Validation of a potential flow code for computation of ...
86
Joris Falter results ship-ship interaction forces with captive model test Validation of a potential flow code for computation of Academiejaar 2009-2010 Faculteit Ingenieurswetenschappen Voorzitter: prof. dr. ir. Julien De Rouck Vakgroep Civiele techniek Master in de ingenieurswetenschappen: werktuigkunde-elektrotechniek Masterproef ingediend tot het behalen van de academische graad van Begeleiders: Carlos Guedes Soares, Serge Sutulo Promotor: prof. dr. ir. Marc Vantorre
Transcript of Validation of a potential flow code for computation of ...
Joris Falter
resultsship-ship interaction forces with captive model testValidation of a potential flow code for computation of
Academiejaar 2009-2010Faculteit IngenieurswetenschappenVoorzitter: prof. dr. ir. Julien De RouckVakgroep Civiele techniek
Master in de ingenieurswetenschappen: werktuigkunde-elektrotechniekMasterproef ingediend tot het behalen van de academische graad van
Begeleiders: Carlos Guedes Soares, Serge SutuloPromotor: prof. dr. ir. Marc Vantorre
i
Preface Ship-ship interaction is a topic which has been discussed various times in the past. The research
performed in previous years is very diverse, showing a lot of very different approaches to, on the
one side prediction methods, and on the other side experimental programs. The target of the
hereby presented thesis was to validate a prediction method designed by Serge Sutulo and Carlos
Guedes Soares at the Instituto Superior Tecnico in Lisbon, Portugal. The validation of this
interaction code was based on towing tank experiments executed by Marc Vantorre, Ellada
Verzhbitskaya (both Ghent University) and Erik Laforce (Flanders Hydraulics). This international
cooperation gave me the unique opportunity to spend one year to write this thesis in Lisbon,
supported by the knowledge and assistance from two universities.
The organisation necessary to do this thesis was not trivial, and therefore I want to give special
thanks to Serge Sutulo, Marc Vantorre and Carlos Guedes Soares to make my investigation, my
studies and my stay in Portugal possible. I also want to thank Xueqian Zhou for his important
contribution in modelling and interpolating the ship’s hullforms.
For me, the realization of this thesis trained me a lot in technical skills, organizational methods and
research which made it a great experience. I hope the results achieved for this thesis will be of a
great help in the further development of the interaction code.

ii
Admission of Use The author gives permission to make this master dissertation available for consultation and to copy
parts of this master dissertation for personal use.
In the case of any other use, the limitations of the copyright have to be respected, in particular with
regard to the obligation to state expressly the source when quoting results from this master
dissertation.
Joris Falter Lisbon 7
th July 2010

iii
Validation of a Potential Flow Code for Computation of Ship-Ship
Interaction Forces with Captive Model Test Results
by
Joris Falter
Dissertation presented to obtain the academic degree of
Master of Electromechanical Engineering
Promoter: Prof. Dr. Ir. Marc Vantorre
Supervisors: Prof. Dr. Serge Sutulo (IST, Lisbon),
Prof. Dr. Carlos Guedes Soares (IST, Lisbon)
Faculty of Engineering
Ghent University
Department of Civil Engineering
President: Prof Dr. Ir. Julien de Rouck
Academic year: 2009-2010
Summary An extensive set of comparisons has been executed in order to validate an online double body
potential flow interaction code based on the Hess & Smith panel method, created by Sutulo and
Guedes Soares at the Instituto Superior Técnico, Lisbon, Portugal. The experimental data was
obtained at Flanders Hydraulics (Antwerp, Belgium) by Vantorre, Verzhbitskaya and Laforce. The
situations investigated are two ship’s encountering or overtaking in shallow water. The two hulls
are parallel, the speed range encloses speeds between 0 and 12 knots. From the four models
used, three have lengths of approximately 290 metres and beams around 40 metres. The fourth
model has a length of 166 metres and a beam of 22 metres. Valuable results are obtained, for
either surge, sway and yaw for the different situations, in dimensionless shape. Besides that,
comparisons are made between calculations in steady and unsteady mode. The hull forms had to
be modelled and interpolated to a certain number of panels. The effect on the accuracy when
changing the number of panels on the ship hulls is also investigated, as well as the effect of
reducing the time step between calculations from one second to half a second. The written text
contains only the most striking results. The whole set of data is available on the enclosed CD.
Key-words: ship-ship interaction, potential-flow estimation, shallow water, double body panel method

iv
Validation of a Potential Flow Code for Computation of Ship-Ship Interaction Forces with Captive Model Test Results
Joris Falter
Supervisors: Prof. Dr. Serge Sutulo, Prof. Dr. Carlos Guedes Soares, Prof. Dr. Ir. Marc Vantorre
I. INTRODUCTION
Ship’s interacting when overtaking or encountering can
affect manoeuvring and course keeping of ships. These
effects are enhanced when the ships are manoeuvring in
shallow water. At the Technical University of Lisbon, a
relatively simple potential double body panel method has
been created. This code allows to do online computations
of interaction forces and moments without limitations on
the hull shapes, positions and motions of the bodies. The
modelling of the hulls is based on the classic Hess and
Smith panel method.
This method has been validated for overtaking and
encountering situations in shallow water, based on the
experimental program from Vantorre et al. (2002). More
then 60 situations were compared for the surge, sway and
yaw forces and moments. Besides this, also a study on the
difference in behaviour in steady and unsteady mode has
been executed, the influence of the number of panels has
been investigated, and the effect of changing the time step.
SYMBOLS
B beam
h water depth
bby clearance between ships
'N dimensionless yaw moment
T draught
'X dimensionless surge force
'Y dimensionless sway force
'ξ dimensionless distance between midships,
increasing with time
II. EXPERIMENTAL DATA
The tests were executed at the Flanders Hydraulics
shallow water towing tank (Antwerp, Belgium), equipped
for this occasion with an auxiliary carriage besides the main
planar motion carriage. The two models were free to heave
and pitch, and the own ship (on which the forces were
measured) was equipped with rudder and propeller running
at self-propulsion point. The different parameters varied
were: the models used, the water depth, the side clearance,
encounter or overtake, the speeds (0, 4, 8 and 12 knots) and
the drafts of the ships.
III. POTENTIAL FLOW INTERACTION CODE
The code only takes the potential flow interaction into
account, in this way neglecting viscous and free-surface
effects. The importance of each of these effects in the total
interaction force is not quite clear. The ship hulls are
doubled with respect to the water plane area, and because
the cases are in shallow water cases additional mirror
images with distance 2h were added. The neglecting of the
surface effects can be especially a problem at higher
speeds (for example, two ships encountering at 12 knots).
However, in the comparisons made, also for these
situations some good results are obtained.
IV. DIMENSIONLESS PARAMETERS
Results for forces and moments are given in the
following dimensionless shape, elaborated by professor
Sutulo:
( )
( )
2 2
1 1 2 2
2 2 2
1 1 2 2
2'
2'
i
i
i i
i
i
i i
FF
L T V V V V
MM
L T V VV V
ρ
ρ
=− +
=− +
(1)
V. SHIP MODELS
Four different ship models were used, scaled with a
factor 1:75. Their properties are displayed in table 1.
Table 1: Model Properties
Ship model C D E H
Ship type Bulk
carrier Container
ship Tanker Small tanker
Lpp m 3.984 3.864 3.824 2.21
B m 0.504 0.55 0.624 0.296
T m 0.18 0.18 0.207 0.125 0.178
CB - 0.843 0.588 0.816 0.796 0.83
The choice for the number of panels is based on the
findings in Sutulo S, Guedes Soares C. and Otzen J. (2010).
The numbers of panels used in the models is higher then in
this paper to obtain more realistic models, and to keep the
risk of errors due to bad modelling small.
The number of panels is shown in table 2.
Table 2: number of panels per model
Model C
Model D
Model E
Model H Own
Model H Target
886 896 932 554 544
The models are shown in figures 1 to 2.
x
y
x
Figure 1: Left: model C; right: model D

v
x
y
x
Figure 2: Left: model E; right: model H
VI. EXPERIMENTAL PARAMETERS
The cases covered are shallow water cases (1.2 < h/T <
1.5) and one very shallow water case (h/T < 1.2) with
respect to the ship with the largest draught.
The coordinate system is a common used, ship fixed
system, independent of the position of the target ship.
• X’: Nondimensional longitudinal force:
Positive if forward
• Y’: Nondimensional lateral force: Positive to
starboard side
• N’: Nondimensional yaw moment: Positive if
clockwise (from sky perspective)
Simulations were always done in this form:
• The own ship takes over the target ship: The target
ship is at port side of the own ship
• The target ship takes over the own ship: The own
ship is at starboard side of the target ship
• Encounter: Both ships are at port side with regard
to each other
VII. RESULTS
Comparisons for 62 situations with the standard
parameters have been done. Not all of them can be plotted
here. Only a few examples are shown. The own ship is the
ship on which the forces are measured. The dimensionless
stagger distance is increasing with time for all manoeuvres.
A. The own ship takes over the target ship
For these situations, the target ship had a speed of 8
knots, the own ship 12 knots. A good result is obtained for
the yaw moment when model H takes over model D, shown
in figure 3. The dashed line (with squares) is the
experimental result, the solid line is the computational
result.
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
N′n
N′e
Figure 3: Yaw moment for model H taking over model D
The analysis of the data is based on visual results. Three
possible classifications for the results are:
• No agreement (X)
• Qualitative agreement: the same shape,
but not the same values (V)
• Quantitative agreement: the same shape and the
same values (VV)
This system is not very strict, and is more adopted here to
give an idea of the results obtained. The results for these
cases are given in table 4.
Table 4: results for the own ship taking over the target ship
surge sway yaw
No. of X 2 14 6
No. of V 11 0 5
No. of VV 1 0 3
Total 14 14 14
B.The target ship takes over the own ship
In most cases, the target ship had a speed of 12 knots, the
own ship 8 knots. Two cases with lower speed are also
present. The surge force for the case when model D gets
overtaken by model H is shown in figure 4.
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
X′n
X′e
Figure 4: Sway force for model D overtaken by model H
Using the same system of visual observation, following
results are obtained (table 5).
Table 5: Results for the own ship taken over by the target ship
Surge Sway yaw
No. of X 3 11 5
No. of V 11 4 8
No. of VV 2 1 3
Total 16 16 16
C. Encounter
There are 32 encounter cases. Most of them show good
results. In figure 5 model E (own ship) encounters model
D, both at 8 knots. The figure shown is the sway force.
The final results are shown in table 6.

vi
Table 6: Results for the encounter cases
surge sway yaw
No. of X 9 6 9
No. of V 13 20 12
No. of VV 10 6 11
Total 32 32 32
ξ′s,n
, ξ′s,e
Y′ n
,Y
′ e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Y′n
Y′e
Figure 5: Sway force for model E encountering model D
D. Steady versus unsteady
All previous examples shown were calculated in the
unsteady mode, since the both ships have a relative speed
with respect to each other. However, when this relative
speed is small, calculations can also be done in unsteady
mode. The difference between both modes is the necessity
to calculate an unsteady term in the Bernouilli equation in
unsteady mode. Some calculations have been done to
compare both modes. In general results show that in
encounter cases, unsteady mode shows a lot less
discrepancies with the experimental results then the steady
mode. For the overtake cases, this is less clear, and
sometimes the steady mode results approximate the
experimental data better then the unsteady mode results.
E. Influence of the number of panels
To check the influence of the number of panels, the hull
forms were stripped down to a lower number. This was
mostly done in the midship section to maintain the
hullforms detailed enough in fore and aft.
Results are shown for the surge force for model E
(0 knots, own ship) overtaken by model D at 12 knots. The
number of panels was stripped down from 900 to 300 for
model E and from 900 to 400 for model D, with more or
less equal steps. As shown in figure 6, the effect is
marginal.
F. Influence of the time step
One comparison has been executed to compare the effect
of the simulation time step, which was reduced from 1
second to half a second. This could have allowed to
calculate the unsteady terms more accurate, but although
the two graphs are not completely the same, the difference
is not very significant.
VIII CONCLUSIONS
Validation of the code for interaction cases between two
ships in shallow water has been executed. Good results
have been obtained, but also larger discrepancies are
present. It is striking that the potential flow code calculates
in general very symmetric results, either around the origin
or around the vertical axis. The experimental results are not
always symmetric, meaning that discrepancies are almost
always present when this is not the case.
ξ′s
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Exp
1E0D
1E1D2E2D
3E3D
4E4D
5E5D6E6D
Figure 6: Surge force for model E overtaken by model D,
7 situations with a different number of panels.
Possible reasons for the discrepancies are the freedom in
pitch and heave in the experiments, or the propeller
attached to the own ship. However, some results with a
speed of 0 knots for the own ship don’t confirm this theory.
An other possibility is the influence of the bottom. Results
have been compared for three equal cases with different
water depth, showing that especially for sway and yaw
results are better at larger depths.
A third option are the viscous effects which are not taken
into account. Small horizontal clearance can have an effect
on this (Sutulo, Guedes Soares and Otzen (2010)) but when
comparing results from situations were all parameters
except the clearance, it shows no trends which can either
confirm or deny this theory.
To calculate the influence of these effects, more
sophisticated interaction codes are necessary, however, the
speed obtained with this potential flow code is then lost.
REFERENCES
SUTULO, S.; GUEDES SOARES, C. (2008), Simulation of the Hydrodynamic Interaction Forces in Close-Proximity Manoeuvring, Proceedings of the 27
th Annual International Conference on
Offshore Mechanics and Arctic Engineering (OMAE 2008), Estoril, Portugal.
SUTULO, S.; GUEDES SOARES, C. (2009), Simulation of Close-Proximity Maneuvres Using an Online 3D Potential Flow Method, Proceedings of International Conference on Marine Simulation and Ship Manoeuvrability MARSIM 2009, Panama City, Panama
SUTULO, S.; GUEDES SOARES, C.; OTZEN J. (2010), validation of potential-flow estimation of interaction forces acting upon ship hulls in side-to-side motion at low Froude number, submitted for publication
VANTORRE, M.; LAFORCE, E; VERZHBITSKAYA, E (2002), Model test based formulations of ship-ship interaction forces, Ship Technology Research Vol. 49 – 2002

vii
Dutch Summary
Validatie van een potentiaal-stroom code voor de berekening van schip-schip interactiekrachten op basis van resultaten van
modelproeven Originele titel: Validation of a Potential Flow Code for Computation of Ship-Ship Interaction Forces with
Captive Model Test Results
Door: Joris Falter
Promotor: Prof. Dr. Ir. Marc Vantorre
Begeleiders: Prof. Dr. Carlos Guedes Soares, Prof. Dr. Serge Sutulo
1. Inleiding
De interactie tussen schepen die elkaar kruisen of inhalen kan het manoeuvreren en koers
houden van deze schepen danig beïnvloeden. Deze effecten worden nog eens versterkt wanneer
de schepen in ondiep water manoeuvreren. Sutulo en Guedes Soares (2008) hebben aan de
Technische Universiteit van Lissabon (Universidade Técnica de Lisboa – UTL) een relatief
simpele paneel methode ontwikkeld, waarbij gebruik gemaakt wordt van een verdubbeld lichaam.
Deze code laat toe om in real-time de interactiekrachten en -momenten te berekenen, zonder
beperking op de vorm van de lichamen, de posities en de bewegingen. De modellering van de
lichamen is gebaseerd op de klassieke Hess en Smith paneel methode.
Methodes die het gedrag van schepen voorspellen die kort bij elkaar varen zijn reeds eerder
ontworpen, voor zeer uiteenlopende situaties. Enerzijds zijn er de empirische methodes
gebaseerd op experimentele resultaten. Anderzijds zijn er de methodes die gebaseerd zijn op de
(gesimplificeerde) fysische processen. Een voorbeeld van die laatste zijn onder andere de
potentiaal-stroom theorie, of de slender-body theorie. Abkowitz e.a. (1976) hebben een dergelijke
slender-body theorie ontwikkeld voor twee lichamen in diep water. Ook Tuck and Newman (1984)
hebben de scheepsvorm benaderd als een rank profiel. Daarnaast verwaarloosden zij ook de
oppervlakteverschijnselen door te veronderstellen dat het Froude nummer nul is. Het
verwaarlozen van de oppervlakteverschijnselen is daarna nog opnieuw gedaan door Korsmeyer
e.a. (1993) die voor de eerste keer de Hess & Smith paneel methode gebruikten voor het
modelleren van de scheepsromp, een methode die voordien voornamelijk gebruikt werd in de
luchtvaart. Vantorre e.a. (2002) is een typisch voorbeeld van een empirische methode,
gebaseerd op een uitgebreid experimenteel programma over interactie tussen twee parallelle
schepen die mekaar kruisen en inhalen in ondiep water.
Met het opkomen van krachtigere computers werd geprobeerd meer effecten in rekening te
brengen. Pinkster (2004) gebruikte ook een potentiaal-stroom theorie, maar maakte wel een
aanpassing om de golfeffecten in rekening te brengen. Een van zijn resultaten was dat in ondiep
water de oppervlakteverschijnselen van groter belang zijn. Huang and Chen (2006) gaan een
hele stap verder en ontwikkelden een CFD (computational fluid dynamics – berekende vloeistof

viii
dynamica) code gebaseerd op de Navier-Stokes vergelijkingen. Deze methodes laten accurate
resultaten toe, en kunnen de verschillende verschijnselen die optreden in rekening brengen, maar
zijn tijdrovend en vereisen krachtige computers. Het verschil met dit type methodes en de
potentiaal-stroom methode van Sutulo and Guedes Soares (2008) is dat deze laatste een relatief
simpele code is, die toelaat snel tot resultaten te komen. Iets wat bijvoorbeeld vereist is voor een
typische simulator op de brug.
Deze potentiaal-stroom methode is gevalideerd geworden voor situaties in ondiep water voor
schepen die elkaar kruisen en inhalen. 62 verschillende situaties werden gesimuleerd en
vergeleken met de experimentele data uit Vantorre e.a. (2002). Het vergelijken van de
experimentele data met de resultaten van de interactiecode is gebeurd voor de schrik- en
verzetkrachten en voor het giermoment. Daarnaast is er een studie uitgevoerd naar het verschil
in gedrag wanneer de code uitgevoerd wordt in tijdsafhankelijke of niet tijdsafhankelijke modus,
wat een belangrijk verschil inhoudt in het berekenen van de Bernouilli-vergelijking. De schepen
waren gemodelleerd met panelen, waarbij een groter aantal panelen een nauwkeuriger resultaat
gaf, maar ook een toename van de rekentijd. Door het aantal panelen van de modellen te
variëren is geprobeerd een goed evenwicht te vinden tussen tijd en nauwkeurigheid. Ten slotte is
voor een specifieke situatie kort de invloed onderzocht van het aanpassen van het tijdsinterval
tussen twee opeenvolgende berekeningen. Ook hier was het mogelijk dat een korter interval
aanleiding gaf tot nauwkeuriger berekeningen, maar ook tot een toename van de rekentijd.
Symbolen
B Breedte
h Water diepte
bby Transverse afstand tussen schepen (van romp tot romp)
'N Dimensieloos giermoment
T Diepgang
'X Dimensieloze schrikkracht
'Y Dimensieloze verzetkracht
'ξ Dimensieloze afstand tussen het middenschip van beide schepen, toenemend met de tijd
2. Experimentele data
De experimenten werden uitgevoerd in de Flanders Hydraulics shallow water towing tank in
Antwerpen. Deze was, naast de hoofd-aandrijfkar, ook met een hulp-aandrijfkar uitgerust om het
tweede schip te kunnen bevestigen. Beide schepen waren vrij in de domp- en stampbeweging.
Het eigen schip (het schip bevestigd aan de hoofd-aandrijfkar en op hetwelk de krachten gemeten
werden) was daarnaast ook uitgerust met een roer en een propeller, die draaide in zijn zelf-
propulsiepunt. Het doelschip (bevestigd aan de hulp-aandrijfkar) was hiermee niet uitgerust. De
variable parameters van de ter beschikking gestelde data waren: het gebruikte model (vier
verschillende scheepsmodellen), de waterdiepte, de transverse afstand tussen de schepen,

