USU Quadcopter Development Group
10
USU Quadcopter Development Group ECE 4083 - December 2014 Proposal for QUADCOPTER CHASE CAMERA Jacob Rice – Cameron Madsen – Dorothy Peacock
Transcript of USU Quadcopter Development Group
USU Quadcopter Development Group
ECE 4083 - December 2014
Proposal for
QUADCOPTER CHASE CAMERA
Jacob Rice – Cameron Madsen – Dorothy Peacock
Jacob Rice – Cameron Madsen – Dorothy Peacock 1
TABLE OF CONTENTS
I. PROJECT SUMMARY .................................................................................................... 2
II. INTRODUCTION ............................................................................................................ 3
III. PROBLEMS .................................................................................................................... 4
IV. OBJECTIVES .................................................................................................................. 4
V. SOLUTION .............................................................. ERROR! BOOKMARK NOT DEFINED.
VI. RESOURCES ........................................................... ERROR! BOOKMARK NOT DEFINED.
VII. SCHEDULE ............................................................. ERROR! BOOKMARK NOT DEFINED.
VIII. QUALIFICATIONS ................................................... ERROR! BOOKMARK NOT DEFINED.
IX. MANAGEMENT ..................................................... ERROR! BOOKMARK NOT DEFINED.
X. COST ...................................................................... ERROR! BOOKMARK NOT DEFINED.
XI. RESOURCES ........................................................... ERROR! BOOKMARK NOT DEFINED.
Jacob Rice – Cameron Madsen – Dorothy Peacock 2
I. PROJECT SUMMARY
Purpose Many modern cameras capture video from a mounted point-of-view and involve the user physically
controlling the camera. In order to capture precise events, this user has to typically hold or mount the
camera manually to the desired point-of-view. This proves problematic when the user needs to engage
in hands-free activities and needs the moment visually preserved without an extra set of hands. We
provide the solution to this problem: the extra set of hands, our Quadcopter Chase Camera.
Result We shall re-innovate filming techniques by creating a machine that can accurately capture real-time
experiences through an aerial perspective. The Quadcopter Chase Camera will be a product that
liberates its users from having to remotely control the hardware. This camera will capture the desired
image autonomously via a Quadcopter body and GPS system.
Key Components Targeting the key components of the camera maps how our project will ensure good engineering ethics
and practice. These primary targets involve calibrating and addressing components associated with the
vision, mobility, and direction of our automatic camera.
Budget & Schedule We anticipate spending about $1000 total on this project and are collectively taking responsibility for
our assigned tasks. Each team member expects to spend around 100+ hours of labor – individually – on
our Quadcopter Chase Camera.
Success Blueprint The Quadcopter Chase Camera is blueprinted for success as long as we adhere to the schedule, have all
the parts necessary and available, and regard damage prevention with high priority. All of our
components have been tested and tried by users and proves a simple design, installation, and
calibration for our Quadcopter Chase Camera.

Jacob Rice – Cameron Madsen – Dorothy Peacock 3
II. INTRODUCTION
Who We Are & What We Do The USU Quadcopter Development Group was founded in the fall of 2014 with the mission of bringing
high quality autonomous vehicles as a viable method for aerial action filming. With an extensive
background in engineering, our team re-innovates picture-taking by creating a machine that can
accurately capture its desired scene through the third person’s perspective. The USU Quadcopter
Development Group creates autonomous solutions to everyday problems.
Target Audience The Quadcopter Chase Camera is a product targeted towards action sports networks to the average
filming hobbyist who desire the autonomous mobility it offers. Our Chase Camera is desired for its
autonomous mobility and unique filming perspective. This product’s hands-free capabilities liberate its
users from the stress of manually filming events and subjects – in order to produce the desired capture
autonomously.
Process Our team is confident that this product will prove successful by practicing ethical engineering methods
and follow timely deadlines. This report provides the solutions for our project’s problems and pertinent
constituents required to make the Quadcopter Chase Camera a successful product.

