University at Buffalo, State University of New York USAsrihari/CSE574/Chap4/4.4-Laplace.pdf ·...
25
The Laplace Approximation Sargur N. Srihari University at Buffalo, State University of New York USA
Transcript of University at Buffalo, State University of New York USAsrihari/CSE574/Chap4/4.4-Laplace.pdf ·...

The Laplace Approximation
Sargur N. Srihari University at Buffalo, State University of New York
USA

Topics in Linear Models for Classification • Overview 1. Discriminant Functions 2. Probabilistic Generative Models 3. Probabilistic Discriminative Models 4. The Laplace Approximation 5. Bayesian Logistic Regression
2
Machine Learning Srihari

Topics in Laplace Approximation
• Motivation • Finding a Gaussian approximation: 1-D case • Approximation in M-dimensional space • Weakness of Laplace approximation • Model Comparison using BIC
Machine Learning Srihari
3

What is Laplace Approximation? • The Laplace approximation framework aims to
find a Gaussian approximation to a continuous distribution
Machine Learning Srihari
4
Why study Laplace Approximation?
• We shall discuss Bayesian treatment of logistic regression – It is more complex than the Bayesian treatment of
linear regression – In particular we cannot integrate exactly
• In ML we need to predict a distribution of the output that may involve integration
Machine Learning Srihari
5

Bayesian Linear Regression • Recapitulate:
– in Bayesian linear regression we integrate exactly:
Machine Learning Srihari
6
p(t | t,α,β)= p(t|w,β) ⋅p(w|t,α,β)dw∫
p(t |x,w,β) = N(t |y(x,w),β−1) p(w|t)=N(w|mN,SN) mN=β SNΦTt
SN-1=α I+β ΦTΦ
p(t |x, t,α,β) = N(t |m
NTφ(x),σ
N2 (x)) where σ
N2 (x) =
1β
+φ(x)TSNφ(x)
y(x,mN)= k(x,x
n)tn
n=1
N
∑ k(x,x’)=βφ (x)TSNφ (x’) SN-1= S0
-1+ βΦTΦ ⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=Φ
−
−
)x()x(
)x()x(...)x()x(
10
20
111110
NMN
M
φφ
φφφφ
Equivalent Kernel
Gaussian posterior: Gaussian noise:
Predictive Distribution::
Result of integration:
p(w)=N (w|m0 ,S0) S0=α-1I
Gaussian prior:

Bayesian Logistic Regression
• In Bayesian treatment of Logistic regression – we cannot directly integrate over the parameter
vector w since the posterior is not Gaussian • It is therefore necessary to introduce some form
of approximation • Later we will consider analytical approximations
and numerical sampling
Machine Learning Srihari
7

Approximation due to intractability • Bayesian logistic regression
– Prediction p(Ck|x) involves integrating over w
– Convolution of Sigmoid-Gaussian is intractable • It is not Gaussian-Gaussian as in linear regression
• Need to introduce methods of approximation • Approaches
– Analytical Approximations • Laplace Approximation
– Numerical Sampling 8
Machine Learning Srihari
p(C1 |φ, t) ! σ (wTφ)p(w)dw∫

