UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO - UFERSA ... · e Gauss-Seidel e aos métodos diretos de...
59
UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO - UFERSA DEPARTAMENTO DE CIÊNCIAS EXATAS, TECNOLÓGICAS E HUMANAS - DCETH CAMPUS ANGICOS BACHARELADO EM CIÊNCIA E TECNOLOGIA EMERSON TALLES PESSOA ADELINO ESTUDOS E COMPARAÇÃO ENTRE SOLUÇÕES NUMÉRICAS DE SISTEMAS DE EQUAÇÕES LINEARES PELOS MÉTODOS GAUSS-SEIDEL, GAUSS-JACOBI, FATORAÇÃO LU E QR, E MEDIDAS EXPERIMENTAIS EM CIRCUITOS ELÉTRICOS ANGICOS-RN 2013
-
Upload
vuongduong -
Category
Documents
-
view
215 -
download
0
Transcript of UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO - UFERSA ... · e Gauss-Seidel e aos métodos diretos de...

UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO - UFERSADEPARTAMENTO DE CIÊNCIAS EXATAS, TECNOLÓGICASE HUMANAS - DCETHCAMPUS ANGICOSBACHARELADO EM CIÊNCIA E TECNOLOGIA
EMERSON TALLES PESSOA ADELINO
ESTUDOS E COMPARAÇÃO ENTRE SOLUÇÕES NUMÉRICAS DE SISTEMAS DEEQUAÇÕES LINEARES PELOS MÉTODOS GAUSS-SEIDEL, GAUSS-JACOBI,
FATORAÇÃO LU E QR, E MEDIDAS EXPERIMENTAIS EM CIRCUITOS ELÉTRICOS
ANGICOS-RN2013

EMERSON TALLES PESSOA ADELINO
ESTUDOS E COMPARAÇÃO ENTRE SOLUÇÕES NUMÉRICAS DE SISTEMAS DEEQUAÇÕES LINEARES PELOS MÉTODOS GAUSS-SEIDEL, GAUSS-JACOBI,
FATORAÇÃO LU E QR, E MEDIDAS EXPERIMENTAIS EM CIRCUITOS ELÉTRICOS
Monografia apresentada a UniversidadeFederal Rural do Semi-Árido - UFERSA,Campus Angicos para a obtenção do tí-tulo de Bacharel em Ciência e Tecnolo-gia. Orientador: Profo. M.Sc. WivaldoDantas de Asevedo Junior - UFERSA
ANGICOS-RN2013


Aos meus avôs Sebastião Quintiliano Pessoa e Judite Xavier Pessoa [in memoria], por tudoque fizeram por mim quando criança e pelos ensinamentos passados.
A minha família, especialmente aos meus pais:Francisco Adelino Sobrinho e Lúcia deFátima Pessoa Adelino, que sempre me apoiou em tudo e nunca deixou faltar nada, sempre
mostrando o certo e o errado além de me incentivar a não desistir dos meus objetivos.
AGRADECIMENTOS
Agradeço primeiramente a DEUS que me deu o dom da vida. Agradeço também pela forçadedicada a mim para chegar até o final dessa jornada, iluminando meu caminho onde encontreibarreiras e ele me ajudou a superá-las e assim pude concluir esse trabalho.
Em especial os meus pais o Senhor: Francisco Adelino Sobrinho e a Senhora: Lúcia de Fá-tima Pessoa Adelino por sempre ter acreditado em mim, pelo apoio e por me ensinarem semprea seguir o caminho certo, além do amor dedicadoo a mim durante toda minha vida. A meu ir-mão Erike Thiele Pessoa Adelino que de forma especial e carinhosa me deu força e coragem, meapoiando nos momentos de dificuldades, que mesmo não morando conosco sempre me mostrouque o caminho era estudar e nunca mediu esforços para tudo que eu precisasse, pois se não fosseele não estaria hoje aqui concluindo esse trabalho, pois foi o mesmo que me incentivou a fazeraquele vestibular e hoje dedico esse vitoria a ele. Agradeço também a minha cunhada CamilaLourenço pela ajuda e o incentivo.
A minha namorada Kaline Vanessa de Matos que sempre me deu apoio e incentivo da me-lhor forma possível, sendo compreensiva, amável e companheira nas horas que mais precisei.
Agradeço também aos responsáveis pela instalação do Campus UFERSA-Angicos que mudoumuito minha vida depois da chegada do mesmo, pois foi através dela que realizei meu primeiroobjetivo ter um curso superior e com isso vou conseguir se DEUS quiser terminar o curso quesempre almejei fazer que é engenharia civil.
A todos os meus colegas de curso pelo convívio fraternal e familiar, que nos momentos maisdifíceis conseguimos superar as dificuldades e chegar até os nossos objetivos, entre eles destacoalguns: Marcos Antônio, Fernanda Rizia, Erickson Romualdo, Italo Menezes, João PauloCaraú, Thalis Ginani, Emanuel Erivan, Janielly Kaline, Joaquim de Souza, Gilvan Ribeiro,Samuel Rodrigues, José Eliedson, Valdeir Tavares, José Humberto, e entre outros que não deupara citar aqui.
Agradeço ao meu amigo "monitor"Anderson Reis pela paciência e por toda a dedicação ofertadaa mim, principalmente na reta final do meu trabalho, pois ele também tem uma boa contribuiçãona minha vitoria.
Ao meu orientador Wivaldo Junior, por ter confiado e acreditado que eu era capaz de de-senvolver esse trabalho, e sempre estava a minha disposição, ao meu co-orientador MatheusMenezes por sempre está à disposição para ouvir pacientemente as minhas considerações e terpartilhado comigo as suas idéias referentes ao meu trabalho.
A todos os professores que passaram um pouco dos seus conhecimentos para mim, em espe-cial: Gleidson Vieira, Alessandra Carla, Ana Cristina, Ivan Mezzomo, Núbia Alves, MarcileneVieira, Joselito Cavalcante, Matheus Menezes, Vinicius Samuel, Aerson Barreto, AlexsandroLima, Maristelio da Cruz, Francisco Edcarlos Leite, Fabrícia Nascimento, Sâmea Valensca e atodos que contribuíram direta ou indiretamente com o meu crescimento durante esse curso.
Obrigado a todos os meus familiares e amigos mesmo não estando citados aqui, que tanto con-tribuíram para o meu sucesso, agradeço muito por acreditarem nesta realização. Serei a todosinfinitamente grato.

