Variable modal parameter identification for non-linear mdof...
12
217 Variable modal parameter identification for non-linear mdof systems Part I: Formulation and numerical validation Y.H. Chong and M. Imregun ∗ Imperial College of Science Technology and Medicine, Mechanical Engineering Department, Exhibition Road, London SW7 2BX, UK Tel.: +44 20 7594 7068; Fax: +44 20 7584 1560; E-mail: [email protected] and [email protected] Received 6 June 1999 Revised 5 January 2000 This paper deals with the formulation of a frequency do- main modal analysis technique that is applicable to weakly non-linear multi-degree of freedom (MDOF) systems with well-separated modes. The concept of linear modal super- position is combined with the normal non-linear mode tech- nique, an approach that allows the formulation of a system identification procedure in terms of variable modal parame- ters. The numerical study was focused on a 4-DOF system with cubic stiffness non-linearity, and the modal parameters were obtained as functions of the modal amplitude. It was shown that the methodology was well suited to the study of practical cases for which the underlying linear model may be approximate. Similarly, the technique was found to be robust in the presence of measurement noise, though some adverse effects were observed for high noise levels. Once the variable modal parameters were extracted at some given force level, the non-linear responses were predicted at other force levels via synthesis of normal non-linear modes. The same responses were also obtained using a harmonic balance approach and very good agreement was obtained between the two sets of results. The procedure is well suited to the study of industrial cases because of its compatibility with existing finite element methods and linear modal analysis techniques. 1. Introduction Currently, three representations of the same model, namely response, spatial and modal descriptions, are ∗ Corresponding author. routinely used for the prediction of the dynamic be- haviour of a given structure. For linear systems, these representations are interchangeable and the choice of a particular description is based on the objectives of the analysis or the required form of the output. Spatial models are usually built for modelling purposes only and they have no direct established use in experimental modal analysis. Measured and predicted results can be compared using response models, though modal mod- els are usually a more popular choice. Their widespread use stems from their compactness: a system with a large number of DOFs can be represented by a small number of modal parameters. In addition, they provide direct information about the actual mode shapes which are of- ten of primary interest for minimising dynamic stress- es. Consequently, most experimental parameter esti- mation techniques have been developed around modal models using the basic assumption of linearity. When dealing with non-linear systems, linear modal analysis techniques can be shown to introduce errors, usually by yielding complex mode shapes as if the system was non-proportionally damped [5]. Indeed, for situations involving large-amplitude vibration or significant non- linearities, linear modal analysis tools are generally considered to be inadequate for obtaining reliable and consistent results. In such instances, the modal param- eters may vary significantly with structural response, a feature that violates the principle of linearity. Although several approaches have been proposed to provide qualitative and quantitative assessments of structural non-linearities, these are often limited to spe- cific types and there are no techniques that can routinely deal with the general case [4,13]. Of particular interest here are the non-linear system identification tools and these can be classified as physical, non-physical, para- metric and non-parametric. While a physical param- eter based approach has the advantage of direct inter- pretability, it usually requires an explicit spatial model which can be very large for representative engineering systems. Such models are best suited to small systems, Shock and Vibration 7 (2000) 217–227 ISSN 1070-9622 / $8.00 2000, IOS Press. All rights reserved
Transcript of Variable modal parameter identification for non-linear mdof...

217
Variable modal parameter identification fornon-linear mdof systemsPart I: Formulation and numerical validation
Y.H. Chong and M. Imregun∗Imperial College of Science Technology and Medicine,Mechanical Engineering Department, ExhibitionRoad, London SW7 2BX, UKTel.: +44 20 7594 7068; Fax: +44 20 7584 1560;E-mail: [email protected] and [email protected]
Received 6 June 1999
Revised 5 January 2000
This paper deals with the formulation of a frequency do-main modal analysis technique that is applicable to weaklynon-linear multi-degree of freedom (MDOF) systems withwell-separated modes. The concept of linear modal super-position is combined with the normal non-linear mode tech-nique, an approach that allows the formulation of a systemidentification procedure in terms of variable modal parame-ters. The numerical study was focused on a 4-DOF systemwith cubic stiffness non-linearity, and the modal parameterswere obtained as functions of the modal amplitude. It wasshown that the methodology was well suited to the study ofpractical cases for which the underlying linear model maybe approximate. Similarly, the technique was found to berobust in the presence of measurement noise, though someadverse effects were observed for high noise levels. Oncethe variable modal parameters were extracted at some givenforce level, the non-linear responses were predicted at otherforce levels via synthesis of normal non-linear modes. Thesame responses were also obtained using a harmonic balanceapproach and very good agreement was obtained between thetwo sets of results. The procedure is well suited to the studyof industrial cases because of its compatibility with existingfinite element methods and linear modal analysis techniques.