ix
inhalen of kruisen, de snelheid (0, 4,8 of 12 knopen) en de diepgang van de schepen. De
schepen waren altijd parallel ten opzichte van elkaar.
De krachten waren opgeschaald volgens de wet van Froude. Voor de krachten werd dit:
Fship = λρ λL3 (2.1)
En voor de momenten:
Mship = λρ λL4 (2.2)
Waarin λL de schaalfactor naar lengte is en λρ een schaalfactor naar de waterdichtheid:
λL = 75 (2.3)
λρ = 1 (2.4)
3. Interactiecode
De interactiecode is gebaseerd op de potentiaal-stroom theorie, wat betekent dat de viskeuze en
de oppervlakte-effecten niet in rekening gebracht worden. In welke mate deze effecten bijdragen
tot de totale interactiekracht is echter niet duidelijk.
De scheepsromp wordt gespiegeld rond het wateroppervlak. Op deze manier vervalt de
grensvoorwaarde van het vrije oppervlak, omdat het wateroppervlak nu als symmetrievlak
fungeert. Deze grensvoorwaarde vereist echter lage Froude getallen, en zou bij hogere
snelheden (bijvoorbeeld een kruismanoeuvre tussen twee schepen die varen aan 12 knopen)
problematisch kunnen zijn. Er is echter vastgesteld dat ook voor deze situaties goede resultaten
verkregen worden. Daarnaast is er een grensvoorwaarde op de scheepsromp die niet toelaat dat
het water door de scheepsromp penetreert. In het geval dat de waterdiepte beperkt is door een
horizontale bodem, moet ook hier een grensvoorwaarde vastgelegd worden. Dit wordt gedaan
door de dubbele scheepsromp te spiegelen rond de horizontale bodems aan weerszijden van de
dubbele scheepsromp. Door dit een oneindig aantal keren te doen is nu ook het bodemvlak een
symmetrievlak, en kan er dus geen water door penetreren. In de praktijk is gebleken dat na vier
afspiegelingen aan beide zijden de reeks reeds mocht afgebroken worden (Sutulo and Guedes
Soares 2008), zie figuur 1.
Bij de initialisatie van het programma moeten een aantal belangrijke parameters ingegeven
worden. De algemene parameters zijn: het aantal lichamen, in tijdsafhankelijke modus of niet in
tijdsafhankelijke modus, de totale simulatietijd, het tijdsinterval tussen de berekeningen en de
snelheid van het water indien het stromend water is. Voor elk lichaam moet een
geometriebestand gemaakt worden, dat het lichaam in secties, en vervolgens in coördinaten per

x
sectie verdeelt. Voor elk lichaam moeten vervolgens de initiële positie, de initiële snelheid en de
versnelling gegeven worden, volgens twee lineaire coördinaten, en voor de gierbeweging.
Figuur 1: Een verdubbelde scheepsromp (de middelste) met twee afspiegelingen aan beide zijden
Het verschil tussen een tijdsafhankelijke en tijdsonafhankelijke berekening zit in de Bernouilli
vergelijking:
( )2 21
2r pp V V
t
φρ
∂ = − + − ∂
(3.1)
Indien een berekening in tijdsonafhankelijke modus wordt uitgevoerd moet de verstorings-
potentiaal φ niet berekend worden. Tijdsonafhankelijke berekeningen kunnen echter ook gebruikt
worden wanneer de relatieve snelheden van de lichamen ten opzichte van elkaar klein zijn, wat
resulteert in snellere berekeningen maar een lagere nauwkeurigheid.
Daarnaast zijn er een aantal hard gecodeerde parameters: de waterdiepte, de massadichtheid
van het water en het aantal afspiegelingen.
De code genereert na afloop van de berekeningen een “force” bestand, dat de krachten en
momenten op en de positie van alle lichamen weergeeft voor elke tijdsstap, en een “added mass”
bestand dat de toegevoegde massa bevat van de lichamen. Daarnaast was het ook mogelijk om
de code een driedimensionaal model van de lichamen te laten genereren om te plotten in Tecplot.

xi
4. Dimensieloze parameters
Om het schaaleffect te elimineren en om verschillende situaties met elkaar te kunnen vergelijken
zijn de experimentele en computerberekende resultaten dimensieloos gemaakt. De keuze van
geschikte formules is echter niet banaal, wanneer er meer dan één schip betrokken is. Zo is het
bijvoorbeeld belangrijk de snelheid van beide schepen te betrekken in de formules, daar beide
een rol spelen. Mogelijkheden werden gezocht in de beschikbare literatuur, maar hadden vaak
slechts betrekking op de snelheid van één van de schepen, of vermenigvuldigden beide
snelheden simpelweg, wat problemen oplevert als één van de snelheden nul is. Een
verdienstelijke poging is die van Brix (1993), waarin zowel van de snelheid, als van de lengte als
van de diepgang van beide schepen een gemiddelde werd genomen. De uiteindelijk gebruikte
formules werden voorgesteld door professor Sutulo:
( ) ( )2 2 2 2 2
1 1 2 2 1 1 2 2
2 2' , 'i i
i i
i i i i
F MF M
LT V VV V L T V VV Vρ ρ= =
− + − + 1,2i = (4.1)
Deze formules gebruiken de lengte en de diepgang van het eigen schip, maar de snelheden van
beide schepen. Ze geven een goed resultaat voor de snelheid in de situaties wanneer één van
beide schepen stilligt en wanneer beide even snel gaan. In het eerste geval wordt de snelheid van
het andere schip gekwadrateerd, in het andere geval de snelheid van beide schepen. Op die
manier zijn deze formules identiek aan de dimensieloze formules voor één schip.
De Froude nummers, gebaseerd op de lengte van het schip en de waterdiepte zijn dan als volgt:
2 2 2 2
1 1 2 2 1 1 2 2,i hi
i
V VV V V VV VFn Fn
gL gh
− + − += = 1,2i = (4.2)
De longitudinale en transverse afstanden tussen respectievelijk het midscheepse gedeelte van
beide schepen en de longitudinale symmetrievlakken van beide zijn de standaard formules:
( ) ( )1 2 1 2
1 2 1 2
2 2' , '
L L B B
ξ ξ η ηξ η
− −= =
+ + (4.3)
Alle resultaten die verderop besproken worden en die op de CD staan zijn gebaseerd op de
voorgaande formules. De gebruikte massadichtheid is die van zout water.
xii
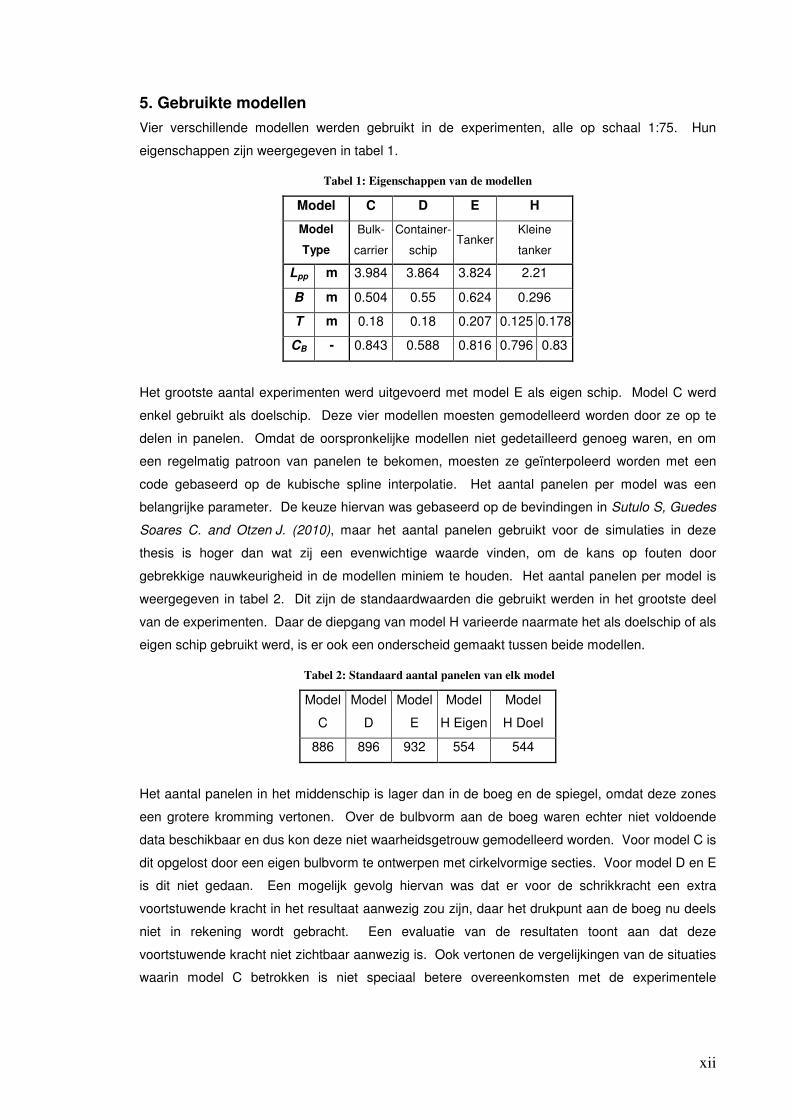
5. Gebruikte modellen
Vier verschillende modellen werden gebruikt in de experimenten, alle op schaal 1:75. Hun
eigenschappen zijn weergegeven in tabel 1.
Tabel 1: Eigenschappen van de modellen
Model C D E H
Model
Type
Bulk-
carrier
Container-
schip Tanker
Kleine
tanker
Lpp m 3.984 3.864 3.824 2.21
B m 0.504 0.55 0.624 0.296
T m 0.18 0.18 0.207 0.125 0.178
CB - 0.843 0.588 0.816 0.796 0.83
Het grootste aantal experimenten werd uitgevoerd met model E als eigen schip. Model C werd
enkel gebruikt als doelschip. Deze vier modellen moesten gemodelleerd worden door ze op te
delen in panelen. Omdat de oorspronkelijke modellen niet gedetailleerd genoeg waren, en om
een regelmatig patroon van panelen te bekomen, moesten ze geïnterpoleerd worden met een
code gebaseerd op de kubische spline interpolatie. Het aantal panelen per model was een
belangrijke parameter. De keuze hiervan was gebaseerd op de bevindingen in Sutulo S, Guedes
Soares C. and Otzen J. (2010), maar het aantal panelen gebruikt voor de simulaties in deze
thesis is hoger dan wat zij een evenwichtige waarde vinden, om de kans op fouten door
gebrekkige nauwkeurigheid in de modellen miniem te houden. Het aantal panelen per model is
weergegeven in tabel 2. Dit zijn de standaardwaarden die gebruikt werden in het grootste deel
van de experimenten. Daar de diepgang van model H varieerde naarmate het als doelschip of als
eigen schip gebruikt werd, is er ook een onderscheid gemaakt tussen beide modellen.
Tabel 2: Standaard aantal panelen van elk model
Model
C
Model
D
Model
E
Model
H Eigen
Model
H Doel
886 896 932 554 544
Het aantal panelen in het middenschip is lager dan in de boeg en de spiegel, omdat deze zones
een grotere kromming vertonen. Over de bulbvorm aan de boeg waren echter niet voldoende
data beschikbaar en dus kon deze niet waarheidsgetrouw gemodelleerd worden. Voor model C is
dit opgelost door een eigen bulbvorm te ontwerpen met cirkelvormige secties. Voor model D en E
is dit niet gedaan. Een mogelijk gevolg hiervan was dat er voor de schrikkracht een extra
voortstuwende kracht in het resultaat aanwezig zou zijn, daar het drukpunt aan de boeg nu deels
niet in rekening wordt gebracht. Een evaluatie van de resultaten toont aan dat deze
voortstuwende kracht niet zichtbaar aanwezig is. Ook vertonen de vergelijkingen van de situaties
waarin model C betrokken is niet speciaal betere overeenkomsten met de experimentele

xiii
resultaten dan de situaties waarin model D of model E betrokken is. Model H had geen bulbvorm
aan de boeg en had dus ook dit probleem niet.
De modellen met hun standaard aantal panelen zijn getoond in figuren 2 en 3.
x
y
x
Figuur 2: Links: Model C; Rechts: Model D
x
y
x
Figuur 3: Links: Model E; Rechts: Model H (eigen schip versie)

xiv
6. Parameters van de experimenten en de interactie code
6.1 Waterdieptes
De waterdieptes die gehanteerd werden in de experimenten zijn weergegeven in tabel 3. De
cijfers onder de modellen verwijzen naar de diepgang van de schepen. De cijfers in de tabel
verwijzen naar de waterdiepte.
Tabel 3: Standaarddiepgangen T van het eigen en het doelschip. De cijfers in de tabel verwijzen naar de
standaardwaterdiepte h (in het vet)
EIGEN T0
D E H
13.5 15.53 13.35 D
OE
L T
t
C
13.5 17.08 18.63 17.08 D
13.5 X
17.08
18.63 18.63
23.04
E
15.53 18.63 X 18.63
H
9.38 17.08 18.63 X
6.2 Assenstelsels
Het gebruikte assenstel is vastgemaakt aan het eigen schip. Het is onafhankelijk van de positie
van het doelschip.
• X’: Dimensieloze voorwaartse kracht: Positief indien voorwaarts
• Y’: Dimensieloze zijwaartse kracht: Positief naar de stuurboord zijde
• N’: Dimensieloos gier moment: Positief indien in klokwijzer-zin (uit vogel perspectief)
De simulaties werden gedaan op volgende manier:
• Het eigen schip haalt het doelschip in: Het doelschip bevindt zich aan de bakboordzijde
van het eigen schip
• Het doelschip haalt het eigen schip in: Het doelschip passeert aan de bakboordzijde van
het eigen schip
• Kruisen: Het kruisende schip bevindt zich aan de bakboordzijde van het eigen schip
De situaties zijn samengevat in figuur 4. De simulaties zijn op deze manier gedaan om de
assenstelsels van de experimentele resultaten en van de interactiecode te doen samenvallen.
6.3 Aantal afspiegelingen
Het aantal afspiegelingen is vastgelegd op vier voor alle simulaties die uitgevoerd werden voor
deze thesis.
6.4 Tijdstap
Het tijdsinterval tussen opeenvolgende berekeningen was vastgelegd op 1 seconde, zowel voor
de kruis- als voor de inhaalmanoeuvres. Deze keuze is gemaakt om een goed evenwicht te
vinden tussen rekentijd en nauwkeurigheid. De totale ingestelde simulatietijd van een
inhaalmanoeuvre was, afhankelijk van de snelheden van de schepen, ongeveer 500 seconden,
en van een kruismanoeuvre ongeveer 250 seconden.

xv
Figuur 5: Links: Het eigen schip (Own) haalt het doelschip (Target) in
Midden: Het doelschip (Target) haalt het eigen schip (Own) in
Rechts: Kruisen van het doelschip (Target) en het eigen schip (Own)
7. Resultaten van de vergelijkingen
62 Simulaties zijn uitgevoerd met de standaardparameters en in tijdsafhankelijke modus.
Vervolgens zijn er nog enkele vergelijkingen gemaakt tussen tijdsafhankelijke en
tijdsonafhankelijke modus, met een verschillend aantal panelen voor de modellen en met een
kleinere tijdstap. Deze konden niet allemaal grafisch weergegeven worden in de volledige tekst.
De meerderheid van de resultaten is dus enkel beschikbaar op de bijgevoegde CD.
De schepen waren altijd parallel ten opzichte van elkaar. De transverse afstanden ybb tussen
beide scheepsrompen waren meestal de helft van de breedte van het doel of van het eigen schip.
Enkele experimenten met kleinere en grotere afstanden werden ook uitgevoerd en zijn bijgevolg
ook gesimuleerd met de interactiecode. De gebruikte waterdieptes waren volgens de ITTC: één
“zeer ondiep water” situatie (h/T < 1.2) en de rest “ondiep water” situaties (1.2 < h/T < 1.5) met
betrekking tot het schip met de grootste diepgang.
De resultaten zijn niet op een wiskundige manier vergeleken. Om toch een evaluatie te kunnen
maken is een onderverdeling gemaakt in drie subcategorieën, gebaseerd op de visuele
resultaten:
• Geen overeenkomst (symbool: X)
• Kwalitatieve overeenkomst: de grafieken vertonen een gelijkaardig verloop qua vorm,
maar de waarden komen niet overeen (symbool: V)
• Kwantitatieve overeenkomst: de grafieken zijn gelijkaardig, zowel qua vorm als qua
waarden (symbool: VV)

xvi
Deze onderverdeling is subjectief en mag dus ook niet als een absoluut resultaat geïnterpreteerd
worden. Ze dient meer om zich een idee te vormen van de behaalde resultaten. Om deze reden
zijn er ook slechts drie onderverdelingen.
In alle grafieken die verderop worden weergegeven is de horizontale as de dimensieloze afstand
ξ’ en de verticale as de dimensieloze kracht of moment. Het subscript “n” staat voor de resultaten
van de interactiecode (volle lijn). Het subscript “e” voor de experimentele resultaten (streepjeslijn
met vierkantjes).
7.1 Het eigen schip haalt het doelschip in
In de uitgevoerde simulaties had het eigen schip altijd een snelheid van 12 knopen, en het
doelschip een snelheid van 8 knopen. In het totaal zijn er 14 verschillende situaties vergeleken.
Een goed resultaat is bekomen wanneer model H model D inhaalt (figuur 6), met standaard
waterdiepte en met een transverse afstand tussen beide schepen die de helft is van de breedte
van model D.
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
X′nX′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Y′nY′
e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
N′nN′
e
Figuur 6: Model H haalt model D in; Links: Schrikkracht; Midden: Verzetkracht; Rechts: Giermoment
De resultaten voor alle 14 situaties zijn weergegeven in tabel 4 volgens het eerder vermelde
systeem. Enkele trends zijn dat voor het verzetten de resultaten altijd slecht zijn. Dit is ook in
figuur 6 het geval. Voor schrikken en voor gieren zijn er enkele goede resultaten behaald.
Opmerkelijk is dat goede resultaten voornamelijk behaald worden indien het kleinere model H het
eigen schip is, zie hiervoor de resultaten op de CD.
Tabel 4: Evaluatie van de vergelijkingen voor het eigen schip dat het doelschip inhaalt
Schrikken Verzetten Gieren
Aantal X 2 14 6
Aantal V 11 0 5
Aantal VV 1 0 3
Totaal 14 14 14
7.2 Het doelschip haalt het eigen schip in
Voor deze situaties zijn er 16 simulaties vergeleken met de experimentele resultaten. In de
meerderheid van de situaties vaarde het eigen schip aan 8 knopen, en het doelschip aan 12
knopen. Slechts in twee gevallen had het eigen schip een lagere snelheid (respectievelijk 4 en 0
knopen). In figuur 7 is een situatie getoond met goede resultaten, namelijk model H dat model D