RESUMO
Este trabalho tem por objetivo analisar circuitos elétricos através das Leis de Kirchhoff, as leisdas malhas e a lei dos nós, e decorrente desta análise obter um conjunto de equações que for-mam um sistema de equações lineares. A partir deste sistema de equações serão usados métodosnuméricos para se encontrar sua solução. O referido trabalho tem caráter revisional bibliográficoacerca das Leis de Kirchhoff e de métodos numéricos computacionais de resolução de sistemade equações lineares em especial os dos métodos diretos de fatoração LU e QR, e dos métodositerativos de Gauss-Jacobi e Gauss-Seidel para que assim possamos ilustrar o funcionamentoe aplicação de cada um deles em problemas reais. Visando analisar a eficiência dos métodos,os testes são realizados com o auxílio computacional de um software denominado de Scilab.É importante destacar que os métodos numéricos tiveram sua convergência provada para taismétodos, como também para testes em laboratório usando circuitos reais, mediante a isso, veri-ficar qual deles melhor se adequará a aplicação de problemas reais aos métodos estudados. Paraa realização dos testes foram escolhidos dois problemas com características semelhantes comuma alteração nos valores das resistências, onde os métodos diretos foram melhores do que ositerativos. Finalizamos o trabalho fazendo um comparativo entre os métodos utilizados tanto osvalores obtidos através do software como os medido em laboratório.
Palavras Chave: Leis de Kirchhoff. Fatoração LU. Fatoração QR. Gauss-Seidel.

LISTA DE TABELAS
Tabela 1 - Dados obtidos computacionalmente para o problema 01 . . . . . . . . . 41Tabela 2 - Dados obtidos computacionalmente para o problema 02 . . . . . . . . . 42Tabela 3 - Escalas Utilizadas para as correntes . . . . . . . . . . . . . . . . . . . . 43Tabela 4 - Escalas Utilizadas para as tensões . . . . . . . . . . . . . . . . . . . . . 43Tabela 5 - Escalas Utilizadas para as resistências . . . . . . . . . . . . . . . . . . . 43Tabela 6 - Valores medidos no laboratório . . . . . . . . . . . . . . . . . . . . . . 44Tabela 7 - Valores do erro relativo percentual do problema 01 . . . . . . . . . . . . 45Tabela 8 - Valores do erro relativo percentual do problema 02 . . . . . . . . . . . . 46Tabela 9 - Valores das incertezas das medidas no problema 01 . . . . . . . . . . . . 48Tabela 10 - Valores das incertezas das medidas do problema 02 . . . . . . . . . . . . 49

LISTA DE FUGURAS
Figura 1 - Esquema de aplicação da lei dos nós . . . . . . . . . . . . . . . . . . . . 17Figura 2 - Cicuito com malha única . . . . . . . . . . . . . . . . . . . . . . . . . . 18Figura 3 - Circuito com 3 malhas . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Figura 4 - Circuito modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Figura 5 - Gráfico problema 01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Figura 6 - Gráfico problema 02 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50