1. Introduction
Currently, three representations of the same model,namely response, spatial and modal descriptions, are
∗Corresponding author.
routinely used for the prediction of the dynamic be-haviour of a given structure. For linear systems, theserepresentations are interchangeable and the choice ofa particular description is based on the objectives ofthe analysis or the required form of the output. Spatialmodels are usually built for modelling purposes onlyand they have no direct established use in experimentalmodal analysis. Measured and predicted results can becompared using response models, though modal mod-els are usually a more popular choice. Their widespreaduse stems from their compactness: a system with a largenumber of DOFs can be represented by a small numberof modal parameters. In addition, they provide directinformation about the actual mode shapes which are of-ten of primary interest for minimising dynamic stress-es. Consequently, most experimental parameter esti-mation techniques have been developed around modalmodels using the basic assumption of linearity. Whendealing with non-linear systems, linear modal analysistechniques can be shown to introduce errors, usuallyby yielding complex mode shapes as if the system wasnon-proportionally damped [5]. Indeed, for situationsinvolving large-amplitude vibration or significant non-linearities, linear modal analysis tools are generallyconsidered to be inadequate for obtaining reliable andconsistent results. In such instances, the modal param-eters may vary significantly with structural response, afeature that violates the principle of linearity.
Although several approaches have been proposedto provide qualitative and quantitative assessments ofstructural non-linearities, these are often limited to spe-cific types and there are no techniques that can routinelydeal with the general case [4,13]. Of particular interesthere are the non-linear system identification tools andthese can be classified as physical, non-physical, para-metric and non-parametric. While a physical param-eter based approach has the advantage of direct inter-pretability, it usually requires an explicit spatial modelwhich can be very large for representative engineeringsystems. Such models are best suited to small systems,
Shock and Vibration 7 (2000) 217–227ISSN 1070-9622 / $8.00 2000, IOS Press. All rights reserved

218 Y.H. Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems – part I
or perhaps to those with localised non-linearities. Forlarge structures, modal models are often favoured overtheir spatial counterparts because of their computation-al efficiency in reducing bulky frequency domain datainto a much smaller, albeit often truncated, set of eigenparameters. Thus, the idea of extending the use of lin-ear modal models to the vibration analysis of non-linearsystems is very attractive and such an approach will bepursued here.
The concept of a non-linear mode was first stud-ied by [7] who used a geometrical method. His workinitiated several studies which showed that the non-linear normal mode concept could be used to study thebehaviour of non-linear systems [10,14]. Using thesame approach, [9] proposed a non-linear modal iden-tification procedure which uses a non-physical, non-parametric formulation. Their work is compatible withexisting linear techniques and makes use of the sin-gle non-linear resonant mode theory of [11,12] and ofequivalent linearisation approach of [2]. The analy-sis is based on a first-order frequency domain approx-imation and hence it requires much less computationaleffort than equivalent time domain methods. A sig-nificant drawback is the requirement to know the vi-bration characteristics of the underlying linear systemprior to the analysis. However, in most cases, the useof low excitation levels may allow to obtain linearisedFRFs for the non-linear system under study. A stan-dard modal analysis of these low-excitation FRFs willthen yield the underlying linear system. Such a routewill also be explored here by extending the work of [9]to large MDOF systems representing real engineeringstructures, and by including both inherent structuraldamping and non-linear friction damping. It will alsobe shown that approximate underlying linear modelswill be sufficient for most engineering applications.
