0i is the minimum point of the functional Ei on W ηi , (7.10)
u0i (x) ∈ [0, δi] for a.e. x ∈ Ω, (7.11)
u0i is a weak solution of (PK
hi). (7.12)

204 Competition Phenomena in Dirichlet Problems
Thanks to (7.9), (7.11) and (7.12), u0i is a weak solution not only for
(PKhi
) but also for the problem (PKh ).
Now, we prove that there are infinitely many distinct elements in thesequence u0
i i. To see this, we first prove that
Ei(u0i ) < 0 for all i ∈ N; (7.13)
limi→∞
Ei(u0i ) = 0. (7.14)
The left part of (H01) implies the existence of some lh0 > 0 and ζ ∈ (0, η1)
such that
essinfx∈ΩH(x, s) ≥ −lh0s2 for all s ∈ (0, ζ). (7.15)
Let Lh0 > 0 be large enough so that
12C(r,N) +
(12‖K‖L∞ + lh0
)m(Ω) < Lh
0 (r/2)NωN , (7.16)
where r > 0 and C(r,N) > 0 come from (7.7). Taking into account theright part of (H0
1), there is a sequence sii ⊂ (0, ζ) such that si ≤ δi
and
essinfx∈ΩH(x, si) > Lh0 s2
i for all i ∈ N. (7.17)
Let i ∈ N be a fixed number and let zsi ∈ H10 (Ω) be the function from
(7.6) corresponding to the value si > 0. Then zsi ∈ W ηi , and on accountof (7.7), (7.17) and (7.15), one has
Ei(zsi) =12‖zsi‖2H1
0+
12
∫
Ω
K(x)z2si−
∫
Ω
Hi(x, zsi(x))dx
=12C(r,N)s2
i +12
∫
Ω
K(x)z2si
−∫
B(x0,r/2)
H(x, si)dx−∫
B(x0,r)\B(x0,r/2)
H(x, zsi(x))dx
≤[12C(r,N) +
12‖K‖L∞m(Ω)− Lh
0 (r/2)NωN + lh0m(Ω)]
s2i .
Consequently, using (7.10) and (7.16), we obtain that
Ei(u0i ) = min
W ηiEi ≤ Ei(zsi) < 0 (7.18)
which proves in particular (7.13). Now, let us prove (7.14). For everyi ∈ N, by using the mean value theorem, (7.9), (H0
0) and (7.11), we have
Ei(u0i ) ≥ −
∫
Ω
Hi(x, u0i (x))dx ≥ −‖ sup
s∈[0,s0]
|h(·, s)|‖L∞m(Ω)δi.

7.4 Nonlinearities with oscillation near the origin 205
Due to limi→∞ δi = 0, the above inequality and (7.18) leads to (7.14).On account of (7.9) and (7.11), we observe that
Ei(u0i ) = E1(u0
i ) for all i ∈ N.
Combining this relation with (7.13) and (7.14), we see that the sequenceu0
i i contains infinitely many distinct elements.It remains to prove relation (7.8). The former limit easily follows by
(7.11), i.e. ‖u0i ‖L∞ ≤ δi for all i ∈ N, combined with limi→∞ δi = 0. For
the latter limit, we use (7.18), (H00), (7.9) and (7.11), obtaining for all
i ∈ N that
12‖u0
i ‖2H10
≤ 12‖u0
i ‖2H10
+12
∫
Ω
K(x)(u0i )
2
<
∫
Ω
Hi(x, u0i (x)) ≤ ‖ sup
s∈[0,s0]
|h(·, s)|‖L∞m(Ω)δi
which concludes the proof of Theorem 7.7.
Proof of Theorem 7.1. (i) Case p = 1. Let λ ∈ R as in the hypothesis,i.e., λa(x) < λ0 a.e. x ∈ Ω for some 0 < λ0 < −l0. Let us chooseλ0 ∈ (λ0,−l0) and
K(x) = λ0 − λa(x) and h(x, s) = λ0s + f(s) for all (x, s) ∈ Ω× [0,∞).(7.19)
Note that essinfΩK ≥ λ0 − λ0 > 0, so (HK) is satisfied. Due to (f01 )
and (f02 ), we have f(0) = 0. Thus, (H0
0) clearly holds. Moreover, sinceH(x, s)/s2 = λ0/2 + F (s)/s2, s > 0, hypothesis (f0
1 ) implies (H01). Fi-
nally, since l0 < −λ0, there exists a sequence sii ⊂ (0, 1) convergingto 0 such that f(si)/si < −λ0 for all i ∈ N. Consequently, by using thecontinuity of f , we may choose two sequences δii, ηii ⊂ (0, 1) suchthat 0 < ηi+1 < δi < si < ηi, limi→∞ ηi = 0, and λ0s + f(s) ≤ 0 for alls ∈ [δi, ηi] and i ∈ N. Therefore, (H0
2) holds too. It remains to applyTheorem 7.7, observing that (PK
h ) is equivalent to problem (Pλ) via thechoice (7.19).
(ii) Case p > 1. Let λ ∈ R be arbitrary fixed. Let us also fix a numberλ0 ∈ (0,−l0) and choose
K(x) = λ0 and h(x, s) = λa(x)sp +λ0s+f(s) for all (x, s) ∈ Ω× [0,∞).(7.20)
Clearly, (HK) is satisfied. Since a ∈ L∞(Ω), a simple argument yieldsthat (H0
0) also holds. Moreover, since p > 1 and H(x, s)/s2 = λa(x)sp−1/(p+

206 Competition Phenomena in Dirichlet Problems
1) + λ0/2 + F (s)/s2, s > 0, hypothesis (f01 ) implies (H0
1). Note that fora.e x ∈ Ω and every s ∈ [0,∞), we have
h(x, s) ≤ |λ| · ‖a‖L∞sp + λ0s + f(s) ≡ h0(s). (7.21)
Due to (f02 ),
lim infs→0+
h0(s)s
= λ0 + l0 < 0.
In particular, there exists a sequence sii ⊂ (0, 1) converging to 0such that h0(si) < 0 for all i ∈ N. Consequently, by using the conti-nuity of h0, we can choose two sequences δii, ηii ⊂ (0, 1) such that0 < ηi+1 < δi < si < ηi, limi→∞ ηi = 0, and h0(s) ≤ 0 for all s ∈ [δi, ηi]and i ∈ N. Therefore, by using (7.21), hypothesis (H0
2) holds. Now,we can apply Theorem 7.7; problem (PK
h ) is equivalent to problem (Pλ)through the choice (7.20). In both cases (i.e., (i) and (ii)), relation (7.1)is implied by (7.8). This completes the proof of Theorem 7.1. ¤
Proof of Theorem 7.2. The proof is divided into four steps.Step 1. Let λ0 ∈ (0,−l0). On account of (f0
1 ), there exists a sequencesii ⊂ (0, 1) converging to 0, such that f(si)/si < −λ0. For every λ ∈ Rdefine the functions hλ : Ω× R→ R and h : R2 → R by
hλ(x, s) = λa(x)sp + λ0s + f(s) for all (x, s) ∈ Ω× [0,∞);
h(λ, s) = |λ| · ‖a‖L∞sp + λ0s + f(s) for all s ∈ [0,∞).
Since h(0, si) = λ0si + f(si) < 0 and due to the continuity of h, we canchoose three sequences δii, ηii, λii ⊂ (0, 1) such that 0 < ηi+1 <
δi < si < ηi, limi→∞ ηi = 0, and for every i ∈ N,
h(λ, s) ≤ 0 for all λ ∈ [−λi, λi] and s ∈ [δi, ηi]. (7.22)
Clearly, we may assume that
δi ≤ mini−1, 2−1i−2[1 + ‖a‖L1 + m(Ω) maxs∈[0,1]
|f(s)|]−1, i ∈ N. (7.23)
Since hλ(x, s) ≤ h(λ, s) for a.e. x ∈ Ω and all (λ, s) ∈ R × [0,∞), onaccount of (7.22), for every i ∈ N, we have
hλ(x, s) ≤ 0 for a.e. x ∈ Ω and all λ ∈ [−λi, λi], s ∈ [δi, ηi]. (7.24)
For every i ∈ N and λ ∈ [−λi, λi], let hλi : Ω× [0,∞) → R be defined by
hλi (x, s) = hλ(x, τηi(s)) (7.25)

7.4 Nonlinearities with oscillation near the origin 207
and K(x) = λ0. Let also Ei,λ : H10 (Ω) → R be the energy functional
associated with the problem (PKhλ
i), i.e.,
Ei,λ(u) =12‖u‖2H1
0+
12
∫
Ω
K(x)u2 −∫
Ω
(∫ u(x)
0
hλi (x, s)ds
)dx. (7.26)
Then, for every i ∈ N and λ ∈ [−λi, λi], the function hλi verifies the
hypotheses of Theorem 7.6; see (7.24) for (H2hλ
i). Therefore, for every
i ∈ N and λ ∈ [−λi, λi]
there exists u0i,λ ∈ W ηi such that Ei,λ(u0
i,λ) = minW ηi
Ei,λ; (7.27)
u0i,λ(x) ∈ [0, δi] for a.e. x ∈ Ω, (7.28)
u0i,λ is a weak solution of (PK
hλi). (7.29)
Due to the definition of the functions hλi and K, u0
i,λ is a weak solutionnot only for (PK
hλi), see (7.25), (7.28) and (7.29), but also for our initial
problem (Pλ) once we guarantee that u0i,λ 6≡ 0.
Step 2. For λ = 0, the function hλi = h0
i verifies the hypotheses ofTheorem 7.7; more precisely, h0
i is precisely the function appearing in(7.9) and Ei := Ei,0 is the energy functional associated with problem(PK
h0i). Consequently, besides (7.27)-(7.29), the elements u0
i := u0i,0 also
verify
Ei(u0i ) = min
W ηiEi ≤ Ei(zsi) < 0 for all i ∈ N, (7.30)
where zsi ∈ W ηi come from the proof of Theorem 7.7, see (7.18).Step 3. Let θii be a sequence with negative terms such that limi→∞ θi =
0. On account of (7.30), up to a subsequence, we may assume that
θi < Ei(u0i ) ≤ Ei(zsi) < θi+1. (7.31)
Let
λ′i =(p + 1)(θi+1 − Ei(zsi))
‖a‖L1 + 1and λ′′i =
(p + 1)(Ei(u0i )− θi)
‖a‖L1 + 1, i ∈ N.
Fix k ∈ N. On account of (7.31),
λ0k = min(λ1, ..., λk, λ′1, ..., λ
′k, λ′′1 , ..., λ′′k) > 0.

208 Competition Phenomena in Dirichlet Problems
Then, for every i ∈ 1, ..., k and λ ∈ [−λ0k, λ0
k] we have
Ei,λ(u0i,λ) ≤ Ei,λ(zsi
) (see (7.27))
=12‖zsi
‖2H10− λ
p + 1
∫
Ω
a(x)zp+1si
−∫
Ω
F (zsi(x))dx
= Ei(zsi)− λ
p + 1
∫
Ω
a(x)zp+1si
< θi+1, (see the choice of λ′i and si ≤ δi <1)
and taking into account that u0i,λ belongs to W ηi , and u0
i is the minimumpoint of Ei over the set W ηi , see relation (7.30), we have
Ei,λ(u0i,λ) = Ei(u0
i,λ)− λ
p + 1
∫
Ω
a(x)(u0i,λ)p+1
≥ Ei(u0i )−
λ
p + 1
∫
Ω
a(x)(u0i,λ)p+1
> θi. (see the choice of λ′′i and (7.28))
In conclusion, for every for every i ∈ 1, ..., k and λ ∈ [−λ0k, λ0
k] we have
θi < Ei,λ(u0i,λ) < θi+1 < 0,
thus
E1,λ(u01,λ) < ... < Ek,λ(u0
k,λ) < 0.
But, u0i,λ ∈ W η1 for every i ∈ 1, ..., k, so Ei,λ(u0
i,λ) = E1,λ(u0i,λ), see
relation (7.25). Therefore, from above, we obtain that for every λ ∈[−λ0
k, λ0k],
E1,λ(u01,λ) < ... < E1,λ(u0
k,λ) < 0 = E1,λ(0).
These inequalities show that the elements u01,λ, ..., u0
k,λ are distinct (andnon-trivial) whenever λ ∈ [−λ0
k, λ0k].
Step 4. It remains to prove conclusion (7.2). The former relationfollows directly by (7.28) and (7.23). To check the latter, we observethat for every i ∈ 1, ..., k and λ ∈ [−λ0
k, λ0k],
E1,λ(u0i,λ) = Ei,λ(u0
i,λ) < θi+1 < 0.

7.5 Nonlinearities with oscillation at infinity 209
Consequently, for every i ∈ 1, ..., k and λ ∈ [−λ0k, λ0
k], by a mean valuetheorem we obtain
12‖u0
i,λ‖2H10
<λ
p + 1
∫
Ω
a(x)(u0i,λ)p+1 +
∫
Ω
F (u0i,λ(x))dx
≤[
1p + 1
‖a‖L1 + m(Ω) maxs∈[0,1]
|f(s)|]
δi (see (7.28) and δi, λ0k ≤ 1)
< 2−1i−2, (see (7.23))
which concludes the proof of Theorem 7.2. ¤
7.5 Nonlinearities with oscillation at infinity
In order to prove Theorems 7.3 and 7.4 we follow more or less the tech-nique of the previous Section. However, for completeness, we give all thedetails. We consider again the problem (PK
h ), where the Caratheodoryfunction h : Ω× [0,∞) → R fulfills
(H∞0 ): h(x, 0) = 0 for a.e. x ∈ Ω, and for every s ≥ 0,
supt∈[0,s]
|h(·, t)| ∈ L∞(Ω);
(H∞1 ): −∞ < lim infs→∞H(x,s)
s2 and lim sups→∞H(x,s)
s2 = +∞ uniformlyfor a.e. x ∈ Ω; here, H(x, s) =
∫ s
0h(x, t)dt;
(H∞2 ): there are two sequences δi, ηi with 0 < δi < ηi < δi+1,limi→∞ δi = +∞, and h(x, s) ≤ 0 for a.e. x ∈ Ω and for everys ∈ [δi, ηi], i ∈ N.
Theorem 7.8 Assume (HK), (H∞0 ), (H∞1 ) and (H∞2 ) hold. Then thereexists a sequence u∞i i ⊂ H1
0 (Ω) of distinct weak solutions of problem(PK
h ) such that
limi→∞
‖u∞i ‖L∞ = ∞. (7.32)
Proof. For any i ∈ N, we introduce the truncation function hi :Ω× [0,∞) → R by
hi(x, s) = h(x, τηi(s)). (7.33)
Let Ei : H10 (Ω) → R be the energy functional associated with problem
(PKhi
). As before, let Hi(x, s) =∫ s
0hi(x, t)dt.

210 Competition Phenomena in Dirichlet Problems
On account of hypotheses (H∞0 ) and (H∞2 ), hi fulfills the assumptionsof Theorem 7.6 for every i ∈ N with [δi, ηi]. Thus, for every i ∈ N, thereis an element u∞i ∈ W ηi such that
u∞i is the minimum point of the functional Ei on W ηi , (7.34)
u∞i (x) ∈ [0, δi] for a.e. x ∈ Ω, (7.35)
u∞i is a weak solution of (PKhi
). (7.36)
Due to (7.36), (7.33) and (7.35), u∞i is also a weak solution to problem(PK
h ).
We prove that there are infinitely many distinct elements in the se-quence u∞i i. To this end, it is enough to show that
limi→∞
Ei(u∞i ) = −∞. (7.37)
Indeed, let us assume that in the sequence u∞i i there are only finitelymany distinct elements, say u∞1 , ..., u∞i0 for some i0 ∈ N. Consequently,due to (7.33), the sequence Ei(u∞i )i reduces to at most the finite setEi0(u
∞1 ), ..., Ei0(u
∞i0
), which contradicts relation (7.37).
Now, we prove (7.37). By (H∞1 ), there exist lh∞ > 0 and ζ > 0 suchthat
essinfx∈ΩH(x, s) ≥ −lh∞s2 for all s > ζ. (7.38)
Fix Lh∞ > 0 large enough such that
12C(r,N) +
(12‖K‖L∞ + lh∞
)m(Ω) < Lh
∞(r/2)NωN , (7.39)
where r > 0 and C(r,N) > 0 are from (7.7). Due to the right hand sideof (H∞1 ), one can fix a sequence sii ⊂ (0,∞) such that limi→∞ si = ∞,and
essinfx∈ΩH(x, si) > Lh∞s2
i for all i ∈ N. (7.40)
Since limi→∞ δi = ∞, see (H∞2 ), we can choose a subsequence δmii
of δii such that si ≤ δmi for all i ∈ N. Let i ∈ N be fixed andlet zsi ∈ H1
0 (Ω) be the function from (7.6) corresponding to the valuesi > 0. Then zsi ∈ W ηmi , and on account of (7.7), (7.40) and (7.38), we

7.5 Nonlinearities with oscillation at infinity 211
have
Emi(zsi) =12‖zsi‖2H1
0+
12
∫
Ω
K(x)z2si−
∫
Ω
Hmi(x, zsi(x))dx
=12C(r,N)s2
i +12
∫
Ω
K(x)z2si−
∫
B(x0,r/2)
H(x, si)dx
−∫
(B(x0,r)\B(x0,r/2))∩zsi>ζ
H(x, zsi(x))dx
−∫
(B(x0,r)\B(x0,r/2))∩zsi≤ζ
H(x, zsi(x))dx
≤[12C(r,N) +
12‖K‖L∞m(Ω)− Lh
∞(r/2)NωN + lh∞m(Ω)]
s2i
+‖ sups∈[0,ζ]
|h(·, s)|‖L∞m(Ω)ζ.
The above estimate, relation (7.39) and limi→∞ si = ∞ clearly showthat
limi→∞
Emi(zsi) = −∞. (7.41)
On the other hand, using (7.34), we have
Emi(u∞mi
) = minW ηmi
Emi ≤ Emi(zsi). (7.42)
Therefore, on account of (7.41), we have
limi→∞
Emi(u∞mi
) = −∞. (7.43)
Note that the sequence Ei(u∞i )i is non-increasing. Indeed, let i, k ∈ N,i < k. Then, due to (7.33), we have
Ei(u∞i ) = minW ηi
Ei = minW ηi
Ek ≥ minW ηk
Ek = Ek(u∞k ).
Combining this fact with (7.43), we obtain (7.37).Now, we prove (7.32). Arguing by contradiction assume there exists a
subsequence u∞kii of u∞i i such that for all i ∈ N, we have ‖u∞ki
‖L∞ ≤M for some M > 0. In particular, u∞ki
i ⊂ W ηl for some l ∈ N. Thus,for every ki ≥ l, we have
El(u∞l ) = minW ηl
El = minW ηl
Eki
≥ minW
ηki
Eki = Eki(u∞ki
)
≥ minW ηl
Eki (cf. hypothesis, u∞ki∈ W ηl)
= El(u∞l ).

212 Competition Phenomena in Dirichlet Problems
As a consequence,
Eki(u∞ki
) = El(u∞l ) for all i ∈ N. (7.44)
Since the sequence Ei(u∞i )i is non-increasing, on account of (7.44),one can find a number i0 ∈ N such that Ei(u∞i ) = El(u∞l ) for all i ≥ i0.
This fact contradicts (7.37), which concludes the proof of Theorem 7.8.¤
Proof of Theorem 7.3. (i) Case p = 1. Let us fix λ ∈ R as in thehypothesis, i.e., λa(x) < λ∞ a.e. x ∈ Ω for some 0 < λ∞ < −l∞. Fixalso λ∞ ∈ (λ∞,−l∞) and let
K(x) = λ∞−λa(x) and h(x, s) = λ∞s+f(s) for all (x, s) ∈ Ω× [0,∞).(7.45)
It is clear that essinfΩK ≥ λ∞ − λ∞ > 0, so (HK) is satisfied. Sincef(0) = 0, (H∞0 ) holds too. Note that H(x, s)/s2 = λ∞/2 + F (s)/s2,s > 0; thus, hypothesis (f∞1 ) implies (H∞1 ). Since l∞ < −λ∞, there isa sequence sii ⊂ (0,∞) converging to +∞ such that f(si)/si < −λ∞for all i ∈ N. By using the continuity of f , we may fix two sequencesδii, ηii ⊂ (0,∞) such that 0 < δi < si < ηi < δi+1, limi→∞ δi = ∞,
and λ∞s+f(s) ≤ 0 for all s ∈ [δi, ηi] and i ∈ N. Therefore, (H∞2 ) is alsofulfilled. Now, we are in the position to apply Theorem 7.8. Throughoutthe choice (7.45), (PK
h ) is equivalent to problem (Pλ) which concludesthe proof.
(ii) Case p < 1. Let λ ∈ R be fixed arbitrarily and fix also a numberλ∞ ∈ (0,−l∞). Now, let us choose
K(x) = λ∞ and h(x, s) = λa(x)sp+λ∞s+f(s) for all (x, s) ∈ Ω×[0,∞).(7.46)
Hypothesis (HK) is clearly satisfied. Due to the fact that a ∈ L∞(Ω),hypothesis (H∞0 ) holds too. Since p < 1 and H(x, s)/s2 = λa(x)sp−1/(p+1) + λ∞/2 + F (s)/s2, s > 0, hypothesis (f∞1 ) implies (H∞1 ). For a.e.x ∈ Ω and every s ∈ [0,∞), we have
h(x, s) ≤ |λ| · ‖a‖L∞sp + λ∞s + f(s) ≡ h∞(s). (7.47)
Thanks to (f∞2 ), we have
lim infs→∞
h∞(s)s
= λ∞ + l∞ < 0.
Therefore, one can fix a sequence sii ⊂ (0,∞) converging to +∞ suchthat h∞(si) < 0 for all i ∈ N. Now, by using the continuity of h∞, one

7.5 Nonlinearities with oscillation at infinity 213
can fix two sequences δii, ηii ⊂ (0,∞) such that 0 < δi < si < ηi <
δi+1, limi→∞ δi = ∞, and h∞(s) ≤ 0 for all s ∈ [δi, ηi] and i ∈ N. Thus,by using (7.47), hypothesis (H∞2 ) holds. Now, we can apply Theorem7.8, observing that problem (PK
h ) is equivalent to problem (Pλ) throughthe choice (7.46). Finally, in both cases (i.e., (i) and (ii)), (7.32) impliesrelation (7.3). This concludes the proof of Theorem 7.3. ¤
Proof of Remark 7.4. Assume that (7.4) holds. By contradiction, letus assume that there exists a bounded subsequence u∞ki
i of u∞i i inH1
0 (Ω). Since H10 (Ω) is continuously embedded into Lt(Ω), t ∈ [1, 2∗],
after an elementary estimate, we obtain that the sequence Eki(u∞ki
)i
is bounded. Since the sequence Ei(u∞i )i is non-increasing, it will bebounded as well, which contradicts (7.37). ¤
Proof of Theorem 7.4. The proof is divided into five steps.Step 1. Let λ∞ ∈ (0,−l∞). Due to (f∞1 ), we may fix a sequence
sii ⊂ (0,∞) converging to ∞, such that f(si)/si < −λ∞. For everyλ ∈ R, let us define two functions hλ : Ω× R→ R and h : R2 → R by
hλ(x, s) = λa(x)sp + λ∞s + f(s) for all (x, s) ∈ Ω× [0,∞);
h(λ, s) = |λ| · ‖a‖L∞sp + λ∞s + f(s) for all s ∈ [0,∞).
Note that h(0, si) = λ∞si + f(si) < 0. Due to the continuity of h, wecan fix three sequences δii, ηii ⊂ (0,∞) and λii ⊂ (0, 1) such that0 < δi < si < ηi < δi+1, limi→∞ δi = ∞, and for every i ∈ N,
h(λ, s) ≤ 0 for all λ ∈ [−λi, λi] and s ∈ [δi, ηi]. (7.48)
Without any loss of generality, we may assume that
δi ≥ i, i ∈ N. (7.49)
Note that hλ(x, s) ≤ h(λ, s) for a.e. x ∈ Ω and all (λ, s) ∈ R × [0,∞).Taking into account of (7.48), for every i ∈ N, we have
hλ(x, s) ≤ 0 for a.e. x ∈ Ω and all λ ∈ [−λi, λi], s ∈ [δi, ηi]. (7.50)
For any i ∈ N and λ ∈ [−λi, λi], let hλi : Ω× [0,∞) → R be defined by
hλi (x, s) = hλ(x, τηi(s)) (7.51)
and K(x) = λ∞. Let Ei,λ : H10 (Ω) → R be the energy functional asso-
ciated with the problem (PKhλ
i), which is formally the same as in (7.26).
Note that for every i ∈ N and λ ∈ [−λi, λi], the function hλi fulfills the

214 Competition Phenomena in Dirichlet Problems
hypotheses of Theorem 7.6; see (7.50) for (H2hλ
i). Consequently, for every
i ∈ N and λ ∈ [−λi, λi]
there exists u∞i,λ ∈ W ηi with Ei,λ(u∞i,λ) = minW ηi
Ei,λ; (7.52)
u∞i,λ(x) ∈ [0, δi] for a.e. x ∈ Ω, (7.53)
u∞i,λ is a weak solution of (PKhλ
i). (7.54)
On account of the definition of the functions hλi and K, and relations
(7.54) and (7.53), u∞i,λ is also a weak solution for our initial problem (Pλ)once we have u∞i,λ 6≡ 0.
Step 2. Note that for λ = 0, the function hλi = h0
i verifies the hy-potheses of Theorem 7.8; in fact, h0
i is the function appearing in (7.33)and Ei := Ei,0 is the energy functional associated with problem (PK
h0i).
Denoting u∞i := u∞i,0, we also have
Emi(u∞mi
) = minW ηmi
Emi ≤ Emi(zsi); (7.55)
limi→∞
Emi(u∞mi
) = −∞, (7.56)
where the special subsequence u∞mii of u∞i i and zsi ∈ W ηmi appear
in the proof of Theorem 7.8, see relations (7.42) and (7.43), respectively.Step 3. Let us fix a sequence θii with negative terms such that
limi→∞ θi = −∞. Due to (7.55) and (7.56), up to a subsequence, wemay assume that
θi+1 < Emi(u∞mi
) ≤ Emi(zsi) < θi. (7.57)
For any i ∈ N, define
λ′i =(p + 1)(θi − Emi(zsi))
δp+1mi (‖a‖L1 + 1)
and λ′′i =(p + 1)(Emi(u
∞mi
)− θi+1)
δp+1mi (‖a‖L1 + 1)
.
Fix k ∈ N. Thanks to (7.57),
λ∞k = min(λ1, ..., λk, λ′1, ..., λ′k, λ′′1 , ..., λ′′k) > 0.
Therefore, for every i ∈ 1, ..., k and λ ∈ [−λ∞k , λ∞k ] we have
Emi,λ(u∞mi,λ) ≤ Emi,λ(zsi) (see (7.52))
=12‖zsi‖2H1
0− λ
p + 1
∫
Ω
a(x)zp+1si
−∫
Ω
F (zsi(x))dx
= Emi(zsi)−λ
p + 1
∫
Ω
a(x)zp+1si
< θi, (see the choice of λ′i and si ≤ δmi )

7.5 Nonlinearities with oscillation at infinity 215
and since u∞mi,λbelongs to W ηmi , and u∞mi
is the minimum point of Emi
over the set W ηmi , see relation (7.55), we have
Emi,λ(u∞mi,λ) = Emi(u∞mi,λ)− λ
p + 1
∫
Ω
a(x)(u∞mi,λ)p+1
≥ Emi(u∞mi
)− λ
p + 1
∫
Ω
a(x)(u∞mi,λ)p+1
> θi+1. (see the choice of λ′′i and (7.53))
Consequently, for every i ∈ 1, ..., k and λ ∈ [−λ∞k , λ∞k ] we have
θi+1 < Emi,λ(u∞mi,λ) < θi < 0, (7.58)
therefore
Emk,λ(u∞mk,λ) < ... < Em1,λ(u∞m1,λ) < 0. (7.59)
Note that u∞mi,λ∈ W ηmk for every i ∈ 1, ..., k, so Emi,λ(u∞mi,λ
) =Emk,λ(u∞mi,λ
), see relation (7.51). From above, for every λ ∈ [−λ∞k , λ∞k ],we have
Emk,λ(u∞mk,λ) < ... < Emk,λ(u∞m1,λ) < 0 = Emk,λ(0).
In particular, the elements u∞m1,λ, ..., u∞mk,λ are distinct (and non-trivial)whenever λ ∈ [−λ∞k , λ∞k ].
Step 4. Assume that k ≥ 2 and fix λ ∈ [−λ∞k , λ∞k ]. We prove that
‖u∞mi,λ‖L∞ > δmi−1 for all i ∈ 2, ..., k. (7.60)
Let us assume that there exists an element i0 ∈ 2, ..., k such that‖u∞mi0 ,λ‖L∞ ≤ δmi0−1 . Since δmi0−1 < ηmi0−1 , then u∞mi0 ,λ ∈ W
ηmi0−1 .
Thus, on account of (7.52) and (7.51), we have
Emi0−1,λ(u∞mi0−1,λ) = minW
ηmi0−1Emi0−1,λ ≤ Emi0−1,λ(u∞mi0 ,λ) = Emi0 ,λ(u∞mi0 ,λ),
which contradicts (7.59). Therefore, (7.60) holds true.Step 5. Let u∞i,λ := u∞mi,λ
for any i ∈ 1, ..., k and λ ∈ [−λ∞k , λ∞k ];these elements verify all the requirements of Theorem 7.4. Indeed, sinceEm1,λ(u∞1,λ) = Em1,λ(u∞m1,λ) < 0 = Em1,λ(0), then ‖u∞1,λ‖L∞ > 0, whichproves (7.5) for i = 1. If k ≥ 2, then on account of Step 4, (7.49) andmi ≥ i, for every i ∈ 2, ..., k, we have
‖u∞i,λ‖L∞ > δmi−1 ≥ mi−1 ≥ i− 1,
i.e., relation (7.5) holds true. This ends the proof of Theorem 7.4. ¤

216 Competition Phenomena in Dirichlet Problems
Proof of Remark 7.6. Due to (7.4), there exists a C > 0 such that|f(s)| ≤ C(1 + s2∗−1) for all s ≥ 0. We denote by St > 0 the Sobolevembedding constant of the continuous embedding H1
0 (Ω) → Lt(Ω), t ∈[1, 2∗]. Without any loss of generality, we may assume that for everyi ∈ N,
θi < − 1p + 1
‖a‖L∞Sp+1p+1(i− 1)p+1 −C[S1(i− 1) + S2∗
2∗ (i− 1)2∗], (7.61)
where the sequence θii comes from Step 3 of the proof of Theorem7.4.
Fix λ ∈ [−λ∞k , λ∞k ] and assume that there exists i0 ∈ 1, ..., k suchthat ‖u∞i0,λ‖H1
0≤ i0 − 1. On account of (7.58), we have in particular
Emi0 ,λ(u∞i0,λ) < θi0 . Consequently, we have
12‖u∞i0,λ‖2H1
0= Emi0 ,λ(u∞i0,λ) +
λ
p + 1
∫
Ω
a(x)(u∞i0,λ)p+1 +∫
Ω
F (u∞i0,λ(x))dx
< θi0 +|λ|
p + 1‖a‖L∞Sp+1
p+1‖u∞i0,λ‖p+1H1
0
+C[S1‖u∞i0,λ‖H10
+ S2∗2∗ ‖u∞i0,λ‖2
∗H1
0]
≤ θi0 +1
p + 1‖a‖L∞Sp+1
p+1(i0 − 1)p+1
+C[S1(i0 − 1) + S2∗2∗ (i0 − 1)2
∗] (λ∞k ≤ 1)
< 0, (see (7.61))
contradiction. ¤
7.6 Perturbation from symmetry
For details related to the main notions and properties used in this sectionwe refer to Appendix D.
Let Ω ⊂ RN be a bounded open set. For some fixed r > 0, considerthe following nonlinear eigenvalue problem: find (u, λ) ∈ H1
0 (Ω) × Rsuch that
f(x, u) ∈ L1loc(Ω) ,
−∆u = λf(x, u) in Ω ,∫
Ω
|∇u|2dx = r2 ,
(7.62)
where f : Ω×R→ R is a Caratheodory function such that the followingconditions hold:
(f1) f(x,−s) = −f(x, s), for a.e. x ∈ Ω and every s ∈ R;

7.6 Perturbation from symmetry 217
(f2) there exist a ∈ L1(Ω), b ∈ R and 0 ≤ p < 2NN−2 (if N > 2) such
that
0 < sf(x, s) ≤ a(x) + b|s|p , F (x, s) ≤ a(x) + b|s|p ,
for a.e. x ∈ Ω and every s ∈ R\0, where F (x, s) =∫ s
0f(x, t)dt;
(f3) sup|s|≤t
|f(x, s)| ∈ L1loc(Ω), for every t > 0.
We point out that if N = 1, then in condition (f2) the term b|s|p canbe substituted by any continuous function ϕ(s) of s, while, if N = 2,the same term can be substituted by exp(ϕ(s)), with ϕ(s)s−2 → 0 as|s| → ∞.
Our first result in this section is the following.
Theorem 7.9 Assume that hypotheses (f1)− (f3) hold. Then problem(7.62) admits a sequence (±un, λn) of distinct solutions.
Our main purpose is to study what happens when the energy func-tional is affected by an arbitrary perturbation which destroys the sym-metry.
Consider the problem: find (u, λ) ∈ H10 (Ω)× R such that
f(x, u), g(x, u) ∈ L1loc(Ω) ,
−∆u = λ (f(x, u) + g(x, u)) in Ω ,∫
Ω
|∇u|2dx = r2 ,
(7.63)
where g : Ω×R→ R is a Caratheodory function. We make no symmetryassumption on g, but we impose only
(g1) 0 < sg(x, s) ≤ a(x) + b|s|p for a.e. x ∈ Ω and every s ∈ R \ 0;(g2) sup
|s|≤t
|g(x, s)| ∈ L1loc(Ω), for every t > 0;
(g3) G(x, s) ≤ Cg (1 + |s|p), for a.e. x ∈ Ω and every s ∈ R, for someCg > 0, where G(x, s) =
∫ s
0g(x, t)dt.
The next result shows that the number of solutions of problem (7.63)becomes greater and greater, as the perturbation tends to zero.
Theorem 7.10 Assume that hypotheses (f1)−(f3) and (g1)−(g3) hold.Then, for every positive integer n, there exists εn > 0 such that problem(7.63) admits at least n distinct solutions, provided that (g3) holds forCg = εn.

218 Competition Phenomena in Dirichlet Problems
We prove theorems 7.9 and 7.10 by a variational argument. First weset
Sr =
u ∈ H10 (Ω) :
∫
Ω
|∇u|2dx = r2
and we study the critical points on Sr of the even continuous functionalI : H1
0 (Ω) → R defined by
I(u) = −∫
Ω
F (x, u)dx .
We point out that if conditions (f2), (f3) are substituted by the morestandard condition 0 < sf(x, s) ≤ a1(x)|s| + b|s|p with a1 ∈ L
2NN+2 (Ω),
then I is of class C1 and Theorem 7.9 can be found in [249, Theorem8.17]. Under our assumptions, f could have the form f(x, s) = α(x)γ(s)with α ∈ L1(Ω), α ≥ 0, γ ∈ Cc(R), γ odd and sγ(s) ≥ 0 for any s ∈ R.In such a case, I is clearly continuous, but not locally Lipschitz.
When f and g are subjected to the standard condition we have men-tioned, results like Theorem 7.10 go back to Krasnoselskii [161]. For per-turbation results, quite different from ours, where the perturbed problemstill has infinitely many solutions, we refer the reader to [249, 280]. In anonsmooth setting, a result in the line of Theorem 7.10 has been provedin [81] when f and g satisfy the standard condition, but the function u
is subjected to an obstacle, so that the equation becomes a variationalinequality.
We first observe that from our assumption (f2) it follows that I(u) < 0and sup Ir(u) = 0, where Ir = I|Sr
.We start with the following preliminary result.
Lemma 7.1 The following properties hold true:
(a) if u ∈ Sr satisfies |dIr|(u) < +∞, then f(x, u) ∈ L1loc(Ω) ∩H−1(Ω)
and there exists µ ∈ R such that
‖µ∆u + f(x, u)‖H−1 ≤ |dIr|(u) ;
(b) the functional Ir satisfies (PS)c for any c < 0;(c) if u ∈ Sr is a critical point of Ir, then there exists λ > 0 such that
(u, λ) is a solution of problem (7.62).

7.6 Perturbation from symmetry 219
Proof (a) Set
Ir,est(w) =
I(w) if w ∈ Sr ,
+∞ if w ∈ H10 (Ω) \ Sr .
Then |dIr,est|(u) = |dIr|(u). We also deduce that there exists α ∈∂Ir,est(u) with ‖α‖H−1 ≤ |dIr,est|(u), where ∂ stands for the general-ized gradient of Ir,est. Taking into account (f2), we obtain
I0(u; 0) ≤ 0 , I0(u; 2u) ≤ −2∫
Ω
f(x, u)udx < +∞ .
Actually, the same proof shows a stronger fact, namely that
I0(u; 0) ≤ 0 , I
0(u; 2u) ≤ −2
∫
Ω
f(x, u)udx < +∞ .
Thus, there are β ∈ ∂I(u) and µ ∈ R such that α = β − µ∆u. Weconclude that f(x, u) ∈ L1
loc(Ω) ∩H−1(Ω) and β = −f(x, u). Then (a)follows.
(b) Let c < 0 and let (un) be a (PS)c–sequence for Ir. By the previouspoint, we have f(x, un) ∈ L1
loc(Ω)∩H−1(Ω) and there exists a sequence(µn) in R with
‖µn∆un + f(x, un)‖H−1 → 0 .
Up to a subsequence, (un) is convergent to some u weakly in H10 (Ω) and
a.e. From (f2) it follows I(u) = c < 0, hence u 6= 0. Again by (f2) andLebesgue’s dominated convergence theorem, we deduce that
0 <
∫
Ω
f(x, u)udx = limn
∫
Ω
f(x, un)undx = limn
µn
∫
Ω
|∇un|2dx .
Therefore, up to a further subsequence, (µn) is convergent to some µ > 0and ∥∥∥∥∆un +
1µ
f(x, un)∥∥∥∥
H−1
→ 0 .
This shows that (un) is precompact in H10 (Ω) and (b) follows.
(c) Arguing as in (b), we find that f(x, u) ∈ L1loc(Ω) ∩ H−1(Ω) and
that there exists µ > 0 with µ∆u + f(x, u) = 0. This concludes theproof.
Lemma 7.2 There exists a sequence (bn) of essential values of Ir strictlyincreasing to 0.

220 Competition Phenomena in Dirichlet Problems
Proof Let ψ :] − ∞, 0[→ R be an increasing diffeomorphism. FromLemma 7.1 it follows that ψ Ir satisfies condition (PS)c for everyc ∈ R. Then the set u ∈ Sr : ψ Ir(u) ≤ b has finite genus for everyb ∈ R. For any integer n ≥ 1, set
cn := infS∈Γn
supu∈S
ψ Ir(u) ,
where Γn := S|subsetSr; S ∈ F , γ(S) ≥ n and F denotes the familyof closed and symmetric subsets of Sr with respect to the origin. Sincecn → +∞ as n → ∞, it follows that there exists a sequence (b′n) ofessential values of ψ Ir strictly increasing to +∞. Then bn = ψ−1(b′n)has the required properties.
Proof of Theorem 7.9. Using Lemma 7.1, we deduce that each bn is acritical value of Ir. Again from Lemma 7.1, we conclude that there existsa sequence (±un, λn) of solutions of problem (7.62) with I(un) = bn
strictly increasing to 0. This concludes the proof of Theorem 7.9.
Let us now introduce the continuous functional Jr : Sr → R definedby
J(u) = I(u)−∫
Ω
G(x, u)dx .
Lemma 7.3 For every η > 0, there exists ε > 0 such that supu∈Sr
|Ir(u)−Jr(u)| < η, provided that (g3) holds for Cg = ε.
Proof By Sobolev inclusions, we have for any u ∈ Sr,
0 ≤ Ir(u)− Jr(u) =∫
Ω
G(x, u)dx ≤ Cg
∫
Ω
(1 + |u|p)dx < η ,
if g is chosen as in the hypothesis.
Proof of Theorem 7.10. As in the proof of Theorem 7.9, let us considera strictly increasing sequence (bn) of essential values of Ir such thatbn → 0 as n → ∞. Given n ≥ 1, take some δ > 0 with bn + δ < 0and 2(bj − bj−1) < δ for j = 2, . . . , n. Thus, for any j = 1, . . . , n, thereexists ηj > 0 such that sup
u∈Sr
|Ir(u)− Jr(u)| < ηj implies the existence of
an essential value cj ∈]bj − δ, bj + δ[ of Jr. We now apply Lemma 7.3for η = minη1, . . . , ηn. Thus we obtain εn > 0 such that sup
u∈Sr
|Ir(u)−

7.7 Historical notes, comments 221
Jr(u)| < η, if (g3) holds with Cg = εn. It follows that Jr has at least n
distinct essential values c1, . . . , cn in the interval ]−∞, 0[.Now Lemma 1 can be clearly adapted to the functional Jr. Then we
find u1, . . . , un ∈ Sr and λ1, . . . , λn > 0 such that each (uj , λj) is asolution of Problem (7.62) with Jr(uj) = cj .
7.7 Historical notes, comments
A. Historical notes. Let us consider the equation
−4u = f(x, u) + λg(x, u) in Ω,
u = 0 on ∂Ω,(Eλ)
where Ω ⊆ RN is a bounded open domain, while f, g : Ω × R → R areCaratheodory functions. We assume the unperturbed equation (E0) hasinfinitely many distinct solutions. Then, the main question is:
(q) Fixing k ∈ N, can one find a number λk > 0 such that the per-turbed equation (Eλ) has at least k distinct solutions wheneverλ ∈ [−λk, λk]?
Two different classes of results are available in the literature answeringaffirmatively question (q):
1) Perturbation of symmetric problems. Assume f(x, s) = −f(x,−s)for every (x, s) ∈ Ω × R. It is well-known that if the energy functionalhas the mountain pass geometry, problem (E0) has infinitely many so-lutions, due to the symmetric version of the Mountain Pass theorem,see Ambrosetti-Rabinowitz [7]. Furthermore, question (q) was fully an-swered by Li-Liu [186] for arbitrarily continuous nonlinearity g, followingthe topological approach developed by Degiovanni-Lancelotti [81] andDegiovanni-Radulescu [85];
2) Perturbation of oscillatory problems. Assume f(x, ·) oscillates nearthe origin or at infinity, uniformly with respect to x ∈ Ω. Special kindsof oscillations produce infinitely many solutions for (E0), as shown byOmari-Zanolin [229], and Saint Raymond [265]. Concerning the per-turbed problem, Anello-Cordaro [12] answered question (q), by usingTheorem 1.17.
B. Comments. In this chapter we presented a third, direct method foranswering question (q) whenever the nonlinear term f(x, ·) belongs to awide class of oscillatory functions and g(x, s) = sp. We fully described

222 Competition Phenomena in Dirichlet Problems
the effect of the term g to the oscillatory function f . Namely, the numberof distinct solutions of (Eλ) is sensitive when:• p ≤ 1 and f oscillates near the origin;• p ≥ 1 and f oscillates at infinity.
Notice that g can be any continuous function with g(x, 0) = 0, and ourmethod works also for other elliptic problems.

8
Problems to Part I
I hope that seeing theexcitement of solving thisproblem will make youngmathematicians realize thatthere are lots and lots of otherproblems in mathematicswhich are going to be just aschallenging in the future.
Andrew Wiles (b. 1953)
Problem 8.1 Show that any function f : R→ R of class C1 having twolocal minima has necessarily a third critical point.
Problem 8.2 Show that the (PS)c-condition implies the (C)c-conditionfor any function f : X → R of class C1 and c ∈ R, see Remark 1.3.Construct a function which shows that the converse does not hold ingeneral.
Problem 8.3 Prove that every function f : T 2 → R of class C1 has atleast 3 critical points. Here T 2 = S1 × S1 is the 2-dimensional torus.[Hint: Prove that cat(T 2) = 3 and apply Theorem 1.9.]
Problem 8.4 Let X be a real Banach space and assume that f is anonnegative C1 function on X satisfying the Palais–Smale condition oreven a weaker form: every sequence (un) in X such that supn f(un) < ∞and ‖f ′(un)‖→0, is bounded in X. Prove that f is coercive, that is,
f(u)→+∞ as ‖u‖→∞.
223

224 Problems to Part I
Problem 8.5 Let X be a real Banach space and assume that f isa nonnegative C1 function on X satisfying the Palais–Smale condition.Prove that every minimizing sequence of f has a convergent subsequence.
Problem 8.6 Let X be a real Banach space and assume that f is a C1
function on X which is bounded below and satisfies the Palais–Smalecondition. Suppose that all the critical points of f lie in u ∈ X; ‖u‖ <
R. Set
M(r) = inff(u); ‖u‖ = r .
Prove that for r > R, M(r) is strictly increasing and continuous fromthe right.
Problem 8.7 Let Ω be a bounded open set in RN . For every f ∈ L2(Ω)and all λ ∈ R, define the functional
Eλ(u) =12
∫
Ω
(|∇u|2 − λu2)
dx−∫
Ω
fu dx , u ∈ H10 (Ω) .
a) Prove that if λ is not an eigenvalue of (−∆) in H10 (Ω), then Eλ
satisfies the Palais–Smale condition in H10 (Ω).
b) Prove that if λ is an eigenvalue of (−∆) in H10 (Ω) and if f = 0,
then Eλ does not satisfy the Palais–Smale condition in H10 (Ω).
Problem 8.8 Let X be a real Banach space and let U be an open subsetof X. Let Φ be a real C1 bounded below function on U . Set
a = infU
Φ .
Assume F is a closed subset of U such that dist (F, ∂U) > 0 (no assump-tion if U = X) and
a = infF
Φ .
Prove that there exists a sequence (xn) in U such that
Φ(xn)→a, Φ′(xn)→0 in X∗ and dist (xn, F )→0.
Problem 8.9 In Theorem 1.3, instead of the assumption that f isbounded from below, assume that
f(x) + ϕ(d(x, x0)) ≥ 0 for every x ∈ X,
for some x0 ∈ X and some function ϕ(t) = o(t) as t→+∞. Prove thatthe conclusion of Theorem 1.3 still holds.

Problems to Part I 225
Problem 8.10 (Caristi’s fixed point theorem). Let (X, d) be a completemetric space and let f : X → X be a function. Assume that Ψ : X→Ris a lower semicontinuous function such that
d(x, f(x)) ≤ Ψ(x)−Ψ(f(x)) for all x ∈ X.
Prove that f has a fixed point.
Problem 8.11 Let Φ be a C1 function on RN such that
m = lim inf‖x‖→∞
Φ(x) is finite.
Prove that there exists a sequence of points (xm) in RN such that‖xm‖→∞, Φ(xm)→m, ‖Φ′(xm)‖→0 and Φ′(xm) is parallel to xm (Φ′(xm)may be zero).
Problem 8.12 Let X be a real Banach space and assume that f : X →R is a function of class C1 such that
inf‖u−e0‖=ρ
f(u) ≥ α > maxf(e0), f(e1)
for some α ∈ R and e0 6= e1 ∈ X with 0 < ρ < ‖e0 − e1‖. Set
c = infγ∈Γ
maxt∈[0,1]
f(γ(t)),
where
Γ = γ ∈ C([0, 1], X) : γ(0) = e0, γ(1) = e1 .
Prove that the conclusion of Theorem 1.7 can be strengthened asfollows: there exists a sequence (un) in X such that f(un)→c and (1 +‖un‖) ‖f ′(un)‖→0 as n→∞.
Problem 8.13 Prove the same result if (1+‖u‖) is replaced by ϕ(‖u‖),where ϕ ≥ 1 and
∫∞0
dtϕ(t) = +∞.
Problem 8.14 Let X be a real Banach space and assume that f, g :X → R are functions of class C1 satisfying the Palais–Smale conditionwith f ≥ g on X. Let K be a compact metric space and let K∗ be anonempty closed subset of K, K∗ 6= K. Define
P = p ∈ C(K, X); p = p∗ on K∗ ,
where p∗ is a fixed continuous map on K. Assume that
c = infp∈P
maxt∈K
f(p(t)) = infp∈P
maxt∈K
g(p(t)) > infp∈P
maxt∈K∗
f(p∗(t)) .

226 Problems to Part I
Prove that f and g have a common critical point where both functionsequal c.
Problem 8.15 Let Ω ⊂ RN be a bounded domain with smooth bound-ary and assume that p is a real number such that 1 < p < (N+2)/(N−2)if N ≥ 3 and 1 < p < ∞ if N ∈ 1, 2.
Prove that the nonlinear problem
−∆u + u = up in Ωu > 0 in Ωu = 0 on ∂Ω.
has a solution.
Problem 8.16 Establish the same existence result for the problem
−∆u + u = f(x, u) in Ωu > 0 in Ωu = 0 on ∂Ω,
where
f(x, u) = o(|u|(N+2)/(N−2)
)as u→+∞, uniformly in x ∈ Ω.
Problem 8.17 Let Ω ⊂ RN be a bounded domain with smooth bound-ary and assume that f is a C1 function on [0, 1] such that f > 0 on(0, 1) and f(0) = f ′(0) = f(1) = 0. Suppose that u ∈ C1
0 (Ω) satisfies0 < u ≤ 1 in Ω and −∆u ≤ f(u) in Ω.
Consider the nonlinear elliptic problem −∆u = f(u) in Ω
u = 0 on ∂Ω.(8.1)
Prove that if u is not a solution of (8.1), then there are at least twosolutions u1 and u2 of problem (8.1) with 0 < u1 < u2 < 1 in Ω.
Problem 8.18 Let Ω ⊂ RN be a bounded domain with smooth bound-ary, λ ∈ R, and p > 1. For any integer j ≥ 1, set
Γj := A ⊂ H10 (Ω); A is compact, symmetric, 0 6∈ A, γ(A) ≥ j .
Define the functional
E(u) :=12
∫
Ω
[|∇u|2 − λu2]dx− 1p + 1
∫
Ω
|u|p+1 dx , u ∈ H10 (Ω) .

Problems to Part I 227
Prove that
infA∈Γj
maxu∈A
E(u) = −∞ and supA∈Γj
minu∈A
E(u) = +∞ .
Problem 8.19 Let (X, ‖ · ‖) be a real Banach space with ‖ · ‖ of classC1 on X \ 0. Denote by S = v ∈ X | ‖v‖ = 1 the unit sphere andlet J ⊂ R a nonempty open set. Let f : X → R be a function of classC1 on X \ 0. We associate to f a function f : J ×X → R defined by
f(t, v) = f(tv) ,
where (t, v) ∈ J ×S and J ⊂ R is an nonempty set. Let H : R×X → Rbe a C1 function satisfying
〈H ′v, v〉 6= tH ′
t if H(t, v) = c.
If (t, v) ∈ J × X with tv 6= 0 is a critical point of f , then u = tv is acritical point of f .
Problem 8.20 Let (X, ‖ · ‖) be a real Banach space with ‖ · ‖ of classC1 on X \ 0. Denote by S = v ∈ X : ‖v‖ = 1 the unit sphere andlet J ⊂ R a nonempty open set. Let f : X → R be a function of classC1 on X \ 0. Suppose that for all v ∈ S the number
f(v) = maxt∈J
f(tv)
is finite, and f(v) > f(0) if 0 ∈ J . Assume that f : S → R is of classC1. Then to every critical point v ∈ S of f , there correspond a criticalpoint u = tv of f with t ∈ J \ 0 such that f(u) = f(v).