SÚMARIO
1 INTRODUÇÃO 121.1 JUSTIFICATIVA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.2 OBJETIVOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.2.1 Objetivo geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.2.2 Objetivos Específicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.2.3 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2 LEI DE KIRCHHOFF 152.1 LEI DOS NÓS DE KIRCHHOFF . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2 LEI DAS MALHAS DE KIRCHHOFF . . . . . . . . . . . . . . . . . . . . . . . 18
3 SOLUÇÃO DE SISTEMAS DE EQUAÇÕES LINEARES 223.1 EQUAÇÃO LINEAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.2 SISTEMA DE EQUAÇÃO LINEAR . . . . . . . . . . . . . . . . . . . . . . . . . 223.3 CLASSIFICAÇÕES DOS SISTEMAS LINEARES . . . . . . . . . . . . . . . . . 233.3.1 Classificação quanto aos números de equações e variáveis . . . . . . . . . . . . . 233.3.2 Homogeneidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.3.3 Classificação quanto ao número de solução . . . . . . . . . . . . . . . . . . . . . 243.3.4 Quanto ao tamanho do sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.4 MÉTODOS DE SOLUÇÃO PARA SISTEMAS DE EQUAÇÕES LINEARES . . 253.5 MÉTODOS DIRETOS OU EXATOS . . . . . . . . . . . . . . . . . . . . . . . . 253.5.1 Retrosubstituição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.5.2 Método de eliminação de Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.5.3 Fatoração LU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.5.4 Método de Francis (ou método QR) . . . . . . . . . . . . . . . . . . . . . . . . . 293.5.5 Estratégia de pivoteamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.5.6 Condicionamento de matrizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.6 MÉTODO ITERATIVOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.6.1 Condições de convergência para métodos iterativos . . . . . . . . . . . . . . . . . 363.6.2 Critérios de parada dos métodos iterativos . . . . . . . . . . . . . . . . . . . . . . 363.7 MÉTODO ITERATIVO DE GAUSS-JACOBI . . . . . . . . . . . . . . . . . . . . 373.8 MÉTODO ITERATIVO DE GAUSS-SEIDEL . . . . . . . . . . . . . . . . . . . . 38
4 METODOLOGIA, APRESENTAÇÃO E DISCURSSÃO DOS RESULTADOS 394.1 METODOLOGIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.2 PROBLEMAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.2.1 Problema 01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.2.2 Problema 02 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.2.3 Medições em circuitos reais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5 CONSIDERAÇÕES FINAIS 52
REFERÊNCIAS 55
APÊNDICE A 56
APÊNDICE B 58
12
1 INTRODUÇÃO
Desde muitos anos a ciência vem exercendo um papel importante na compreensão defenômenos e posterior desenvolvimento de modelos com grande grau de aplicabilidade emnosso cotidiano. Dentre as ciências, a Física é considerada a mais fundamental das ciênciasnaturais, sendo também aquela cuja formulação atingiu o maior grau de refinamento (NUSSEN-ZVEIG, 2002).
Nesse passo, é de se observar que muitos dos problemas encontrados pelas chamadasciências exatas possuem como solução final a resolução de sistemas de equações lineares. Emoutras palavras, muitos dos problemas que surgem, por exemplo, na física e na engenharia,somente podem ser resolvidos por meio dos sistemas de equações lineares e de outras aplicaçõesque existem seja na matemática seja em outras áreas do conhecimento como a economia e atémesmo a administração (BURDEN; FAIRES, 2008).
De fato, tais cálculos são aplicados cotidianamente nas estruturas da construção civil, naotimização de sinais de trânsito, no equilíbrio estático, nas soluções de equações diferenciais,nas vibrações, dentre outras. Assim, Leon (2008, p. 1) afirma que "mais de 75% dos proble-
mas matemáticos encontrados em aplicações cientificas e industriais envolvem a resolução de
sistemas lineares em algum estágio".O estudo e utilização de circuitos elétricos, como se pretende expor ao longo desse tra-
balho, também estão inseridos na análise de sistemas de equações lineares. Nesse sentido, é dese observar que foi baseado nos conceitos básicos de física e matemática, que Gustav RobertKirchhoff (1824-1887) desenvolveu o que conhecemos como as Leis de Kirchhoff (conhecidastambém como leis dos nós e das malhas) e que as referidas leis são utilizadas até hoje paraestudar circuitos elétricos. Uma visão detalhada das conclusões de Kirchhoff é o suficiente pararevelar que se tratam de regras práticas resultantes de aplicações de leis mais fundamentais daFísica. Desta forma a lei dos nós se mostra como outra forma de enunciar a lei de conser-vação de cargas em um circuito elétrico e, de outro modo, a lei das malhas se presta a enunciaro princípio de conservação da energia (HALLIDAY; RESNICK; WALKER, 2010). SegundoYoung e Freedman (2009), essa lei é fundamentada e baseada na natureza conservativa dasforças eletrostática.
A aplicação das leis de Kirchhoff em um circuito elétrico resulta em um conjunto deequações e incógnitas, que caracteriza um sistema de equações lineares. Existem na literaturavários métodos para resolver um sistema de equações lineares, especialmente àqueles sistemasque possuem um número de equações igual ao número de incógnitas. Nesse sentido, um sistemade equação linear é composto por m equações e n incógnitas, de modo que quando m = n, temosum sistema de equações lineares na forma quadrada (LEON, 2011).
Essa característica é importante, pois permite a aplicação de várias técnicas de cálculoscom a utilização de métodos diversos para resolução desses tipos de sistemas, tais como osmétodos diretos, iterativos e de otimização (SPERANDIO et al., 2003).