The main purpose of Part I is to describe a non-linear modal analysis methodology that is applicable toweakly non-linear MDOF systems with well-separatedmodes and to validate the formulation using a 4-DOFnumerical test case. The effects of wrongly-estimatedlinear underlying model and robustness in the presenceof measurement noise will also be discussed in somedetail. The experimental verification and the applica-tion to a representative engineering case will be consid-ered in Part II. One of the advantages of the method isthe ability to determine the response of the non-linearsystem at any force level once its variable modal pa-rameters have been identified at some reference forcelevel. Such a feature will allow to undertake more ad-vanced applications such as the coupling of non-linearsubcomponents.
2. Background Theory
The motion of an n-DOF non-linear system, sub-jected to a harmonic external force F with excitationfrequency Ω, can be described by:
[M ]X + [C]X + [K]X + fnl(X, X)(1)= FcosΩt
where [M], [C] and [K] are the mass, stiffness anddamping matrices of the linear system, X is the phys-ical response vector and fnl(x, x) is a non-linearrestoring force vector which is a function of displace-ment and velocity. Linear modal analysis techniquesassume that the non-linear term in (2) is small enoughto be ignored so that the matrix equation can be decou-pled using the eigenvectors of [M ] and [K] matrices.However, such an approach is no longer applicable ifthe non-linear term, fnl, is significant.
2.1. Non-linear modal identification method
While early single non-linear mode approaches ac-counted for natural frequency variations with the ampli-tude of the response, they ignored the amplitude depen-dence of the mode shapes. [11,12] argued that the useof a linear normal mode to describe the resonant con-dition of non-linear systems could lead to considerablediscrepancies and suggested the use of the non-linearnormal mode concept, introduced earlier by [7]. [9]assumed amplitude-dependent mode shapes and postu-lated that the combined effect of all non-linear contri-butions will only affect a selected single resonance ofinterest only, while the remaining modes will behave ina linear fashion. For example, if the excitation frequen-cy, Ω, is close to the jth resonance, ωj , the relationshipbetween modal co-ordinates and physical co-ordinatescan be expressed as:
X = [φ1 · · · φj · · · φn]Q (2)
where Q is the modal response vector. The j th modeshape column, φj , is a function of the vibration am-plitude, as indicated by the bar subscript. The othercolumns remain the same as the linear ones. Assumingthat the non-linear mode shape, φj is a linear combi-nation of the linear resonant mode and its neighbours,one can write:
φj = bjjφj + b1j(Qj)φ1 + b2j(Qj)φ2
+ · · ·+ bnj(Qj)φn (3)
=n∑
k=1
bkj(Qj)φk

Y.H. Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems – part I 219
where parameters bkj are the non-linear mode partic-ipation factors. These parameters are assumed to bea function of the resonant modal amplitude, Q j . Bydefinition, the diagonal terms, bjj , are unity, while theoff-diagonal terms, bkj , are allowed to vary with theresonant modal amplitude, Qj , and hence represent thecoupled nature of the non-linear modal equations. Inthis way, it is possible to express all non-resonant modaldisplacement effects using a single resonant modal dis-placement term, a feature that will allow some decou-pling of the full equations of motion. The coefficientbkj can also be written in the following form:
bkj(Qj) = φTk [M ]φj
(4)∀Qj : bjj(Qj) = 1
Clearly, the bkj matrix will be unity if the systemis linear. Using (4), which defines the j th non-linearmode shape, (2) can be rewritten to yield the uncoupledequation of motion for the j th non-linear mode. Preand post multiplying the mass and stiffness matrices of(2) with the non-linear j th mode shape, the modal massand stiffness matrices can be obtained as:
[m] = [φ]T [M ][φ]
=
. . . b1j
I b2j
. . ....
b1j b2j · · ·∑n
k=1 b2kj · · · · · · bnj
.... . .
... I
bnj. . .