xvii
inhaalt, met standaardwaterdiepte en met een transverse afstand tussen beide die de helft van de
breedte van model D is.
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.06
-0.04
-0.02
0
0.02
0.04 X′nX′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
Y′nY′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.06
-0.04
-0.02
0
0.02
0.04
N′nN′
e
Figuur 7: Model H wordt ingehaald door model D; Links: Schrikkracht; Midden: Verzetkracht; Rechts:
Giermoment
De resultaten voor deze situaties zijn samengevat in tabel 5. Betere resultaten zijn behaald dan
wanneer het eigen schip het doelschip inhaalt, zowel voor de schrikkracht, de verzetkracht als het
giermoment. Het aantal goede overeenkomsten in de verzetkracht blijft echter miniem. Opnieuw
is opvallend dat situaties waarin het model H betrokken is, merkelijk betere resultaten vertonen
(zie de bijgevoegde CD).
Tabel 5: Evaluatie van de vergelijkingen voor het doelschip dat het eigen schip inhaalt
Schrikken Verzetten Gieren
Aantal X 3 11 5
Aantal V 11 4 8
Aantal VV 2 1 3
Totaal 16 16 16
7.3 Kruisen
De 32 situaties waarin de twee schepen elkaar kruisen zijn zeer divers wat betreft snelheid. In
het merendeel van de situaties vaart één van beide of alle twee aan 12 of 8 knopen. In sommige
situaties is de snelheid van één van de schepen 4 of 0 knopen. Figuur 8 toont de resultaten voor
het kruisen van model E (eigen schip) met model D, beide aan 8 knopen, de situatie met de
grootste overeenkomsten van de kruismanoeuvres.
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.02
0
0.02
0.04
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
N′nN′
e
Figuur 8: Model E (eigen schip) kruist model D; Links: Schrikkracht; Midden: Verzetkracht; Rechts:
Giermoment

xviii
Eén van de problemen die optreden bij de kruismanoeuvres is dat de verschillen tussen de
experimentele resultaten en de resultaten van de interactiecode groot zijn wanneer de
interactiekrachten klein zijn. Dit is het geval wanneer de transverse afstand tussen beide
schepen groot is, of wanneer het doelschip een snelheid van 0 knopen heeft. Deze twee situaties
buiten beschouwing gelaten, kan geconcludeerd worden dat de kruissituaties veel betere
resultaten vertonen dan de inhaalsituaties, zoals valt af te lezen uit tabel 6. Een mogelijke reden
hiervoor is het Strouhal nummer, dat veel lager is voor een kruismanoeuvre (als de relatieve
snelheid tussen beide schepen als karakteristieke snelheid gekozen wordt) zodat de viskeuze
effecten minder belangrijk zijn (Sobey, 1982).
Tabel 6: Evaluatie van de vergelijkingen voor het kruisen van het eigen schip en het doelschip
Schrikken Verzetten Gieren
Aantal X 9 6 9
Aantal V 13 20 12
Aantal VV 10 6 11
Totaal 32 32 32
7.4 Tijdsafhankelijk contra tijdsonafhankelijk
Omdat de schepen in voorgaande situaties altijd een relatieve snelheid hebben ten opzichte van
elkaar, zijn alle simulaties uitgevoerd in tijdsafhankelijke modus. Wanneer de relatieve snelheid
tussen beide klein is, is het ook mogelijk om de simulaties in tijdsonafhankelijke modus te
berekenen. Enkele simulaties zijn uitgevoerd om beide te vergelijken:
• Model H (eigen schip) kruist model C, beide aan 8 knopen
• Model H (eigen schip) wordt ingehaald door model C, aan respectievelijk 8 en 12 knopen
• Model E (eigen schip) haalt model D in, aan respectievelijk 12 en 8 knopen
ξ′s,unst
, ξ′s,e
, ξ′s,st
N'
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
SteadyExperimentalUnsteady
ξ′s,unst
, ξ′s,e
, ξ′s,st
N'
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
SteadyExperimentalUnsteady
ξ′s,unst
, ξ′s,e
, ξ′s,st
N'
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
SteadyExperimentalUnsteady
Figuur 9: Tijdsafhankelijk contra tijdsonafhankelijk; links: kruis manoeuvre; Midden: het eigen schip ingehaald
door het doelschip; Rechts: het eigen schip haalt het doelschip in
[Steady = tijdsonafhankelijk; Experimental = Experimenteel; Unsteady = tijdsafhankelijk]
Voor het kruismanoeuvre is de tijdsafhankelijke modus duidelijk beter dan de tijdsonafhankelijke.
Wanneer het eigen schip ingehaald wordt is dit ook nog altijd het geval, maar het verschil tussen
tijdsafhankelijk en tijdsonafhankelijk is duidelijk veel kleiner. Wanneer het eigen schip het
doelschip inhaalt benadert de tijdsonafhankelijke modus het experimentele resultaat beter,
hoewel ook hier de verschillen klein zijn.

xix
7.5 Invloed van het aantal panelen
De verschillende modellen werden gereduceerd in aantal panelen om de invloed hiervan op de
nauwkeurigheid te onderzoeken. Van elk model werden vier tot zes nieuwe versies gemaakt met
een verschillend aantal panelen. Het aantal panelen werd gereduceerd van ongeveer 900 tot 400
voor model E en D en van ongeveer 700 tot ongeveer 300 voor model H. Het grootste aantal
panelen werd verwijderd uit het midscheeps gedeelte. Het aantal panelen in de boeg en de
spiegel werd slechts weinig gereduceerd om een gedetailleerd model te behouden. Drie
verschillende situaties werden gesimuleerd met deze nieuwe modellen, situaties waarvoor met de
standaardmodellen reeds goede overeenkomsten waren behaald:
• Model E (eigen schip) aan 0 knopen, ingehaald door model D aan 12 knopen
• Model H (eigen schip) aan 8 knopen, ingehaald door model D aan 12 knopen
• Model E (eigen schip) aan 4 knopen, kruisend met model D aan 8 knopen
De schrikkrachten voor deze drie situaties worden getoond in figuur 10. Het verschil in
nauwkeurigheid is marginaal. De legendes vermelden nummers van 0 tot en met 6, waarbij 0
voor het model met het grootst aantal panelen staat, en 6 voor het kleinste aantal. Het model met
het standaard aantal panelen heeft nummer 1.
ξ′s
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Exp1E0D
1E1D2E2D3E3D4E4D5E5D
6E6D
ξ′s
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
Exp1H0D1H1D3H3D4H4D5H6D
ξ′s
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Exp1E1D2E2D3E3D4E4D
Figuur 10: Effect van de reductie van het aantal panelen; links: model E ingehaald door model D; Midden:
Model H ingehaald door model D; Rechts: Model E kruist model D
7.6 Invloed van het tijdsinterval
Een situatie aan hoge snelheid en met korte transverse afstand tussen beide schepen kan grote
verschillen vertonen indien het tijdsinterval gereduceerd wordt. Daarom werd een
kruismanoeuvre tussen model D (eigen schip) en model H gekozen, beide aan 12 knopen en met
een transverse afstand van 11,1 meter. Het tijdsinterval werd gereduceerd van 1 seconde naar
een halve seconde. In figuur 11 is echter te zien dat er geen grote verschillen optreden.
8. Conclusies
Uit de verschillende resultaten zijn bepaalde besluiten te trekken. Een eerste is dat de resultaten
van de interactiecode in veel gevallen zeer symmetrisch zijn, ofwel rond de oorsprong, ofwel rond
de verticale as. Deze symmetrie is niet altijd terug te vinden in de experimentele resultaten, en
leidt zo tot discrepanties tussen beide. Een mogelijke oorzaak voor deze discrepanties zijn de
verschillen tussen de experimentele opstelling en de interactiecode. Zo waren de schepen vrij om
te dompen en te stampen in de experimenten, maar was het niet mogelijk dit te simuleren in de

xx
interactiecode. Daarnaast bezat het eigen schip een roer en een propeller in de experimenten,
die niet in rekening gebracht werden in de simulaties. Het effect van de propeller kan onderzocht
worden omdat twee van de situaties uit de beschikbare vergelijkingen niet lijden onder dit
probleem, namelijk wanneer het eigen schip een snelheid van 0 knopen heeft. Het vergelijken
van deze situaties met identieke situaties, maar waarin het eigen schip een snelheid van 4 of 8
knopen heeft, levert geen uitsluitsel op over het effect van het roer (Appendix I).
ξ′s
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.015
-0.01
-0.005
0
0.005
0.01
0.015
1 second
Experimental
1/2 Second
ξ′s
Y'
-1.5 -1 -0.5 0 0.5 1 1.5-0.15
-0.1
-0.05
0
0.05
0.11 secondExperimental
1/2 Second
ξ′s
N'
-1.5 -1 -0.5 0 0.5 1 1.5-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
1 second
Experimental
1/2 Second
Figuur 11: Kruis manoeuvre tussen model D en model H, met gereduceerd tijdsinterval; Links: schrikkracht;
Midden: Verzetkracht; Rechts: Giermoment
Een ander belangrijk verschil zijn de oppervlakte-effecten. Er waren experimentele data
beschikbaar van drie kruismanoeuvres waarin behalve de waterdiepte alle andere parameters
identiek zijn. De vergelijkingen tonen aan dat, vooral voor de verzetkracht en het giermoment, de
verschillen tussen de experimentele resultaten en de resultaten van de interactiecode kleiner
worden wanneer de waterdiepte toeneemt (Appendix II).
Een derde mogelijkheid zit in het verwaarlozen van de viscositeit. Sutulo, Guedes Soares en
Otzen (2010) vermelden dat dit mogelijk gevolgen heeft bij kleine transverse afstand. Er zijn
verschillende situaties beschikbaar waarbij deze afstand systematisch gevarieerd wordt. Maar de
vergelijkingen tussen de experimentele data en de resultaten van de interactiecode kunnen geen
uitsluitsel geven over de invloed van de transverse afstand.
De resultaten van de interactiecode komen dus slechts ten dele overeen met de experimentele
data. Meer onderzoek zal moeten verricht worden om deze resultaten te bevestigen, om de code
in andere domeinen te valideren (bijvoorbeeld diep water) en om de trends die in deze thesis aan
het licht gekomen zijn verder te onderzoeken, en het domein waarin ze geldig zijn verder af te
bakenen.
Referenties
ABKOWITZ, M.A.; ASHE, G.M.; FORTSON, R.M. (1976), Interaction effects of ships operating in proximity in deep and shallow water, 11
th ONR symposium on naval hydrodynamics, London
BRIX, J. (1993), Manoeuvring Technical Manual, Seehafen Verlag, Hamburg HUANG, E.T.; CHEN, H-C (2006), Passing ship effects on moored vessels at piers, Proceedings prevention first 2006 symposium, Long Beach, California
ITTC: Final report and recommendations to 23rd
ITTC of the manoeuvring committee.

xxi
PINKSTER (2004), The influence of a free surface on passing ship effects, International Shipbuilding Progress, Vol. 51, No. 4 SOBEY, I. (1982), Oscillatory flows at intermediate Strouhal number in asymmetry channels, Journal of Fluid Mechanics 125 SUTULO, S.; GUEDES SOARES, C. (2008), Simulation of the Hydrodynamic Interaction Forces in Close-Proximity Manoeuvring, Proceedings of the 27
th Annual International Conference on
Offshore Mechanics and Arctic Engineering (OMAE 2008), Estoril, Portugal. SUTULO, S.; GUEDES SOARES, C. (2009), Simulation of Close-Proximity Maneuvres Using an Online 3D Potential Flow Method, Proceedings of International Conference on Marine Simulation and Ship Manoeuvrability MARSIM 2009, Panama City, Panama SUTULO, S.; GUEDES SOARES, C.; OTZEN J. (2010), validation of potential-flow estimation of interaction forces acting upon ship hulls in side-to-side motion at low Froude number, submitted for publication TUCK E.O.; NEWMAN J.N. (1974), Hydrodynamic Interactions between Ships, Proc. 10
th
Symposium on Naval Hydrodynamics, Cambridge, Mass., USA VANTORRE, M.; LAFORCE, E; VERZHBITSKAYA, E (2002), Model test based formulations of ship-ship interaction forces, Ship Technology Research Vol. 49 – 2002 VARYANI, K.S.; VANTORRE, M. (2005), Development of New Generic Equation for Interaction Effects on A Moored Container Ship Due to Passing Bulk Carrier, Vol. 147, IJMW Part A2, June 2005 11
xxii
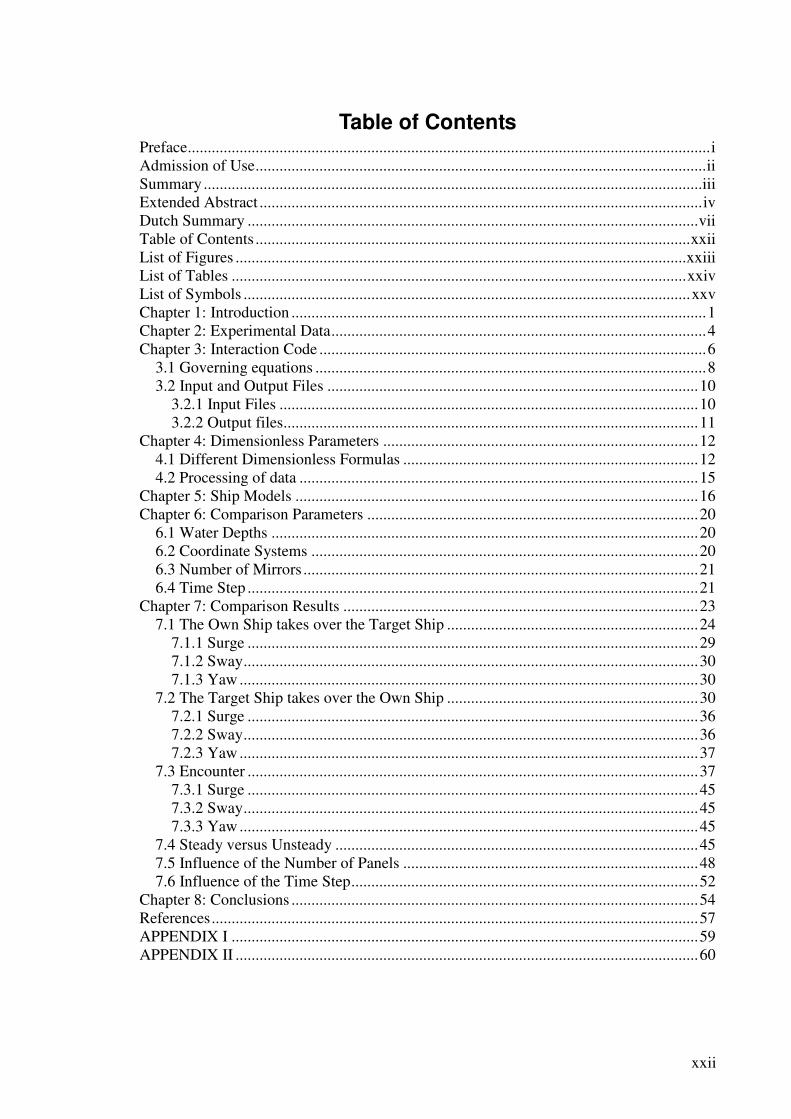
Table of Contents Preface ................................................................................................................................... i
Admission of Use ................................................................................................................. ii
Summary ............................................................................................................................. iii
Extended Abstract ............................................................................................................... iv
Dutch Summary ................................................................................................................. vii
Table of Contents ............................................................................................................. xxii
List of Figures ................................................................................................................. xxiii
List of Tables .................................................................................................................. xxiv
List of Symbols ................................................................................................................ xxv
Chapter 1: Introduction ........................................................................................................ 1
Chapter 2: Experimental Data .............................................................................................. 4
Chapter 3: Interaction Code ................................................................................................. 6
3.1 Governing equations .................................................................................................. 8
3.2 Input and Output Files ............................................................................................. 10
3.2.1 Input Files ......................................................................................................... 10
3.2.2 Output files ........................................................................................................ 11
Chapter 4: Dimensionless Parameters ............................................................................... 12
4.1 Different Dimensionless Formulas .......................................................................... 12
4.2 Processing of data .................................................................................................... 15
Chapter 5: Ship Models ..................................................................................................... 16
Chapter 6: Comparison Parameters ................................................................................... 20
6.1 Water Depths ........................................................................................................... 20
6.2 Coordinate Systems ................................................................................................. 20
6.3 Number of Mirrors ................................................................................................... 21
6.4 Time Step ................................................................................................................. 21
Chapter 7: Comparison Results ......................................................................................... 23
7.1 The Own Ship takes over the Target Ship ............................................................... 24
7.1.1 Surge ................................................................................................................. 29
7.1.2 Sway .................................................................................................................. 30
7.1.3 Yaw ................................................................................................................... 30
7.2 The Target Ship takes over the Own Ship ............................................................... 30
7.2.1 Surge ................................................................................................................. 36
7.2.2 Sway .................................................................................................................. 36
7.2.3 Yaw ................................................................................................................... 37
7.3 Encounter ................................................................................................................. 37
7.3.1 Surge ................................................................................................................. 45
7.3.2 Sway .................................................................................................................. 45
7.3.3 Yaw ................................................................................................................... 45
7.4 Steady versus Unsteady ........................................................................................... 45
7.5 Influence of the Number of Panels .......................................................................... 48
7.6 Influence of the Time Step ....................................................................................... 52
Chapter 8: Conclusions ...................................................................................................... 54
References .......................................................................................................................... 57
APPENDIX I ..................................................................................................................... 59
APPENDIX II .................................................................................................................... 60
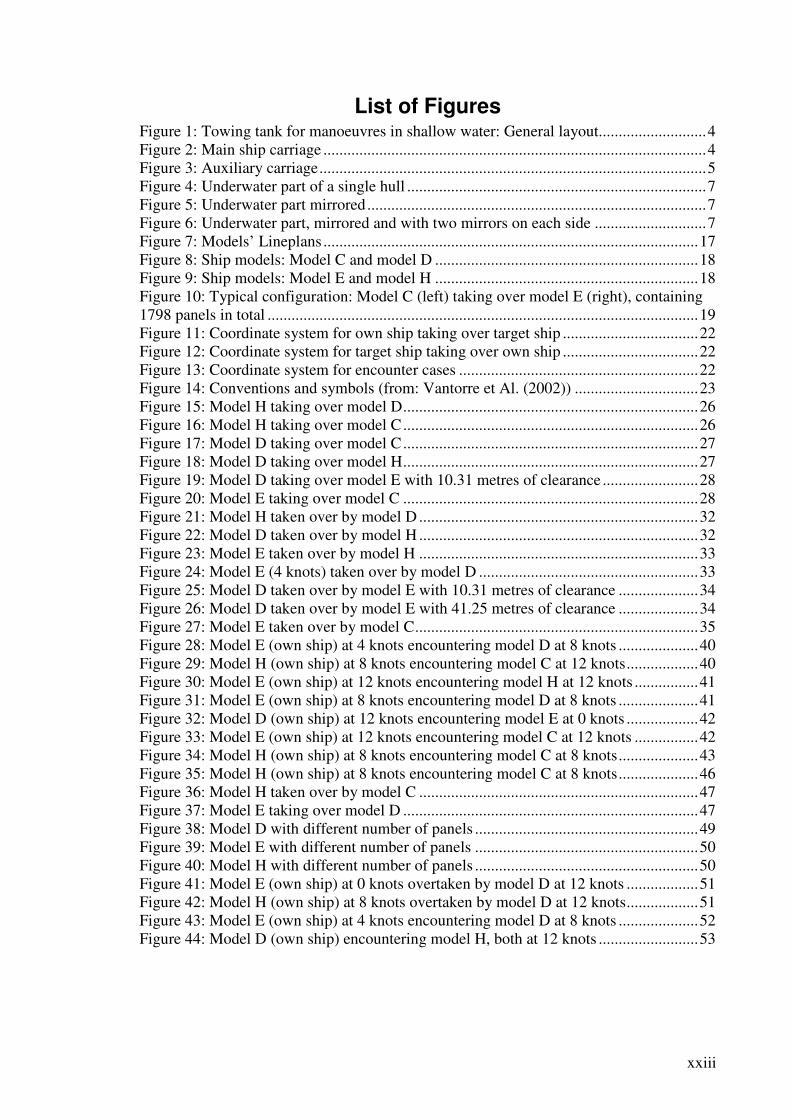
xxiii
List of Figures Figure 1: Towing tank for manoeuvres in shallow water: General layout........................... 4
Figure 2: Main ship carriage ................................................................................................ 4
Figure 3: Auxiliary carriage ................................................................................................. 5
Figure 4: Underwater part of a single hull ........................................................................... 7
Figure 5: Underwater part mirrored ..................................................................................... 7
Figure 6: Underwater part, mirrored and with two mirrors on each side ............................ 7
Figure 7: Models’ Lineplans .............................................................................................. 17
Figure 8: Ship models: Model C and model D .................................................................. 18
Figure 9: Ship models: Model E and model H .................................................................. 18
Figure 10: Typical configuration: Model C (left) taking over model E (right), containing
1798 panels in total ............................................................................................................ 19
Figure 11: Coordinate system for own ship taking over target ship .................................. 22
Figure 12: Coordinate system for target ship taking over own ship .................................. 22
Figure 13: Coordinate system for encounter cases ............................................................ 22
Figure 14: Conventions and symbols (from: Vantorre et Al. (2002)) ............................... 23
Figure 15: Model H taking over model D .......................................................................... 26
Figure 16: Model H taking over model C .......................................................................... 26
Figure 17: Model D taking over model C .......................................................................... 27
Figure 18: Model D taking over model H .......................................................................... 27
Figure 19: Model D taking over model E with 10.31 metres of clearance ........................ 28
Figure 20: Model E taking over model C .......................................................................... 28
Figure 21: Model H taken over by model D ...................................................................... 32
Figure 22: Model D taken over by model H ...................................................................... 32
Figure 23: Model E taken over by model H ...................................................................... 33
Figure 24: Model E (4 knots) taken over by model D ....................................................... 33
Figure 25: Model D taken over by model E with 10.31 metres of clearance .................... 34
Figure 26: Model D taken over by model E with 41.25 metres of clearance .................... 34
Figure 27: Model E taken over by model C ....................................................................... 35
Figure 28: Model E (own ship) at 4 knots encountering model D at 8 knots .................... 40
Figure 29: Model H (own ship) at 8 knots encountering model C at 12 knots .................. 40
Figure 30: Model E (own ship) at 12 knots encountering model H at 12 knots ................ 41
Figure 31: Model E (own ship) at 8 knots encountering model D at 8 knots .................... 41
Figure 32: Model D (own ship) at 12 knots encountering model E at 0 knots .................. 42
Figure 33: Model E (own ship) at 12 knots encountering model C at 12 knots ................ 42
Figure 34: Model H (own ship) at 8 knots encountering model C at 8 knots .................... 43
Figure 35: Model H (own ship) at 8 knots encountering model C at 8 knots .................... 46
Figure 36: Model H taken over by model C ...................................................................... 47
Figure 37: Model E taking over model D .......................................................................... 47
Figure 38: Model D with different number of panels ........................................................ 49
Figure 39: Model E with different number of panels ........................................................ 50
Figure 40: Model H with different number of panels ........................................................ 50
Figure 41: Model E (own ship) at 0 knots overtaken by model D at 12 knots .................. 51
Figure 42: Model H (own ship) at 8 knots overtaken by model D at 12 knots .................. 51
Figure 43: Model E (own ship) at 4 knots encountering model D at 8 knots .................... 52
Figure 44: Model D (own ship) encountering model H, both at 12 knots ......................... 53

