Universitas Surabaya (Ubaya)repository.ubaya.ac.id/34274/7/Rudy Agustriyanto_Perbandingan Kin… ·...
13
Transcript of Universitas Surabaya (Ubaya)repository.ubaya.ac.id/34274/7/Rudy Agustriyanto_Perbandingan Kin… ·...




DOI: 10.22146/jrekpros.38211 Copyright © 2018 THE AUTHOR(S). This article is distributed under a Creartive Commons Distribution-ShareAlike 4.0 International license.
e-ISSN 2549-1490 p-ISSN 1978-287X
JURNAL REKAYASA PROSES Research article / Vol. 12, No. 2, 2018, hlm. 10-18
Journal homepage: http://journal.ugm.ac.id/jrekpros
Perbandingan Kinerja Penyetelan Hagglund-Astorm dan Tyreus-
Luyben pada Sistem Kendali Pendinginan Susu
Rudy Agustriyanto*, Anastasia Febriyanto dan Putu Sri Widiawati
Jurusan Teknik Kimia, Fakultas Teknik, Universitas Surabaya
Jl. Raya Kali Rungkut No.56, Rungkut, Surabaya 60293
*Alamat korespondensi: [email protected]
(Submisi: 20 Agustus 2018; Revisi: 28 September 2018; Penerimaan: 30 September 2018)
A B S T R A C T
Milk cooling process is one of the most important milk processing steps after milk extraction
process. Milk cooling process is carried out to inhibit the microbial growth. The milk is cooled from
room temperature to 4 °C. Generally, this process is performed in batch installation. In this research,
continuous milk cooling would be simulated. First, the model of the system was derived from the mass
and heat balance. The simulation results were then identified using the System Identification Toolbox
(SIT) on Matlab. System Identification Toolbox was used to build the mathematical models of dynamic
system based on measured input and output data. The result of system identification is useful for
setting control and stability analysis. The milk cooling system was then controlled by Proportional
Integral (PI) Control. There are two kinds of tuning methods that will be analyzed. These are
Hagglund-Astorm method and Tyreus-Luyben. The results showed that the control performance tuned
using the Tyreus-Luyben method was better than the Hagglund-Astorm method from the criteria of its
SSE (sum squared of error).
Keywords: control; proportional integral; system identification; tuning.
A B S T R A K
Proses pengolahan susu yang sangat penting setelah pemerahan adalah proses pendinginan. Proses
pendinginan susu digunakan untuk menghambat perkembangbiakan mikrobia. Susu didinginkan dari
suhu kamar sampai 4 °C. Umumnya proses ini dilakukan secara batch pada instalasi di koperasi susu.
Dalam penelitian ini, disimulasikan sistem pengendalian suhu susu secara kontinu. Model sistem
diperoleh dari penurunan neraca massa dan panas. Hasil simulasi kemudian diidentifikasi dengan
menggunakan System Identification Toolbox pada Matlab. System Identification Toolbox digunakan
untuk menyusun model matematis dari sistem dinamis berdasarkan data input dan output yang diukur.
Hasil identifikasi sistem berguna untuk penyetelan pengendali maupun analisis kestabilan. Sistem
pendinginan susu kemudian dikendalikan dengan Proportional Intergral (PI) Control. Metode
penyetelan yang dianalisis ada dua macam yaitu metode Hagglund-Astorm dan metode Tyreus-
Luyben. Hasil yang diperoleh menunjukkan bahwa kinerja pengendali yang disetel menggunakan
metode Tyreus-Luyben lebih baik dibandingkan dengan metode Hagglund-Astorm dilihat dari kriteria
SSE nya.
Kata kunci: identifikasi sistem; pengendalian; proportional integral; tuning

Jurnal Rekayasa Proses, Vol. 12, No. 2, 2018, hlm. 10-18
11
1. Pendahuluan
Susu merupakan sumber nutrisi yang baik
bagi manusia. Namun di lain pihak, susu
merupakan media yang baik bagi pertumbuhan
mikroorganisme, terutama bakteri patogen seperti
Staphylococcus aureus, Escherichia coli, dan
Salmonella sp (Suwito, 2009). Mikroorganisme
pada susu mentah dapat berkembang jika
disimpan pada suhu tertentu. Mikroorganisme ini
akan berbahaya bila dikonsumsi, sehingga susu
mentah yang telah diperah harus segera disimpan
pada suhu tertentu. Hal ini bertujuan untuk
menghambat pertumbuhan mikroorganisme yang
dapat menurunkan kualitas susu segar
(Ruangwittayanusorn dkk. 2016).