Jacob Rice – Cameron Madsen – Dorothy Peacock 4
III. PROBLEM
Modern Filming Constraints The introduction of small compact video cameras and smart phones, more and more people are filming
and taking pictures. The GoPro has added another dimension to capturing images, allowing a type of
hands-free capability in the last decade. People are always looking for different methods to mount their
cameras to capture their desired scene. Modern technology is keeping up with the trends. Our team is
introducing a new GPS vantage point technologies that allow for autonomous video capture.
Quadcopter as Solution Quadcopters have become increasingly popular because of their stability and piloting ease. Quadcopters
and cameras have been integrated before, but they have not integrated autonomous capabilities. The
Quadcopter will broaden its audience to the sports realm. Our Quadcopter will automatically follow the
targeted individual needed to film, allowing sports cameras and sports enthusiasts to film their activity
without the stress of piloting the copter.
This project will provide the solution for hands-free autonomous video capture, specialized in following
a target at a set distance apart and a set elevation above in aerial action.
IV. OBJECTIVES The Quadcopter Chase Cam allows the user to be filmed from the desired angle without the help of
piloting hands. Our design features a camera that will attach to the bottom of a Quadcopter. Both the
Quadcopter and the person being filmed will be equipped with a GPS. The Quadcopter is programmed
to follow the designated person at a certain distance through an open field to film the person in action.
In order to be successful the device would need to be user-friendly and produce quality video. It would
also need to be durable. The most important feature of our solution is the design of our copter. The
design implemented provides the hardware we need in order to meet our objectives.

Jacob Rice – Cameron Madsen – Dorothy Peacock 5
V. SOLUTION
DESIGN The Quadcopter Chase Camera will have capabilities for automatic direct image captivation. It will
feature a camera, flight control system, and an external GPS & antenna module in the hardware of the
quadcopter.
Vision Our design features a GoPro camera that attaches to the bottom of the quadcopter’s frame. The camera
features a sensor at 11MP, 1920X1080 video resolution, time lapse settings with a self-timer, 2.5 hours
of battery life, video recording of 30-60FPS, and 170° lens frame view.
Mobility The quadcopter needs to have the ability to follow its subject (the user) in order to capture a picture.
For this case, my team decided to buy the Quadcopter Frame Xcopter from the FLYINGHUNTER
quadcopter kit series. This quadcopter is the best choice for our robot. Our quadcopter is suitable for
easy aerial flight movement, simple repairs, and low flying costs. Our model has been proved to have a
user-friendly design, supports the controller & GPS system we need to provide it direction.
Fig 1. Snapshot of the FLYINGHUNTER QUAD X 500B Xcopter
Direction The more complicated part of our project, integrating and calibrating the control system, will be our
primary focus. We have to be able to attach the camera, GPS, telemetry, receiver, transmitter, and
compass mechanisms to the frame of our copter in order for it to function correctly. In addition, the
user will need to have an equipped GPS & antenna module. These are the main components that will
give our copter the ability to calibrate the correct direction the user wants to capture. Our control
system can be best laid out in this infographic from APM Copter’s website:

Jacob Rice – Cameron Madsen – Dorothy Peacock 6
Fig 2. Snapshot of the Advanced Pixhawk Quadcopter Wiring Chart
Jacob Rice – Cameron Madsen – Dorothy Peacock 7
VI. RESOURCES
Professors All members of the Quadcopter Development Group are students at Utah State University. This gives
the group access to university professors that can give suggestions and help with any possible problems
that may arise during development.
Tools As students the group also has access to engineering physical facilities with power supplies,
oscilloscopes, multimeters, computers, software, and other tools that will make production of the
quadcopter possible.