(5)
[k] = [φ]T [K][φ] =
ω21 b1jω
21
ω22 b2jω
22
. . ....
b1jω21 b2jω
22 · · · ∑n
k=1 b2kjω
2j · · · · · · bnjω
2n
... ω2j+1
.... . .
bnjω2n ω2
n
(6)
where, as before, the bar superscript represents theamplitude-dependent nature of the non-linear modalparameters. Although the normalised mass and stiff-ness matrices are not completely diagonal, the non-diagonal terms can be assumed to be small since the
contribution of the non-resonant terms is small by def-inition. As an approximation, a non-linear modal stiff-ness correction term, fj , and a non-linear modal damp-ing, ξ, are introduced to the resonant modal equationsto represent all such non-diagonal term contributionsimplicitly. The resonant modal equation of motion canthen be written as:
−Ω2mjQj + iΩξjQj + (kj + fj + iηj kj)Qj(7)
= φTj F
Equation (8) is identical to the original formulationby [9], except for the addition of a linear hystereticdamping term. The approximate non-linear modalmass and stiffness are given as:
mj = φTj [M ]φj ≈
n∑k=1
b2kj
kj = φTj [K]φj ≈
n∑k=1
b2kjω
2j (8)
Neglecting the damping term, (8) yields an approx-imate expression for the natural frequency of the j th
non-linear mode:
ω2j =
kj + fj
mj(9)
Upon substituting (9) into (8), the resonant modaldisplacement is given as:
Qj =φT
j F(ω2
j − Ω2)∑n
k=1 b2kj + iηj kj
=(∑n
k=1 bkjφk)T F(ω2
j − Ω2)∑n
k=1 b2kj + i(ηj kj + Ωξ)
(10)
2.2. Synthesis of normal non-linear modes
Using the single non-linear mode concept, the re-sponse of a non-linear system can now be computed asthe summation of the non-linear contribution from thejth mode and linear contributions from the remainingmodes. Around non-linear mode j, for excitation co-ordinate i and response co-ordinate m, the non-linearreceptance FRF (αim)NL can be expressed as:
(αim)NL = [αim(Ω, Qj) + αim(Ω)] (11)
where αim, the linear part of the receptance FRF, canbe written as:
αim(Ω) =n∑
l=1
φilφml
ml(ω2l − Ω2) + iηlkl
(12)l = j

220 Y.H. Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems – part I
The jth non-linear modal contribution is given as:
αim(Ω, Qj)=φij φmj
mj(ω2j (Qj) − Ω2) + i(ηj kj + Ωξ)
=(∑n
s=1 bsjφis)(∑n
k=1 bkjφmk)mj(ω2
j − Ω2) + i(ηj kj + Ωξ)(13)
2.3. Extension to non-linear modal parameterextraction
The basic idea behind non-linear parameter extrac-tion is to minimise the difference between measured (orsimulated) receptances and those obtained from (11)by varying the non-linear parameters, bkj and ωj . Theproblem can be solved numerically by using any stan-dard multi-variable minimisation process. The size ofthe problem is determined by the number of participat-ing neighbouring modes to be included in the analysis.For instance, if all non-linear parameters were to beincluded in the analysis, the number of parameters tobe extracted would be the same as the number of DOFs.Numerical experience indicates that the bkj parameterswhich are not near the resonant mode of interest can beignored and the analysis can be conducted by retain-ing a few neighbouring modes only. In any case, theidentification process involves the use of a column ofreceptance matrix which contains the necessary infor-mation for determining the vibration characteristics ofa structure. By separating the measured and predict-ed non-linear responses into their real and imaginaryparts, the function to be minimised can be written as:
gR1(ω2j , bkj) = REα∗
1m − RE[α1m(Ω, Qj)
+α1m(Ω)]...
gRn(ω2j , bkj) = REα∗
nm − RE[αnm(Ω, Qj)
+αnm(Ω)] (14)
gI1(ω2j , bkj) = IMα∗
1m − IM[α1m(Ω, Qj)
+α1m(Ω)]...
gIn(ω2j , bkj) = IMα∗
nm − IM[αnm(Ω, Qj)
+αnm(Ω)]where the g’s are the functions to be minimised andα∗’s are the measured receptances. One of the simplestapproaches to minimising (15) is to monitor the norm of
the vector g which contains 2n functions because ofthe explicit treatment of the real and imaginary parts. Inthe following numerical studies, the minimisation wascarried out by a MATLAB subroutine which uses theGauss-Newton method with a mixed quadratic/cubicline search procedure.