xxiv
List of Tables Table 1: Denominators to make the forces dimensionless ................................................. 15
Table 2: Model Properties .................................................................................................. 16
Table 3: Real size properties .............................................................................................. 16
Table 4: Number of panels for each ship ........................................................................... 17
Table 5: Standard water depths and standard drafts. ......................................................... 20
Table 6: Performed Comparisons for the own ship taking over the target ship ................ 25
Table 7: Performed comparisons for the own ship taking over target ship, dimensionless
............................................................................................................................................ 25
Table 8: Comparisons for the own ship taking over the target ship: evaluation ................ 29
Table 9: Performed comparisons for the target ship taking over the own ship ................. 31
Table 10: Performed comparisons for the target ship taking over the own ship,
dimensionless ..................................................................................................................... 31
Table 11: Comparisons for the target ship taking over the own ship: evaluation .............. 36
Table 12: Performed comparisons for encounter ............................................................... 38
Table 13: Performed comparisons for encounter: dimensionless ...................................... 39
Table 14: Comparisons for encounter: evaluation ............................................................. 44
Table 15: Model E (own ship) at 0 knots taken over by model D at 12 knots .................. 48
Table 16: Model H (own ship) at 8 knots taken over by model D at 12 knots .................. 48
Table 17: Model E (own ship) at 4 knots encountering model D at 8 knots ..................... 48

xxv
List of Symbols B1, B2 Own/target ship beam
Fship Force acting on the ship
Fn Froude number
h Water depth
L1, L2 Own/target ship length between perpendiculars
Lpp Length between perpendiculars
Mship Moment acting on the ship
N Yaw moment
Nn’, Ne’ Dimensionless computational yaw moment, dimenionless experimental yaw
moment
T1, T2 Own/target ship draft
V1, V2 Own/target ship speed
X Surge force
Xn’, Xe’ Dimensionless computational surge force, dimenionless experimental surge
force
Y Sway force
Yn’, Ye’ Dimensionless computational sway force, dimenionless experimental sway
force
η1, η2 Own/target ship transverse distance in an earth fixed reference system
η’ Dimensionless transverse distance between ships
λL Length scaling factor
λρ Water density scaling factor
ξ 1, ξ 2 Own/target ship forward distance in an earth fixed reference system
ξ ’ Dimensionless stagger distance between both ships
ρ Water density

1
Chapter 1: Introduction In the voyages made in their lifetime, ships encounter more then once restricted waters in which to
navigate. These restricted waters can affect the manoeuvring and course keeping of the ship.
Increasing ship sizes but restricted waters which maintain equally sized make this problem even
more crucial.
The interaction effects with the ship are caused by several factors. Bottom and bank effects, fixed
obstacles like piers and jetties or interaction with passing or encountering ships. Research has
been done on these effects and numerous papers are written on this topic. Unfortunately the
methods of investigation are sometimes very different in relation to each other. Besides that, there
are innumerable different situations in which interaction can take place, like for instance: overtaking
and encounter with parallel ship’s or not, the ships’ speeds, the water depth, the clearance, the
bank shapes, blockage factor … Most papers cover only one or two specific settings.
In the different publications available are two separate groups: experimental methods versus
theoretical based methods. The first allows to gather accurate data on ship behaviour and forces.
From this, numerical models can be extracted, whether or not with a strong theoretical background.
The weakness of experimental methods is their field of application. Since there are innumerable
different situations, either innumerable different experiments should be done to cover the whole
scene, or extrapolations are necessary. Besides that, experimental research is in most cases time-
consuming.
The other research technique are theoretical based computational methods. They consist of a
theoretical basis from which, with simplifications and numerical calculations, a mathemathical
solution is extracted. Simplifications of the theoretical model are necessary because, depending on
the approximation method, a lot of computational power can be required. Some examples of these
methods are the potential flow theory, slender-body theory and computational fluid dynamics (CFD)
methods. Mostly they allow to calculate solutions for problems which are more diverse, having
thus a larger field of appliance then experimental methods. The computational methods though
have to be validated according to experimental results to determine their accuracy.
A lot of methods have already been developed previously and attempts have been made to
validate them. Also the idea of using potential flow theory has been discussed before.
Abkowitz et al. (1976) created a slender-body theory for two bodies in infinite fluid at moderate
speed . Lagally’s theorem is used to calculate forces and moments, including also the unsteady
terms. The results are compared with experiments from different sources but show large
discrepancies. King (1977) did comparisons for ship interaction in shallow water based on a

2
double hull slender-body theory for unsteady ship interactions. The comparisons are however, only
limited to moored vessel experiments obtained by Remery (1975) and Yeung (1977).
Tuck and Newman (1984) devised two interaction theories, based on slender hulls and with zero
Froude number which were afterwards compared to experimental results. They emphasize the use
of potential flow theory, being likely to be of more importance then the free surface effects.
Kolkman (1987) gives basic considerations on flow patterns for ships manoeuvring in restricted
waters and currents. A short part discusses the influences of self-propelled and towed ships, and
the difference in waves they produce. Korsmeyer, Lee and Newman (1993) made an interaction
code neglecting wave effects by using a rigid, free water surface and the use of 3D models, which
are based on the Hess & Smith panel method. The results are compared with experiments for the
overtaking manoeuvre of two ships in a rectangular canal and one with sloped sides. The channels
boundary’s are represented by plane quadrilateral or triangular panels. Kyulevcheliev et al. (2003)
did a set of model experiments about the hydrodynamic impact of a moving ship on a stationary
ship in restricted water, for inland ships in a canal. Attention is also given to the influence of wave
effects. They come to the conclusion that their results show differences with other experimental
results. Possible reasons are the use of a barge with a box-shaped stern, and intensive wave
generation at higher speed and smaller canal dimensions. Their findings are confirmed by using a
no free-surface CFD simulation. Pinkster (2004) created a double hull potential flow method and a
potential flow method taking the wave effects into account. After, both were compared to
experimental results. The comparisons are specifically for the moored ship cases. Noticed is that
in open water surface effects become negligible for moored ships (for example jetty’s not to close
to the shore). Huang and Chen (2006) presented a practical case of the calculation of forces on a
moored vessel. Computations were made with a Chimera, Reynolds-averaged Navier-Stokes
based computational fluid dynamics model. Their model is able to calculate surface effects,
viscous effects and takes seafloor and bank geometry into account. Results are compared with
towing-tank and field tests. This type of computations is very accurate and complete in their
calculations but requires more calculating power.
The previous examples show that a lot of prediction models have already been made, some more
successful then others. The code used for this thesis has as an important advantage with regard to
the others that it is a relatively simple code, allowing online computations on commonly used
hardware.
The experimental data used in this thesis was presented in Vantorre et al (2002). They did a
comprehensive ship-ship interaction test program, involving four models, with different lateral
clearances, draught’s, speeds and under-keel clearances. Previously, Varyani and Vantorre
(2005) used this data to compare with generic equations for ship-ship interaction forces. These
generic equations are based on inviscid and incompressible fluid without free surface effects. The
comparisons were only done for the forces induced by a passing ship on a moored ship, using
three different water depths.

3
The interaction code used in thesis, was presented in Sutulo and Guedes Soares (2008). The
algorithm calculates the potential flow forces and is based on the Hess and Smith panel method,
using a double hull method. This allows to predict interaction loads with any number of objects in
real-time on a typical modern computer. In the same paper, a first validation was done by
comparing a tug – cargo vessel simulation to an empiric method. In Sutulo and Guedes Soares
(2009) the interaction code was used to simulate trajectories and time histories for two interacting
ships in uncontrolled and controlled motion. The two ships were identical with a length of 175m,
breadth 25.4m and draft 9.5m. Sutulo, Guedes Soares and Otzen (2010) did a validating for the
case of a tug operating near a larger vessel. The ship’s centerplanes were parallel and the
experiments were run in the steady regime. Both ships were un-propelled and fixed in all degrees
of freedom. One of their conclusions is that the worst agreement happens for the surge force and
for the sway force at very small horizontal clearance.
In present thesis, the validating of Sutulo’s and Guedes Soares’ interaction code has been
continued, comparing the interaction experiments from Vantorre with the results obtained by the
code. In the next two chapters, detailed explanations are given about the experimental program
and the interaction code. The following chapter is about the possibilities in making the data
dimensionless. The properties of the four models and the interpolation process are explained in
chapter 5. Before coming to the numerical results, some information is given on the coordinate
systems and the different parameters that are used. In the end, conclusions are drawn on the
comparison results.

4
Chapter 2: Experimental Data The experimental data used for the comparison was recorded by M. Vantorre, E Verzhbitskaya and
E. Laforce. The results from their investigation were published in “Model Test Based Formulations
of Ship-Ship Interaction Forces” in 2002.
The experiments were executed at the Flanders Hydraulics shallow water towing tank in Antwerp,
Belgium. This tank has a useful length of 67 metres (total length 88 metres), a width of 7.0 metres
and a maximum water depth of 0.5 meters (see figure 1). To make the interaction experiments
possible, an auxiliary carriage was installed besides the main planar motion carriage (see figures 2
and 3).
Figure 1: Towing tank for manoeuvres in shallow water: General layout (from Vantorre et Al. (2002))
Figure 2: Main ship carriage
The tests were executed with two models, the own ship and the target ship, being towed at variable
speeds. The own ship, equipped with rudder and a propeller running at self-propulsion point, was
free to heave and pitch, and was the only one on which measurements were made. The target
ship, without propeller and rudder, was also free to heave and pitch, but was not measured on.
The ships were always parallel to each other and all experiments were executed in shallow water.
Four ship models were used to perform the tests, one bulk carrier (model C), one container ship
(model D), one tanker (model E) and one small tanker (model H). The real size lengths varying
from 166 meters for the small tanker to 299 meters for the bulk carrier and the real size widths
varying from 22.2 meters for the small tanker to 46.8 meters for the tanker.
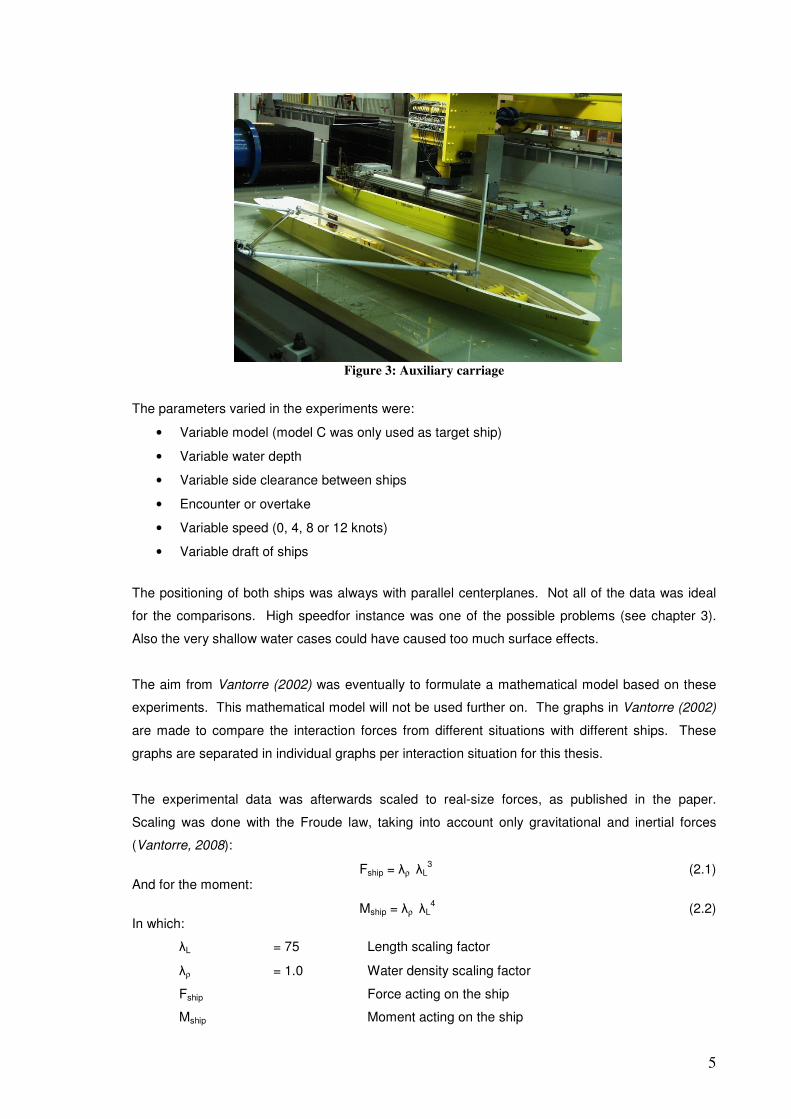
5
Figure 3: Auxiliary carriage
The parameters varied in the experiments were:
• Variable model (model C was only used as target ship)
• Variable water depth
• Variable side clearance between ships
• Encounter or overtake
• Variable speed (0, 4, 8 or 12 knots)
• Variable draft of ships
The positioning of both ships was always with parallel centerplanes. Not all of the data was ideal
for the comparisons. High speedfor instance was one of the possible problems (see chapter 3).
Also the very shallow water cases could have caused too much surface effects.
The aim from Vantorre (2002) was eventually to formulate a mathematical model based on these
experiments. This mathematical model will not be used further on. The graphs in Vantorre (2002)
are made to compare the interaction forces from different situations with different ships. These
graphs are separated in individual graphs per interaction situation for this thesis.
The experimental data was afterwards scaled to real-size forces, as published in the paper.
Scaling was done with the Froude law, taking into account only gravitational and inertial forces
(Vantorre, 2008):
Fship = λρ λL3 (2.1)
And for the moment:
Mship = λρ λL4 (2.2)
In which:
λL = 75 Length scaling factor
λρ = 1.0 Water density scaling factor
Fship Force acting on the ship
Mship Moment acting on the ship

6
Chapter 3: Interaction Code
The interaction code which was to be validated is a potential flow, double body method, based on
the Hess and Smith panel method. It was published in 2008 in “Simulation of the hydrodynamic
interaction forces in close-proximity manoeuvring” by Sutulo S. and Guedes Soares C. Later, in
2009, followed by “Simulation of close-proximity maneuvers using an online 3D potential flow
method” and later on, in a paper submitted for publication, validated in a tanker-tug situation in
“Validation of potential-flow estimation of interaction forces acting upon ship hulls in side-to-side
motion at low Froude number”. The code allows online calculation of interaction forces for multiple
moving and fixed objects for different positions and speeds. The computing power of an average
PC these days allows this process to be done in real-time. The present chapter will give a
summary of the interaction code’s properties, which are explained fully in these three papers.
Hydrodynamic interaction can be subdivided into five parts (Sutulo, S., Guedes Soares C., Otzen
J., 2010):
1. Near-field potential interaction
2. Interaction related to the free-surface effects or wavemaking interaction
3. Boundary layer and viscous wake interaction
4. Interaction caused by longitudinal trailing vortices
5. Action of propeller slipstreams and of the thrusters’ jets
It’s not clear what the contributions of the different components are in the total interaction force.
The interaction code created by Sutulo and Guedes Soares is based on the potential flow
interaction (and thus takes only the first point into account). This choice is made since certain
experience and data accumulated indicate that near-field double body potential interaction can be
the most important component in these cases (Sutulo, S., Guedes Soares C., Otzen J., 2010).
Potential flow interaction includes assuming perfect, inviscid and thus irrotational fluid.
In the experiments executed by Vantorre, however the first four components from the list above are
always present. The last is only created by the own ship (since it was equipped with a propeller)
but has an influence as well on the target ship. However, in the experiments the target ship was
never directly in the propeller’s slipstream, clearances between both ships were in most
experiments half of either the beam of the target or the own ship, only in few cases this clearance
is smaller. Cases in which this influence is not present is when the own ship ‘moves’ at zero
speed. The results for these cases don’t show any peculiar improvement in comparison to cases
where the own ship has a non zero speed.
Ship models are simulated with the classic Hess and Smith panel method (Hess, J.L; Smith, 1967).
This means that the body surface is represented as a set of flat quadrilateral elements with
constant source density on each of them. The ship hulls are doubled with respect to the free

7
surface (figures 4 and 5), in this way requiring only boundary conditions at infinity and on the ship
hull. The waterplane surface acts as a symmetry plane which makes waves impossible. This
requires low Froude numbers to be able to neglect the free surface effects. However, as will be
shown further on, in some encounter cases results are still good for two ships going both a speed
of 12 knots.
Figure 4: Underwater part of a single hull
Figure 5: Underwater part mirrored
Figure 6: Underwater part, mirrored and with two mirrors on each side (in the simulations four
mirrors on each side were used)
Because the experiments were conducted in shallow water (horizontal flat bottom), also mirror
images are necessary (figure 6). They create a series of double hulls with the distance 2h (in which
h is the water depth) between the waterplanes. Theoretically this should be an infinite series of
double hulls, in this way using the same principle as the water surface, namely that the bottom acts
as a symmetry plane through which penetration of the fluid is impossible. In practice, the number
of mirror images used in the comparisons performed was limited to four on each side, allowing

8
acceptable accuracy with acceptable calculating times. This choice is based on Sutulo, S., Guedes
Soares C., Otzen J., (2010) which states that four mirrors will be sufficient in most cases.
The Bernoulli equation used in the potential flow method is different for steady and unsteady cases.
This makes that in the input file for the program a distinction must be made between the two
different modes. Since both ships in the experiments performed always had different speeds, or
went in a different direction, all comparisons are done in unsteady mode. However, in chapter 7 a
section is dedicated to the comparison between unsteady and steady results.
The numerical algorithm used was coded as a Fortran 90 module. The computer program on which
the simulations were run was Visual Fortran 6.0 Developer Studio.
3.1 Governing equations A perfect fluid with irrotational flow can be described with the potential function Φ :
cur curV Vξ ηξ η φΦ = + + (3.1)
This function consists of two terms related to the current, and a perturbation potential ( , , , )tφ ξ η ζ
in which ξ is the advance, η the transfer, ζ the heave motion and t the time( which only matters
in unsteady problems). This perturbation potential satisfies the governing Laplace equation:
0φ∆ = (3.2)
The boundary conditions are a non-penetration boundary condition on each body:
rV n
n
φ∂=
∂i (3.3)
And a condition on the free surface (due to the low-Froude-number assumption) and on the flat
horizontal bottom:
0φ
ζ
∂=
∂ (3.4)
In the non-penetration boundary condition, the n is the outer unity normal to each body. Vr is the
relative local velocity, obtained by subtracting the current velocity from the absolute local velocity of
a point on the body surface. The code can also work for infinite depth, in this case the flat bottom
condition is not present and the perturbation potential must vanish at infinity.