Susu merupakan salah satu bahan pangan
yang sangat cepat mengalami penurunan mutu
gizi dan mutu sensori apabila tidak mendapat
penanganan yang tepat. Penanganan
penyimpanan susu setelah diperah dapat
dilakukan dengan cara menyimpan pada kondisi
suhu rendah yaitu 4 °C. Proses penyimpanan susu
pada kondisi suhu rendah dikenal dengan istilah
proses pendinginan susu. Pada umumnya, proses
pendinginan susu di industri adalah
menggunakan air sebagai media pendingin
(Murphy dkk., 2012). Media pendingin ini perlu
dipasang pengendali untuk memastikan suhu
susu yang keluar 4 °C (Toledo dkk., 2015).
Saat ini, kebutuhan akan produk susu
semakin meningkat sehingga industri pengolahan
susu segar harus meningkatkan kapasitas
produksi sesuai permintaan konsumen. Proses
pendinginan secara batch sebaiknya tidak lagi
digunakan karena kapasitas susu yang dapat
didinginkan kurang besar. Oleh karena itu proses
pendinginan susu dapat beralih ke sistem kontinu
karena kapasitas susu yang didinginkan dapat
lebih banyak. Tentu saja hal ini harus diimbangi
dengan peningkatan populasi sapi perah di daerah
tersebut.
Tujuan dari penelitian ini adalah membuat
simulasi atau simulator sistem pendinginan susu,
mengidentifikasi sistem pendinginan susu, dan
membandingkan kinerja penyetelan pengendali
menggunakan metode Tyreus-Luyben dan
Hagglund-Astorm.
2. Metode Penelitian
Berikut adalah prosedur yang dilakukan untuk
menjalankan penelitian ini:
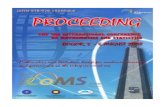
1. Penentuan sistem yang ditinjau
Sistem yang ditinjau adalah tangki susu yang
beroperasi secara kontinu. Tangki susu
tersusun atas dua bagian yaitu tangki
penampungan susu dan tangki air pendingin
seperti tampak pada Gambar 1.
Gambar 1. Skema tangki pendinginan sistem
kontinu pada KUD SAE Pujon
2. Penyusunan model matematis
Diasumsikan bahwa volume susu atau massa
susu di dalam tangki adalah konstan sehingga
neraca massa dapat diabaikan. Model akan
diperoleh dari penurunan neraca energi.
Neraca energi unsteady state disajikan dalam
Persamaan (1).
AccOutIn
AccoutQinQ
dt
odTpCmQoTiTpCw (1)
Linearisasi W.Ti dan W.To :
ssi,si,issi,si wwTTTwTwTw (2)
swwso,Tso,ToTswso,TswoTw (3)
Tanda s, berarti pada saat steady state.
Persamaan (2) dan (3) ke (1), menjadi:
dt
odTpCmQpCoTiTswswwso,Tsi,T (4)
Neraca energi steady state dinyatakan dalam
Persamaan (5).
0sQso,Tsi,TpCsw (5)

Jurnal Rekayasa Proses, Vol. 12, No. 2, 2018, hlm. 10-18
12
Substitusi Persamaan (4) dengan Persamaan (5) menghasilkan Persamaan (6).
dt
odTpCm)sQ(QpCso,ToTsi,TiTswswwso,Tsi,T (6)
Transformasi Laplace pada Persamaan (6) menghasilkan Persamaan (7).