At the end of the minimisation process, each exci-tation frequency used yields a set of non-linear modalparameters which are associated with that particularmodal amplitude. The non-linear mode shape is thenobtained by inserting the identified participation factor,bkj , and the (known) linear mode shape into (4). Usingthe calculated non-linear mode shape for the j th mode,the corresponding resonant modal amplitude, Q j is de-termined from the measured physical displacement am-plitude by inverting (2). The variation of the non-linearmodal parameters with the resonant modal amplitudecan then be obtained by considering a sufficient numberof excitation frequencies. Further analysis may requirea suitable polynomial curve-fit to this variation so thata continuous representation can be used.
3. Generation of reference data for non-linearresponse
Using an equivalent linearisation technique, it is pos-sible to use (1) to compute the non- linear response.Such an approach allows not only the generation ofreference data for non-linear modal analysis but it al-so enables the validation of the resulting non-linearmodal model by considering several force levels. Theequivalent linearisation method is essentially an opti-mization process which seeks a linearised representa-tion of a non-linear system at some defined amplitudeso that the difference between the two states is min-imised [2]. One of its best known variants, the harmon-ic balance method (HBM), determines the equivalentlinear stiffness by calculating the harmonic terms of thenon-linear force over one vibration cycle. Despite itsapproximate nature, its computational efficiency madethe HBM a favoured choice over time-domain tech-niques or higher-order FRF representations [1]. Al-though some unsymmetrical non-linearities are knownto exhibit significant super and sub harmonic charac-teristics, the fundamental harmonic is still much largerfor a wide class of non-linearities, such as those studiedhere. In any case, the HBM has been checked throughexperiments and direct numerical integration [3,6,8].Further experimental validation will be presented inPart II of this paper.

Y.H. Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems – part I 221
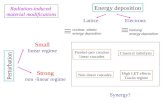
M1 M2 M3 M4
K1 K2 K3K4 K5
M1=0.1 M2=0.2 M3=0.3 M4=0.4 (Kg)K1=K2=K3=K4=K5=10000 (N/M)
Fig. 1. The 4-DOF system.
Assuming harmonic oscillation and considering thefirst harmonic only, the real and imaginary parts of thelinearised stiffness can be expressed as [8]:
K ′r(X) =
1πX
∫ 2π
0
fnl cosΩtdt
(15)
K ′i(X) =
−1πX
∫ 2π
0
fnl sin Ωtdt
where both integrals of fnl represent the fundamentalharmonic of the non- linear force. These are normalisedby the amplitude of response, X , to obtain the requireddescribing functions. The above non-linear terms canthen be inserted into (2) to calculate an amplitude-dependent quasi-linear receptance matrix, [α(X)]. Fora system excited by external force F, the equation ofmotion can be written as:
X = [α(X)]F (16)
and solved iteratively, say using a Newton-Raphsonapproach.
4. Case Study
4.1. 4-DOF non-linear system
The case study was conducted on a 4-DOF mass-spring system with 0.5% proportional structural damp-ing. As shown in Fig. 1, a non-linear cubic stiffness ele-ment was introduced between the ground and first mass.The loading characteristic of the non-linear spring isgiven by fnl = βX3 and its describing function can bewritten as [6]:
K′(X) =
34βX2 (17)
The severity of the non-linear element is determinedby the coefficient of cubic term, β, and a value of 200was used for the case study. Figure 2 shows the effectof cubic stiffness non-linearity on the response of the
structure. One of the most distinctive features of thisparticular non-linearity type is the leaning of the res-onance peak towards right.The distortions are mostlyconfined to the resonant regions and the deviation isgreatest for the 4th mode where the response amplitudeof Mass 1 is largest. Thus the 4th mode was chosen forthe proposed non-linear modal analysis.
4.1.1. Analysis using all 4 modesAs mentioned previously, the number of parameters
to be extracted depends on the number of modes in-cluded in the analysis. In this particular example, theeffects of all three neighbouring modes were included.Consequently, there are 4 non-linear parameters thatneed to be extracted: the non-linear natural frequency,ω4, and three bkj parameters, namely b14, b24 and b34.