9
The solution of previous problem is done by distributing of a single layer of sources with density σ
on the entire wetted surface. This leads to a Fredholm integral equation of the second kind,
containing a Green-function, which is different depending on the presence of a finite depth or not.
In the cases presented in this thesis, the depth is always finite, and the formulation has thus the
following form:
1 1
( , , , ', ', ')i i i
G x y z x y zr r
∞
=−∞
= +
∑ (3.5)
In which the right hand side term is an infinite series of double hull images, and
( ') ( ') ( ')r x x y y z z= − + − + − and ( ') ( ') ( ')r x x y y z z= − + − + + . The influence of the
farther images however is very small and therefore this series is, like mentioned before, limited to
i = 4.
Solving the Fredholm equation allows expressing the induction velocity and the potential
distributions through the already known single-layer density:
( ) ( ) ( , )d ( )
( ) ( ) ( , )d ( )
I M
S
S
V M P G M P S P
M P G M P S P
σ
φ σ
= ∇
=
∫
∫ (3.6)
The pressure distribution on the panels is obtained by using the unsteady Bernouilli equation
(Lamb, 1968):
( )2 21
2r pp V V
t
φρ
∂ = − + − ∂
(3.7)
In which ρ is the fluid density and
p I rV V V= − (3.8)
VI is the induction velocity expressed through the single-layer density σ(M) which can be obtained
by solving the Fredholm equation mentioned before. The Bernouilli equation shows what is
different between an unsteady and a steady calculation: in the unsteady case the perturbation
potential needs to be evaluated in every time step.
This can then be integrated to obtain the potential force Fpi and moment Mpi acting on the I th body:
i
pi
S
F pndS= −∫ (3.9)

10
i
pi
S
M pr ndS= − ×∫ (3.10)
In which p is the pressure, n is the outer unity normal to each body and S is the panel surface.
The forces and moments obtained by evaluation of previous formulas contain the added masses,
which have to be subtracted to get the net forces and moments on the objects. Sutulo and Guedes
Soares do this based on the equations from Thomson, Tait and Kirchoff (Lamb, 1968). The kinetic
energy from the fluid in the presence of a moving rigid body is represented as:
6
, 1
1
2jk j k
j k
T µ ω ω=
= ∑ (3.11)
In whichj
ω are the three linear velocities (i = 1, 2, 3) and the three rotational velocities (I = 4, 5, 6)
and jk
µ are the added mass coefficients for the i th body as:
d
i
jk j k
S
m Sµ ρ φ= − ∫ (3.12)
Where m1, m2, m3 are the projections of the normal n onto the body axes x, y and z. m4, m5, m6 are
similar projections of r x n. The potentials j
φ are obtained as a solution to the Fredholm equation.
The formulation of the proper hydrodynamic interaction forces is then eventually:
11 22
22 26 11
26 66 11 22 26( )
e
e
e
X u vr
Y v r ur
N v r uv ur
µ µ
µ µ µ
µ µ µ µ µ
= − +
= − − −
= − − + − −
�
� �
� �
(3.13)
The pure interaction forces are then:
; ;I p e I p e I p e
X X X Y Y Y N N N= − = − = − (3.14)
3.2 Input and Output Files
3.2.1 Input Files The input files contain a data file and the files which contain the model geometry (one file per
object). This geometry file divides the body in sections and then the sections in offsets.
11
The input files requests an input for:
• Number of bodies involved
• Steady or unsteady
• Total simulation time (seconds)
• Time step (seconds)
• Current velocity (two coordinates in an earth-fixed coordinate system)
Besides that, for every object, three degrees of freedom are present, as an initial value, a speed
and an acceleration parameter:
• Initial advance position (metres)
• Initial transfer position (metres)
• Initial heading (degrees)
• Initial advance velocity (m/s)
• Initial transfer velocity (m/s)
• Initial rate of yaw (dg/s)
• Advance acceleration
• Transfer acceleration
• Yaw acceleration
Other parameters are hard-coded, like the water depth, the water mass density and the number of
mirrors.
From these parameters, some are only used once at the initialization of the program. The
subroutine “Hydro_Interaction_Response” requires at every time step the number of bodies, the
time, three position coordinates and three quasi-velocities. The calculation mode (steady or
unsteady) is set at the initialization of the program, as well as the current speed by subtracting it
from the initial velocities. The present time is calculated by multiplying the time step with the
number of calculation steps already executed. With the time known, it is possible to calculate the
present speed by summing the initial speed with the multiplication of the acceleration and the
present time. Integrating this equation will give the present position, these parameters for speed
and position are then used in the Hydro_interaction_Response subroutine. Every initial parameter
describing position, speed and acceleration is thus used at every time step.
3.2.2 Output files The output consists of multiple files. First of all, there is the ‘force file”, giving the calculated forces
and moments for every time step, as well as the position from the object at that time step.
The added masses are presented in a separate file, these are calculated once before the first time
step. These are the ones presented in the equations 3.4. At every time step, a geometry file is
made for every object which can be used in, for example, Tecplot. As well as a geometry file
containing all the objects at the same time.

12
Chapter 4: Dimensionless Parameters Data of the performed experiments was available in real-size forces. Making them dimensionless
helps to eliminate a great part of the scale influence and makes it possible to compare
manoeuvring performance of ships with different sizes and speed (Sutulo, 1999).
4.1 Different Dimensionless Formulas The characteristic quantities needed for the forces formulas are a speed and a length. The
selection of these two parameters is not trivial when more then one ship is involved. Possibilities
were searched in the available literature.
According to Vantorre (2002), there are ten possible parameters which can be changed and on
which the formulas can be based:
(a) own ship (subscript “1”) (e) draft of target ship (T2) (i) orientation of the target ship
(b) target ship (subscript “2”) (f) lateral distance (d) (j) speed of the target ship (V2)
(c) water depth (h) (g) orientation of the own ship
(d) draft of own ship (T1) (h) speed of the own ship (V1)
The own ship is the ship on which the force measurements are made. The orientation of the ships
was always parallel, therefore, the factor (i) doesn’t have to be taken into account. The properties
of the “own ship” and the “target ship” consist, among others, of a width and a length.
In Varyani (2004) following parameters are used:
1
2
1 1 1
1
2
1 1 1 1
'1
2
'1
2
YY
V B T
NN
V B T L
ρ
ρ
=
=
(4.1)
For the stagger distance:
( )1 2
1 2
2'
L L
ξ ξξ
−=
+ (4.2)
In Norrbin (1975) a parameter for the separation is given:
( )1 2
1 2
'B B
ηη η
+=
− (4.3)

13
This formula is used because a ship can be seen as a special case of a bank in a canal. The force
on the ship next to a bank is proportional to the distance. However, this formula will give results
which are going to infinity when transverse distance decreases.
The formulas for the stagger distance are the same as Varyani et al. (1998).
Dand (1981) did experiments on ship-ship interaction in shallow water, he considered overtaking
and encounter manoeuvres on parallel and reciprocal parallel courses between two different ships.
2 2 2 2
1 1 2 1 1 2 1 1 2
2 2 2' , ' , '
X Y NX Y N
B TV B TV B TVρ ρ ρ= = = (4.4)
The stagger is expressed as a function of the own ship length:
( )1 2
1
'L
ξ ξξ
−= (4.5)
In Dand (1975) the same coefficients are used. A remark made here is that the interaction forces
vary approximately as the square of the speed, which explains the use of the target’s ship
quadratic speed.
De Decker (2006) wrote a master thesis about lightering operations. In this he also used
dimensionless force coefficients depending on two speeds. The argumentation for using these
coefficients is stated as being ‘the classical way’:
1 1 1 2 1 1 1 2 1 1 1 1 2
' ; ' ; '1 1 1
2 2 2
X Y NX Y N
B TVV LTVV B LTVVρ ρ ρ= = = (4.6)
Gronarz (unknown) did tests in a shallow water tank to investigate interaction forces. The
nondimensional coefficients used are, because of the pitot pressure:
2 2 2 2
1 1 1 1 1 1 1 1 1
' ; ' ; '1 1 1
2 2 2
X Y NX Y N
V L T V L T V L Tρ ρ ρ= = = (4.7)
Brix (1993) uses averages:
2 2 2 2
' ; ' ; '1 1 1
2 2 2m m m m m m m m m
X Y NX Y N
V L T V L T V L Tρ ρ ρ= = = (4.8)
With

14
( ) ( ) ( )1 2 1 2 1 2
1 1 1; ;
2 2 2m m m
L L L T T T V V V= + = + = + (4.9)
These formulas have the advantage that the forces never go to infinity when the speed from one
ship is zero, like for example, the formulas in 4.6.
Remery (1974) did experiments to calculate the mooring forces when a ship at shore is passed by
an other ship. He concluded that according to Bernouilli’s law, the variation of the pressure in the
flow around the ship is proportional to the square of the induced water velocity. This induced water
velocity may be considered proportional with the ship’s speed.
For two ships having a non-zero speed however, the induced water velocity between both ships will
be dependant on the speed of both ships. Which means that both ship’s speeds should be used in
the formulas.
Eventually, following factors were used:
For the longitudinal and transverse distances:
( )
( )
1 2
1 2
1 2
1 2
2'
2'
L L
B B
ξ ξξ
η ηη
−=
+
−=
+
(4.10)
In which i
ξ and i
η are respectively the longitudinal and transverse distances from each ship with
regard to an earth-fixed reference system.
For the forces, a proposal from professor Sutulo was adopted:
( )
( )
2 2
1 1 2 2
2 2 2
1 1 2 2
2'
2'
ii
i i
ii
i i
FF
LT V VV V
MM
L T V VV V
ρ
ρ
=− +
=− +
1,2i = (4.11)
For the Froude number, based on length and depth:
2 2 2 2
1 1 2 2 1 1 2 2,i hi
i
V VV V V VV VFn Fn
gL gh
− + − += = 1,2i = (4.12)

15
The motivation for these formulas arises from the fact that both ships speed’s play a role in the
values obtained. On the other hand, the dimensionless forces should not go to infinity at zero
speed, like in some of the previous formulas. With these formulas the most extreme situations are
covered:
1
1 2
2
0
0
V
V V
V
=
=
=
2
2
2 2
2 1
2
1
2'
2 2'
2'
ii
i i
i ii
i i i i
ii
i i
FF
LTV
F FF
LTV LTV
FF
LTV
ρ
ρ ρ
ρ
=
= =
=
(4.13)
A resume of this chapter is made in table 1. Noticeable is that, instead of the length, also the beam
is used a lot as a characteristic parameter. The only two formulas able to handle zero speed are
either Brix and Sutulo.
Forces Denominator
X Y N
ConstantMass
Density Speeds Lengths Speeds Lengths Speeds Lengths
Varyani 1/2
Dand 1/2
De Decker 1/2
Gronarz 1/2
Brix 1/2
Sutulo 1/2
Table 1: Denominators to make the forces dimensionless
4.2 Processing of data The available data had to be transferred to dimensionless data files, containing only the surge
force, sway force and yaw moment for one ship for one specific situation.
The speeds and characteristic lengths were known for each situation. The mass density used was
the salt water density (1025 kg/m3). A C++ program was written which was able to extract the
original data from the Excel files, make it dimensionless, and eventually put it into a Tecplot format.
ρ1B T 1 1 1B T L
ρ1B T 2
1 1B T2
2V2
2V
ρ
1B T
1B T2
2V
1B T 1L T 1 1B L T1 2V V 1 2V V 1 2V V
ρ 2
1V2
1V2
1V1L T 1L T 2
1 1L T
ρ 2
mV
2
mV
2
mV
2
m mL Tm m
L Tm m
L T
iL T
iL T 2
iL T( )2 2
1 1 2 2V VV V− +( )2 2
1 1 2 2V VV V− +( )2 2
1 1 2 2V VV V− +ρ
2
1V2
1V2
1V

16
Chapter 5: Ship Models The experiments were executed with four different models, (tables 2 and 3; figure 7). A lot of
experiments were done with model E as own ship, fewer with model D and H. Model C was only
used as a target ship. The scaling factor was 1:75.
Ship model C D E H
Ship type Bulk carrier Container ship Tanker Small tanker
Lpp m 3.984 3.864 3.824 2.21
B m 0.504 0.55 0.624 0.296
T m 0.18 0.18 0.207 0.125 0.178
CB - 0.843 0.588 0.816 0.796 0.83
Table 2: Model Properties (Model H has a different draught when used as own or as target ship)
Ship model C D E H
Ship type Bulk carrier Container ship Tanker Small tanker
Lpp m 298.8 289.8 286.8 165.75
B m 37.8 41.25 46.8 22.2
T m 13.5 13.5 15.53 9.38 13.35
CB - 0.843 0.588 0.816 0.796 0.83
Table 3: Real size properties
Model H has two different draughts, the larger value is used when model H is the own ship. The
smaller value when model H is the target ship.
The original data files were not detailed enough, and would have given rise to irregular panel
patterns. Therefore, all the models had to be interpolated with cubic-spline interpolation. First
length-wise, followed by a interpolation and redistribution for the vertices for each section.
Before this could be done, it was necessary to choose a panel size. In Sutulo S, Guedes Soares
C. and Otzen J. (2010) experiments are conducted for a tanker and a tug situation. The tanker has
a length of 186 meters and the tug 25 meters. For this situation five different models were made
with a different number of panels, creating a total panel size of 3506, 936, 570, 356 and 292 panels
for both ships together. In this paper, in most cases higher panel size means higher accuracy
(however differences are small), but also a large increase in calculating time. The variant with 936
panels (558 on the tanker, 378 on the tug) was therefore assessed as optimal for the offline
computations performed in that paper.

17
-10 0 100
5
10
15
20
-20 -15 -10 -5 0 5 10 15 200
5
10
15
20
-20 -10 0 10 200
5
10
15
20
25
30
-10 -5 0 5 100
5
10
Figure 7: Upper Left: Model C; Upper Right: Model D; Down Left: Model E (Esso Osaka); Down
right: Model H (British Bombardier) with two waterlines
The numerical models for model C, D, E and H have all, except H, a length of almost 300 meters,
in contrary to the tanker mentioned before which was almost 200 meters. Eventually the models
had following number of panels (table 4):
Model C Model D Model E Model H Own Model H Target
886 896 932 554 544
Table 4: Number of panels for each ship
This number is quite large, and as will be seen later on (chapter 7), a smaller value could have
been possible, maybe 500 to 600 panels for the large ships and 400 to 500 for model H. The
number of panels however has been chosen this large to maintain them as accurate as possible
with respect to the real models used. After all, the possibility existed that less accuracy would lead
to worse comparisons, making it safer to choose a rather large margin on the number of panels,
excluding the risk of bad comparisons due to bad models.
Plots of the models used for the comparisons are shown in figures 8 and 9. A typical overtake
situation is shown in figure 10.
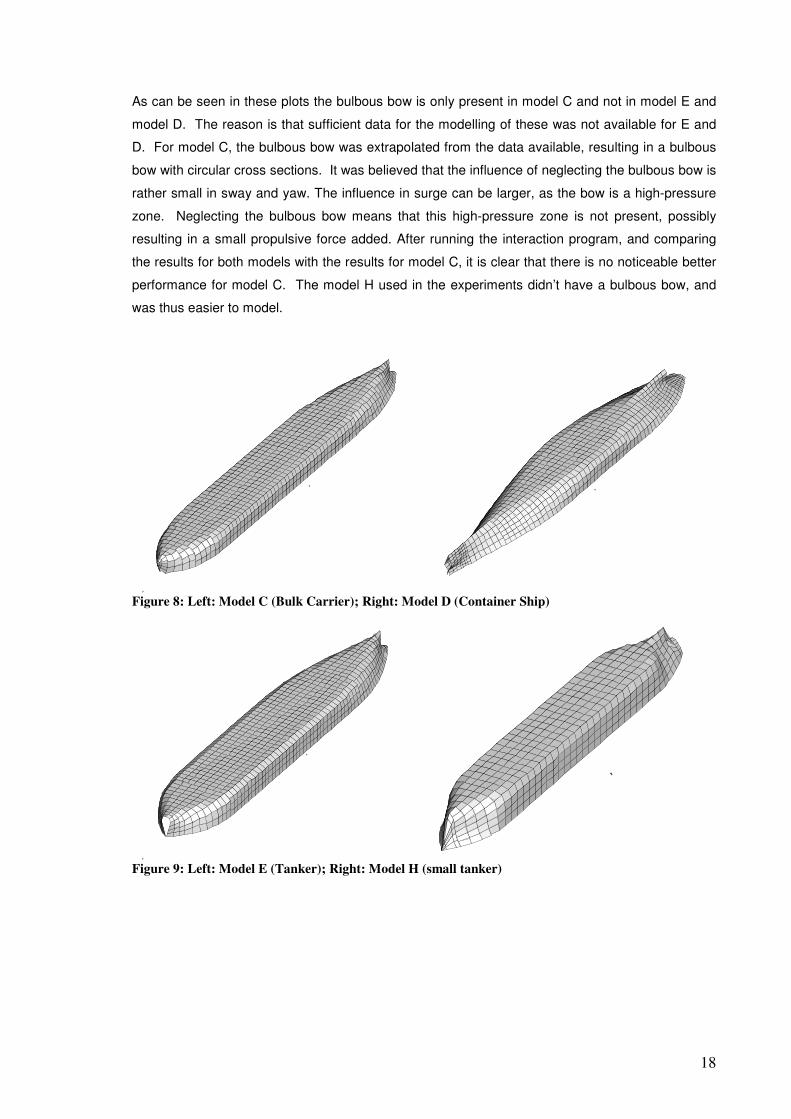
18
As can be seen in these plots the bulbous bow is only present in model C and not in model E and
model D. The reason is that sufficient data for the modelling of these was not available for E and
D. For model C, the bulbous bow was extrapolated from the data available, resulting in a bulbous
bow with circular cross sections. It was believed that the influence of neglecting the bulbous bow is
rather small in sway and yaw. The influence in surge can be larger, as the bow is a high-pressure
zone. Neglecting the bulbous bow means that this high-pressure zone is not present, possibly
resulting in a small propulsive force added. After running the interaction program, and comparing
the results for both models with the results for model C, it is clear that there is no noticeable better
performance for model C. The model H used in the experiments didn’t have a bulbous bow, and
was thus easier to model.
x
y
x
Figure 8: Left: Model C (Bulk Carrier); Right: Model D (Container Ship)
x
y
x
Figure 9: Left: Model E (Tanker); Right: Model H (small tanker)