0oTsoTspCmsQpCsoTsiTswsWso,Tsi,T (7)
maka dengan To(0) = 0, Persamaan (7) dapat dijabarkan lebih lanjut sebagai berikut::
soTspCmsQpCsoTsiTswsWso,Tsi,T (8)
soTpCswsoTspCmsQsiTpCswsWpCso,Tsi,T (9)
soTpCswspCmsQsiTpCswsWpCso,Tsi,T (10)
pCswspCm
sQsiTpCswsWpCso,Tsi,TsoT
(11)
1s
sw
m
sw
sWsi,Tso,T
1s
sw
m
pCsw
sQ
1s
sw
m
siTsoT
(12)
(s)sW
1sτ
2KQ(s)
1sτ
1K(s)iT
1sτ
1(s)oT
dengan:
Csw
1
1K
sw
si,Tso,T
2
K
sw
m
maka:
sW
1s
sw
m
2KsQ
1s
sw
m
1KsiT
1s
sw
m
1soT
(13)
Keterangan :
Ws = Laju alir susu masuk (kg/menit)
To,s = Suhu susu masuk saat steady state (oC)
Ti,s = Suhu susu keluar saat steady state (oC)
m = Massa susu masuk (kg)

Jurnal Rekayasa Proses, Vol. 12, No. 2, 2018, hlm. 10-18
13
3. Simulasi proses dengan menggunakan
Simulink.
4. Analisis hasil menggunakan System
Identification Toolbox (SIT).
5. Simulasi sistem lintas tertutup.
6. Penyetelan parameter pengendali.
Sistem ini menggunakan pengendali
Proportional-Integral (PI). Persamaan kontrol PI
dalam bentuk Laplace (Sheng Pai dkk., 2009) :
1( ) 1
i
G s Kccs
(14)
Untuk memperoleh nilai Kc (gain pengendali)
dan i (integral time pada pengendali) digunakan
metode Tyreus-Luyben dan Hagglund-Astorm.
Metode Tyreus-Luyben
Penentuan harga parameter PI pada metode ini
digunakan persamaan seperti ditunjukkan pada
Tabel 1 (Sharokhi, 2008).
Tabel 1. Rumus pengendali PI untuk metode Tyreus-
Luyben
Metode Jenis Pengendali (PI)
Kc i
Tyreus-
Luyben Ku/3,2 2,2Pu
dengan Ku = ultimate gain
Pu = ultimate period
Metode Hagglund-Astorm
Penentuan nilai parameter PI pada metode ini
digunakan persamaan seperti ditunjukkan pada
Tabel 2 (Haugen, 2010).
Tabel 2. Rumus pengendali PI untuk metode Hagglund-
Astorm
Metode Jenis Pengendali (PI)
Kc i
Hagglund-
Astorm
1. 0,14 0, 28
T
K
6,8.
. 0,3310.
T
T
Pada metode ini, nilai Kc dan I adalah fungsi
K (gain proses), T (konstanta waktu dari proses)
dan (waktu tunda dari proses). Pada kedua
metode tuning ini, divariasi time delay dari 1
sampai 5 menit. Pada proses orde satu tanpa time
delay terdapat kesulitan dalam menentukan
ultimate gain (Ku) dan ultimate period (Pu).
Sedangkan ditunjukkan pada Tabel 1, parameter
pengendali ditentukan sebagai fungsi Ku dan Pu.
Diagram Bode pada proses orde 1 tanpa time
delay tidak akan pernah menemukan frekuensi
cross over sebab sudut fasanya tidak pernah
mencapai -180˚.
Sedangkan pada metode Hagglund-Astorm,
cukup jelas ditunjukkan pada Tabel 2 bahwa
parameter pengendali adalah fungsi konstanta-
konstanta untuk proses orde 1 dengan time delay.
Hal ini hampir sama dengan metode Cohen Coon
yang mempersyaratkan identifikasi proses
sebagai proses orde 1 dengan time delay
(Coughanowr, 2009).
Untuk mendapatkan ultimate gain (Ku) dan
ultimate period (Pu), pertama-tama dibuat
diagram Bode untuk sistem lintas terbuka tanpa
pengendali. Pada diagram Bode, frekuensi cross
over (ωco) ditentukan yaitu pada saat sudut fasa
mencapai -180˚. Pada saat frekuensi cross over,
harga rasio amplitudo dapat ditentukan, yaitu A,
sehingga harga ultimate gain (Ku) dan ultimate
period (Pu) adalah dinyatakan dalam Persamaan
(15) dan Persamaan (16) (Coughanowr, 2009):
1K
u A (15)
2Pu
co
(16)
3. Hasil dan Pembahasan
Penurunan model matematis seperti
ditunjukkan pada Persamaan 17.