P A R T II
Variational Principles in Geometry

9
Sublinear Problems on Riemann Manifolds
If only I had the theorems!Then I should find the proofseasily enough.
Bernhard Riemann(1826–1866)
In this chapter we are concerned with elliptic problems defined oncompact Riemannian manifolds. This study is motivated by the Emden-Fowler equation arising in Mathematical Physics; after a suitable trans-formation, one obtain a new problem defined on the standard unit sphereSd, d ≥ 3. This problem has been extensively studied in the case whenthe nonlinear term is superlinear and (sub)critical at infinity. Our aimis to complete these results by considering nonlinear terms of sublineartype and oscillatory type.
9.1 Introduction
Consider the parametrized Emden-Fowler equation
(EF)λ −4v = λ|x|α−2K(x/|x|)f(|x|−αv), x ∈ Rd+1 \ 0,where f : R → R is a continuous function, K is smooth on the d-dimensional unit sphere Sd, d ≥ 3, α ∈ R, and λ > 0 is a parameter.The equation (EF)λ has been extensively studied in the pure superlinearcase, i.e., when f has the form f(t) = |t|p−1t, p > 1, see for instanceCotsiolis-Iliopoulos [79], Vazquez-Veron [288]. In these papers, the au-thors obtained existence and multiplicity of solutions for (EF)λ, applyingeither minimization or minimax methods. Note that in the pure super-linear case the presence of the parameter λ > 0 is not relevant due to
229

230 Sublinear Problems on Riemann Manifolds
the rescalling technique. The solutions of (EF)λ are being sought in theparticular form
v(x) = v(|x|, x/|x|) = u(r, σ) = rαu(σ), (9.1)
where (r, σ) ∈ (0,∞) × Sd are the spherical coordinates in Rd+1 \ 0.This type of transformation is also used by Bidaut-Veron-Veron [39],where the asymptotics of a special form of (EF)λ has been studied.Throughout (9.1), the equation (EF)λ reduces to
(9.1)λ −∆hu + α(1− α− d)u = λK(σ)f(u), σ ∈ Sd,
where ∆h denotes the Laplace-Beltrami operator on (Sd, h) and h is thecanonical metric induced from Rd+1.
Note that when α = −d/2 or α = −d/2 + 1, and f(t) = |t| 4d−2 t,
the existence of a smooth solution u > 0 of (9.1)λ can be viewed as anaffirmative answer to the famous Yamabe problem on Sd (see also theNirenberg problem); for these topics we refer the reader to Aubin [19],Cotsiolis-Iliopoulos [78], Hebey[136], and references therein. In thesecases the right hand side of (9.1)λ involves the Sobolev critical exponent.
The purposes of this chapter is to guarantee multiple solutions of(EF)λ for certain λ > 0 when the nonlinearity f : R→ R has a
(i) sublinear growth at infinity; or(ii) oscillatory behaviour near zero or at infinity.
9.2 Existence of two solutions
Since 1− d < α < 0 implies the coercivity of the operator u 7→ −∆hu +α(1 − α − d)u, the form of (9.1)λ motivates the study of the followinggeneral eigenvalue problem, which constitutes the main objective of thissection: Find λ ∈ (0,∞) and u ∈ H2
1 (M) such that
(Pλ) −∆gu + α(σ)u = K(λ, σ)f(u), σ ∈ M,
where we assume
(A1) (M, g) is a smooth compact d-dimensional Riemannian manifoldwithout boundary, d ≥ 3;
(A2) α ∈ C∞(M) and K ∈ C∞((0,∞)×M) are positive functions;(f1) f : R → R is locally Holder continuous and sublinear at infinity,
that is,
lim|s|→∞
f(s)s
= 0. (9.2)

9.2 Existence of two solutions 231
A typical case when (9.2) holds is
(fq,c1 ) There exist q ∈ (0, 1) and c > 0 such that |f(s)| ≤ c|s|q for every
s ∈ R.
As usual, ∆g is the Laplace-Beltrami operator on (M, g); its expressionin local coordinates is ∆gu = gij(∂iju−∂uk
ij∂ku). For every u ∈ C∞(M),set
‖u‖2H2α
=∫
M
〈∇u,∇u〉dσg +∫
M
α(σ)〈u, u〉dσg,
where 〈·, ·〉 is the inner product on covariant tensor fields associated to g,
∇u is the covariant derivative of u, and dσg is the Riemannian measure.The Sobolev space H2
α(M) is defined as the completion of C∞(M) withrespect to the norm ‖ · ‖H2
α. Clearly, H2
α(M) is a Hilbert space endowedwith the inner product
〈u1, u2〉H2α
=∫
M
〈∇u1,∇u2〉dσg+∫
M
α(σ)〈u1, u2〉dσg, u1, u2 ∈ H2α(M).
Since α is positive, the norm ‖ · ‖H2α
is equivalent with the standardnorm ‖ · ‖H2
1; actually, the latter norm is nothing but ‖ · ‖H2
αwith α = 1.
Moreover, we have
min1, minM
α1/2‖u‖H21≤ ‖u‖H2
α≤ max1, ‖α‖1/2
L∞‖u‖H21, u ∈ H2
α(M).
(9.3)
Note that H2α(M) is compactly embedded into Lp(M) for every p ∈
[1, 2d/(d−2)); the Sobolev embedding constant will be denoted by Sp >
0.
The presence of the parameter λ > 0 in (Pλ) is indispensable. Indeed,if we consider a sublinear function at infinity which is, in addition, uni-formly Lipschitz (with Lipschitz constant L > 0), and K(λ, σ) = λK(σ),with K ∈ C∞(M) positive, one can prove that for 0 < λ < 1
LminM αmaxM K :=
λL we have only the u = uλ = 0 solution of (Pλ), as the standard con-traction principle on the Hilbert space H2
1 (M) shows. For a concreteexample, let us consider the function f(s) = ln(1 + s2) and assume thatK(σ)α(σ) = const. = µ0 ∈ (0,∞). Then, for every 0 < λ < minM α
µ0 maxM α , prob-lem (Pλ) has only the trivial solution; however, when λ > 5
4µ0, problem
(Pλ) has three distinct constant solutions which are precisely the fixedpoints of the function s 7→ λµ0 ln(1+ s2). Note that one of the solutionsis the trivial one.

232 Sublinear Problems on Riemann Manifolds
Let λ > 0. The energy functional Eλ : H21 (M) → R associated with
problem (Pλ) is
Eλ(u) =12‖u‖2H2
α−
∫
M
K(λ, σ)F (u(σ))dσg, (9.4)
where F (s) =∫ s
0f(τ)dτ. Due to our initial assumptions (A1), (A2) and
(f1), the functional Eλ is well-defined, it belongs to C1(H21 (M),R), and
its critical points are precisely the weak (so, classical) solutions of prob-lem (Pλ). By (f1), for every ε > 0 sufficiently small there is c(ε) > 0 suchthat |f(s)| ≤ ε|s|+ c(ε) for every s ∈ R. Thus, for every u ∈ H2
1 (M), wehave
Eλ(u) ≥ 12(1− ε‖K(λ, ·)‖L∞S2
2)‖u‖2H2α− c(ε)‖K(λ, ·)‖L∞S1‖u‖H2
α.
Therefore, the functional Eλ is coercive and bounded from below onH2
1 (M). Moreover, it satisfies the standard Palais-Smale condition, seeZeidler [296, Example 38.25].
Our first result concerns the case when f : R→ R fulfills the hypoth-esis
(f2) There exists ν0 > 1 such that lims→0f(s)|s|ν0 = 0.
Before to state this result, let us note that the usual norm on the spaceLp(M) will be denoted by ‖ · ‖p, p ∈ [1,∞].
Theorem 9.1 Assume that f : R→ R fulfills (f1), (f2) and sups∈R F (s) >
0. Assume also that (A1) and (A2) are verified with K(λ, σ) = λK(σ),and K ∈ C∞(M) is positive. Then
(i) for every λ > λ∗ := 12
‖α‖L1
‖K‖L1
(maxs 6=0
F (s)s2
)−1
problem (Pλ) has
at least two distinct, nontrivial solutions u1λ, u2
λ ∈ H21 (M), where
u1λ is the global minimum of the energy functional associated with
(Pλ);(ii) if (fq,c
1 ) holds then ‖u1λ‖H2
1= o(λ
11−r ) for every r ∈ (q, 1), but
‖u1λ‖H2
16= O(λ
11−µ ) for any µ ∈ (1, (d + 2)/(d− 2)) as λ →∞.
A direct consequence of Theorem 9.1 applied for (9.1)λ is the following
Theorem 9.2 Assume that 1− d < α < 0. Let f : R→ R be a functionas in Theorem 9.1 and K ∈ C∞(Sd) positive. Then, for every λ > λ∗
problem (EF)λ has at least two distinct, nontrivial solutions.

9.2 Existence of two solutions 233
Fig. 9.1. The function f(s) = ln(1 + s2).
Example 9.1 Let f(s) = ln(1 + s2), see Figure 9.1. One can applyTheorems 9.1–9.2.
Proof of Theorem 9.1. Due to (9.2) and (f2), the term F (s)/s2 tends to0 as |s| → ∞ and s → 0, respectively. Since there exists s0 ∈ R such thatF (s0) > 0, the number λ∗ is well-defined. Now, fix a number s∗ ∈ R\0such that F (s∗)
(s∗)2 = maxs 6=0F (s)s2 . Therefore, λ∗ = 1
2
‖α‖L1
‖K‖L1
(s∗)2
F (s∗) .
Fix λ > λ∗. Let us first consider the constant function us∗(σ) = s∗,σ ∈ M. One has
Eλ(us∗) =12‖us∗‖2H2
α− λ
∫
M
K(σ)F (us∗(σ))dσg
=12‖α‖L1(s∗)2 − λ‖K‖L1F (s∗) = (λ∗ − λ)‖K‖L1F (s∗)
< 0.
Thus, infH21 (M) Eλ ≤ Eλ(us∗) < 0. Since Eλ verifies the (PS)-condition
and it is bounded from below, one can find u1λ ∈ H2
1 (M) such thatEλ(u1
λ) = infH21 (M) Eλ, see Theorem 1.4. Therefore, u1
λ ∈ H21 (M) is the
first solution of (Pλ) and u1λ 6= 0, since Eλ(0) = 0.
Now, we prove that for every λ > λ∗ the functional Eλ has the standardMountain Pass geometry. First, due to (f1) and (f2), one can fix twonumbers C > 0 and 1 < ν < d+2
d−2 such that
|F (s)| ≤ C|s|ν+1, s ∈ R.
Since ν + 1 < 2dd−2 (thus H2
α(M) → Lν+1(M) is continuous), one has
Eλ(u) ≥ 12‖u‖2H2
α− λC‖K‖L∞Sν+1
ν+1‖u‖ν+1H2
α, u ∈ H2
1 (M). (9.5)

234 Sublinear Problems on Riemann Manifolds
Let us take ρλ > 0 so small such that
ρλ < min
(2λC‖K‖L∞Sν+1ν+1)
11−ν min1, ‖α‖−1/2, |s∗|(Volg(M))1/2
.
Consequently, by (9.5), for every u ∈ H21 (M) complying with ‖u‖H2
1=
ρλ, we have
Eλ(u) ≥(
12− λC‖K‖L∞Sν+1
ν+1‖u‖ν−1H2
α
)‖u‖2H2
α
≥(
12− λC‖K‖L∞Sν+1
ν+1 max1, ‖α‖(ν−1)/2L∞ ρν−1
λ
)min1,min
Mαρ2
λ
≡ η(ρλ) > 0.
By construction, one has ‖us∗‖H21
= |s∗|(Volg(M))1/2 > ρλ and fromabove Eλ(us∗) < 0 = Eλ(0). Since Eλ satisfies the (PS)-condition, onecan apply the mountain pass theorem. Thus, there exists an elementu2
λ ∈ H21 (M) such that E ′λ(u2
λ) = 0 and Eλ(u2λ) ≥ η(ρλ) > 0. In par-
ticular, u2λ 6= 0, and the elements u1
λ and u2λ are distinct. This ends
(i).Now, we assume that (f c,q
1 ) holds. Since Eλ(u1λ) < 0, then
12‖u1
λ‖2H2α− λ
c
q + 1‖K‖L∞Sq+1
2 (Volg(M))(1−q)/2‖u1λ‖q+1
H2α
< 0.
In particular, ‖u1λ‖H2
1= O(λ
11−q ) as λ → ∞. Therefore, for every r ∈
(q, 1), one has ‖u1λ‖H2
1= o(λ
11−r ) as λ →∞.
Let us assume that ‖u1λ‖H2
1= O(λ
11−µ ) for some µ ∈ (1, (d+2)/(d−2))
as λ → ∞. Consequently, ‖u1λ‖H2
α→ 0 as λ → ∞. On the other hand,
since Eλ(u1λ) ≤ (λ∗− λ)‖K‖L1F (t∗), then Eλ(u1
λ) → −∞ as λ →∞. Onaccount of (9.5), we have
(12− λC‖K‖L∞Sµ+1
µ+1‖u1λ‖µ−1
H2α
)‖u1
λ‖2H2α→ −∞
as λ → ∞. Therefore, the expression λ‖u1λ‖µ−1
H2α
necessarily tends to ∞as λ → ∞. But this contradicts the initial assumption. This completes(ii). ¤
Proof of Theorem 9.2. Let us choose (M, g) = (Sd, h), and α(σ) :=α(1 − α − d) for every σ ∈ Sd in Theorem 9.1. Thus, for every λ > λ∗,problem (9.1)λ has at least two distinct, nontrivial solutions u1
λ, u2λ ∈
H21 (Sd). On account of (9.1), the elements vi
λ(x) = |x|αuiλ(x/|x|), i ∈

9.2 Existence of two solutions 235
1, 2, are solutions of (EF)λ. ¤
Now, instead of (f2) we consider a weaker assumption, namely:
(f ′2) lims→0f(s)
s = 0.
The following result shows that (f ′2) is still enough to prove a similarmultiplicity result as Theorem 9.1, but we loose unfortunately the preciselocation of the eigenvalues. More precisely, we have
Theorem 9.3 Assume that f : R→ R fulfills (f1), (f ′2) and sups∈R F (s) >
0. Assume also that (A1) and (A2) are verified with K(λ, σ) = λK(σ).Then there exist a nonempty open interval Λ ⊂ (0,∞) and a number
γ > 0 such that for every λ ∈ Λ problem (Pλ) has at least two distinct,nontrivial solutions u1
λ, u2λ ∈ H2
1 (M) and ‖uiλ‖H2
1< γ, i ∈ 1, 2.
Similarly as in Theorem 9.2, we have
Theorem 9.4 Assume that 1− d < α < 0. Let f : R→ R be a functionas in Theorem 9.3 and K ∈ C∞(Sd) positive. Then, there exists anonempty open interval Λ ⊂ (0,∞) such that for every λ ∈ Λ problem(EF)λ has at least two distinct, nontrivial solutions.
Example 9.2 Let f : R → R be defined by f(s) = 0 for s ≤ 0,
f(s) = sln s for s ∈ (0, e−1] and f(s) = −e−1 for s > e−1, see Figure 9.2.
Note that f satisfies (f ′2) but not (f2) for any ν0 > 1. Therefore, onecan apply Theorems 9.3 and 9.4 (but not Theorems 9.1 and 9.2).
In order to prove Theorems 9.3 and 9.4, we introduce the functionalsN ,F : H2
1 (M) → R defined by
N (u) =12‖u‖2H2
αand F(u) =
∫
M
K(σ)F (u(σ))dσg, u ∈ H21 (M).
(9.6)
Proposition 9.1 limρ→0+supF(u):N (u)<ρ
ρ = 0.
Proof. Due to (f ′2), for an arbitrarily small ε > 0 there exists δ(ε) > 0such that |f(s)| < ε(2‖K‖L∞S2
2)−1|s| for every |s| < δ(ε). On accountof (f1), one may fix 1 < ν < d+2
d−2 and c(ε) > 0 such that |f(s)| < c(ε)|s|νfor every |s| ≥ δ(ε). Combining these two facts, after an integration, weobtain
|F (s)| ≤ ε(4‖K‖L∞S22)−1s2 + c(ε)(ν + 1)−1|s|ν+1 for every s ∈ R.

236 Sublinear Problems on Riemann Manifolds
Fig. 9.2. The function from Example 9.2.
Fix a ρ > 0 and any element u ∈ H2α(M) complying with N (u) < ρ.
Due to the above estimation, we have
F(u) ≤ ε
4‖u‖2H2
α+
c(ε)ν + 1
‖K‖L∞Sν+1ν+1‖u‖ν+1
H2α
<ε
2ρ +
c(ε)ν + 1
‖K‖L∞Sν+1ν+1(2ρ)
ν+12 =
ε
2ρ + c′(ε)ρ
ν+12 .
Thus there exists ρ(ε) > 0 such that for every 0 < ρ < ρ(ε), we have
0 ≤ supF(u) : N (u) < ρρ
≤ ε
2+ c′(ε)ρ
ν−12 < ε,
which completes the proof. ¤
Proof of Theorem 9.3. Let X = H21 (M), and the functionals N ,F
defined in (9.6). Note that Eλ = N−λF . We know already that for everyλ > 0 the functional Eλ = N − λF is coercive and satisfies the Palais-Smale condition. Moreover, since the embedding H2
1 (M) → Lp(M) iscompact, 1 ≤ p < 2d/(d − 2), the functional F is sequentially weaklycontinuous; thus, Eλ is sequentially weakly lower semicontinuous.
Due to (9.2) and (f ′2), the term F (s)/s2 tends to 0 as |s| → ∞ ands → 0, respectively. Since there exists s0 ∈ R such that F (s0) > 0, wemay fix a number s∗ 6= 0 such that F (s∗)
(s∗)2 = maxs6=0F (s)s2 . Therefore, λ∗
appearing in Theorem 9.1 is well-defined and λ∗ = 12
‖α‖L1
‖K‖L1
(s∗)2
F (s∗) .
Now, let us choose u0 = 0, and u1(σ) = us∗(σ) = s∗ for every σ ∈ M.
Fixing ε ∈ (0, 1), due to Proposition 9.1, one may choose ρ > 0 such

9.3 Existence of many global minima 237
thatsupF(u) : N (u) < ρ
ρ<
ε
λ∗; (9.7)
ρ <12(s∗)2‖α‖L1 .
Note that ελ∗ < 1
λ∗ = F(u1)N (u1)
and 12 (s∗)2‖α‖L1 = N (u1). Therefore, by
choosing
a =1 + ε
F(u1)N (u1)
− supF(u):N (u)<ρρ
, (9.8)
all the hypotheses of Theorem 1.13 are verified. Consequently, there isa nonempty open interval Λ ⊂ [0, a] and a number γ > 0 such that forevery λ ∈ Λ, the functional Eλ has at least three distinct critical pointsin H2
1 (M) having ‖ · ‖H21-norm less than γ. This ends the proof of The-
orem 9.3. ¤
Proof of Theorem 9.4. Similar to Theorem 9.2. ¤
9.3 Existence of many global minima
In order to obtain a new kind of multiplicity result concerning (Pλ)(specially, (9.1)λ and (EF)λ), we require:
(f3) There exists µ0 ∈ (0,∞) such that the global minima of the func-tion s 7→ Fµ0(s) := 1
2s2 − µ0F (s) has at least m ≥ 2 connectedcomponents.
Note that (f3) implies that the function s 7→ Fµ0(s) has at least m− 1local maxima. Thus, the function s 7→ µ0f(s) has at least 2m− 1 fixedpoints. In particular, if for some λ > 0 one has K(λ,σ)
α(σ) = µ0 for everyσ ∈ M, then problem (Pλ) has at least 2m − 1 ≥ 3 constant solutions.On the other hand, the following general result can be shown.
Theorem 9.5 Let f : R→ R be a function which fulfills (f1) and (f3).Assume that (A1) and (A2) are verified with K(λ, σ) = λK(σ)+µ0α(σ),and K ∈ C∞(M) is positive. Then
(i) for every η > max0, ‖α‖L1 mins∈R Fµ0(s) there exists a numberλη > 0 such that for every λ ∈ (0, λη) problem (Pλ) has at leastm + 1 solutions u1,η
λ , . . . , um+1,ηλ ∈ H2
1 (M);

238 Sublinear Problems on Riemann Manifolds
Fig. 9.3. The function f(s) = mins+ − sin(πs+), 2(m − 1) from Example 9.3 form = 5.
(ii) if (fq,c1 ) holds then for each λ ∈ (0, λη) there is a set Iλ ⊂
1, . . . , m + 1 with card(Iλ) = m such that
‖ui,ηλ ‖H2
1<
sη,q,c
min1,minM α1/2 , i ∈ Iλ,
where sη,q,c > 0 is the greatest solution of the equation
12s2 − µ0c‖α‖(1−q)/2
L1
q + 1sq+1 − η = 0, s > 0.
A consequence of Theorem 9.5 in the context of (EF)λ reads as follows.
Theorem 9.6 Assume that 1− d < α < 0. Let f : R→ R be a functionas in Theorem 9.5 and K ∈ C∞(Sd) be a positive function. Then, thereexists λ0 > 0 such that for every λ ∈ (0, λ0) problem
−4v = |x|α−2[λK(x/|x|) + µ0α(1− α− d)]f(|x|−αv), x ∈ Rd+1 \ 0
has at least m + 1 solutions.
Example 9.3 Let f : R→ R be defined by f(s) = mins+−sin(πs+), 2(m−1) where m ∈ N \ 1 is fixed and we use the notation s+ = maxs, 0.Clearly, (f1) is verified, while for µ0 = 1, the assumption (f3) is alsofulfilled. Indeed, the function s 7→ F1(s) has precisely m global minima;they are 0, 2, . . . , 2(m− 1). Moreover, mins∈R F1(s) = 0. Therefore, onecan apply Theorems 9.5 and 9.6.

9.3 Existence of many global minima 239
In order to prove Theorems 9.5 and 9.6, throughout relation (9.6), wedefine the functional Nµ0 : H2
1 (M) → R by
Nµ0(u) = N (u)− µ0
∫
M
α(σ)F (u(σ))dσg, u ∈ H21 (M).
Proposition 9.2 The set of all global minima of the functional Nµ0 hasat least m connected components in the weak topology on H2
1 (M).
Proof. First, for every u ∈ H21 (M) we have
Nµ0(u) =12‖u‖2H2
α− µ0
∫
M
α(σ)F (u(σ))dσg
=12
∫
M
|∇u|2dσg +∫
M
α(σ)Fµ0(u(σ))dσg
≥ ‖α‖L1 infs∈R
Fµ0(s).
Moreover, if we consider u(σ) = us(σ) = s for a.e. σ ∈ M, where s ∈ Ris a minimum point of the function s 7→ Fµ0(s), then we have equalityin the previous estimation. Thus,
infu∈H2
1 (M)Nµ0(u) = ‖α‖L1 inf
s∈RFµ0(s).
Moreover, if u ∈ H21 (M) is not a constant function, then |∇u|2 =
gij∂iu∂ju > 0 on a positive measured set of the manifold M. In thiscase, we have
Nµ0(u) =12
∫
M
|∇u|2dσg +∫
M
α(σ)Fµ0(u(σ))dσg > ‖α‖L1 infs∈R
Fµ0(s).
Consequently, between the sets
Min(Nµ0) = u ∈ H21 (M) : Nµ0(u) = inf
u∈H21 (M)
Nµ0(u)
and
Min(Fµ0) = s ∈ R : Fµ0(s) = infs∈R
Fµ0(s)
there is a one-to-one correspondence. Indeed, let θ be the function thatassociates to every number t ∈ R the equivalence class of those func-tions which are a.e. equal to t in the whole manifold M. Then θ :Min(Fµ0) → Min(Nµ0) is actually a homeomorphism between Min(Fµ0)and Min(Nµ0), where the set Min(Nµ0) is considered with the relativiza-tion of the weak topology on H2
1 (M). On account of the hypothesis (f3),

240 Sublinear Problems on Riemann Manifolds
the set Min(Fµ0) contains at least m ≥ 2 connected components. There-fore, the same is true for the set Min(Nµ0), which completes the proof. ¤
Proof of Theorem 9.5. Let us choose X = H21 (M), N = Nµ0 and
G = −F in Theorem 1.18. Due to Proposition 9.2 and to basic propertiesof the functions Nµ0 , F , all the hypotheses of Theorem 1.18 are satisfied.
Then, for every η > max0, ‖α‖L1 mins∈R Fµ0(s)(≥ infu∈H2
1 (M)Nµ0(u))
there is a number λη > 0 such that for every λ ∈ (0, λη) the functionNµ0 − λF has at least m + 1 critical points; let us denote them byu1,η
λ , . . . , um+1,ηλ ∈ H2
1 (M). Clearly, they are solutions of problem (Pλ),which concludes (i).
We know in addition that m elements from u1,ηλ , . . . , um+1,η
λ belong tothe set N−1
µ0((−∞, η)). Let u be such an element, i.e.,
Nµ0(u) =12‖u‖2H2
α− µ0
∫
M
α(σ)F (u(σ))dσg < η. (9.9)
Assume that (fq,c1 ) holds. Then |F (s)| ≤ c
q+1 |s|q+1 for every s ∈ R. Byusing the Holder inequality, one has
∫
M
α(σ)|u(σ)|q+1dσg ≤ ‖α‖(1−q)/2L1 ‖u‖q+1
H2α
. (9.10)
Since η > 0, the equation
12s2 − µ0c‖α‖(1−q)/2
L1
q + 1|s|q+1 − η = 0, (9.11)
always has a positive solution. On account of (9.9) and (9.10), the num-ber ‖u‖H2
αis less then the greatest solution sη,q,c > 0 of the equation
(9.11). It remains to apply (9.3), which concludes (ii). ¤
Proof of Theorem 9.6. It follows directly by Theorem 9.5. ¤
9.4 Comments and perspectives

10
Critical Problems on Spheres
Facts are the air of scientists.Without them you can neverfly.
Linus Pauling (1901–1994)
10.1 Introduction
We consider the nonlinear elliptic problem
−∆hu = f(u) on Sd, (P)
where ∆hu = divh(∇u) denotes the Laplace-Beltrami operator actingon u : Sd → R, (Sd, h) is the unit sphere, h being the canonical metricinduced from Rd+1.
Consider a continuous nonlinearity f : R→ R that satisfies (fL1 ) and
(fL2 ) from Section 7.1, where L denotes 0+ or +∞. As we pointed out
before, these assumptions imply that f has an oscillatory behaviour atL. In particular, a whole sequence of distinct, constant solutions for (P)appears as zeros of the function s 7→ f(s), s > 0.
The purpose of this section is to investigate the existence of non-constant solutions for (P) under the assumptions (fL
1 ) and (fL2 ). This
problem will be achieved by constructing sign-changing solutions for(P). We prove two multiplicity results corresponding to L = 0+ andL = +∞, respectively; the ’piquancy’ is that not only infinitely manysign-changing solutions for (P) are guaranteed but we also give a lowerestimate of the number of those sequences of solutions for (P) whoseelements in different sequences are mutually symmetrically distinct.
In order to handle this problem, solutions for (P) are being sought in
241

242 Critical Problems on Spheres
the standard Sobolev space H21 (Sd). We say that u ∈ H2
1 (Sd) is a weaksolution for (P) if
∫
Sd
〈∇u,∇v〉dσh =∫
Sd
f(u)vdσh for all v ∈ H21 (Sd).
Since we are interested in the existence of infinitely many sign-changingsolutions, it seems some kind of symmetry hypothesis on the nonlinear-ity f is indispensable; namely, we assume that f is odd in an arbitrarilysmall neighborhood of the origin whenever L = 0+, and f is odd on thewhole R whenever L = +∞. In the case L = 0+ no further assumptionon f is needed at infinity (neither symmetry nor growth of f ; in partic-ular, f may have even a supercritical growth). However, when L = +∞,we have to control the growth of f ; we assume f(s) = O(s
d+2d−2 ) as s →∞,
that is, f has an asymptotically critical growth at infinity. In both cases(L = 0+ and L = +∞), the energy functional E : H2
1 (Sd) → R associ-ated with (P) is well-defined, which is the key tool in order to achieveour results.
The first task is to construct certain subspaces of H21 (Sd) containing
invariant functions under special actions defined by means of carefullychosen subgroups of the orthogonal group O(d + 1). A particular formof this construction has been first exploited by Ding [89]. In our case,every nontrivial element from these subspaces of H2
1 (Sd) changes thesign. The main feature of these subspaces of H2
1 (Sd) is based on thesymmetry properties of their elements: no nontrivial element from onesubspace can belong to another subspace, i.e., elements from distinctsubspaces are distinguished by their symmetries. Consequently, guaran-teeing nontrivial solutions for (P) in distinct subspaces of H2
1 (Sd) of theabove type, these elements cannot be compared with each other. In thenext subsection we show by an explicit construction that the minimalnumber of these subspaces of H2
1 (Sd) is sd = [d/2] + (−1)d+1 − 1. Here,[·] denotes the integer function.
10.2 Group-theoretical argument
Let d ≥ 5 and sd = [d/2] + (−1)d+1 − 1. For every i ∈ 1, ..., sd, wedefine
Gd,i =
O(i + 1)×O(d− 2i− 1)×O(i + 1), if i 6= d−12 ,
O(d+12 )×O(d+1
2 ), if i = d−12 .

10.2 Group-theoretical argument 243
Let us denote by 〈Gd,i; Gd,j〉 the group generated by Gd,i and Gd,j . Thekey result of this section is
Proposition 10.1 For every i, j ∈ 1, ..., sd with i 6= j, the group〈Gd,i; Gd,j〉 acts transitively on Sd.
Proof. Without loosing the generality, we may assume that i < j.
The proof is divided into three steps. For abbreviation, we introducethe notation 0k = (0, ..., 0) ∈ Rk, k ∈ 1, ..., d + 1.
Step 1. The group 〈Gd,i; Gd,j〉 acts transitively on Sd−j−1 × 0j+1.When j = d−1
2 , the proof is trivial since O(d+12 ) acts transitively on
Sd−12 . Assume so that j 6= d−1
2 . We show that for every σ = (σ1, σ2, σ3) ∈Sd−j−1 with σ1 ∈ Ri+1, σ2 ∈ Rj−i, σ3 ∈ Rd−2j−1, and ω ∈ Sj fixedarbitrarily, there exists gij ∈ 〈Gd,i; Gd,j〉 such that
gij(ω, 0d−j) = (σ, 0j+1). (10.1)
Since O(j + 1) acts transitively on Sj , for every σ2 ∈ Rj−i with theproperty that (σ1, σ2) ∈ Sj , there exists an element gj ∈ O(j + 1) suchthat
gjω = (σ1, σ2). (10.2)
Note that |σ1|2 + |σ2|2 = 1 and |σ1|2 + |σ2|2 + |σ3|2 = 1; so |σ2|2 =|σ2|2 + |σ3|2.
If σ2 = 0j−i then σ2 = 0j−i and σ3 = 0d−2j−1; thus, σ = (σ1, 0d−j−i−1).Let gij := gj × idRd−j ∈ Gd,j . Then, due to (10.2), we have
gij(ω, 0d−j) = (gjω, 0d−j) = (σ1, 0j−i, 0d−j) = (σ1, 0d−i) = (σ, 0j+1),
which proves (10.1).If σ2 6= 0j−i, let r = |σ2| > 0. Since O(d − 2i − 1) acts transitively
on Sd−2i−2 (thus, also on the sphere rSd−2i−2), then there exists gi ∈O(d− 2i− 1) such that gi(σ2, 0d−j−i−1) = (σ2, σ3, 0j−i) ∈ rSd−2i−2. Let
gi = idRi+1 × gi × idRi+1 ∈ Gd,i and gj = gj × idRd−j ∈ Gd,j .
Then gij := gigj ∈ 〈Gd,i; Gd,j〉 and on account of (10.2) and i+1 < d−j
(since i < j ≤ sd), we have
gigj(ω, 0d−j) = gi(gjω, 0d−j) = gi(σ1, σ2, 0d−j) = (σ1, gi(σ2, 0d−j−i−1), 0i+1)
= (σ1, σ2, σ3, 0j−i, 0i+1) = (σ, 0j+1),
i.e., relation (10.1).

244 Critical Problems on Spheres
Now, let σ, σ ∈ Sd−j−1. Then, fixing ω ∈ Sj , on account of (10.1),there are g1, g2 ∈ 〈Gd,i;Gd,j〉 such that g1(ω, 0d−j) = (σ, 0j+1) andg2(ω, 0d−j) = (σ, 0j+1). Consequently, g2g
−11 ∈ 〈Gd,i;Gd,j〉 and g2g
−11 (σ, 0j+1) =
(σ, 0j+1), i.e., the group 〈Gd,i; Gd,j〉 acts transitively on Sd−j−1×0j+1.Step 2. The group 〈Gd,i;Gd,j〉 acts transitively on Sd−i−1 × 0i+1.
We can proceed in a similar way as in Step 1; however, for the reader’sconvenience, we sketch the proof. We show that for every σ = (σ1, σ2, σ3) ∈Sd−i−1 with σ1 ∈ Ri+1, σ2 ∈ Rd−j−i−1, σ3 ∈ Rj−i, and ω ∈ Sd−j−1 fixedarbitrarily, there is gij ∈ 〈Gd,i;Gd,j〉 such that
gij(ω, 0j+1) = (σ, 0i+1). (10.3)
Let σ2 ∈ Rd−j−i−1 be such that |σ1|2 + |σ2|2 = 1. Then, due to Step 1,there exists gij ∈ 〈Gd,i; Gd,j〉 such that gij(ω, 0j+1) = (σ1, σ2, 0j+1).
If σ2 = 0d−j−i−1 then σ2 = 0d−j−i−1 and σ3 = 0j−i; thus, (10.3) isverified with the choice gij := gij ∈ 〈Gd,i; Gd,j〉.
If σ2 6= 0d−j−i−1 then let r = |σ2| > 0. Since O(d − 2i − 1) actstransitively on Sd−2i−2 (thus, also on the sphere rSd−2i−2), then thereexists gi ∈ O(d − 2i − 1) such that gi(σ2, 0j−i) = (σ2, σ3) ∈ rSd−2i−2.
Let gi = idRi+1 × gi × idRi+1 ∈ Gd,i. Then
gigij(ω, 0j+1) = gi(σ1, σ2, 0j+1) = (σ1, gi(σ2, 0j−i), 0i+1) = (σ, 0i+1).
Consequently, gij := gigij ∈ 〈Gd,i; Gd,j〉 verifies (10.3). Now, followingthe last part of Step 1, our claim follows.
Step 3. (Proof concluded) The group 〈Gd,i;Gd,j〉 acts transitively onSd.We show that for every σ = (σ1, σ2, σ3) ∈ Sd with σ1 ∈ Ri+1, σ2 ∈Rd−j−i−1, σ3 ∈ Rj+1, and ω ∈ Sd−i−1 fixed arbitrarily, there is gij ∈〈Gd,i; Gd,j〉 such that
gij(ω, 0i+1) = σ. (10.4)
Let σ3 ∈ Rj−i such that |σ3| = |σ3|. Then, due to Step 2, there existsgij ∈ 〈Gd,i;Gd,j〉 such that gij(ω, 0i+1) = (σ1, σ2, σ3, 0i+1).
If σ3 = 0j−i then σ3 = 0j+1 and (10.4) is verified by choosing gij :=gij ∈ 〈Gd,i;Gd,j〉.
If σ3 6= 0j−i, let r = |σ3| = |σ3| > 0. Since O(j + 1) acts transitivelyon Sj , there exists gj ∈ O(j + 1) such that gj(σ3, 0i+1) = σ3 ∈ rSj . Letus fix the element gj = idRd−j × gj ∈ Gd,j . Then
gj gij(ω, 0i+1) = gj(σ1, σ2, σ3, 0i+1) = (σ1, σ2, gj(σ3, 0i+1)) = (σ1, σ2, σ3) = σ.
Consequently, gij := gj gij ∈ 〈Gd,i; Gd,j〉 verifies (10.4).

10.2 Group-theoretical argument 245
Now, let σ, σ ∈ Sd. Then, fixing ω ∈ Sd−i−1, on account of (10.4), thereare g1, g2 ∈ 〈Gd,i;Gd,j〉 such that g1(ω, 0i+1) = σ and g2(ω, 0i+1) = σ.Consequently, g2g
−11 ∈ 〈Gd,i; Gd,j〉 and g2g
−11 (σ) = σ, i.e., the group
〈Gd,i; Gd,j〉 acts transitively on Sd. This completes the proof. ¤
Let d ≥ 5 and fix Gd,i for some i ∈ 1, ..., sd. We define the functionτi : Sd → Sd associated to Gd,i by
τi(σ) =
(σ3, σ2, σ1), if i 6= d−1
2, and σ = (σ1, σ2, σ3) with σ1, σ3 ∈ Ri+1, σ2 ∈ Rd−2i−1;
(σ3, σ1), if i = d−12
, and σ = (σ1, σ3) with σ1, σ3 ∈ R d+12 .
The explicit form of the groups Gd,i and the functions τi can be seenin Table 1 for dimensions d = 5, ..., 12. It is clear by construction thatτi /∈ Gd,i, τiGd,iτ
−1i = Gd,i and τ2
i = idRd+1 .
d sd Gd,i; i ∈ 1, ..., sd τi; i ∈ 1, ..., sd5 2 G5,1 = O(2)×O(2)×O(2) τ1(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ2, σ3 ∈ R2
G5,2 = O(3)×O(3) τ2(σ1, σ2) = (σ2, σ1); σ1, σ2 ∈ R3
6 1 G6,1 = O(2)×O(3)×O(2) τ1(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R2, σ2 ∈ R3
7 3 G7,1 = O(2)×O(4)×O(2) τ1(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R2, σ2 ∈ R4
G7,2 = O(3)×O(2)×O(3) τ2(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R3, σ2 ∈ R2
G7,3 = O(4)×O(4) τ3(σ1, σ2) = (σ2, σ1); σ1, σ2 ∈ R4
8 2 G8,1 = O(2)×O(5)×O(2) τ1(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R2, σ2 ∈ R5
G8,2 = O(3)×O(3)×O(3) τ2(σ1, σ2, σ3) = (σ2, σ1, σ3); σ1, σ2, σ3 ∈ R3
9 4 G9,1 = O(2)×O(6)×O(2) τ1(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R2, σ2 ∈ R6
G9,2 = O(3)×O(4)×O(3) τ2(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R3, σ2 ∈ R4
G9,3 = O(4)×O(2)×O(4) τ3(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R4, σ2 ∈ R2
G9,4 = O(5)×O(5) τ4(σ1, σ2) = (σ2, σ1); σ1, σ2 ∈ R5
10 3 G10,1 = O(2)×O(7)×O(2) τ1(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R2, σ2 ∈ R7
G10,2 = O(3)×O(5)×O(3) τ2(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R3, σ2 ∈ R5
G10,3 = O(4)×O(3)×O(4) τ3(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R4, σ2 ∈ R3
11 5 G11,1 = O(2)×O(8)×O(2) τ1(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R2, σ2 ∈ R8
G11,2 = O(3)×O(6)×O(3) τ2(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R3, σ2 ∈ R6
G11,3 = O(4)×O(4)×O(4) τ3(σ1, σ2, σ3) = (σ2, σ1, σ3); σ1, σ2, σ3 ∈ R4
G11,4 = O(5)×O(2)×O(5) τ4(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R5, σ2 ∈ R2
G11,5 = O(6)×O(6) τ5(σ1, σ2) = (σ2, σ1); σ1, σ2 ∈ R6
12 4 G12,1 = O(2)×O(9)×O(2) τ1(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R2, σ2 ∈ R9
G12,2 = O(3)×O(7)×O(3) τ2(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R3, σ2 ∈ R7
G12,3 = O(4)×O(5)×O(4) τ3(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R4, σ2 ∈ R5
G12,4 = O(5)×O(3)×O(5) τ4(σ1, σ2, σ3) = (σ3, σ2, σ1); σ1, σ3 ∈ R5, σ2 ∈ R3
Table 1.
Inspired by [30], [32], we introduce the action of the group Gτi
d,i =〈Gd,i, τi〉 ⊂ O(d + 1) on the space H2
1 (Sd). Due to the above propertiesof τi, only two types of elements in Gτi
d,i can be distinguished; namely,

246 Critical Problems on Spheres
g = g ∈ Gd,i, and g = τig ∈ Gτi
d,i \ Gd,i (with g ∈ Gd,i), respectively.Therefore, the action Gτi
d,i ×H21 (Sd) → H2
1 (Sd) given by
gu(σ) = u(g−1σ), (τig)u(σ) = −u(g−1τ−1i σ), (10.5)
for g ∈ Gd,i, u ∈ H21 (Sd) and σ ∈ Sd, is well-defined, continuous and
linear. We define the subspace of H21 (Sd) containing all symmetric points
with respect to the compact group Gτi
d,i, i.e.,
HGτid,i
(Sd) = u ∈ H21 (Sd) : gu = u for every g ∈ Gτi
d,i.For further use, we also introduce
HGd,i(Sd) = u ∈ H2
1 (Sd) : gu = u for every g ∈ Gd,i,where the action of the group Gd,i on H2
1 (Sd) is defined by the firstrelation of (10.5).
Remark 10.1 Every nonzero element of the space HGτid,i
(Sd) changes
sign. To see this, let u ∈ HGτid,i
(Sd) \ 0. Due to the Gτi
d,i-invariance of
u and (10.5) we have u(σ) = −u(τ−1i σ) for every σ ∈ Sd. Since u 6= 0, it
should change the sign.
The next result shows us how can we construct mutually distinctsubspaces of H2
1 (Sd) which cannot be compared by symmetrical pointof view.
Theorem 10.1 For every i, j ∈ 1, ..., sd with i 6= j, one has
(i) HGd,i(Sd) ∩HGd,j
(Sd) = constant functions on Sd;(ii) HG
τid,i
(Sd) ∩HG
τjd,j
(Sd) = 0.
Proof. (i) Let u ∈ HGd,i(Sd) ∩ HGd,j
(Sd). In particular, u is bothGd,i- and Gd,j-invariant, i.e. giu = gju = u for every gi ∈ Gd,i andgj ∈ Gd,j , respectively. Consequently, u is also 〈Gd,i, Gd,j〉-invariant;thus, u(σ) = u(gijσ) for every gij ∈ 〈Gd,i, Gd,j〉 and σ ∈ Sd. Due toProposition 10.1, for every fixed σ ∈ Sd, the orbit of gijσ is the wholesphere Sd whenever gij runs through 〈Gd,i, Gd,j〉. Therefore, u shouldbe constant.
(ii) Let u ∈ HGτid,i
(Sd)∩HG
τjd,j
(Sd). The second relation of (10.5) shows
that u(σ) = −u(τ−1i σ) = −u(τ−1
j σ), σ ∈ Sd. But, due to (i), u is con-stant. Thus, u should be 0. ¤

10.2 Group-theoretical argument 247
Fig. 10.1. The image of the function w : Sd → R from (10.6) with parameters r =0.2, R = 1.5, s = 0.4; the value w(σ) is represented (radially) on the line determinedby 0 ∈ Rd+1 and σ ∈ Sd, the ’zero altitude’ being cσ, i.e., the sphere cSd, withc = 1.3. The union of those 8 disconnected holes on the sphere Sd where the functionw takes values s and (−s) corresponds to the G
τid,i–invariant set Di. (Note that the
figure describes the case i 6= d−12
. When i = d−12
the coordinate σ2 vanishes and
the figure becomes simpler.)
To conclude this section, we construct explicit functions belonging toHG
τid,i
(Sd) which is of interest in its own right as well. Before we give
the class of functions we are speaking about, we say that a set D ⊂ Sd
is Gτi
d,i-invariant, if gD ⊆ D for every g ∈ Gτi
d,i.
Proposition 10.2 Let i ∈ 1, ..., sd and s > 0 be fixed. Then there exista number Ci > 0 and a Gτi
d,i-invariant set Di ⊂ Sd with Volh(Di) > 0,both independent on the number s, and a function w ∈ HG
τid,i
(Sd) suchthat
i) ‖w‖L∞ ≤ s;
ii) |∇w(σ)| ≤ Cis for a.e. σ ∈ Sd;
iii) |w(σ)| = s for every σ ∈ Di.

248 Critical Problems on Spheres
An explicit function w : Sd → R fulfilling all the requirements of Propo-sition 10.2 is given by
w(σ) =8s
(R− r)sgn(|σ1| − |σ3|)max
(0, min
(R− r
8,R− r
4−
−max
(∣∣∣∣|σ1|+ |σ3| − R + 3r
4
∣∣∣∣ ,
∣∣∣∣∣∣|σ1| − |σ3|
∣∣− R + 3r
4
∣∣∣∣)))
(10.6)
where R > r, and σ = (σ1, σ2, σ3) ∈ Sd with σ1, σ3 ∈ Ri+1, σ2 ∈Rd−2i−1 whenever i 6= d−1
2 , and σ = (σ1, σ3) ∈ Sd with σ1, σ3 ∈ R d+12
whenever i = d−12 . The Gτi
d,i-invariant set Di ⊂ Sd can be defined as
Di =
σ ∈ Sd :
∣∣∣∣|σ1|+ |σ3| − R + 3r
4
∣∣∣∣ ≤R− r
8,
∣∣∣∣||σ1| − |σ3|| − R + 3r
4
∣∣∣∣ ≤R− r
8
.
The geometrical image of the function w from (10.6) is shown by Figure10.1.
10.3 Arbitrarily small solutions
Let f : R → R be a continuous function and F (s) =∫ s
0f(t)dt. We
assume that
(f01 ) −∞ < lim infs→0+
F (s)s2 ≤ lim sups→0+
F (s)s2 = +∞;
(f02 ) lim infs→0+
f(s)s < 0.
Theorem 10.2 Let d ≥ 5 and f : R→ R be a continuous function whichis odd in an arbitrarily small neighborhood of the origin, verifying (f0
1 )and (f0
2 ). Then there exist at least sd = [d/2] + (−1)d+1 − 1 sequencesui
kk ⊂ H21 (Sd), i ∈ 1, ..., sd, of sign-changing weak solutions of (P)
distinguished by their symmetry properties. In addition,
limk→∞
‖uik‖L∞ = lim
k→∞‖ui
k‖H21
= 0 for every i ∈ 1, ..., sd.
Example 10.1 Let α, β, γ ∈ R such that α + β > 1 > α > 0, andγ ∈ (0, 1). Then, the function f : R → R defined by f(0) = 0 andf(s) = |s|α−1s(γ + sin |s|−β) near the origin (but s 6= 0) and extendedin an arbitrarily way to the whole R, verifies both (f0
1 ) and (f02 ).
In order to prove Theorem 10.2, we need some propositions. Through-out this section we assume the hypotheses of Theorem 10.2 are fulfilled.
Let s > 0 be so small that f is odd on [−s, s], and let us definef(s) = sgn(s)f(min(|s|, s)). Clearly, f is continuous and odd on R.
Define also F (s) =∫ s
0f(t)dt, s ∈ R.

10.3 Arbitrarily small solutions 249
On account of (f02 ), one may fix c0 > 0 such that
lim infs→0+
f(s)s
< −c0 < 0. (10.7)
In particular, there is a sequence skk ⊂ (0, s) converging (decreasingly)to 0, such that
f(sk) = f(sk) < −c0sk. (10.8)
Let us define the functions
ψ(s) = f(s)+c0s and Ψ(s) =∫ s
0
ψ(t)dt = F (s)+c0
2s2, s ∈ R. (10.9)
Due to (10.8), ψ(sk) < 0; so, there are two sequences akk, bkk ⊂(0, s), both converging to 0, such that bk+1 < ak < sk < bk for everyk ∈ N and
ψ(s) ≤ 0 for every s ∈ [ak, bk]. (10.10)
Since c0 > 0, see (10.7), the norm
‖u‖c0 =(∫
Sd
|∇u|2dσh + c0
∫
Sd
u2dσh
)1/2
(10.11)
is equivalent to the standard norm ‖·‖H21. Now, we define E : H2
1 (Sd) →R by
E(u) =12‖u‖2c0
−∫
Sd
Ψ(u(σ))dσh,
which is well-defined since ψ has a subcritical growth, and H21 (Sd) is
compactly embedded into Lp(Sd), p ∈ [1, 2∗), see Hebey [136, Theo-rem 2.9, p. 37]. Moreover, E belongs to C1(H2
1 (Sd)), it is even, andit coincides with the energy functional associated to (P) on the setB∞(s) = u ∈ L∞(Sd) : ‖u‖L∞ ≤ s because the functions f and f
coincide on [−s, s].
From now on, we fix i ∈ 1, ..., sd and the corresponding subspaceHG
τid,i
(Sd) of H21 (Sd) introduced in the previous section. Let us denote
by Ei the restriction of the functional E to HGτid,i
(Sd) and for every k ∈ N,consider the set
T ik = u ∈ HG
τid,i
(Sd) : ‖u‖L∞ ≤ bk, (10.12)
where bk is from (10.10).

250 Critical Problems on Spheres
Proposition 10.3 The functional Ei is bounded from below on T ik and its
infimum mik on T i
k is attained at uik ∈ T i
k. Moreover, mik = Ei(ui
k) < 0for every k ∈ N.
Proof. For every u ∈ T ik we have
Ei(u) =12‖u‖2c0
−∫
Sd
Ψ(u(σ))dσh ≥ − max[−bk,bk]
Ψ ·Volh(Sd) > −∞.
It is clear that T ik is convex and closed, thus weakly closed in HG
τid,i
(Sd).
Let mik = infT i
kEi, and unn ⊂ T i
k be a minimizing sequence of Ei formi
k. Then, for large n ∈ N, we have
12‖un‖2c0
≤ mik + 1 + max
[−bk,bk]Ψ ·Volh(Sd),
thus unn is bounded in HGτid,i
(Sd). Up to a subsequence, unn
weakly converges in HGτid,i
(Sd) to some uik ∈ T i
k. Since ψ has a sub-
critical growth, by using the compactness of the embedding HGτid,i
(Sd) ⊂H2
1 (Sd) → Lp(Sd), 1 ≤ p < 2∗, one can conclude the sequentially weakcontinuity of the function u 7→ ∫
Sd Ψ(u(σ))dσh, u ∈ HGτid,i
(Sd). Conse-quently, Ei is sequentially weak lower semicontinuous. Combining thisfact with the weak closedness of the set T i
k, we obtain Ei(uik) = mi
k =infT i
kEi.
The next task is to prove that mik < 0 for every k ∈ N. First, due to
(10.9) and (f01 ), we have
−∞ < lim infs→0+
Ψ(s)s2
≤ lim sups→0+
Ψ(s)s2
= +∞. (10.13)
Therefore, the left-hand side of (10.13) and the evenness of Ψ impliesthe existence of l > 0 and % ∈ (0, s) such that
Ψ(s) ≥ −ls2 for every s ∈ (−%, %). (10.14)
Let Di ⊂ Sd and Ci > 0 be from Proposition 10.2 (which depend onlyon Gd,i and τi), and fix a number l > 0 large enough such that
lVolh(Di) >(l +
c0
2
)Volh(Sd) +
C2i
2, (10.15)
c0 > 0 being from (10.7). Taking into account the right-hand side of(10.13), there is a sequence skk ⊂ (0, %) such that sk ≤ bk and Ψ(sk) =Ψ(−sk) > ls2
k for every k ∈ N.