13
Desta forma, dependendo das dimensões do circuito elétrico a ser estudado, vê-se autilização de métodos numéricos computacionais como alternativa mais viável para a soluçãodos problemas que surjam. Tal conclusão é adequada porque o uso do computador facilitaa resolução dos sistemas de equações lineares. Nesse passo, os métodos mais utilizados sãoos métodos diretos e os iterativos, os quais exigem pré-condições iniciais para a garantia deobter os resultados desejados. Deste modo, dependendo da função da matriz dos SEL (sistemade equações lineares), deve existir pelo menos um método mais adequado para solucionar asituação em análise. Análise do problema de acordo com as pré-condições do método é de fun-damental importância para encontrar os resultados corretos (ARENALES; DAREZZO, 2010).
1.1 JUSTIFICATIVA
O presente trabalho busca encontrar a solução mais precisa para problemas envolvendocircuitos elétricos decorrentes da aplicação das leis de Kirchhoff, bem como estudar a importân-cia da utilização dos métodos numéricos na resolução de equações lineares, uma vez que oassunto apresenta vasta aplicação em diversificadas áreas do conhecimento e no cotidiano.
1.2 OBJETIVOS
Este trabalho tem como objetivos compreender e analisar um circuito elétrico através dasleis de Kirchhoff que são: a lei dos nós e a lei das malhas para que depois possamos aplicar osmétodos numéricos para assim chegar à solução comparando também com valor experimentalmedido em laboratório.
1.2.1 Objetivo geral
Verificar os valores que serão obtidos pelos métodos numéricos através das análisesfeitas nos circuito elétrico modelado, compararando os valores obtidos com os valores encon-trados em medidas experimentais de laboratório realizadas em circuito real.
1.2.2 Objetivos Específicos
Os objetivos específicos serão:
• Estudar a aplicação das leis de Kirchhoff em um circuito elétrico e obter um sistemade equações lineares que nos forneça uma solução para grandezas físicas como correnteelétrica nos resistores do circuito;
• Analisar os aspectos teóricos e práticos referentes aos métodos iterativos de Gauss-Jacobie Gauss-Seidel e aos métodos diretos de fatoração LU tradicional e fatoração QR, anali-sando sua aplicabilidade ao problema estudado;
• Fazer um comparativo entre os métodos com os valores medidos em laboratórios;

14
• Analisar a aplicabilidade de cada método de acordo com as suas propriedades.
1.2.3 Metodologia
O corrente trabalho foi explanado com base em uma pesquisa bibliográfica e experi-mental acerca do conteúdo abordado, tudo isso baseada em literaturas relacionadas à área emestudo, de forma a atingir o entendimento e o domínio a respeito do assunto estudado.
A organização deste trabalho a partir da introdução se dará da seguinte forma: No próxi-mo capitulo, falaremos sobre as leis de Kirchhoff e suas aplicações e mostraremos que o seuuso resultará em um sistema de equações lineares. No capítulo 3, apresentaremos a fundamen-tação teórica matemática que dará suporte aos métodos no qual serão usados para encontra asolução do sistema de equações lineares que são: fatoração LU, fatoração QR, Gauss-Seidele Gauss-Jacobi descrevendo o funcionamento de cada um deles. No capítulo 4, apresentare-mos a metodologia utilizada no trabalho e os resultados obtidos usando um modelo numéricocomputacional, e as medidas obtidas em laboratórios aplicadas a um circuito real estabelecendoum comparativo entre as duas medidas. No capítulo 5, faremos as considerações finais so-bre o trabalho e os resultados obtidos computacionalmente e por medidas em laboratório ondediscutiremos os resultados obtidos pelos métodos computacionais utilizados, sua eficiência eaplicabilidade.
15
2 LEI DE KIRCHHOFF
Na atualidade, a eletricidade se tornou uma indispensável forma de energia para ohomem: com a sua utilização surgiram várias aplicações como a iluminação, comunicação,aquecimento além dos aparelhos de utilização domestica como televisão, rádio e entre outros.Nas indústrias a eletricidade exerce um papel fundamental onde movimenta máquinas para queassim elas executem vários tipos de tarefas. Com o avanço da tecnologia, praticamente todas asaplicações desenvolvidas para a utilização da energia elétrica possuem circuitos elétricos.
Diante disso, antes de tais aplicações chegarem as nossas residências passaram por umperíodo de desenvolvimento onde os circuitos elétricos que os compõem tiveram que ser es-tudados e desenvolvidos. Sabendo disso quase sempre nos deparamos com alguns problemasfísicos, quando tentamos resolver algum tipo de circuito elétrico. Com isso teremos que recor-rer muitas vezes a alguns artefatos que nos forneçam a solução desse circuito. Quase sempreessas ferramentas envolvem conceito de eletricidade, fazendo com que para isso tenhamos queusar alguns conjuntos de técnicas matemáticas para obter as soluções adequadas.
Segundo Nussenzveig (1997), os elementos necessários de um circuito é o resistor, ocapacitor, o indutor e gerador. Para Gussow (1997), circuito elétrico na pratica tem que constarde no mínimo quatro partes: são eles (1) condutores, (2) força eletromotriz, (3) uma carga e(4) instrumento de controle. Cada um desses tem uma representação: a força eletromotriz é abateria, os condutores são representados por fios que conectam varias partes do circuito paraconduzir a corrente, já o resistor é um elemento resistivo, oferecendo resistência à passagem dacorrente, e o dispositivo de controle é a chave.
As grandezas envolvidas em um circuito elétrico são a tensão elétrica que é medida emVolt(V), resistência em Ohm (Ω) e corrente elétrica, medida em Ampère (A). Conforme livroU.S.NAVY (2002), duas cargas diferentes vão estar acopladas por meio de um condutor, essecircuito é completado para o fluxo de corrente. Em um circuito elétrico a corrente convencionalflui do pólo positivo da bateria para o pólo negativo completando assim o circuito. Caso ocircuito venha a ser interrompido em algum ponto ocorrerá à interrupção do fluxo de corrente.
Os circuitos elétricos podem ser usados de várias formas, vai depender qual se adequaramelhor ao projeto a ser desenvolvido e a sua finalidade. Um circuito elétrico pode conter asso-ciações de resistores em série, em paralelo, chegando até possuir os dois ao mesmo tempo. Exi-stem também associações de resistores, como a ponte de Wheaststone, e circuitos envolvendomais de uma fonte que não pode ser reduzida por intermédio da lei de Ohm e das associaçõesem paralelo e série. Segundo Hallyday, Resnick e Walker (2010) a ponte de Wheaststone é ummétodo mais refinado de medir resistência elétrica com extrema precisão onde são conhecidostrês valores de resistência e uma não. Para Young e Freedman (2009) não é só os resistores quese encontram presentes nos circuitos. Podemos encontrar outros elementos como indutores,capacitores, transistores, diodos e entre outros elementos. Um importante ponto que temos quedestacar é o tipo de corrente que pode ser aplicada no circuito, que pode ser alternada, contínua,