1 1 2( ) ( ) ( ) ( )
1 1 1
K KT s T s Q s W so si
s s s
(17)
Pada Persamaan (17), Q adalah manipulated
variable sedangkan Ti dan Ws adalah gangguan
(disturbance). Tabel 3 menunjukkan parameter
pada kondisi steady state yang digunakan dalam
persamaan model matematis.

Jurnal Rekayasa Proses, Vol. 12, No. 2, 2018, hlm. 10-18
14
Tabel 3. Parameter saat kondisi steady state
Parameter Harga Satuan
Ws 85,6 kg/menit
M 2567,5 kg
To,s 4 oC
Ti,s 36 oC
Dengan demikian, diperoleh Persamaan (18).
1 0, 002973 0,37390( ) ( ) ( ) ( )
30 1 30 1 30 1T s T s Q s W so si
s s s
(18)
Model matematis pada Persamaan 18
disimulasi untuk memperoleh hasil input dan
output. Hasil input dan output kemudian
diidentifikasi menggunakan System Identification
Toolbox (SIT) (Ramdani, 2015) untuk
mengetahui kesesuaian model matematis dari
penurunan neraca massa dan panas dengan model
yang dihasilkan dari SIT. Terdapat 2
perbandingan hasil SIT dengan menggunakan
gangguan berupa fungsi transfer orde satu dan
sinusoidal. Pertama adalah perbandingan model
matematis antara penurunan dengan SIT
menggunakan gangguan berupa step disertai
dengan fungsi transfer orde 1.
Tabel 4. Perbandingan model matematis hasil
penurunan dengan System Identification
Toolbox (gangguan step disertai fungsi transfer
orde 1)
Metode Fungsi Transfer
To(s)/Ti(s) To(s)/W(s) To(s)/Q(s)
Penurunan
model matematis
1
30 1s
0, 37390
30 1s
-0, 002973
30 1s
SIT
0,978
29, 011 1s
0,36207
28, 742 1s
-0, 002868
28,524 1s
Hasil simulasi dari model matematis hasil
penurunan dan SIT dengan gangguan berupa
fungsi transfer orde 1, naik-turun-naik dengan
time constant sebesar 5 , 10 dan 7,5 menit pada
menit ke-10, 60 dan 110 dapat dilihat pada
Gambar 2 dan Gambar 3.
Sedangkan Gambar 4 menunjukkan hasil
simulasi dari model matematis hasil penurunan
dan SIT dengan gangguan berupa fungsi transfer
orde 1, turun-naik-turun dengan time constant
sebesar 12, 6 dan 10 menit pada menit ke-10, 60
dan 110.
Gambar 2. Perbandingan antara hasil output dari
penurunan model matematis dan SIT
dengan gangguan Ti (gangguan berupa
fungsi transfer orde 1)
Gambar 3. Perbandingan antara hasil output dari
penurunan model matematis dan SIT
dengan gangguan W (gangguan berupa
fungsi transfer orde 1)
Gambar 4. Perbandingan antara hasil output dari
penurunan model matematis dan SIT
dengan gangguan Q (gangguan berupa
fungsi transfer orde 1)
0 20 40 60 80 100 120
8
8.2
8.4
8.6x 10
4
Q (
kJ/m
en
it)
0 20 40 60 80 100 1200
2
4
6
8
10
12
waktu (menit)
To
(d
eg
C)
SIT
Penurunan

Jurnal Rekayasa Proses, Vol. 12, No. 2, 2018, hlm. 10-18
15
Tabel 5. Perbandingan Penurunan Model Matematis
dengan Hasil System Identification Toolbox
(gangguan sinusoidal
Metode Fungsi Transfer
To(s)/Ti(s) To(s)/W(s) To(s)/Q(s)
Penurunan
model
matematis 1s30
1
1s30
0,37390
1s30
-0,002973
SIT 1s27,205
0,92152
1s27,205
0,34456
1s27.205
-0,0027397
Selanjutnya model matematis divalidasi
dengan menggunakan dinamik data set yang
berbeda yaitu dengan menggunakan gangguan
berupa data input sinusoidal. Hasil simulasi dari
model matematis hasil penurunan dan SIT
dengan gangguan berupa fungsi sinusoidal
terdapat pada Gambar 5 hingga Gambar 7.