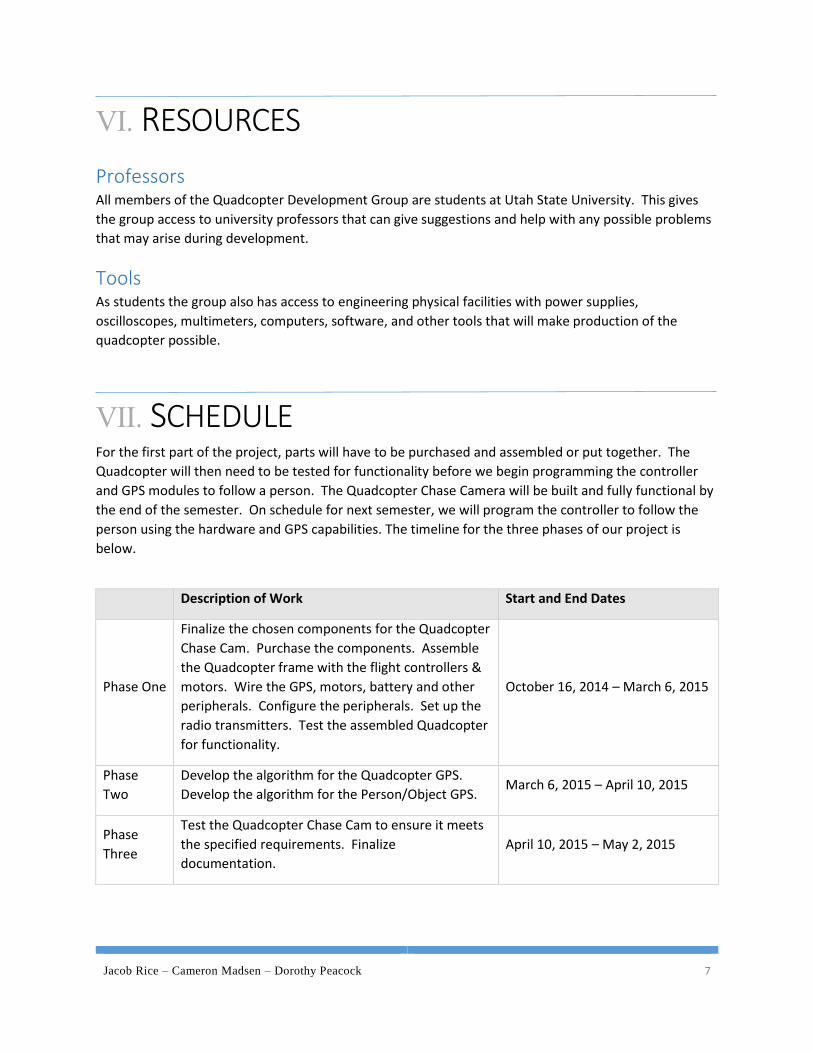
VII. SCHEDULE For the first part of the project, parts will have to be purchased and assembled or put together. The
Quadcopter will then need to be tested for functionality before we begin programming the controller
and GPS modules to follow a person. The Quadcopter Chase Camera will be built and fully functional by
the end of the semester. On schedule for next semester, we will program the controller to follow the
person using the hardware and GPS capabilities. The timeline for the three phases of our project is
below.
Description of Work Start and End Dates
Phase One
Finalize the chosen components for the Quadcopter
Chase Cam. Purchase the components. Assemble
the Quadcopter frame with the flight controllers &
motors. Wire the GPS, motors, battery and other
peripherals. Configure the peripherals. Set up the
radio transmitters. Test the assembled Quadcopter
for functionality.
October 16, 2014 – March 6, 2015
Phase
Two
Develop the algorithm for the Quadcopter GPS.
Develop the algorithm for the Person/Object GPS. March 6, 2015 – April 10, 2015
Phase
Three
Test the Quadcopter Chase Cam to ensure it meets
the specified requirements. Finalize
documentation.
