Unmanned Undersea Vehicle (UUV) forUnmanned Undersea...
63
International Symposium on EXPO 2012 Yeosu Korea W ld O F 2010 World Ocean Forum 2010 Nov 15‐17, Busan, Korea Unmanned Undersea Vehicle (UUV) for Unmanned Undersea Vehicle (UUV) for Naval Science/Technology and Operations Peter C. Chu Naval Postgraduate School Monterey, California, USA pcchu@nps.edu
Transcript of Unmanned Undersea Vehicle (UUV) forUnmanned Undersea...

International Symposium onEXPO 2012 Yeosu KoreaW ld O F 2010World Ocean Forum 2010Nov 15‐17, Busan, Korea
Unmanned Undersea Vehicle (UUV) forUnmanned Undersea Vehicle (UUV) for Naval Science/Technology and Operations
Peter C. ChuNaval Postgraduate SchoolgMonterey, California, USA

Outline
• Why UUV? • Fundamentals of UUV• UUV Dynamics and Controly• Key Technology Issues• UUV an Effective Marine Remote Sensing• UUV – an Effective Marine Remote Sensing Technology F•Future …

Why UUV?
Mine Countermeasure (MCM) Antisubmarine Warfare (ASW)Antisubmarine Warfare (ASW)
as examples




U.S. vs. MINES•Of the 18 US Navy ships that have suffered battle damage in the last 50 years, 78 per cent was as a result of mines.

•Why defeat the mine/maritime IED?

Economy and Security

Today’s SolutionToday’s Solution

ASW Success Foundation
Figure of merit (FOM)
•ASW Success starts with
FOM SL LE RD•FOM = SL-LE-RD.

Underwater AcousticsUnderwater Acoustics
22 2
02( , ) ( , ) 2 ( ) ( , )( )
p r p r k r p rc zωω ω μ ω∇ + =
r r r r
( )
0
( )( ) c rrc
δμ =r
r •Stochastic or DeterministicPerturbation•

Urgent scientific problem
•What is the temporal-spatial variability in littoral environment (sediment soundlittoral environment (sediment, sound sped profiles, …)?
• UUV is the ltimate sol tion• UUV is the ultimate solution.

UUV Capabilities
• entering a hostile area and gathering as muchentering a hostile area and gathering as much information about the surroundings as possible
• quickly identifying safe paths as well asquickly identifying safe paths as well as identify mined areas
• gathering , transmitting, or acting on all typesgathering , transmitting, or acting on all types of information
•engaging bottom, volume, surface, air or landengaging bottom, volume, surface, air or land targets
•…………

Fundamentals of UUV

UUV
Hull Storage Sensor(fins) (battery) (sonar)(fins) (battery) (sonar)
Thrust Engine PayloadThrust Engine Payload(propulsion)
( )•(rocket)•

Background of UUV
•90% of International Trade in Sea Lane•Tactical Considerations•Secure Future Leading Edge Technology•Secure Future Leading Edge Technology•Boosting Industrial Impacts•Academic, Industrial and Military InterestsInterests

UUV Missions
•Intelligence surveillance and reconnaissanceIntelligence, surveillance, and reconnaissance•Mine countermeasures (MCM) A i b i f (AS )•Anti-submarine warfare (ASW)
•Inspection/identification•Communication/navigation network node•Amphibious warfareAmphibious warfare •Port and force defense S i l i•Special operations

Advantages of UUV
•AutonomyRi k R d ti•Risk Reduction
•Low ProfileD l bili•Deployability
•Environmental Adaptabilityi•Persistence
•Low Cost•Enable Missions that cannot be performed by manned systems

UUV Application
•Source: visiongain 2007

Navy Autonomous Undersea Vehicles (AUVs)
T li f BAE•Talisman from BAE
•21•Boeing’s LMRS
•Carrying variable payloads

Navy UUV Master Plan (2004)

A UUV System
Mission Planning
ControlSystem
Power System ModelPlanning System
UUV
Model
UUV UUV Dynamics
UUV Definitions
OceanOceanEnvironment

UUV Dynamics and Control

6 DOF Equation

V i bl i 6 DOF M d lVariables in 6-DOF Model

Th i d th lift (b ) i
Characteristics and Challenges in UUV Dynamics
•The ocean is dense; so the lift (buoyancy) is easy to achieve.
•High pressures in the ocean depths increase UUV complexity and cost.
•Drag, lift, and torque coefficients need to be determined.
•Oceanic motions affect UUV especially in shallow water regions since UUV moves slowshallow water regions since UUV moves slow (few knots).
•27

Particle Image Velocimetry (PIV)
(Ackermann and von Ellenrieder, OCEANS 2006)