Gambar 5. Perbandingan antara hasil output dari
penurunan model matematis dan SIT
dengan gangguan Ti (gangguan sinusoidal)
Dari tabel serta grafik perbandingan antara
hasil output dari penurunan model matematis dan
SIT di atas, baik dengan gangguan berupa fungsi
step disertai dengan fungsi transfer orde 1
maupun sinusoidal, ditunjukkan bahwa hasil
penurunan model matematis mendekati dengan
hasil dari SIT. Hal ini disebabkan oleh besarnya
incremental data yang digunakan, yaiitu sebesar
1 menit. Hasil yang lebih teliti akan diperoleh
bila incremental data yang dipilih dan dianalisa,
dibuat lebih kecil lagi. Model matematis hasil
SIT dengan gangguan berupa fungsi step disertai
dengan fungsi transfer orde 1, selanjutnya
digunakan untuk penyetelan pengendali karena
hasilnya yang paling mendekati hasil penurunan.
Sebelum dilakukan penyetelan pengendali, sistem
ini dirancang menjadi sistem lintas tertutup (close
loop).
Gambar 6. Perbandingan antara hasil output dari
penurunan model matematis dan SIT
dengan gangguan W (gangguan sinusoidal)
Gambar 7. Perbandingan antara hasil output dari
penurunan model matematis dan SIT
dengan gangguan Q (gangguan sinusoidal)
Jenis pengendali yang digunakan adalah
Proportional-Integral (PI). Untuk mencari nilai
parameter PI yaitu Kc dan i adalah dengan
menggunakan metode Tyreus-Luyben dan
Hagglund-Astorm. Untuk kedua metode ini
dibutuhkan asumsi time delay (θ) (Agustriyanto,
2018). Variasi time delay yang digunakan adalah
1 sampai 5 menit. Variasi time delay ini
digunakan untuk mengetahui time delay mana
yang menghasilkan error antara set point
terhadap output yang terkecil untuk sistem ini.
0 20 40 60 80 100 120
35
35.5
36
36.5
37
Ti (d
eg
C)
0 20 40 60 80 100 1203.7
3.8
3.9
4
4.1
4.2
4.3
4.4
4.5
Waktu (menit)
To
(d
eg
C)
SIT
Penurunan
0 20 40 60 80 100 12080
85
90
95
W (
kg
/me
nit)
0 20 40 60 80 100 1203.4
3.6
3.8
4
4.2
4.4
4.6
4.8
5
Waktu (menit)
To
(d
eg
C)
SIT
Penurunan
0 20 40 60 80 100 1208.3
8.32
8.34
8.36
8.38x 10
4
Q (
kJ/m
en
it)
0 20 40 60 80 100 1203.5
3.6
3.7
3.8
3.9
4
4.1
4.2
4.3
Waktu (menit)
To
(d
eg
C)
SIT
Penurunan

Jurnal Rekayasa Proses, Vol. 12, No. 2, 2018, hlm. 10-18
16
0 20 40 60 80 100 1200
2
4
6
Tsusu k
elu
ar
(deg C
)
0 20 40 60 80 100 12035
36
37
Tsusu m
asuk (
deg C
)
0 20 40 60 80 100 12084
85
86
87
Wsusu m
asuk (
kg/m
nt)
0 20 40 60 80 100 120600
800
1000
1200
Q (
kJ/m
nt)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1200
2
4
6
Tsusu k
elu
ar
(deg C
)
0 20 40 60 80 100 12035
36
37
Tsusu m
asuk (
deg C
)
0 20 40 60 80 100 12084
85
86
87
Wsusu m
asuk (
kg/m
nt)
0 20 40 60 80 100 120600
800
1000
1200
Q (
kJ/m
nt)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1200
2
4
6
Tsusu k
elu
ar
(deg C
)
0 20 40 60 80 100 12035
36
37
Tsusu m
asuk (
deg C
)
0 20 40 60 80 100 12084
85
86
87
Wsusu m
asuk (
kg/m
nt)
0 20 40 60 80 100 120600
800
1000
1200
Q (
kJ/m
nt)
waktu (menit)
Set Point
Output
Persamaan 19 dan Gambar 8 adalah bentuk
fungsi transfer dengan asumsi time delay:
( ) 1
( ) 1
KT s soe
Q s s
(19)
Gambar 8. Diagram simulasi sistem pendinginan susu
kontinu
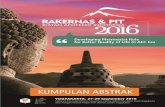
Penyetelan menggunakan metode Tyreus-
Luyben
Pada metode ini, untuk menghitung nilai Kc
dan i digunakan diagram Bode. Persamaan 20
dan Gambar 9 adalah contoh perhitungan
dengan asumsi θ = 1:
( ) 0, 002868 1
( ) 28,524 1
T s soe
Q s s
(20)
Gambar 9. Diagram Bode
Diagram Bode menunjukkan nilai frekuensi
cross-over sebesar 3,283 rad/time dan magnitude
(abs) sebesar 3,061x10-5 abs. Dari nilai tersebut,
nilai ultimate gain (Ku) dan ultimate period (Pu)
dapat ditentukan.