16
ou também ter as duas atuando ao mesmo tempo. Para Young e Freedman (2009, p. 168) "cor-rente contínua, nos quais o sentido da corrente não varia com o tempo. Já corrente alternada,
na qual a corrente oscila, alternando seu sentido para a frente e para trás".Com o objetivo de facilitar o estudo dos circuitos elétricos e resolver muitos proble-
mas ligados ao desenvolvimento e construção de circuitos elétricos, o físico alemão chamadode Gustav Robert Kirchhoff (1824-1887) desenvolveu uma forma de resolver esses problemasenvolvendo circuitos elétricos e obter parâmetros relevantes, como a corrente elétrica. Em suahomenagem foram criadas as Leis de Kirchhoff: Lei dos nós e lei das malhas, que são regraspráticas baseadas em princípios fundamentais da física que serão discutidas mais adiante. Deposse disso ele ampliou a aplicação da lei de Ohm, um conceito que era relativamente simplesas tensões que envolvem um determinado circuito.De acordo com Young e Freedman (2009),em muitos casos envolvendo resistores elétricos não podemos reduzir a combinação simplesque há entre os resistores em séries e em paralelo. As leis desenvolvidas por Kirchhoff aju-daram a resolver muitos problemas que eram de difícil solução, ou até mesmo impossível de serresolvido pela lei de ohm (U.S.NAVY, 2002).
A análise de um circuito elétrico qualquer pelas leis de Kirchhoff nos fornecer um sis-tema de equações lineares. Segundo Young e Freedman (2009), sempre que usarmos as leisde Kirchhoff seja a das malhas ou dos nós sempre teremos o número de equações iguais aonúmero de incógnita, para que assim possamos chegar a um sistema de equações possível edeterminado.
2.1 LEI DOS NÓS DE KIRCHHOFF
A lei dos nós de Kirchhoff, também é conhecida como a 1a lei de Kirchhoff. Antes deenunciar a lei dos nós se faz necessário primeiramente definir o que é um "nó"em um circuitoelétrico. Segundo Young e Freedman (2009, p. 173) "nó ou junção é um ponto do circuito onde
ocorre a união de dois ou mais condutores". A lei dos nós nos diz que a soma das correntes quechegam a um nó é igual a soma das correntes de saem do nó. A figura abaixo representa bemisso.
17
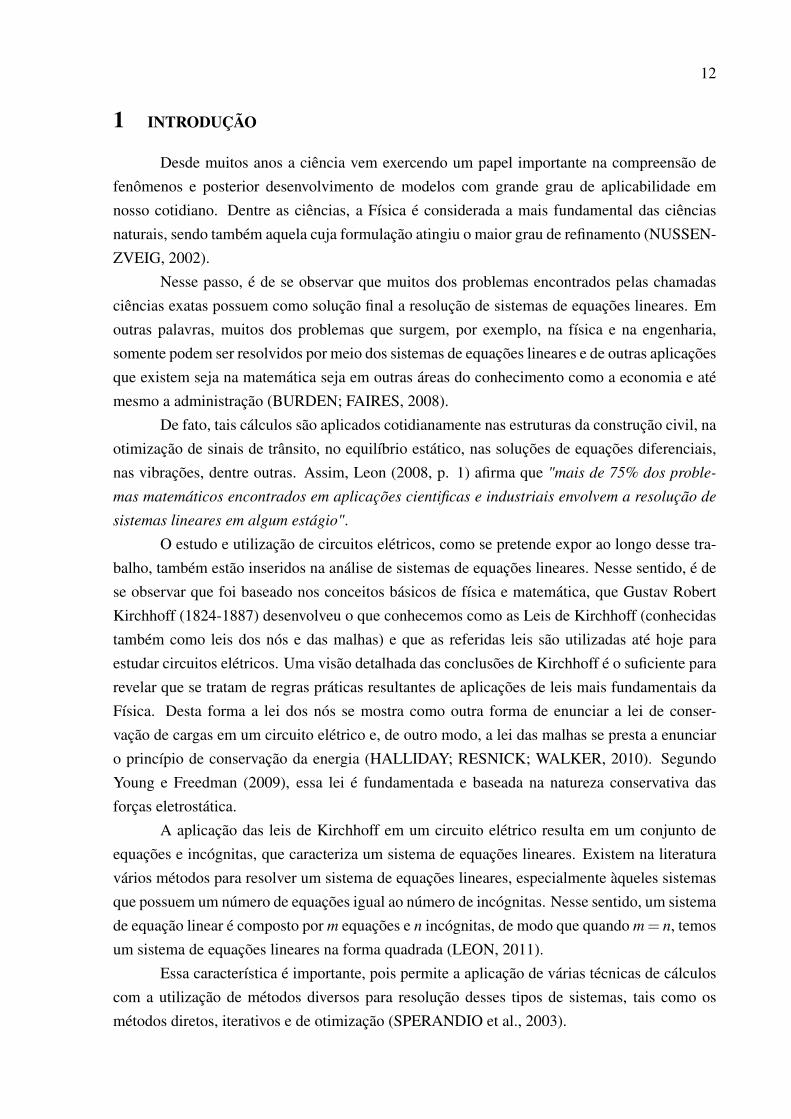
Figura 1: Esquema de aplicação da lei dos nós
Fonte: Adaptado de ISEP (2007).
Ou também pode ser representado pela equação:
∑ I que chegam = ∑ I que entram (1)
Onde I representa as correntes elétrica. Para a situação demonstrada na figura a lei dos nós deKirchhoff nos fornece que:
I1 + I3 = I2 + I4 (2)
Na literatura, existem outras definições para a Lei dos nós de Kirchhoff. Para Young eFreedman (2009, p. 173) "leis dos nós de Kirchhoff: a soma algébrica de todas as correntes
que entram ou saem de um nó é igual a zero".
∑ I = 0 (3)
(A lei será valida para qualquer nó)
A lei dos nós de Kirchhoff é uma regra prática baseada em um princípio físico maisfundamental. Conforme Halliday, Resnick e Walker (2010, p. 176) "a lei dos nós trata-se
simplesmente de outra forma de enunciar a lei da conservação da carga: cargas não podem ser
criadas nem destruídas em um nó". Ainda nesse mesmo contexto, de acordo com Nussenzveig(1997), a conservação da carga elétrica é considerada um princípio geral, que até hoje nunca seencontrou qualquer violação, pois o total de carga em um sistema isolado jamais se altera. Ouseja, essa lei só será valida da decorrência da continuação da carga elétrica total que existir emum circuito, isso porque a quantia de carga que sai será a mesma que vai entrar e com isso auma sustentação de que não vai haver qualquer tipo de acumulação ou perda de cargas nos nós.
Para resolver um circuito elétrico vamos ter que desenvolver as equações referentesaquele circuitos, que são geradas depois de analisar cada nó, mais não podem esquecer se o