19
x
y
z
Figure 10: Typical configuration: Model C (left) taking over model E (right), containing 1798 panels in
total

20
Chapter 6: Comparison Parameters The experiments were always executed with two ships from which the centerplanes were parallel.
Most experiments were executed with clearances of, or half the beam of the target ship, or half the
beam of the own ship. The exact value is given in chapter 7 were the comparisons are shown.
Only in a few specific cases larger or smaller clearances are used.
6.1 Water Depths The standard water depths are written down in table 5. The water depths are only in two cases
different from the standard water depth, namely the two encounter cases between model E and
model D, in which the water depths are respectively 17.08 meters and 23.04 meters.
OWN T0
D E H
13.50 15.53 13.35
TA
RG
ET
Tt
C
13.50 17.08 18.63 17.08
D
13.50 X
17.08
18.63 18.63
23.04
E
15.53 18.63 X 18.63
H
9.38 17.08 18.63 X
Table 5: Standard water depths (in bolt) and standard drafts. The values in the table denote the water
depth h
6.2 Coordinate Systems Vantorre et al.(2002) use a ship fixed coordinate system, depending from which side the target ship
passes. Sutulo and Guedes Soares (2008) use a standard body-fixed coordinate system,
independent of the target ship. This had as a consequence that bad positioning of the ships would
require transformations between both coordinate systems.
The system used by Vantorre is:
• X’ Dimensionless longitudinal force: Positive if forward
• Y’ Dimensionless lateral force: Positive if repulsive
• N’ Dimensionless yaw moment: Positive if bow repulsed
A common used system, used by Sutulo, with a body-fixed frame is:
• X’ Dimensionless longitudinal force: Positive if forward
• Y’ Dimensionless lateral force: Positive to starboard side
• N’ Dimensionless yaw moment: Positive if clockwise (from sky perspective)

21
However, if simulations are done in this way that:
• The own ship takes over the target ship: The target ship is at port side of the own ship
• The target ship takes over the own ship: The own ship is at starboard side of the target
ship
• Encounter: Both ships are at port side with regard to each other
the coordinate systems from both will be equal. This is made clear in figures 11 to 13. This
standard setting is to keep the output files uniform and easier to process. There are two
exceptions for this standard setting. Both the exceptions are cases in which the same experiment
has been done twice, , so that data is available for both the target ship as for the own ship. In this
case the simulation only had to be run once. For these two cases (both encounter cases), an
additional file is added in the folder on the CD under the name “first column data.txt”.
6.3 Number of Mirrors Like mentioned before, the number of mirrors to simulate the bottom is four on each side.
6.4 Time Step The time step between the calculations is one second, for encounter as well as for overtake
manoeuvres. This number is chosen to maintain a good balance between accuracy and simulation
time. Overtake manoeuvres were simulated, depending on the situation, with a total time of more
or less 500 seconds. Encounter manoeuvres required around 250 seconds. Using a smaller time
step would have result in a considerable increase in simulation time. In section 7.6 the effect of
reducing the time step is examined.

22
Figure 11: Coordinate system for own ship taking over target ship used by Sutulo (left) and by
Vantorre (right)
Figure 12: Coordinate system for target ship taking over own ship used by Sutulo (left) and by
Vantorre (right)
Figure 13: Coordinate system for encounter cases used by Sutulo (left) and by Vantorre (right)

23
Chapter 7: Comparison Results The comparisons between the experimental data and the computational results are divided in three
cases:
• Forces measured on the overtaken ship
• Forces measured on the overtaking ship
• Encounter
The results for these situations are discussed separately in the next three sub-sections. The
number of panels equals the standard number of panels as mentioned in chapter 5. In total, 62
comparisons are performed for these standard models. Because they can not be plotted all, only
the most interesting results will be plotted and discussed in this thesis. The other ones are
available on the CD.
The results are always plotted in three graphs: surge, sway and yaw. The interaction code is a
potential flow code meaning that the ship’s proper resistive force is zero. The real value differs
slightly due to errors originating in numerical calculation methods used. Also the experimental data
was available with the proper resistive force of the ship already subtracted. In the comparisons
represented further on are thus only the added propulsive or resistive forces due to the interaction
effects present in the surge force.
Coordinates for longitudinal distance and transverse clearance are as follows (figure 14): ξ’ longitudinal distance between the midship sections from the own and the target ship,
divided by (LO + LT)/2, increasing with time in any manoeuvre
ybb clearance between the ships (in metres)
TARGET
OWN
yo
xo
LT
BT
ybbycc ycb
yooyoT
1
2(L o +L T )
L o
Bo
To
TT
h
Vo VT Figure 14: Conventions and symbols (from: Vantorre et Al. (2002))
The own ship is the ship on which the forces are measured. Computational results are available
for both the target and the own ship. The experimental results are only available for the own ship.
Therefore comparisons are only plotted for the own ship.
24
The process is unsteady since a relative speed between both ships exist and is as such calculated
by the computational code for the following sub-sections.
The calculation time was very difficult to predict. Since the simulations were run on different
computers with different specifications it is not possible to compare these times. But also between
simulations run on the same computer, a small change in a single parameter (for instance the
water depth) could double the calculating time. On the other hand, reducing the number of panels
gave a noticeable decrease in calculating time.
The final results are not compared in a mathemathical way. To overcome this, a division is made
for the results, based on the visual results:
• No agreement
• Qualitative agreement: the same shape, but not the same values
• Quantitative agreement: the same shape and the same values
There are only three possible classifications, because evaluation of the graphs on sight is very
arbitrary. But even then, it is sometimes hard to classify certain cases. For example a graph
containing two peaks from which one gives complete accordance, but the other one only partly can
be assigned as qualitative agreement. But it can also be assigned as quantitative agreement when
the peak which only partly agrees, is a lot smaller. Therefore this classification can not be used as
a strict classification but is used to give an idea of the global results of the comparisons.
7.1 The Own Ship takes over the Target Ship The 14 comparisons executed are given in table 6. The speeds are always 12 knots for the
overtaking ship and 8 for the overtaken ship. Like mentioned before this might be to fast to use only
potential flow code, but as seen further on, some good results are obtained. The drafts and the
water depths are the standard values as mentioned in chapter 6. In table 7 all the absolute values
are made dimensionless in the way explained in chapter 4.
In all graphs the horizontal axis is the dimensionless longitudinal distance between both ships. The
vertical axis is the dimensionless force component. Subscript “n” stands for “numerical” and are
the computational results (solid line). Subscript “e” stands for experimental results (dashed line
with squares).
The graphical results for the case when model H is overtaking model D is presented in figure 15.
In these graphs the numerical calculations approximate the best the experimental results.

25
Own Ship takes over Target Ship
Ships Speeds Drafts Clearance Depth
Own Target
Own (knots)
Target (knots)
Own (m)
Target (m)
ybb (m)
h (m)
1 D C 12 8 13.5 13.5 18.9 17.08
2 D E 12 8 13.5 15.53 20.63 18.63
3 D E 12 8 13.5 15.53 10.31 18.63
4 D E 12 8 13.5 15.53 41.25 18.63
5 D E 12 8 13.5 15.53 82.5 18.63
6 D E 12 8 13.5 15.53 123.75 18.63
7 D E 12 8 13.5 15.53 165 18.63
8 D H 12 8 13.5 9.38 11.1 17.08
9 E C 12 8 15.53 13.5 18.9 18.63
10 E D 12 8 15.53 13.5 20.63 18.63
11 E H 12 8 15.53 9.38 11.1 18.63
12 H C 12 8 13.35 13.5 18.9 17.08
13 H D 12 8 13.35 13.5 20.63 17.08
14 H E 12 8 13.35 15.53 23.4 18.63
Table 6: Performed Comparisons for own ship taking over the target ship
Parameters Dimensionless Parameters
Ships Speeds Depth Froude Nr Speed Transverse Distance
Own Target
Own (knots)
Target (knots)
own Target Own
length Target length
Depth h Own/
Target η'
1 D C 12 8 1.27 1.27 0.10 0.10 0.42 1.50 1.48
2 D E 12 8 1.38 1.20 0.10 0.10 0.40 1.50 1.47
3 D E 12 8 1.38 1.20 0.10 0.10 0.40 1.50 1.23
4 D E 12 8 1.38 1.20 0.10 0.10 0.40 1.50 1.94
5 D E 12 8 1.38 1.20 0.10 0.10 0.40 1.50 2.87
6 D E 12 8 1.38 1.20 0.10 0.10 0.40 1.50 3.81
7 D E 12 8 1.38 1.20 0.10 0.10 0.40 1.50 4.75
8 D H 12 8 1.27 1.82 0.10 0.14 0.42 1.50 1.35
9 E C 12 8 1.20 1.38 0.10 0.10 0.40 1.50 1.45
10 E D 12 8 1.20 1.38 0.10 0.10 0.40 1.50 1.47
11 E H 12 8 1.20 1.99 0.10 0.14 0.40 1.50 1.32
12 H C 12 8 1.28 1.27 0.14 0.10 0.42 1.50 1.63
13 H D 12 8 1.28 1.27 0.14 0.10 0.42 1.50 1.65
14 H E 12 8 1.40 1.20 0.14 0.10 0.40 1.50 1.68
Table 7: Performed comparisons for own ship taking over target ship, dimensionless
An other interesting result is shown in figure 16. These graphs represent the results for model H
taking over model C. The computational surge force has a different shape and shows a local
minimum followed by a local maximum when the midships are aligned. This twist is not present in
the experimental result, which has more or less the same shape as when H is overtaking D.

26
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
N′n
N′e
Figure 15: Model H taking over model D
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.035
-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.02
0
0.02
0.04
0.06
N′n
N′e
Figure 16: Model H taking over model C
In figure 17 and figure 18 are two more comparisons shown from the cases with the relative best
results, namely model D taking over model C and model D taking over model H. In which the first
is a comparison of two ships with more or less the same length and the second is a comparison of
two ships of significant different length.
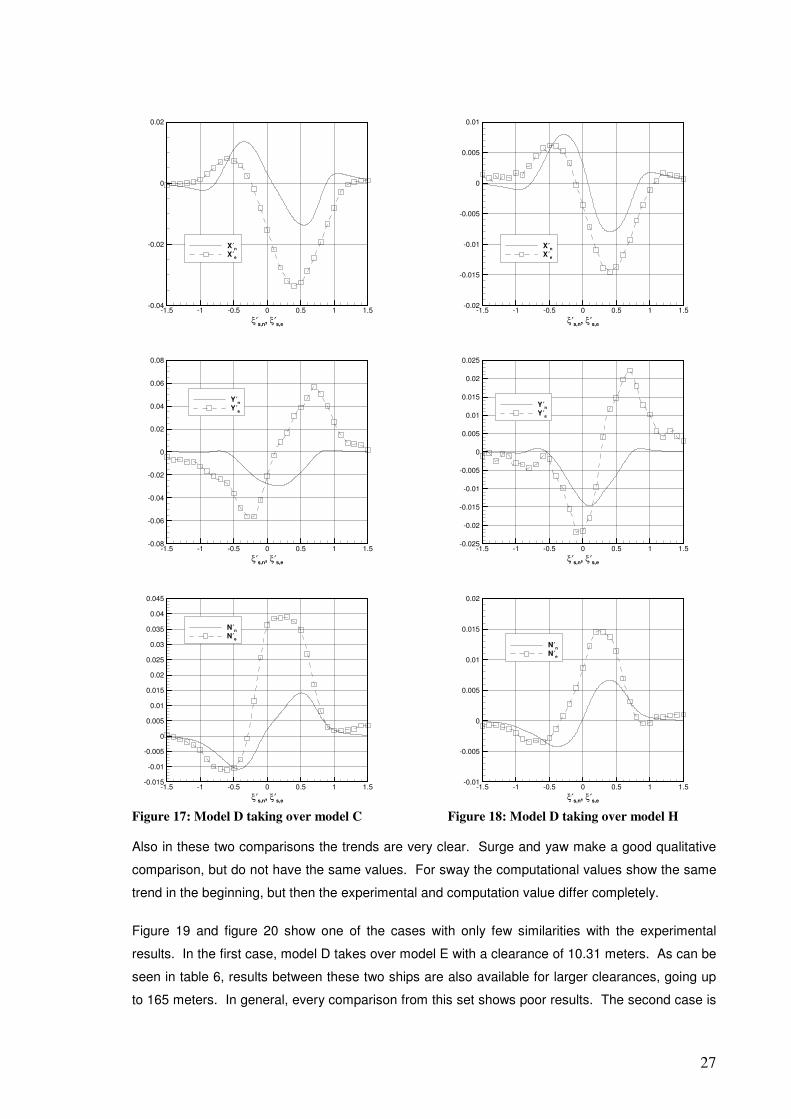
27
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.02
0
0.02
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
N′n
N′e
Figure 17: Model D taking over model C
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.01
-0.005
0
0.005
0.01
0.015
0.02
N′n
N′e
Figure 18: Model D taking over model H
Also in these two comparisons the trends are very clear. Surge and yaw make a good qualitative
comparison, but do not have the same values. For sway the computational values show the same
trend in the beginning, but then the experimental and computation value differ completely.
Figure 19 and figure 20 show one of the cases with only few similarities with the experimental
results. In the first case, model D takes over model E with a clearance of 10.31 meters. As can be
seen in table 6, results between these two ships are also available for larger clearances, going up
to 165 meters. In general, every comparison from this set shows poor results. The second case is

28
model E taking over model C. Here there is only few accordance in yaw. Surge shows only minor
resemblance and the sway force shows no resemblance. The results for the computational surge
force are quite unique in this case, showing no explicit peaks in the force.
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.02
0
0.02
0.04
0.06
N′n
N′e
Figure 19: Model D taking over model E with
10.31 metres of clearance
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
N′n
N′e
Figure 20: Model E taking over model C
The six comparisons illustrated before show some trends, which is also present in the other figures
not presented in this thesis, but available on the CD.

29
Using the division method based on the quantitative and qualitative division, table 8 is obtained for
these cases. In which the symbols have following meaning:
X No agreement
V Qualitative agreement
VV Quantitative agreement
As the table shows, agreement for sway is always mean. Neither the values, nor the shapes agree
with the experimental results. For surge some good results are obtained as well as for yaw. These
good results are obtained in the last three cases, when model H, being a lot smaller then the other
ships, is taking over the other three models. An other remark is that the yaw force shows
especially disagreement in the cases where model D takes over model E.
Own Ship takes over Target Ship
Ships Speeds Clearance Results
Own Target
Own (knots)
Target (knots)
ybb (m)
surge sway yaw
1 D C 12 8 18.9 V X V
2 D E 12 8 20.63 V X X
3 D E 12 8 10.31 V X X
4 D E 12 8 41.25 V X X
5 D E 12 8 82.5 V X X
6 D E 12 8 123.75 V X X
7 D E 12 8 165 V X X
8 D H 12 8 11.1 V X V
9 E C 12 8 18.9 X X V
10 E D 12 8 20.63 V X V
11 E H 12 8 11.1 X X V
12 H C 12 8 18.9 V X VV
13 H D 12 8 20.63 VV X VV
14 H E 12 8 23.4 V X VV
No. of X 2 14 6
No. of V 11 0 5
No. of VV 1 0 3
Total 14 14 14
Table 8: Comparisons for the own ship taking over the target ship: evaluation
7.1.1 Surge According to the computational results, when ξ is more or less -1, the ship undergoes a small
resistive force, followed by an extra propulsive force which reaches a peak between -0.5 and -0.3.
This peak is followed by a quick decrease of the propulsive force, with sometimes a local minimum
and maximum around 0 like in figure 16. Subsequently the ship undergoes an additional resistive
force. When ξ is more or less 1, once again a small propulsive force is generated followed by a

30
return to zero of the surge force. For all cases the results from the computational results show a
symmetry around the origin.
The experimental results show the same trends. The small resistive force and the small propulsive
force in the beginning and end are mostly not present. The resistive and propulsive peaks are
present, but with the resistive peak in most cases a lot larger than the propulsive peak. This makes
that in general the propulsive peak is overestimated by the computer code, and the resistive peak
underestimated.
7.1.2 Sway The sway forces show for all these cases a very bad accordance. The computational sway force
shows only a strong attractive force. With sometimes a slight reduction from the attraction force
when the amidships are aligned. Like the surge force, there is some symmetry present, but this
time around the vertical axis.
The experimental results however show more a symmetry around the origin. They show a peak in
the attractive force between -0.5 and -0.3 followed by a climb to a repulsive peak between 0.5 and
0.8. The absolute value of both peaks is in most cases quite equal. The repulsive peak is nowhere
present in the computational data. Also the attractive peak is in most cases underestimated.
7.1.3 Yaw The computational yaw results are characterised by an attractive force on the bow towards the ship
which is being overtaken. Followed by a strong repulsive force on the bow in the second part of the
manoeuvre (after the amidships sections have been aligned). The two peaks have in most cases
more or less the same absolute value.
The behaviour of the plots in the experimental results resembles the computation results, with this
difference that in some cases the repulsive bow force in the second part of the manoeuvre is a lot
stronger then the attractive force in the first part.
In most cases, the comparison results are good in the first (attractive) peak. When the experimental
results are approximately symmetric around the origin, the comparison is also good for the second
peak (see figures 15 and 16). If this symmetry is not present, the second (repulsive) peak is mostly
a lot stronger in the experimental results (figures 17, 18 and 19). In two cases, there is a scaling
discrepancy for both peaks, when model E is taking over model C (figure 20) and when model E is
taking over model D (on the CD).
7.2 The Target Ship takes over the Own Ship In the following cases, measurements are made on the ship which is being overtaken (the own
ship). The target ship has always a speed of 12 knots and a clearance and water depth depending
on the situation. The own ship has in most cases a speed of 8 knots, except for one case