10.3 Arbitrarily small solutions 251
Let wk := wsk∈ HG
τid,i
(Sd) be the function from Proposition 10.2
corresponding to the value sk > 0. Then wk ∈ T ik and one has
Ei(wk) =12‖wk‖2c0
−∫
Sd
Ψ(wk(σ))dσh
≤ 12
(C2
i + c0Volh(Sd))s2
k −∫
Di
Ψ(wk(σ))dσh −∫
Sd\Di
Ψ(wk(σ))dσh.
On account of Proposition 10.2 iii), we have∫
Di
Ψ(wk(σ))dσh = Ψ(sk)Volh(Di) > lVolh(Di)s2k.
On the other hand, due to relation (10.14) and Proposition 10.2 i), wehave
∫
Sd\Di
Ψ(wk(σ))dσh ≥ −l
∫
Sd\Di
w2k(σ)dσh > −lVolh(Sd)s2
k.
Combining (10.15) with the above estimations, we obtain that mik =
infT ikEi ≤ Ei(wk) < 0, which proves our claim. ¤
Proposition 10.4 Let uik ∈ T i
k from Proposition 10.3. Then, ‖uik‖L∞ ≤
ak. (The number ak is from (10.10).)
Proof. Let A = σ ∈ Sd : uik(σ) /∈ [−ak, ak] and suppose that
meas(A) > 0. Define the function γ(s) = sgn(s)min(|s|, ak) and setwk = γ ui
k. Since γ is Lipschitz continuous, then wk ∈ H21 (Sd), see
Hebey [136, Proposition 2.5, p. 24].We first claim that wk ∈ HG
τid,i
(Sd). To see this, it suffices to prove
that gwk = wk for every g ∈ Gτi
d,i. First, let g = g ∈ Gd,i. Since guik = ui
k,we have
gwk(σ) = wk(g−1σ) = (γuik)(g−1σ) = γ(ui
k(g−1σ)) = γ(uik(σ)) = wk(σ)
for every σ ∈ Sd. Now, let g = τig ∈ Gτi
d,i \Gd,i (with g ∈ Gd,i). Since γ
is an odd function and (τig)uik = ui
k, on account of (10.5) we have
(τig)wk(σ) = −wk(g−1τ−1i σ) = −(γ ui
k)(g−1τ−1i σ)
= γ(−uik(g−1τ−1
i σ)) = γ((τig)uik(σ)) = γ(ui
k(σ))= wk(σ)
for every σ ∈ Sd. In conclusion, the claim is true, and wk ∈ HGτid,i
(Sd).
Moreover, ‖wk‖L∞ ≤ ak. Consequently, wk ∈ T ik.

252 Critical Problems on Spheres
We introduce the sets
A1 = σ ∈ A : uik(σ) < −ak and A2 = σ ∈ A : ui
k(σ) > ak.
Thus, A = A1 ∪A2, and we have that wk(σ) = uik(σ) for all σ ∈ Sd \A,
wk(σ) = −ak for all σ ∈ A1, and wk(σ) = ak for all σ ∈ A2. Moreover,
Ei(wk)− Ei(uik) =
= −12
∫
A
|∇uik|2dσh +
c0
2
∫
A
[w2k − (ui
k)2]dσh −∫
A
[Ψ(wk)−Ψ(uik)]dσh
= −12
∫
A
|∇uik(σ)|2dσh +
c0
2
∫
A
[a2k − (ui
k(σ))2]dσh
−∫
A1
[Ψ(−ak)−Ψ(uik(σ))]dσh −
∫
A2
[Ψ(ak)−Ψ(uik(σ))]dσh.
Note that∫
A[w2
k − (uik)2]dσh ≤ 0. Next, by the mean value theorem, for
a.e. σ ∈ A2, there exists θk(σ) ∈ [ak, bk] such that Ψ(ak)−Ψ(uik(σ)) =
ψ(θk(σ))(ak − uik(σ)). Thus, on account of (10.10), one has
∫
A2
[Ψ(ak)−Ψ(uik(σ))]dσh ≥ 0.
In the same way, using the oddness of ψ, we conclude that∫
A1
[Ψ(−ak)−Ψ(uik(σ))]dσh ≥ 0.
In conclusion, every term of the expression Ei(wk)−Ei(uik) is nonpositive.
On the other hand, since wk ∈ T ik, then Ei(wk) ≥ Ei(ui
k) = infT ikEi. So,
every term in Ei(wk)− Ei(uik) should be zero. In particular,
∫
A
|∇uik(σ)|2dσh =
∫
A
[a2k − (ui
k(σ))2]dσh = 0.
These equalities imply that meas(A) should be 0, contradicting our ini-tial assumption. ¤
Proposition 10.5 limk→∞mik = limk→∞ ‖ui
k‖L∞ = limk→∞ ‖uik‖H2
1=
0.
Proof. Using Proposition 10.4, we have that ‖uik‖L∞ ≤ ak < s for a.e.
σ ∈ Sd. Therefore, we readily have that limk→∞ ‖uik‖L∞ = 0.

10.3 Arbitrarily small solutions 253
Moreover, the mean value theorem shows that
mik = Ei(ui
k) ≥ −∫
Sd
Ψ(uik(σ))dσh ≥ − max
[−s,s]|ψ|
∫
Sd
|uik(σ)|dσh
≥ − max[−s,s]
|ψ|Volh(Sd)ak.
Since limk→∞ ak = 0, we have limk→∞mk ≥ 0. On the other hand, mk <
0 for every k ∈ N, see Proposition 10.3, which implies limk→∞mik = 0.
Note that
‖uik‖2c0
2= mi
k +∫
Sd
Ψ(uik(σ))dσh ≤ mi
k + max[−s,s]
|ψ|Volh(Sd)ak,
thus limk→∞ ‖uik‖c0 = 0. But ‖ · ‖c0 and ‖ · ‖H2
1are equivalent norms. ¤
Now, we prove the key result of this section where the non-smoothprinciple of symmetric criticality for Szulkin-type functions plays a cru-cial role.
Proposition 10.6 uik is a weak solution of (P) for every k ∈ N.
Proof. We divide the proof into two parts. First, let
Tk = u ∈ H21 (Sd) : ‖u‖L∞ ≤ bk.
Step 1. 〈E ′(uik), w − ui
k〉H21≥ 0 for every w ∈ Tk.
The set Tk is closed and convex in H21 (Sd). Let ζTk
be the indicatorfunction of the set Tk (i.e., ζTk
(u) = 0 if u ∈ Tk, and ζTk(u) = +∞, oth-
erwise). We define the Szulkin-type functional Ik : H21 (Sd) → R∪+∞
by Ik = E+ζTk, see Section 1.6. We deduce that E is of class C1(H2
1 (Sd)),ζTk
is convex, lower semicontinuous and proper. On account of (10.12),we have that T i
k = Tk ∩ HGτid,i
(Sd); therefore, the restriction of ζTkto
HGτid,i
(Sd) is precisely the indicator function ζT ik
of the set T ik. Since ui
k is
a local minimum point of Ei relative to T ik (see Proposition 10.3), then
uik is a critical point of the functional Ii
k := Ei + ζT ik
in the sense ofSzulkin [282, p. 78], that is,
0 ∈ E ′i(uik) + ∂ζT i
k(ui
k) in (HGτid,i
(Sd))∗, (10.16)
where ∂ζT ik
stands for the subdifferential of the convex function ζT ik.
Since E is even, by means of (10.5) one can easily check that it isGτi
d,i-invariant. The function ζTkis also Gτi
d,i-invariant since gTk ⊆ Tk
for every g ∈ Gτi
d,i (we use again (10.5)). Finally, since Gτi
d,i ⊂ O(d+1) iscompact, and Ei and ζT i
kare the restrictions of E and ζTk
to HGτid,i
(Sd),

254 Critical Problems on Spheres
respectively, we may apply – via relation (10.16) – the principle of sym-metric criticality proved by Kobayaski-Otani, see Theorem 1.27. Thus,we obtain
0 ∈ E ′(uik) + ∂ζTk
(uik) in (H2
1 (Sd))∗.
Consequently, for every w ∈ H21 (Sd), we have
〈E ′(uik), w − ui
k〉H21
+ ζTk(w)− ζTk
(uik) ≥ 0,
which implies our claim.Step 2. (Proof concluded) ui
k is a weak solution of (P).By Step 1, we have∫
Sd〈∇ui
k,∇(w−uik)〉dσh+c0
∫
Sdui
k(w−uik)dσh−
∫
Sdψ(ui
k)(w−uik)dσh ≥ 0, ∀ w ∈ Tk.
Recall from (10.9) that ψ(s) = f(s) + c0s, s ∈ R. Moreover, f and f
coincide on [−s, s] and uik(σ) ∈ [−ak, ak] ⊂ (−s, s) for a.e. σ ∈ Sd (see
Proposition 10.4). Consequently, the above inequality reduces to∫
Sd
〈∇uik,∇(w − ui
k)〉dσh −∫
Sd
f(uik)(w − ui
k)dσh ≥ 0, ∀ w ∈ Tk.
(10.17)Let us define the function γ(s) = sgn(s)min(|s|, bk), and fix ε > 0 andv ∈ H2
1 (Sd) arbitrarily. Since γ is Lipschitz continuous, wk = γ(uik+εv)
belongs to H21 (Sd), see Hebey [136, Proposition 2.5, p. 24]. The explicit
expression of wk is
wk(σ) =
−bk, if σ ∈ uik + εv < −bk
uik(σ) + εv(σ), if σ ∈ −bk ≤ ui
k + εv < bkbk, if σ ∈ bk ≤ ui
k + εv.
Therefore, wk ∈ Tk. Taking w = wk as a test function in (10.17), weobtain
0 ≤ −∫
uik+εv<−bk
|∇uik|2 +
∫
uik+εv<−bk
f(uik)(bk + ui
k)
+ε
∫
−bk≤uik+εv<bk
〈∇uik,∇v〉 − ε
∫
−bk≤uik+εv<bk
f(uik)v
−∫
bk≤uik+εv
|∇uik|2 −
∫
bk≤uik+εv
f(uik)(bk − ui
k).

10.3 Arbitrarily small solutions 255
After a suitable rearrangement of the terms in this inequality, we obtainthat
0 ≤ ε
∫
Sd
〈∇uik,∇v〉 − ε
∫
Sd
f(uik)v
−∫
uik+εv<−bk
|∇uik|2 −
∫
bk≤uik+εv
|∇uik|2
+∫
uik+εv<−bk
f(uik)(bk + ui
k + εv) +∫
bk≤uik+εv
f(uik)(−bk + ui
k + εv)
−ε
∫
uik+εv<−bk
〈∇uik,∇v〉 − ε
∫
bk≤uik+εv
〈∇uik,∇v〉.
Let Mk = max[−ak,ak] |f |. Since uik(σ) ∈ [−ak, ak] ⊂ [−bk, bk] for a.e.
σ ∈ Sd, we have∫
uik+εv<−bk
f(uik)(bk + ui
k + εv) ≤ −εMk
∫
uik+εv<−bk
v
and∫
bk≤uik+εv
f(uik)(−bk + ui
k + εv) ≤ εMk
∫
bk≤uik+εv
v.
Using the above estimates and dividing by ε > 0, we obtain
0 ≤∫
Sd
〈∇uik,∇v〉dσh −
∫
Sd
f(uik)vdσh
−Mk
∫
uik+εv<−bk
vdσh + Mk
∫
bk≤uik+εv
vdσh
−∫
uik+εv<−bk
〈∇uik,∇v〉dσh −
∫
bk≤uik+εv
〈∇uik,∇v〉dσh.
Now, letting ε → 0+, and taking into account Proposition 10.4 (i.e.,−ak ≤ ui
k(σ) ≤ ak for a.e. σ ∈ Sd), we have
meas(uik + εv < −bk) → 0 and meas(bk ≤ ui
k + εv) → 0,
respectively. Consequently, the above inequality reduces to
0 ≤∫
Sd
〈∇uik,∇v〉dσh −
∫
Sd
f(uik)vdσh.
Putting (−v) instead of v, we see that uik is a weak solution of (P), which
completes the proof. ¤

256 Critical Problems on Spheres
Proof of Theorem 10.2. Fix i ∈ 1, ..., sd. Combining Propositions10.3 and 10.5, one can see that there are infinitely many distinct ele-ments in the sequence ui
kk. These elements are weak solutions of (P)as Proposition 10.6 shows, and they change sign, see Remark 10.1. More-over, due to Theorem 10.1 (ii), solutions in different spaces HG
τid,i
(Sd),i ∈ 1, ..., sd, cannot be compared from symmetrical point of view.The L∞– and H2
1–asymptotic behaviour of the sequences of solutionsare described in Proposition 10.5. ¤
10.4 Arbitrarily large solutions
Instead of (f01 ) and (f0
2 ), respectively, we assume
(f∞1 ) −∞ < lim infs→∞F (s)s2 ≤ lim sups→∞
F (s)s2 = +∞;
(f∞2 ) lim infs→∞f(s)
s < 0.
Unlike in Theorem 10.2 where no further assumption is needed atinfinity, we have to control here the growth of f . We assume that f hasan asymptotically critical growth at infinity, namely,
(f∞3 ) sups∈R|f(s)|
1+|s|2∗−1 < ∞, where 2∗ = 2dd−2 .
Theorem 10.3 Let d ≥ 5 and f : R → R be an odd, continuous func-tion which verifies (f∞1 ), (f∞2 ) and (f∞3 ). Then there exist at leastsd = [d/2] + (−1)d+1 − 1 sequences ui
kk ⊂ H21 (Sd), i ∈ 1, ..., sd,
of sign-changing weak solutions of (P) distinguished by their symmetryproperties. In addition,
limk→∞
‖uik‖L∞ = lim
k→∞‖ui
k‖H21
= ∞ for every i ∈ 1, ..., sd.
Example 10.2 Let d ≥ 5 and α, β, γ ∈ R such that d+2d−2 ≥ α > 1,
|α − β| < 1, and γ ∈ (0, 1). Then, the function f : R → R definedby f(s) = |s|α−1s(γ + sin |s|β) verifies the hypotheses (f∞1 ), (f∞2 ) and(f∞3 ), respectively.
Certain parts of the proof of Theorem 10.3 are similar to that of The-orem 10.2; so, we present only the differences. We assume throughoutof this section that the hypotheses of Theorem 10.3 are fulfilled. Due to(f∞2 ), one can fix c∞ > 0 such that
lim infs→∞
f(s)s
< −c∞ < 0.

10.4 Arbitrarily large solutions 257
Let sk ⊂ (0,∞) be a sequence converging (increasingly) to +∞, suchthat f(sk) < −c∞sk. We define the functions
ψ(s) = f(s) + c∞s and Ψ(s) =∫ s
0
ψ(t)dt = F (s) +c∞2
s2, s ∈ R.
(10.18)By construction, ψ(sk) < 0; consequently, there are two sequencesakk, bkk ⊂ (0,∞), both converging to ∞, such that ak < sk <
bk < ak+1 for every k ∈ N and
ψ(s) ≤ 0 for every s ∈ [ak, bk]. (10.19)
Since c∞ > 0, the norm ‖ · ‖c∞ defined in the same way as (10.11) withc∞ instead of c0, is equivalent to the standard norm ‖ · ‖H2
1. Now, we
define the energy functional E : H21 (Sd) → R associated with (P) by
E(u) =12‖u‖2c∞ −
∫
Sd
Ψ(u(σ))dσh.
Since H21 (Sd) is continuously embedded into Lp(Sd), 1 ≤ p ≤ 2∗, see
[136, Corollary 2.1, p. 33]), using hypothesis (f∞3 ), the functional E iswell-defined, and it belongs to C1(H2
1 (Sd)). Moreover, since f is odd onthe whole R, the functional E is even.
We fix i ∈ 1, ..., sd and the subspace HGτid,i
(Sd) of H21 (Sd). Let Ei
be the restriction of the functional E to HGτid,i
(Sd) and for every k ∈ N,define the set
Zik = u ∈ HG
τid,i
(Sd) : ‖u‖L∞ ≤ bk,
where bk is from (10.19).
Proposition 10.7 The functional Ei is bounded from below on Zik and
its infimum mik on Zi
k is attained at uik ∈ Zi
k. Moreover, limk→∞ mik =
−∞.
Proof. It is easy to check that Ei is bounded from below on Zik. In
order to see that it attains its infimum on Zik we show that the function
u 7→ ∫Sd Ψ(u(σ))dσh, u ∈ HG
τid,i
(Sd) is sequentially weak continuous;in such case, Ei is sequentially weak lower semicontinuous and we mayproceed in the standard way. On one hand, due to (f∞3 ), (10.18) andthe oddness of ψ, one can find c1 > 0 such that
|ψ(s)| ≤ c1(1 + |s|2∗−1), s ∈ R. (10.20)

258 Critical Problems on Spheres
On the other hand, the definition of Gd,i shows that the Gd,i-orbit ofevery point σ ∈ Sd has at least dimension 1, i.e., dim(Gd,iσ) ≥ 1 forevery σ ∈ Sd. Thus
dG = mindim(Gd,iσ) : σ ∈ Sd ≥ 1.
Applying [30, Lemma 3.2], we conclude in particular that HGd,i(Sd) is
compactly embedded into Lq(Sd), whenever q ∈[1, 2d−2
d−3
). Since 2d−2
d−3 >
2∗, the embedding HGτid,i
(Sd) ⊂ HGd,i(Sd) → L2∗(Sd) is compact. Com-
bining (10.20) with the above compactness property, we conclude thesequentially weak continuity of the function u 7→ ∫
Sd Ψ(u(σ))dσh, u ∈HG
τid,i
(Sd). Consequently, we may assert that the infimum mik on Zi
k is
attained at the point uik ∈ Zi
k.We will prove limk→∞ mi
k = −∞. First, due to (10.18) and (f∞1 ), wehave
−∞ < lim infs→∞
Ψ(s)s2
≤ lim sups→∞
Ψ(s)s2
= +∞. (10.21)
The left inequality of (10.21) and the evenness of Ψ implies the existenceof l, % > 0 such that
Ψ(s) ≥ −ls2 for every |s| > %. (10.22)
Let Di ⊂ Sd and Ci > 0 be from Proposition 10.2 (which depend onlyon Gd,i and τi), and fix a number l > 0 large enough such that
lVolh(Di) >(l +
c∞2
)Volh(Sd) +
C2i
2. (10.23)
Taking into account the right-hand side of (10.21), there is a sequenceskk ⊂ (0,∞) such that limk→∞ sk = ∞ and Ψ(sk) = Ψ(−sk) > ls2
k
for every k ∈ N.
Let bnkk be an increasing subsequence of bkk such that sk ≤ bnk
for every k ∈ N. Let wk := wsk∈ HG
τid,i
(Sd) be the function from
Proposition 10.2 corresponding to the value sk > 0. Then wk ∈ Zink
andone has
Ei(wk) =12‖wk‖2c∞ −
∫
Sd
Ψ(wk(σ))dσh
≤ 12
(C2
i + c∞Volh(Sd))s2
k −∫
Di
Ψ(wk(σ))dσh −∫
Sd\Di
Ψ(wk(σ))dσh.

10.4 Arbitrarily large solutions 259
On account of Proposition 10.2 iii), we have∫
Di
Ψ(wk(σ))dσh = Ψ(sk)Volh(Di) > lVolh(Di)s2k.
Due to Proposition 10.2 i) and (10.22), we have∫
Sd\Di
Ψ(wk(σ))dσh =∫
(Sd\Di)∩|wk|≤%Ψ(wk(σ))dσh
+∫
(Sd\Di)∩|wk|>%Ψ(wk(σ))dσh
≥ −(
max[−%,%]
|Ψ|+ ls2k
)Volh(Sd).
Combining these estimates, we obtain that
Ei(wk) ≤ s2k
(−lVolh(Di) +
(l +
c∞2
)Volh(Sd) +
C2i
2
)+max
[−%,%]|Ψ|Volh(Sd).
Taking into account (10.23) and that limk→∞ sk = ∞, we obtain limk→∞ Ei(wk) =−∞. Since mi
nk= Ei(ui
nk) = infZi
nkEi ≤ Ei(wk), then limk→∞ mi
nk=
−∞. Since the sequence mikk is non-increasing, the claim follows. ¤
Proposition 10.8 limk→∞ ‖uik‖L∞ = limk→∞ ‖ui
k‖H21
= ∞.
Proof. Assume first by contradiction that there exists a subsequenceui
nkk of ui
kk such that ‖uink‖L∞ ≤ M for some M > 0. In particular,
uink ⊂ Zi
l for some l ∈ N. Therefore, for every nk ≥ l, we have
mil ≥ mi
nk= inf
Zink
Ei = Ei(uink
) ≥ infZi
l
Ei = mil.
Consequently, mnk= ml for every nk ≥ l, and since the sequence mi
kk
is non-increasing, there exists k0 ∈ N such that for every k ≥ k0 we havemi
k = mil, contradicting Proposition 10.7.
It remains to prove that limk→∞ ‖uik‖H2
1= ∞. Note that (10.20) and
the continuity of the embedding H21 (Sd) into L2∗(Sd) implies that for
come C > 0 we have∣∣∣∣∫
Sd
Ψ(u(σ))dσh
∣∣∣∣ ≤ C(‖u‖H21
+ ‖u‖2∗H21), ∀u ∈ H2
1 (Sd).
Similarly as above, we assume that there exists a subsequence uinkk of
uikk such that for some M > 0, we have ‖ui
nk‖H2
1≤ M . Since ‖ · ‖c∞
is equivalent with ‖ · ‖H21, due to the above inequality, the sequence
Ei(uink
)k is bounded. But mink
= Ei(uink
), thus, the sequence mink

260 Critical Problems on Spheres
is also bounded. This fact contradicts Proposition 10.7. ¤
Proof of Theorem 10.3. Due to Proposition 10.7, we can find infinitelymany distinct elements ui
k; similar reasoning as in Propositions 10.4 and10.6 show that ui
k are weak solutions of (P) for every k ∈ N. The L∞–and H2
1–asymptotic behaviour of the sequences of solutions are describedin Proposition 10.8. The rest is similar as in Theorem 10.2. ¤
Remark 10.2 Theorems 10.2 and 10.3 can be successfully applied totreat Emden-Fowler equations of the form
−∆v = |x|α−2f(|x|−αv), x ∈ Rd+1 \ 0 (α < 0) (10.24)
whenever f : R → R is enough smooth and oscillates either at zero orat infinity having an asymptotically critical growth. Finding solutionsof (10.24) in the form v(x) = v(r, σ) = rαu(σ), (r, σ) = (|x|, x/|x|) ∈(0,∞)× Sd being the spherical coordinates, we obtain
−∆hu + α(1− d− α)u = f(u) on Sd, (10.25)
see also (9.1)λ. Assuming (fL1 ) and lim infs→L
f(s)s < α(1 − d − α)
with L ∈ 0+, +∞, and (f∞3 ) whenever L = +∞, we may formulatemultiplicity results for (10.25), so for (10.24). Note that the obtainedsolutions of (10.24) are sign-changing and non-radial.
10.5 Historical notes, comments and perspectives
A. Historical notes. One of the most famous problems in DifferentialGeometry is the so-called Yamabe problem: given a smooth compactRiemannian manifold (M, g) of dimension d, d ≥ 3, there exists a met-ric g from the conformal class of g of constant scalar curvature. Thisproblem has a PDE formulation which has been extensively studied bymany authors; the reader id referred to the monographs of Aubin [19]and Hebey [136].
Another class of elliptic problems defined on compact manifolds arisesfrom the Emden-Fowler equation, studied for superlinear nonlineari-ties via minimization or minimax methods by Cotsiolis-Iliopoulos [79],Vazquez-Veron [288], Bidaut-Veron-Veron [39], etc.
In Sections 9.2 and 10 we presented some of our contributions relatedto Emden-Fowler equations when the nonlinearity has either a sublineargrowth at infinity or it has an oscillatory behavior near zero or at infinity.

10.5 Historical notes, comments and perspectives 261
Elliptic problems involving oscillatory nonlinearities have been studiedin Omari-Zanolin [229], Ricceri [258], Saint Raymond [265], subjected tostandard Neumann or Dirichlet boundary value conditions on boundedopen domains of Rn, or even on unbounded domains, see Faraci-Kristaly[111], Kristaly [166]. Results in finding sign-changing solutions for semi-linear problems can be found in Li-Wang [187], Zou [299] and referencestherein. The strategy in these last papers is to construct suitable closedconvex sets which contain all the positive and negative solutions in theinterior, and are invariant with respect to some vector fields. Our ap-proach is rather different than those of [187], [299] and is related to theworks of Bartsch-Schneider-Weth [30] and Bartsch-Willem [32], wherethe existence of non-radial and sign-changing solutions are studied forSchrodinger and polyharmonic equations defined on Rn.
B. Comments. Section 9.2 is based on the paper of Kristaly-Radulescu[175], while the main results of Section 10 are mainly contained inKristaly [169] and Kristaly-Marzantowicz [171].
As we mentioned at the beginning of Section 9.2, when the nonlinear-ity f is a uniformly Lipschitz function (with Lipschitz constant L > 0),we have extra information on the eigenvalues:
(a) problem (Pλ) has only the trivial solution whenever λ ∈ (0, λL);(b) problem (Pλ) has at least two nontrivial solutions whenever λ >
λ∗. Clearly, we have λ∗ ≥ λL, and usually these two numbers do notcoincide. (For instance, if f(s) = ln(1+s2), K(σ) = α(σ) = const., thenλL = 1 while λ∗ ≈ 1.32.) Unfortunately, we have no any precise resultwhen the parameter belongs to the ‘gap-interval’ [λL, λ∗].
In Section 10, the minimal number of those sequences of solutionsfor (P) which contain mutually symmetrically distinct elements is sd =[d/2] + (−1)d+1 − 1. Note that sd ∼ d/2 as d → ∞. However, in lowerdimensions, Theorems 10.2 and 10.3 are not spectacular. For instance,s4 = 0; therefore, on S4 we have no analogous results as Theorems 10.2and 10.3. Note that s3 = 1; in fact, for G3,1 = O(2)×O(2) we may applyour arguments. Hence, on S3 one can find a sequence of solutions of (P)with the described properties in our theorems. We may compare theseresults with that of Bartsch-Willem [32]; they studied the lower boundof those sequences of solutions for a Schrodinger equation on Rd+1 whichcontain elements in different O(d+1)-orbits. Due to [32, Proposition 4.1,p. 457], we deduce that their lower bound is s′d =
[log2
d+33
]whenever
d ≥ 3 and d 6= 4.Let α, β ∈ L∞(Sd) be two Gd,i-invariant functions such that essinfSdβ >

262 Critical Problems on Spheres
0 and consider the problem
−∆hu + α(σ)u = β(σ)f(u) on Sd. (10.26)
If f : R→ R has an asymptotically critical growth fulfilling (fL1 ) and
lim infs→L
f(s)s
< essinfSd
α
β,
problem (10.26) admits a sequence of Gd,i-invariant (perhaps not sign-changing) weak solutions in both cases, i.e. L ∈ 0+,∞. The proofscan be carried out following Theorems 10.2 and 10.3, respectively, con-sidering instead of HG
τid,i
(Sd) the space HGd,i(Sd). Note that α : Sd → R
may change its sign. In particular, this type of result complements thepaper of Cotsiolis-Iliopoulos [78].
C. Further perspectives. The symmetry and compactness of the sphereSd have been deeply exploited in Section 10. We intend to study achallenging problem related to (P) which is formulated on non-compactRiemannian symmetric spaces (for instance, on the hyperbolic spaceHd = SO0(d, 1)/SO(d) which is the dual companion of Sd = SO(d +1)/SO(d)). In order to handle this kind of problem, the action of theisometry group of the symmetric space seems to be essential, as shownby Hebey [136, Chapter 9], Hebey-Vaugon [138].

11
Equations with Critical Exponent
Numbers are the highestdegree of knowledge. It isknowledge itself.
Plato (429–347 B.C.)
11.1 Introduction
In the last years many books and papers were dedicated to study Sobolevspaces and equations with critical exponent on compact or non-compactRiemannian manifold with or without boundary. For recent develop-ments, we refer to the books by Ambrosetti and Malchiodi [6], Druet,Hebey, and Robert [96], and Hebey [135], [136]. In this chapter wepresent some elementary existence results concerning equations withcritical exponent. Here we follow the paper of Hebey [137].
First we formulate the Yamabe problem to give the geometric moti-vation of these type problems. Let (M, g) be a Riemannian space and∇ the Riemannian connection. Let (xi) is a local system of coordinateson M , then
∇ ∂∂xi
(∂
∂xj
)= Γk
ij
∂
∂xk.
The functions Γkij are called the Christoffel symbols of the connection ∇.
In the local system of coordinates (xi) the components of metric tensorg we denote by (gij) with the inverse matrix (gij), and let |g| = det (gij).The divergence operator divg on the C1 vector field X = (Xi) is defined
263

264 Equations with Critical Exponent
by
div gX =1√|g|
∑
i
∂
∂xi(√|g|Xi),
and the Laplace–Beltrami operator by ∆gu = div g(∇u). Here
∇u =∑
i
gij ∂u
∂xi
In the local system of coordinates (xi) the Laplace-Beltrami operator∆g, has the following expression:
∆gu = −gij
(∂2u
∂xi∂xj− Γk
ij
∂u
∂xk
). (11.1)
The curvature associated to the connection ∇ is defined by:
R(X, Y ) = ∇X∇Y −∇Y∇X −∇[X,Y ],
where [·, ·] denote the Poisson bracket of the vector fields X and Y .Consider the 4- covariant tensor R(X, Y, Z, T ) = g(X, R(Z, T )Y ) withcomponents Rlkij = glmRm
kij . The Ricci tensor is obtained from cur-vature tensor by contraction and it is only one nonzero tensor or itsnegative. Its components are Rij = Rk
ikj . The Ricci tensor is symmetricand its contraction Sg = Rijg
ij is called scalar curvature. A metric ofthe form g = eug is said to be conformal metric to g. We denote by [g]the conformal class of the reference metric g. By definition
[g] = eug | u ∈ C∞(M). (11.2)
If Sg and Sg are the scalar curvatures of g and g, one easily gets that
e2uSg = Sg + 2(n− 1)∆gu− (n− 1)(n− 2)|∇u|2g. (11.3)
Let us now write g under the form g = u4
n−2 g, for u : M → R somesmooth positive function. The above relation becomes
∆gu +n− 2
4(n− 1)Sgu =
n− 24(n− 1)
Sgun+2n−2 . (11.4)
The Yamabe problem can be formulated in the following way:
Geometric formulation. For any smooth compact Riemannian mani-fold (M, g) of dimension n, n ≥ 3, there exists g ∈ [g] of constant scalar

11.1 Introduction 265
curvature.
PDE formulation. For any smooth compact Riemannian manifold(M, g) of dimension n, n ≥ 3, there exists u ∈ C∞(M), u > 0 and thereexists λ ∈ R such that
∆gu +n− 2
4(n− 1)Sgu = λu
n+2n−2 (11.5)
where ∆g is the Laplacian with the respect to g, and Sg is the scalarcurvature of g.
If u and λ satisfies equation (11.5), and if g = u4
n−4 g, then we gets
Sg =4(n− 1)n− 2
λ.
In particular, this gives a conformal metric to g of constant scalar cur-vature. The left hand side in this equation (11.5) is referred to as theconformal Laplacian. We denoted by
Lg = ∆gu +n− 2
4(n− 1)Sgu.
Note that Lg is conformally invariant in the following sense: If g =ϕ
4n−2 g is a conformal metric to g, then, for all u ∈ C∞(M),
Lg(u) = ϕ−n+2n−2 Lg(uϕ).
In this chapter we study the problem like (11.4). For this let (M, g)be a smooth compact Riemannian manifold of dimension n ≥ 3, andh : M → R be a smooth function. In the next we study equations of thefollowing form:
(CE)
∆gu + hu = λu2?−1, in M
u > 0, in M,
where λ ∈ R and 2? = 2nn−2 is the critical exponent of the embedding
W 1,2(M) → L2?
.Before to discuss this problem we remember
Theorem 11.1 Let (X, ‖ · ‖) be a real Banach space, Ω ⊂ X be an opensubset, f : Ω → R be a differentiable function, and Φ : Ω → Rn be of

266 Equations with Critical Exponent
class C1. Let also a ∈ Rn be such that H = Φ−1(a) is not empty. Ifx0 ∈ H is a solution of the minimization problem
f(x0) = minx∈H
f(x)
and if DΦ(x0) is surjective, then there exists (λ1, . . . , λn) ∈ Rn suchthat
Df(x0) =n∑
i=1
λiDΦi(x0),
where Φ = (Φ1, . . . , Φn).
The next result is the Hopf’s maximum principle.
Theorem 11.2 Let Ω ⊂ Rn be an open connected set and let
L(u) =n∑
i.j=1
aij∂2u
∂xi∂xj+
n∑
i=1
bi(x)∂u
∂xi + h(x)u
be a linear uniformly elliptic differential operator with bounded coeffi-cients and h ≤ 0. Suppose that u ∈ C2(M) satisfies L(u) ≥ 0. If u
attains its maximum M ≥ 0 in Ω, then u is constant equal to M on Ω.Otherwise if at x0 ∈ ∂Ω, u is continuous and u(x0) = M ≥ 0 then theouter normal derivative at x0, if it exists, satisfies ∂u(x0)
∂n > 0, providedx0 belongs to the boundary of a ball included in Ω. Moreover, if h = 0,the same conclusion hold for a maximum M < 0.
An immediate consequence of the Hopf’s maximum principle is thefollowing.
Proposition 11.1 Let f : M × R → R be a continuous function andu ∈ C2(M) such that
∆gu ≥ u(x)f(x, u(x)),
then either u > 0 or u = 0.
As usual, C∞(M) and C∞0 (M) denote the spaces of smooth functionsand smooth compactly supported function on M respectively.
Definition 11.1 The Sobolev spaceHp
k(M) is the closure of C∞0 (M)in Hp
k (M).

11.1 Introduction 267
If (M, g) is a complete Riemannian manifold, then for any p ≥ 1, we
haveHp
k(M) = Hpk (M).
We finish this section with the Sobolev embedding theorem and theRellich- Kondrachov result for compact manifold without and with bound-ary.
Theorem 11.3 (Sobolev embedding theorems for compact manifolds)Let M be a cpmpact Riemannian manifold of dimension n.
a) If 1r ≥ 1
p − kn , then the embedding Hp
k (M) → Lr(M) is continu-ous.
b) (Rellich-Kondrakov theorem) Suppose that the inequality in a) is strict, then the embedding Hp
k (M) → Lr(M) is compact.c) Suppose 0 < α < 1 and 1
p ≤ k−αn , then the embedding Hp
k (M) →Cα(M) is continuous.
Theorem 11.4 Let (M, g) be a compact n-dimensional Riemannianmanifold with boundary ∂M .
a) The embedding Hp1 (M) → Lq(M) is continuous, if p ≤ q ≤ np
n−p
and compact for p ≤ q < npn−p .
b) If ∂M 6= ∅, then the embedding Hp1 (M)hookrightarrowLq(∂M)
is continuous, if p ≤ q ≤ p(n−1)n−p and compact for p ≤ q < p(n−1)
n−p .
Theorem 11.5 For any smooth compact Riemannian manifold (M, g)of dimension n ≥ 3, there exists B > 0 such that for any u ∈ H2
1 (M),(∫
M
|u|2?
dvg
)2/2?
≤ K2n
∫
M
|∇u|2dvg + B
∫
M
u2dvg (11.6)
and the inequality is sharp.
Theorem 11.6 (Global elliptic regularity) Let M be a compact Riemannmanifold, and suppose that u ∈ L1
loc(M) is a weak solution to ∆gu = f .
a) If f ∈ Hpk (M), then u ∈ Hp
k+2(M), and
‖u‖Hpk+2
≤ C(‖∆gu‖Hpk
+ ‖u‖Lp).
b) If f ∈ Ck,α(M), then f ∈ Ck+2,α(M), and
‖u‖Cpk+2
≤ C(‖∆gu‖Cpk
+ ‖u‖Cα).

268 Equations with Critical Exponent
11.2 Subcritical case
In this section we study the following subcritical equation, i.e
∆gu + hu = λuq−1, in M
u > 0, in M,
(11.7)
where (M, g) b a smooth compact manifold of dimension n ≥ 3, h :M → R a smooth function and q ∈ (2, 2?) be a fixed number.
Definition 11.2 We say that u ∈ H21 (M) is a weak solution of the
equation (11.7) if for every ϕ ∈ H21 (M) we have
∫
M
〈∇u,∇ϕ〉gdvg +∫
M
huϕdvg = α
∫
M
uq−1ϕdvg.
We have the following regularity result.
Theorem 11.7 If u ∈ H21 (M) is a weak solution of (11.7), then u ∈
C∞(M).
Proof First we prove that the weak solution u is smooth, i.e. u ∈C∞(M). For this let f = µqu
q−1, and p1 = 2?. Since u ∈ H21 (M), from
Theorem 11.3 follows that u ∈ Lp1(M). Hence f ∈ Lp1
q−1 (M), and it
follows from Theorem 11.6 that u ∈ Hp1
q−12 (M). Using again Theorem
11.3 embedding theorem, we obtain
1) u ∈ Lp2(M), where p2 = np1n(q−1)−2p1
if n(q − 1) > 2p1
or2) u ∈ Ls(M) for all s if n(q − 1) ≤ 2p1.
If we repeat this process, we get by finite induction that u ∈ Ls(M)for all s. Indeed, let p0 = n(q−2)
2 . Then p1 > p0. We define pi byinduction letting
pi+1 = npi
n(q−1)−2pi, if n(q − 1) > 2pi
pi+1 = +∞, if n(q − 1) ≤ 2pi.
(11.8)
For every i ∈ N? we have pi > p0. It follows that pi+1 > pi. Moreover,u ∈ Lpi+1(M) if n(q−1) > 2pi, and u ∈ Ls(M) for all s if n(q−1) ≤ 2pi.Now, either exists i ∈ N? such that pi > n(q−1)
2 , or pi ≤ n(q−1)2 for all
i. In the first case, pi+1 = +∞ and we get that u ∈ Ls(M) for all s.

11.2 Subcritical case 269
In the second case, (pi) is an increasing sequence bounded from above.Thus (pi) converges, and if p is the limit of the pi’s, then
p =np
n(q − 1)− 2p
so that p = n(q−2)2 , which is impossible. This prove that u ∈ Ls(M) for
all s. By Theorem 11.6 we get u ∈ Hs2(M) for all s. From c) Theorem
11.3 follows that u ∈ C1(M). Then, since q > 2, uq−1 ∈ C1(M), and, inparticular uq−1 ∈ Hs
1(M) for all s. Using again Theorem 11.6, it followsthat u ∈ Hs
3(M) for all s, and c) Theorem 11.3 implies u ∈ C2(M).Since u 6= 0, applying the maximum principle, i.e. Theorem 11.1 we getthan u > 0. From Theorem 11.6 follows that u ∈ C∞(M). Thus theassertion of theorem is proved.
We define
µq = infu∈Hq
∫
M
(|∇u|2 + hu2)dvg, (11.9)
where
Hq = u ∈ H21 | such that
∫
M
|u|qdvg = 1. (11.10)
We have the following result
Theorem 11.8 Let (M, g) be a smooth compact Riemannian manifoldof dimension n ≥ 3. Given q ∈ (2, 2?), there exists u ∈ C∞(M), u > 0in M such that
∆gu + hu = µquq−1,
where∫
Muqdvg = 1, where µq is as above.
Proof Let (ui) ⊂ Hq a minimizing sequence for µq. Taking into accountProposition 3.49 [18] we have |∇|u|| = |∇u| a.e., up to replacing ui by|ui|, we can assume that ui ≥ 0 for all i. Since (ui) ⊂ Hq and q > 2,(ui) using Holder inequality we get
∫
M
|ui|2dvg ≤ Vg(M)q−2
q (∫
M
|ui|qdvg)2q .
From this inequality follows that (ui) is bounded in L2(M). In par-ticular, µq is finite, and (ui) is bounded in H2
1 (M). Since H21 (M) is
a Hilbert space, follows that is reflexive. Taking into account that the

270 Equations with Critical Exponent
embedding H21 (M) → Lq(M) is compact, there exists u ∈ H2
1 (M) anda subsequence of (ui) which will denote in the sameway, such that:
a) ui u weakly in H21 (M)
b) ui → u strongly in Lq(M)c) ui(x) → u(x) a.e. x ∈ M .
From c) follows that u ≥ 0, and by b), u ∈ Hq. Because the norm isweakly lower semicontinuous and ui u weakly in H2
1 (M) follows that
‖u‖H21≤ lim inf
i→+∞‖ui‖H2
1.
Because ui → u strongly in Lq(M) and since Lq(M) ⊂ L2(M), then weobtain
µq =∫
M
(|∇u|2 + hu2)dvg.
In particular, u is minimizer for µq. By Theorem 11.1 follows the exis-tence of α ∈ R, such that for any ϕ ∈ H2
1 (M),∫
M
〈∇u,∇ϕ〉gdvg +∫
M
huϕdvg = α
∫
M
uq−1ϕdvg.
Taking ϕ = u, we get that α = µq. Thus u ∈ Hq, u ≥ 0, a weaksolutions of (11.7).
11.3 Critical case
In this section we study the critical case, i.e. the problem
(CE)
∆gu + hu = λu2?−1, in M
u > 0, in M,
where, (M, g) be a smooth compact manifold of dimension n ≥ 3, h :M → R a smooth function, where λ ∈ R and 2? = 2n
n−2 is the criticalexponent.
We define
µ = infu∈H
∫
M
(|∇u|2 + hu2)dvg,
where
H = u ∈ H21 | such that
∫
M
|u|2?
dvg = 1.

11.3 Critical case 271
Because L2?
(M) ⊂ L2(M), follows that µ is finite. First we state thefollowing regularity result, which essentially is due to Trudinger [284].Here we follows the Hebey work [137].
We have the following regularity result.
Theorem 11.9 Let (M, g) be a smooth compact Riemannian manifoldof dimension n ≥ 3, and let h : M → R be a smooth function. Ifu ∈ H2
1 (M), u ≥ 0 is a weak solution of the equation
∆gu + hu = λu2?−1
where λ ∈ R, then u ∈ C∞(M) and either u ≡ 0, or u > 0 everywhere.
Proof It is enough to prove that u ∈ Ls(M) for some s > 2?, becauseusing the argument from Theorem 11.8 follows that u ∈ C∞(M). For afixed number L > 0 we consider the following functions FL, GL : R→ Rgiven by
FL(t) = |t|2?/2, if |t| ≤ L
2?
2 L(2?−2)/2|t| − 2?−22 L2?/2, if |t| > L,
and
GL(t) = |t|2?−1, if |t| ≤ L
2?
2 L(2?−2)|t| − 2?−22 L2?−1, if |t| > L.
From the definitions of the functions FL and GL follows
FL ≤ t2?/2, GL ≤ t2
?/2 and (FL(t))2 ≥ tGL(t).
From these, follows easily (F ′L(t))2 ≤ 2?
2 G′L(t) for t 6= L. Taking intoaccount that FL and GL are locally Lipschitz and if we denote FL =FL(u) and GL = GL(u) follows that FL, GL ∈ H2
1 (M). Since u ∈H2
1 (M) is a weak solutions the equation (CE), follows that∫
M
〈∇u,∇GL〉gdvg +∫
M
huGLdvg = α
∫
M
u2?−1GLdvg.
Since GL(u) ≤ u2?−1, and u ∈ L2?
(M), it follows that there existsC1, C2 > 0, independent of L, such that
∫
M
G′L(u)|∇u|2dvg ≤ C1 + C2
∫
M
u2?−1GLdvg

272 Equations with Critical Exponent
and since (F ′L(t))2 ≤ 2?
2 G′L(t) and tGL(t) ≤ (FL(t))2, follows that
2?
2
∫
M
|∇FL|dvg ≤ C1 + C2
∫
M
u2?−2F 2Ldvg.
Given K > 0, let
K+ = x ∈ M : u(x) ≤ K,and
K− = x ∈ M : u(x) ≥ K.Because H2
1 (M) → L2?
(M) the embedding is continuous, from theHolder’s inequalities we get∫
M
u2?−2F 2Ldvg =
∫
K−u2?−2F 2
Ldvg +∫
K+u2?−2F 2
Ldvg
≤∫
K−u2?−2F 2
Ldvg +(∫
K+u2?
)2/n (∫
K+F 2?
L
)2/2?
≤∫
K−u2?−2F 2
Ldvg + ε(K)(∫
M
F 2?
L
)2/2?
≤∫
K−u2?−2F 2
Ldvg + C3ε(K)∫
M
(|∇FL|2 + F 2L)dvg,
where ε(K) = (∫
K+ u2?
dvg)2/n, and C3 does not depend on K andL.Since u ∈ L2?
(M), we have limK→+∞
ε(K) = 0. We fix K > 0 such that
C2C3ε(K) < 22? . We suppose that L > K, then we have
∫
K−u2?−2F 2
Ldvg ≤ K2(2?−1)Vg,
where Vg denotes the volume of M with respect the Riemannian metricg. Since FL(t) ≤ t2
?/2 and u ∈ L2?
(M) follows the existence of a realnumber C4 > 0, which does not depend on L such that
∫
M
F 2Ldvg ≤ C4.
In consequence, then there exist C5, C6 > 0, independent of L, withC6 < 1, such that
∫
M
|∇FL|2dvg ≤ C5 + C6
∫
M
|∇FL|2dvg.
From this inequality follows that∫
M
|∇FL|2dvg ≤ C5
1− C6.

11.3 Critical case 273
Taking into account the Sobolev inequality for the embedding H21 (M) →
L2?
(M) and the above inequality we get∫
M
F 2?
dvg ≤ C7,
where C7 does not depend on L. If L → +∞, follows that u ∈ L(2?)2/2(M).But (2?)2/2 > 2 and we get the existence of some s > 2? such thatu ∈ Ls(M). Now we can use the procedure from Theorem 11.8 to provethat u ∈ C∞(M). Now from Theorem 11.1 it follows that either u ≡ 0or u > 0.
Theorem 11.10 Let (M, g) be a smooth compact manifold of dimensionn ≥ 3, and let h : M → R be a smooth function. If µ ≤ 0, then theproblem (CE) has a smooth positive solution.
ProofIn the following we distinguish two cases.First case: µ < 0. Fix q ∈ (2, 2?) and we consider the equation
∆gu + hu = µquq−1,
where µq is defined in (11.8).From Theorem 11.8, there exists uq ∈ C∞(M), uq > 0, such that
∆guq + huq = µquq−1q ,
and∫
Muq
qdvg = 1. Hence there exists u ∈ H such that I(u) < 0, where
I(u) =∫
M
(|∇u|2 + hu2)dvg.
We have
µq ≤ I
(u
(∫
M|u|q)1/q
)
and that∫
M|u|qdvg ≤ V 1− q
2? , where Vg is the volume of M with respectto g, we easily get that there exists ε0 > 0 such that µq ≤ ε0 for everyq ∈ (2, 2?). In similar way, we easily get that there exists K > 0 suchthat µq ≥ −K for all q ∈ (2, 2?). Hence, there exists ε0 > 0 such that
− 1ε0≤ µq ≤ −ε0

274 Equations with Critical Exponent
for all q ∈ (2, 2?). Let xq be a point where uq is maximum. Then∆guq(xq) ≥ 0. It follows from the equation satisfied by uq that
h(xq)uq ≤ µquq−1q (xq).
In particular, h(xq) < 0, and
uq−2q (xq) ≤ 1
ε0maxx∈M
|h(x)|,
therefore the u′qs are uniformly bounded. From Theorem 11.6 followsthat the sequence u′qs are bounded in Hp
2 for all p. In particular, a sub-sequence of the u′qs converge to some u in C1(M) as q → 2?. Assumingthat the µ′qs converge to some λ as q → 2?, we get that u is a weaksolution of
∆gu + hu = λu2?−1.
Because∫
M
uqqdvg = 1, follows that u is nonzero and uq → u uniformly
as q → 2?.From Theorem 11.9 follows that u is smooth and Proposition 11.1
implies that u is everywhere positive. In particular, u is a strong so-lution of the above equation. With similar arguments as above, weget that lim sup
q→2?µq ≤ µ. Independently, it is straightforward that µ ≤
I
((∫
M
u2?
q dvg)−12? uq
), therefore
(∫
M
u2?
q dvg
) 22?
µ ≤ µq
for all q. Since uq → u uniformly, we have that∫
M
u2?
q dvg →∫
M
u2?
dvg.
Hence, we also have that lim infq→2?
µq ≥ µ. It follows that µq → µ as
q → 2?, so that λ = µ. Summarizing, we proved that if µ < 0, thenthere exists u ∈ C∞(M), u > 0, such that
∆gu + hu = µu2?−1
and∫
M
u2?
dvg = 1. In particular, u is a minimizing solution of the
equation. Moreover, u is obtained as the uniform limit of a subsequenceof the u′qs.The null case: µ = 0.

11.3 Critical case 275
For the fixed number q ∈ (2, 2?) we consider the equation
∆gu + hu = µquq−1,
where µq is defined in (11.9).From Theorem 11.8 follows the existence of an element uq ∈ C∞(M), uq >
0 be such that
∆guq + huq = µquq−1q
and∫
M
uqqdvg = 1. First we claim that if µ = 0, then µq = 0 for all q.
Given ε > 0, we let uε ∈ H be such that I(uε) ≤ ε. Thanks to Sobolevinequality, there exists A > 0 such that for any u ∈ H2
1 (M ,
‖u‖22? ≤ A(‖u‖22 + ‖u‖22).Taking u = uε in the above inequality, we get that for any ε > 0,
1 ≤ A(ε + B‖uε‖22),where B = 1 + max
x∈M|h(x)|. Hence, there exists C > 0 such that ‖uε‖2 ≥
C for all ε > 0 sufficiently small. In particular, for q > 2, there existsCq > 0 such that ∫
M
|uε|qdvg ≥ Cq.
Independently, it is clear that µq ≤ I(‖uε‖−1q uε), so that ‖uε‖2qµq ≤ ε.
Fixing q > 2, and letting ε → 0, it follows that µq ≤ 0. On the otherhand,
µq = I(uq) = ‖uq‖22?I(‖uq‖−12? uq) ≥ ‖uq‖22?µ,
so that µq ≥ 0. This prove the above claim if µ = 0, then µq = 0 for allq. Letting u = ‖uq‖−1
2? uq for some q, we get that u is a positive smoothsolution of the equation
∆gu + hu = µu2?−1
such that∫
M
u2?
dvg = 1.
The positive case: µ > 0.In this case first we prove that the operator ∆g + h is coercive in thesense that, there exists λ > 0 such that for any u ∈ H2
1 (M),∫
M
(|∇u|2 + hu2)dvg ≥ λ‖u‖2H21.