18
circuito em estudo vai satisfazer a lei de Kirchhoff. Atentando para isso vamos ter também queescolher um nó de referência, ou seja, de onde vamos sair para percorrer o circuito. Vamospoder escrever as equações para cada nó, com exceção de usar nó que delimitamos como dereferência, pois esse número de equação necessária ser igual à quantidade (n− 1) onde n vaiser o número de nó. Caso valor da corrente seja negativo não quer dizer quem o mesmo estejaerrado vai. Depender do sentido da corrente escolhida por que resolveu o problema.
2.2 LEI DAS MALHAS DE KIRCHHOFF
Também conhecida como 2a lei de Kirchhoff, método das malhas ou método das tensões.A lei das malhas nos diz que a soma das tensões em um circuito, ou percurso fechado, será iguala zero. Ou seja, a tensão que for aplicada por uma fonte terá que ser igual soma das quedas eelevações de tensões ao longo do percurso fechado. Primeiramente vamos definir o que é uma"malha". Segundo Gussow (2009) podemos dizer que uma malha é um percurso fechado emum circuito, onde partimos de um ponto do circuito, pode ser um nó, e retornamos a este mesmoponto.
Existem na literatura várias formas de enunciar a Lei das malhas. Para Nussenzveig(1997, p. 192) "a soma de todas as quedas de tensões ao longo de uma malha em um circuito é
nula".
Figura 2: Cicuito com malha única
Fonte: Adaptado de Gussow (1997)
Analisando o circuito apresentado na figura 2 com a utilização das leis das malhas,podemos obter a equação abaixo.
V =V1 +V2 +V3 (4)
Onde:V é a tensão de alimentação do circuito (fonte);V1 é a tensão no resistor R1;V2 é a tensão no resistor R2;