Laplace approximation framework
• Simple but widely used framework • Aims to find a Gaussian approximation to a
probability density defined over a set of continuous variables
• Method aims specifically at problems in which the distribution is unimodal
• Consider first the case of single continuous variable
Machine Learning Srihari
9
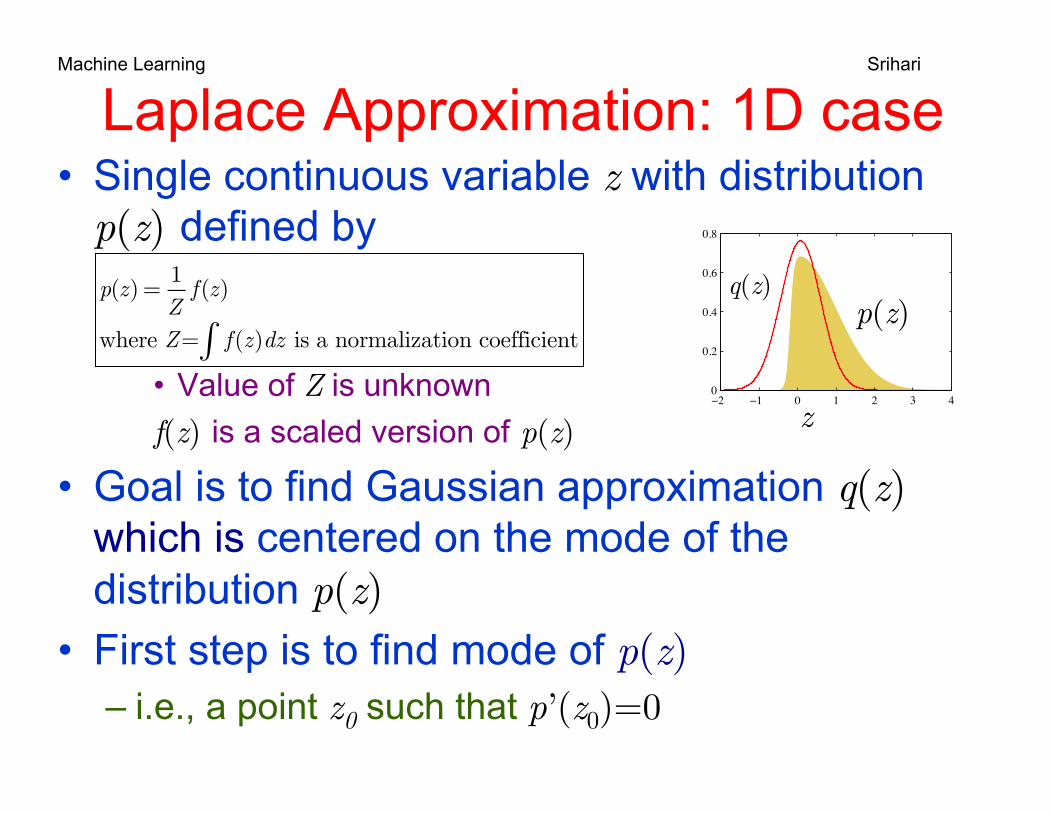
Laplace Approximation: 1D case • Single continuous variable z with distribution
p(z) defined by
• Value of Z is unknown f(z) is a scaled version of p(z)
• Goal is to find Gaussian approximation q(z) which is centered on the mode of the distribution p(z)
• First step is to find mode of p(z) – i.e., a point z0 such that p’(z0)=0
p(z) =1Z
f (z)
where Z= f (z)dz ∫ is a normalization coefficient
!2 !1 0 1 2 3 40
0.2
0.4
0.6
0.8
Machine Learning Srihari
q(z) p(z)
z

Quadratic using Taylor’s series • A Taylor’s series expansion of f (x) centered
on the mode x0 has the power series
– f (x) is assumed infinitely differentiable at x0 – Note that when x0 is the maximum f’(x0)=0 and
that term disappears • A Gaussian f (x) has the property that lnf (x)
is a quadratic function of x – We will use a Taylor’s series approximation of the
function ln f (z) and use only the quadratic term
Machine Learning Srihari
11
f (x) = f (x
0)+
f '(x0)
1!x −x
0( )+f ''(x
0)
2!x −x
0( )2+
f (3)(x0)
3!x −x
0( )3+ ...
Animation

Finding mode of a distribution • Find point z0 such that p’(z0)=0,
– Or equivalently
• Approximate f (z) using 2nd derivative p’’(z0) – Logarithm of Gaussian is a quadratic. – Use Taylor expansion of ln f (z)centered at mode z0
df (z)dz
z=z0
= 0
€
ln f (z) ≈ ln f (z0) − 12A(z − z0)2
where A = −d2
dz2 ln f (z)z= z0
First order term does not appear since z0 is a local maximum and f ’(z0)=0
Machine Learning Srihari
A is the second derivative of logarithm of scaled p(z)
!2 !1 0 1 2 3 40
0.2
0.4
0.6
0.8
q(z) p(z)
z

Final form of Laplacian (one dim)
• Taking exponential
• To Normalize f (z) we need Z
• The normalized version of f(z) is q(z) = 1
Zf (z) = A
2π!
"#
$
%&1/2
exp −A2(z− z0 )
2()*
+,-~ N(z | z0,A
−1)
€
f (z) ≈ f (z0)exp −A2(z − z0)
2$ % &
' ( )
Machine Learning Srihari
• Approximation of f(z):
Z = f(z)dz∫ ≈ f(z0) exp -
A2
(z - z0)2⎧
⎨⎩
⎫⎬⎭∫ dz = f(z0)
(2π)1/2
A1/2
Assuming ln f(z) to be quadratic
€
ln f (z) ≈ ln f (z0) − 12A(z − z0)2
where A = −d2
dz2 ln f (z)z= z0

Laplace Approximation Example
!2 !1 0 1 2 3 40
0.2
0.4
0.6
0.8
14
!2 !1 0 1 2 3 40
10
20
30
40
p(z)
Mode of p(z)
Laplace Approx (Gaussian)
Negative Logarithms
Machine Learning Srihari
Gaussian approximation will only be well-defined if its precision A>0, or second derivative of f (z) at point z0 is negative
Applied to distribution where is sigmoid
p(z)α exp(−z2 / 2)σ (20z + 4)
σ
f (z) = exp(−z 3 / 2)σ(20z + 4)
Z = f (z)dz∫