April 10, 2015 – May 2, 2015
Jacob Rice – Cameron Madsen – Dorothy Peacock 8
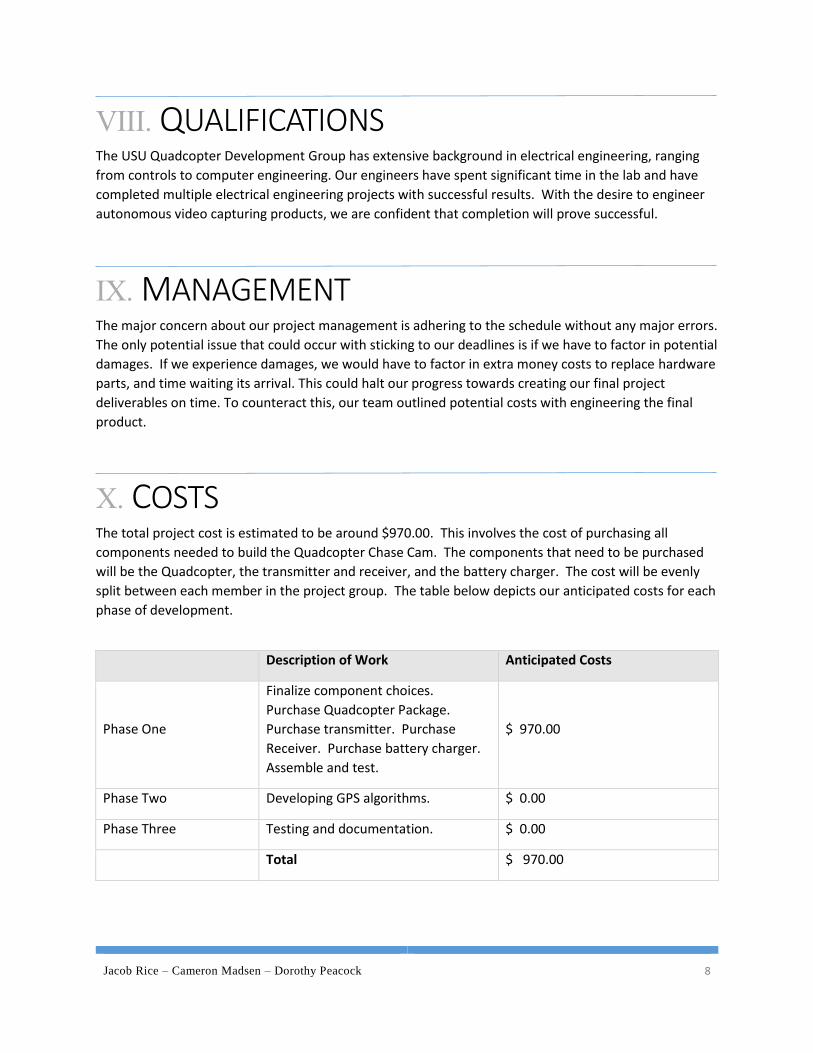
VIII. QUALIFICATIONS The USU Quadcopter Development Group has extensive background in electrical engineering, ranging
from controls to computer engineering. Our engineers have spent significant time in the lab and have
completed multiple electrical engineering projects with successful results. With the desire to engineer
autonomous video capturing products, we are confident that completion will prove successful.
IX. MANAGEMENT The major concern about our project management is adhering to the schedule without any major errors.
The only potential issue that could occur with sticking to our deadlines is if we have to factor in potential
damages. If we experience damages, we would have to factor in extra money costs to replace hardware
parts, and time waiting its arrival. This could halt our progress towards creating our final project
deliverables on time. To counteract this, our team outlined potential costs with engineering the final
product.
X. COSTS The total project cost is estimated to be around $970.00. This involves the cost of purchasing all
components needed to build the Quadcopter Chase Cam. The components that need to be purchased
will be the Quadcopter, the transmitter and receiver, and the battery charger. The cost will be evenly
split between each member in the project group. The table below depicts our anticipated costs for each
phase of development.
Description of Work Anticipated Costs
Phase One
Finalize component choices.
Purchase Quadcopter Package.
Purchase transmitter. Purchase
Receiver. Purchase battery charger.
Assemble and test.
$ 970.00
Phase Two Developing GPS algorithms. $ 0.00
Phase Three Testing and documentation. $ 0.00
Total $ 970.00
Jacob Rice – Cameron Madsen – Dorothy Peacock 9
XI. REFERENCES "Advanced Pixhawk Quadcopter Wiring Chart." ArduCopter . N.p., n.d. Web. Oct. 2014.
"Buy FLYINGHUNTER QUAD X 500B Quadcopter Frame Xcopter Multicopter Aircraft Kit from Reliable Aircraft Kits Suppliers on Multi -rotors Shop." Aliexpress.com . N.p., n.d. Web. Oct. 2014.