19
V3 é a tensão no resistor R3.
Fazendo um rearranjo na equação anterior teremos:
V −V1−V2−V3 = 0 (5)
Ou,V − (V1 +V2 +V3) = 0 (6)
que está de acordo com Gussow (1997, p. 136) que afirma: "a soma algébrica das subidas ou
aumentos e quedas de tensões deve ser igual a zero".O potencial elétrico é a energia por unidade de carga onde podemos associar a lei das
malhas ao princípio da conservação da energia (HALLIDAY; RESNICK; WALKER, 2010). Deacordo com Young e Freedman (2009), essa lei é fundamentada e baseada na natureza con-servativa das forças eletrostática isso porque se você percorrer o circuito em uma determinadamalha, medindo as diferenças de potencial que nele existe, quando retornamos ao ponto de par-tida conseqüentemente, a soma algébrica das diferenças medidas terá que ser igual a zero casocontrario, você não poderá associar um ponto referido para esse potencial.
∑V = 0 (7)
(A lei é valida para qualquer malha)
De acordo com SILVA FILHO (2007), para que uma corrente elétrica se mantenha etenha uma boa interação com um determinado condutor, será imprescindível que esse condutoresteja ligado entre dois pontos que possam geram energia para os elétrons. Caso esses doispontos tenham essa capacidade, indicará que existe uma diferença de potencial entre eles.
Existem algumas regras práticas a se levar em consideração na aplicação das leis dasmalhas em um circuito. A primeira regra prática a ser considerada é em relação ao elementoresistivo, ou resistor. Ao escolhermos percorrer uma malha, seja em qualquer sentido, se essesentido coincidir com a direção da corrente que percorre o resistor a tensão que percorre este ele-mento será negativo, caso as direções não coincidam considera-se a tensão como sendo positiva.A outra regra prática é em relação à fonte de energia, ou elemento de força eletromotriz (fem).Caso a direção adotada para o percurso coincida com a direção de aumento do potencial nafem (do - para o +), considera-se a tensão como positiva (HALLIDAY; RESNICK; WALKER,2010). Podemos perceber que a lei das malhas não dependerá do caminho a ser percorrido namalha, isso porque se adotarmos o sentido anti-horário, as quedas se tornarão elevações e aselevações se tornarão quedas,fazendo isso trocarmos os sinais e onde é positivo fica negativo evice-versa.
Para começar a estudar uma malha é necessário primeiramente definir o sentido em quea corrente elétrica percorre esta malha. Na literatura usualmente é utilizado o sentido horário,

20
mais isso fica a critério de quem vai estudar o problema. Como convencionalmente a correnteelétrica é no sentido do movimento dos portadores de cargas positivas, embora se saiba que emum condutor a corrente real é a dos elétrons, outro critério a ser adotado para definir o sentidoda corrente elétrica no circuito é aquele que parte do pólo positivo da fonte de maior intensidadeno circuito.
Figura 3: Circuito com 3 malhas
Fonte: Adaptado de Gussow (1997)
No caso mostrado na figura 3 foi adotado o sentido horário, e substituído o valor da ten-são em cada resistor por RI, de acordo com a lei de Ohm, obtemos então as seguintes equaçõesdas malhas.
Malha A,B,E,F,A:−R1It−R2I2 +V = 0 (8)
Malha B,C,D,E,B:−R3I3 +R2I2 = 0 (9)
Malha A,C,D,F,A:−R1It−R3I3 +V = 0 (10)
Com isso faremos uma simplificação para se chegar a um sistema de equações linearese assim possamos resolver.
−R1It−R2I2 =−V
−R3I3 +R2I2 = 0−R1It−R3I3 =−V
(11)
Comumente, em um circuito composto de mais de uma malha, portanto composto denós, também utilizamos a lei dos nós que nos garante ao menos mais uma equação. Aplicandoa lei dos nós ao circuito proposto obtemos:

21
It = I2 + I3 (12)
Esta equação complementará as equações encontradas com aplicação das malhas e cons-tituiremos um sistema de equações lineares que pode ser resolvido com a aplicação de váriosmétodos de resolução, sejam analíticos ou numéricos. Abordaremos no capítulo seguinte osmétodos de solução de sistemas de equações lineares.