276 Equations with Critical Exponent
From condition µ > 0 and from Holder’s inequalities follows the exis-tence of µ > 0 such that for any u ∈ H2
1 (M),∫
M
(|∇u|2 + hu2)dvg ≥ µ
∫
M
u2dvg.
We let ε ∈ (0, µ2 ) be such that (1− ε)µ + εh ≥ µ
2 . Then
∫
M
(|∇u|2 + hu2)dvg ≥ ε
∫
M
(|∇u|2 + hu2)dvg + (1− ε)∫
M
u2dvg
≥∫
M
|∇u|2dvg +µ
2
∫
M
u2dvg
≥ ε
∫
M
(|∇u|2 + u2)dvg.
In consequence, the operator ∆g + h is coercive.The main result in the case µ > 0 is the following:
Theorem 11.11 Let (M, g) be a smooth compact Riemannian manifoldof dimension n ≥ 3, and h : M → R be a smooth function. If
infu∈H
∫
M
(|∇u|2 + hu2)dvg <1
K2n
.
Then there exists u ∈ C∞(M), u > 0 such that
∆gu + hu = µu2?−1
and∫
Mu2?
dvg = 1. In particular, u is a minimizing solution of theequation.
Proof Let (ui) ⊂ H be a minimizing sequence for µ. Using againProposition 3.49 [18], we can replace ui by |ui|, so we can assume that theui’s are nonnegative. We have that (ui) is bounded in H2
1 (M). Takinginto account that H2
1 (M) is a Hilbert space, we may thus assume thatthere exists u ∈ H2
1 (M), such that
1) ui u weakly in H21 (M),
2) ui → u strongly in L2(M),3) ui → u almost everywhere as i → +∞.
In particular, u is nonnegative. From the weak convergence ui u
follows that
‖ui‖22 = ‖∇(ui − u)‖22 + ‖u‖22 + o(1),

11.4 Comments and historical notes 277
for all i, where o(1) → 0 as i → +∞. From Brezis-Lieb Lemma (seeTheorem B.2), it follows that
‖ui‖2?
2? = ‖ui − u‖2?
2? + ‖u‖2?
2? + o(1),
for all i, where, as above, o(1) → 0 as i → +∞. From Theorem 11.5follows that, there exists B > 0 such that for any i,
‖ui − u‖22? ≤ K2n‖∇(ui − u)‖22 + B‖ui − u‖22.
Since ui ∈ H, it follows that
(1− ‖u‖2?
2?)2/2? ≤ K2n
(‖∇ui‖22 − ‖∇u‖22)
+ o(1).
Since I(ui) → µ and ui → u strongly in L2(M), we also have that
K2n(‖∇ui‖22 − ‖∇u‖22) = K2
nµ−K2n
(∫
M
|∇u|2dvg +∫
M
hu2dvg
)+ o(1)
≤ K2nµ−K2
nµ‖u‖22? + o(1).
Hence,
(1− ‖u‖2?
2?)2/2? ≤ K2n(1− ‖u‖22?).
From the assumption µK2n < 1 follows that
1− ‖u‖22? ≤ (1− ‖u‖2?
2?)2/2?
.
From this we have ‖u‖2? = 1. Then, ‖ui‖2 → ‖u‖2 as i → +∞, andsince
‖∇ui‖22 = ‖∇(ui − u)‖22 + ‖∇u‖22 + o(1),
we get that ui → u strongly in H21 (M) as i → +∞. In particular, u is
a minimizer for µ, and u is a weak nonnegative solution of the equation
∆gu + hu = µu2?−1.
From Theorem 11.9 and Proposition 11.1 follows that u is smooth andpositive.
11.4 Comments and historical notes
In 1960, Yamabe [294] attempted to solve the problem Given a com-pact Riemannian manifold (M, g) of dimension n ≥ 3, then there existsa conformal metric with constant scalar curvature. Unfortunately, hisproof contained an error, discovered by Trudinger [284] and repair the

278 Equations with Critical Exponent
proof, but only with a rather restrictive assumption on the manifoldM . In 1976, Aubin [17] and Schoen [267] trait the remaining case. In1984, Cherrier [68] extend the Yamabe problem to the compact Riemannmanifold with boundary. In 1987 appear a very nice paper due to Leeand Parker [185] about the Yamabe problem, where heres gave a proofof the Yamabe problem unifying Aubin’s and Schoen’s arguments. TheYamabe problem on compact Riemannian manifold with boundary wasstudied in many papers by Escobar [104], [105], [106]. In 1993, Hebeyand Vaugon [138] studied the equivariant Yamabe problem. In the lastyears many papers are dedicated to study different aspects of Yamabeor Yamabe like problems. For this see the books of Ambrosetti and Mal-chiodi [6], Druet, Hebey, and Robert [96], and Hebey [135], [136] andalso the papers of Li and Li [188] and Il’yasov and Runst [142] and therereferences. Also many papers is dedicated to study the Yamabe invari-ant, see for example a very nice paper of Ammann, Dahl, and Humbert[10]. These problems suggest to study elliptic or semilinear elliptic prob-lems on a compact Riemannian manifold with or without boundary. Inthe present exists a very reach literature which are dedicated to studythese problem.

12
Problems to Part II
In mathematics the art ofproposing a question must beheld of higher value thansolving it.
Georg Cantor (1845–1918)
Problem 12.1 (Hopf’s lemma) Let (M, g) be a connected, compactRiemannian manifold and f : M → R a smooth function such that
∆gf ≥ 0.
Then f is constant.
Problem 12.2 Consider Sn the n-dimensional unit sphere endowed withthe Riemannian metric induced by the inclusion ι : Sn → Rn+1. Showthat for any smooth function f : Rn+1 → R we have
(∆Rn+1f)|Sn = ∆Sn(f |Sn)− ∂2f
∂r2|Sn − n
∂f
∂r|Sn ,
where ∆Rn+1 , ∆Sn and ∂∂r are the Laplace operator on Rn+1, Sn, and
the radial derivative, respectively.
Problem 12.3 Let Sn be the unit sphere endowed with the usual Rie-mannian structure from Rn+1. Denote by Hk the vector space of theharmonic polynomial of degree k ≥ 0 defined on Rn+1. Let Hk = f |Sn :f ∈ Hk.
a) Show that ∆Snf = k(n + k − 1)f, for all f ∈ Hk and hencek(n + k − 1) is an eigenvalue of the Laplace operator ∆Sn .
279

280 Problems to Part II
b) Hk is the eigenspace corresponding to the eigenvalue λk = k(n +k − 1).
c) The set k(n + k − 1) : k ∈ N is the set of eigenvalues of ∆Sn .
Problem 12.4 (M. Obata [227] ) If g is a metric on Sn that is conformalto the standard metric g and has constant scalar curvature, then up to aconstant scale factor, g is obtained from g by a conformal diffeomorphismof the sphere.
Problem 12.5 Let g0 be the standard Riemannian metric on Rn. Leth = (hij) be a symmetric bilinear form with compact support and con-sider the metric gε = g0 + εh on Rn. If Rgε
denotes the scalar curvatureof gε prove that
Rgε(x) = εR1(x) + ε2R2(x) + o(ε2),
where
R1(x) =∑
i,j
∂2hij
∂xi∂xj−∆trh,
and
R2 = −2∑
k,j,l
hkj∂2hij
∂2xl+
∑
k,j,l
hkj∂2hll
∂xj∂xk+
34
∑
k,j,l
∂hjl
∂xk
∂hjl
∂xk
−∑
k,j,l
∂hjl
∂xl
∂hjk
∂xk+
∑
k,j,l
∂hjl
∂xl
∂hkk
∂xj− 1
4
∑
k,j,l
∂hll
∂xj
∂hkk
∂xj− 1
2
∑
k,j,l
∂hkl
∂xj
∂hjk
∂xl.
Also the following formula holds.
|gε| 12 = 1 +ε
2trh + ε2
(18(trh)2 − 1
4tr(h2)
)+ o(ε2).
Problem 12.6 Let (M,g) be a compact Riemannian manifold with
boundary n ≥ 3. Let 0 ∈ ∂M be a point. We assume that 1 ≤ i, j, k, l ≤n− 1. Let (x1, x2, . . . , xn−1) be normal coordinate on ∂M at the point0. Let γ(t) be the geodesics leaving from (x1, x2, . . . , xn−1) in the or-thogonal direction to ∂M and parameterized by the arc length. In thiscase (x1, x2, . . . , xn−1) will be called Fermi coordinates at 0 ∈ ∂M . Inthese coordinates the arc length is written as
ds2 = dt2 + gij(x, t)dxidxj .

Problems to Part II 281
If g = det(g) then g = det(gij). If xi and t are sufficiently small, then
the following formula holds
√g = 1−Ht+
12(H2−‖π‖2−Ric(η))t2−Hitxi− 1
6Rijxixj +O(|(x, t)|3),
where π is the second fundamental form, H is its trace and Rij are thecoefficients of the Ricci tensor of ∂M .
Problem 12.7 Let (M, g) be a connected compact n-dimensional Rie-mannian manifold without boundary. An eigenvalue of the p-Laplaceoperator ∆pu := div g(|∇u|p−2∇u) is a real number λ such that thereexists u ∈ W p
1 (M) \ 0 such that
−∆pu = λ|u|p−2u.
We denote by σp(M, g) the set of all nonzero eigenvalues. The setσp(M, g) is not empty, unbounded and included in (0, +∞). If λ1 =inf σp(M, g) prove that λ1 ∈ σp(M, g) and
λ1 = min∫
M
|∇ϕ|pdvg : ϕ ∈ Σ0
where
Σ0 =
ϕ ∈ W p1 (M) :
∫
M
|ϕ|pdvg = 1,
∫
M
|ϕ|p−2ϕdvg = 0
.
If ω ⊂ M is a non-empty open subset, define
µ(ω) = min∫
ω
|∇ϕ|p : ϕ ∈ W 1,p0 (ω),
∫
ω
|ϕ|pdvg = 1
.
Prove that
λ1 = min(ω,ω)
maxµ(ω), µ(ω),
where (ω, ω) runs over the set of couples of non-empty disjoint opensubset of M and if u is any nonzero eigenfunction associated to λ1, thenM \ u−1(0) has two connected open components.
Problem 12.8 Let (M, g) be an n-dimensional compact Riemannianmanifold without boundary, K : M → R a continuous function (K 6= 0)and λ ∈ R. We consider the following equation
∆gu + λu + K(x)uq = 0.

282 Problems to Part II
a) If λ = 0 and 1 < q < n+2n−2 then the equation admits a positive
solutions if and only if the following conditions hold:
i)∫
MKdvg < 0;
ii) there exists x0 ∈ M such that K(x0) > 0.
b) If λ < 0 and 1 < q < n+2n−2 then the equation admits positive
solutions if and only if the condition ii) holds.
Problem 12.9 Let Ω ⊂ RN be a bounded domain with smooth bound-ary and let λ1 denote the first eigenvalue of (−∆) in H1
0 (Ω). Letf : R→R be a differentiable function such that f(0) = 0, f ′(0) < λ1,and
λ1 < limu→+∞
f(u)u
< ∞ .
Prove that the problem
−∆u = f(u) in Ωu > 0 in Ωu = 0 on ∂Ω
has a solution.
Problem 12.10 Let Ω ⊂ RN be a bounded domain with smooth bound-ary and assume that p is a real number such that 1 < p < (N+2)/(N−2)if N ≥ 3 and 1 < p < ∞ if N ∈ 1, 2.
Prove that there exists λ∗ > 0 such that the problem −∆u = λ(1 + u)p in Ω
u = 0 on ∂Ω
has at least two solutions for any λ ∈ (0, λ∗).
Problem 12.11 Let Ω ⊂ RN be a bounded domain with smooth bound-ary and assume that p is a real number such that 1 < p < (N+2)/(N−2)if N ≥ 3 and 1 < p < ∞ if N ∈ 1, 2. Consider the problem
−∆u = up + f(x) in Ωu > 0 in Ωu = 0 on ∂Ω,
(12.1)
where f is a smooth function.Prove that there exists δ > 0 such that problem (12.1) has a solution,
provided that ‖f‖L∞ ≤ δ.

Problems to Part II 283
Problem 12.12 Let Ω ⊂ RN be a bounded domain with smooth bound-ary and assume that p is a real number such that 1 < p < (N+2)/(N−2)if N ≥ 3 and 1 < p < ∞ if N ∈ 1, 2. Consider the problem
−∆u = |u|p + f(x) in Ωu = 0 on ∂Ω,
(12.2)
where f is a smooth function.Denote
K = f ∈ C0,α(Ω); problem (12.2) has a solutionand
P = h ∈ C0,α(Ω); h ≥ 0 in Ω .
a) Prove that K is a convex set and K \ P ⊂ K.b) Prove that for every f ∈ IntK, problem (12.2) has at least two
solutions. In particular, if f ≤ 0 in Ω, then problem (12.2) hasat least two solutions.

13
Mathematical Preliminaries
Knowledge is power. (IpsaScientia Potestas Est)
Sir Francis Bacon(1561–1626), Meditationes
Sacræ. De Hæresibus
13.1 Metrics, geodesics, flag curvature
Let M be a connected m-dimensional C∞ manifold and let TM =⋃p∈M TpM be its tangent bundle. If the continuous function F : TM →
[0,∞) satisfies the conditions that it is C∞ on TM \0; F (tu) = tF (u)for all t ≥ 0 and u ∈ TM, i.e., F is positively homogeneous of degreeone; and the matrix gij(u) := [ 12F 2]yiyj (u) is positive definite for allu ∈ TM \ 0, then we say that (M, F ) is a Finsler manifold. If F isabsolutely homogeneous, then (M, F ) is said to be reversible. Let π∗TM
be the pull-back of the tangent bundle TM by π : TM \ 0 → M ; then
g(p,y) := gij(p,y)dpi ⊗ dpj := [12F 2]yiyj dpi ⊗ dpj , p ∈ M, y ∈ TpM,
(13.1)is the natural Riemannian metric on the pulled-back bundle π∗TM .
Unlike the Levi-Civita connection in Riemann geometry, there is nounique natural connection in the Finsler case. Among these connec-tions on π∗TM, we choose the Chern connection whose coefficients aredenoted by Γk
ij ; see [22, p.38]). This connection induces the curvaturetensor, denoted by R; see [22, Chapter 3]. The Chern connection de-fines the covariant derivative DV U of a vector field U in the directionV ∈ TpM. Since, in general, the Chern connection coefficients Γi
jk in
284

13.1 Metrics, geodesics, flag curvature 285
natural coordinates have a directional dependence, we must say explic-itly that DV U is defined with a fixed reference vector. In particular, letσ : [0, r] → M be a smooth curve with velocity field T = T (t) = σ(t).Suppose that U and W are vector fields defined along σ. We define DT U
with reference vector W as
DT U =[dU i
dt+ U jT k(Γi
jk)(σ,W )
]∂
∂pi |σ(t)
,
where
∂∂pi |σ(t)
i=1,m
is a basis of Tσ(t)M. A C∞ curve σ : [0, r] → M,
with velocity T = σ is a (Finslerian) geodesic if
DT
[T
F (T )
]= 0 with reference vector T . (13.2)
If the Finslerian velocity of the geodesic σ is constant, then (13.2) be-comes
d2σi
dt2+
dσj
dt
dσk
dt(Γi
jk)(σ,T ) = 0, i = 1, ..., m = dimM. (13.3)
For any p ∈ M and y ∈ TpM we may define the exponential mapexpp : TpM → M , expp(y) = σ(1, p, y), where σ(t, p, y) is the uniquesolution (geodesic) of the second order differential equation (13.2) (or,(13.3)) which passes through p at t = 0 with velocity y.
If U, V and W are vector fields along a curve σ, which has velocityT = σ, we have the derivative rule
d
dtg(σ,W )(U, V ) = g(σ,W )(DT U, V ) + g(σ,W )(U,DT V ) (13.4)
whenever DT U and DT V are with reference vector W and one of thefollowing conditions holds:
• U or V is proportional to W, or• W = T and σ is a geodesic.
Let γ : [0, 1] → M be a smooth regular curve and Σ : [0, 1]× [−ε, ε] →M be a smooth regular variation of γ (i.e. Σ(t, 0) = γ(t) for all t ∈ [0, 1])with variation vector field U = U(t, u) = ∂Σ
∂u . Then
∂
∂ug(σ,T )(T, T ) = 2g(σ,T )(T, DUT ), (13.5)
where T = ∂Σ∂t and the covariant derivative DUT is with reference vector
T .

286 Mathematical Preliminaries
A vector field J along a geodesic σ : [0, r] → M (with velocity fieldT ) is said to be a Jacobi field if it satisfies the equation
DT DT J + R(J, T )T = 0, (13.6)
where R is the curvature tensor. Here, the covariant derivative DT isdefined with reference vector T.
We say that q is conjugate to p along the geodesic σ if there exists anonzero Jacobi field J along σ which vanishes at p and q.
Let γ : [0, r] → M be a piecewise C∞ curve. Its integral length isdefined as
LF (γ) =∫ r
0
F (γ(t), γ(t)) dt.
Let Σ : [0, r] × [−ε, ε] → M (ε > 0) be a piecewise C∞ variation ofa geodesic γ : [0, r] → M with Σ(·, 0) = γ. Let T = T (t, u) = ∂Σ
∂t , U =U(t, u) = ∂Σ
∂u the velocities of the t-curves and u-curves, respectively.The formula for the first variation of arc length, see Bao-Chern-Shen[22, Exercise 5.1.4], gives us
L′F (Σ(·, 0)) :=d
duLF (Σ(·, u))|u=0 =
[gT
(U,
T
F (T )
)
|u=0
]∣∣∣∣∣
t=r
t=0
. (13.7)
For p, q ∈ M , denote by Γ(p, q) the set of all piecewise C∞ curvesγ : [0, r] → M such that γ(0) = p and γ(r) = q. Define the mapdF : M ×M → [0,∞) by
dF (p, q) = infγ∈Γ(p,q)
LF (γ). (13.8)
Of course, we have dF (p, q) ≥ 0, where equality holds if and only if p = q,
and the triangle inequality holds, i.e., dF (p0, p2) ≤ dF (p0, p1)+dF (p1, p2)for every p0, p1, p2 ∈ M. In general, since F is only a positive homoge-neous function, dF (p, q) 6= dF (q, p); thus, (M, dF ) is only a quasi-metricspace. If (M, g) is a Riemannian manifold, we will use the notation dg
instead of dF which becomes a usual metric function.For p ∈ M, r > 0, we define the forward and backward Finsler-metric
ball s, respectively, with center p ∈ M and radius r > 0, by
B+p (r) = q ∈ M : dF (p, q) < r and B−p (r) = q ∈ M : dF (q, p) < r.
We denote by Bp(r) := y ∈ TpM : F (p, y) < r the open tangentball at p ∈ M with radius r > 0. It is well-known that the topologygenerated by the forward (resp. backward) metric balls coincide withthe underlying manifold topology, respectively.

13.1 Metrics, geodesics, flag curvature 287
By Whitehead’s theorem (see [292] or [22, Exercise 6.4.3, p. 164]) and[22, Lemma 6.2.1, p. 146] we can conclude the following useful localresult (see also [179]).
Proposition 13.1 Let (M,F ) be a Finsler manifold, where F is posi-tively (but perhaps not absolutely) homogeneous of degree one. For everypoint p ∈ M there exist a small ρp > 0 and cp > 1 (depending only onp) such that for every pair of points q0, q1 in B+
p (ρp) we have
1cp
dF (q1, q0) ≤ dF (q0, q1) ≤ cpdF (q1, q0). (13.9)
Moreover, for every real number k ≥ 1 and q ∈ B+p (ρp/k) the mapping
expq is C1-diffeomorphism from Bq(2ρp/k) onto B+q (2ρp/k) and every
pair of points q0, q1 in B+p (ρp/k) can be joined by a unique minimal
geodesic from q0 to q1 lying entirely in B+p (ρp/k).
A set M0 ⊆ M is forward bounded if there exist p ∈ M and r > 0 suchthat M0 ⊆ B+
p (r). Similarly, M0 ⊆ M is backward bounded if there existp ∈ M and r > 0 such that M0 ⊆ B−p (r).
A set M0 ⊆ M is geodesic convex if for any two points of M0 thereexists a unique geodesic joining them which belongs entirely to M0.
Let (p, y) ∈ TM \ 0 and let V be a section of the pulled-back bundleπ∗TM . Then,
K(y, V ) =g(p,y)(R(V, y)y, V )
g(p,y)(y, y)g(p,y)(V, V )− [g(p,y)(y, V )]2(13.10)
is the flag curvature with flag y and transverse edge V . In particular,when the Finsler structure F arises from a Riemannian metric g (i.e.,the fundamental tensor gij = [ 12F 2]yiyj does not depend on the directiony), the flag curvature coincides with the usual sectional curvature.
If K(V, W ) ≤ 0 for every 0 6= V, W ∈ TpM, and p ∈ M , with V andW not collinear, we say that the flag curvature of (M, F ) is non-positive.
A Finsler manifold (M, F ) is said to be forward (resp. backward)geodesically complete if every geodesic σ : [0, 1] → M parameterized tohave constant Finslerian speed, can be extended to a geodesic defined on[0,∞) (resp. (−∞, 1]). (M, F ) is geodesically complete if every geodesicσ : [0, 1] → M can be extended to a geodesic defined on (−∞,∞). Inthe Riemannian case, instead of geodesically complete we simply saycomplete Riemannian manifold.

288 Mathematical Preliminaries
Theorem 13.1 (Theorem of Hopf-Rinow, [22, p. 168]) Let (M, F )be a connected Finsler manifold, where F is positively (but perhaps notabsolutely) homogeneous of degree one. The following two criteria areequivalent:
(a) (M, F ) is forward (backward) geodesically complete;(b) Every closed and forward (backward) bounded subset of (M,dF )
is compact.
Moreover, if any of the above holds, then every pair of points in M canbe joined by a minimizing geodesic.
Theorem 13.2 (Theorem of Cartan-Hadamard, [22, p. 238]) Let(M, F ) be a forward/backward geodesically complete, simply connectedFinsler manifold of non-positive flag curvature. Then:
(a) Geodesics in (M,F ) do not contain conjugate points.(b) The exponential map expp : TpM → M is a C1 diffeomorphism
from the tangent space TpM onto the manifold M .
A Finsler manifold (M, F ) is a Minkowski space if M is a vector spaceand F is a Minkowski norm inducing a Finsler structure on M by trans-lation; its flag curvature is identically zero, the geodesics are straightlines, and for any two points p, q ∈ M , we have F (q − p) = dF (p, q),see Bao-Chern-Shen [22, Chapter 14]. In particular, (M, F ) is both for-ward and backward geodesically complete. The fundamental inequalityfor Minkowski norms implies
|gy(y, w)| ≤√
gy(y, y) ·√
gw(w,w) = F (y) · F (w) for all y 6= 0 6= w,
(13.11)which is the generalized Cauchy-Schwarz inequality, see Bao-Chern-Shen[22, p. 6-10].
A Finsler manifold is of Berwald type if the Chern connection coeffi-cients Γk
ij in natural coordinates depend only on the base point. SpecialBerwald spaces are the (locally) Minkowski spaces and the Riemannianmanifolds. In the latter case, the Chern connection coefficients Γk
ij co-incide the usual Christofel symbols
Γk
ij(p) =12
[(∂gmj
∂pj
)
p
+(
∂gmi
∂pj
)
p
−(
∂gij
∂pm
)
p
]gmk(p)
where the gij ’s are such that gimgmj = δij .A Riemannian manifold is said to be of Hadamard-type, if it is simply
connected, complete, having non-positive sectional curvature.

13.2 Busemann-type inequalities on Finsler manifolds 289
Theorem 13.3 (Cosine inequality, see [91, Lemma 3.1]) Let (M, g) bea Hadamard-type Riemannian manifold. Consider the geodesic triangledetermined by vertices a, b, c ∈ M . If c is the angle belonging to vertexc and if A = dg(b, c), B = dg(a, c), C = dg(a, b), then
A2 + B2 − 2AB cos c ≤ C2.
The following result is probably know, but since we have not foundan explicit reference, we give its proof.
Proposition 13.2 Let (M, g) be a complete, finite-dimensional Rieman-nian manifold. Then any geodesic convex set K ⊂ M is contractible.
Proof Let us fix p ∈ K arbitrarily. Since K is geodesic convex, everypoint q ∈ K can be connected to p uniquely by the geodesic segmentγq : [0, 1] → K, i.e., γq(0) = p, γq(1) = q. Moreover, the map K 3q 7→ exp−1
p (q) ∈ TpM is well-defined and continuous. Note actuallythat γq(t) = expp(t exp−1
p (q)). We define the map F : [0, 1] × K → K
by F (t, q) = γq(t). It is clear that F is continuous, F (1, q) = q andF (0, q) = p for all q ∈ K, i.e., the identity map idK is homotopic to theconstant map p.
13.2 Busemann-type inequalities on Finsler manifolds
In the forties, Busemann developed a synthetic geometry on metricspaces. In particular, he axiomatically elaborated a whole theory ofnon-positively curved metric spaces which have no differential structurea priori and they possess the essential qualitative geometric propertiesof Finsler manifolds. These spaces are the so-called G-spaces, see Buse-mann [54, p. 37]. This notion of non-positive curvature requires that insmall geodesic triangles the length of a side is at least the twice of thegeodesic distance of the mid-points of the other two sides, see Busemann[54, p. 237].
To formulate in a precise way this notion, let (M,d) be a quasi-metricspace and for every p ∈ M and radius r > 0, we introduce the forwardand backward metric ball s
B+p (r) = q ∈ M : d(p, q) < r and B−
p (r) = q ∈ M : d(q, p) < r.
A continuous curve γ : [a, b] → M with γ(a) = x, γ(b) = y is a shortest

290 Mathematical Preliminaries
geodesic, if l(γ) = d(x, y), where l(γ) denotes the generalized length of γ
and it is defined by
l(γ) = supn∑
i=1
d(γ(ti−1), γ(ti)) : a = t0 < t1 < ... < tn = b, n ∈ N.
In the sequel, we always assume that the shortest geodesics are parametrizedproportionally to arclength, i.e., l(γ|[0,t]) = tl(γ).
Remark 13.1 A famous result of Busemann-Meyer (see [55, Theorem2, p. 186]) from Calculus of Variations shows that the generalized lengthl(γ) and the integral length LF (γ) of any (piecewise) C∞ curves coin-cide for Finsler manifolds. Therefore, the minimal Finsler geodesic andshortest geodesic notions coincide.
We say that (M,d) is a locally geodesic (length) space if for every pointp ∈ M there is a ρp > 0 such that for every two points x, y ∈ B+
p (ρp)there exists a shortest geodesic joining them.
Definition 13.1 A locally geodesic space (M, d) is said to be a Buse-mann non-positive curvature space (shortly, Busemann NPC space), iffor every p ∈ M there exists ρp > 0 such that for any two shortestgeodesics γ1, γ2 : [0, 1] → M with γ1(0) = γ2(0) = x ∈ B+
p (ρp) and withendpoints γ1(1), γ2(1) ∈ B+
p (ρp) we have
2d(γ1(12), γ2(
12)) ≤ d(γ1(1), γ2(1)).
(We shall say that γ1 and γ2 satisfy the Busemann NPC inequality).
Let (M, g) be a Riemannian manifold and (M, dg) the metric spaceinduced by itself. In this context, the Busemann NPC inequality iswell-known. Namely, we have
Proposition 13.3 [54, Theorem (41.6)] (M, dg) is a Busemann non-positive curvature space if and only if the sectional curvature of (M, g)is non-positive.
However, the picture for Finsler spaces is not so nice as in Proposition13.3 for Riemannian manifolds. To see this, we consider the Hilbertmetric of the interior of a simple, closed and convex curve C in theEuclidean plane. In order to describe this metric, let MC ⊂ R2 be theregion defined by the interior of the curve C and fix x1, x2 ∈ Int(MC).Assume first that x1 6= x2. Since C is a convex curve, the straight

13.2 Busemann-type inequalities on Finsler manifolds 291
line passing to the points x1, x2 intersects the curve C in two point;denote them by u1, u2 ∈ C. Then, there are τ1, τ2 ∈ (0, 1) such thatxi = τiu1 + (1− τi)u2 (i = 1, 2).
The Hilbert distance between x1 and x2 is
dH(x1, x2) =∣∣∣∣log
(1− τ1
1− τ2· τ2
τ1
)∣∣∣∣ .
We complete this definition by dH(x, x) = 0 for every x ∈ Int(MC).One can easily prove that (Int(MC), dH) is a metric space and it is aprojective Finsler metric with constant flag curvature −1. However, dueto Kelly-Straus, we have
Proposition 13.4 (see [156]) The metric space (Int(MC), dH) is a Buse-mann non-positive curvature space if and only if the curve C ⊂ R2 is anellipse.
This means that, although for Riemannian spaces the non-positivityof the sectional curvature and Busemann’s curvature conditions are mu-tually equivalent, the non-positivity of the flag curvature of a genericFinsler manifold is not enough to guarantee Busemann’s property.
Therefore, in order to obtain a characterization of Busemann’s curva-ture condition for Finsler spaces, we have two possibilities:
(I) To find a new notion of curvature in Finsler geometry such thatfor an arbitrary Finsler manifold the non-positivity of this cur-vature is equivalent with the Busemann non-positive curvaturecondition, as it was proposed by Z. Shen, see [276, Open Prob-lem 41]; or,
(II) To keep the flag curvature, but put some restrictive condition onthe Finsler metric.
In spite of the fact that (reversible) Finsler manifolds are included inG-spaces, only few results are known which establish a link betweenthe differential invariants of a Finsler manifold and the metric prop-erties of the induced metric space. The main result of this section isdue Kristaly-Kozma [170] (see also Kristaly-Varga-Kozma [179]), whichmakes a strong connection between an analytical property and a syn-thetic concept of non-positively curved metric spaces. Namely, we have
Theorem 13.4 Let (M, F ) be a Berwald space with non-positive flagcurvature, where F is positively (but perhaps not absolutely) homoge-neous of degree one. Then (M, dF ) is a Busemann NPC space.

292 Mathematical Preliminaries
Proof Let us fix p ∈ M and consider ρp > 0, cp > 1 from Proposition13.1. We will prove that ρ′p = ρp
cpis a good choice in Definition 13.1. To
do this, let γ1, γ2 : [0, 1] → M be two (minimal) geodesics with γ1(0) =γ2(0) = x ∈ B+
p (ρ′p) and γ1(1), γ2(1) ∈ B+p (ρ′p). By Proposition 13.1, we
can construct a unique geodesic γ : [0, 1] → M joining γ1(1) with γ2(1)and dF (γ1(1), γ2(1)) = L(γ). Clearly, γ(s) ∈ B+
p (ρ′p) for all s ∈ [0, 1] (weapplied Proposition 13.1 for k = cp). Moreover, x ∈ B+
γ(s)(2ρp). Indeed,by (13.9), we obtain
dF (γ(s), x) ≤ dF (γ(s), p)+dF (p, x) ≤ cpdF (p, γ(s))+ρ′p ≤ (cp+1)ρ′p < 2ρp.
Therefore, we can define Σ : [0, 1]× [0, 1] → M by
Σ(t, s) = expγ(s)((1− t) · exp−1γ(s)(x)).
The curve t 7→ Σ(1 − t, s) is a radial geodesic which joins γ(s) withx. Taking into account that (M, F ) is of Berwald type, the reverse oft 7→ Σ(1− t, s), i.e. t 7→ Σ(t, s) is a geodesic too (see [22, Exercise 5.3.3,p. 128]) for all s ∈ [0, 1]. Moreover, Σ(0, 0) = x = γ1(0), Σ(1, 0) =γ(0) = γ1(1). From the uniqueness of the geodesic between x and γ1(1),we have Σ(· , 0) = γ1. Analogously, we have Σ(· , 1) = γ2. Since Σ is ageodesic variation (of the curves γ1 and γ2), the vector field Js, definedby
Js(t) =∂
∂sΣ(t, s) ∈ TΣ(t,s)M
is a Jacobi field along Σ(· , s), s ∈ [0, 1] (see [22, p. 130]). In particular,we have Σ(1, s) = γ(s), Js(0) = 0, Js(1) = ∂
∂sΣ(1, s) = dγds and Js( 1
2 ) =∂∂sΣ( 1
2 , s).
Now, we fix s ∈ [0, 1]. Since Js(0) = 0 and the flag curvature in non-positive, then the geodesic Σ(·, s) has no conjugated points, see Theorem13.2. Therefore,
Js(t) 6= 0 for all t ∈ (0, 1].
Hence gJs(Js, Js)(t) is well defined for every t ∈ (0, 1]. Moreover,
F (Js)(t) := F (Σ(t, s), Js(t)) = [gJs(Js, Js)]12 (t) 6= 0 ∀ t ∈ (0, 1].
(13.12)Let Ts the velocity field of Σ(·, s). Applying twice formula (13.4), we

13.2 Busemann-type inequalities on Finsler manifolds 293
obtain
d2
dt2[gJs(Js, Js)]
12 (t) =
d2
dt2F (Js)(t) =
d
dt
[gJs(DTsJs, Js)
F (Js)
](t) =
[gJs(DTsDTsJs, Js) + gJs(DTsJs, DTsJs)] · F (Js)− g2Js
(DTsJs, Js) · F (Js)−1
F 2(Js)(t) =
gJs(DTsDTsJs, Js) · F 2(Js) + gJs(DTsJs, DTsJs) · F 2(Js)− g2Js
(DTsJs, Js)
F 3(Js)(t),
where the covariant derivatives (for generic Finsler manifolds) are withreference vector Js. Since (M,F ) is a Berwald space, the Chern con-nection coefficients do not depend on the direction, i.e., the notion ofreference vector becomes irrelevant. Therefore, we can use the Jacobiequation (13.6), concluding that
gJs(DTs
DTsJs, Js) = −gJs
(R(Js, Ts)Ts, Js).
Using the symmetry property of the curvature tensor, the formula of theflag curvature, and the Schwarz inequality we have
−gJs(R(Js, Ts)Ts, Js) = −gJs(R(Ts, Js)Js, Ts)
= −K(Js, Ts) · [gJs(Js, Js)gJs(Ts, Ts)− g2Js
(Js, Ts)] ≥ 0.
For the last two terms of the numerator we apply again the Schwarzinequality and we conclude that
d2
dt2F (Js)(t) ≥ 0 for all t ∈ (0, 1].
Since Js(t) 6= 0 for t ∈ (0, 1], the mapping t 7→ F (Js)(t) is C∞ on (0, 1].From the above inequality and the second order Taylor expansion aboutv ∈ (0, 1], we obtain
F (Js)(v) + (t− v)d
dtF (Js)(v) ≤ F (Js)(t) for all t ∈ (0, 1]. (13.13)
Letting t → 0 and v = 1/2 in (13.13), by the continuity of F, we obtain
F (Js)(12)− 1
2d
dtF (Js)(
12) ≤ 0.
Let v = 1/2 and t = 1 in (13.13), and adding the obtained inequalitywith the above one, we conclude that
2F (Σ(12, s),
∂
∂sΣ(
12, s)) = 2F (Js)(
12) ≤ F (Js)(1) = F (γ(s),
dγ
ds).

294 Mathematical Preliminaries
Integrating the last inequality with respect to s from 0 to 1, we obtain
2LF (Σ(12, ·)) = 2
∫ 1
0
F (Σ(12, s),
∂
∂sΣ(
12, s)) ds
≤∫ 1
0
F (γ(s),dγ
ds) ds
= LF (γ)
= dF (γ1(1), γ2(1)).
Since Σ( 12 , 0) = γ1( 1
2 ),Σ( 12 , 1) = γ2( 1
2 ) and Σ( 12 , ·) is a C∞ curve, by the
definition of the metric function dF , we conclude that γ1 and γ2 satisfythe Busemann NPC inequality. This concludes the proof of Theorem13.4.
In view of Theorem 13.4, Berwald spaces seem to be the first classof Finsler metrics that are non-positively curved in the sense of Buse-mann and which are neither flat nor Riemannian. Moreover, the aboveresult suggests a full characterization of the Busemann curvature no-tion for Berwald spaces. Indeed, we refer the reader to Kristaly-Kozma[170] where the converse of Theorem 13.4 is also proved; here we omitthis technical part since only the above result is applied for Economicalproblems.
Note that Theorem 13.4 includes a partial answer to the questionof Busemann [54] (see also [235, p. 87]), i.e., every reversible Berwaldspace of non-positive flag curvature has convex capsules (i.e., the lociequidistant to geodesic segments).
In the fifties, Aleksandrov introduced independently an other notionof curvature in metric spaces, based on the convexity of the distancefunction. It is well-known that the condition of Busemann curvature isweaker than the Aleksandrov one, see [150, Corollary 2.3.1]. Neverthe-less, in Riemannian spaces the Aleksandrov curvature condition holdsif and only if the sectional curvature is non-positive (see [52, Theorem1A.6]), but in the Finsler case the picture is quite rigid. Namely, if on areversible Finsler manifold (M,F ) the Aleksandrov curvature conditionholds (on the induced metric space by (M, F )) then (M, F ) it must beRiemannian, see [52, Proposition 1.14].
A direct consequence of Theorem 13.4 is
Corollary 13.1 Let (M, F ) be a forward/backward geodesically com-plete, simply connected Berwald space with non-positive flag curvature,

13.3 Variational inequalities 295
where F is positively (but perhaps not absolutely) homogeneous of degreeone. Then (M,dF ) is a global Busemann NPC space, i.e., the BusemannNPC inequality holds for any pair of geodesics.
The following result is crucial in Chapters 14 and 15.
Proposition 13.5 Let (M,F ) be a forward/backward geodesically com-plete, simply connected Berwald space with non-positive flag curvature,where F is positively (but perhaps not absolutely) homogeneous of de-gree one. Fix two geodesics γ1, γ2 : [0, 1] → M . Then, the functiont 7→ dF (γ1(t), γ2(t)) is convex.
Proof Due to Hopf-Rinow theorem (see Theorem 13.1), there exists ageodesic γ3 : [0, 1] → M joining γ1(0) and γ2(1). Moreover, due toCartan-Hadamard theorem (see Theorem 13.2), γ3 is unique. ApplyingCorollary 13.1 first to the pair γ1, γ3 and then to the pair γ3, γ2 (withopposite orientation), we obtain
dF (γ1(12), γ3(
12)) ≤ 1
2dF (γ1(1), γ3(1));
dF (γ3(12), γ2(
12)) ≤ 1
2dF (γ3(0), γ2(0)).
Note that the opposite of γ3 and γ2 are also geodesics, since (M, F )is of Berwald type, see [22, Example 5.3.3]. Now, using the triangleinequality, we obtain
dF (γ1(12), γ2(
12)) ≤ 1
2dF (γ1(1), γ2(1)) +
12dF (γ1(0), γ2(0)),
which means actually the 12 -convexity of the function t 7→ dF (γ1(t), γ2(t)).
Continuing in this way and taking a limit if necessarily, we conclude theconvexity of the above function.
13.3 Variational inequalities
Existence results for Nash equilibria are often derived from intersec-tion theorems (KKM theorems) or fixed point theorems. For instance,the original proof of Nash concerning equilibrium point is based on theBrouwer fixed point theorem. These theorems are actually equivalent tominimax theorems or variational inequalities, as Ky Fan minimax the-orem, etc. In this section we recall a few results which will be used inChapter 16.

296 Mathematical Preliminaries
A nonempty set X is acyclic if it is connected and its Cech homology(coefficients in a fixed field) is zero in dimensions greater than zero. Notethat every contractible set is acyclic (but the converse need not holdsin general). The following result is a Ky Fan type minimax theorem,proved by McClendon:
Theorem 13.5 [207, Theorem 3.1] Suppose that X is a compact acyclicfinite-dimensional ANR. Suppose h : X × X → R is a function suchthat (x, y) : h(y, y) > h(x, y) is open and x : h(y, y) > h(x, y)is contractible or empty for all y ∈ X. Then there is a y0 ∈ X withh(y0, y0) ≤ h(x, y0) for all x ∈ X.
In the sequel, we state some well-known results from the theory ofvariational inequalities. To do this, we consider a Gateaux differentiablefunction f : K → R where K is a closed convex subset of the topologicalvector space X.
Lemma 13.1 Let x0 ∈ K be a relative minimum point of f to K, i.e.,f(x) ≥ f(x0) for every x ∈ K. Then,
f ′(x0)(x− x0) ≥ 0, ∀x ∈ K. (13.14)
Furthermore, if f is convex, then the converse also holds.
Lemma 13.2 Let x0 ∈ K such that
f ′(x)(x− x0) ≥ 0, ∀x ∈ K. (13.15)
Then, x0 ∈ K is a relative minimum point of f to K. Furthermore, iff is convex, then the converse also holds.
Note that if we replace f ′ by an operator A : X → X∗, then (13.14)appearing in Lemma 13.1 is called a Stampacchia-type variational in-equality, while (13.15) from Lemma 13.2 is a Minty-type variationalinequality.

14
Minimization of Cost-functions on Manifolds
Geography has made usneighbors. History has madeus friends. Economics hasmade us partners, andnecessity has made us allies.Those whom God has sojoined together, let no manput asunder.
John F. Kennedy (1917–1963)
14.1 Introduction
Let us consider three markets P1, P2, P3 placed on an inclined plane(slope) with an angle α to the horizontal plane, denoted by (Sα). Assumethat three cars transport products from (resp. to) deposit P ∈ (Sα) to(resp. from) markets P1, P2, P3 ∈ (Sα) such that
• they move always in (Sα) along straight roads;• the Earth gravity acts on them (we omit other physical pertur-
bations such as friction, air resistance, etc.);• the transport costs coincide with the distance (measuring actually
the time elapsed to arrive) from (resp. to) deposit P to (resp.from) markets Pi (i = 1, 2, 3).
We emphasize that usually the two distances, i.e., from the deposit tothe markets and conversely, are not the same. The point here is that thetravel speed depends heavily on both the slope of the terrain and thedirection of travel. More precisely, if a car moves with a constant speedv [m/s] on a horizontal plane, it goes lt = vt + g
2 t2 sin α cos θ meters in
297

298 Minimization of Cost-functions on Manifolds
t seconds on (Sα), where θ is the angle between the straight road andthe direct downhill road (θ is measured in clockwise direction). The lawof the above phenomenon can be described relatively to the horizontalplane by means of the parametrized function
Fα(y1, y2) =y21 + y2
2
v√
y21 + y2
2 + g2y1 sinα
, (y1, y2) ∈ R2 \ (0, 0). (14.1)
Here, g ≈ 9.81m/s2. The distance (measuring the time to arrive) fromP = (P 1, P 2) to Pi = (P 1
i , P 2i ) is
dα(P, Pi) = Fα(P 1i − P 1, P 2
i − P 2),
and for the converse it is
dα(Pi, P ) = Fα(P 1 − P 1i , P 2 − P 2
i ).
Consequently, we have to minimize the functions
Cf (P ) =3∑
i=1
dα(P, Pi) and Cb(P ) =3∑
i=1
dα(Pi, P ), (14.2)
when P moves on (Sα). The function Cf (resp. Cb) denotes the totalforward (resp. backward) cost between the deposit P ∈ (Sα) and mar-kets P1, P2, P3 ∈ (Sα). The minimum points of Cf and Cb, respectively,may be far from each other (see Figure 14.1), due to the fact that Fα
(and dα) is not symmetric unless α = 0, i.e., Fα(−y1,−y2) 6= Fα(y1, y2)for each (y1, y2) ∈ R2 \ (0, 0).
We will use in general Tf (resp. Tb) to denote a minimum point ofCf (resp. Cb), which corresponds to the position of a deposit when wemeasure costs in forward (resp. backward) manner, see (14.2).
In the case α = 0 (when (Sα) is a horizontal plane), the functions Cf
and Cb coincide (the same is true for Tf and Tb). The minimum pointT = Tf = Tb is the well-known Torricelli point corresponding to thetriangle P1P2P3∆. Note that F0(y1, y2) =
√y21 + y2
2/v corresponds tothe standard Euclidean metric; indeed,
d0(P, Pi) = d0(Pi, P ) =√
(P 1i − P 1)2 + (P 2
i − P 2)2/v
measures the time, which is needed to arrive from P to Pi (and vice-versa) with constant velocity v.
Unfortunately, finding critical points as possible minima does not yieldany result: either the minimization function is not smooth enough (usu-ally, it is only a locally Lipschitz function) or the system, which would

14.1 Introduction 299
Fig. 14.1. We fix P1 = (−250,−50), P2 = (0,−100) and P3 = (−50, 100) onthe slope (Sα) with angle α = 35o. If v = 10, the minimum of the total for-ward cost on the slope is Cf ≈ 40.3265; the corresponding deposit is located atTf ≈ (−226.11,−39.4995) ∈ (Sα). However, the minimum of the total backwardcost on the slope is Cb ≈ 38.4143; the corresponding deposit has the coordinatesTb ≈ (−25.1332,−35.097) ∈ (Sα).
give the critical points, becomes very complicated even in quite simplecases (see (14.5) below). Consequently, the main purpose of the presentchapter is to study the set of these minima (existence, location) in vari-ous geometrical settings.
Note, that the function appearing in (14.1) is a typically Finsler met-ric on R2, introduced and studied first by Matsumoto [204]. In this way,elements from Riemann-Finsler geometry are needed in order to handlethe question formulated above. In the next sections we prove some neces-sarily, existence, uniqueness and multiplicity results for the economicalproblem on non-positively curved Berwald space which model variousreal life phenomena. Simultaneously, relevant numerical examples andcounterexamples are constructed by means of evolutionary methods andcomputational geometry tools, emphasizing the applicability and sharp-ness of our results.

300 Minimization of Cost-functions on Manifolds
14.2 A necessary condition
Let (M, F ) be an m-dimensional connected Finsler manifold, where F
is positively (but perhaps not absolutely) homogeneous of degree one.In this section we prove some results concerning the set of minima for
functions
Cf (Pi, n, s)(P ) =n∑
i=1
dsF (P, Pi) and Cb(Pi, n, s)(P ) =
n∑
i=1
dsF (Pi, P ),
where s ≥ 1 and Pi ∈ M, i = 1, . . . , n, correspond to n ∈ N markets.The value Cf (Pi, n, s)(P ) (resp. Cb(Pi, n, s)(P )) denotes the total s-forward (resp. s-backward) cost between the deposit P ∈ M and themarkets Pi ∈ M, i = 1, ..., n. When s = 1, we simply say total forward(resp. backward) cost.
By using the triangle inequality, for every x0, x1, x2 ∈ M we have
|dF (x1, x0)− dF (x2, x0)| ≤ maxdF (x1, x2), dF (x2, x1). (14.3)
Given any point P ∈ M , there exists a coordinate map ϕP definedon the closure of some precompact open subset U containing P suchthat ϕP maps the set U diffeomorphically onto the open Euclidean ballBm(r), r > 0, with ϕP (P ) = 0Rm . Moreover, there is a constant c > 1,depending only on P and U such that
c−1‖ϕP (x1)− ϕP (x2)‖ ≤ dF (x1, x2) ≤ c‖ϕP (x1)− ϕP (x2)‖ (14.4)
for every x1, x2 ∈ U ; see [22, p. 149]. Here, ‖ · ‖ denotes the Eu-clidean norm on Rm. We claim that for every Q ∈ M, the functiondF (ϕ−1
P (·), Q) is a Lipschitz function on ϕP (U) = Bm(r). Indeed, forevery yi = ϕP (xi) ∈ ϕP (U), i = 1, 2, due to (14.3) and (14.4), one has
|dF (ϕ−1P (y1), Q)− dF (ϕ−1
P (y2), Q)| = |dF (x1, Q)− dF (x2, Q)| ≤
≤ maxdF (x1, x2), dF (x2, x1) ≤ c‖y1 − y2‖.Consequently, for every Q ∈ M, there exists the generalized gradientof the locally Lipschitz function dF (ϕ−1
P (·), Q) on ϕP (U) = Bm(r), seeClarke [71, p. 27], i.e., for every y ∈ ϕP (U) = Bm(r) we have
∂dF (ϕ−1P (·), Q)(y) = ξ ∈ Rm : d0
F (ϕ−1P (·), Q)(y; h) ≥ 〈ξ, h〉 for all h ∈ Rm,
where 〈·, ·〉 denotes the standard inner product on Rm and
d0F (ϕ−1
P (·), Q)(y; h) = lim supz→y, t→0+
dF (ϕ−1P (z + th), Q)− dF (ϕ−1
P (z), Q)t

14.3 Existence and uniqueness results 301
is the generalized directional derivative.
Theorem 14.1 (Necessary Condition) Assume that Tf ∈ M is a mini-mum point for Cf (Pi, n, s) and ϕTf
is a map as above. Then
0Rm ∈n∑
i=1
ds−1F (Tf , Pi)∂dF (ϕ−1
Tf(·), Pi)(ϕTf
(Tf )). (14.5)
Proof Since Tf ∈ M is a minimum point of the locally Lipschitz functionCf (Pi, n, s), then
0Rm ∈ ∂
(n∑
i=1
dsF (ϕ−1
Tf(·), Pi)
)(ϕTf
(Tf )),
see [71, Proposition 2.3.2]. Now, using the basic properties of the gener-alized gradient, see [71, Proposition 2.3.3] and [71, Theorem 2.3.10], weconclude the proof.
Remark 14.1 A result similar to Theorem 14.1 can also be obtainedfor Cb(Pi, n, s).
Example 14.1 Let M = Rm, m ≥ 2, be endowed with the naturalEuclidean metric. Taking into account (14.5), a simple computationshows that the unique minimum point Tf = Tb (i.e., the place of thedeposit) for Cf (Pi, n, 2) = Cb(Pi, n, 2) is the centre of gravity of marketsP1, ..., Pn, i.e., 1
n
∑ni=1 Pi. In this case, ϕTf
can be the identity mapon Rm.
Remark 14.2 The system (14.5) may become very complicate even forsimple cases; it is enough to consider the Matsumoto metric given by(14.1). In such cases, we are not able to give an explicit formula forminimal points.
14.3 Existence and uniqueness results
The next result gives an alternative concerning the number of minimumpoints of the function Cf (Pi, n, s) in a general geometrical framework.(Similar result can be obtained for Cb(Pi, n, s).) Namely, we have thefollowing theorem.

302 Minimization of Cost-functions on Manifolds
Theorem 14.2 Let (M, F ) be a simply connected, geodesically completeBerwald manifold of nonpositive flag curvature, where F is positively(but perhaps not absolutely) homogeneous of degree one. Then
(a) there exists either a unique or infinitely many minimum pointsfor Cf (Pi, n, 1);
(b) there exists a unique minimum point for Cf (Pi, n, s) whenevers > 1.
Proof First of all, we observe that M is not a backward bounded set.Indeed, if we assume that it is, then M is compact due to Hopf-Rinowtheorem, see Theorem 13.1. On the other hand, due Cartan-Hadamardtheorem, see Theorem 13.2, the exponential map expp : TpM → M
is a diffeomorphism for every p ∈ M. Thus, the tangent space TpM =exp−1
p (M) is compact, a contradiction. Since M is not backward bounded,in particular, for every i = 1, ..., n, we have that
supP∈M
dF (P, Pi) = ∞.
Consequently, outside of a large backward bounded subset of M , denotedby M0, the value of Cf (Pi, n, s) is large. But, M0 being compact, thecontinuous function Cf (Pi, n, s) attains its infimum, i.e., the set of theminima for Cf (Pi, n, s) is always nonempty.
On the other hand, due to Proposition 13.5 for every nonconstantgeodesic σ : [0, 1] → M and p ∈ M , the function t 7→ dF (σ(t), p) isconvex and t 7→ ds
F (σ(t), p) is strictly convex, whenever s > 1 (see also[150, Corollary 2.2.6]).
(a) Let us assume that there are at least two minimum points forCf (Pi, n, 1), denoting them by T 0
f and T 1f . Let σ : [0, 1] → M be a
geodesic with constant Finslerian speed such that σ(0) = T 0f and σ(1) =
T 1f . Then, for every t ∈ (0, 1) we have
Cf (Pi, n, 1)(σ(t)) =n∑
i=1
dF (σ(t), Pi)
≤ (1− t)n∑
i=1
dF (σ(0), Pi) + t
n∑
i=1
dF (σ(1), Pi)(14.6)
= (1− t)min Cf (Pi, n, 1) + t min Cf (Pi, n, 1)
= min Cf (Pi, n, 1).
Consequently, for every t ∈ [0, 1], σ(t) ∈ M is a minimum point forCf (Pi, n, 1).