The first column of the response matrix was obtainedvia HBM simulations. The response data were com-puted for a force level of 200 N applied at Mass 1. Anon-linear modal analysis was performed next usingthe approach described in Section 2 and the findingsare shown in Fig. 3. The stiffness increases with the re-sponse amplitude and this results in an increase in nat-ural frequency, ωj . As the non-linearity becomes morepronounced, the resonance tends to lean more and moreto the right until a jump occurs, this being the result ofa sudden large change in response due to a small per-turbation. The point where the jump phenomenon oc-curs largely depends on the size of frequency step takenfor the simulation. Also, depending on increasing anddecreasing frequency steps, the “jump frequency” willbe different. The results of the non-linear modal anal-ysis in Fig. 3 concur with the characteristics describedabove. The hardening nature of the stiffness can beseen in the variation of the non-linear natural frequen-cy, ω4, with the modal amplitude. The participation ofneighbouring modes, bkj , also increase with the modalamplitude, indicating a greater distortion of the linearmode. Another noteworthy finding is the decrease of

222 Y.H. Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems – part I
Larger force
Fig. 2. Response of the 4 DOF system with cubic stiffness non-linearity.
bkj value as one moves away from the resonant mode,justifying that the corresponding modes can be ignored.
To complete the identification process, second-orderpolynomials were chosen to curve-fit the variation ofthe non-linear modal parameters (Fig. 3). The mathe-matical model of the non-linear modal parameters forthe 4th mode in terms of the 4th modal amplitude, Q4,is thus given by:
ω24 = c11Q
24 + c12Q4 + c13
b14 = c21Q24 + c22Q4 + c23
b24 = c31Q24 + c32Q4 + c33
b34 = c41Q24 + c42Q4 + c43
where the cij parameters are the actual polynomialcoefficients. Each mode of the system will generatea similar set of parameters to represent the non-linearbehaviour at that particular mode. For this example,the modal parameters of the first three modes may beexpected to be more or less linear.
4.1.2. Response generation at other force levelsOne of the major attractions of a non-linear modal
model is the ability to predict the response at any forcelevel. Here new responses were computed for force lev-els of 200N, 160N and 100N using the modal parame-ters extracted for a force level of 200N. The regeneratedand directly-computed responses are plotted in Fig. 4for all three force levels. There is very good agreementbetween the two sets. Furthermore, typical non-linearstiffness characteristics, such as non-circular Nyquistplots and jump phenomenon are successfully preservedby the extracted non-linear parameters.
5. Robustness checks
5.1. Sensitivity to the accuracy of the underlyinglinear model
The underlying linear model of a non-linear systemis usually obtained by exciting the system at a low forcelevel and performing a linear modal analysis on themeasured response functions1. It is also possible touse FE modelling for simple cases. However, neitherapproach can guarantee an accurate linear model andthe consequences of having an approximate underlyinglinear model will be investigated here.
An approximate underlying linear model of the 4-DOF system of Fig. 1 will now be obtained throughresponse measurements taken at a relatively high forcelevel of 100N. The results of a linear modal analysis,followed by response regeneration using the extractedlinear modal parameters, are shown in Fig. 5 wherethe true linear response is also plotted. It is clearlyseen that the linearised response is significantly dif-ferent from the true linear response obtained from theexact underlying system. Nevertheless, the approxi-mate underlying linear model, obtained from the linearmodal analysis, was used as input data to a non-linearmodal analysis. The results are shown in Fig. 6. Also
1Another way of linearising the response is to use the averag-ing properties of a random excitation signal, though the numericalsimulation of such a route is not straightforward.

Y.H. Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems – part I 223
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.452.388
2.39
2.392
2.394
2.396
2.398
2.4
2.402
2.404x 10
Modal amplitude, Q4
ω42
5
0.05 0.12 0.19 0.26 0.33 0.4 0.4-8
-7
-6
-5
-4
-3
-2
-1
0x 10
-3
Modal amplitude, Q4b
14
0.05 0.12 0.19 0.26 0.33 0.4 0.4-0.014
-0.012
-0.01
-0.008
-0.006
-0.004
-0.002
0
Modal amplitude, Q4
b24
0.05 0.12 0.19 0.26 0.33 0.4 0.40
0.005
0.01
0.015
0.02
0.025
Modal amplitude, Q4
b34
Fig. 3. Non-linear modal parameter variations for the 4-th mode: ∗ ∗ ∗ Extracted values Curve-fitted values.
plotted in the same figure are the results obtained withthe exact underlying linear model. It is easily seen thatboth sets of results are very similar, with the exceptionof the bkj parameter which shows an offset. On theother hand, the natural frequency variation is identical,indicating that approximate underlying linear modelscan be used in non-linear parameter identification. Thisobservation has a significant implication for real appli-cations since it is almost always possible to obtain anapproximate linear system via a linear modal analysisof responses obtained at low forcing.