Ku = 32669,0624
Pu = 1,9129
Harga parameter pengendali ditunjukkan
pada Tabel 6 dengan berbagai asumsi time delay
yang dihitung sesuai dengan rumus pada Tabel 1.
Tabel 6. Harga parameter pengendali Tyreus-Luyben
Time delay Kc i
1 -10209,0820 4,2083
2 -6200,3968 6,9253
3 -4893,5171 8,7776
4 -3674,3092 11,6887
5 -2953,6862 14,5508
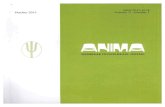
Berikut adalah profil set point dan output dengan
berbagai asumsi time delay:
Gambar 10. Profil output dan set point dengan asumsi
time delay = 1 menggunakan metode Tyreus-
Luyben
Gambar 11. Profil output dan set point dengan asumsi
time delay = 2 menggunakan metode Tyreus-
Luyben
Gambar 12. Profil output dan set point dengan asumsi
time delay = 3 menggunakan metode Tyreus-
Luyben
Dengan adanya time delay maka waktu proses
akan tertunda. Berdasarkan Gambar 10-14 dapat
dilihat bahwa semakin besar asumsi time delay
maka profil output akan semakin menjauhi set
point.
10-3
10-2
10-1
100
101
10-5
10-4
10-3
10-2
Ma
gn
itu
de
(a
bs)
10-3
10-2
10-1
100
101
-500
-400
-300
-200
-100
0
100
200
ph
ase
(de
q)
frequency(rad/time)
0 20 40 60 80 100 1201.5
2
2.5
3
3.5
4
4.5
To
(d
eg
C)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1201.5
2
2.5
3
3.5
4
4.5
To
(d
eg
C)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1201.5
2
2.5
3
3.5
4
4.5
To
(d
eg
C)
waktu (menit)
Set Point
Output

Jurnal Rekayasa Proses, Vol. 12, No. 2, 2018, hlm. 10-18
17
0 20 40 60 80 100 1200
2
4
6
Tsusu k
elu
ar
(deg C
)
0 20 40 60 80 100 12035
36
37
Tsusu m
asuk (
deg C
)
0 20 40 60 80 100 12084
85
86
87
Wsusu m
asuk (
kg/m
nt)
0 20 40 60 80 100 120600
800
1000
1200
Q (
kJ/m
nt)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1200
2
4
6
Tsusu k
elu
ar
(deg C
)
0 20 40 60 80 100 12035
36
37
Tsusu m
asuk (
deg C
)
0 20 40 60 80 100 12084
85
86
87
Wsusu m
asuk (
kg/m
nt)
0 20 40 60 80 100 120600
800
1000
1200
Q (
kJ/m
nt)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1200
2
4
6
Tsusu k
elu
ar
(deg C
)
0 20 40 60 80 100 12035
36
37
Tsusu m
asuk (
deg C
)
0 20 40 60 80 100 12084
85
86
87
Wsusu m
asuk (
kg/m
nt)
0 20 40 60 80 100 120600
800
1000
1200
Q (
kJ/m
nt)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1200
2
4
6
Tsusu k
elu
ar
(deg C
)
0 20 40 60 80 100 12035
36
37
Tsusu m
asuk (
deg C
)
0 20 40 60 80 100 12084
85
86
87
Wsusu m
asuk (
kg/m
nt)
0 20 40 60 80 100 120600
800
1000
1200
Q (
kJ/m
nt)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1200
2
4
6
Tsusu k
elu
ar
(deg C
)
0 20 40 60 80 100 12035
36
37
Tsusu m
asuk (
deg C
)
0 20 40 60 80 100 12084
85
86
87
Wsusu m
asuk (
kg/m
nt)
0 20 40 60 80 100 120600
800
1000
1200Q
(kJ/m
nt)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1200
2
4
6
Tsusu k
elu
ar
(deg C
)
0 20 40 60 80 100 12035
36
37T
susu m
asuk (
deg C
)
0 20 40 60 80 100 12084
85
86
87
Wsusu m
asuk (
kg/m
nt)
0 20 40 60 80 100 120600
800
1000
1200
Q (
kJ/m
nt)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1200
2
4
6
Tsusu k
elu
ar
