
Using an Electromagnetic and Acoustic Sensing Device to Determine Direction and Range Part of the...
12
Using an Electromagnetic and Acoustic Sensing Device to Determine Direction and Range Part of the Intelligent Ground Vehicle Project Maria Pacana
-
date post
22-Dec-2015 -
Category
Documents
-
view
218 -
download
0
Transcript of Using an Electromagnetic and Acoustic Sensing Device to Determine Direction and Range Part of the...

Using an Electromagnetic and Acoustic Sensing Device to
Determine Direction and Range Part of the Intelligent Ground
Vehicle ProjectMaria Pacana
Objective
• The implementation of an electromagnetic and acoustic sensing device that determines range and direction to enable one autonomous vehicle to follow another.

Sensing array:
• PIC-C microcontroller
• Radio transmitter
• Radio receiver
• Sonar transmitters and receivers

Sonar and Radio Transmitters
• Sonar and radio transmitted together
• Controlled by an LMC 555 CMOS
Timer at 1.66 Hz
• Rolling code radio transmitter, hard
to electronically ‘crack’.

The Radio And Sonar Receivers
• The sonar receiver must transmit in order to receive.
• When the radio receiver gets a signal, it initializes the sonar and enables it to receive.
The Radio and Sonar Recievers
•The sonar receiver must transmit in order to receive
•When the radio receiver gets a signal, it initializes the sonar and enables it to receive.
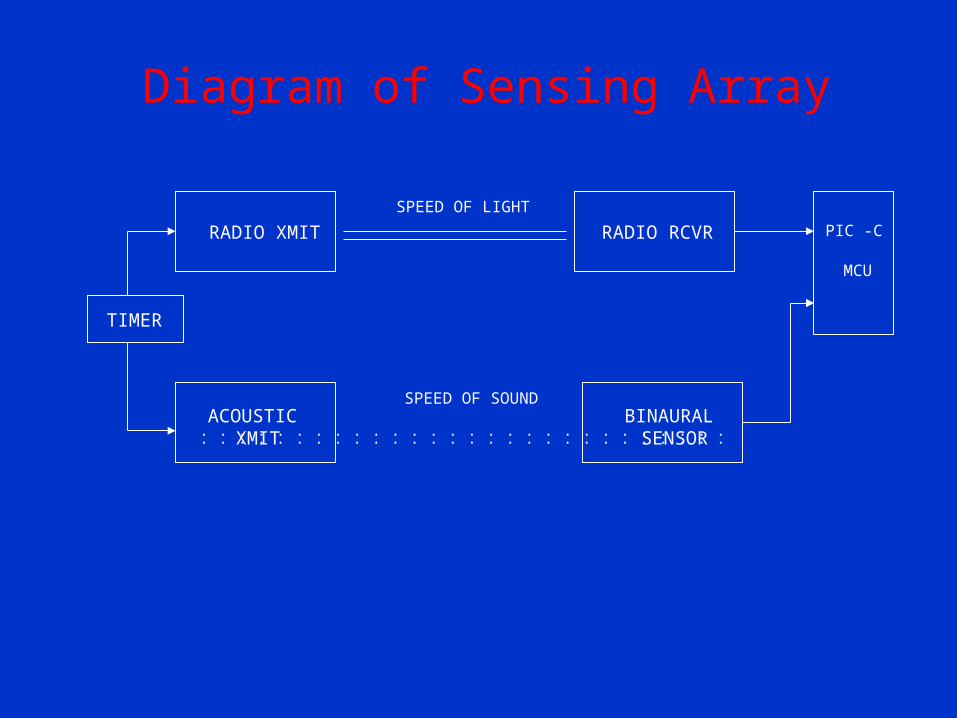
RADIO XMIT
ACOUSTIC XMIT
RADIO RCVR
BINAURAL SENSOR
TIMER
Diagram of Sensing Array
PIC -C
MCU
SPEED OF LIGHT
SPEED OF SOUND
. . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . .
How It Works:
• The radio receiver gets the electromagnetic part of the signal at the speed of light.
• The sonar receiver gets the acoustic part of the signal at the speed of sound.
• The difference between the electromagnetic and acoustic signals indicates range.
• The difference between each ‘ear’ of the binaural receivers indicates direction.

RADIO RCVR
LEFT ‘EAR’
RIGHT ‘EAR’
T = 0
Diagram of the Signals
TIMEtElapsed = 20 ms

Navigation
• To test this system, the receivers were mounted on an autonomous mobile robot and connected to a PIC-C microcontroller.
• The robot takes the difference in readings between each ear of the binaural sonar receivers in order to correct itself.
• The greater the difference, the more the robot ‘corrects.’
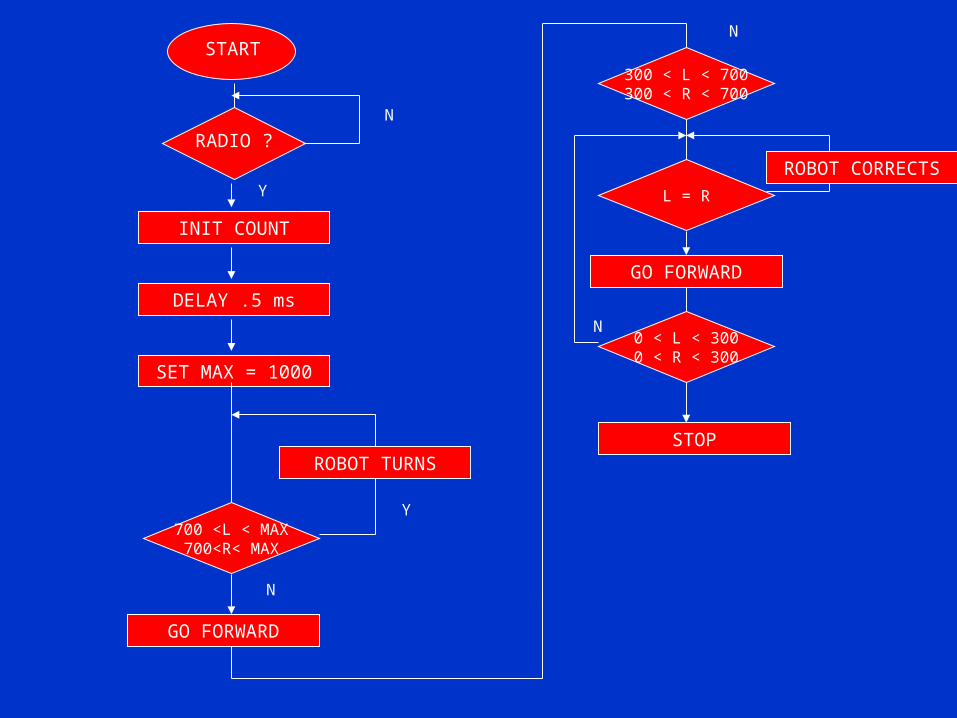
START
RADIO ?
INIT COUNT
DELAY .5 ms
SET MAX = 1000
Y
N
700 <L < MAX700<R< MAX
ROBOT TURNS
300 < L < 700300 < R < 700
L = R
0 < L < 3000 < R < 300
GO FORWARD
N
STOP
N
GO FORWARD
Y
N
ROBOT CORRECTS

Advantages and Disadvantages
• Is not affected by sunlight
• Has more range, less resolution than IR
• The 400 V excitation pulse that switches the sonar on and off can cause electrical noise in other circuits
• ‘Echoes’ from the receiver

Thanks to:
• Professor Roman Kuc
• Ed Jackson
• The Intelligent Ground Vehicle Team


