14.3 Existence and uniqueness results 303
(b) It follows directly from the strict convexity of the function t 7→ds
F (σ(t), p), whenever s > 1; indeed, in (14.6) we have < instead of ≤which shows we cannot have more then one minimum point for Cf (Pi, n, s).
Example 14.2 Let F be the Finsler metric introduced in (14.1). Onecan see that (R2, F ) is a typically nonsymmetric Finsler manifold. Ac-tually, it is a (locally) Minkowski space, so a Berwald space as well; itsChern connection vanishes, see [22, p. 384]. According to (13.3) and(13.10), the geodesics are straight lines (hence (R2, F ) is geodesicallycomplete in both sense) and the flag curvature is identically 0. Thus,we can apply Theorem 14.2. For instance, if we consider the pointsP1 = (a,−b) ∈ R2 and P2 = (a, b) ∈ R2 with b 6= 0, the minimum pointsof the function Cf (Pi, 2, 1) form the segment [P1, P2], independently ofthe value of α. The same is true for Cb(Pi, 2, 1). However, consideringmore complicated constellations, the situation changes dramatically, seeFigure 14.2.
It would be interesting to study in similar cases the precise orbit ofthe (Torricelli) points Tα
f and Tαb when α varies from 0 to π/2. Several
numerical experiments show that Tαf tends to a top point of the convex
polygon (as in the Figure 14.2).
In the sequel, we want to study our problem in a special constellation:we assume the markets are situated on a common ”straight line”, i.e.,on a geodesic which is in a Riemannian manifold. Note that, in theRiemannian context, the forward and backward costs coincide, i.e.,
Cf (Pi, n, 1) = Cb(Pi, n, 1).
We denote this common value by C(Pi, n, 1). We have
Theorem 14.3 Let (M, g) be a Hadamard-type Riemannian manifold.Assume the points Pi ∈ M, i = 1, ..., n, (n ≥ 2), belong to a geodesicσ : [0, 1] → M such that Pi = σ(ti) with 0 ≤ t1 < ... < tn ≤ 1. Then
(a) the unique minimum point for C(Pi, n, 1) is P[n/2] whenever n isodd;
(b) the minimum points for C(Pi, n, 1) is the whole geodesic segmentsituated on σ between Pn/2 and Pn/2+1 whenever n is even.
Proof Since (M, g) is complete, we extend σ to (−∞,∞), keeping thesame notation. First, we prove that the minimum point(s) for C(Pi, n, 1)

304 Minimization of Cost-functions on Manifolds
Fig. 14.2. A hexagon with vertices P1, P2, ..., P6 in the Matsumoto space. Increasingthe slope’s angle α from 0 to π/2, points T α
f and T αb are wandering in the presented
directions. Orbits of points T αf and T α
b were generated by natural cubic spline curve
interpolation.
belong to the geodesic σ. We assume the contrary, i.e., let T ∈ M \Image(σ) be a minimum point of C(Pi, n, 1). Let T⊥ ∈ Image(σ) be theprojection of T on the geodesic σ, i.e.
dg(T, T⊥) = mint∈R
dg(T, σ(t)).
It is clear that the (unique) geodesic lying between T and T⊥ is perpen-dicular to σ with respect to the Riemannian metric g.
Let i0 ∈ 1, ..., n such that Pi0 6= T⊥. Applying the cosine inequality,see Theorem 13.3 (a), for the triangle with vertices Pi0 , T and T⊥ (so,T⊥ = π/2), we have
d2g(T⊥, T ) + d2
g(T⊥, Pi0) ≤ d2g(T, Pi0).

14.4 Examples on the Finslerian-Poincare disc 305
Since
dg(T⊥, T ) > 0,
we have
dg(T⊥, Pi0) < dg(T, Pi0).
Consequently,
C(Pi, n, 1)(T⊥) =n∑
i=1
dg(T⊥, Pi) <
n∑
i=1
dg(P, Pi) = min C(Pi, n, 1),
a contradiction. Now, conclusions (a) and (b) follow easily by usingsimple arithmetical reasons.
14.4 Examples on the Finslerian-Poincare disc
We emphasize that Theorem 14.3 is sharp in the following sense: neitherthe nonpositivity of the sectional curvature (see Example 14.3) nor theRiemannian structure (see Example 14.4) can be omitted.
Example 14.3 (Sphere) Let us consider the 2-dimensional unit sphereS2 ⊂ R3 endowed with its natural Riemannian metric h inherited byR3. We know that it has constant curvature 1. Let us fix P1, P2 ∈ S2
(P1 6= P2) and their antipodals P3 = −P1, P4 = −P2. There existsa unique great circle (geodesic) connecting Pi, i = 1, ..., 4. However,we observe that the function C(Pi, 4, 1) is constant on S2; its value is2π. Consequently, every point on S2 is a minimum for the functionC(Pi, 4, 1).
Example 14.4 (Finslerian-Poincare disc) Let us consider the disc
M = (x, y) ∈ R2 : x2 + y2 < 4.
Introducing the polar coordinates (r, θ) on M , i.e., x = r cos θ, y =r sin θ, we define the non-reversible Finsler metric on M by
F ((r, θ), V ) =1
1− r2
4
√p2 + r2q2 +
pr
1− r4
16
,
where
V = p∂
∂r+ q
∂
∂θ∈ T(r,θ)M.

306 Minimization of Cost-functions on Manifolds
Fig. 14.3.Step 1: The minimum of the total backward (resp. forward) cost function Cb(Pi, 2, 1)(resp. Cf (Pi, 2, 1)) is restricted to the geodesic determined by P1(1.6, 170) andP2(1.3, 250). The point which minimizes Cb(Pi, 2, 1) (resp. Cf (Pi, 2, 1)) is approxi-mated by Pb(0.8541, 212.2545) (resp. Pf = P1); in this case Cb(Pi, 2, 1)(Pb) ≈ 1.26(resp. Cf (Pi, 2, 1)(Pf ) ≈ 2.32507).Step 2: The minimum of the total backward (resp. forward) cost functionCb(Pi, 2, 1) (resp. Cf (Pi, 2, 1)) is on the whole Randers space M . The mini-mum point of total backward (resp. forward) cost function is approximated byTb(0.4472, 212.5589) (resp. Tf (1.9999, 171.5237)), which gives Cb(Pi, 2, 1)(Tb) ≈0.950825 < Cb(Pi, 2, 1)(Pb) (resp. Cf (Pi, 2, 1)(Tf ) ≈ 2.32079 < Cf (Pi, 2, 1)(Pf )).
The pair (M,F ) is the so-called Finslerian-Poincare disc. Within theclassification of Finsler manifolds, (M,F ) is a Randers space, see [22,Section 12.6], which has the following properties:
(p1) it has constant negative flag curvature −1/4;(p2) the geodesics have the following trajectories: Euclidean circular
arcs that intersect the boundary ∂M of M at Euclidean rightangles; Euclidean straight rays that emanate from the origin; andEuclidean straight rays that aim to the origin;
(p3) distF ((0, 0), ∂M) = ∞, while distF (∂M, (0, 0)) = log 2.
Although (M,F ) is forward geodesically complete (but not backwardgeodesically complete), it has constant negative flag curvature − 1
4 andit is contractible (thus, simply connected), the conclusion of Theorem14.3 may be false. Indeed, one can find points in M (belonging to thesame geodesic) such that the minimum point for the total forward (resp.backward) cost function is not situated on the geodesic, see Figure 14.3.

14.5 Comments and further perspectives 307
Remark 14.3 Note that Example 14.4 (Finslerian-Poincare disc) maygive a model of a gravitational field whose centre of gravity is located atthe origin O = (0, 0), while the boundary ∂M means the ”infinity”. Sup-pose that in this gravitational field, we have several spaceships, whichare delivering some cargo to certain bases or to another spacecraft. Also,assume that these spaceships are of the same type and they consume k
liter/second fuel (k > 0). Note that the expression F (dσ) denotes thephysical time elapsed to traverse a short portion dσ of the spaceshiporbit. Consequently, traversing a short path dσ, a spaceship consumeskF (dσ) liter of fuel. In this way, the number k
∫ 1
0F (σ(t), dσ(t))dt ex-
presses the quantity of fuel used up by a spaceship traversing an orbitσ : [0, 1] → M.
Suppose that two spaceships have to meet each other (for logisticalreasons) starting their trip from bases P1 and P2, respectively. Con-suming as low total quantity of fuel as possible, they will choose Tb asa meeting point and not Pb on the geodesic determined by P1 and P2.Thus, the point Tb could be a position for an optimal deposit-base.
Now, suppose that we have two damaged spacecraft (e.g., withoutfuel) at positions P1 and P2. Two rescue spaceships consuming as lowtotal quantity of fuel as possible, will blastoff from base Tf and not fromPf = P1 on the geodesic determined by P1 and P2. In this case, the pointTf is the position for an optimal rescue-base. If the spaceships in troubleare close to the center of the gravitational field M , then any rescue-baselocated closely also to the center O , implies the consumption of a greatamount of energy (fuel) by the rescue spaceships in order to reach theirdestinations (namely, P1 and P2). Indeed, they have to overcome thestrong gravitational force near the center O . Consequently, this is thereason why the point Tf is so far from O, as Figure 14.3 shows. Notethat further numerical experiments support this observation. However,there are certain special cases when the position of the optimal rescue-base is either P1 or P2: from these two points, the farthest one from thegravitational center O will be the position of the rescue-base. In suchcase, the orbit of the (single) rescue spaceship is exactly the geodesicdetermined by points P1 and P2.
14.5 Comments and further perspectives
A. Comments. The results of this chapter are based on the paper ofKristaly-Kozma [170] and Kristaly-Morosanu-Roth[172]. In this chap-ter we studied variational problems arising from Economical contexts

308 Minimization of Cost-functions on Manifolds
via Riemann-Finsler geometry. Real life phenomena may be well mod-elized involving Finsler metrics, which represent external force as cur-rent or gravitation. A special class of Finsler manifolds, called Berwaldspace, played a central role in our investigation. Indeed, a recent resultof Kristaly-Kozma [170] concerning metric relations on non-positivelycurved Berwald spaces has been exploited which includes several reallife applications (as the slope metric of a hillside, described by Mat-sumoto [204]). Beside of these applications, we also presented a com-pletely new material on non-positively curved Berwald spaces as well asa conjecture regarding the rigidity of Finsler manifolds under the Buse-mann curvature condition which could be of interest for the communityof Geometers.
B. Further perspectives. We propose an optimization problems whicharises in a real life situation.
Problem 14.1 There are given n ships moving on different paths (weknow all the details on their speed, direction, etc.). Determine the posi-tion of the optimum point(s) of the aircraft-carrier (mother ship) fromwhere other n ships can reach the first n ships within a given time in-terval using the lowest amount of (total) combustible.
We give some hints concerning Problem 14.1. We consider it in aparticular case as follows. Two pleasure boats are moving on givenpaths within an estuary ending in a waterfall (see Figure 14.4), anda mother ship MS is positioned in the same area for safety reasonstransporting two lifeboats. The problem is to determine the optimalposition of the mother ship MS at every moment such that the twolifeboats reach the two pleasure boats within a T period consumingthe minimal total combustible (for a lifeboat it is allowed to wait thepleasure boat but not conversely). On Figure 14.4, the points x1(0)and x2(0) correspond to the alerting moment (when the lifeboats starttheir trips) while x1(T ) and x2(T ) are the last possible points where thelifeboats and the corresponding pleasure boats may meet each other. Inthis case, the external force is the current flow towards the waterfall;the law describing this force – up to some constants – can be given as asubmanifold of the Finslerian-Poincare disc, see Example 14.4.
We now formulate the first problem within a general mathematicalframework. We consider the quasi-metric space (M,dF ) associated witha Finsler manifold (M, F ) which is not necessarily symmetric, the paths

14.5 Comments and further perspectives 309
Fig. 14.4. The force of the current flow towards the waterfall may be described bymeans of the Finslerian-Poincare disc model. The points x1(0) and x2(0) correspondto the alerting moment when the lifeboats from the mother-ship MS start theirtrips, while x1(T ) and x2(T ) are the last possible points where the lifeboats and thecorresponding pleasure boats may meet each other.
xi : [0, T ] → M (i = 1, ..., n) and some numbers vi > 0 (i = 1, ..., n)representing the speeds of the last n ships moving towards the paths xi
in order to meet the ith ship from the first group. Let us consider thefunction
fi(P ) = mint∈[0,T ]
dF (P, xi(t)) : dF (P, xi(t)) ≤ vit
and the convex functions ψi : R → R (i = 1, ..., n). The variationalproblem we are dealing with is
minf(P ) : P ∈ M (Poptim)
where
f(P ) =n∑
i=1
ψi(fi(P )).
We assume that
S =n⋂
i=1
P ∈ M : dF (P, xi(T )) ≤ viT 6= ∅,
which is a sufficient condition for the existence of a solution to the vari-ational problem (Poptim).

15
Best Approximation Problems on Manifolds
If that enabled us to predictthe succeeding situation withthe same approximation, thatis all we require, and weshould say that thephenomenon had beenpredicted, that it is governedby the laws.
Henri Poincare (1854–1912)
15.1 Introduction
One of the most famous questions of functional and numerical analy-sis is the best approximation problem: find the nearest point (calledalso projection) from a given point to a nonempty set, both situatedin an ambient space endowed with a certain metric structure by meansof which one can measure metric distances. In the classical theory ofbest approximations the ambient space has a vector space structure,the distance function is symmetric which comes from a norm or, spe-cially, from an inner product. However, non-symmetry is abundant inimportant real life situations; indeed, it is enough to consider the swim-ming (with/against a current) in a river, or the walking (up/down) ona mountain slope. These kinds of non-symmetric phenomena lead us tospaces with possible no vector space structure while the distance func-tion is not necessarily symmetric, see also Chapter 14. Thus, the mostappropriate framework is to consider not necessarily reversible Finslermanifolds. This nonlinear context throws completely new light upon theproblem of best approximations where well-tried methods usually fail.
310

15.2 Existence of projections 311
The purpose of this chapter is to initiate a systematic study of bestapproximation problems on Finsler manifolds by exploiting notions fromFinsler geometry as geodesics, forward/backward geodesically complete-ness, flag curvature, fundamental inequality of Finsler geometry, andfirst variation of arc length. Beyond of this new approach, we premise asharp contrast between the classical results of best approximation theoryand those obtained in the present paper.
Throughout this chapter, (M, F ) is a connected finite-dimensionalFinsler manifold, F is positively (but perhaps not absolutely) homo-geneous of degree one. Let dF : M ×M → [0,∞) be the quasi-metricassociated with F , see (13.8). Let q ∈ M be a point and S ⊂ M anonempty set. Since dF is not necessarily symmetric, let
distF (q, S) = infdF (q, s) : s ∈ S and distF (S, q) = infdF (s, q) : s ∈ S
the forward and backward distances between the point q and the set S,respectively. The forward (resp. backward) best approximation problemcan be formulated as follows: find sf ∈ S (resp. sb ∈ S) such that
dF (q, sf ) = distF (q, S) (resp. dF (sb, q) = distF (S, q)).
We define the set of forward (resp. backward) projections of q to S by
P+S (q) = sf ∈ S : dF (q, sf ) = distF (q, S)
(resp. P−S (q) = sb ∈ S : dF (sb, q) = distF (S, q)).
If P+S (q) and P−S (q) coincide (for instance, when the Finsler metric F
is absolutely homogeneous), we simple write PS(q) instead of the abovesets. If any of the above sets is a singleton, we do not make any differencebetween the set and its unique point.
In the following sections we are dealing in detail with the existence,characterization and non-expansiveness of projections, geodesic convex-ity and Chebyshevity of closed sets as well as with nearest points betweentwo sets.
15.2 Existence of projections
Let (M, F ) be a Finsler manifold. A set S ⊂ M is forward (resp. back-ward) proximinal if P+
S (q) 6= ∅ (resp. P−S (q) 6= ∅) for every q ∈ M.

312 Best Approximation Problems on Manifolds
Theorem 15.1 Let (M,F ) be a forward (resp. backward) geodesicallycomplete Finsler manifold, S ⊂ M a nonempty closed set. Then, S is aforward (resp. backward) proximinal set.
Proof We consider the statement only for the ”forward” case, the”backward” case works similarly. Let us fix q ∈ M arbitrarily and letsnn∈N ⊂ S be a forward minimizing sequence, i.e., limn→∞ dF (q, sn) =distF (q, S) =: d0. In order to conclude the proof, it is enough to showthat the sequence snn∈N contains a convergent subsequence. Indeed,let sknn ⊂ S be a convergent subsequence of snn. Since S is closed,then limn→∞ skn = sf ∈ S. Moreover, since dF (q, ·) is continuous, wehave dF (q, sf ) = limn→∞ dF (q, skn) = distF (q, S), which proves thatsf ∈ P+
S (q), i.e., S is a forward proximinal set.Let A = sn : n ∈ N and assume that A has no any convergent
subsequence. Then, for every a ∈ A, there exists ra > 0 such that
B+a (ra) ∩A ⊆ a. (15.1)
On the other hand, for n large enough, we have dF (q, sn) < d0 +1; thus,we may assume that A ⊂ B+
q (d0+1). Since the set A is forward boundedand closed, due to Hopf-Rinow’s theorem, it is also compact. SinceA ⊆ ∪a∈AB+
a (ra) and B+a (ra) are open balls in the manifold topology,
there exist a1, ..., al ∈ A such that A ⊆ ∪li=1B+
ai(rai). In particular, for
every n ∈ N, there exists i0 ∈ 1, ..., l such that sn ∈ B+ai0
(rai0). Due
to (15.1),
sn ∈ B+ai0
(rai0) ∩A ⊆ ai0,
i.e., sn = ai0 . Consequently, the set A contains finitely many elements,which contradicts our assumption.
The geodesically completeness cannot be dropped in Theorem 15.1.We describe here a concrete example on the Finslerian-Poincare disc, seeExample 14.4. The idea to construct a closed, not backward proximinalset in (M,F ) comes from the property (p3) and from the fact that (M, F )is not geodesically backward complete, see Bao-Chern-Shen [22, p. 342].We consider the point q = (1, 0) ∈ M and the set S = (t,−√2) :t ∈ [1,
√2) ⊂ M, see Figure 1. Clearly, S is closed in the topology of
(M, F ). However, a numerical calculation based on property (p2) and onMaple codes shows that the function t 7→ dF ((t,−√2), q), t ∈ [1,
√2), is
strictly decreasing, thus the value distF (S, q) = limt→√2 dF ((t,−√2), q) ≈0.8808 is not achieved by any point of S, i.e., P−S (q) = ∅.

15.3 Geometric properties of projections 313
Fig. 15.1. S = (t,−√2) : t ∈ [1,√
2) is a closed, but not backward proximi-nal set on the Finslerian-Poincare disc.
15.3 Geometric properties of projections
Let (X, 〈·, ·〉) be a real prehilbert space, S ⊂ X be a nonempty convexset, x ∈ X, y ∈ S. Due to Moskovitz-Dines [220] one has:
y ∈ PS(x) ⇔ 〈x− y, z − y〉 ≤ 0 for all z ∈ S. (15.2)
The geometrical meaning of this characterization is that the vectors x−y
and z − y (for every z ∈ S) form an obtuse-angle with respect to theinner product 〈·, ·〉.
For a Finsler manifold (M, F ), the function F is not necessarily in-duced by an inner product, thus angle-measuring looses its originalmeaning. The ’inner product’ on a Finsler manifold (M,F ) is the Rie-mannian metric on the pulled-back bundle π∗TM depending not onlyon the points of M but also on the directions in TM , defined by g(p,y)
from (13.1), y ∈ TpM .Let S ⊂ M be a nonempty set and q ∈ M . We consider the following
statements:
(MD+1 ) : s ∈ P+
S (q);(MD+
2 ) : If γ : [0, 1] → M is the unique minimal geodesic from γ(0) = q to

314 Best Approximation Problems on Manifolds
γ(1) = s ∈ S, then every geodesic σ : [0, δ] → S (δ ≥ 0) emanatingfrom the point s fulfills g(s,γ(1))(γ(1), σ(0)) ≥ 0.
Theorem 15.2 Let (M, F ) be a forward geodesically complete Finslermanifold, S ⊂ M be a nonempty closed set. Then, (MD+
1 ) ⇒ (MD+2 ).
Proof One may assume that δ > 0; otherwise, the statement is triv-ial since the curve σ shrinks to a point. Standard ODE theory showsthat the geodesic segment σ : [0, δ] → M has a C∞ extension σ :(−ε, δ] → M , where ε > 0, see Bao-Chern-Shen [22, Exercise 5.4.2].Since γ is the unique minimal geodesic lying the points q and s, thereexists v0 ∈ TqM such that γ(t) = expq(tv0) and expq∗ is nonsingular atthe point v0. On account of Bao-Chern-Shen [22, p. 205], one may fix0 < ε0 < minε, δ and a C∞ vector field V : [−ε0, ε0] → TqM such thatV (0) = v0, expq(V (u)) = σ(u) and expq∗ is not singular at V (u) for ev-ery u ∈ [−ε0, ε0]. Let us introduce the map Σ : [0, 1]× [−ε0, ε0] → M byΣ(t, u) = expq(tV (u)). Note that Σ is well-defined and Σ is a variationof the geodesic γ with Σ(·, 0) = γ. By definition, we have
L′F (Σ(·, 0)) =d
duLF (Σ(·, u))|u=0 = lim
u→0+
LF (Σ(·, u))− LF (Σ(·, 0))u
≥ limu→0+
dF (q, σ(u))− LF (γ)u
= limu→0+
dF (q, σ(u))− dF (q, s)u
.
Since s ∈ P+S (q) and σ(u) ∈ S for small values of u ≥ 0, the latter limit
is non-negative; thus, L′F (Σ(·, 0)) ≥ 0. On the other hand, combiningthis relation with the first variation formula, see (13.7), we obtain
0 ≤ L′F (Σ(·, 0)) =g(s,γ(1))(γ(1), σ(0))
F (s, γ(1)).
We now consider the statements for the ”backward” case:
(MD−1 ) : s ∈ P−S (q);
(MD−2 ) : If γ : [0, 1] → M is the unique minimal geodesic from γ(0) = s ∈ S
to γ(1) = q, then every geodesic σ : [0, δ] → S (δ ≥ 0) emanatingfrom the point s fulfills g(s,γ(0))(γ(0), σ(0)) ≤ 0.
The proof of the following result works similarly to that of Theorem15.2.

15.3 Geometric properties of projections 315
Theorem 15.3 Let (M,F ) be a backward geodesically complete Finslermanifold, S ⊂ M be a nonempty, closed set. Then, (MD−
1 ) ⇒ (MD−2 ).
Remark 15.1 Let (M, g) be a Riemannian manifold. In this specialcase, since the fundamental tensor g is independent on the directions,the statements (MD+
1 ) and (MD+2 ) (as well as (MD−
1 ) and (MD−2 ))
reduce to:
(MD1) : s ∈ PS(q);(MD2) : If γ : [0, 1] → M is the unique minimal geodesic from γ(0) =
s ∈ S to γ(1) = q, then every geodesic σ : [0, δ] → S (δ ≥ 0)emanating from the point s fulfills g(γ(0), σ(0)) ≤ 0.
Remark 15.2 The implications in Theorems 15.2 and 15.3 cannot bereversed in general, not even for Riemannian manifolds. Indeed, weconsider the m-dimensional unit sphere (Sm, g0) (m ≥ 2), and we fix theset S as the equator of Sm. Let also q ∈ Sm \ (S ∪N,−N) where N isthe North pole. One can see that hypothesis (MD2) holds exactly for twopoints s1 ∈ S and s2 = −s1 ∈ S; these points are the intersection pointsof the equator S and the plane throughout the points q, N and −N . Letus fix an order of the points on the great circle: N, q, s1,−N, s2. Then,we have distg0(q, S) = dg0(q, s1) < π/2 < dg0(q, s2), thus s1 ∈ PS(q) buts2 /∈ PS(q).
In spite of Remark 15.2 we have two Moskovitz-Dines type characteri-zations. The first is due to Walter [290] for Hadamard-type Riemannianmanifolds.
Theorem 15.4 Let (M, g) be a Hadamard-type Riemannian manifoldand let S ⊂ M be a nonempty, closed, geodesic convex set. Then(MD1) ⇔ (MD2).
For not necessarily reversible Minkowski spaces, we may prove thefollowing.
Theorem 15.5 Let (M,F ) = (Rm, F ) be a Minkowski space and S ⊂ M
be a nonempty, closed, geodesic convex set. Then(i) (MD+
1 ) ⇔ (MD+2 );
(ii) (MD−1 ) ⇔ (MD−
2 ).
Proof On account of Theorems 15.2 and 15.3 we have (MD+1 ) ⇒ (MD+
2 )

316 Best Approximation Problems on Manifolds
and (MD−1 ) ⇒ (MD−
2 ), respectively. We now prove that (MD+2 ) ⇒
(MD+1 ); the implication (MD−
2 ) ⇒ (MD−1 ) works in a similar way.
We may assume that s 6= q. The unique minimal geodesic γ : [0, 1] →M from γ(0) = q to γ(1) = s ∈ S is γ(t) = q + t(s− q). Fix z ∈ S, anddefine the geodesic segment σ : [0, 1] → M by σ(t) = s + t(z − s). SinceS is geodesic convex, then σ([0, 1]) ⊆ S. Consequently, the inequalityfrom (MD+
2 ) reduces to
gs−q(s− q, z − s) ≥ 0. (15.3)
Relations (15.3) and (13.11) yield
d2F (q, s) = F 2(s− q)
= gs−q(s− q, s− q)
≤ gs−q(s− q, z − q)
≤ F (s− q) · F (z − q)
= dF (q, s) · dF (q, z),
i.e., dF (q, s) ≤ dF (q, z). Since z ∈ S is arbitrarily fixed, we have s ∈P+
S (q).
15.4 Geodesic convexity and Chebyshev sets
If (X, 〈·, ·〉) is a finite-dimensional Hilbert space and S ⊂ X is a nonemptyclosed set, the equivalence of the following statements is well-known (seeBorwein [43] and Phelps [239]):• S is convex;• S is Chebyshev, i.e., cardPS(x) = 1 for every x ∈ X;• PS is non-expansive, i.e., for every x1, x2 ∈ X,
‖PS(x1)− PS(x2)‖ ≤ ‖x1 − x2‖.On manifolds, as might be expected, uniqueness of the projection is in-fluenced not only by the geodesical convexity of the set but also by thecurvature of the space. The latter is well emphasized by consideringthe standard m-dimensional unit sphere Sm (m ≥ 2) with its naturalRiemannian metric g0, having constant sectional curvature 1. The pro-jection of the North pole N ∈ Sm to a geodesic ball centered at theSouth pole and radius r < 1/2 is the whole boundary of this geodesicball. As far as we know, there is only one class guaranteeing the unique-ness of projections on non-positively curved spaces from any point toany; namely, the geodesic convex sets on global Busemann NPC spaces,

15.4 Geodesic convexity and Chebyshev sets 317
see Jost [150, Section 3.3]. Note that all Hadamard-type Riemannianmanifolds belong to this class, see also Udriste [286].
However, uniqueness of projections to generic geodesic convex sets arenot known either for reversible or for non-reversible Finsler manifoldswith non-positive curvature. In the sequel, we delimit a class of not nec-essarily reversible Finsler manifolds (so, in particular, non-Riemannianmanifolds) for which the forward/backward projections are singletons toany geodesic convex sets.
Let (M,F ) be a Finsler manifold. A set S ⊂ M is a forward (resp.backward) Chebyshev set if cardP+
S (q) = 1 (resp. cardP−S (q) = 1) foreach q ∈ M .
Theorem 15.6 Let (M,F ) be a forward (resp. backward) geodesicallycomplete, simply connected Berwald space with non-positive flag curva-ture, and S ⊂ M a nonempty, closed, geodesic convex set. Then, S is aforward (resp. backward) Chebyshev set.
Proof By Theorem 15.1, we know that cardP+S (q) ≥ 1 (resp. cardP−S (q) ≥
1) for every q ∈ M . On the other hand, Proposition 13.5 guaran-tees that t 7→ dF (γ1(t), γ2(t)) is convex for any two minimal geodesicsγ1, γ2 : [0, 1] → M (with not necessarily a common starting point).In particular, for every q ∈ M and any non-constant geodesic γ :[0, 1] → M , the function t 7→ d2
F (q, γ(t)) is strictly convex. Now, as-sume that cardP+
S (q) > 1, i.e., there exists s1, s2 ∈ P+S (q), s1 6= s2.
Let γ : [0, 1] → M be the minimal geodesic which joins these points.Consequently, Imγ ⊂ S and for every 0 < t < 1, we have
d2F (q, γ(t)) < td2
F (q, γ(1)) + (1− t)d2F (q, γ(0)) = dist2F (q, S),
a contradiction.
Remark 15.3 Both Hadamard-type Riemannian manifolds and Min-kowski spaces fulfill the hypotheses of Theorem 15.6. Now, we present atypical class of Berwald spaces where Theorem 15.6 applies. Let (N, h)be an arbitrarily closed hyperbolic Riemannian manifold of dimensionat least 2, and ε > 0. Let us define the Finsler metric Fε : T (R×N) →[0,∞) by
Fε(t, p; τ, w) =
√hp(w,w) + τ2 + ε
√h2
p(w, w) + τ4,
where (t, p) ∈ R×N and (τ, w) ∈ T(t,p)(R×N). Shen [273] pointed out

318 Best Approximation Problems on Manifolds
that the pair (R×N, Fε) is a reversible Berwald space with non-positiveflag curvature which is neither a Riemannian manifold nor a Minkowskispace.
Remark 15.4 There are Finsler manifolds with non-positive flag cur-vature which are not curved in the sense of Busemann and the functiont 7→ dF (γ1(t), γ2(t)) is not convex; simple examples of these types canbe given theoretically on Hilbert geometries (see Socie-Methou [277]), ornumerically on certain Randers spaces (see Shen [271], [272]) by usingevolutive programming in the spirit of Kristaly-Morosanu-Roth [172].Thus, no convexity property of the function t 7→ dF (γ1(t), γ2(t)) can beguaranteed in general which raises doubts on the validity of Theorem15.6 for arbitrary Finsler manifolds with non-positive flag curvature.
Remark 15.5 The Chebyshevity of a closed set does not imply alwaysits geodesic convexity in arbitrarily Hadamard-type Riemannian mani-folds. Indeed, consider the Poincare upper half-plane model H2 (withsectional curvature −1) and the closed set S = H2 \ B(0,1)(2), whereB(0,1)(2) is the standard euclidean 2-dimensional open ball with center(0, 1) ∈ R2 and radius 2. S is a Chebyshev set since every horocyclewhich is below of the boundary ∂S and tangent to the same set ∂S, issituated in the interior of B(0,1)(2). However, it is clear that S is notgeodesic convex. For further examples and comments, see Grognet [130,Section 2]. These examples show the converse of Theorem 15.6 does nothold in general. Moreover, the following rigidity result does hold.
Theorem 15.7 (Busemann [54, p. 152]) Let (M,F ) be a simply-connected, complete, reversible Finsler manifold with non-positive flagcurvature. If any Chebyshev set in M is geodesic convex, then (M, F )is a Minkowski space.
The following characterization of geodesic convexity is due to Grognet[130] (see also Udriste [286] for an alternative proof via the second vari-ation formula of the arc lenght):
Theorem 15.8 Let (M, g) be a Hadamard-type Riemannian manifoldand S ⊂ M be a nonempty closed set. The following two statements areequivalent:
(i) S is geodesic convex;

15.4 Geodesic convexity and Chebyshev sets 319
(ii) PS is non-expansive, i.e., dg(PS(q1), PS(q2)) ≤ dg(q1, q2) for anyqi ∈ M , i = 1, 2.
Proof (i)⇒(ii) This part is contained in Udriste [286]; for complete-ness we give its outline. First, on account of Theorem 15.6, S is aChebyshev set. Fix q1, q2 ∈ M and let γi : [−1, 1] → M be the uniquegeodesic with constant speed from γi(−1) = qi to γi(1) = si = PS(qi),i = 1, 2. Define the variation Σ : [0, 1] × [−1, 1] → M by Σ(t, u) =expγ1(u)(t exp−1
γ1(u)(γ2(u))). Note that
L2g(Σ(·, u)) =
(∫ 1
0
√g(
∂Σ∂t
(t, u),∂Σ∂t
(t, u))dt
)2
=∫ 1
0
g(∂Σ∂t
(t, u),∂Σ∂t
(t, u))dt .
Throughout the first variational formula, we obtain that
(L2g)′(Σ(·, 1)) = 2
[g(γ′2(1),
∂Σ∂t
(1, 1))− g(γ′1(1),∂Σ∂t
(0, 1))]
.
Since S is geodesic convex, then the geodesic Σ(·, 1) belongs to S. Ap-plying Theorem 15.4, we obtain that
g(−γ′1(1),∂Σ∂t
(0, 1)) ≤ 0 and g(−γ′2(1),−∂Σ∂t
(1, 1)) ≤ 0 .
Consequently, (L2g)′(Σ(·, 1)) ≤ 0. Now, using the second variational for-
mula, and taking into account that γ1, γ2 are geodesics, we deduce that
(L2g)′′(Σ(·, u)) = 2
∫ 1
0
[g
(D
∂t
∂Σ∂t
,D
∂t
∂Σ∂t
)−R
(∂Σ∂t
,∂Σ∂u
,∂Σ∂t
,∂Σ∂u
)]dt,
where R is the Riemannian curvature tensor. Since the sectional cur-vature is non-positive, we obtain (L2
g)′′(Σ(·, u)) ≥ 0. Now, the Taylorexpansion yields Lg(Σ(·, 1)) ≤ Lg(Σ(·,−1)), i.e., dg(s1, s2) ≤ dg(q1, q2).
(ii)⇒(i) Assume that S is not geodesic convex, i.e., there exists twodistinct points s1, s2 ∈ S such that the unique geodesic with constantspeed γ : [0, 1] → M , with γ(0) = s1 and γ(1) = s2 has the propertythat γ(t) /∈ S for every t ∈ (0, 1). Since S is proximinal, cf. Theorem15.1, we fix an element s ∈ PS(γ(1/2)).
We claim that either dg(s1, s) or dg(s, s2) is strictly greater thandg(s1, s2)/2. If s = s1 or s = s2, the claim is true. Now, if s1 6= s 6=s2, we assume that maxdg(s1, s), dg(s, s2) ≤ dg(s1, s2)/2. Therefore,dg(s1, s2) ≤ dg(s1, s) + dg(s, s2) ≤ dg(s1, s2), which implies that s ∈ S

320 Best Approximation Problems on Manifolds
belongs to the geodesic γ, contradicting our initial assumption. Thus,the claim is true. Suppose that dg(s1, s) > dg(s1, s2)/2; the other caseworks similarly. Since PS(s1) = s1 and dg(s1, s2)/2 = dg(s1, γ(1/2)),relation dg(s1, s) > dg(s1, γ(1/2)) contradicts (ii).
Remark 15.6 In spite of Theorem 15.8 there is no way to give a simi-lar characterization for generic Finsler manifolds with non-positive flagcurvature. In the sequel, we give such a simple counterexample on Mat-sumoto mountain slope (R2, Fα), see (14.1). More precisely, let v = 10and α = 60o in (R2, Fα), and
S = (y1, y2) ∈ R2 : y1 + y2 = 1.It is clear that S is closed and geodesic convex. Let q1 = (0, 0) andq2 = (0, 1). Since q2 ∈ S, then P+
S (q2) = q2. Due to Theorem 15.6,cardP+
S (q1)=1, and from Theorem 15.5, sf ∈ P+S (q1) if and only if
gsf(sf , e) = 0 where e = (1,−1) is the direction vector of the straight
line S. Solving the equation gsf(sf , e) = 0, we obtain the unique solution
sf = (0.58988935, 0.41011065) ∈ S. Moreover,
dFα(P+S (q1), P+
S (q2)) = dFα(sf , q2) = Fα(q2 − sf )
= 0.58988935 · Fα(−1, 1) = 0.11923844
> 0.1 = Fα(q2 − q1)
= dFα(q1, q2).
Consequently, P+S is not a non-expansive map in general.
15.5 Optimal connection of two submanifolds
Let us assume that two disjoint closed sets M1 and M2 are fixed in a(not necessarily reversible) Finsler manifold (M,F ). Roughly speaking,we are interested in the number of those Finslerian geodesics which con-nect M1 and M2 in an optimal way, i.e., satisfying certain boundaryconditions. In order to handle this problem, following Mercuri [209],Caponio, Javaloyes and Masiello [56], we first describe the structure ofa special Riemann-Hilbert manifold.
Let (M, F ) be a forward or backward complete Finsler manifold andlet us endow in the same time M with any complete Riemannian met-ric h. Let N be a smooth submanifold of M × M . We consider thecollection ΛN (M) of curves c : [0, 1] → M with (c(0), c(1)) ∈ N andhaving H1 regularity, that is, c is absolutely continuous and the integral

15.5 Optimal connection of two submanifolds 321∫ 1
0
h(c, c)ds is finite. It is well known that ΛN (M) is a Hilbert manifold
modeled on any of the equivalent Hilbert spaces of H1 sections, withendpoints in TN , of the pulled back bundle c∗TM , c being any regularcurve in ΛN (M). For every H1 sections X and Y of c∗TM the scalarproduct is given by
〈X,Y 〉1 =∫ 1
0
h(X, Y )ds +∫ 1
0
h(∇hc X,∇h
c Y )ds (15.4)
where ∇hc is the usual covariant derivative along c associated to the
Levi-Civita connection of the Riemannian metric h.Let J : ΛN (M) → R be the energy functional defined by
J(c) =12
∫ 1
0
F 2(c, c)ds. (15.5)
For further use, we denote the function F 2 by G. Note that the func-tional J is of class C2− on the space ΛN (M), i.e., it is of class C1 withlocally Lipschitz differential.
Proposition 15.1 A curve γ ∈ ΛN (M) is a constant (non zero) speedgeodesic for the Finsler manifold (M,F ) satisfying the boundary condi-tion
g(γ(0),γ(0))(V, γ(0)) = g(γ(1),γ(1))(W, γ(1)), ∀(V,W ) ∈ T(γ(0),γ(1))N,
(15.6)if and only if it is a (non constant) critical point of J .
Proof Assume that γ ∈ ΛN (M) is a critical point of J . One can provethat γ is a smooth regular curve which argument is based on local coor-dinates. Now let Z ∈ TγΛN (M) be a smooth vector field along γ and letΣ : [0, 1]× [−ε, ε] → M be a smooth regular variation of γ with variationvector field U = ∂Σ
∂u having endpoints in TN and such that U(t, 0) = Z(t)for all t ∈ [0, 1]. Let also T = ∂Σ
∂t . Since G(x, y) = g(x,y)(y, y) for any(x, y) ∈ TM \ 0, from (13.5) we get
d
duJ(Σ) =
12
∫ 1
0
∂
∂ug(Σ,T )(T, T )dt =
∫ 1
0
g(Σ,T )(T, DUT )dt. (15.7)
Since Σ is smooth, we have that DUT = DT U both considered with thereference vector T ; therefore, using this equality in (15.7) and evaluating

322 Best Approximation Problems on Manifolds
at u = 0 we obtain
dJ(γ)[Z] =∫ 1
0
g(γ,γ)(γ, DγZ)dt, (15.8)
where DγZ has reference vector γ. Now, applying relation (13.4), wehave
d
dtg(γ,γ)(γ, Z) = g(γ,γ)(Dγ γ, Z) + g(γ,γ)(γ, DγZ),
which, when applied to (15.8), gives us
0 = dJ(γ)[Z] = −∫ 1
0
g(γ,γ)(Dγ γ, Z)dt+g(γ(1),γ(1))(γ(1), Z(1))−g(γ(0),γ(0))(γ(0), Z(0)).
(15.9)Now, by choosing an endpoints vanishing vector field Z one can seethat γ should verify the equation Dγ γ = 0, i.e., γ is a constant speedgeodesic. Consequently, the remaining part of the above relation givesprecisely the boundary conditions (15.6).
For the converse, we observe that if γ is a constant non-zero speedgeodesic satisfying the boundary conditions (15.6) then (15.9) holds andhence γ is a critical point of J .
Remark 15.7 Two particular cases is presented concerning the form ofN.
(i) Let ∆ be the diagonal in M × M and N = ∆. By using theEuler theorem for homogeneous functions, we know that ∂yG(x, y) =2g(x,y)(·, y) for any (x, y) ∈ TM . Hence, from γ(0) = γ(1) and (15.6)we clearly have
∂yG(γ(0), γ(0)) = ∂yG(γ(0), γ(1)).
Since the map y 7→ ∂yG(x, y) is an injective map, we necessarily havethat γ(0) = γ(1), i.e., the curve γ in Proposition 15.1 is a closed geodesic.See Mercuri [209].
(ii) Let M1 and M2 be two submanifolds of M and N = M1×M2. In(15.6) put W = 0. Then, for any V ∈ Tγ(0)M1 we get g(γ(0),γ(0))(V, γ(0)) =0. Analogously, taking V = 0, we have g(γ(1),γ(1))(W, γ(0)) = 0 for anyW ∈ Tγ(1)M2. When (M,F ) is a Riemannian manifold, these conditionsare actually the well-known perpendicularity conditions to M1 and M2,respectively. See Grove [133].
Based on the papers of Caponio, Javaloyes and Masiello [56], Kozma,Kristaly and Varga [160], and Mercuri [209], we sketch the proof of the

15.5 Optimal connection of two submanifolds 323
fact that J satisfies the (PS)-condition under natural assumptions. Thisresult allows us to give several multiplicity results concerning the numberof geodesics joining two different submanifolds in a Finsler manifold.
Proposition 15.2 Let (M, F ) be forward (resp. backward) completeand N be a closed submanifold on M ×M such that the first projection(resp. the second projection) of N to M is compact. Then J satisfiesthe (PS)-condition on ΛN (M).
Proof (Sketch) We sketch the proof in the forward complete case, thebackward being similar.
Step 1. Differentiable structure on ΛN (M). The manifold ΛN (M) isa closed submanifold of the complete Hilbert manifold Λ(M); the lastone being the set of all the H1 curves in M parameterized on [0, 1] withscalar product from (15.4). The differentiable manifold structure onΛ(M) is given by the charts (Oω, exp−1
ω )ω∈C∞(M), where exp−1ω is the
inverse of the map expω(ξ) = expω(t) ξ(t), for all ξ ∈ H1(Oω), being Oω
a neighborhood of the zero section in ω∗TM .Step 2. Uniform convergence of a (PS)-sequence. We consider the
sequence cnn∈N contained in ΛN (M) which verifies the assumptionsfrom the (PS)-condition. In particular, J(cn)n is bounded. We shallprove that the sequence cnn converges uniformly. To do this, we fix apoint p ∈ p1(N), where p1 is the first projection on M ×M . Then
dF (p, cn(s)) ≤ dF (p, cn(0)) + dF (cn(0), cn(s))
≤ dF (p, cn(0)) +∫ 1
0
F (cn, cn)ds,
for all s ∈ [0, 1], n ∈ N. Since p1(N) is compact, there exists a constantK such that dF (p, cn(0)) ≤ K. By the Holder inequality, for everys ∈ [0, 1] we have
dF (p, cn(s)) ≤ K +(∫ 1
0
G(cn, cn)ds
) 12
= K +√
J(cn) ≤ K1.
Consequently, the set S = cn(s) : s ∈ [0, 1], n ∈ N is a forwardbounded set; thus, Hopf-Rinow theorem, see Theorem 13.1, shows thatthere exists a compact subset C of M which contains S. Hence thereexist k1, k2 > 0 such that
k1|v|2 ≤ G(x, v) ≤ k2|v|2, ∀x ∈ C, v ∈ TxM.
Here, we denoted by | · | the norm associated to the metric h. Moreover,

324 Best Approximation Problems on Manifolds
let dh be the distance associated to the Riemannian metric h, then usingthe last and Holder’s inequalities, we get
dh(cn(s1), cn(s2)) ≤∫ s2
s1
|cn|ds ≤ √s2 − s1
(∫ 1
0
|cn|2ds
) 12
≤ 1k1
√s2 − s1
(∫ 1
0
G(cn, cn)ds
) 12
≤ K2
√s2 − s1,
with s1 < s2 in [0, 1] and K2 > 0, so that cn(t) is relatively compactfor every t ∈ [0, 1] and uniformly Holder. Thus we can use the symmetricdistance dh and the Ascoli-Arzela theorem to obtain a subsequence, thatwill be denoted again by cn, converging uniformly to a curve c of classC0 parameterized in [0, 1] and having endpoints in N .
Step 3. Reduction of the strong convergence of cnn to an appropri-ate convergence in H1-topology. For any η > 0 small enough the setC = expc(s) v : s ∈ [0, 1]; v ∈ B(c(s), η) is compact in M. Let inj(p)be the injectivity radius of p in (M, h) and ρ = infinj(p) : p ∈ C.Since the injectivity radius is continuous, we have that ρ > 0; therefore,there exists a curve ω of class C∞ such that ‖c − ω‖∞ < minη, ρ/2.Let [0, 1] 3 t → E(t) = (E1(t), . . . , Em(t)) be a parallel orthonormalframe along ω with m = dim M , and let Pt : Rm → Tω(t)M de-fined as Pt(v1, . . . , vm) = v1E(t) + · · · + vmEm(t). Consider the Eu-clidean open ball of radius ρ, denoted in the sequel by U , and the mapϕ(t, v) = expω(t) Pt(v). Since ρ ≤ inj(ω(t)), the map ϕt : U → M , de-fined as ϕt(v) = ϕ(t, v), is locally invertible and injective with invertibledifferential dϕt(v), for every t ∈ [0, 1] and v ∈ U . By taking a smalleropen set in U that contains the closed ball of radius ρ/2 and containedin the closed ball of radius 2ρ/3, we can assume that all the continu-ous functions involved in the rest of the proof are uniformly bounded in[0, 1] × U or in
⋃t∈[0,1]t × ϕ(t × U), as for example the norms of
dϕ(t, v) and dϕ(t, x), where ϕ(t, x) = ϕ−1t (x). Let Oω be a neighbor-
hood of ω in H1([0, 1], M) such that the map ϕ−1∗ : Oω → H1([0, 1], U),
defined as ϕ−1∗ (x)(t) = ϕ−1
t (x(t)) is the map of coordinate system cen-tered at ω. Observe that the inverse of ϕ−1
∗ is the map ϕ∗, defined byϕ∗(ξ)(t) = ϕ(t, ξ(t)). Clearly if n is big enough, cn ∈ ϕ∗(H1([0, 1], U)),so that we call ξn = ϕ−1
∗ (cn). Consequently, taking into account theabove reduction argument inspired by [1, Appendix A.1], the strongconvergence of cnn is equivalent with the strong convergence of ξnn
in H1([0, 1], U).Step 4. Splitting argument. Taking the vector space of dimension 2m

15.5 Optimal connection of two submanifolds 325
defined by V = ζ ∈ C∞([0, 1],Rm) : ζ ′′− ζ = 0, we have the followingorthogonal splitting
H1([0, 1],Rm) = H10 ([0, 1],Rm)⊕ V.
Therefore, if n ∈ N is big enough there exist ξ0n ∈ H1
0 ([0, 1], U) andζn ∈ V such that ξn = ξ0
n + ζn. Note that cn is a sequence whichverifies the assumptions of the (PS)-condition. Moreover, the norm ofdϕ∗ is bounded in H1([0, 1], U), ζnn is a converging sequence in the C1
norm (which follows from the C0 convergence of ξnn and the smoothdependence of the solutions of the differential equation defining V fromboundary data) and ξnn is a bounded sequence in H1([0, 1], U) (ξ0
n
is a bounded sequence in H10 ([0, 1], U)). Due to the above facts and
considering J defined on the manifold Λ(M), we have
d(J ϕ∗)(ξn)[ξn − ξk]
= d(J ϕ∗)(ξn)[ξ0n − ξ0
k] + d(J ϕ∗)(ξn)[ζn − ζk]
= dJ(cn)[dϕ∗(ξn)[ξ0n − ξ0
k]] + d(J ϕ∗)(ξn)[ζn − ζk] → 0. (15.10)
Step 5. Boundedness of ξnn in H1([0, 1], U). To see this, it isenough to observe that
∫ 1
0
|ξn|2ds =∫ 1
0
|dϕ(s, cn)[(1, cn)]|2ds
≤ K3
∫ 1
0
(1 + h(cn, cn))ds ≤ K3 + K4J(cn) < K5 < +∞, (15.11)
where ϕ(s, x) = ϕ−1s (x), for every s ∈ [0, 1] and x ∈ ϕs(U), and
K3, K4,K5 are positive constants.Step 6. (Final) The sequence ξnn is fundamental in H1([0, 1], U).
Technical estimations show that∫ 1
0
|ξn − ξk|2ds → 0
as n, k →∞. This concludes the proof.
Now, we are in the position to establish an existence and some multi-plicity results concerning the number of geodesics joining two submani-folds in a Finsler manifold.

326 Best Approximation Problems on Manifolds
Theorem 15.9 Let (M, F ) be a forward or backward complete Finslermanifold and let M1 and M2 be two closed submanifolds of M such thatM1 or M2 is compact. Then in any homotopy class of curves from M1
to M2 there exists a geodesic with energy smaller than that of any othercurve in this class satisfying (15.6). Furthermore, there are at leastcatΛM1×M2(M) geodesics joining M1 and M2 with the property (15.6).
Proof Since ΛM1×M2(M) is a complete Hilbert-Riemann manifold andthe energy functional satisfies the (PS)-condition, see Proposition 15.2,it follows that the energy integral attains its infimum on any componentof ΛM1×M2(M) and its lower bound, see Theorem 1.4. The infimumpoints are critical points of J , while any critical point c for J is a geodesicwith the property (15.6), see Proposition 15.1. Therefore, the first partis proved. Now, applying Theorem 1.9, we obtain our last claim.
Theorem 15.10 Let (M, F ) be a compact, connected and simply con-nected Finsler manifold, and let M1 and M2 be two closed disjoint sub-manifolds of M with M1 contractible. Then there are infinitely manygeodesics joining M1 and M2 with the property (15.6).
Proof Due to Theorem C.3, we have that cuplongΛM1×M2(M) = ∞.
Using the inequality catΛM1×M2(M) ≥ 1 + cuplongΛM1×M2(M), fromTheorem 15.9 the statement follows.
Theorem 15.11 Let (M, F ) be a complete, non-contractible Finslermanifold, and let M1 and M2 be two closed, disjoint and contractiblesubmanifolds of M such that M1 or M2 is compact. Then there areinfinitely many geodesics joining M1 and M2 with the property (15.6).
Proof Since M1×M2 is a submanifold of M×M, the inclusion ΛM1×M2M →C0
M1×M2(M) = σ ∈ C0([0, 1],M) : σ(0) ∈ M1, σ(1) ∈ M2 is a homo-
topy equivalence, see Grove [133, Theorem 1.3]. Since M1 and M2 arecontractible subsets of M, the sets C0
M1×M2(M) and M1 ×M2 × Ω(M)
are homotopically equivalent, see Fadell-Husseini [109, Proposition 3.2].Since M is non contractible, we have catΩ(M) = ∞, see Theorem C.1.Therefore, catΛM1×M2(M) = ∞ and we apply again Theorem 15.9 toobtain the desired conclusion.