31
resembling a moored ship (0 knots) and one case at low speed (4 knots). All this data is
summarized in table 9 and dimensionless in table 10.
Target Ship takes over Own Ship
Ships Speeds Drafts Clearance Depth
Own Target
Own (knots)
Target (knots)
Own (m)
Target (m)
ybb (m)
h (m)
1 D C 8 12 13.5 13.5 18.9 17.08
2 D E 8 12 13.5 15.53 20.63 18.63
3 D E 8 12 13.5 15.53 10.31 18.63
4 D E 8 12 13.5 15.53 41.25 18.63
5 D E 8 12 13.5 15.53 82.5 18.63
6 D E 8 12 13.5 15.53 123.75 18.63
7 D E 8 12 13.5 15.53 165 18.63
8 D H 8 12 13.5 9.38 11.1 17.08
9 E D 0 12 15.53 13.5 20.63 18.63
10 E D 4 12 15.53 13.5 20.63 18.63
11 E C 8 12 15.53 13.5 18.9 18.63
12 E D 8 12 15.53 13.5 20.63 18.63
13 E H 8 12 15.53 9.38 11.1 18.63
14 H C 8 12 13.35 13.5 18.9 17.08
15 H D 8 12 13.35 13.5 20.63 17.08
16 H E 8 12 13.35 15.53 23.4 18.63
Table 9: Performed comparisons for the target ship taking over the own ship
Parameters Dimensionless Parameters
Ships Speeds Depth Froude Nr Speed
Transverse Distance
Own Target
Own (knots)
Target (knots)
own Target Own
length Target length
Depth h Own/
Target η'
1 D C 8 12 1.27 1.27 0.10 0.10 0.42 0.67 1.48
2 D E 8 12 1.38 1.20 0.10 0.10 0.40 0.67 1.47
3 D E 8 12 1.38 1.20 0.10 0.10 0.40 0.67 1.23
4 D E 8 12 1.38 1.20 0.10 0.10 0.40 0.67 1.94
5 D E 8 12 1.38 1.20 0.10 0.10 0.40 0.67 2.87
6 D E 8 12 1.38 1.20 0.10 0.10 0.40 0.67 3.81
7 D E 8 12 1.38 1.20 0.10 0.10 0.40 0.67 4.75
8 D H 8 12 1.27 1.82 0.10 0.14 0.42 0.67 1.35
9 E D 0 12 1.20 1.38 0.12 0.12 0.46 0.00 1.47
10 E D 4 12 1.20 1.38 0.10 0.10 0.40 0.33 1.47
11 E C 8 12 1.20 1.38 0.10 0.10 0.40 0.67 1.45
12 E D 8 12 1.20 1.38 0.10 0.10 0.40 0.67 1.47
13 E H 8 12 1.20 1.99 0.10 0.14 0.40 0.67 1.32
14 H C 8 12 1.28 1.27 0.14 0.10 0.42 0.67 1.63
15 H D 8 12 1.28 1.27 0.14 0.10 0.42 0.67 1.65
16 H E 8 12 1.40 1.20 0.14 0.10 0.40 0.67 1.68
Table 10: Performed comparisons for the target ship taking over the own ship, dimensionless

32
In figure 21 model H is overtaken by model D (large ship taking over a small ship). This case
shows the most resemblance between computational and experimental results, from the cases in
table 9.
Figure 22 shows the effect of a large ship being taken over by a smaller ship, namely model D
being overtaken by model H. This is also one of the best results from the cases in table 9.
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.06
-0.04
-0.02
0
0.02
0.04 X′n
X′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
Y′n
Y′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.06
-0.04
-0.02
0
0.02
0.04
N′n
N′e
Figure 21: Model H taken over by model D
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
X′n
X′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.06
-0.04
-0.02
0
0.02
0.04
Y′n
Y′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
N′n
N′e
Figure 22: Model D taken over by model H

33
More two situations are given in figures 23 and 24. The first one represents model E being
overtaken by model H. This case shows no good quantitative agreement but the graphs do have a
very similar shape (especially for sway and yaw). The computational surge force shows, like in
some of the cases where the own ship was overtaking, a local minimum and maximum, which are
not present in the experimental data.
The second one represents model E going at 4 knots, being overtaken by model D at 12 knots.
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
X′n
X′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Y′n
Y′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
N′n
N′e
Figure 23: Model E taken over by model H
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
X′n
X′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
Y′n
Y′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
N′n
N′e
Figure 24: Model E (4 knots) taken over by
model D

34
The two following situations shown (figures 25 and 26) coincide a lot less. In these cases, ship D
was overtaken by ship E. In the first graph with a very small clearance (10.31 metres), in the
second graph with a rather large clearance with respect to the other cases (41.25 metres).
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.1
-0.05
0
0.05
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
N′n
N′e
Figure 25: Model D taken over by model E
with 10.31 metres of clearance
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.02
0
0.02
0.04
0.06
N′n
N′e
Figure 26: Model D taken over by model E
with 41.25 metres of clearance
Figure 27 shows E taken over by C, also this comparison shows strong discrepancies between
computational and experimental data.

35
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
N′n
N′e
Figure 27: Model E taken over by model C
Using the same system as before, table 11 was obtained for the comparison results.

36
The results for these cases (own ship overtaken) are slightly better then in the previous cases (own
ship is overtaking). Surge and yaw show a lot of qualitative good results with a few quantitative
good results as well. Sway comparisons still show a lot of discrepancies, but some better results
are also obtained. Noticeable is also that most of the good results obtained are from cases which
involve the smaller ship H.
Target Ship takes over Own Ship
Ships Speeds Clearance Results
Own Target
Own (knots)
Target (knots)
ybb (m)
surge sway yaw
1 D C 8 12 18.9 V X V
2 D E 8 12 20.63 V X X
3 D E 8 12 10.31 V X X
4 D E 8 12 41.25 V X X
5 D E 8 12 82.5 V X X
6 D E 8 12 123.75 X X V
7 D E 8 12 165 X X X
8 D H 8 12 11.1 VV V V
9 E D 0 12 20.63 V V V
10 E D 4 12 20.63 V V V
11 E C 8 12 18.9 X X V
12 E D 8 12 20.63 V X V
13 E H 8 12 11.1 V V V
14 H C 8 12 18.9 V X VV
15 H D 8 12 20.63 VV VV VV
16 H E 8 12 23.4 V X VV
No. of X 3 11 5
No. of V 11 4 8
No. of VV 2 1 3
Total 16 16 16
Table 11: Comparisons for target ship taking over the own ship: evaluation
7.2.1 Surge In the surge case both the computational data as the experimental data show at first a peak of an
additional resistance force, followed by a peak of an additional propulsive force. For the
computational data the absolute values for both peaks are more or less equal. In the experimental
data the resistance peak is mostly larger then the propulsive peak. Comparing computational with
experimental, there is mostly an underestimation of the first peak and a more or less equal result
for the second peak.
7.2.2 Sway For the sway force there is an initial small peak of repulsion, followed by a large peak of attraction,
followed by repulsion once again. Like in surge, the computational results are much more
symmetric showing two equal peaks of repulsion. In the experimental results this first repulsive

37
peak is mostly a lot larger. In general the computational values of the attractive peaks are quite
close to the experimental value. The shape of the graph however, and the value of the first peak
are mostly not equal.
7.2.3 Yaw Sway results show at first that the bow is repulsed, followed by an attractive moment. The trend for
these comparisons is the same as for sway and surge, namely that both peaks in the
computational results have almost an equal absolute value. In contrary to the experimental results
in which the first peak has a larger value. This makes that the computational value for the first
peak is underestimated, but that the value for the second peak is mostly quite equal.
7.3 Encounter The number of encounter cases is larger then in previous sections, they are listed in table 12 and in
dimensionless form in table 13.

38
ENCOUNTER
Ships Speeds Drafts Clearance Depth
Own Target Own
(knots) Target (knots)
Own (m)
Target (m)
ybb (m)
h (m)
1 D E 8 8 13.5 15.53 20.63 18.63
2 D E 8 8 13.5 15.53 10.31 18.63
3 D E 8 8 13.5 15.53 41.25 18.63
4 D E 8 8 13.5 15.53 82.5 18.63
5 D E 8 8 13.5 15.53 123.75 18.63
6 D E 8 8 13.5 15.53 165 18.63
7 D E 8 8 13.5 15.53 206.25 18.63
8 D C 12 0 13.5 13.5 18.9 17.08
9 D C 12 12 13.5 13.5 18.9 17.08
10 D E 12 0 13.5 15.53 20.63 18.63
11 D E 12 12 13.5 15.53 20.63 18.63
12 D H 12 12 13.5 9.38 11.1 17.08
13 E D 0 8 15.53 13.5 20.63 18.63
14 E D 4 8 15.53 13.5 20.63 18.63
15 E D 8 0 15.53 13.5 20.63 18.63
16 E D 8 4 15.53 13.5 20.63 18.63
17 E D 8 8 15.53 13.5 20.63 18.63
18 E D 8 12 15.53 13.5 20.63 18.63
19 E C 12 0 15.53 13.5 18.9 18.63
20 E C 12 12 15.53 13.5 18.9 18.63
21 E D 12 8 15.53 13.5 20.63 18.63
22 E D 12 12 15.53 13.5 20.63 18.63
23 E D 12 12 15.53 13.5 20.63 17.08
24 E D 12 12 15.53 13.5 20.63 23.04
25 E H 12 12 15.53 9.38 11.1 18.63
26 H C 8 0 13.35 13.5 18.9 17.08
27 H C 8 4 13.35 13.5 18.9 17.08
28 H C 8 8 13.35 13.5 18.9 17.08
29 H C 8 12 13.35 13.5 18.9 17.08
30 H C 12 12 13.35 13.5 18.9 17.08
31 H D 12 12 13.35 13.5 20.63 18.63
32 H E 12 12 13.35 15.53 23.4 18.63
Table 12: Performed comparisons for encounter

39
Parameters Dimensionless Parameters
Ships Speeds Depth Froude Nr Speed Transverse
Distance
Own Target
Own (knots)
Target (knots)
own Target Own
length Target length
Depth h Own/
Target η'
1 D E 8 8 1.38 1.20 0.077 0.078 0.30 1.00 1.47
2 D E 8 8 1.38 1.20 0.077 0.078 0.30 1.00 1.23
3 D E 8 8 1.38 1.20 0.077 0.078 0.30 1.00 1.94
4 D E 8 8 1.38 1.20 0.077 0.078 0.30 1.00 2.87
5 D E 8 8 1.38 1.20 0.077 0.078 0.30 1.00 3.81
6 D E 8 8 1.38 1.20 0.077 0.078 0.30 1.00 4.75
7 D E 8 8 1.38 1.20 0.077 0.078 0.30 1.00 5.68
8 D C 12 0 1.27 1.27 0.116 0.114 0.48 ∞ 1.48
9 D C 12 12 1.27 1.27 0.116 0.114 0.48 1.00 1.48
10 D E 12 0 1.38 1.20 0.116 0.116 0.46 ∞ 1.47
11 D E 12 12 1.38 1.20 0.116 0.116 0.46 1.00 1.47
12 D H 12 12 1.27 1.82 0.116 0.153 0.48 1.00 1.35
13 E D 0 8 1.20 1.38 0.078 0.077 0.30 0 1.47
14 E D 4 8 1.20 1.38 0.067 0.067 0.26 0.50 1.47
15 E D 8 0 1.20 1.38 0.078 0.077 0.30 ∞ 1.47
16 E D 8 4 1.20 1.38 0.067 0.067 0.26 2.00 1.47
17 E D 8 8 1.20 1.38 0.078 0.077 0.30 1.00 1.47
18 E D 8 12 1.20 1.38 0.103 0.102 0.40 0.67 1.47
19 E C 12 0 1.20 1.38 0.116 0.114 0.46 ∞ 1.45
20 E C 12 12 1.20 1.38 0.116 0.114 0.46 1.00 1.45
21 E D 12 8 1.20 1.38 0.103 0.102 0.40 1.50 1.47
22 E D 12 12 1.20 1.38 0.116 0.116 0.46 1.00 1.47
23 E D 12 12 1.10 1.27 0.116 0.116 0.48 1.00 1.47
24 E D 12 12 1.48 1.71 0.116 0.116 0.41 1.00 1.47
25 E H 12 12 1.20 1.99 0.116 0.153 0.46 1.00 1.32
26 H C 8 0 1.28 1.27 0.102 0.076 0.32 ∞ 1.63
27 H C 8 4 1.28 1.27 0.088 0.066 0.28 2.00 1.63
28 H C 8 8 1.28 1.27 0.102 0.076 0.32 1.00 1.63
29 H C 8 12 1.28 1.27 0.135 0.101 0.42 0.67 1.63
30 H C 12 12 1.28 1.27 0.153 0.114 0.48 1.00 1.63
31 H D 12 12 1.40 1.38 0.153 0.116 0.46 1.00 1.65
32 H E 12 12 1.40 1.20 0.153 0.116 0.46 1.00 1.68
Table 13: Performed comparisons for encounter: dimensionless
The different situations covered in the encounter cases are more various then the overtake cases:
the speeds vary between 0 and 12 knots and more combinations at different speed are made. In
the case of two ships encountering both at 12 knots, surface effects can have a strong influence on
the interaction forces.

40
One of the best results is model E encountering model D, in which E is the own ship going at 4
knots, and D goes at 8 knots. Results are given in figure 28. The second case shown (figure 29) is
model H encountering model C, respectively at 8 and 12 knots.
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.02
0
0.02
0.04
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
N′n
N′e
Figure 28: Model E (own ship) at 4 knots
encountering model D at 8 knots
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.02
0
0.02
0.04
0.06
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
N′n
N′e
Figure 29: Model H (own ship) at 8 knots
encountering model C at 12 knots
Other good results are given in figures 30 and 31. The first case is model E encountering model H,
both at twelve knots, with E the own ship. The experimental values for the surge force are
distorted by noise, but the trend is clear. The second comparison is model E (own ship)
encountering model D, both at 8 knots.

41
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
N′n
N′e
Figure 30: Model E (own ship) at 12 knots
encountering model H at 12 knots
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
X′n
X′e
ξ′s,n
, ξ′s,e
Y′ n
,Y
′ e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Y′n
Y′e
ξ′s,n
, ξ′s,e
-2 -1 0 1 2-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
N′n
N′e
Figure 31: Model E (own ship) at 8 knots
encountering model D at 8 knots
Large discrepancies are mostly present when the interaction forces are quite low. For instance in
the cases with a large clearance (165, 206, … meters) or in cases where the target ship has zero
speed. An example is shown in figure 32, where model D takes over model E, in which D (own
ship) goes at twelve knots and E at zero knots. Most other cases where the target ship has zero
speed are similar and show the same unconformity between experimental and computational data.

42
One of the least good comparisons (excluding the cases with zero target ship speed and large
clearance) is shown in figure 33. Model E is encountering model C, both at 12 knots. Although it is
one of the less good ones, the computational results are still quite good, and certainly a lot better
then some of the overtake comparisons.
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.01
-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.004
-0.002
0
0.002
0.004
0.006
0.008
N′n
N′e
Figure 32: Model D (own ship) at 12 knots
encountering model E at 0 knots
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.02
0
0.02
0.04
0.06
N′n
N′e
Figure 33: Model E (own ship) at 12 knots
encountering model C at 12 knots
A last case shows a very good agreement in the sway force. It is model H encountering with model
C, both at 8 knots.

43
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
X′n
X′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
N′n
N′e
Figure 34: Model H (own ship) at 8 knots encountering model C at 8 knots

44
ENCOUNTER
Ships Speeds Clearance Results
Own Target
Own (knots)
Target (knots)
ybb (m)
surge sway yaw
1 D E 8 8 20.63 V V X
2 D E 8 8 10.31 VV V X
3 D E 8 8 41.25 V V V
4 D E 8 8 82.5 V V V
5 D E 8 8 123.75 V V V
6 D E 8 8 165 V V X
7 D E 8 8 206.25 X V X
8 D C 12 0 18.9 X X X
9 D C 12 12 18.9 V V V
10 D E 12 0 20.63 X X X
11 D E 12 12 20.63 VV V V
12 D H 12 12 11.1 VV V V
13 E D 0 8 20.63 VV V VV
14 E D 4 8 20.63 VV VV VV
15 E D 8 0 20.63 X X X
16 E D 8 4 20.63 X V V
17 E D 8 8 20.63 VV VV V
18 E D 8 12 20.63 VV V VV
19 E C 12 0 18.9 X X X
20 E C 12 12 18.9 X X V
21 E D 12 8 20.63 V V V
22 E D 12 12 20.63 VV V V
23 E D 12 12 20.63 VV V V
24 E D 12 12 20.63 V VV VV
25 E H 12 12 11.1 VV V VV
26 H C 8 0 18.9 X X X
27 H C 8 4 18.9 X VV VV
28 H C 8 8 18.9 V VV VV
29 H C 8 12 18.9 V VV VV
30 H C 12 12 18.9 V V VV
31 H D 12 12 20.63 V V VV
32 H E 12 12 23.4 V V VV
No. of X 9 6 9
No. of V 13 20 12
No. of VV 10 6 11
Total 32 32 32
Table 14: Comparisons for encounter: evaluation
In table 14 is shown that the results are in general a lot better for encounter then for overtake,
showing good agreement between computational and experimental data. A possible explanation
could be found in the Strouhal number. At large Strouhal numbers, viscosity dominates the flow
(Sobey, 1982). When using the relative speed between both ships as characteristic speed, it’s

45
clear that encounter manoeuvres result in smaller Strouhal numbers for encounter then for
overtake.
Drawing general conclusions for surge, sway and yaw is difficult because of the diversity in the
cases. Since the forces are very different when one of both ships has zero speed, following
conclusions will not cover these comparisons.
7.3.1 Surge For most cases, the surge force is increasing while approaching the oncoming ship, meaning that
an additional propulsive force is working on the ship. This is followed by a peak of additional
resistance force. For the experimental data, conclusions on the absolute values of the peaks are
not unambiguous, since sometimes the resistive peak is larger than the propulsive peak,
sometimes the other way around, or sometimes equal. For the computational data however, the
absolute value of both peaks is mostly equal.
An other remark is that the computational data shows in some cases a local minimum and
maximum around zero for the cases when model H is the own ship. These are not present in the
experimental data.
7.3.2 Sway Like in previous sub-section (The own ship overtaken by the target ship), the target ship shows a
repulsive force, followed by an attractive force, and again a repulsive force (with sometimes a local
maximum in the attractive force). Also here the first and second repulsive peaks are mostly equal
in the computational data. For the experimental data however, the peaks are a lot more symmetric
then in the overtake case, resulting in comparisons which match a lot better.
7.3.3 Yaw The yaw force differs depending on the ships involved and the speeds. Successive
periods of bow in and bow out moments are recognizable in the different figures.
In most cases, the own ship endures a bow out moment when approaching and a bow in moment
at the end of the encounter manoeuvre. Independent of the shape of the experimental results, the
different peaks of the yaw moment are calculated very accurately.
7.4 Steady versus Unsteady Taking over and encounter cases are in theory unsteady cases. However, if the relative speed
between both ships is small enough, the manoeuvre can also been seen as a steady manoeuvre.
In the following figures this difference is shown very clearly. The first graph (figure 35) is an
encounter case between model H (own ship) and model C (target ship), both at 8 knots. Figures
36 and 37 show respectively a comparison of model H (own ship) at 8 knots being taken over by
model C at 12 knots and model E (own ship) at 12 knots taking over model D at 8 knots.