Laplace’s Method • Approximate integrals of the form
– Assume f(x) has global maximum at x0• Then f(x0) >> other values of f(x)
– with eMf(x) growing exponentially with M
• So enough to focus on f(x) at x0
• As M increases, integral is well-approximated by a Gaussian
• Second derivative appears in denominator • Proof involves Taylor’s series expansion of
f(x) at x0
Machine Learning Srihari
15
eMf (x )a
b
∫ dx
M=0.5
M=3

Laplace Approx: M-dimensions • Task: approximate p(z)=f(z)/Z defined over
M-dim space z • At stationary point z0 the gradient vanishes • Expanding around this point
– where A is the M x M Hessian matrix
• Taking exponentials
Machine Learning Srihari
16
∇f (z )
ln f (z) ln f (z0 ) −
12(z − z0 )
T A(z − z0 )
A = −∇∇ ln f (z) |z=z0
f (z) f (z0 )exp −
12(z − z0 )
T A(z − z0 )"#$
%&'

Normalized Multivariate Laplacian
17
Z = f (z)dz∫
≈ f (z0 ) exp - 12
(z − z0 )T A(z − z0 )$%&
'()∫ dz
= f (z0 ) (2π )M /2
| A |1/2
Machine Learning Srihari
q(z) = 1Zf (z) =
A 1/2
(2π )M /2 exp −12
(z − z0 )T A(z − z0 )#$%
&'(
=N(z|z0,A-1)
• Distribution q(z) is proportional to f(z) as

Steps in Applying Laplace Approx.
1. Find the mode z0
– Run a numerical optimization algorithm 2. Evaluate Hessian matrix A at that mode
• Many distributions encountered in practice are multimodal – There will be different approximations according to
which mode considered – Z of the true distribution need not be known to apply
Laplace method
Machine Learning Srihari
18

Weakness of Laplace Approx.
• Directly applicable only to real variables – Based on Gaussian distribution
• May be applicable to transformed variable – If 0≤τ<∞ then consider Laplace approx of ln τ
• Based purely on a specific value of the variable • Variational methods have a more global
perspective
Machine Learning Srihari
19

Approximating Z
20
Machine Learning Srihari
• As well as approximating the distribution p(z) we can also obtain an approximation to the normalizing constant Z
• Can use this result to obtain an approximation
to model evidence that plays a central role in Bayesian model comparison
Z = f (z)dz∫ ! f (z0 ) exp − 1
2(z − z0 )T A(z − z0 )⎧
⎨⎩
⎫⎬⎭∫ dz
=f (z0 ) (2π )M /2
| A |1/2

Model Comparison and BIC
21
Machine Learning Srihari
• Consider data set D and models {Mi} having
parameters {θi} • For each model define likelihood p(D|θi,Mi) • Introduce prior p(θi|Mi) over parameters • Need model evidence p(D|Mi) for various
models

Model Comparison and BIC
22
p(D) = p(D |θ)p(θ)dθ∫
For a given model from sum rule
Machine Learning Srihari
ln p(D)=ln f (θ)dθ∫
=ln f (θmap ) (2π )M /2
| A |1/2
$
%&
'
()
= lnp(D|θmap ) + ln p(θmap ) + M2
ln2π − 12
ln | A |
Identifying f(θ)=p(D|θ)p(θ) and Z=p(D) and using Z = f (z0 )(2π )M /2
| A |1/2
where θmap is the value of θ at the mode of the posterior A is Hessian of second derivatives of negative log posterior
Occam factor that penalizes model complexity

Bayes Information Criterion (BIC)
• N is the number of data points • M is the no of parameters in θ • Compared to AIC given by ln p(D|wML)-M BIC penalizes model complexity more heavily
Machine Learning Srihari
23
lnp(D) ≈ lnp(D|θmap) -
12M lnN
Assuming broad Gaussian prior over parameters & Hessian is of full rank, approximate model evidence is

Weakness of AIC, BIC
• AIC and BIC are easy to evaluate • But can give misleading results since
– Hessian matrix may not have full rank since many parameters not well-determined
• Can obtain more accurate estimate from
• Used in the context of neural networks
Machine Learning Srihari
24
ln p(D)= lnp(D|θmap ) + ln p(θmap ) + M2
ln2π − 12
ln | A |

Summary • Bayesian approach for logistic regression is
more complex than for linear regression – Since posterior over w is not Gaussian
• Predictive Distribution needs an integral over parameters – Simplified when Gaussian
• Laplace approximation fits the best Gaussian – Defined for both univariate and multivariate
• Normalization term is useful as BIC criterion • AIC and BIC are simple but not accurate
Machine Learning Srihari
25