The curve-fitted non-linear modal parameters wereused to regenerate responses at force levels of 1N, 100N
and 200N. The same responses were also obtained viaHBM simulations for comparison purposes (Fig. 7).Very good agreement was obtained in all cases, includ-ing the 1 N force level, which effectively correspondsto the true underlying linear response.
5.2. Effects of measurement noise
5% random noise was added to the non-linear re-sponses generated for a force level of 100N and a linearmodal analysis was carried out as before to obtain theunderlying linear model. Using this approximate un-derlying linear model, a non-linear modal analysis was

224 Y.H. Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems – part I
76.5 77 77.5 78 78.5 79-60
-58
-56
-54
-52
-50
-48
-46
-44
-42
-40
Freq/Hz
Rec
epta
nce
[dB
re
1 m
/N]
-4 -3 -2 -1 0 1 2 3 4
x 10-3
-9
-8
-7
-6
-5
-4
-3
-2
-1
0x 10
-3
ReIm
Fig. 4. Response predictions with different force levels: . . . Linear FRF, HBM simulation, ∗ ∗ ∗ Regenerated using modal parameters.
76 76.5 77 77.5 78 78.5 79-104
-102
-100
-98
-96
-94
-92
-90
-88
Freq (Hz)
Rec
epta
nce
[dB
re
1 m
/N]
Fig. 5. Linear modal analysis of non-linear response: . . .True linear FRF, −. − .− Linearised response through linear modal analysis, Truenon-linear response.
conducted on the noise-added responses and the resultsare shown in Fig. 8. The non-linear modal parametervariations show a clear noise effect, though a curve-fitis relatively straightforward for the natural frequencyvariation (Fig. 8). Although it can be argued that thelevel of noise is unacceptable for curve-fitting the bkj
parameter, the overall trend is well captured by a cubic
polynomial, the order of which is selected using thenatural frequency variation. In any case, experimentalnoise levels are usually around 1-3 % and hence a typ-ical situation may well be less severe than that studiedhere. Finally, Figure 9 shows the response predictionsfor various force levels using the extracted non-linearmodal parameters. There is good agreement between

Y.H. Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems – part I 225
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70.0
0.8
1.6
2.4
3.2
4.0
4.8
5.6
6.4x 10
-2
Modal amplitude, Q4b
34
With correct linear modelWith incorrect linear model
Fig. 6. Non-linear modal parameters obtained with approximate and exact underlying linear models.
76 76.5 77 77.5 78 78.5 79-66
-64
-62
-60
-58
-56
-54
-52
-50
-48
Freq/Hz
Rec
epta
nce
[dB
re
1 m
/N]
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
x 10-3
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0x 10
-3
Re
Im
Fig. 7. Response predictions with an approximate underlying linear model: . . . Regeneration with linear modal parameters only, HBMsimulations, ++ Regeneration with non-linear parameters.
direct simulations and the regenerated responses, a fea-ture which indicates the robustness of the non-linearparameter identification technique in the presence ofmeasurement errors.
6. Concluding Remarks
– A modal analysis method has been presentedfor weakly non-linear MDOF systems with well-
separated modes. It has been shown that the tech-nique is applicable to practical situations since itcan cope with approximate underlying linear mod-els and tolerate experimental noise.
– Once the non-linear modal parameters are ob-tained for a given force level, the response of thenon-linear system was successfully predicted atother force levels, even in the presence of sig-nificant measurement noise. However, numericaltests show that the force levels for data acquisition

226 Y.H. Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems – part I
Modal amplitude, Q4
ω42
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.22.386
2.388
2.39
2.392
2.394
2.396
2.398
2.4x 10
5
Modal amplitude, Q4b
34
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2-6
-4
-2
0
2
4
6
8x 10
-3
Fig. 8. Noise effect on non-linear modal parameter extraction: Extracted values, −−− Fitted values.