(deg C
)
0 20 40 60 80 100 12035
36
37
Tsusu m
asuk (
deg C
)
0 20 40 60 80 100 12084
85
86
87
Wsusu m
asuk (
kg/m
nt)
0 20 40 60 80 100 120600
800
1000
1200
Q (
kJ/m
nt)
waktu (menit)
Set Point
Output
Gambar 13. Profil output dan set point dengan asumsi
time delay = 4 menggunakan metode Tyreus-
Luyben
Gambar 14. Profil output dan set point dengan asumsi
time delay = 5 menggunakan metode Tyreus-
Luyben
Penyetelan menggunakan metode Hagglund-
Astorm
Pada metode ini, untuk memperoleh harga Kc
dan i , harga K1, , dan θ yang terdapat pada
fungsi transfer langsung dimasukkan pada
persamaan yang terdapat pada Tabel 2 sehingga
diperoleh harga parameter pengendali dengan
berbagai asumsi time delay pada Tabel 7.
Tabel 7. Harga parameter pengendali Hagglund-Astorm
Time delay Kc i
1 -2833,7820 5,3649
2 -1441,3000 8,6545
3 -977,1393 10,9328
4 -745,0589 12,6424
5 -605,8107 14,0006
Gambar 15-19 menunjukkan profil set point
dan output dengan berbagai asumsi time delay.
Gambar 15. Profil output dan set point dengan asumsi
time delay = 1 menggunakan metode
Hagglund-Astorm
Gambar 16. Profil output dan set point dengan asumsi
time delay = 2 menggunakan metode
Hagglund-Astorm
Gambar 17. Profil output dan set point dengan asumsi
time delay = 3 menggunakan metode
Hagglund-Astorm
Gambar 18. Profil output dan set point dengan asumsi
time delay = 4 menggunakan metode
Hagglund-Astorm
Gambar 19. Profil output dan set point dengan asumsi
time delay = 5 menggunakan metode
Hagglund-Astorm
Berdasarkan Gambar 15-19, semakin besar
asumsi time delay maka profil output akan
semakin menjauhi set point. Berikut adalah
perbandingan hasil uji SSE (Sum of Square
Error) antara metode Tyreus-Luyben dan
Hagglund-Astorm:
0 20 40 60 80 100 1201.5
2
2.5
3
3.5
4
4.5
To
(d
eg
C)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1201.5
2
2.5
3
3.5
4
4.5
To
(d
eg
C)
waktu (menit)
Set Point
Output
0 20 40 60 80 100 1201.5
2
2.5
3
3.5
4
4.5
To
(d
eg
C)
Waktu (menit)
Set Point
Output
0 20 40 60 80 100 1201.5
2
2.5
3
3.5
4
4.5
To
(d
eg
C)
Waktu (menit)
Set Point
Output
0 20 40 60 80 100 1201.5
2
2.5
3
3.5
4
4.5
To
(d
eg
C)
Waktu (menit)
Set Point
Output
0 20 40 60 80 100 1201.5
2
2.5
3
3.5
4
4.5
To
(d
eg
C)
Waktu (menit)
Set Point
Output
0 20 40 60 80 100 1201.5
2
2.5
3
3.5
4
4.5
To
(d
eg
C)
Waktu (menit)
Set Point
Output

Jurnal Rekayasa Proses, Vol. 12, No. 2, 2018, hlm. 10-18
18
Tabel 8. Harga uji SSE
Time delay SSE
Tyreus-Luyben Hagglund-Astorm
1 6,8160 12,8880
2 8,2288 20,9121
3 9,3019 28,9754
4 11,0796 37,1813
5 12,9081 45,3328
Dari kedua metode di atas, metode Tyreus-
Luyben lebih dipilih karena nilai error-nya lebih
kecil bila dibandingkan dengan metode
Hagglund-Astorm. Maka untuk sistem
pendinginan susu secara kontinu ini, metode
pengendali yang paling sesuai digunakan adalah
metode Tyreus-Luyben. Namun demikian,
investigasi lebih lanjut perlu dilakukan,
khususnya untuk kasus disturbance rejection,
sebab data di atas adalah untuk setpoint tracking.