( )2 0.2
2 2 Re iπα θ− − ⎛ ⎞
Diagnostic-Photographic Method
( )2 2 Re0.02 0.35 0.008 sinRe*dC e α θ⎛ ⎞= + + Ω⎜ ⎟
⎝ ⎠
( )0.2
1Re0.35sin if πθ α
⎧ ⎛ ⎞ ≤⎪ ⎜ ⎟⎪ ⎝ ⎠
1.8
12αθ π ⎛ ⎞= ⎜ ⎟( )
( ) ( )
1
20.85
2 2
Re* 2
Re0.1sin 0.015 sin if Re* 2
lCπθ θ α
⎪ ⎜ ⎟⎪ ⎝ ⎠= ⎨
⎛ ⎞⎪ − Ω >⎜ ⎟⎪ ⎝ ⎠⎩
1θ ππ⎜ ⎟
⎝ ⎠
0.72α⎛ ⎞⎝ ⎠⎩
( )0.2Re*0.07sin 2 if
Re 2πα α
⎧ ⎛ ⎞ ≤⎪ ⎜ ⎟⎝ ⎠⎪
⎨1
222 1αθ ππ
⎛ ⎞= −⎜ ⎟⎝ ⎠
( ) Re0.02sin 2 if Re* 2
mCπα α
⎝ ⎠⎪= ⎨⎛ ⎞⎪ >⎜ ⎟⎪ ⎝ ⎠⎩
( )( ) ( )1
2.2 2.22.2 2 sign 2θ π π π α π α≡ − − − −
(Chu et al. Journal of Applied Mechanics, 2010)

Mission Parallelization for a Group UUVs
integer linearinteger linear programming
(ILP)( )
i l ( )Giger et al. (2007)

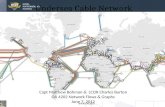
Multi-UUV Positioning/Communication
(Bourgeois & McDowell 2002)Acoustic everybody listening (Bourgeois & McDowell, 2002)Acoustic everybody listeningLaser 200 m distance

S l i th N i ti P bl
• Ret rn to a predetermined a point for a
Solving the Navigation Problem
• Return to a predetermined waypoint for a position fix
•Use Inertial Navigation System (INS) with GPS, Doppler Velocity Log (DVL)
•Use acoustic long-base-line (LBL), short-base-line (SBL) ultra-short-base-line (USBL)line (SBL), ultra short base line (USBL) prior installation of beacon array

Key Technologies of UUVKey Technologies of UUV
•System Autonomy•Energy and Endurances
•Network Communications•Materials, Platform and Structure
•Stealth Capability•Interoperatability

UUV Comparison Factors
•Power/endurancePower/endurance•Launch/recovery time
bili•Maneuverability•Coverage rate•Positioning•Communications (bandwidth)Communications (bandwidth)•Intelligence


UUV Energy Needs
Specific Energy (W/kg)
•Source: David Linden Handbook of Batteries (1995)Specific Energy (W/kg)

•Longer UUV missions as a
Air-independent Fuel Cells for UUVs (NUWC)
Longer UUV missions as a result of higher energy densityF t t d tiB tt C ll St k
Fuel and Oxidizer Storage
•Faster turn-around time between missions (less down time)
Battery Cell Stack
•Decreased cost and increased safety versus primary lithium batteries
Control & Buffer
B primary lithium batteries•Use of logistics fuels or even biodiesel
EMS Auxiliaries
Battery
•For 21” UUV, available volume / mass: 189 L / 209 kg

Docking System (from Allen et al., WHOI)
Launch and recovery

Casing Mounted Hangar (CMH) in Submarine(H d d B l 2008)(Hardy and Barlow 2008)
W t CMH ith UUV D l d•Wet CMH
•Wet CMH with UUV Deployed
•AUV Secured in Wet CMH •AUV Docking to Wet CMH

UUV Eff i M i RUUV – an Effective Marine Remote Sensing Technology
•to acquire high quality data of a prescribed area in reasonably fast timeprescribed area in reasonably fast time

(1) Glider Increasing the endurance: ( ) gPower is needed only in ascending (changing the volume), but not in
descending (gravity driven)descending (gravity driven).
(2) Needs surveillance for gliders