15.6 Final remarks and perspectives 327
15.6 Final remarks and perspectives
Further questions arise concerning the best approximation problems onFinsler manifolds. We formulate only a few of them:
(i) The Moskovitz-Dines type characterization of projections has beenproved for Minkowski spaces (Theorem 15.5) and for Hadamard-type Riemannian manifolds (Theorem 15.4). We feel quite certainwe face a rigidity result: if (MD+
1 ) ⇔ (MD+2 ) (or, (MD−
1 ) ⇔(MD−
2 )) holds on a Finsler manifold (M, F ) with non-positiveflag curvature, than (M, F ) is either a Riemannian manifold or aMinkowski space.
(ii) We were able to prove the uniqueness result (Theorem 15.6) onlyon Berwald spaces. Try to extend Theorem 15.6 to any (not nec-essarily reversible) Finsler manifold with non-positive flag curva-ture; see also Remark 15.4.
(iii) Determine those classes of Finsler manifolds with non-positiveflag curvature whose (forward and backward) projections are non-expansive for every nonempty, closed, geodesic convex set. We be-lieve the only class fulfilling this property is the class of Hadamard-type Riemannian manifolds. There are three supporting reasonsfor this fact: (i) non-expansiveness of the projection map holdson Hadamard-type Riemannian manifolds, see Theorem 15.8; (ii)in Remark 15.6 we gave a counterexample for non-expansivity ofthe projection map on a slightly general case than Riemannianmanifolds; (iii) the non-expansiveness of the projection map holdson a normed vector space if and only if the norm comes from aninner product, see Phelps [239].

16
A Variational Approach of the NashEquilibria
I did have strange ideas duringcertain periods of time.
John F. Nash (b. 1928)
16.1 Introduction
Nash equilibrium plays a central role in game theory; it is a concept strat-egy of a game involving n-players (n ≥ 2) in which every player knowthe equilibrium strategies of the other players, and changing his/her ownstrategy alone, a player has nothing to gain.
Let K1, . . . , Kn (n ≥ 2) be the nonempty sets of strategies of theplayers and fi : K1 × . . . × Kn → R (i ∈ 1, . . . , n) be the payofffunctions. A point p = (p1, . . . , pn) ∈ K is a Nash equilibrium point for(f ,K) if
fi(p; qi) ≥ fi(p) for all qi ∈ Ki, i ∈ 1, . . . , n.Here and in the sequel, the following notations are used: K = Πn
i=1Ki;p = (p1, . . . , pn); (f ,K) = (f1, . . . , fn; K1, . . . , Kn); (p; qi) = (p1, . . . , qi, . . . , pn).
The most well-known existence result is due to Nash (see [225], [224])which works for compact and convex subsets Ki of Hausdorff topologicalvector spaces, and the continuous payoff functions fi are (quasi)convexin the ith-variable, i ∈ 1, . . . , n. A natural question that arises at thispoint is:
How is it possible to guarantee the existence of Nash equilibrium points for afamily of payoff functions (perhaps set-valued) without any convexity, or evenmore, when their domains are not convex in the usual sense?
328

16.2 Nash equilibria and variational inequalities 329
In this chapter we focus our attention to the existence and locationof Nash equilibrium points in various context. First, in Section 16.2we give several formulations of Nash equilibria via variational inequal-ities of Stampacchia and Minty type following the paper of Cavazzuti,Pappalardo and Passacantando [62], in Section 16.3 we are dealing withNash equilibrium points for set-valued maps on vector spaces. In Section16.4, we treat a case when the domain of the strategy sets are not neces-sarily convex in the usual sense by applying elements from Riemanniangeometry.
16.2 Nash equilibria and variational inequalities
We first recall the well-known result of Nash (see [225], [224]), concerningthe existence of at least one Nash equilibrium point for a system (f ,K).
Theorem 16.1 Let K1, . . . ,Kn be nonempty compact convex subsets ofHausdorff topological vector spaces, and let fi : K → R (i ∈ 1, . . . , n)be continuous functions such that qi ∈ Ki 7→ fi(p; qi) is quasiconvex forall fixed pj ∈ Kj (j 6= i). Then there exists a Nash equilibrium point for(f ,K).
In the sequel, assume that the sets of strategies of the players, i.e.,K1, . . . ,Kn (n ≥ 2), are closed convex subsets of a common vector spaceX. Moreover, we also assume that the payoff functions fi are continuouson K and each fi is of class C1 in its ith variable on an open set Di ⊇ Ki.Let p ∈ K; we introduce the notations
∇f(p) = (∂f1
∂p1(p), ...,
∂fn
∂pn(p)) and 〈∇f(p),q〉 =
n∑
i=1
〈∂fi
∂pi(p), qi〉,
where 〈·, ·〉 inside the sum denotes the duality pair between X and X∗.A point p = (p1, . . . , pn) ∈ K is a Nash-Stampacchia point for (f ,K)
if
〈∇f(p),q− p〉 ≥ 0 for all q ∈ K.
In a similar way, a point p = (p1, . . . , pn) ∈ K is a Nash-Minty point for(f ,K) if
〈∇f(q),q− p〉 ≥ 0 for all q ∈ K.
Theorem 16.2 (a) Every Nash equilibrium point for (f ,K) is a Nash-Stampacchia point for (f ,K).

330 A Variational Approach of the Nash Equilibria
(b) Every Nash-Minty equilibrium point for (f ,K) is a Nash equilib-rium point for (f ,K).
(c) If each fi is convex in its ith variable, then the converses also holdin (a) and (b).
Proof The proof easily follows from Lemmas 13.1 and 13.2.
Theorem 16.3 Assume that ∇f is a strictly monotone operator. Then,the following assertions hold true:
(a) (f ,K) has at most one Nash-Stampacchia point.(b) (f ,K) has at most one Nash equilibrium point.
Proof (a) Assume that p1 6= p2 ∈ K are Nash-Stampacchia points for(f ,K). In particular, we clearly have that
〈∇f(p1),p2 − p1〉 ≥ 0,
〈∇f(p2),p1 − p2〉 ≥ 0.
Therefore, by the strict monotonicity assumptions we have
0 ≤ 〈∇f(p1)−∇f(p2),p2 − p1〉 < 0,
contradiction.(b) It follows from Theorem 16.2 (a).
Usually, the set of Nash-Stampacchia points and the set of Nash equi-librium points are different. A simple example which support this state-ment is presented in what follows, see also [153].
Example 16.1 Let K1 = K2 = [−1, 1], D1 = D2 = R, and f1, f2 :D1 ×D2 → R defined by
f1(x1, x2) = x21x2 + x1, f2(x1, x2) = −x2
1x22 + x2.
One can prove that the set of Nash-Stampacchia points for (f ,K) is
(1/2,−1), (−1, 1/2), (−1,−1), (1,−1).However, the unique Nash equilibrium point for (f ,K) is (−1,−1).
In the rest of this section we assume that X is a prehilbert space.Consequently, the inequality from the definition of Nash-Stampacchiapoint for (f ,K) can be written equivalently as
〈(p− α∇f(p))− p,q− p〉 ≤ 0 for all q ∈ K, α > 0.

16.2 Nash equilibria and variational inequalities 331
Furthermore, in terms of projections, the Moskovitz-Dines type relation,see relation 15.2, gives actually that
p ∈ PK(p− α∇f(p)) for all α > 0.
Note that since K is convex, it is also a Chebyshev set, i.e., the aboverelation has the form
0 = PK(p− α∇f(p))− p for all α > 0.
The last relation motivates the study of the following continuous dy-namical system
x(t) = PK(x(t)− α∇f(x(t)))− x(t), (16.1)
where α > 0 is fixed. Following Cavazzuti, Pappalardo and Passacan-tando [62], we prove
Theorem 16.4 Assume that ∇f(p) = 0. If ∇f is strongly monotoneon K with constant η > 0 and Lipschitz continuous on K with constantL > 0, then there exists α0 > 0 such that for every α ∈ (0, α0) thereexists a constant C > 0 such that for each solution x(t) of (16.1), withx(0) ∈ K, we have
‖x(t)− p‖ ≤ ‖x(0)− p‖ exp(−Ct), ∀t ≥ 0,
i.e., x(t) converges exponentially to p ∈ K.
Proof First of all, due to the non-expansiveness of the projection oper-ator PK, we have that
‖PK(x(t)− α∇f(x(t)))− p‖2 =
= ‖PK(x(t)− α∇f(x(t)))− PK(p− α∇f(p))‖2 ≤
≤ ‖x(t)− p− α(∇f(x(t))−∇f(p))‖2
= ‖x(t)−p‖2−2α〈∇f(x(t))−∇f(p),x(t)−p〉+α2‖∇f(x(t))−∇f(p)‖2
≤ (1− 2αη + α2L2)‖x(t)− p‖2.Let α0 = 2η/L2 and α ∈ (0, α0). Note that the whole orbit of x(t)remains in K. We consider the function
h(t) =12‖x(t)− p‖2.

332 A Variational Approach of the Nash Equilibria
Then, we have
h(t) = 〈x(t)− p, PK(x(t)− α∇f(x(t)))− x(t)〉= 〈x(t)− p, PK(x(t)− α∇f(x(t)))− p〉 − ‖x(t)− p‖2≤ ‖x(t)− p‖ · ‖PK(x(t)− α∇f(x(t)))− p‖ − ‖x(t)− p‖2≤ (
√1− 2αη + α2L2 − 1)‖x(t)− p‖2
= −2Ch(t),
where C = 1 −√
1− 2αη + α2L2 > 0. Consequently, we have h(t) ≤−2Ch(t), with h(0) = 1
2‖x(0)−p‖2. After an integration, we have that
‖x(t)− p‖ ≤ ‖x(0)− p‖ exp(−Ct), ∀t ≥ 0.
The proof is complete.
16.3 Nash equilibria for set-valued maps
In some cases the objective/payoff functions are not single-valued, i.e.,the values of a payoff functions are not real numbers but some sets.Set-valued versions of the Nash equilibrium problem can be founded inthe literature, see for example Guillerme [134] and Luo [196]. In thissection we propose a new approach in the study of the existence ofNash equilibria for set-valued maps which is based on the contingentderivative.
Let K1, . . . , Kn be nonempty subsets of a real normed space X, andlet Fi : K Ã R (i ∈ 1, . . . , n) be set-valued maps with nonemptycompact values. A point p = (p1, . . . , pn) ∈ K is a Nash equilibriumpoint for (F,K) = (F1, . . . , Fn;K1, . . . , Kn) if p is a Nash equilibriumpoint for (minF,K).
The following result is an easy consequence of Theorem 16.1.
Theorem 16.5 Let K1, . . . , Kn be nonempty compact convex subsetsof a real normed space X, and let Fi : K à R (i ∈ 1, . . . , n) becontinuous set-valued maps on K with nonempty compact values suchthat qi ∈ Ki à Fi(p; qi) is convex on Ki for all fixed pj ∈ Kj (j 6= i).Then there exists a Nash equilibrium point for (F,K).
Proof Let fi = min Fi (i ∈ 1, . . . , n). It is easy to prove that thefunctions fi are continuous and convex in the ith variable. We applyTheorem 16.1.

16.3 Nash equilibria for set-valued maps 333
Let K = K1 = K2 = [−1, 1], X = R, and F1, F2 : K × K Ã R bedefined by
F1(x1, x2) = [max|x1|, |x2| − 1, 0]; (16.2)
F2(x1, x2) = [1−max|x1|, |x2|, 2− x21 − x2
2]. (16.3)
Clearly, F1 and F2 are continuous on K ×K, but x2 ∈ K Ã F2(0, x2)is not convex on K. Therefore, Theorem 16.5 can not be applied. How-ever, we will see in Example 16.2 that there are Nash equilibrium pointsfor (F,K) = (F1, F2; K, K). To determine these points we elaborate amethod by using the contingent derivative of set-valued maps.
Let K1, . . . , Kn be nonempty convex subsets of a real normed spaceX, and let Fi : K1×. . .×X×. . .×Kn à R (i ∈ 1, . . . , n) be set-valuedmaps with compact, nonempty values. Here, X is in the ith position.Let be a fixed element. We can define the (partial) contingent derivativeof Fi in the ith variable at the point (p, min Fi(p)), i.e., the contingentderivative of Fi(p1, . . . , pi−1, ·, pi+1, . . . , pn) at the point (pi, min Fi(p)),see Appendix, Definition E.4.
Definition 16.1 A point p = (p1, . . . , pn) ∈ K is said to be a Nashcontingent point for (F,K) if
DiFi(p, min Fi(p))(qi − pi) ⊆ R+
for all qi ∈ Ki and all i ∈ 1, . . . , n.
Proposition 16.1 Let p = (p1, . . . , pn) ∈ K be a Nash equilibrium pointfor (F,K)). If each map qi à Fi(p; qi) (i ∈ 1, . . . , n) is Ki-locallyLipschitz, then p is a Nash contingent point for (F,K).
Proof Since p is a Nash equilibrium point for (F,K), we have
Fi(p; qi)−min Fi(p) ⊆ R+ (16.4)
for all qi ∈ Ki and all i ∈ 1, . . . , n.Let i ∈ 1, . . . , n, qi ∈ Ki be fixed elements and we fix arbitrarily
ci ∈ DiFi(p, minFi(p))(qi − pi). We prove that ci ≥ 0. From (E.2) wehave that
lim inft→0+
dist(
ci,Fi(p; pi + t(qi − pi))−min Fi(p)
t
)= 0, (16.5)
since the map vi à Fi(p; vi) is Ki-locally Lipschitz. Since Ki is convex,

334 A Variational Approach of the Nash Equilibria
for t > 0 small enough, yti = pi + t(qi − pi) ∈ Ki. Using (16.4), we have
thatFi(p; yt
i)−min Fi(p)t
⊆ R+.
Suppose that ci < 0. Then
0 < |ci| = dist(ci,R+) ≤ dist(
ci,Fi(p; yt
i)−min Fi(p)t
),
which is in contradiction with (16.5).
The above proposition allows to select the Nash equilibrium pointsfrom the set of Nash contingent points. In most of the cases the de-termination of contingent Nash points is much more easier than thoseof the Nash equilibrium points. We will present two examples in thisdirection. We will use the notation
ba, bc = [mina, b,maxa, b], where a, b ∈ R.
Example 16.2 Let us consider the set-valued maps from (16.2) and(16.3) in extended forms, i.e. K = K1 = K2 = [−1, 1], X = R and letF1 : X ×K Ã R, F2 : K ×X Ã R be defined by
F1(x1, x2) = bmax|x1|, |x2| − 1, 0c;
F2(x1, x2) = b1−max|x1|, |x2|, 2− x21 − x2
2c.It is easy to verify that u ∈ K Ã F1(u, x2) and v ∈ K Ã F2(x1, v) areK-locally Lipschitz maps (x1, x2 ∈ K being fixed points). We are firstlooking for those points (x1, x2) ∈ K ×K which fulfill
D1F1((x1, x2), min F1(x1, x2))(v1 − x1) ⊆ R+ for all v1 ∈ K; (16.6)
D2F2((x1, x2),min F2(x1, x2))(v2 − x2) ⊆ R+ for all v2 ∈ K. (16.7)
Using the geometric meaning of the contingent derivative (see relation(E.1)), after an elementary discussion and computation, the points whichsatisfy the inclusions (16.6) and (16.7) respectively, are
CNP1 = (x1, x2) ∈ K ×K : |x1| ≤ |x2|;
CNP2 = (x1, x2) ∈ K×K : |x1| > |x2|∪(x1, x2) ∈ K×K : |x2| = 1.Therefore, the contingent Nash points for (F,K) = (F1, F2;K,K) are
CNP = CNP1 ∩ CNP2 = (x1, x2) ∈ K ×K : |x2| = 1.

16.3 Nash equilibria for set-valued maps 335
A direct computation shows that the set of Nash equilibrium points for(F,K) coincides the set CNP.
Example 16.3 Let K = [−1, 1], and let F1 : R × K Ã R and F2 :K × R Ã R be defined by
F1(x1, x2) = b2, |x1 − 1|c, if x2 ≥ 0,
b2, |x1 + 1|c, if x2 < 0,
and
F2(x1, x2) = b2, |x2 + 1|c, if x1 ≥ 0,
b2, |x2 − 1|c, if x1 < 0.
The points which satisfy the corresponding inclusions from (16.6) and(16.7) respectively, are
CNP1 = (1, x2) : x2 ∈ [0, 1] ∪ (−1, x2) : x2 ∈ [−1, 0);
CNP2 = (x1,−1) : x1 ∈ [0, 1] ∪ (x1, 1) : x1 ∈ [−1, 0).The maps u ∈ K Ã F1(u, x2) and v ∈ K Ã F2(x1, v) are K-locallyLipschitz (x1, x2 ∈ K being fixed points), however the set of Nash con-tingent points for (F,K) = (F1, F2; K,K) is CNP = CNP1 ∩ CNP2,
which is empty. Hence the set of Nash equilibrium points is empty too,due to Proposition 16.1.
Note that the set-valued maps from Examples 16.2 and 16.3 are notcontinuous on K × K. In the sequel, we give sufficient conditions toobtain Nash contingent points, assuming some continuity hypotheseson the set-valued maps. Before to do this, we can state the converse ofProposition 16.1 by taking a convexity assumption for the correspondingset-valued maps. Let X be a normed space, and let K be a nonemptysubset of X.
Definition 16.2 The set-valued map F : X Ã R is called K-pseudo-convex at (u, c) ∈ Graph(F ) if
F (u′) ⊆ c + DF (u, c)(u′ − u) for all u′ ∈ K.
In the case when K = Dom(F ), the above definition reduces to [16,Definition 5.1.1]. The following result can be easily proved.
Proposition 16.2 Let K1, . . . ,Kn be nonempty subsets of a real normed

336 A Variational Approach of the Nash Equilibria
space X, and let Fi : K1× . . .×X× . . .×Kn à R (i ∈ 1, . . . , n) be set-valued maps with nonempty compact values. Let p = (p1, . . . , pn) ∈ K bea Nash contingent point for (F,K). If qi à Fi(p; qi) (i ∈ 1, . . . , n) isKi-pseudo-convex at (pi, min Fi(p)), then p is a Nash equilibrium pointfor (F,K).
We give and existence theorem concerning the Nash contingent pointsfor a system (F,K) by using a Ky Fan type result proved by Kristalyand Varga [176]:
Theorem 16.6 Let X be a real normed space, let K be a nonemptyconvex compact subset of X, and let F : K×K Ã R be a set-valued mapsatisfying the following conditions:
(i) for all v ∈ K, u ∈ K Ã F (u, v) is lower semicontinuous on K;(ii) for all u ∈ K, v ∈ K Ã F (u, v) is convex on K;(iii) for all u ∈ K, F (u, u) ⊆ R+.
Then there exists an element u ∈ K such that
F (u, v) ⊆ R+ for all v ∈ K. (16.8)
Let Ki and Fi (i ∈ 1, . . . , n) be as in Proposition 16.2. We denoteby Fi|K the restriction of Fi to K = K1 × . . .×Ki × . . .×Kn.
Definition 16.3 Fi|K is called i-lower semicontinuously differentiableif
Graph(Fi |K)×X 3 (p, c, h) Ã DiFi(p, c)(h)
is lower semicontinuous.
Now, we are in the position to give an existence result concerning theNash contingent points.
Theorem 16.7 Let K1, . . . , Kn be nonempty compact convex subsetsof a real normed space X and let Fi : K1 × . . . × X × . . . × Kn à R(i ∈ 1, . . . , n) be set-valued maps with nonempty compact values andwith closed graph. Suppose that for each i ∈ 1, . . . , n the map Fi is Ki-locally Lipschitz in the ith variable, Fi|K is continuous on K and i-lowersemicontinuously differentiable. Then there exists a Nash contingentpoint for (F,K).
Proof Let X = X × . . .×X. Clearly, K is a compact, convex subset of

16.3 Nash equilibria for set-valued maps 337
X. We define the map G : K×K Ã R by
G(p,q) =n∑
i=1
DiFi(p,min Fi(p))(qi − pi),
where p = (p1, . . . , pn) and q = (q1, . . . , qn). We will verify the hypothe-ses from Theorem 16.6.
(i) Let us fix q ∈ K. Since the sum of finite lower semicontinuousmaps is lower semicontinuous, it is enough to prove that p ∈ K ÃDiFi(p,min Fi(p))(qi − pi) is lower semicontinuous on K for each i ∈1, . . . , n. To do this, let us fix an p ∈ K. Now, let ci ∈ DiFi(p, min Fi(p))(qi−pi) and pm be a sequence from K which converges to p. Since Fi|Kis continuous on K, the function min(Fi|K) is also continuous. There-fore min Fi(pm) → min Fi(p) as m → ∞. Using the fact that Fi|Kis i-lower semicontinuously differentiable, there exists a sequence cm
i ∈DiFi(pm, min Fi(pm))(qi − pm
i ) such that cmi → ci as m →∞.
(ii) Let us consider p ∈ K. fixed. We will prove that q ∈ K à G(p,q)is convex on K. Since the sum of convex maps is also convex, it is enoughto prove that q ∈ K à DiFi(p, min Fi(p))(qi− pi) is convex. Using thefact that Fi|K is i-lower semicontinuously differentiable (in particularqi à Fi(p; qi) is sleek at (pi,min Fi(p))) and Remark E.2, the aboveset-valued map is a closed convex process.
(iii) Let p ∈ K and i ∈ 1, . . . , n be fixed. We prove that everyelement ci from DiFi(p, min Fi(p))(0) is non-negative. In fact, sinceqi à Fi(p; qi) is Ki-locally Lipschitz, from (E.2) we have
lim inft→0+
dist(
ci,Fi(p; pi + t · 0)−min Fi(p)
t
)= 0.
SinceFi(p)−min Fi(p)
t⊆ R+ for all t > 0,
we obtain that ci ≥ 0. Therefore, G(p,p) =∑n
i=1 DiFi(p,min Fi(p))(0) ⊆R+.
By Theorem 16.6 we obtain an element p = (p1, . . . , pn) ∈ K suchthat
n∑
i=1
DiFi(p,min Fi(p))(qi − pi) ⊆ R+ for all q ∈ K. (16.9)
Let i ∈ 1, . . . , n be fixed. We may choose qj = pj , j 6= i. Since

338 A Variational Approach of the Nash Equilibria
the (partial) contingent derivatives are closed convex process, we clearlyhave that 0 ∈ DjFj(p, min Fj(p))(0), j 6= i. From (16.9), we obtain
DiFi(p, min Fi(p))(qi − pi) ⊆ R+ for all qi ∈ Ki.
The proof is complete.
Using Remark E.1, we immediately obtain a consequence of the abovetheorem. A similar result was obtained by Kassay, Kolumban and Pales[153].
Corollary 16.1 Let K1, . . . , Kn be nonempty compact convex subsets ofa real normed space X and let fi : K1 × . . . ×X × . . . ×Kn → R (i ∈1, . . . , n) be continuous functions. Suppose that there exist open convexsets Di ⊆ X such that Ki ⊆ Di and fi is continuously differentiable inthe ith variable on Di and ∂ifi is continuous on K1× . . .×Di× . . .×Kn.
Then there exists an element p ∈ K such that
〈∂ifi(p), qi − pi〉 ≥ 0
for all qi ∈ Ki and all i ∈ 1, . . . , n.
Example 16.4 Let K = K1 = K2 = [−1, 1], X = D1 = D2 = R, andlet f1, f2 : D1 ×D1 → R be defined by
f1(x1, x2) = x1x2 + x21, f2(x1, x2) = x2 − 3x1x
22.
Clearly, the above sets and functions satisfy the assumptions from Corol-lary 16.1, hence a solution for the above system is guaranteed. It iseasy to observe that, for i ∈ 1, 2, we have ∂ifi(x1, x2)(vi − xi) ≥0 for all vi ∈ K if and only if• ∂ifi(x1, x2) = 0 if −1 < xi < 1;• ∂ifi(x1, x2) ≥ 0, if xi = −1 and• ∂ifi(x1, x2) ≤ 0 if xi = 1.
Discussing all the cases, we establish that the set of Nash contingentpoints for (f ,K) = (f1, f2;K,K) is CNP = ( 1
2 ,−1). This point willbe also a Nash equilibrium point for (f ,K).
16.4 Lack of convexity: a Riemannian approach
In this section we are going to treat a case when the strategy sets Ki
are not necessarily convex in the usual sense. In order to handle thisproblem a geometrical method will be exploited: we assume that one

16.4 Lack of convexity: a Riemannian approach 339
can find suitable Riemannian manifolds (Mi, gi) such that the set Ki
becomes a geodesic convex set in Mi. Note that the choice of suchRiemannian structures does not influence the Nash equilibrium pointsfor (f ,K). Moreover, after fixing these manifolds if the payoff functionsfi become convex on Ki (i.e., fi γi : [0, 1] → R is convex in the usualsense for every geodesic γi : [0, 1] → Ki), the following existence resultmay be stated.
Theorem 16.8 Let (Mi, gi) be finite-dimensional Riemannian mani-folds, Ki ⊂ Mi be nonempty, compact, geodesic convex sets, and fi :K → R be continuous functions such that Ki 3 qi 7→ fi(p; qi) is con-vex on Ki for every p ∈ K, i ∈ 1, . . . , n. Then, there exists a Nashequilibrium point for (f ,K).
Proof We apply Theorem 13.5 by choosing X = K = Πni=1Ki and h :
X×X → R defined by h(q,p) =∑n
i=1[fi(p; qi)−fi(p)]. First of all, notethat the sets Ki are ANRs, being closed subsets of finite-dimensionalmanifolds (thus, locally contractible spaces). Moreover, since a productof a finite family of ANRs is an ANR (see Bessage and Pelczynski [37,p. 69]), it follows that X is an ANR. Due to Proposition 13.2, X iscontractible, thus acyclic.
Note that the function h is continuous, and h(p,p) = 0 for everyp ∈ X. Consequently, the set (q,p) ∈ X ×X : 0 > h(q,p) is open.
It remains to prove that Sp = q ∈ X : 0 > h(q,p) is contractible orempty for all p ∈ X. Assume that Sp 6= ∅ for some p ∈ X. Then, thereexists i0 ∈ 1, ..., n such that fi0(p; qi0)−fi0(p) < 0 for some qi0 ∈ Ki0 .
Therefore, q = (p; qi0) ∈ Sp, i.e., priSp 6= ∅ for every i ∈ 1, ..., n. Now,we fix qj = (qj
1, ..., qjn) ∈ Sp, j ∈ 1, 2 and let γi : [0, 1] → Ki be the
unique geodesic joining the points q1i ∈ Ki and q2
i ∈ Ki (note thatKi is geodesic convex), i ∈ 1, ..., n. Let γ : [0, 1] → K defined byγ(t) = (γ1(t), ..., γn(t)). Due to the convexity of the function Ki 3 qi 7→fi(p; qi), for every t ∈ [0, 1], we have
h(γ(t),p) =n∑
i=1
[fi(p; γi(t))− fi(p)]
≤n∑
i=1
[tfi(p; γi(1)) + (1− t)fi(p; γi(0))− fi(p)]
= th(q2,p) + (1− t)h(q1,p)
< 0.

340 A Variational Approach of the Nash Equilibria
Consequently, γ(t) ∈ Sp for every t ∈ [0, 1], i.e., Sp is a geodesic con-vex set in the product manifold M = Πn
i=1Mi endowed with its natural(warped-)product metric (with the constant weight functions 1), seeO’Neill [230, p. 208]. Now, Proposition 13.2 implies that Sp is con-tractible. Alternatively, we may exploit the fact that the projectionspriSp are geodesic convex, thus contractible sets, i ∈ 1, ..., n.
On account of Theorem 13.5, there exists p ∈ K such that 0 =h(p,p) ≤ h(q,p) for every q ∈ K. In particular, putting q = (p; qi),qi ∈ Ki fixed, we obtain that fi(p; qi)−fi(p) ≥ 0 for every i ∈ 1, ..., n,i.e., p is a Nash equilibrium point for (f ,K).
Our further investigation is motivated by the following two questions:
• What about the case when some payoff functions fi are not convex onKi in spite of the geodesic convexity of Ki on (Mi, gi)?
• Even for convex payoff functions fi on Ki, how can we localize theNash equilibrium points for (f ,K)?
The following concept is destined for simultaneously handling the abovequestions.
Let (Mi, gi) be complete finite-dimensional Riemannian manifolds,Ki ⊂ Mi be nonempty, geodesic convex sets, and fi : (K;Di) → Rfunctions such that Di 3 qi 7→ fi(p; qi) is of class C1 for every p ∈ K,where (K; Di) = K1 × ... × Di × ... × Kn, with Di open and geodesicconvex, and Ki ⊆ Di ⊆ Mi, i ∈ 1, . . . , n.
A point p = (p1, . . . , pn) ∈ K is a Nash critical point for (f ,K) if
gi(∂ifi(p), exp−1pi
(qi)) ≥ 0 for all qi ∈ Ki, i ∈ 1, . . . , n.Here, ∂ifi(p) denotes the ith partial derivative of fi at the point pi ∈ Ki.
A useful relation between Nash equilibrium points and Nash criticalpoints is established by the following result.
Proposition 16.3 Any Nash equilibrium point for (f ,K) is a Nashcritical point for (f ,K). In addition, if Di 3 qi 7→ fi(p; qi) is convex forevery p ∈ K, i ∈ 1, . . . , n, the converse also holds.
Proof Let p ∈ K be a Nash equilibrium point for (f ,K). In particular,for every qi ∈ Ki with i ∈ 1, . . . , n fixed, the geodesic segment t 7→exppi
(t exp−1pi
(qi)), t ∈ [0, 1] joining the points pi and qi, belongs entirelyto Ki; thus,
fi(p; exppi(t exp−1
pi(qi)))− fi(p) ≥ 0 for all t ∈ [0, 1]. (16.10)

16.4 Lack of convexity: a Riemannian approach 341
Combining relation (16.10) with
gi(∂ifi(p), exp−1pi
(qi)) = limt→0+
fi(p; exppi(t exp−1
pi(qi)))− fi(p)
t,
we indeed have that p ∈ K is a Nash critical point for (f ,K).Now, let us assume that p ∈ K is a Nash critical point for (f ,K), i.e.,
0 ≤ gi(∂ifi(p), exp−1pi
(qi)) = limt→0+
fi(p; exppi(t exp−1
pi(qi)))− fi(p)
t.
(16.11)The function
g(t) =fi(p; exppi
(t exp−1pi
(qi)))− fi(p)t
is well-defined on the whole interval (0, 1]; indeed, t 7→ exppi(t exp−1
pi(qi))
is the minimal geodesic joining the points pi ∈ Ki and qi ∈ Ki whichbelongs to Ki ⊂ Di. Moreover, a standard computation shows thatt 7→ g(t) is non-decreasing on (0, 1] due to the convexity of Di 3 qi 7→fi(p; qi). Consequently, (16.11) implies that
0 ≤ limt→0+
g(t) ≤ g(1) = fi(p; exppi(exp−1
pi(qi)))−fi(p) = fi(p; qi)−fi(p),
which completes the proof.
In order to state our existence result concerning Nash critical points,we consider the hypothesis
(H) Ki 3 qi 7→ gi(∂ifi(p), exp−1pi
(qi)) is convex for every p ∈ K andi ∈ 1, ..., n.
Remark 16.1 Let I1, I2 ⊆ 1, ..., n be such that I1 ∪ I2 = 1, ..., n.Hypothesis (H) holds, for instance, when
• (Mi, gi) is Euclidean, i ∈ I1;• Ki = Imγi where γi : [0, 1] → Mi is a minimal geodesic, i ∈ I2.
(a) In the first case, we have exppi= idRdim Mi ; in this case Ki 3 qi 7→
〈∂ifi(p), qi − pi〉 becomes affine, so convex.(b) In the second case, if σi : [0, 1] → Mi is a geodesic segment joining
the points σi(0) = γi(t0) with σi(1) = γi(t1) (0 ≤ t0 < t1 ≤ 1), thenImσi ⊆ Imγi = Ki. Fix pi = γi(ti) ∈ Ki (0 ≤ ti ≤ 1). Let a0, a1 ∈ R(a0 < a1) such that exppi
(a0γ′i(ti)) = γi(t0) and exppi
(a1γ′i(ti)) = γi(t1).
Then, σi(t) = exppi((a0 + (a1 − a0)t)γ′i(ti)). Now, the claim easily
follows since the convexity of function from (H) reduces to the affinityof t 7→ gi(∂ifi(p), (a0 + (a1 − a0)t)γ′i(ti)).

342 A Variational Approach of the Nash Equilibria
Theorem 16.9 Let (Mi, gi) be complete finite-dimensional Riemannianmanifolds, Ki ⊂ Mi be nonempty, compact, geodesic convex sets andfi : (K; Di) → R continuous functions such that Di 3 qi 7→ fi(p; qi) isof class C1 for every p ∈ K, i ∈ 1, . . . , n. If (H) holds, there exists aNash critical point for (f ,K).
Proof The proof is similar to that of Theorem 16.8; we show only thedifferences. Let X = K = Πn
i=1Ki and h : X × X → R defined byh(q,p) =
∑ni=1 gi(∂ifi(p), exp−1
pi(qi)). It is clear that h(p,p) = 0 for
every p ∈ X.
First of all, the (upper-semi)continuity of h(·, ·) on X ×X implies thefact that the set (q,p) ∈ X ×X : 0 > h(q,p) is open.
Now, let p ∈ X such that Sp = q ∈ X : 0 > h(q,p) is not empty.Then, there exists i0 ∈ 1, ..., n such that gi0(∂i0fi0(p), exp−1
pi0(qi0)) < 0
for some qi0 ∈ Ki0 . Consequently, q = (p; qi0) ∈ Sp, i.e., priSp 6= ∅ forevery i ∈ 1, ..., n. Now, we fix qj = (qj
1, ..., qjn) ∈ Sp, j ∈ 1, 2, and
let γi : [0, 1] → Ki be the unique geodesic joining the points q1i ∈ Ki and
q2i ∈ Ki. Let also γ : [0, 1] → K defined by γ(t) = (γ1(t), ..., γn(t)). Due
to hypotheses (H), the convexity of the function [0, 1] 3 t 7→ h(γ(t),p),t ∈ [0, 1] easily follows. Therefore, γ(t) ∈ Sp for every t ∈ [0, 1], i.e., Sp
is a geodesic convex set, thus contractible.Theorem 13.5 implies the existence of p ∈ K such that 0 = h(p,p) ≤
h(q,p) for every q ∈ K. In particular, if q = (p; qi), qi ∈ Ki fixed, weobtain that gi(∂ifi(p), exp−1
pi(qi)) ≥ 0 for every i ∈ 1, ..., n, i.e., p is a
Nash critical point for (f ,K). The proof is complete.
Remark 16.2 Proposition 16.3 and Theorem 16.9 give together a pos-sible answer to the location of Nash equilibrium points. Indeed, onaccount of Theorem 16.9 we are able to find explicitly the Nash criticalpoints for (f ,K); then, due to Proposition 16.3, among Nash criticalpoints for (f ,K) we may choose the Nash equilibrium points for (f ,K).
Remark 16.3 The set of Nash critical points and the set of Nash equi-librium points are usually different. Indeed, let f1, f2 : [−1, 1]2 → R bedefined by f1(x1, x2) = f2(x1, x2) = x3
1 + x32. Note that (0, 0), (0,−1),
(−1, 0) and (−1,−1) are Nash critical points, but only (−1,−1) is aNash equilibrium point for (f1, f2; [−1, 1], [−1, 1]).
The following examples show the applicability of our results.

16.4 Lack of convexity: a Riemannian approach 343
Example 16.5 Let K1 = [−1, 1], K2 = (cos t, sin t) : t ∈ [π/4, 3π/4],and f1, f2 : K1 ×K2 → R defined for every x ∈ K1, (y1, y2) ∈ K2 by
f1(x, (y1, y2)) = |x|y21 − y2, f2(x, (y1, y2)) = (1− |x|)(y2
1 − y22).
Note that K1 ⊂ R is convex in the usual sense, but K2 ⊂ R2 is not.However, if we consider the Poincare upper-plane model (H2, gH), theset K2 ⊂ H2 is geodesic convex with respect to the metric gH, being theimage of a geodesic segment from (H2, gH). It is clear that f1(·, (y1, y2))is a convex function on K1 in the usual sense for every (y1, y2) ∈ K2.Moreover, f2(x, ·) is also a convex function on K2 ⊂ H2 for every x ∈K1. Indeed, the latter fact reduces to the convexity of the functiont 7→ (1−|x|) cos(2t), t ∈ [π/4, 3π/4]. Therefore, Theorem 16.8 guaranteesthe existence of at least one Nash equilibrium point for (f1, f2; K1,K2).Using Proposition 16.3, a simple calculation shows that the set of Nashequilibrium (=critical) points for (f1, f2;K1,K2) is K1 × (0, 1).
Example 16.6 Let K1 = [−1, 1]2, K2 = (y1, y2) : y2 = y21 , y1 ∈ [0, 1],
and f1, f2 : K1 ×K2 → R defined for every (x1, x2) ∈ K1, (y1, y2) ∈ K2
by
f1((x1, x2), (y1, y2)) = −x21y2+x2y1, f2((x1, x2), (y1, y2)) = x1y
22+x2y
21 .
The set K1 ⊂ R2 is convex, but K2 ⊂ R2 is not in the usual sense.However, K2 may be considered as the image of a geodesic segmenton the paraboloid of revolution prev(u, v) = (v cos u, v sin u, v2). Moreprecisely, K2 becomes geodesic convex on Imprev, being actually a com-pact part of a meridian on Imprev. Note that neither f1(·, (y1, y2)) norf2((x1, x2), ·) is convex (the convexity of the latter function being con-sidered on K2 ⊂Imprev); thus, Theorem 16.8 is not applicable. In viewof Remark 16.1 (c), Theorem 16.9 can be applied in order to determinethe set of Nash critical points. This set is nothing but the set of solutionsin the form ((x1, x2), (y, y2)) ∈ K1 ×K2 of the system
−2x1y2(x1 − x1) + y(x2 − x2) ≥ 0, ∀(x1, x2) ∈ K1,
y(2y2x1 + x2)(y − y) ≥ 0, ∀y ∈ [0, 1].(SystemNCP)
We distinguish three cases: (a) y = 0; (b) y = 1; and (c) 0 < y < 1.(a) y = 0. Then, any ((x1, x2), (0, 0)) ∈ K1 ×K2 solves (SystemNCP).(b) y = 1. After an easy computation, we obtain that ((−1,−1), (1, 1)) ∈
K1 ×K2 and ((0,−1), (1, 1)) ∈ K1 ×K2 solve (SystemNCP).

344 A Variational Approach of the Nash Equilibria
(c) 0 < y < 1. The unique situation when (SystemNCP) is solv-able is y =
√2/2. In this case, (SystemNCP) has a unique solution
((1,−1), (√
2/2, 1/2)) ∈ K1 ×K2.Consequently, the set of Nash critical points for (f1, f2; K1,K2), de-
noted in the sequel by SNCP, is the union of the points from (a), (b) and(c), respectively.
Let us denote by SNEP the set of Nash equilibrium points for (f1, f2;K1,K2).Due to Proposition 16.3, we may select the elements of SNEP from SNCP.Therefore, the elements of SNEP are the solutions ((x1, x2), (y, y2)) ∈SNCP of the system
−x21y
2 + x2y ≥ −x21y
2 + x2y, ∀(x1, x2) ∈ K1,
x1y4 + x2y
2 ≥ x1y4 + x2y
2, ∀y ∈ [0, 1].(SystemNEP)
We consider again the above three cases.(a) y = 0. Among the elements ((x1, x2), (0, 0)) ∈ K1×K2 which solve
(SystemNCP), only those are solutions for (SystemNEP) which fulfill thecondition x2 ≥ max−x1, 0.
(b) y = 1. We have ((−1,−1), (1, 1)) ∈ SNEP, but ((0,−1), (1, 1)) /∈SNEP.
(c) 0 < y < 1. We have ((1,−1), (√
2/2, 1/2)) ∈ SNEP.
16.5 Historical comments and perspectives
A. Historical comments. Although many extensions and applicationscan be found of Nash’s result (see, for instance, Chang [66], Georgiev[125], Guillerme [134], Kulpa and Szymanski [181], Luo [196], Morganand Scalzo [214], Yu and Zhang [295], and references therein), to thebest of our knowledge, only a few works can be found in the literaturedealing with the question addressed in the Introduction, i.e., the locationof Nash equilibrium points for a functions with non-usual properties (forinstance, set-valued maps) which are defined on sets with non-standardstructures. Nessah and Kerstens [226] characterize the existence of Nashequilibrium points on non-convex strategy sets via a modified diagonaltransfer convexity notion; Tala and Marchi [283] also treat games withnon-convex strategies reducing the problem to the convex case via cer-tain homeomorphism; Kassay, Kolumban and Pales [153] and Ziad [298]considered Nash equilibrium points on convex domains for non-convexpayoff functions having suitable regularity instead of their convexity.
In this chapter we treated the existence and location of Nash equilib-rium points in various context. Via variational inequalities and dynam-

16.5 Historical comments and perspectives 345
ical systems, we established stability results concerning Nash criticalpoints following the paper of Cavazzuti, Pappalardo and Passacantando[62]. In Section 16.3 we studied Nash equilibrium points for set-valuedmaps on vector spaces. The purpose of the last section was to initiate anew approach concerning the study of Nash equilibria, where the payofffunctions are defined on sets which are not necessarily convex in theusual sense, by embedding these sets into suitable Riemannian mani-folds.
B. Perspectives. The main challenging question is to study the (expo-nential) stability of Nash critical points for functions which are definedon sets embedded into certain Riemannian manifolds. Since the non-expansiveness and the validity of Moskovitz-Dines property of the pro-jection operator are indispensable in such an argument (see Theorem16.4), we believe that this fact is possible only for those cases where thestrategy sets can be embedded into Hadamard-type Riemannian mani-foldsm (see Theorems 15.4 and 15.8).

17
Problems to Part III
God exists since mathematicsis consistent, and the Devilexists since we cannot prove it.
Andre Weil (1906–1998)
Problem 17.1 Prove that (Int(MC), dH) is a metric space, where C is asimple, closed and convex curves and dH is the Hilbert distance. [Hint:See Section 13.2]
Problem 17.2 Let C be an ellipse with semi-axes a > b > 0, andconsider three points P1 = (a/2, 0), P2 = (−a/2, 0) and P3 = (a/2,−b/2)in the interior of the ellipse Int(MC). Determine the minimum pointsof the total cost function C(Pi, 3, s) =
∑3i=1 ds
H(·, Pi) on Int(MC) fors = 1 and s = 2, respectively.
Problem 17.3 Let M = Rm, m ≥ 2, be endowed with the naturalEuclidean metric, and Pi ∈ M, i = 1, ..., n given points. Prove thatthe unique minimum point Tf = Tb (i.e., the place of the deposit) forCf (Pi, n, s) = Cb(Pi, n, s) is the center of gravity of points P1, ..., Pnif and only if s = 2. [Hint: See Example 14.1]
Problem 17.4 There is a ship which moves on a closed curve and thereare n fixed ambulance stations. Suppose that at a certain moment,the ship’s crew asks for first-aid continuing their trip. Determine theposition of ambulance station from where the team assistance reachesthe ship within minimal time. [Hint: Follow Problem 14.1]
346

Problems to Part III 347
Problem 17.5 If M0 is a submanifold of the Riemannian manifold(M, g) and γ : [0, 1] → M is a geodesic of M with the properties thatγ(1) ∈ M0 and dg(γ(0), y) ≥ Lg(γ) for every y ∈ M0, then g(γ(1), X) =0 for every X ∈ Tγ(1)M0, i.e., γ is perpendicular to M0 at the point ofcontact. [Hint: Use the first variational formula and follow Proposition15.1]
Problem 17.6 If M1 and M2 are submanifolds of the Riemannian mani-fold (M, g) and γ : [0, 1] → M is a geodesic of M with the properties thatx0 = γ(0) ∈ M1, y0 = γ(1) ∈ M2, and dg(x, y) ≥ dg(x0, y0) = Lg(γ) forevery (x, y) ∈ M1×M2, then g(γ(0), X) = 0 and g(γ(1), Y ) = 0 for every(X, Y ) ∈ Tγ(0)M1 × Tγ(1)M2, i.e., γ is a common perpendicular of M1
and M2. [Hint: Use the first variational formula and follow Proposition15.1]
Problem 17.7 Let (M, g) be a simply connected Riemannian manifoldwith non-positive sectional curvature and let α, β : R → M be twogeodesics. We allow that β(t) =constant, and ‖α‖ = 1. The distancefunction f(t) = dg(α(t), β(t)) has the following properties:
1) the equation f(t) = 0 has at most one solution;2) f is a function of class C∞ for all t ∈ R with f(t) 6= 0.[Hint: Use the first and second variational formula.]
Problem 17.8 Let K1 = [−5, 3], K2 = (cos t, sin t) : t ∈ [π/4, 3π/4],and f1, f2 : K1 × K2 → R defined for every x ∈ K1, (y1, y2) ∈ K2
by f1(x, (y1, y2)) = x2y31 − y2
2 , f2(x, (y1, y2)) = (16 − x2)(y21 − y2
2).Determine the set of Nash equilibrium points for (f ,K).
Problem 17.9 Let K1 = (sin t, cos t) : t ∈ [π/8, 3π/7], K2 = (y1, y2) :y2 = y2
1 + 2, y1 ∈ [0, 2], and f1, f2 : K1 × K2 → R defined for ev-ery (x1, x2) ∈ K1, (y1, y2) ∈ K2 by f1((x1, x2), (y1, y2)) = 3x1y
22 +
2x32y
31 , f2((x1, x2), (y1, y2)) = 4x2
1y32 +5x2
2y1. Determine the set of Nashequilibrium points for (f ,K).
Problem 17.10 Let K = K1 = K2 = [−2, 3], X = R, and F1, F2 : K ×K Ã R be defined by F1(x1, x2) = [maxx2
1, x32−1, 0] and F2(x1, x2) =
[1−max|x1|, x22, 6 − x1 − x2
2]. Determine the set of Nash equilibriumpoints for (F,K) = (F1, F2; K, K).
Problem 17.11 (Location of Post Office) Let P1 = (1, 0) ∈ R2 and

348 Problems to Part III
P2 = (0, 1) ∈ R2 be two Post Offices, and let two players moving onthe set K = K ×K where K = (−∞, 0]. The purpose of the ith playeris to minimize the distance between (x1, x2) ∈ K and his favorite goalPi. What about the case when the players moving area is subject to thesocial constraint S = (x1, x2) ∈ K : x1 + x2 ≤ −2? [Hint: Use Nashpoint notions from Section 16.2.]

Appendices
349


A
Elements of convex analysis
By plucking her petals, you donot gather the beauty of theflower.
Rabindranath Tagore(1861–1941)
A.1 Convex sets and convex functions
Mathematically, the notion of convex set can be made precise by definingthe segment joining any two points x and y in a vector space to be theset of of all points having the form λx + (1 − λ)y for 0 ≤ λ ≤ 1. A setis convex if and only if it contains all the segments joining any two ofits points. The geometric nature of this definition is depicted in FiguresA.1 and A.2.
Given a collection of convex sets, it is always possible to create otherconvex sets by the operations of dilation, sum or intersection. Moreprecisely, if A and B are convex sets in a linear space then the sets
αA := αx; x ∈ A where α ∈ Rand
A + B := a + b; a ∈ A, b ∈ Bare convex, too. Moreover, any intersection of convex sets is convex.
The notion of convex function was introduced in the first part of thetwentieth century, though it was implicitly used earlier by Gibbs andMaxwell in order to describe relationships between thermodynamic vari-ables.
351

352 Elements of convex analysis
x
λx+(1-λ)y
y
Fig. A.1. Geometric illustration of a convex set.
x
y
Fig. A.2. Shape of a nonconvex set.
Definition A.1 Let C be a convex set in a linear space. A functionf : C→R is convex if and only if
f(λx + (1− λ)y) ≤ λf(x) + (1− λ)f(y) for any λ ∈ [0, 1].
Fig. A.3. Geometric illustration of a convex function.

A.1 Convex sets and convex functions 353
a b
y=f(x)
Fig. A.4. Geometric illustration of the epigraph of a function f : [a, b]→R.
Thus, a functional is convex if the segment connecting two points onits graph lies above the graph of the function, as shown in Figure A.3.Now, this definition is often expressed concisely by defining the set of allpoints that lie above the graph of a functional to be the epigraph (seeFigure A.4). This set plays an important role in optimization theoryand is usually referred in economics as an upper contour set.
Definition A.2 The epigraph of a functional f acting on a vector spaceX is the subset
epi (f) := (x, a) ∈ X × R; f(x) ≤ a .
The following result makes clear how the notions of convexity of a setand convexity of a functional are related.
Proposition A.1 Suppose f is a functional defined on a convex set.Then f is a convex functional if and only if the set epi (f) is convex.
We have seen in this volume that convexity plays an important rolein many optimization problems. In addition, some classes of inequalityconstraints couched in terms of convex cones are amenable to Lagrangemultiplier methods for abstract spaces. Convex cones are also used todefine orderings on vector spaces, which in turn facilitate the introduc-tion of inequality constraints.

354 Elements of convex analysis
Fig. A.5. A convex closed cone with vertex at the origin in R2.
Definition A.3 Let X be a vector space. A set C0 ⊂ X is a cone withvertex at the origin if
x ∈ X implies αx ∈ C0 ,
for all α ≥ 0. A cone with vertex at a point v ∈ X is defined to be thetranslation v + C of a cone C0 with vertex at the origin:
C = v + x; x ∈ C0 .
A positive cone C+0 ⊂ X is defined by
C+0 := x; x ∈ C0, x ≥ 0 .
A cone with vertex at the origin need not be convex. We also pointout that a cone need not be closed, in general. Examples of cones (eitherconvex or not convex ) are depicted in Figures A.5, A.6, and A.7.
The next theorem is a result due to Efimov and Stechkin in the theoryof best approximation. Roughly speaking, this property assures thatin a certain class of Banach spaces, every sequentially weakly closedChebyshev set is convex.
Theorem A.1 (Lemma 1 of [99], Theorem 2 of [285]) Let X be a uni-formly convex Banach space with strictly convex topological dual. As-sume that M is a sequentially weakly closed non–convex subset of X.
Then, for any convex dense subset S of X, there exists x0 ∈ S such

A.1 Convex sets and convex functions 355
Fig. A.6. A nonconvex closed cone with vertex at the origin in R2.
Fig. A.7. A nonconvex open cone with vertex at the origin in R2.
that the set
y ∈ M : ‖y − x0‖ = d(x0,M)
contains at least two points.