Freq/Hz
Rec
epta
nce
[dB
re
1 m
/N]
76 76.5 77 77.5 78 78.5 79-64
-62
-60
-58
-56
-54
-52
-50
-48
2 1.5 1 0.5 0 0.5 1 1.5 2
x 10-3
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0x 10
-3
Re
Im
Fig. 9. Regeneration from noise-polluted data: HBM simulation, ∗ ∗ ∗∗ Regenerated FRF.
and response calculations must not be more thantwo orders of magnitude apart, though this featureis likely to be case dependent.
– The non-linear modal model can therefore be usedto minimise experimental testing by enabling theanalyst to obtain the response levels under a widerange of forcing conditions. It is also possibleto perform a sub-structure analysis by couplingseveral non-linear components.
– Being based on a modal representation, the tech-nique is particularly well suited to the study oflarge systems. Further numerical studies, not re-
ported here, showed that only a few modes aroundthe resonance of interest were needed to predictthe non-linear contributions. This feature will beexploited when studying a large MDOF system inPart II.
References
[1] S.J. Gifford and G.R. Tomlinson, Recent advances in the ap-plication of functional series to non-linear structures, Journalof Sound & Vibration 135(2) (1989), 289–317.

Y.H. Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems – part I 227
[2] W.D. Iwan, A generalization of the concept of equivalentlinearization, International Journal of Non-linear Mechanics18 (1973), 149–165.
[3] K. Murakami and H. Sato, Vibration characteristics of a beamwith support accompanying clearance, Journal of Vibration,Stress and Reliability in Design 112 (October 1990), 508–514.
[4] H.G. Natke, J.N. Juang and W. Gawronski, A brief review onthe identification of non-linear mechanical systems, Kissim-mee, Florida, Proc. of IMAC 6, 1988, pp. 1569–1574.
[5] H.N. Ozguven and M. Imregun, Complex modes arising fromlinear identification of nonlinear systems, International Jour-nal of Experimental & Analytical Modal Analysis 8(2) (1993),151–164.
[6] H.N. Ozguven, B. Tanrikulu and M. Imregun, M. forcedharmonic response analysis of non-linear structures using de-scribing functions, AIAA Journal 31(7) (1993), 1313–1320.
[7] R.M. Rosenberg, The normal modes of non-linear n degree-of-freedom systems, ASME Journal of Applied Mechanics 82(1962), 7–14.
[8] K.Y. Sanliturk, M. Imregun and D.J. Ewins, Harmonic balance
vibration analysis of turbine blades with friction dampers,ASME Journal of Vibration & Acoustics 118 (1996), 96–103.
[9] S. Setio, H.D. Setio and L. Jezequel, A method of non-linearmodal identification from frequency response tests, Journalof Sound & Vibration 153(3) (1992), 497–515.
[10] S.W. Shaw and C. Pierre, Normal modes of vibration for non-linear continuous systems, Journal of Sound & Vibration 2(1994), 319–347.
[11] W. Szemplinska-Stupnicka, The modified single mode methodin the investigations of the resonant vibrations of non-linearsystems, Journal of Sound & Vibration 63 (1979), 475–489.
[12] W. Szemplinska-Stupnicka, Non-linear normal modes andgeneralized ritz method in the problems of vibrations of non-linear elastic continuous systems, International Journal ofNon-linear Mechanics 18 (1983), 149–165.
[13] G.R. Tomlinson, Linear or non-linear – that is the question,Proc. ISMA 19, KU Leuven, 1992, pp. 11–32.
[14] A.F. Vakakis, Non-linear normal modes and their applicationsin vibration theory: an overview, Mechanical Systems &Signal Processing 11(1) (1997), 3–22.

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttp://www.hindawi.com Volume 2010
RoboticsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Journal ofEngineeringVolume 2014
Submit your manuscripts athttp://www.hindawi.com
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Modelling & Simulation in EngineeringHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
DistributedSensor Networks
International Journal of