Glider Specs
• Slocum Glider SeaGlider Spray Glider• Webb Research APL/UW Scripps Institute
•Steering Active Rudder Roll / Bank Roll / Bank
•Depths 4 to 200 m (option: 1000) 30 to 1000 m 30 to 1500 m
•Horiz. Speed 0.5 knots 0.5 knots 0.5 knots
•Nominal– Endurance 30 days 6 months 6 months
• – Range 600 - 1500 km 4000 km 4500 km
•Power Alkaline Lithium Lithium
•Hull Dia. 21 cm 30 cm 20 cm
•Length 1.5 m 2.8 m (w/1-m antenna) 2.15 mg ( )
•Weight 123 lb 110 lb 114 lb
•Comms Iridium satellite phone Iridium satellite phone Iridium satellite phone

Glid k f tGliders - key features
•Speed ~ 0 3 ms-1•Speed ~ 0.3 ms•Endurance: up to 6 months GPS i ti t f•GPS navigation at surface
•2-way satellite communications (Iridium)•Measurements
–Conductivity, temperature and pressure–Current velocities–Vertical velocityT b l–Turbulence

Projected Glider Fleet Growth in the Naval Oceanographic Office

Barrier layer heat exchange with deep layerSST climate change
S
SST climate change
TS
Barrier Layer Salinity Stratification

(a)
30oN
31oN
de
Detection of Barrier Layer
28oN
29oN
Latit
ude
Florida
in the North Atlantic
near Florida coast82oW 81oW 80oW 79oW 78oW
28oN
Longitude
31W(b)
Glider−A
near Florida coast
using Seagliders
30.5N
Glider−AGlider−B
(Chu and Fan, 2010)
29.5N
30N
Latit
ude
Solid Curve Glider A
79W 78.5W 78W29N
29.5N
Longitude
Dashed Curve Glider B

Time-depth cross section of temperature and density (Glider A)

Glider Products – Sound Speed
S d d d f•Sound speed used for MCM shipboard sonar
•MCMs stop every fourMCMs stop every four hours to conduct a BSP cast
•Gliders measure same information, can be used by MCMs in immediateby MCMs in immediate vicinity

REMUS (50-100 watts)
•Oceanographic Sensors•Chemical Sensors•Acoustic Communications•Hull Inspection Camera Suites•Hull Inspection Camera Suites
•7.5”Diameter

SMAST T REMUS & It S S it•SMAST T-REMUS & Its Sensor Suite
•Goodman (2005)
Equipments Sensors Signal Sampling rate(Hz) Location
RMMS
thrust probe dv/ds, dw/ds, v, w 500 left nose cove(exterior)
FP07 thermistor dT/ds, T 500 left nose cove(exterior)RMMS
pressure transducer dP/ds, P 500 left nose cove(interior)
Accelerometer ax, ay, az 500 left nose cove(interior)
Seabird CTD T, S and D 16 right nose cove
Backscattering Meter Beta470 and Beta700 1 left noseBB2F
Backscattering Meter Beta470 and Beta700 1 left nose
Fluorometer Chl a 1 left nose
ADCP u,v 0.2 middle

• ADCP • CTD•Gradient Richardson Number
2 2N N
•T-REMUS AUV and Key variables:
•Mean velocity shear
•
usz
∂=∂
•Buoyancy frequency
•0
gNzρ
ρ∂
= −∂ ( )2 2
N NRisu z
= =∂ ∂
•Turbulent Velocity wturb
( )1/ 2/turbw Nε=
•Goodman (2010)
4/3
R Blρκε ⎛ ⎞⎜ ⎟
•Buoyancy Reynolds Number• ECO BB2F
Backscattering Meter and Fluorometer
•Goodman (2010)
• Shear Probe• Dissipation Rate b2
' ' = Re wdρρ εκ ν< > Γ
= = Γ
2Re Bb N l
ρ
ν
εν ν
= = = ⎜ ⎟Γ ⎝ ⎠•Eddy Diffusivity
Fluorometer •Chlorophyll a
• Dissipation Rate215 vν ( )
2i i
j j
u ux x x
ε ν ∂ ∂ ∂= < >= < >
∂ ∂ ∂
b2| |
.2
d Ndz
ρ ρ
Γ ≈

(6) Future …
•Systematic and Effective National Research and Development
•Core Technology Selection•Optimized and Effective UUV SystemOptimized and Effective UUV System Configurations
•Synergy Effects over National Unmanned•Synergy Effects over National Unmanned System Researches

Communication and Sensor Technology

Archerfish Mine Disposal System (UK Navy)
•mine-seeking expendable neutraliser
f i f•up to four times faster than conventional remotely-controlled mine disposal vehicles.p

Remote Minehunting System (RMS)
•55




The AN/WLD-1 RMS in Operation
•SOURCE: Image courtesy of the Lockheed Martin Corporation



Suggestion
Korean Version ofKorean Version of UUV Master Plan is needed.

Thank you very much for your attention !!
Q ?Questions?