356 Elements of convex analysis
A.2 Convex analysis in Banach spaces
Throughout this section we assume that (X, || · ||) is a Banach space.
Definition A.4 Let α : X → (−∞, +∞] be a function and let x ∈ X
be a point where α is finite. The one-sided directional derivative of α atx with respect to a vector y ∈ X is
α′(x; y) = limλ0
α(x + λy)− α(x)λ
,
if it exists.
Lemma A.1 Let be α : X → (−∞,+∞] be a convex function, and letx ∈ X be a point where alpha(x) is finite. For each y ∈ X, the differencequotient in the definition of α′(x; y) is a non-decreasing function of λ >
0, so that α′(x; y) exists and
α′(x; y) = limλ0
α(x + λy)− α(x)λ
.
Moreover, α′(x; y) is a positively homogeneous convex of y ∈ X.
Definition A.5 Let α : X → (−∞, +∞] be a convex function. Anelement x? ∈ X is said to be a subgradient of the convex function α ata point x ∈ X provided that for any z ∈ X,
α(z) ≥ α(x) + 〈x?, z − x〉 .The set of all subgradient of α at x is called the subdifferential of α atx and is denoted by ∂α(x).
Lemma A.2 Let α : X → (−∞, +∞] be a convex function and letx ∈ X be a point where α(x) is finite. Then x? ∈ ∂α(x) if and only iffor all y ∈ X,
α′(x; y) ≥ 〈x?, y〉 .Now, let S ⊂ X be a non-empty closed convex set and denote by
αS : X → (−∞, +∞] the indicator function associated to S, that is,
jS(x) =
0, if x ∈ S
+∞, if x ∈ X \ S.(A.1)
In this case ∂αS(x) = x? ∈ X? | 〈x?, z − x〉 ≤ 0, ∀ z ∈ S, thatis, ∂αS(x) coincide with the normal cone associated to S at the pointx ∈ S. Thus, ∂αS(x) = NS(x).

A.2 Convex analysis in Banach spaces 357
Let S ⊂ X be a nonempty set. As usual, we denote the distancefunction distS : X → R defined by
distS(x) = inf‖x− y‖ : y ∈ S.It is clear that distS is a globally Lipschitz function. Consequently, onemay define its directional derivative in the sense of Clarke at the pointx ∈ S with direction v ∈ X, denoted by dist0S(x; v).
Definition A.6 Let x ∈ S. A vector v ∈ X is tangent to S at x ifdist0S(x; v) = 0. The set of tangent vectors of S at x is denoted byTS(x).
Note that TS(x) is a closed convex cone in X; in particular, 0 ∈ TS(x).
Definition A.7 Let x ∈ S. The normal cone to S at x is
NS(x) = x∗ ∈ X∗ : 〈x∗, x〉 ≤ 0 for all v ∈ TS(x).
Proposition A.2 Let X = X1 ×X2, where X1, X2 are Banach spaces,and let x = (x1, x2) ∈ S1 × S2, where S1, S2 are subsets of X1, X2,respectively. Then
TS1×S2(x) = TS1(x1)× TS2(x2);
NS1×S2(x) = NS1(x1)×NS2(x2).

B
Function spaces
All the effects of Nature areonly the mathematicalconsequences of a smallnumber of immutable laws.
Pierre-Simon Laplace(1749–1827)
In this part we recall some basic facts on Lebesgue and Sobolev spaces.A central place is dedicated to the main theorems in these basic functionspaces.
B.1 Lebesgue spaces
Let Ω ⊂ RN be an open set. We recall that the Lebesgue spaces aredefined by
Lp(Ω) :=
u : Ω→R; u is measurable and∫
Ω
|u(x)|p dx < ∞
if 1 ≤ p < ∞, and
L∞(Ω) := u : Ω→R; u is measurable and ess supx∈Ω |u(x)| < ∞ .
For any 1 ≤ p ≤ ∞ we define the space
Lploc(Ω) := u : Ω→R; u ∈ Lp(ω) for each ω ⊂⊂ Ω .
We have used in this volume the following basic results on Lebesguespaces.
358

B.2 Sobolev spaces 359
Theorem B.1 (Fatou’s Lemma). Assume that for any n ≥ 1, un ∈L1(Ω) and un ≥ 0 a.e. on Ω. Then
∫
Ω
lim infn→∞
un dx ≤ lim infn→∞
∫
Ω
un dx .
The next theorem is due to Brezis and Lieb [48] provides us with acorrection term that changes Fatou’s lemma from an inequality to anequality.
Theorem B.2 (Brezis–Lieb Lemma). Let (un) be a sequence of func-tions defined on Ω that converges pointwise a.e. to a function u. Assumethat for some 1 ≤ p < ∞, there exists a positive constant C such thatfor all x ∈ Ω,
supn≥1
∫
Ω
|un(x)|p dx < C .
Then
limn→∞
∫
Ω
[|un(x)|p − |un(x)− u(x)|p] dx =∫
Ω
|u(x)|p dx .
Theorem B.3 (Lebesgue’s Dominated Convergence Theorem). Assumethat for any n ≥ 1, un ∈ L1(Ω). Suppose that un→u a.e. on Ω and|un| ≤ v a.e., for some function v ∈ L1(Ω). Then
limn→∞
∫
Ω
un(x) dx =∫
Ω
u(x) dx .
B.2 Sobolev spaces
Let u ∈ L1loc(Ω) be a function. A function vα ∈ L1
loc(Ω) such that∫
Ω
u(x)Dαϕ(x)dx = (−1)|α|∫
Ω
vα(x)ϕ(x)dx
for any ϕ ∈ C∞0 (Ω) is called the weak distributional derivative of u andis denoted by Dαu. Here α = (α1, ..., αn), where αi (i = 1, ..., N) are
nonnegative integers and Dαu = ∂|α|∂xα1
1 . . . ∂xαN
N, with |α| = α1+...+αN .
It is clear that if such a vα exists, it is unique up to sets of measure zero.To define a Sobolev space we introduce a functional || · ||m,p, where m

360 Function spaces
is a nonnegative integer and 1 ≤ p ≤ ∞, as follows
||u||m,p =
∑
0≤|α|≤m
∫
Ω
|Dαu(x)|pdx
1/p
,
for 1 ≤ p < ∞ and
||u||m,∞ = max0≤|α|≤m
supΩ|Dαu(x)|
if p = ∞. It is obvious that || · ||m,p and || · ||m,∞ define norms on anyvector space of functions for which values of these functionals are finite,provided functions are identified in the space if they are equal almosteverywhere.
For any integer m ≥ 1 and any 1 ≤ p ≤ ∞ we can define the followingspaces
Hm,p(Ω) = the completion of u ∈ Cm(Ω) : ||um,p|| < ∞with respect the norm || · ||m,p;
Wm,p(Ω) = u ∈ Lp(Ω) : Dαu ∈ Lp(Ω) for 0 ≤ |α| ≤ m,where Dα denotes the weak partial derivative of u;
Wm,p0 (Ω) = the closure of C∞0 (Ω) in the space Wm,p(Ω).
The above spaces equipped with the norms || · ||m,p are called Sobolevspaces over Ω.
It is clear that W 0,p = W 0.p0 = Lp. It is also known that Hm,p(Ω) =
W 1,p(Ω) for every domain Ω ⊂ RN . The spaces Wm,p(Ω) and Wm,p0 (Ω)
are Banach spaces and these spaces are reflexive if and only if 1 < p < ∞.Moreover, W k,2(Ω) and W k,2
0 (Ω) are Hilbert spaces with scalar product
〈u, v〉 =∑
|α|≤k
∫
Ω
Dαu(x)Dαv(x)dx,
where D0u = u. Also, Wm,p(Ω) and Wm,p0 (Ω) are separable for 1 ≤ p <
∞. For any 1 ≤ p < ∞ we denote p′ = p/(p− 1) (if p = 1, p′ = ∞) andwe denote by W−m,p′(Ω) the dual space of Wm,p
0 (Ω) and we write
W−m,p′(Ω) = (Wm,p(Ω))?.
Then every element T ∈ W−m,p′(Ω) has the form
T (u) =∑
|α|≤k
∫
Ω
Dαu(x)vα(x)dx,

B.3 Compact embedding results 361
where vα are suitable elements in Lp′(Ω).B.3 Compact embedding results
Let (X, || · ||X), (Y, || · ||Y ) be Banach spaces. We say that X is continu-ously embedded into Y if there exists an injective linear map i : X → Y
and a constant C such that ||i(x)||Y ≤ C||x||X for all x ∈ X. We iden-tify X with the image i(X). We say that X is compactly embeddedinto Y if i is a compact map, that is, i maps bounded subsets of X intorelatively compact subset of Y .
The following theorem has a particular importance in the variationaland qualitative analysis of differential and partial differential equations,due to the control over the nonlinear terms.
Theorem B.4 (Sobolev embedding theorem) Suppose that Ω ⊂ RN isa bounded domain with Lipschitz boundary. Then
(i) If kp < N , then W k,p(Ω) is continuously embedded into Lq(Ω) for
each 1 ≤ q ≤ NpN − kp
; this embedding is compact, if q <Np
N − kp.
(ii) If 0 ≤ m < k − Np < m + 1, then W k,p(Ω) is continuously
embedded into Cm,α(Ω), for 0 ≤ α ≤ k−m− mp , this embedding
is compact if α < k −m− mp .
Let Cm,β(Ω) denote the set of all functions u belonging to Cm(Ω)and whose partial derivatives Dαu, with |α| = m, are Holder continuouswith exponent 0 < β < 1.
For a bounded domain Ω, Cm,β(Ω) becomes a Banach space with anorm
||u||Cm,β =∑
|α|≤m
‖Dαu‖∞ +∑
|α|=m
supx 6=y∈Ω
|Dαu(x)−Dαu(y)||x− y|β .
For an arbitrary domain Ω ⊂ RN and u ∈ W k,p0 (Ω) we have
K‖u‖pp? ≤
∑
|α|=k
∫
Ω
|Dαu(x)|pdx, (B.1)
where p? = NpN − kp
and K = K(k, n, p) is the best Sobolev constant.
This inequality says that W k,po is continuously embedded in Lp?
(Ω).If u ∈ W k,p(RN ), then the best Sobolev constant S is given by

362 Function spaces
K(k, n, p) = π−12 N− 1
p
(p− 1N − p
)1− 1p
Γ(1 +N
2)Γ(N)
Γ(N
p)Γ(1 + N − N
p)
1N
,
where Γ( · ) denotes Euler’s Gamma function. Moreover, the equalityholds in (B.1) if and only if u has the form
u(x) =[a + b|x| p
p−1
]1−Np
, (B.2)
where a and b are positive constants.If k = 1, p = 2, then the sharp constant will be denoted by Kn and
we have
Kn =
√4
n(n− 2)ω2nn
, (B.3)
where ωn is the volume of the unit sphere.We denote by Dk,p(RN ) completion of C∞0 (RN ) with respect to the
norm
‖u‖pDk,p =
∑
|α|=k
∫
Ω
|Dαu(x)|pdx .
According to the inequality (B.1), the function space Dk,p(RN ) iscontinuously embedded in Lp?
(RN ).Let Ω be an unbounded domain in RN with smooth boundary ∂Ω and
let G be a subgroup of O(N) whose elements leave Ω invariant, that is,g(Ω) = Ω for all g ∈ G. We assume that Ω is compatible with G, thatis, for some r > 0
m(y, r,G) →∞, as dist(y, Ω) ≤ r, |y| → ∞ (B.4)
where
m(y, r,G) = sup
n ∈ N :∃ g1, g2, ..., gn ∈ Gs.t.B(gjy, r) ∩B(gky, r) = ∅ if j 6= k
.
Let X = W 1,p0 (Ω) and define a representation of G over X as follows:
(π(g)u)(x) = u(g−1x), g ∈ G, u ∈ X x ∈ Ω.
As usual we shall write gu in place of π(g)u.

B.3 Compact embedding results 363
A function u defined on Ω is said to be G-invariant if
u(gx) = u(x), ∀ g ∈ G, a.e. x ∈ Ω.
Then u ∈ X is G-invariant if and only if
u ∈ XG = W 1,p0,G(Ω) := u ∈ X : gu = u, ∀ g ∈ G .
On X we take the norm
‖u‖ =∫
Ω
(|∇u|p + |u|p)1/p
.
The next result is essentially given by Willem [292] and in this form wasproved by Kobayashi-Otani [158].
Theorem B.5 If Ω is compatible with G, then the embeddings
XG = W 1,p0,G(Ω) → Lq(Ω), p < q < p? =
Np
N − p
are compact.
Now, we consider the space
H1(RN ) :=
u ∈ L2(RN ) : ∇u ∈ L2(RN )
with the inner product
〈u, v〉 =∫
RN
[∇u∇v + uv].
The space (H1(RN ), 〈·, ·〉) becomes a Hilbert space.Let G be a subgroup of O(N). We define
H1G(RN ) = u ∈ H1 : gu = u, ∀ g ∈ G,
where gu(x) := u(g−1x).The following result establishes a compact embedding in the case of
lack of compactness.
Theorem B.6 (Lions [190]) Let Nj ≥ 2, j = 1, ..., k,
k∑
j=1
Nj = N and
G := O(N1)×O(N2)× ...×O(Nk).
Then the following embedding is compact:
H1G(RN ) → Lp(RN ), 2 < p < 2?.

364 Function spaces
In the following we consider Ω = Ω×RN , N −m ≥ 2, Ω ⊂ Rm(m ≥ 1)is open bounded and 1 ≤ p ≤ N . We consider the space W 1,p
0 (Ω)
with the norm ||u|| =(∫
Ω
|∇u|p) 1
p
. Let G be a subgroup of O(N)
defined by G = idm × O(N − m). The action of G on W 1,p0 (Ω) is
given by gu(x1, x2) = u(x1, g1x2) for every (x1, x2) ∈ Ω × RN−m andg = idm × g1 ∈ G. The subspace of invariant functions is defined by
W 1,p0,G = u ∈ X : gu = u, ∀g ∈ G.
The action of G on W 1,p0 (Ω) is isometric, that is
||gu|| = ||u||, ∀g ∈ G.
We have the following result.
Theorem B.7 (Lions [190]) If 2 ≤ p ≤ N , then the embedding
W 1,p0,G → Ls(Ω), p < s < p?
is compact.
We end this section with a result given by Esteban and Lions [108].For this we consider Ω ⊂ Rm a bounded open set Ω = Ω× R and let
H10 (Ω) = u ∈ L2(Ω) : ∇u ∈ L2(Ω), u = 0 on ∂Ω = ∂Ω× R.
We denote by K the cone of H10 (Ω) defined by
K = u ∈ H10 (ω × R) : u is nonnegative,
y 7→ u(x, y) is nonincreasing for x ∈ ω, y ≥ 0, andy 7→ u(x, y) is nondecreasing for x ∈ ω, y ≤ 0,
Theorem B.8 (Esteban and Lions [108]) The embeddings K → Lq(Ω)are compact for q ∈ (2, 2∗m), where 2∗m = 2(m+1)
m−1 if m > 1, and 2∗m = ∞if m = 1.
B.4 Sobolev spaces on Riemann manifolds
Let (M, g) be a Riemannian manifold of dimension n. For k an inte-ger and k an integer and u ∈ C∞(M),∇ku denotes the k-th covariant

B.4 Sobolev spaces on Riemann manifolds 365
derivative of u (with the convection ∇0u = u.) The component of ∇u
in the local coordinates (x1, · · · , xn) are given by
(∇2)ij =∂2u
∂xi∂xj− Γk
ij
∂u
∂xk.
By definition on has
|∇ku|2 = gi1j1 · · · gikjk(∇ku)i1···ik(∇ku)j1···jk
.
For k ∈ N and p ≥ 1 real, we denote by Cmk (M) the space of smooth
functions u ∈ C∞(M) such that |∇ju| ∈ Lp(M) for any j = 0, · · · , k.
Hence,
Cpk = u ∈ C∞(M) : ∀ j = 0, ..., k,
∫
M
|∇ju|pdv(g) < ∞
where, in local coordinates, dv(g) =√
det(gij)dx, and where dx standsfor the Lebesque’s volume element of Rn. If M is compact, on has thatCp
k(M) = C∞(M) for all k and p ≥ 1.
Definition B.1 The Sobolev space Hpk (M) is the completion of Cp
k(M)with respect the norm
||u||Hpk
=k∑
j=0
(∫
M
|∇ju|pdv(g)) 1
p
.
More precisely, one can look at Hpk (M) as the space of functions u ∈
Lp(M) which are limit in Lp(M) of a Cauchy sequence (um) ⊂ Ck, anddefine the norm ||u||Hp
kas above where |∇ju|, 0 ≤ j ≤ k, is now the
limit in Lp(M) of |∇jum|. These space are Banach space, and if p > 1,then Hp
k is reflexive. We note that, if M is compact, Hpk (M) does not
depend on the Riemannian metric. If p = 2, H2k(M) is a Hilbert space
when equipped with the equivalent norm
||u|| =√√√√
k∑
j=0
∫
M
|∇ju|2dv(g). (B.5)
The scalar product 〈·, ·〉 associated to || · || is defined by
〈u, v〉 =k∑
m=0
∫
M
(gi1j1 · · · gimjm(∇mu)i1...im(∇mv)j1...jm
)dv(g). (B.6)

366 Function spaces
We denote by Ck(M) the set of k times continuously differentiablefunctions, for which the norm
‖u‖Ck =n∑
i=1
supM|∇iu|
is finite. The Holder space Ck,α(M) is defined for 0 < α < 1 as the setof u ∈ Ck(M) for which the norm
‖u‖Ck,α = ‖u‖Ck + supx,y
|∇ku(x)−∇ku(y)||x− y|α
is finite, where the supremum is over all x 6= y such that y is containedin a normal neighborhood of x, and ∇ku(y) is taken to mean the tensorat x obtained by parallel transport along the radial geodesics from x toy.
As usual, C∞(M) and C∞0 (M) denote the spaces of smooth functionsand smooth compactly supported function on M respectively.
Definition B.2 The Sobolev spaceHp
k(M) is the closure of C∞0 (M) inHp
k (M).
If (M, g) is a complete Riemannian manifold, then for any p ≥ 1, we
haveHp
k(M) = Hpk (M).
We finish this section with the Sobolev embedding theorem and theRellich–Kondrachov result for compact manifold without and with bound-ary.
Theorem B.9 (Sobolev embedding theorems for compact manifolds) LetM be a compact Riemannian manifold of dimension n.
a) If 1r ≥ 1
p − kn , then the embedding Hp
k (M) → Lr(M) is continu-ous.
b) (Rellich-Kondrachov theorem) Suppose that the inequality in a) is strict, then the embedding Hp
k (M) → Lr(M) is compact.c) Suppose 0 < α < 1 and 1
p ≤ k−αn , then the embedding Hp
k (M) →Cα(M) is continuous.
Theorem B.10 Let (M, g) be a compact n-dimensional Riemannianmanifold with boundary ∂M .
a) The embedding Hp1 (M) → Lq(M) is continuous, if p ≤ q ≤ np
n−p
and compact for p ≤ q < npn−p .

B.4 Sobolev spaces on Riemann manifolds 367
b) If ∂M 6= ∅, then the embedding Hp1 (M) → Lq(∂M) is continuous,
if p ≤ q ≤ p(n−1)n−p and compact for p ≤ q < p(n−1)
n−p .
Theorem B.11 For any smooth compact Riemannian manifold (M, g)of dimension n ≥ 3, there exists B > 0 such that for any u ∈ H2
1 (M),(∫
M
|u|2?
dvg
)2/2?
≤ K2n
∫
M
|∇u|2dvg + B
∫
M
u2dvg (B.7)
and the inequality is sharp.
Theorem B.12 (Global elliptic regularity) Let M be a compact Riemannmanifold, and suppose that u ∈ L1
loc(M) is a weak solution to ∆gu = f .
a) If f ∈ Hpk (M), then u ∈ Hp
k+2(M), and
‖u‖Hpk+2
≤ C(‖∆gu‖Hpk
+ ‖u‖Lp).
b) If f ∈ Ck,α(M), then f ∈ Ck+2,α(M), and
‖u‖Cpk+2
≤ C(‖∆gu‖Cpk
+ ‖u‖Cα).

C
Category and genus
Every human activity, good orbad, except mathematics,must come to an end.
Paul Erdos (1913–1996)
Topological tools play a central role in the study of variational prob-lems. Though this approach was foreshadowed in the works of H. Poin-care and G. Birkhoff, the force of these ideas was realized in the firstdecades of the 20th century, in the pioneering works of Ljusternik andSchnirelmann [194] and Morse [215, 216]. In this section we recall thenotions of Ljusternik-Schnirelmann category and Krasnoselski genus aswell as some basic properties of them.
Definition C.1 Let M be a topological space and A ⊂ M a subset.The continuous map η : A× [0, 1] → M is called a deformation of A inM if η(u, 0) = u for every u ∈ A. The set A is said be contractible inM if there exists a deformation η : A × [0, 1] → M with η(A, 1) = pfor some p ∈ M .
Definition C.2 Let M be a topological space. A set A ⊂ M is said to beof Ljusternik-Schnirelmann category k in M (denoted catM (A) = k) ifit can be covered by k but not by k−1 closed sets which are contractibleto a point in M . If such k does not exist, then catM (A) = +∞. Wedefine cat(M) = catM (M).
The Ljusternik-Schnirelmann category has the following basic prop-erties.
368

Category and genus 369
Proposition C.1 If A and B are subsets of the topological space M ,then the following properties hold true.
(a) If A ⊆ B, then catM (A) ≤ catM (B);(b) catM (A ∪B) ≤ catM (A) + catM (B).(c) If A is closed in X and η : A× [0, 1] → M a deformation of A in
X, then catM (A) ≤ catM (η(A, 1)).(d) If M is an ANR (in particular, it is a Banach-Finsler manifold
of class C1) and A ⊂ M , then there exist a neighborhood of A inM , such that catM (U) = catM (A).
Theorem C.1 [109] Let M be a non-contractible topological space andlet Ω(M) denote the space of based loops in M . Then cat(Ω(M)) = ∞.
Definition C.1 Let M be an arcwise connected topological space. Thencuplong(M) is the greatest non-vanishing iterated cup-product of singu-lar cocycles of M such that each component is of dimension greater thanzero.
Theorem C.2 [268] If M is an arcwise connected metric space, thencat(M) ≥ cuplong(M) + 1.
Theorem C.3 [269] Let M be a compact, connected, simply connectedand non-contractible Riemannian manifold. If Ω(M) denotes the spaceof the free loops on M , then cuplong(Ω) = ∞.
Let X be a real Banach space and denote
A = A ⊂ X \ 0 : A = −A, A is closed.
Definition C.3 We say that the positive integer k is the Krasnoselskigenus of A ∈ A, if there exists an odd map ϕ ∈ C(A,Rk \ 0) andk is the smallest integer with this property. The genus of the set A isdenoted by γ(A) = k. When there does not exist a finite such k, setγ(A) = ∞. Finally, set γ(∅) = 0.
Example C.1 Suppose A ⊂ X \ 0 is closed and A ∩ (−A) = ∅. LetA = A ∪ (−A). Then γ(A) = 1 since the function ϕ(x) = 1 for x ∈ A
and ϕ(x) = −1 for x ∈ −A is odd and lies in C(A,R \ 0).For A ∈ A and δ > 0 we denote by Nδ(A) the uniform δ-neighborhood
of A, that is, Nδ(A) = x ∈ X : distA(x) ≤ δ.

370 Category and genus
Proposition C.2 Let A, B ∈ A. Then the following properties holdtrue.
1 Normalization: If x 6= 0, γ(x ∪ −x) = 1;2 Mapping property: If there exists an odd map f ∈ C(A, B), then
γ(A) ≤ γ(B);3 Monotonicity property: If A ⊂ B, then γ(A) ≤ γ(B);4 Subadditivity: γ(A ∪B) ≤ γ(A) + γ(B);5 Continuity property: If A is compact then γ(A) < ∞ and there
is δ > 0 such that Nδ(A) ∈ A. In such a case, γ(Nδ(A)) = γ(A).
Example C.2 (a) If Sk−1 is the (k− 1)-dimensional unit sphere in Rk,
k ∈ N, then γ(Sk−1) = k.(b) If S is the unit sphere in an infinite dimensional and separable
Banach space, then γ(S) = +∞.

D
Clarke and Degiovanni gradients
Profound study of nature isthe most fertile source ofmathematical discoveries.
Baron Jean Baptiste JosephFourier (1768–1830)
In many time independent problems arising in applications, the so-lutions of a given problem are critical points of an appropriate energyfunctional f , which is usually supposed to be real and of class C1 (oreven differentiable) on a real Banach space. One may ask what happensif f , which often is associated to the original equation in a canonicalway, fails to be C1 or differentiable. In this case the gradient of f
must be replaced by a generalized one, in a sense which is describedin this Appendix, either for locally Lipschitz or for continuous/lowersemi-continuous functionals. In the latter case we use in the generalframework of metric spaces.
D.1 Locally Lipschitz functionals
Let X will denote a real Banach space. Let X∗ be its dual and, for everyx ∈ X and x∗ ∈ X∗, let 〈x∗, x〉 denote the duality pairing between X∗
and X.
Definition D.1 A functional f : X → R is said to be locally Lipschitzprovided that, for every x ∈ X, there exists a neighbourhood V of x anda positive constant k = k(V ) depending on V such that for all y, z ∈ V ,
|f(y)− f(z)| ≤ k ||y − z|| .
371

372 Clarke and Degiovanni gradients
Definition D.2 Let f : X → R be a locally Lipschitz functional andx, v ∈ X. We call the Clarke generalized directional derivative of f in x
with respect to the direction v the number
f0(x, v) = lim supy→xλ0
f(y + λv)− f(y)λ
.
If f is a locally Lipschitz functional, then f0(x, v) is a finite numberand
|f0(x, v)| ≤ k||v|| .Moreover, if x ∈ X is fixed, then the mapping v 7−→ f0(x, v) is positivehomogeneous and subadditive, so convex continuous. By the Hahn-Banach theorem, there exists a linear map x∗ : X → R such that forevery v ∈ X,
x∗(v) ≤ f0(x, v) .
Definition D.3 Let f : X → R be a locally Lipschitz functional andx ∈ X. The generalized gradient (Clarke subdifferential) of f at thepoint x is the nonempty subset ∂f(x) of X∗ which is defined by
∂f(x) = x∗ ∈ X∗; f0(x, v) ≥ 〈x∗, v〉, for all v ∈ X .
We also point out that if f is convex, then ∂f(x) coincides with thesubdifferential of f in x in the sense of the convex analysis, that is,
∂f(x) = x∗ ∈ X∗; f(y)− f(x) ≥ 〈x∗, y − x〉, for all y ∈ X .
We list in what follows the main properties of the Clarke gradient ofa locally Lipschitz functional. We refer to [71], [72] for further detailsand proofs.
a) For every x ∈ X, ∂f(x) is a convex and σ(X∗, X)-compact set.b) For every x, v ∈ X the following holds
f0(x, v) = max〈x∗, v〉; x∗ ∈ ∂f(x) .
c) The multivalued mapping x 7−→ ∂f(x) is upper semicontinuous, inthe sense that for every x0 ∈ X, ε > 0 and v ∈ X, there exists δ > 0such that, for any x∗ ∈ ∂f(x) satisfying ||x − x0|| < δ, there is somex∗0 ∈ ∂f(x0) satisfying |〈x∗ − x∗0, v〉| < ε.
d) The functional f0(·, ·) is upper semi-continuous.e) If x is an extremum point of f , then 0 ∈ ∂f(x).

D.2 Continuous or lower semi-continuous functionals 373
f) The mapping
λ(x) = minx∗∈∂f(x)
||x∗||
exists and is lower semicontinuous.g) ∂(−f)(x) = −∂f(x).h) Lebourg’s mean value theorem: if x and y are two distinct point
in X then there exists a point z situated in the open segment joining x
and y such that
f(y)− f(x) ∈ 〈∂f(z), y − x〉i) If f has a Gateaux derivative f ′ which is continuous in a neighbour-
hood of x, then ∂f(x) = f ′(x). If X is finite dimensional, then ∂f(x)reduces at one point if and only if f is Frechet-differentiable at x.
Definition D.4 A point x ∈ X is said to be a critical point of thelocally Lipschitz functional f : X → R if 0 ∈ ∂f(x), that is f0(x, v) ≥ 0,for every v ∈ X. A number c is a critical value of f provided that thereexists a critical point x ∈ X such that f(x) = c.
We remark that a minimum point is also a critical point. Indeed, if x
is a local minimum point, then for every v ∈ X,
0 ≤ lim supλ0
f(x + λv)− f(x)λ
≤ f0(x, v) .
Definition D.5 If f : X → R is a locally Lipschitz functional andc is a real number, we say that f satisfies the Palais-Smale conditionat the level c (in short, (PS)c) if any sequence (xn) in X satisfyingf(xn) −→ c and λ(xn) −→ 0, contains a convergent subsequence. Themapping f satisfies the Palais-Smale condition (in short, (PS)) if everysequence (xn) which satisfies (f(xn)) is bounded and λ(xn) −→ 0, hasa convergent subsequence.
D.2 Continuous or lower semi-continuous functionals
We are now interested in the main properties of the corresponding prop-erties in the case where f is a continuous or even a lower semi-continuousfunctional defined on a metric space.
Definition D.6 Let (X, d) be a metric space and let f : X → R bea continuous function. Let u ∈ X be a fixed element. We denote by

374 Clarke and Degiovanni gradients
|df |(u) the supremum of the σ ∈ [0,∞[ such that there exist δ > 0 anda continuous map H : B(u, δ)× [0, δ] → X such that for all v ∈ B(u, δ)and t ∈ [0, δ] we have
a) d(H(v, t), v) ≤ t;b) f(H(v, t)) ≤ f(v)− σt.
The extended real number |df |(u) is called the weak slope of f at u.
Definition D.7 Let (X, d) be a metric space and f : X → R be acontinuous function. A point u ∈ X is said to be a critical point of f if|df |(u) = 0.
Definition D.8 Let (X, d) be a metric space. A continuous functionf : X → R satisfies the Palais-Smale condition at level c ∈ R (shortly,(PS)c-condition) if every sequence un ⊂ X such that limn→∞ f(un) =c and limn→∞ |df |(un) = 0, possesses a convergent subsequence.
For every c ∈ R we set
Kc = u ∈ X : |df |(u) = 0, f(u) = c;
f c = u ∈ X : f(u) ≤ c.
Remark D.1 Note that |df |(u) = ‖f ′(u)‖ whenever X is a Finslermanifold of class C1 and f is of class C1, see [83]. In particular, whenX is a Banach space, Definition D.8 reduces to Definition 1.1 (a).
Theorem D.1 [Deformation lemma; [74, Theorem 2.3]] Let (X, d) be acomplete metric space and let f : X → R be a continuous function, andc ∈ R. Assume that f satisfies the (PS)c-condition. Then, given ε > 0,O a neighborhood of Kc (if Kc = ∅, we choose O = ∅) and λ > 0, thereexist ε > 0 and a continuous map η : X × [0, 1] → X such that
(i) d(η(u, t), u)) ≤ λt for all u ∈ Xand t ∈ [0, 1];(ii) f(η(u, t)) ≤ f(u) for all u ∈ Xand t ∈ [0, 1];(iii) η(u, t) = u for all u /∈ f−1(]c− ε, c + ε[) and t ∈ [0, 1];iv) η(f c+ε \ O, 1) ⊆ f c−ε.
These notions can be extended to arbitrary functions defined on ametric space (X, d). Let f : X → R be a function. We denote by Br(u)the open ball of center u and radius r and we set
epi (f) = (u, λ) ∈ X × R : f(u) ≤ λ .

D.2 Continuous or lower semi-continuous functionals 375
In the following, X × R will be endowed with the metric
d ((u, λ), (v, µ)) =(d(u, v)2 + (λ− µ)2
)1/2
and epi (f) with the induced metric.
Definition D.9 For every u ∈ X with f(u) ∈ R, we denote by |df |(u)the supremum of the σ’s in [0,+∞[ such that there exist δ > 0 and acontinuous map
H : (Bδ(u, f(u)) ∩ epi (f))× [0, δ] → X
satisfying
d(H((w, µ), t), w) ≤ t , f(H((w, µ), t)) ≤ µ− σt ,
whenever (w, µ) ∈ Bδ(u, f(u)) ∩ epi (f) and t ∈ [0, δ].The extended real number |df |(u) is called the weak slope of f at u.
Define a function Gf : epi (f) → R by Gf (u, λ) = λ. Of course, Gf isLipschitz continuous of constant 1.
Proposition D.1 For every u ∈ X with f(u) ∈ R, we have f(u) =Gf (u, f(u)) and
|df |(u) =
|dGf |(u, f(u))√1− |dGf |(u, f(u))2
if |dGf |(u, f(u)) < 1 ,
+∞ if |dGf |(u, f(u)) = 1 .
We refer to [59, Proposition 2.3] for a complete proof of this result.The previous proposition allows us to reduce, at some extent, the
study of the general function f to that of the continuous function Gf .Moreover, if f is continuous then Definition D.9 reduces to DefinitionD.6.
Two important notions which are very well related to the notion ofweak slope are those of generalized directional derivative and generalizedgradient in the sense of Degiovanni. For every u ∈ X with f(u) ∈ R,v ∈ X and ε > 0, let f0
ε (u; v) be the infimum of r ∈ R such that thereare δ > 0 and a continuous map
V : (Bδ(u, f(u)) ∩ epi (f))× (0, δ]→Bε(v)
satisfying
f(w + tV((w, µ), t) ≤ µ + rt ,

376 Clarke and Degiovanni gradients
whenever (w, µ) ∈ Bδ(u, f(u)) ∩ epi (f) and t ∈ (0, δ]. Under theseassumptions, we define the generalized directional derivative of f at u
with respect to v by
f0(u; v) := supε>0
f0ε (u; v) .
We also define the generalized gradient of f at u by
∂f(u) := ϕ ∈ X∗; f0(u; v) ≥ ϕ(v) for every v ∈ X .
Theorem D.2 If u ∈ X and f(u) ∈ R, the following facts hold:
(a) |df |(u) < +∞ ⇐⇒ ∂f(u) 6= ∅;(b) |df |(u) < +∞ =⇒ ∂f(u) ≥ min ‖u∗‖ : u∗ ∈ ∂f(u).
We point out that f0(u; v) is greater or equal than the directionalderivative in the sense of Clarke-Rockafellar, hence ∂f(u) contains thesubdifferential of f at u in the sense of Clarke. However, if f : X → Ris locally Lipschitz, these notions agree with those of Clarke. Thus, insuch a case, f0(u; · ) is also Lipschitz continuous and we have for allu, v ∈ X,
f0(u; v) = lim supz→u, w→v
t→0+
f(z + tw)− f(z)t
, (D.1)
(u, v) 7→ f0(u; v)
is upper semicontinuous on X ×X . (D.2)
By means of the weak slope, we can now introduce the two mainnotions of critical point theory.
Definition D.10 We say that u ∈ X is a (lower) critical point of f , iff(u) ∈ R and |df |(u) = 0. We say that c ∈ R is a (lower) critical valueof f , if there exists a (lower) critical point u ∈ X of f with f(u) = c.
Definition D.11 Let c ∈ R. A sequence (un) in X is said to be aPalais-Smale sequence at level c ( (PS)c−sequence, for short) for f , iff(un) → c and |df |(un) → 0.
We say that f satisfies the Palais-Smale condition at level c ((PS)c,for short), if every (PS)c−sequence (un) for f admits a convergent sub-sequence (unk
) in X.

D.2 Continuous or lower semi-continuous functionals 377
The main feature of the weak slope is that it allows to prove naturalextensions of the classical critical point theory for general continuousfunctions defined on complete metric spaces. Moreover, one can try toreduce the study of a lower semicontinuous function f to that of thecontinuous function Gf . Actually, Proposition D.1 suggests to exploitthe bijective correspondence between the set where f is finite and thegraph of f .
Assuming that (X, d) is a metric space and f : X→R is continuous,for any a ∈ R := R ∪ −∞,+∞ we set
fa := u ∈ X; f(u) ≤ a .
Definition D.12 Let a, b ∈ R with a ≤ b. The pair (f b, fa) is said tobe trivial if for every neighborhoods [α′, α′′] of a and [β′, β′′] of b in R,there exists a continuous function H : fβ′ × [0, 1]→fβ′′ such that for allx ∈ fβ′ , H(x, 0) = x, H(fβ′ × 1) ⊂ fα′′ , and H(fα′ × [0, 1]) ⊂ fα′′ .
Definition D.13 A real number c is said to be an essential value of f
if for every ε > 0 there exist a, b ∈ (c − ε, c + ε) with a < b such thatthe pair (f b, fa) is not trivial.
Example D.1 Let f : R2→R defined by f(x, y) = ex − y2. Then 0 isan essential value of f , but not a critical value of f . On the other hand,condition (PS)0 is not satisfied for f
Definition D.14 Let X be a normed space and f : X → R an evenfunction with f(0) < +∞. For every (0, λ) ∈ epi (f) we denote by|dZ2Gf |(0, λ) the supremum of the σ’s in [0, +∞) such that there existδ > 0 and a continuous map
H = (H1,H2) : (Bδ(0, λ) ∩ epi (f))× [0, δ] → epi (f)
satisfying
d (H((w, µ), t), (w, µ)) ≤ t , H2((w, µ), t) ≤ µ− σt ,
H1((−w, µ), t) = −H1((w, µ), t) ,
whenever (w, µ) ∈ Bδ(0, λ) ∩ epi (f) and t ∈ [0, δ].
The following result is the saddle point theorem for nondifferentiablefunctions.

378 Clarke and Degiovanni gradients
Theorem D.3 Let X be a Banach space and assume that f : X →R∪+∞ is an even lower semicontinuous function. Assume that thereexists a strictly increasing sequence (Vh) of finite-dimensional subspacesof X with the following properties:
(a) there exist a closed subspace Z of X, % > 0 and α > f(0) suchthat X = V0 ⊕ Z and
∀u ∈ Z : ‖u‖ = % =⇒ f(u) ≥ α ;
(b) there exists a sequence (Rh) in ]%, +∞[ such that
∀u ∈ Vh : ‖u‖ ≥ Rh =⇒ f(u) ≤ f(0) ;
(c) for every c ≥ α, the function f satisfies (PS)c and (epi)c;(d) we have |dZ2Gf |(0, λ) 6= 0 whenever λ ≥ α.
Then there exists a sequence (uh) of critical points of f with f(uh) →+∞.

E
Elements of set–valued analysis
To myself I am only a childplaying on the beach, whilevast oceans of truth lieundiscovered before me.
Sir Isaac Newton (1642–1727)
Let X and Y be metric spaces, and let F : X Ã Y be a set-valuedmap with nonempty values.
Definition E.1 (i) F : X Ã Y is upper semi-continuous at u ∈ X (uscat u) if for any neighborhood U of F (u) there exists η > 0 such that forevery u′ ∈ BX(u, η) we have F (u′) ⊆ U .
(ii) F : X Ã Y is lower semi-continuous at u ∈ X (lsc at u) if for anyy ∈ F (u) and for any sequence of elements un in X converging to u
there exists a sequence yn converging to y and yn ∈ F (un).(iii) F : X Ã Y is upper (resp. lower) semi-continuous on X if F is
upper (resp. lower) semi-continuous at every point u ∈ X.(iv) F : X Ã Y is continuous at u ∈ X if it is both upper semi-
continuous and lower semi-continuous at u, and that it is continuous onX if and only if it is continuous at every point of X.
Let M be a subset of Y . We set
F−1(M) = x ∈ X : F (u) ∩M 6= ∅;
F+1(M) = x ∈ X : F (u) ⊆ M.The subset F−1(M) is called the inverse image of M by F and F+1(M)is called the core of M by F . The following characterization of the upper(resp. lower) semicontinuity of F on X can be given.
379

380 Elements of set–valued analysis
Proposition E.1 Let X and Y be metric spaces. A set-valued mapF : X Ã Y with nonempty values is upper semicontinuous on X if andonly if the inverse image of any closed subset M ⊆ Y is closed, and it islower semicontinuous on X if and only if the core of any closed subsetM ⊆ Y is closed.
Let X and Y be vector spaces, let F : X Ã Y be a set-valued map,and let K be a convex subset of X.
Definition E.2 (i) F is a process if λF (u) = F (λu) for all u ∈ X,λ > 0, and 0 ∈ F (0).
(ii) We say that F is convex on K if
λF (x1) + (1− λ)F (x2) ⊆ F (λx1 + (1− λ)x2)
for all x1, x2 ∈ K and all λ ∈ [0, 1].
Let X be a normed space, K be a subset of X, and let u ∈ K, whereK is the closure of K. The contingent cone TK(u) is defined by
TK(u) = v ∈ X : lim inft→0+
dist(u + tv,K)t
= 0.
In particular, if K is convex, then K ⊆ u + TK(u).Let F : X Ã R be a set-valued map with nonempty compact values.
Definition E.3 (i) We say that F is Lipschitz around u ∈ X if thereexist a positive constant L and a neighborhood U of u such that
F (u1) ⊆ F (u2) + L‖u1 − u2‖ · [−1, 1] for all u1, u2 ∈ U.
(ii) Let K ⊆ X. F is K-locally Lipschitz if it is Lipschitz around allu ∈ K.
Proposition E.2 Let X be a normed space. If F : X Ã R is K-locallyLipschitz, then the restriction F |K : K Ã R is continuous on K.
Definition E.4 The contingent derivative DF (u, c) of F : X Ã R at(u, c) ∈ GraphF is the set-valued map from X to R defined by
Graph(DF (u, c)) = TGraphF (u, c), (E.1)
where TGraphF (u, c) is the contingent cone at (u, c) to the GraphF .

Elements of set–valued analysis 381
We can characterize the contingent derivative by a limit of a differ-ential quotient. Let (u, c) ∈ GraphF and suppose that F is Lipschitzaround u. We have
v ∈ DF (u, c)(h) ⇐⇒ lim inft→0+
dist(v,F (u + th)− c
t) = 0 (E.2)
(see Aubin and Frankowska [16, Proposition 5.1.4, p.186]). If we intro-duce the Kuratowski upper limit
Limsupu′→uF (u′) =
c ∈ R : lim infu′→u
dist(c, F (u′)) = 0
,
then (E.2) can be written in the following form:
DF (u, c)(h) = Limsupt→0+F (u + th)− c
t.
Remark E.1 Let us consider the case when F is single-valued, thatis, F (u) = f(u) for all u ∈ X. Suppose that f : X → R is continu-ously differentiable. From Aubin and Frankowska [16, Proposition 5.1.3,p.184], we have that
DF (u, f(u))(h) = f ′(u)(h) for all h ∈ X. (E.3)
Definition E.5 (i) We say that F : X Ã R is sleek at (u, c) ∈ GraphFif the map
GraphF 3 (u ′, c′) Ã Graph (DF (u ′, c′))
is lower semicontinuous at (u, c). F is said to be sleek if it is sleek atevery point (u, c) ∈ GraphF .
(ii) F : X Ã R is lower semicontinuously differentiable if the map
(u, c, h) ∈ GraphF ×X Ã DF (u, c)(h)
is lower semicontinuous.
The lower semicontinuous differentiability of a set-valued may clearlyimplies its sleekness.
Remark E.2 If F : X Ã R is a set-valued map with nonempty compactvalues and closed graph, and it is sleek at (u, c) ∈ GraphF , then its con-tingent derivative at (u, c) is a closed convex process (see [16, Theorem4.1.8, p.130]).

Bibliography
[1] Abbondandolo, A. and Figalli, A. (2007). High action orbits for Tonelli La-grangians and superlinear Hamiltonians on compact configuration spaces,J. Differential Equations 234, 626–653.
Akagi, G., Kobayashi, J., and Otani, M. (2003). Principle of symmetric criti-cality and evolution equations, Dynamical systems and differential equa-tions (Wilmington, NC, 2002), Discrete Contin. Dyn. Syst., suppl., 1–10.
Alama, S. and Tarantello, G. (1993). On semilinear elliptic equations withindefinite nonlinearities, Calc. Var. Partial Differential Equations 1, 439–475.
Alama, S. and Tarantello, G. (1996). Elliptic problems with nonlinearitiesindefinite in sign, J. Funct. Anal. 141, 159–215.
Allegretto, W. and Huang, Y.X. (1995). Eigenvalues of the indefinite weightp-Laplacian in weighted RN spaces, Funkc. Ekvac. 38, 233–242.
Ambrosetti, A., Brezis, H., and Cerami, G. (1994). Combined effects of con-cave and convex nonlinearities in some elliptic problems, J. Funct. Anal.122, 519–543.
Ambrosetti, A. and Malchiodi, A. (2006). Perturbation Methods and Semilin-ear Elliptic Problems on Rn (Birkhauser Verlag, Basel).
Ambrosetti, A. and Rabinowitz, P. (1973). Dual variational methods in criticalpoint theory and applications, J. Funct. Anal. 14, 349–381.
Amick, C.J. (1984). Semilinear elliptic eigenvalue problems on an infinite stripwith an application to stratified fluids, Ann. Scuola Norm. Sup. Pisa Cl.Sci. 11, 441–499.
Amick, C.J. and Toland, J.F. (1983). Nonlinear elliptic eigenvalue problems onan infinite strip-global theory of bifurcation and asymptotic bifurcation,Math. Ann. 262, 313–342.
Ammann, B., Dahl, M., and Humbert E. (2008). Smooth Yamabe invariantand surgery, arXiv:0804.1418v3.
Anane, A. (1987). Simplicite et isolation de la premiere valeur propre du p-laplacien, C.R. Acad. Sci. Paris, Ser. I Math. 305, 725–728.
Anello, G. and Cordaro, G. (2007). Perturbation from Dirichlet problem in-volving oscillating nonlinearities, J. Differential Equations 234, 80–90.
Aronsson, G. and Janfalk, U. (1992). On Hele-Shaw flow of power-law fluids,European J. Appl. Math. 3, 343–366.
Asplund, E. (1967). Averaged norms, Israel J. Math. 5, 227–233.
382

Bibliography 383
Asplund, E. (1968). Topics in the theory of convex functions, Proc. NATOInstitute Venise, Oderisi Gubio.
Aubin, J.-P. and Frankowska, H. (1990). Set-valued Analysis (Birkhauser,Boston).
Aubin, T. (1976). Equations differentielle non lineaires et probleme de Yamabeconcernant la courbure scalaire, J. Math. Pures Appl. 55, 269–296.
Aubin, T. (1982). Nonlinear Analysis on Manifold. Monge–Ampere Equations(Springer-Verlag, Heidelberg).
Aubin, T. (1998). Some Nonlinear Problems in Riemannian Geometry(Springer Verlag, Berlin).
Azagra, D. and Ferrera, J. (2005). Proximal calculus on Riemannian manifolds,Mediterr. J. Math. 2, 437–450.
Azagra, D., Ferrera, J., and Lopez-Mesas, J.F. (2005). Nonsmooth analysisand Hamilton-Jacobi equations on Riemannian manifolds, J. Funct. Anal.220, 304–361.
Bao, D., Chern, S.S., and Shen, Z. (2000). An Introduction to Riemann–Finsler Geometry, Graduate Texts in Mathematics, vol. 200 (SpringerVerlag, Berlin).
Barbu, V. (1976). Nonlinear Semigroups and Differential Equations in BanachSpaces (Noordhoof, Leyden).
Bartolo, P., Benci, V., and Fortunato, D. (1983). Abstract critical point the-orems and applications to some nonlinear problems with “strong” reso-nance at infinity, Nonlinear Analysis TMA 7, 981–1012.
Bartsch, T. (1993). Topological Methods for Variational Problems with Sym-metries (Springer Verlag, Berlin).
Bartsch, T. (1993). Infinitely many solutions of a symmetric Dirichlet prob-lems, Nonlinear Analisys TMA 20, 1205–1216.
Bartsch, T. and Figueiredo, D.G. de (1999). Infinitely many solutions of non-linear elliptic systems, Progr. Nonlinear Differential Equations Appl. 35,51–67.
Bartsch, T., Liu, Z., and Weth, T. (2004). Sign changing solutions of super-linear Schrodinger equations, Comm. Partial Differential Equations 29,25–42.
Bartsch, T., Pankov, A., and Wang, Z.-Q. (2001). Nonlinear Schrodinger equa-tions with steep potential well, Commun. Contemp. Math. 4, 549–569.
Bartsch, T., Schneider, M., and Weth, T. (2004). Multiple solutions of a crit-ical polyharmonic equation, J. Reine Angew. Math. 571, 131–143.
Bartsch, T. and Wang, Z.-Q. (1995). Existence and multiplicity results forsome superlinear elliptic problems in RN , Comm. Partial DifferentialEquations 20, 1725–1741.
Bartsch, T. and Willem, M. (1993). Infinitely many non-radial solutions of anEuclidian scalar field equation, J. Funct. Anal. 117, 447–460.
Bartsch, T. and Willem, M. (1993). Infinitely many radial solutions of a semi-linear problem in RN , Arch. Ration. Mech. Anal. 124, 261–276.
Benci, V., Fortunato, D., and Pisani, L. (1998). Solitons like solutions of aLorentz invariant equation in dimension 3, Rev. Math. Phys. 10, 315–344.
Berestycki, H., Cappuzzo Dolcetta, I., and Nirenberg, L. (1995). Variationalmethods for indefinite superlinear homogeneous elliptic problems, Non-linear Differential Equations Appl. (NoDEA) 2, 553–572.