Hal ini disebabkan karena umumnya harga
setpoint adalah tetap untuk kasus pendinginan
susu. Perubahan set point dalam hal ini jarang
dilakukan.
Dari aspek kemudahan dalam melakukan
penyetelan (tuning), tampak bahwa metode
Hagglund-Astorm lebih mudah dilakukan
dibandingkan metode Tyreus-Luyben. Metode
Tyreus-Luyben lebih rumit karena membutuhkan
analisis respon frekuensi dengan membuat
diagram Bode terlebih dahulu.
4. Kesimpulan
Hasil yang diperoleh menunjukkan bahwa
kinerja pengendali yang disetel menggunakan
metode Tyreus-Luyben lebih baik dibandingkan
dengan metode Hagglund-Astorm. Hal ini
ditunjukkan dengan nilai SSE yang jauh lebih
kecil (pada semua asumsi time delay). Saran dari
penelitian ini adalah perlu dilakukan identifikasi
dengan metode lain yang ada pada System
Identification Toolbox untuk memperoleh model
matematis, serta perlu dicoba metode pengendali
lainnya.
Ucapan Terima Kasih
Penulis mengucapkan terimakasih kepada
Universitas Surabaya yang telah mendukung
penelitian ini.
Daftar Pustaka
Agustriyanto, R., 2018, kendali sistem bioreaktor
kontinu, Jurnal Teknik Kimia USU, 7, 1-4.
Coughanowr, D.R., LeBlanc, S.E., 2009, Process
Systems Analysis and Control, 3rd ed,
McGraw-Hill’s, New York.
Haugen, Finn, 2010, Comparing PI tuning
methods in a real benchmark temperature
control system, Model., Identif. Control, 31,
79-91.
Murphy, Michael D. Upton, John. O’Mahony,
Michael J., 2012, Rapid milk cooling control
with varying water and energy consumption,
Bioprocess. Eng., 116, 15-22.
Ramdani, Evan, 2015, Parameter identifikasi
transfer fungsi menggunakan MATLAB,
Setrum, 4, 1-7.
Ruangwuttayanusorn, Khanitta. Promket,
Doungnapa. Ahantiratikul, Anut, 2016,
Monitoring the hygiene of raw milk from
farms to milk retailers, Agriculuture and
Agricultural Science Procedia, 11, pp. 95-99.
Shahrokhi, M., Zomorrodi, A., 2018,
Comparasion of PID Controller Tuning
Methods, Department of Chemical &
Petroleum Engineering, Sharif University of
Technology
Sheng Pai, Neng. Chichang, Shih. Tsung Huang,
Chi, 2009, Tuning PI/PID controllers for
integrating processes with deadtime and
inverse response by simple calculation,
Journals of Process Control, 20, 726-723.
Suwito, Widodo, 2009, Bakteri yang Sering
Mencemari Susu: Deteksi, Patogenesis,
Epidemiologi, dan Cara Pengendaliannya,
Balai Pengkajian Teknologi Pertanian
Yogyakarta, 96-100.
Toledo, Victor Toires. Meissnes, Klaus. Coronas,
Alberto. Mulles, Joachim, 2015, Performance
characterisation of a small milk cooling
system with ice storage for PV applications,
Int. J. Refrig., 60, 81-91.

Jurnal Rekayasa Proses, Vol. 12, No. 2, 2018, hlm. 10-18
1