46
For the encounter graphs it is clear that the steady results are worse than the unsteady. Probably
this is due to the larger relative speed between both ships.
The results for the overtake cases are more inconsistent. The two cases show that when model H
(own ship) is taken over by model C, the steady results are worse then the unsteady. But when
model E is taking over model D, the steady results show a better approximation then the unsteady
results.
ξ′s,unst
, ξ′s,e
, ξ′s,st
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
SteadyExperimentalUnsteady
ξ′s,unst
, ξ′s,e
, ξ′s,st
Y'
-1.5 -1 -0.5 0 0.5 1 1.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Steady
ExperimentalUnsteady
ξ′s,unst
, ξ′s,e
, ξ′s,st
N'
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
SteadyExperimentalUnsteady
Figure 35: Model H (own ship) at 8 knots encountering model C at 8 knots

47
ξ′s,unst
, ξ′s,e
, ξ′s,st
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
SteadyExperimentalUnsteady
ξ′s,unst
, ξ′s,e
, ξ′s,st
Y'
-1.5 -1 -0.5 0 0.5 1 1.5-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
SteadyExperimentalUnsteady
ξ′s,unst
, ξ′s,e
, ξ′s,st
N'
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
SteadyExperimentalUnsteady
Figure 36: Model H taken over by model C
ξ′s,unst
, ξ′s,e
, ξ′s,st
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.02
0
0.02
Steady
ExperimentalUnsteady
ξ′s,unst
, ξ′s,e
, ξ′s,st
Y'
-1.5 -1 -0.5 0 0.5 1 1.5-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
SteadyExperimentalUnsteady
ξ′s,unst
, ξ′s,e
, ξ′s,st
N'
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
SteadyExperimentalUnsteady
Figure 37: Model E taking over model D

48
7.5 Influence of the Number of Panels Like explained in chapter 5, the number of panels is rather high on the ship models used in the
previous comparisons. This section compares the results from some experiments using models
with a different number of panels.
Reduction of the number of panels can decrease the time needed to do calculations from few hours
for large number of panels to few minutes, depending on the hardware used. If reducing the
number of panels doesn’t go hand in hand with a drastic reduction in accuracy of the computational
results, it can save a lot of time, both in modelling the ships, as in doing the simulations.
Each of the models was stripped down to four, five or six different models with each a different
number of panels. Three cases were simulated with the different models. The model number 1
indicates the standard number of panels. The cases chosen were cases from which good
comparisons were obtained with the standard number of panels. The first case (figure 41) is an
overtake case, model E at zero speed (own ship) passed by model D at 12 knots (table 15). The
second case (figure 42), also overtake, is model H (own ship) at 8 knots passed by model D at 12
knots (table 16). The third case (figure 43) is an encounter between model E (own ship) and model
D, in which E goes at 4 knots and D at 8 knots (table 17).
Model number Number of panels
E D E D
1 0 932 924
1 1 932 896
2 2 766 722
3 3 618 658
4 4 464 566
5 5 386 464
6 6 316 408
Table 15: Model E (own ship) at 0 knots taken over by model D at 12 knots
Model number Number of panels
H D H D
1 0 736 924
1 1 736 896
3 3 486 658
4 4 418 566
5 6 334 408
Table 16: Model H (own ship) at 8 knots taken over by model D at 12 knots
Model number Number of panels
E D E D
1 1 932 896
2 2 766 772
3 3 618 658
6 6 316 408
Table 17: Model E (own ship) at 4 knots encountering model D at 8 knots

49
Plots from the models E, D and H with different number of panels are shown in figures 38, 39 and
40. To keep the hull model identical to the real models, the panels were mostly removed in the
parallel body. In the fore and the aft the number of removed panels is less.
Figure 38: Model D, upper line, from left to right: model D0 to D2; middle line, from left to right:
model D3 to D5; lower line: model D6

50
Figure 39: Model E, upper line, from left to right: model E1 to E3; lower line, from left to right: model
E4 to E6
Figure 40: Model H, upper line, from left to right: model H1, H3 and H4; lower line: model H5
The results of the comparisons are shown for the overtaking between model E and model D and
the overtaking between model H and model D in respectively figure 41 and figure 42. The results
for the encounter between model E and D are shown in figure 43.
The comparisons show very few differences between the different models. Only in the peaks there
is a visible difference. The values from the models with reduced number of panels are then more
or less 5% smaller in the worst cases. The findings in Sutulo S., Guedes Soares C. (2010) are
thus confirmed by this case.

51
ξ′s
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Exp1E0D1E1D
2E2D3E3D4E4D5E5D6E6D
ξ′s
Y'
-1.5 -1 -0.5 0 0.5 1 1.5-0.15
-0.1
-0.05
0
0.05
0.1
Exp1E0D1E1D
2E2D3E3D4E4D5E5D6E6D
ξ′s
N'
-1.5 -1 -0.5 0 0.5 1 1.5-0.03
-0.02
-0.01
0
0.01
0.02
0.03 Exp1E0D1E1D2E2D3E3D4E4D5E5D6E6D
Figure 41: Model E (own ship) at 0 knots
overtaken by model D at 12 knots
ξ′s
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
Exp1H0D1H1D3H3D4H4D5H6D
ξ′s
Y'
-1.5 -1 -0.5 0 0.5 1 1.5-0.15
-0.1
-0.05
0
0.05
0.1
Exp1H0D1H1D3H3D4H4D5H6D
ξ′s
N'
-1.5 -1 -0.5 0 0.5 1 1.5-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
Exp1H0D1H1D3H3D4H4D5H6D
Figure 42: Model H (own ship) at 8 knots
overtaken by model D at 12 knots

52
ξ′s
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Exp1E1D2E2D3E3D4E4D
ξ′s
Y'
-1.5 -1 -0.5 0 0.5 1 1.5-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Exp1E1D2E2D3E3D4E4D
ξ′s
N'
-1.5 -1 -0.5 0 0.5 1 1.5-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Exp1E1D2E2D3E3D4E4D
Figure 43: Model E (own ship) at 4 knots encountering model D at 8 knots
7.6 Influence of the Time Step All computational results demonstrated previously have been calculated with a time step of one
second. A case with minimum clearance and large speeds has been chosen to investigate the
influence of this time step. For the encounter between model D and model H, both at 12 knots and

53
with model D as the own ship, the time step has been reduced to 0.5 seconds, increasing with this
the accuracy of the unsteady calculations, but also doubling the calculation time. The results are
shown in figure 44 for the experimental results, the computational results with an interval of one
second and the computational results with an interval of half a second. Although the graphs are
not completely the same, they are very similar.
ξ′s
X'
-1.5 -1 -0.5 0 0.5 1 1.5-0.015
-0.01
-0.005
0
0.005
0.01
0.015
1 secondExperimental
1/2 Second
ξ′s
Y'
-1.5 -1 -0.5 0 0.5 1 1.5-0.15
-0.1
-0.05
0
0.05
0.11 second
Experimental
1/2 Second
ξ′s
N'
-1.5 -1 -0.5 0 0.5 1 1.5-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
1 second
Experimental
1/2 Second
Figure 44: Model D (own ship) encountering model H, both at 12 knots
54
Chapter 8: Conclusions The interaction effects between ships are not to be underestimated. Operating large ships near
each other or near other objects can have dangerous consequences if neglecting these effects.
Experimental test programs like Vantorre et al. (2002) give a better insight in the physical
processes, and in the sequence of interaction forces. Prediction codes based on physical and
mathematical principles as in Sutulo and Guedes Soares (2008) are made to estimate the forces
that will be encountered. The process of validating this - and similar - prediction codes is however
extensive. The Sutulo and Guedes Soares code covers a lot of possibilities: shallow or deep
water, different number of objects, the directions, the speeds, …
This thesis was written to cover a part of this validating process, namely by comparing an extensive
set of encounter and overtake cases between two ships in shallow water, at speeds between 0 and
12 knots, at clearances between 0.25 times the beam and 5 times the beam of one of the ships,
and for four different ship models.
In the comparisons made, good results are obtained. However, also larger discrepancies are
present. One of the main trends noticed is that symmetry plays a big role. The computational
results are mostly very symmetrical, either around the vertical axis or around the origin. The
experimental results contain also a lot of non-symmetrical results. When this is the case, the
comparisons between computational and experimental results mostly shows discrepancies. An
other important result is that encounter cases show results which are a lot better then overtake
cases.
The origin for the discrepancies could be situated in the differences between the experimental
setup and the computational setup. First, both ships were free to heave and pitch in the
experiments. In the interaction code, the ships only had a surge motion. Probably more important
is the presence of a rudder and a propeller on the own ship, causing a wake behind the own ship.
It’s noticeable in the results that when the own ship takes over the target ship, the discrepancies in
surge and yaw happen mostly in the second half of the manoeuvre (ξ > 0) when the influence from
the wake on the target ship is increasing. The same discrepancy is noticed when the target ship
takes over the own ship, exposing larger discrepancies in the first half of the manoeuvre.
Two cases exist in which this problem is neutralised, namely when the own ship has zero speed.
The first one is the encounter manoeuvre between model E and model D, in which model E is the
own ship and model D goes at 8 knots. Comparing this situation to two identical situations but with
model E at 4, respectively at 8 knots shows no particularly better results for the case when E has
zero speed (figures present on the CD). The second case is the overtake manoeuvre when model
D at 12 knots takes over model E. The graphs for this case show small discrepancies in the first
parts of the graphs. However, the same situation, but with model E at 4 knots, shows the same

55
discrepancies, and the same situation with model E at 8 knots shows larger discrepancies, but in
the whole simulation, which thus can not be traced back to propeller action. (figures in appendix I).
It might be possible to simulate the propeller as a disk of sinks and sources. However, by the time
this thesis was written, this feature was not yet available in the interaction code.
An other important difference is surface effects which are not taken into account by the interaction
code. The experimental cases covered in this thesis are, according to the ITTC, shallow water
cases (1.2 < h/T < 1.5) and one very shallow water case (h/T < 1.2) if the ship with the largest
draught is considered. Like noticed in Pinkster (2004) the surface effects are more important in
shallow water. One of the consequences for instance is that wave effects are increased. A
comparison for the case when model E (own ship) encounters model D in three different water
depths is shown in appendix II where especially in sway and yaw the experimental and
computational results match better at larger water depths.
Also the effects of viscosity are not taken into account, neglecting by this the boundary layer
influence. Sutulo, Guedes Soares and Otzen (2010) mention the friction resistance at small
horizontal clearance and viscous blockage. The effect of the horizontal clearance is more difficult
to discover in the results. Three cases are available to investigate the influence of the horizontal
clearance (on the CD):
• Encounter between model D (own ship) and model E, both at 8 knots
• Model D (own ship) taking over model E
• Model D (own ship) taken over by model E
In these three cases, the set of experiments contains following horizontal clearances:
• 0.25 times the beam of model D (10.31 m)
• 0.5 times the beam of model D (20.63 m)
• 1.0 times the beam of model D (41.25 m)
• 2.0 times the beam of model D (82.50 m)
• 3.0 times the beam of model D (123.75 m)
• 4.0 times the beam of model D (165 m)
• 5.0 times the beam of model D (206.25 m; only encounter)
After comparing these experiments, the conclusion is that there is no clear trend (neither for surge,
sway and yaw) in the discrepancies with increasing distance.
It’s possible to take the effects neglected with potential flow theory into account. For instance with
special adaptations to free surface effects like Pinkster (2004), or with Navier-Stokes based
equations like Huang and Chen (2006). They allow more detailed calculations by taking more of
the mentioned fluid processes into account but for this, the fast calculating efficiency of the
potential flow interaction code has to be sacrificed.

56
The interaction forces depend on multiple parameters and the large variation of these in the
experiments has made it possible to create a diverge database of computational and experimental
comparisons. This gives opportunities to use this data in future validation processes to compare
with. More investigation will be necessary to validate on one side the potential flow code, and on
the other side to confirm the trends pointed out in this thesis.

57
References ABKOWITZ, M.A.; ASHE, G.M.; FORTSON, R.M. (1976), Interaction effects of ships operating in proximity in deep and shallow water, 11
th ONR symposium on naval hydrodynamics, London
BRIX, J. (1993), Manoeuvring Technical Manual, Seehafen Verlag, Hamburg DAND, I.W. (1981) , Some measurements of interaction between ship models passing on parallel courses, Nat. Maritime Inst. Report R 108 DE DECKER, B (2006), Ship – ship interaction during lightering operations, Master thesis Ghent University GRONARZ, A (unknown), Numerische und Experimentelle Untersuchung der Wechselwirkung beim Schiffsbegegnen und überholen auf der Binnenwasserstraße HESS, J.L.; SMITH, A.M.O (1964), Calculation of Nonlifting Potential Flow About Arbitrary Three-Dimensional Bodies, J. Ship Res. HUANG, E.T.; CHEN, H-C (2006), Passing ship effects on moored vessels at piers, Proceedings prevention first 2006 symposium, Long Beach, California
ITTC: Final report and recommendations to 23rd
ITTC of the manoeuvring committee. KING, G., W. (1977), Unsteady hydrodynamic interactions between ships in shallow water, Journal of Ship Research, Vol. 21, No. 3, Sept. 1977 KOLKMAN, P.A. (1978), Ships meeting and generating current, Symposium on ‘Aspects of Navigability of Constraint Waterways, including Harbour Entrances, Delft, 1978 KYULEVCHELIEV, S; GEORGIEV, S.; IVANOV, I. (2003), Hydrodynamic interaction between moving and stationary ship in a shallow canal, Third International conference on port development and coastal environment PDCE 2003, Varna, Bulgaria LAMB, H. (1968), Hydrodynamics, Dover Pub. NORRBIN, N (1975), Manoeuvring in confined waters: interaction phenomena due to side banks or other ships, 14
th international towing tank conference 1975
PINKSTER (2004), The influence of a free surface on passing ship effects, International Shipbuilding Progress, Vol. 51, No. 4 REMERY, G. F. M. (1974), Mooring forces induced by passing ships, Offshore technology conference 1974 SOBEY, I. (1982), Oscillatory flows at intermediate Strouhal number in asymmetry channels, Journal of Fluid Mechanics 125 SUTULO, S. (1999), Basics of Ship Manoeuvrability, Instituto Superior Técnico lecture notes SUTULO, S.; GUEDES SOARES, C. (2008), Simulation of the Hydrodynamic Interaction Forces in Close-Proximity Manoeuvring, Proceedings of the 27
th Annual International Conference on
Offshore Mechanics and Arctic Engineering (OMAE 2008), Estoril, Portugal. SUTULO, S.; GUEDES SOARES, C. (2009), Simulation of Close-Proximity Maneuvres Using an Online 3D Potential Flow Method, Proceedings of International Conference on Marine Simulation and Ship Manoeuvrability MARSIM 2009, Panama City, Panama

58
SUTULO, S.; GUEDES SOARES, C.; OTZEN J. (2010), validation of potential-flow estimation of interaction forces acting upon ship hulls in side-to-side motion at low Froude number, submitted for publication TUCK E.O.; NEWMAN J.N. (1974), Hydrodynamic Interactions between Ships, Proc. 10
th
Symposium on Naval Hydrodynamics, Cambridge, Mass., USA VANTORRE, M.; LAFORCE, E; VERZHBITSKAYA, E (2002), Model test based formulations of ship-ship interaction forces, Ship Technology Research Vol. 49 – 2002 VANTORRE, M (2008/2009), Inleiding tot de maritieme techniek, Ghent University lecture notes (in Dutch) VARYANI, K. S.; McGREGOR R. ; WOLD. P (1998), Interactive forces and moments between several ships meeting in confined waters, Elsevier science Ltd. VARYANI, K.S. (2004), Practicality of calculations of interaction forces between moored ship and passing ship and between static berth and moving ship, VARYANI, K.S.; VANTORRE, M. (2005), Development of New Generic Equation for Interaction Effects on A Moored Container Ship Due to Passing Bulk Carrier, Vol. 147, IJMW Part A2, June 2005 11. YEUNG, R.W. (1977), On the interactions of slender ships in shallow water. Submitted J. Fluid Mech.
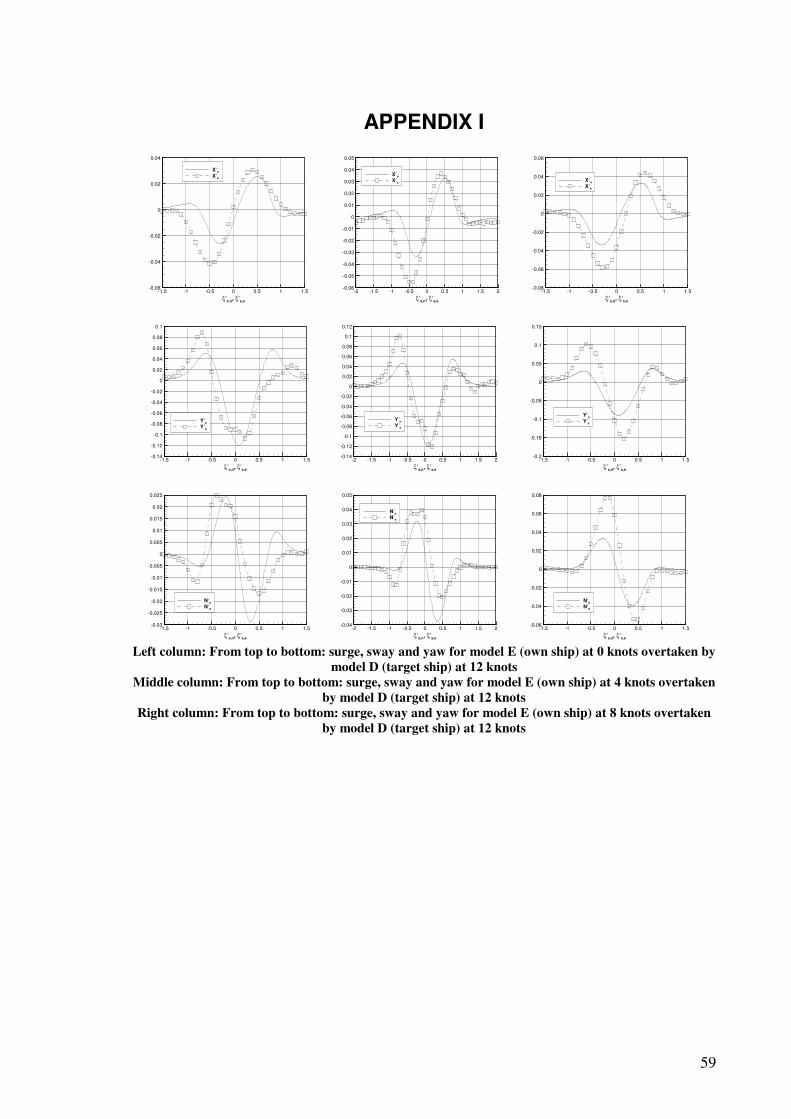
59
APPENDIX I
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
X′nX′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
X′nX′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
X′nX′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
Y′n
Y′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
Y′nY′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Y′n
Y′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
N′nN′e
ξ′s,n
, ξ′s,e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
N′nN′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
N′nN′e
Left column: From top to bottom: surge, sway and yaw for model E (own ship) at 0 knots overtaken by
model D (target ship) at 12 knots
Middle column: From top to bottom: surge, sway and yaw for model E (own ship) at 4 knots overtaken
by model D (target ship) at 12 knots
Right column: From top to bottom: surge, sway and yaw for model E (own ship) at 8 knots overtaken
by model D (target ship) at 12 knots

60
APPENDIX II
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
X′nX′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
X′nX′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
X′nX′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Y′nY′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
Y′nY′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
Y′nY′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
N′nN′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.04
-0.02
0
0.02
0.04
0.06
N′nN′e
ξ′s,n
, ξ′s,e
-1.5 -1 -0.5 0 0.5 1 1.5-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
N′nN′e
From top to bottom: surge, sway and yaw for model E (own ship) at 12 knots encountering model D
(target ship) at 12 knots
Left column: Water depth h = 17.08 metres
Middle column: Water depth h = 18.63 metres
Right column: Water depth h = 23.04 metres