384 Bibliography
Berestycki, H. and Lions, P.-L. (1983). Nonlinear scalar field equations I, II,Arch. Ration. Mech. Anal. 82, 313–345, 347–375.
Bessaga, C. and Pelczynski, A. (1975). Selected Topics in Infinite-DimensionalTopology (Polish Scientific Publishers, Warszawa).
Bhattacharya, T., DiBenedetto, E., and Manfredi, J. (1989). Limits as p →∞of ∆pup = f and related extremal problems, Rend. Sem. Mat. Univ. Pol.Torino, Fascicolo Speciale, 15–68.
Bidaut-Veron, M.-F. and Veron, L. (1991). Nonlinear elliptic equations oncompact Riemannian manifolds and asymptotics of Emden equations, In-vent. Math. 106, 489–539.
Bonanno, G. (2002). A minimax inequality and its applications to ordinarydifferential equations, J. Math. Anal. Appl. 270, 210–229.
Bonanno, G. (2003). Some remarks on a three critical points theorem, Non-linear Analysis, TMA 54, 651–665.
Borenshtein, O.Y. and Shul’man, V.S. (1991). A minimax theorem, Math.Notes 50, 752–754.
Borwein, J.M. (2007). Proximality and Chebyshev sets, Optim. Lett. 1, 21–32.Borwein, J.M. and Preiss, D. (1987). A smooth variational principle with appli-
cations to subdifferentiability and to differentiability of convex functions,Trans. Amer. Math. Soc. 303, 517–527.
Breckner, B. and Varga, Cs. Infinitely many solutions for a class of systemsof differential inclusions, preprint.
Brezis, H. (1983). Analyse Fonctionelle. Theorie et Applications (Masson,Paris).
Brezis, H. and Browder, F. (1998). Partial differential equations in the 20thcentury, Adv. Math. 135, 76–144.
Brezis, H. and Lieb, E.H. (1983). A relation between pointwise convergenceof functions and convergence of functionals, Proc. Amer. Math. Soc. 88,486–490.
Brezis, H. and Nirenberg, L. (1983). Positive solutions of nonlinear ellipticequations involving critical Sobolev exponents, Comm. Pure Appl. Math.,36, 437–477.
Brezis, H. and Nirenberg, L. (1991). Remarks on finding critical points, Comm.Pure Appl. Math. 64, 939–963.
Brezis, H. and Nirenberg, L. (1993). H1 versus C1 local minimizers, C.R.Acad. Sci. Paris, Ser. I Math. 317, 465–472.
Bridston, M. and Haefliger, A. (1999). Metric Spaces of Non-positive Curva-ture, (Springer Verlag, Berlin).
Burton, G.R. (1985). Semilinear elliptic equations on unbounded domains,Math. Z. 190, 519–525.
Busemann, H. (1955). The Geometry of Geodesics (Academic Press, NewYork).
Busemann, H. and Mayer, W. (1941). On the foundations of the calculus ofvariations, Trans. Amer. Math. Soc. 49, 173-198.
Caponio, Javaloyes and Masiello, ...Cammaroto, F., Chinnı, A., and Di Bella, B. (2006). Some multiplicity results
for quasilinear Neumann problems, Arch. Math. (Basel) 86, 154–162.Cammaroto, F., Chinnı, A., and Di Bella, B. (2007). Multiple solutions for a
quasilinear elliptic variational system on strip-like domains, Proc. Edinb.Math. Soc. 50, 597–603.
Campa, I. and Degiovanni, M. (2000). Subdifferential calculus and nonsmooth

Bibliography 385
critical point theory, SIAM J. Optim. 10, 1020–1048 .Carriao P.C. and Miyagaki, O. (2002). Existence of non-trivial solutions of
elliptic variational systems in unbounded domains, Nonlinear AnalysisTMA 51, 155–169.
Cartan, E. (1928). Lecons sur la Geometrie des Espaces de Riemann(Gauthiers–Villars, Paris).
Cavazzuti, E., Pappalardo, M., and and Passacantando, M. (2002). Nash equi-libria, variational inequalities, and dynamical systems, J. Optim. TheoryAppl. 114, 491–506.
Cerami, G. (1978). Un criterio di esistenza per i punti critici su varieta’ illim-itate, Rend. Sci. Mat. Fis. Chim. Geol. 112, 332–336.
Chabrowski, J. (1997). Elliptic variational problems with indefinite nonlinear-ities, Topol. Meth. Nonlin. Anal. 9, 221–231.
Chabrowski, J. (1997). Variational Methods for Potential Operator Equations(De Gruyter, Berlin–New York).
Chang, S.-Y. (2004). Maximal elements in noncompact spaces with applicationto equilibria, Proc. Amer. Math. Soc. 132, 535–541.
Cheney, W. (2001). Analysis for Applied Mathematics (Springer, New York).Cherrier, P. (1984). Probl‘emes de Neumann nonlineaires sur les varetes Rie-
manniennes, J. Funct. Anal. 57, 154–207.Choquet, G. (1969). Lectures on Analysis, Vol. I (Math. Lectures Notes Ser.,
New York-Amsterdam).Cırstea, F.-C. and Radulescu, V. (2001). On a class of quasilinear eigenvalue
problems on unbounded domains, Arch. Math. (Basel) 77, 337–346.Clarke, F.H. (1983). Nonsmooth Analysis (John Wiley & Sons, New York).Clarke, F.H. (1990). Optimization and Nonsmooth Analysis, Classics in Ap-
plied Mathematics, vol. 5 (Society for Industrial and Applied Mathemat-ics (SIAM), Philadelphia).
Conti, M., Merizzi, L., and Terracini, S. (2000). Radial solutions of superlinearequations on RN . A global variational approach, Arch. Ration. Mech.Anal. 153, 291–316.
Corvellec, J.-N., Degiovanni, M., and Marzocchi, M. (1993). Deformationproperties for continuous functionals and critical point theory, Topol.Methods Nonlinear Anal. 1, 151–171.
Costa, D.G. (1994). On a class of elliptic system in RN , Electronic J. Differ-ential Equations 111, 103–122.
Costa, D.G. and Magalhaes, C.A. (1996). A unified approach to a class ofstrongly indefinite functionals, J. Differential Equations 125, 521–548.
Coti Zelati, V. and Rabinowitz, P.H. (1992). Homoclinic type solutions for asemilinear elliptic PDE on Rn, Comm. Pure Appl. Math. 45, 1217–1269.
Cotsiolis, A. and Iliopoulos, D. (1991). Equations elliptiques non lineaires surSn. Le probleme de Nirenberg, C.R. Acad. Sci. Paris, Ser. I Math. 313,607–609.
Cotsiolis, A. and Iliopoulos, D. (1995). Equations elliptiques non lineaires acroissance de Sobolev sur-critique, Bull. Sci. Math. 119, 419–431.
Dautray, R. and Lions, J.-L. (1985). Mathematical Analysis and NumericalMethods for Science and Technology, vol. 1: Physical Origins and Clas-sical Methods (Springer Verlag, Berlin).
Degiovanni, M. and Lancelotti, S. (1995). Perturbations of even nonsmoothfunctionals, Differential Integral Equations 8, 981–992.

386 Bibliography
Degiovanni, M., Marino, A., and Tosques, M. (1985). Evolution equations withlack of convexity, Nonlinear Anal. 9, 1401–1443.
Degiovanni, M. and Marzocchi, M. (1994). A critical point theory for nons-mooth functionals, Ann. Mat. Pura Appl. 167, 73–100.
Degiovanni, M. and Schuricht, F. (1998). Buckling of nonlinearly elastic rodsin the presence of obstacles treated by nonsmooth critical point theory,Math. Ann. 311, 675–728.
Degiovanni, M. and Radulescu, V. (1999). Perturbation of nonsmooth sym-metric nonlinear eigenvalue problems, C.R. Acad. Sci. Paris Ser. I 329,281–286.
Di Falco, A.G. (2003). Infinitely many solutions to the Neumann problem forquasilinear elliptic systems, Matematiche (Catania) LVIII, 117–130.
Di Falco, A.G. (2003). Infinitely many solutions to the Neumann problem forquasilinear elliptic systems, Matematiche (Catania) LX, 163–179.
Diaz, J.-I. (1986). Nonlinear Partial Differential Equations and Free Bound-aries. Elliptic Equations, Research Notes in Mathematics, Vol. 106 (Pit-man, Boston-London-Melbourne).
Ding, W. (1986). On a conformally invariant elliptic equation on Rn, Comm.Math. Phys. 107, 331–335.
Dinu, T.-L. (2006). Entire solutions of Schrodinger elliptic systems with dis-continuous nonlinearity and sign-changing potential, Math. Modelling andAnalysis 11, 1–14.
Do Carmo, M.P. (1992). Riemannian Geometry (Birkhauser, Boston).
Drabek, P. (1995). Nonlinear eigenvalue problems for the p-Laplacian in RN ,Math. Nachr. 173, 131–139.
Drabek, P., Kufner, A., and Nicolosi, F. (1997). Quasilinear Elliptic Equa-tions with Degenerations and Singularities, de Gruyter Series in NonlinearAnalysis and Applications (W. de Gruyter, Berlin–New York).
Drabek, P. and Pohozaev, S. (1997). Positive solutions for the p-Laplacian:application of the fibrering method, Proc. Roy. Soc. Edinburgh 127A,703–726.
Drabek, P. and Simader, C.G. (1999). Nonlinear eigenvalue problems for quasi-linear equations in unbounded domains, Math. Nachr. 203, 5–30.
Druet, O., Hebey, E., and Robert, F. (2008). Blow-up Theory for EllipticPDE’s in Rimemannian Geometry (Princeton University Press, Prince-ton).
Dupaigne, L., Ghergu, M., and Radulescu, V. (2007). Lane–Emden–Fowlerequations with convection and singular potential, J. Math. Pures Appl.87, 563–581.
Duvaut, G. and Lions, J.-L. (1982). Inequalities in Mechanics and PhysicsSpringer-Verlag, Berlin-New York.
Efimov, N.V. and Stechkin, S.B. (1961). Approximate compactness andChebyshev sets, Soviet Math. Dokl. 2, 1226–1228.
Ekeland, I. (1974). On the variational principle, J. Math. Anal. Appl. 47,324–353.
Ekeland, I. (1990). Convexity Methods in Hamiltonian Mechanics (SpringerVerlag, Berlin).
El Hamidi, A. (2004). Multiple solutions with changing sign energy to a non-linear elliptic equation, Commun. Pure Appl. Anal. 3, 253–265.
El Hamidi, A. (2004). Existence results to elliptic systems with nonstandardgrowth conditions, J. Math. Anal. Appl. 300, 30–42.

Bibliography 387
Escobar, J. (1992). The Yamabe problem on manifolds with boundary, J. Dif-fer. Geom. 35, 21–84.
Escobar, J. (1992). Conformal deformation of Riemannian metric to a scalarflat metric with constant mean curvature on the boundary, Ann. Math.136, 1–50.
Escobar, J. (1996). Conformal metric with prescribed mean curvature on theboundary, Calc. Var. Partial Differential Equations 4, 559–592.
Esteban, M. (1983). Nonlinear elliptic problems in strip-like domains: sym-metry of positive vortex rings, Nonlinear Analysis, TMA 7, 365–379.
Esteban, M. and Lions, P.-L. (1983). A compactness lemma, Nonlinear Anal-ysis, TMA 7, 381–385.
Fadel, E.R. and Husseini, S.Y. (1987). Relative cohomological index theories,Adv. Math. 64, 1–31.
Fan, X.L. and Zhao, Y.Z. (2001). Linking and multiplicity results for the p-Laplacian on unbounded cylinders, J. Math. Anal. Appl. 260, 479–489.
Faraci, F. and Kristaly, A. (2007). One-dimensional scalar field equations in-volving an oscillatory nonlinear term, Discrete Contin. Dyn. Syst. 18,107–120.
Felmer, P. and Figueiredo, D.G. de (1994). On superquadratic elliptic systems,Trans. Amer. Math. Soc. 343, 99–116.
Felmer, P., Manasevich, R., and Thelin, F. de (1992). Existence and unique-ness of positive solutions for certain quasilinear elliptic systems, Comm.Partial Differential Equations 17, 2013–2029.
Figueiredo, D.G. de (1989). The Ekeland Variational Principle with Applica-tions and Detours (Tata Intitute of Fund. Research, Bombay).
Figueiredo, D.G. de (1998). Semilinear elliptic systems, Nonlinear FunctionalAnalysis and Applications to Differential Equations, Trieste, 1997, 122–152. World Science Publ. River Edge, NJ.
Figueiredo, D.G. de, Gossez, J.-P., and Ubilla, P. (2003). Local superlinearityand sublinearity for indefinite semilinear elliptic problems, J. Funct. Anal.199, 452–467.
Figueiredo, D.G. de, Gossez, J.-P., and Ubilla, P. (2006). Multiplicity resultsfor a family of semilinear elliptic problems under local superlinearity andsublinearity, J. Eur. Math. Soc. (JEMS) 8, 269–286.
Figueiredo, D.G. de and Ruf, B. (2004). Elliptic systems with nonlinearitiesof arbitrary growth, Mediterr. J. Math. 1, 417–431.
Filippucci, R., Pucci, P., and Radulescu, V. (2008). Existence and non-existence results for quasilinear elliptic exterior problems with nonlinearboundary conditions, Comm. Partial Differential Equations 33, 706–717.
Findley, W.L., Lai, J.S., and Onaran, K. (1976). Creep and Relaxation of Non-linear Viscoelastic Materials (North Holland Publ. House, Amsterdam–New York–Oxford).
Floer, A. and Weinstein, A. (1986). Nonspreading wave packets for the cubicSchrodinger equation with a bounded potential, J. Funct. Anal. 69, 397–408.
Garcıa-Azorero, J., Montefusco, E., and Peral, I. (2000). Bifurcation for thep-Laplacian in RN , Adv. Diff. Equations 5, 435–464.
Garcıa-Azorero, J. and Peral, I. (1987). Existence and uniqueness for the p–Laplacian: nonlinear eigenvalues, Comm. Partial Differential Equations12, 1389–1430.
Gasinski, L. and Papageorgiu, N. (2005). Nonsmooth Critical Point Theory

388 Bibliography
and Nonlinear Boundary Value Problems (Chapman & Hall/CRC, BocaRaton).
Georgiev, P. (2005). Parametric Borwein-Preiss variational principle and ap-plications, Proc. Amer. Math. Soc. 133, 3211–3225.
Ghergu, M. and Radulescu, V. (2008). Singular Elliptic Problems. Bifurcationand Asymptotic Analysis. Oxford Lecture Series in Mathematics and itsApplications, Vol. 37 (Oxford University Press, New York).
Ghoussoub, N. (1991). Location, multiplicity, and Morse inices of min-maxcritical points, J. Reine Angew. Math. 417, 27–76.
Ghoussoub, N. and Preiss, D. (1989). A general mountain pass principle forlocating and classifying critical points, Ann. Inst. H. Poincare, Anal. NonLineaire 6, 321–330.
Gomes, J.M. and Sanchez, L. (2005). A variational approach to some boundaryvalue problems in the half-line, Z. Angew. Math. Phys. 56, 192–209.
Grognet, S. (2000). Theoreme de Motzkin en courbure negative, Geom. Ded-icata 79, 219–227.
Grossinho, M.R. (1987). Some existence and bifurcation results for nonlinearelliptic problems in strip-like domains, Ricerche Mat. 36, 127–138.
Grossinho, M.R. and Tersian, S. (2001). An Introduction to Minimax Theo-rems and their Applications to Differential Equations (Kluwer AcademicPublishers, Dordrecht).
Grove K., ....Guillerme, ...Hebey, E. (1996). Sobolev Spaces on Riemannian Manifolds (Springer Verlag,
Heidelberg).Hebey, E. (1999). Nonlinear Analysis on Manifolds: Sobolev Spaces and In-
equalities (Courant Lecture Notes in Mathematics, New York).Hebey, E., Variational methods and elliptic equations in Riemannian geome-
try, Notes from lectures given at ICTP, unpublished.Hebey, E. and Vaugon, M. (1997). Sobolev spaces in the presence of symme-
tries, J. Math. Pures Appl. 76, 859–881.Hiriart-Urruty, J.-B. (1983). A short proof of the variational principle for
approximate solutions of a minimization problem, Amer. Math. Monthly90, 206–207.
Hofer, H. (1982). Variational and topological methods in partially orderedHilbert spaces, Math. Annalen 261, 493–514.
Hulshof, J., Mitidieri, E., and Vorst, R. van der (1998). Strongly indefinitesystems with critical Sobolev exponents, Trans. Amer. Math. Soc. 350,2349–2365.
Il’yasov, Y. and Runst, T. (2003). Positive solutions for indefinite inhomoge-neous Neumann elliptic problems, Electronic J. Diff. Equations 57, 1–21.
Ioffe, A.D. and Tikhomirov, V.M. (1997). Some remarks on variational prin-ciples, Mathematical Notes 61, 248–253.
Jabri, Y. (2003). The Mountain Pass Theorem. Variants, Generalizations andSome Applications. Encyclopedia of Mathematics and its Applications,Vol. 95 (Cambridge University Press, Cambridge).
Jayne, J.E. and Rogers, C.A. (2002). Selectors (Princeton University Press,Princeton).
Jebelean, P. (2008). Infinitely many solutions for ordinary p-Laplacian systemswith nonlinear boundary conditions, Commun. Pure Appl. Anal. 7, 267–275.

Bibliography 389
Jebelean, P. and Morosanu, G. (2005). Mountain pass type solutions fordiscontinuous perturbations of the vector p-Laplacian, Nonlinear Funct.Anal. Appl. 10, 591–611.
Jebelean, P. and Morosanu, G. (2006). Ordinary p-Laplacian systems withnonlinear boundary conditions, J. Math. Anal. Appl. 313, 738–753.
Jones, C. and Kupper, T. (1986). On the infinitely many solutions of a semi-linear elliptic equation, SIAM J. Math. Anal. 17, 803–835.
Jost, J. (1997). Nonpositivity Curvature: Geometric and Analytic Aspects(Birkhauser Verlag, Basel).
Kachanov, L.M. (1967). The Theory of Creep (National Lending Library forScience and Technology, Boston Spa, Yorkshire).
Kachanov, L.M. (1971). Foundations of the Theory of Plasticity (North Hol-land Publishing House, Amsterdam–London).
Kassay, G., Kolumban, J., and Pales, Zs. (1999). On Nash stationary points,Publ. Math. Debrecen 54, 267–279.
Kay, D.C. (1967). The Ptolemaic inequality in Hilbert geometries, PacificJ. Math. 21, 293–301.
Kawohl, B. (1990). On a family of torsional creep problems, J. Reine Angew.Math. 410, 1–22.
Kelly, P. and Straus, E. (1958). Curvature in Hilbert geometry, Pacific J.Math. 8, 119–125.
Kobayashi, J. (2001). A principle of symmetric criticality for variational in-equalities, Mathematical aspects of modelling structure formation phe-nomena, Gakuto Internat. Ser. Math. Sci. Appl. 17, 94–106.
Kobayashi, J. and Otani, M. (2004). The principle of symmetric criticality fornon-differentiable mappings, J. Funct. Anal. 214, 428–449.
Kourogenis, N. and Papageorgiou, N. (2000). Nonsmooth critical point theoryand nonlinear elliptic equations at resonance, J. Austral. Math. Soc. 69,245–271.
Kozma, L., Kristaly, A., and Varga, Cs. (2004). Critical point theorems onFinsler manifolds, Beitrage Algebra Geom. 45, 47–59.
Krasnosel’skii, M.A. (1964). Topological Methods in the Theory of NonlinearIntegral Equations (Pergamon Press Book, Macmillan, New York).
Krawcewicz, W. and Marzantowicz, W. (1990). Some remarks on theLusternik-Schnirelman method for non-differentiable functionals invari-ant with respect to a finite group action, Rocky Mountain J. Math. 20,1041–1049.
Kristaly, A. (2004). An existence result for gradient-type systems with a non-differentiable term on unbounded strips, J. Math. Anal. Appl. 229, 186–204.
Kristaly, A. (2005). Existence of two non-trivial solutions for a class of quasi-linear elliptic variational systems on stripe-like domains, Proc. Edinb.Math. Soc. 48, 1–13.
Kristaly, A. (2005). Infinitely many radial and non-radial solutions for a classof hemivariational inequalities, Rocky Mountain J. Math. 35, 1173–1190.
Kristaly, A. (2006). Infinitely many solutions for a differential inclusion prob-lem in RN , J. Differential Equations 220, 511–530.
Kristaly, A. (2006). Existence of nonzero weak solutions for a class of ellipticvariational inclusions systems in RN , Nonlinear Analysis 65, 1578–1594.
Kristaly, A. (2008). Detection of arbitrarily many solutions for perturbed el-

390 Bibliography
liptic problems involving oscillatory terms, J. Differential Equations 245,3849–3868.
Kristaly, A. (2009). Asymptotically critical problems on higher-dimensionalspheres, Discrete Contin. Dyn. Syst. 23, 919–935.
Kristaly, A. and Kozma, L. (2006). Metric characterization of Berwald spacesof non-positive flag curvature, Journal of Geometry and Physics 56, 1257–1270.
Kristaly, A. and Marzantowicz, W. (2008). Multiplicity of symmetrically dis-tinct sequences of solutions for a quasilinear problem in RN , NonlinearDifferential Equations and Applications (NoDEA) 15, 209–226.
Kristaly, A., Morosanu, G., and Roth A. (2008). Optimal placement of a de-posit between markets: Riemann-Finsler geometrical approach, J. Optim.Theory Appl. 139, 263–276.
Kristaly, A., Morosanu, G., and Tersian, S. (2007). Quasilinear elliptic prob-lems in RN involving oscillatory nonlinearities, J. Differential Equations235, 366–375.
Kristaly, A., Motreanu, V., and Varga, Cs. (2005). A minimax principle witha general Palais-Smale condition, Commun. Appl. Anal. 9, 285–297.
Kristaly, A. and Radulescu, V. (2009). Sublinear eigenvalue problems on com-pact Riemannian manifolds with applications in Emden-Fowler equations,Studia Mathematica 191, 237–246.
Kristaly, A. and Varga, Cs. (2003). Set-valued versions of Ky Fan’s inequalitywith application to variational inclusion theory, J. Math. Anal. Appl. 282,8–20.
Kristaly, A. and Varga, Cs. (2004). An Introduction to critical Point Theoryfor Nonsmooth Functions (Casa Cartii de Stiinta, Cluj-Napoca).
Kristaly, A. and Varga, Cs. (2007). Multiple solutions for elliptic problemswith singular and sublinear potentials, Proc. Amer. Math. Soc. 135, 2121–2126.
Kristaly, A., Varga, Cs., and Kozma, L. (2004). The dispersing of geodesicsin Berwald spaces of non-positive flag curvature, Houston J. Math. 30,413–420.
Kristaly, A., Varga, Cs., and Varga, V. (2005). An eigenvalue problem forhemivariational inequalities with combined nonlinearities on an infinitestrip, Nonlinear Analysis 63, 260–272.
Kulpa, W. and Szymanski, A. (2004). Infimum principle, Proc. Amer. Math.Soc. 132, 203–210.
Kuratowski, K. and Ryll-Nardzewski, C. (1965). A general theorem on selec-tors, Bull. Acad. Pol. Sci. 13, 397–403.
Lao, S.Y. (1992). Nonlinear p–Laplacian problems on unbounded domains,Proc. Amer. Math. Soc. 115, 1037–1045.
Ledyaev, Y.S. and Zhu, Q.J. (2007). Nonsmooth analysis on smooth manifolds,Trans. Amer. Math. Soc. 359, 3687–3732.
Lee, M.J. and Parker, T.H. (1987). The Yamabe problem, Bull. Amer. Math.Soc. 17, 37–91.
Li, S. and Liu, Z. (2002). Perturbations from symmetric elliptic boundaryvalue problems, J. Differential Equations 185, 271–280.
Li, S. and Wang, Z.-Q. (2002). Ljusternik-Schnirelman theory in partiallyordered Hilbert spaces, Trans. Amer. Math. Soc. 354, 3207–3227.
Li, Y.Y. and Li, A. (2006). A fully nonlinear version of the Yamabe problemon manifold with boundary, J. Eur. Math. Soc. 8, 295–316.

Bibliography 391
Lieb, E.H. and Loss, M. (1997). Analysis Graduate Studies in Mathematics,Vol. 14 (American Mathematical Society, Providence, RI).
Lions, P.-L. (1982). Symetrie et compacite dans les espaces de Sobolev,J. Funct. Anal. 49, 312–334.
Lions, P.-L. (1984). The concentration–compactness principle in the calculusof variations, Ann. Inst. H. Poincare, Anal. Non Lineaire 1, 109–145,223–283.
Lisei, H., Varga, Cs., and Horvath, A. (2008). Multiplicity results for a classof quasilinear eigenvalue problems on unbounded domains, Arch. Math.90, 256–266.
Lisei, H., Morosanu, G., and Varga, Cs. (2009). Multiplicity results for dou-ble eigenvalue problem involving the p-Laplacian, Taiwanese Journal ofMathematics 13, 1095–1110.
Ljusternik, L. and Schnirelman, L. (1934). Methodes Topologiques dans lesProblemes Variationnels (Hermann, Paris).
Loewen, P.D. and Wang, X. (2001). A generalized variational principle, Canad.J. Math. 53, 1174–1193.
Luo, Q. (2003). Generic stability of Nash equilibria for set-valued mappings,Acta Math. Sinica (Chin. Ser.) 46, 925–930.
Manasevich, R. and Mawhin, J. (1998). Periodic solutions for nonlinear sys-tems with p-Laplacian like operators, J. Differential Equations 145, 367–393.
Manasevich, R. and Mawhin, J. (2000). Boundary value problems for nonlinearperturbations of vector p-Laplacian like operators, J. Korean Math. Soc.37, 665–685.
Marano, S. and Motreanu, D. (2002). On a three critical points theorem fornon-differentiable functions and applications to nonlinear boundary valueproblems, Nonlinear Analysis 48, 37–52.
Marano, S. and Motreanu, D. (2002). Infinitely many critical points of non-differentiable functions and applications to a Neumann-type problem in-volving the p–Laplacian, J. Differential Equations 182, 108–120.
Marcus, M. and Mizel, M. (1979). Every superposition operator mapping oneSobolev space into another is continuous, J. Funct. Anal. 33, 217–229.
Marino, A. (1989). The calculus of variations and some semilinear variationalinequalities of elliptic and parabolic type, Partial Differential Equationsand the Calculus of Variations. Volume II. Essays in Honor of Ennio DeGiorgi, Birkauser, Boston.
Marino, A. and Scolozzi, D. (1983). Geodetiche con ostacolo, Boll. Un. Mat.Ital. B 2, 1–31.
Matsumoto, M. (1989). A slope of a mountain is a Finsler surface with respectto a time measure, J. Math. Kyoto Univ. 29, 17–25.
Mawhin, J. (2000). Some boundary value problems for Hartman type pertur-bations of the ordinary vector p-Laplacian, Nonlinear Anal. 40, 497–503.
Mawhin, J. and Willem, M. (1989). Critical Point Theory and HamiltonianSystems (Springer, New York).
McClendon, J.F. (1983). Minimax and variational inequalities for compactspaces, Proc. Amer. Math. Soc. 89, 717–721.
McLeod, J.B., Stuart, C.A., and Troy, W.C. (2003). Stability of standing wavesfor some nonlinear Schrodinger equations, Differential Integral Equations16, 1025–1038.
Mercuri, F. (1976). Closed geodesics on Finsler manifolds, Atti Accad. Naz.

392 Bibliography
Lincei Rend. Cl. Sci. Fis. Mat. Natur. 60, 111–118.Mezei, I. and Varga, Cs. (2008). Multiplicity results for a double eigenvalue
quasilinear problem on unbounded domain, Nonlinear Analysis TMA 69,4099–4105.
Mitidieri, E. (1993). A Rellich type identity and applications, Comm. PartialDifferential Equations 18, 125–151.
Mitidieri, E. and Bozhkov, Y. (2003). Existence of multiple solutions for quasi-linear systems via fibering method, J. Differential Equations 190, 239–267.
Moalla, F. (1966). Sur quelques theoremes globaux en geometrie finslerienne,Ann. Math. Pura Appl. 73, 319–365.
Morgan, J. and Scalzo, V. (2007). Pseudocontinuous functions and existenceof Nash equilibria, J. Math. Econom. 43, 174–183.
Morse, M. (1925). Relations between the critical points of a real function of nindependent variables, Trans. Amer. Math. Soc. 27, 345–396.
Morse, M. (1934). The calculus of variations in the large, Amer. Math. Soc.Colloq. Publ. 18.
Motreanu, D. and Panagiotopoulos, P.D. (1998). Minimax Theorems andQualitative Properties of the Solutions of Hemivariational Inequalities,Nonconvex Optimization Applications, vol. 29 (Kluwer, Dordrecht).
Montefusco, E. and Radulescu, V. (2001). Nonlinear eigenvalue problemsfor quasilinear operators on unbounded domains, Nonlinear DifferentialEquations Appl. (NoDEA) 8, 481–497.
Morrey, C.B. Jr. (1966). Multiple Integrals in the Calculus of Variations(Springer–Verlag, New York).
Moskovitz, D. and Dines, L. (1939). Convexity in a linear space with an innerproduct, Duke Math. J. 5, 520–534.
Motreanu, D. and Radulescu, V. (2003). Variational and Nonvariational Meth-ods in Nonlinear Analysis and Boundary Value Problems (Kluwer Aca-demic Publishers, Dordrecht).
Motreanu, D. and Varga, Cs. (1997). Some critical point results for locallyLipschitz functionals, Comm. Appl. Nonlin. Anal. 4, 17–33.
Motreanu, D. and Varga, Cs. (1999). A nonsmooth equivariant minimax prin-ciple, Comm. Appl. Anal. 3, 115–130.
Nash, J.F. (1950). Equilibrium points in n-person games, Proc. Nat. Acad.Sci. U. S. A. 36, 48–49.
Nash, J.F. (1951). Non-cooperative games, Annals Math. 54, 286–295.Nessah, R. and Kerstens, K. Characterization of the existence of Nash equi-
libria with non-convex strategy sets, Document du travail LEM, 2008-19,preprint, see http://lem.cnrs.fr/Portals/2/actus/DP 200819.pdf
Obata, M. (1971). The conjectures on conformal transformations of Rieman-nian manifolds, J. Diff. Geom. 6, 247–258.
Obersnel, F. and Omari, P. (2006). Positive solutions of elliptic problems withlocally oscillating nonlinearities, J. Math. Anal. Appl. 323, 913–929.
Omari, P. and Zanolin, F. (1996). Infinitely many solutions of a quasilinearelliptic problem with an oscillatory potential, Comm. Partial DifferentialEquations 21, 721–733.
O’Neill, B. (1983). Semi-Riemannian Geometry. With Applications to Rela-tivity (Academic Press, New York).
Palais, R. (1966). Ljusternik–Schnirelmann theory on Banach manifolds,Topology 5, 115–132.

Bibliography 393
Palais, R. (1979). The principle of symmetric criticality, Comm. Math. Phys.69, 19–30.
Palais, R. (1984). Applications of the Symmetric Criticality Principle inMathematical Physics and Differential Geometry, Proceedings of the 1981Shanghai Symposium on Differential Geometry and Differential Equations(Shanghai/Hefei 1981), 247-301, Science Press, Beijing.
Palais, R. and Smale, S. (1964). A generalized Morse theory, Bull. Amer.Math. Soc. 70, 165–171.
Pedersen, F.P. (1952). On spaces with negative curvature, Mat. Tidsskrift B1952, 66-89.
Pellissier, M.C. and Reynaud, M.L. (1974). Etude d’un modele mathematiqued’ecoulement de glacier, C.R. Acad. Sci. Paris, Ser. I Math. 279, 531–534.
Pfluger, K. (1998). Existence and multiplicity of solutions to a p-Laplacianequation with nonlinear boundary condition, Electronic J. DifferentialEquations 10, 1–13.
Pfluger, K. (1998). Compact traces in weighted Sobolev spaces, Analysis 18,65–83.
Phelps, R.R. (1957). Convex sets and nearest points, Proc. Amer. Math. Soc.8, 790–797.
Phelps, R.R. (1974). Support cones in Banach spaces and their applications,Adv. Math. 13, 1–19.
Pohozaev, S.I. (1979). On one approach to nonlinear equations, Dokl. Akad.Nauk 247, 1327–1331.
Pohozaev, S.I. (1988). On a constructive methods in calculus of approach tononlinear equations, Dokl. Akad. Nauk 298, 1330–1333.
Pohozaev, S.I. (1990). On fibering method for the solutions of nonlinear bound-ary value problems, Trudy Mat. Inst. Steklov 192, 146–163.
Pohozaev, S.I. (1999). The fibering method and its applications to nonlinearboundary value problems, Rend. Istit. Mat. Univ. Trieste 31, 235-305.
Poincare, H. (1890). Sur les equations aux derivees partielles de la physiquemathematique, Amer. J. Math. 12, 211–294.
Pucci, P. and Serrin, J. (1984). Extensions of the mountain pass theorem,J. Funct. Anal. 59, 185–210.
Pucci, P. and Serrin, J. (1985). A mountain pass theorem, J. Diff. Equations60, 142–149.
Pucci, P. and Serrin, J. (2007). The Maximum Principle. Progress in NonlinearDifferential Equations and their Applications, Vol. 73 (Birkhauser Verlag,Basel).
Rabinowitz, P.H. (1986). Minimax Methods in Critical Point Theory withApplications to Differential Equations, CBMS Reg. Conference Series inMathematics, 65 (American Mathematical Society, Providence, RI).
Rabinowitz, P.H. (1992). On a class of nonlinear Schrodinger equations,Z. Angew. Math. Phys. 43, 270–291.
Radulescu, V. (2008). Qualitative Analysis of Nonlinear Elliptic Partial Dif-ferential Equations: Monotonicity, Analytic, and Variational Methods.Contemporary Mathematics and Its Applications, Vol. 6 (Hindawi Publ.Corp., New York).
Rapcsak T. (1989). Minimum problems on differentiable manifolds, Optimiza-tion 20, 3–13.
Rapcsak T. (1991). Geodesic convexity in nonlinear optimization, J. Optim.

394 Bibliography
Theory Appl. 69, 169–183.Ricceri, B. (1999). A new method for the study of nonlinear eigenvalue prob-
lems, C.R. Acad. Sci. Paris, Ser. I 328, 251–256.Ricceri, B. (2000). On a three critical points theorem, Arch. Math. 75, 220–
226.Ricceri, B. (2000). A general variational principle and some of its applications,
J. Comput. Appl. Math. 113, 401–410.Ricceri, B. (2001). A further improvement of a minimax theorem of Boren-
shtein and Shul’man, J. Nonlinear Convex Anal. 2, 279–283.Ricceri, B. (2001). Infinitely many solutions of the Neumann problem for el-
liptic equations involving the p-Laplacian, Bull. London Math. Soc. 33,331–340.
Ricceri, B. (2002). Three solutions for a Neumann problem, Topol. Meth.Nonlin. Anal. 20, 275–281.
Ricceri, B. (2004). Sublevel sets and global minima of coercive functionals andlocal minima of their perturbations, J. Nonlin. Convex Anal. 5, 157–168.
Ricceri, B. (2005). A general multiplicity theorem for certain nonlinear equa-tions in Hilbert spaces, Proc. Amer. Math. Soc. 133, 3255–3261.
Ricceri, B. (2006). Minimax theorems for limits of parametrized functionshaving at most one local minimum lying in certain set, Topol. Appl., 153,3308–3312.
Ricceri, B. A three critical points theorem revisited, Nonlin. Anal. 70, 3084–3089.
Saint Raymond, J. (2000). On a minimax theorem, Arch. Math. 74, 432–437.Saint Raymond, J. (2002). On the multiplicity of the solutions of the equation
−∆u = λ f(u), J. Differential Equations 180, 65–88.Salvatore, A. (2008). Multiple solutions for elliptic systems with nonlinearities
of arbitrary growth, J. Differential Equations 244, 2529–2544.Schoen, R. (1984). Conformal deformation of a Riemannian metric to constant
scalar curvature, J. Diff. Geom. 20, 479–495.Schwartz, ??????????????????Serre, J.-P. (1951). Homologie singuliere des espaces fibres, Ann. Math. 54,
425–505.Servadei, R. (2006). Existence results for semilinear elliptic variational inequal-
ities with changing sign nonlinearities, Nonlinear Differential EquationsAppl. (NoDEA) 13, 311–335.
Shen, Z. (2003). Projectively flat Randers metrics with constant flag curvature,Math. Ann. 325, 19–30.
Shen, Z. (2003). Projectively flat Finsler metrics of constant flag curvature,Trans. Amer. Math. Soc. 355, 1713–1728.
Shen, Z. (2005). Finsler manifolds with nonpositive flag curvature and constantS-curvature, Math. Z. 249, 625–639.
Shen, Z. Some open problems in Finsler geometry,http://www.math.iupui.edu/∼zshen/Research/papers/Problem.pdf
Showalter, R.E. and Walkington, N.J. (1991). Diffusion of fluid in a fissuredmedium with microstructure, SIAM J. Math. Anal. 22, 1702–1722.
Sirakov, B. (2000). Existence and multiplicity of solutions of semi-linear ellipticequations in RN , Calc. Var. Partial Differential Equations 11, 119–142.
Socie-Methou, E. (2004). Behaviour of distance functions in Hilbert-Finslergeometry, Differential Geom. Appl. 20, 1–10.

Bibliography 395
Stegall, C. (1978). Optimization of functions on certain subsets of Banachspaces, Math. Ann. 236, 171-176.
Strauss, W.A. (1977). Existence of solitary waves in higher dimensions, Com-mun. Math. Phys. 55, 149–162.
Struwe, M. (1990). Variational Methods, (Springer-Verlag, Berlin).Sullivan, F. (1981). A characterization of complete metric spaces, Proc. Amer.
Math. Soc. 83, 345–346.Szulkin, A. (1986). Minimax methods for lower semicontinuous functions
and applications to nonlinear boundary value problems, Ann. Inst.H. Poincare, Anal. Non Lineaire 3, 77–109.
Tala, J.E. and Marchi, E. (1996). Games with non-convex strategy sets, Op-timization 37, 177–181.
Trudinger, N. (1968). Remarks concerning the conformal deformation of rie-mannian structures on compact manifold, Ann. Scuola Norm. Sup Pisa22, 265–274.
Tsar’kov, I.G. (2004). Nonunique solvability of certain differential equationsand their connection with geometric approximation theory, Math. Notes75, 259–271.
Udriste, C. (1994). Convex Functions and Optimization Methods on Rieman-nian Manifolds, Mathematics and its Applications, vol. 297 (Kluwer Aca-demic Publishers, Dordrecht).
Vorst, R. van der (1992). Variational identities and applications to differentialsystems, Arch. Rational Mech. Anal. 116, 375–398.
Vazquez, J.-L. and Veron, L. (1991). Solutions positives d’equations elliptiquessemi-lineaires sur des varietes riemanniennes compactes, C.R. Acad. Sci.Paris, Ser. I Math. 312, 811–815.
Velin, J. and Thelin, F. de (1993). Existence and nonexistence of nontrivialsolutions for some nonlinear elliptic systems, Rev. Mat. Univ. Complut.Madrid 6, 153–194.
Walter, R. (1976). Some analytical properties of geodesically convex sets, Abh.Math. Sem. Univ. Hamburg 45, 263–282.
Westfall, R.S. (1980). Never at Rest. A biography of Isaac Newton (CambridgeUniversity Press, Cambridge).
Whitehead, J. H. C. (1932). Convex region in the geometry of paths, QuarterlyJ. Math. Oxford 3, 33–42.
Willem, M. (1996). Minimax Theorems (Birkhauser, Boston).Yamabe, H. (1960). On a deformation of Riemannian structures on compact
manifolds, Osaka Math. J. 12, 21–37.Yu, H. and Zhang, Z. (2007). Pure strategy equilibria in games with countable
actions, J. Math. Econom. 43, 192–200.Zeidler, E. (1985). Nonlinear Functional Analysis and its Applications, Vol.
III (Springer Verlag, Berlin–Heidelberg–New York).Zhou, Y. and Huang, Y. (2000). Existence of solutions for a class of elliptic
variational inequality, J. Math. Anal. Appl. 250, 187–195.Ziad, A. (1999). Pure strategy Nash equilibria of non-zero-sum two-person
games: non-convex case, Econom. Lett. 62, 307–310.Zou, W. (2006). On finding sign-changing solutions, J. Funct. Anal. 234, 364–
419.

Index
(PS)-condition, 7(PS)c-condition, 7(PSZ)c-condition, 35(∇2)ij , 365(epi)c, 59(gij), 263(gij), 263
BV (Ω;RN ), 58C1 local minimizer, 30Ck,α(M), 366DF (u, c), 380Dαu, 359Dk,p(RN ), 362F+1(M), 379F−1(M), 379H1
0 local minimizer, 30
H1(RN ), 363Hm,p(Ω), 360H1
0 (Ω), 364
H1G(RN ), 363
Kc, 374L∞(Ω), 358Lp(Ω), 358Lp
loc(Ω), 358Lm(Γ; w2), 85Lp(Ω; w1), 85NS(x), 357TM , 15TM?, 16TK(u), 380TpM , 16
W−m,p′ (Ω), 360W m,p(Ω), 360
W 1,p0,G, 364
W m,p0 (Ω), 360
X?, 7∆Sn , 279∆pu, 281Γh, 17
γ (A), 369Cp
k , 365∇, 263ωn, 362R, 377∂f(u), 376π(g), 38dv(g), 365f0(u; v), 376f0
ε (u; v), 375fa, 377fc, 374p-Laplace operator, 281Limsupu′→uF (u′), 381cat (M), 17catM (A), 17, 368cuplong (M), 369distS(x), 357dist0S(x; v), 357epi (f), 353
Cech homology, 296
Nash critical point, 340
absolute neighborhood retract, 17acyclic, 296Aleksandrov curvature condition, 294almost critical point, 7altitude
positive, 13zero, 15
Arzela–Ascoli theorem, 31Asplund space, 8asymptotically critical growth, 256averaging operator, 39axially symmetric function, 45
backward proximinal set, 311Banach manifold, 15Banach space, 3
396

Index 397
Banach-Finsler manifold, 16complete, 16
Berwald space, 288, 293, 294, 308best approximation, 354best Sobolev constant, 361Bishop-Phelps theorem, 8bootstrap, 31Borwein-Preiss variational principle, 8boundary condition
Dirichlet, 261bounded set
backward, 287, 302forward, 287
Brezis-Lieb lemma, 359brachistochrone problem, viiBrouwer fixed point theorem, 295Busemann
curvature condition, 308non-positive curvature space, 290NPC inequality, 290, 294, 295
Caratheodory function, 87, 97, 109Caristi fixed point theorem, 225Cauchy sequence, 92Cerami condition, 15Chebyshev set, 354Chern connection, 284Christofel symbol, 288Christoffel symbols, 263Clarke directional derivative, 372Clarke subdifferential, 372cocycles, 369coercive functional, 24compact embedding, 361compact Riemann manifold, 263compatible, 362concave-convex nonlinearity, 194, 199concentration compactness principle, 120condition
Cerami, 15Palais-Smale, 7, 17, 374
conditionally critical point, 41cone, 354
contingent, 380convex, 353normal, 357positive, 354
conjugate point, 286, 292contingent cone, 380contingent derivative, 380continuous embedding, 361convex cone, 353convex function, 35, 36, 352convex set, 351core, 379cotangent bundle, 16covariant
derivative, 231, 284tensor field, 231
critical exponent, 194critical point, 7, 98, 109, 114, 193
lower, 376nonstable, 12of Degiovanni-type, 374of Szulkin-type, 35stable, 11
critical value, 35
deformation, 368deformation lemma, 374derivative
Clarke generalized directional, 372directional, 90, 357Frechet, 90Gateaux, 7, 22generalized directional, 376Radon-Nikodym, 69
derivative rule of vector fields, 285dilation, 351direct method, 221directional derivative, 90, 357Dirichlet boundary value condition, 261distance function, 357double eigenvalue problem, 24, 96, 97dual Finsler structure, 16duality mapping, 7duality pairing, 371
eigenspace, 280eigenvalue, 279, 281Ekeland variational principle, 4, 57Ekeland’s variational principle, 42embedding, 86, 90
compact, 361continuous, 361
Emden-Fowler equation, 229, 260energy functional, 12, 89epigraph, 353equation
Emden-Fowler, 229Euler, 31scalar field, 171Schrodinger, 119
essential value, 377Euclidean metric, 5Euler equation, 31exponential map, 285, 302
Fatou lemma, 64, 359Fermat theorem, 7fibering
spherical, 43fibering constraint, 43fibering functional, 43

398 Index
fibering method, 120fibering scheme, 40Finsler
manifold, 284, 291, 308metric, 299
Finsler structure, 16dual, 16
Finsler-Banach manifold, 15Finsler-metric ball
backward, 286forward, 286
Finslerian-Poincare disc, 306, 308first variation of arc length, 286fixed point set, 38fixed point set of a group action, 38flag curvature, 287, 288, 294fluid
dilatant, 83Newtonian, 83pseudo-plastic, 83
fluid mechanics, 83force field, 119forward proximinal set, 311Frechet differentiability, 90, 91function
axially symmetric, 45Caratheodory, 87, 97, 109convex, 35, 36, 352distance, 357Gamma, 362indicator, 46, 51–53penalty, 8quasi-concave, 145
function of bounded variations, 58functional
coercive, 24energy, 12locally Lipschitz, 371lower semi-continuous, 4of Szulkin type, 35perturbed, 5upper semi-continuous, 49
G-space, 289Gateaux differentiability, 7, 21, 22Gamma function, 362gauge theory, 2generalized
directional derivative, 301gradient, 300length of a curve, 290
generalized directional derivative, 376generalized gradient, 376geodesic, 285, 292, 306, 366geodesic convex, 287geodesically complete
backward, 287
forward, 287geometrical analysis, 2glacial sliding, 83global elliptic regularity, 367gravitational field, 307group-invariant
function, 38set, 38
Holder inequality, 104Holder space, 366Haar measure, 39Hahn-Banach theorem, 372Hilbert
distance, 291metric, 290
Hopf lemma, 279Hopf maximum principle, 266hyperbolic conservation law, 82hyperbolic space, 262
indefinite nonlinearity, 195indicator function, 46, 51–53inequality
Holder, 104nonconvex, 44Poincare, 201weighted Hardy-type, 85Young, 86
integral length, 286, 290invariant
function, 261set, 247
inverse image, 379isometry group, 262
Jacobi field, 286
kinetic energy, 119KKM theorem, 295Krasnoselski genus, 19, 369Kuratowski upper limit, 381
Lagrange multiplier method, 353Laplace-Beltrami operator, 230, 241Lebesgue decomposition, 69Lebesgue dominated convergence theorem, 219Lebesgue measure, 201Lebesgue space, 358
weighted, 85Lebourg mean value theorem, 373lemma
Brezis-Lieb, 359deformation, 374Fatou, 64, 359Hopf, 279Phelps, 8

Index 399
level set, 14Levi-Civita connection, 284Lipschitz perturbation, 11Ljusternik-Schnirelmann category, 368local minima, 114local minimizer, 30local minimum, 37locally
geodesic space, 290Lipschitz function, 298, 300Minkowski space, 288
locally Lipschitz functional, 371lower critical point, 376lower semi-continuity, 5lower semi-continuous
functional, 4set-valued map, 379
manifoldBanach, 15Finsler-Banach, 15Riemann, 279
Markovian property, 170maximum principle, 33
Hopf, 266measurable functions, 87measure
Haar, 39Lebesgue, 201
methoddirect, 221fibering, 40Lagrange multiplier, 353sub and supersolutions, 33topological, 193
metricRiemannian, 279, 280
metric ballbackward, 289forward, 289
metric space, 371metric tensor, 263minimization
compact case, 3noncompact case, 3
minimizerlocal, 30strict, 8strong, 8
minimizing sequence, 42minimum
local, 37Minty-type variational inequality, 296Morse theory, 42mountain pass geometry, 117, 221mountain pass point, 13mountain pass theorem, 13, 15, 120
Nash contingent point, 333Nemytskii operator, 87, 88, 91, 97non-positive curvature, 289non-positively curved metric space, 289nonconvex inequality, 44nonlinear field equation, 84nonlinearity
oscillatory, 193nonstable critical point, 12normal cone, 357normalized Haar measure, 39
one-parametric fibering method, 40, 154operator
p-Laplace, 281averaging, 39Laplace-Beltrami, 230, 241Nemytskii, 87, 88, 91, 97
optimal path, 13orthogonal group, 242oscillation, 221oscillatory nonlinearity, 193
pairtrivial, 377
Palais-Smale condition, 7, 17, 374parallel transport, 366path
optimal, 13penalty function, 8perturbation
Lipschitz, 11superlinear, 11
perturbed functional, 5Phelps lemma, 8Poincare inequality, 201point
mountain pass, 13porous media, 83positive altitude, 13positive cone, 354potential energy, 119principle
concentration compactness, 120symmetric criticality, 37uncertainty, 119
principle of symmetric criticality, 2, 37Pucci-Serrin theorem, 20
quantum field theory, 2quantum mechanics, 84quasi-concave function, 145quasilinear eigenvalue problem, 84
Radon-Nikodym derivative, 69Randers space, 306reference vector, 285

400 Index
reflexive Banach space, 3Rellich-Kondrachov theorem, 366representation of a group, 37Ricceri variational principle, 36Riemann-Finsler geometry, 299Riemannian
manifold, 288Riemannian connection, 263Riemannian manifold, 279
complete, 229, 287with boundary, 280without boundary, 281
Riemannian metric, 279, 280
saddle point theorem, 377scalar curvature, 280scalar field
equation, 171system, 171
Schauder regularity, 31Schrodinger equation, 119sectional curvature, 287, 294separable Asplund space, 8separable Banach space, 19sequentially weakly continuous, 110set
Chebyshev, 354convex, 351upper contour, 353weakly closed, 176
set-valued analysis, 379set-valued map, 379shear stress, 83shock waves, 82sign-changing solution, 241, 261sleek, 381smooth bump, 8Smulyan test, 8Sobolev embedding theorem, 361Sobolev exponent
critical, 45Sobolev space, 358
weighted, 85solution
sign-changing, 261space
Asplund, 8Banach, 3functions of bounded variations, 58Holder, 366Lebesgue, 358metric, 371Sobolev, 358tangent, 16weighted Sobolev, 85
spherical fibering, 43stable critical point, 11
Stampacchia-type variational inequality, 296stationary variational inequality, 44Stegall variational principle, 8strict minimizer, 8strip-like domain, 45, 50strong extremum, 8strong minimizer, 8subdifferential, 35subsolution, 33superconductivity, 2supercritical growth, 242superlinear case, 96superlinear perturbation, 11supersolution, 33symbols
Christoffel, 263symmetric criticality
principle, 37symmetric space, 262system
scalar field, 171Szulkin-type functional, 35
tangent bundle, 16tangent space, 16tangent vector, 357theorem
Ambrosetti–Rabinowitz, 42Arzela–Ascoli, 31Bishop-Phelps, 8Caristi, 225Cartan-Hadamard, 288dominated convergence, 219, 359Fermat, 7Hahn-Banach theorem, 372Hopf-Rinow, 288Lebourg mean value theorem, 373mountain pass, 42, 120Pucci-Serrin, 20Rellich-Kondrachov, 366saddle point, 377Sobolev embedding, 361Weierstrass, 3
thermodynamic variables, 351topological invariant, 15Torricelli point, 298torsional creep, 83
elastic, 83plastic, 83
totals-backward cost, 300s-forward cost, 300backward cost, 298, 300forward cost, 298, 300
total energy, 119transitive group action, 243trivial pair, 377

Index 401
truncation map, 32
unbounded domain, 84uncertainty principle, 119unit sphere
volume, 362upper contour set, 353upper semi-continuous, 113
functional, 49set-valued map, 379
valuecritical, 35essential, 377
variational inequality, 45, 51variational principle
Borwein-Preiss, 8Ekeland, 4, 57Ricceri, 36Stegall, 8
vectorfield, 261space, 51tangent, 357
vertex, 354
weakpartial derivative, 360distributional derivative, 359
weak slope, 374weak solution, 89weakly closed set, 176weakly convergent, 110, 115Weierstrass theorem, 3weight function, 85weighted Hardy-type inequality, 85weighted Lebesgue space, 85weighted Sobolev space, 84, 85
Yamabe problem, 120, 230Young inequality, 86
zero altitude, 15




![Quick Erd˝os-Gallai and Havel-Hakimi algorithmscompalg.inf.elte.hu/~tony/Kutatas/TAMOP/Papers-in-journals/EGHH-Acta... · rab´asi [48] h´al´ozati, Boz´oki, Ful¨¨ op, Poesz](https://static.fdocuments.in/doc/165x107/5e40a55c05aaac34b71da356/quick-erdos-gallai-and-havel-hakimi-tonykutatastamoppapers-in-journalseghh-acta.jpg)