22
3 SOLUÇÃO DE SISTEMAS DE EQUAÇÕES LINEARES
3.1 EQUAÇÃO LINEAR
Lipschutz (1977) afirma que equação linear é qualquer expressão formada pela soma doproduto de uma constante por uma váriavel de primeiro grau. De acordo com Franco (2006,p. 118), "uma equação é linear se cada termo contém não mais do que uma variável e cada
variável aparecer na primeira potencia".Uma equação linear na forma geral é representada pela seguinte equação,
a1x1 +a2x2 + · · ·+anxn = b (13)
onde, a1,a2, ...,an são conhecidos de coeficientes, e o componente b é apontado como termosindependente e os x1,x2, ...,xn são as incógnitas ou variáveis.
3.2 SISTEMA DE EQUAÇÃO LINEAR
Para Leon (2011) sistema de equação linear é o grupo que conterá mais de uma equaçãolinear, ou seja, é o conjunto de m equações e n incógnitas. Quando m = n, temos um sistemalinear quadrática.
Segundo Leon (2008), quase todos os problemas matemáticos sejam eles industriais oucientificos de alguma forma recai na resolução de um sistema linear por mais complexo que sejaesse sistema, usando alguns dos métodos podemos reduzir esse problema, e até torná-lo maissimples.
As soluções de sistemas de equações lineares são obtidas de forma simples, ao contráriode sistemas formados por equações não lineares, que são sistemas complexos. Se trabalharmoscom sistemas de equações lineares complexos devemos escolher o método que possua um me-lhor desempenho para o sistema em estudo, assim preservando a máxima precisão desejada naresolução do mesmo (FRANCO, 2006).
De acordo com Leon (2008) de uma forma geral um sistema de equações lineares comn incógnita e m equações é representado de maneira genérica conforme se segue:
a11x1 + a12x2 + ... + a1nxn = b1
a21x1 + a22x2 + ... + a2nxn = b2
...
am1x1 + am2x2 + ... + amnxn = bm
(14)
Onde am1x1, ...,amnxn,é a parte dos termos do primeiro membro da equação, am1, ...,amn
são os números reais x1, ...,xn as combinações lineares, ai j e bi são os números reais tal quei = 1 . . .n. e j = 1 . . .n.
23
Esse sistema linear também pode ser representado matricialmente, da seguinte forma:
Ax = b, (15)
onde A é uma matriz quadrara contendo os coeficientes,
A =
a11 a12 ... a1n
a21 a22 ... a2n
.
.
.
am1 am2 ... amn
. (16)
x é o vetor coluna formado pelas variáveis do sistema,
x =
x1
x2
.
.
.
xn
. (17)
e b será o vetor coluna formado pelos termos independentes do sistema,
b =
b1
b2
.
.
.
bn
. (18)
No decorrer desse trabalho denominaremos de x∗ o vetor solução e de x uma soluçãoaproximada do sistema linear Ax = b. O número de linhas será m, e variáveis será n em todo otexto.
3.3 CLASSIFICAÇÕES DOS SISTEMAS LINEARES
Existem várias formas de classificar um sistema de equações lineares baseando-se emdiversos autores, desta forma neste trabalho sera mostrado as classificações a seguir.
3.3.1 Classificação quanto aos números de equações e variáveis
Para Lipschutz (1977 apud OLIVEIRA, 2012), se m> n esse sistema linear será conside-rado subdeterminado, caso m < n ele vai ser hiperdeterminado e será quadrático se m = n, onde

24
n é o número de variáveis e m é o número de equações. Com isso podemos dividir conforme onúmero de equações seja ela maior igual ou até mesmo menor a quantidade de incógnitas.
3.3.2 Homogeneidade
Para FERREIRA (2009, p. 3), "Quando todos os termos independentes forem nulos, isto
é, se bi = 0, i = 0,1, ...,n, o sistema é dito homogêneo". Caso algum dos termos não seja nulo osistema é dito heterogêneo. Todo sistema homogêneo é compatível, pois admitirá pelo menos asolução trivial (x j = 0, j = 0,1,2, ...,n).
3.3.3 Classificação quanto ao número de solução
De acordo com Sperandio et al. (2003), se um sistema não possui solução dizemos queele é inconsistente ou impossível. Caso ele apresentar pelo menos uma única solução ou ocorrerdele admitir infinitas soluções o sistema será dito possível ou consistente.
Sendo det(A), como o determinante da matriz formadas pelos coeficientes do sistema,tem-se uma matriz não singular caso det(A) = 0, dessa forma um sistema com essa classificaçãoterá somente uma solução possível. Caso tenha-se det(A) = 0 o sistema poderá ser classificadocomo simgular, possuindo infinitas soluções, ou inconsistente.
Franco (2006) classifica um sistema linear em função do número de solução que eleadimite, da seguinte forma abaixo:
• Sistema possível: São os que vão assumir pelo menos um resultado. Se o sistema linearfor possível pode ser:
1. Indeterminado, pois permite mais de uma solução;
2. Determinado caso só tenha uma única solução.
• Sistema impossível: São os que não permitem nenhuma solução.
3.3.4 Quanto ao tamanho do sistema
Conforme Gavala (2001), os sistemas de equações lineares podem ser classificados tam-bém quanto a sua dimensão e estará relacionado em conseqüências dos erros de arredondamentodecorrentes das condições:
• Grandes: para n > 300.
• Pequenos: para n≤ 300.
Onde o n será o número de equações existentes no sistema.De acordo com Ferreira (2009), deve-se aplicar os métodos diretos na solução de sis-
temas de equações lineares densos de médio e pequeno porte.

25
• Pequeno: para n < 30.
• Médio: para n < 50.
Onde o n será o número de equações existentes no sistema.
3.4 MÉTODOS DE SOLUÇÃO PARA SISTEMAS DE EQUAÇÕES LINEARES
Os métodos numéricos são utilizados para a resolução de sistemas lineares de váriasclassificações. Atualmente é possível notar que existem diversos métodos numéricos consagra-dos. Segundo Franco (2006), os métodos numéricos são divididos em dois grupos, que são:
1. Métodos Diretos: São denominados de métodos diretos aqueles em que á menos errosde arredondamento, de forma a propiciar a solução exata do sistema linear, caso a soluçãoexista, através de um número finito de operações. .
2. Métodos Iterativos: São aqueles que vão gerar uma seqüência de vetores x(k), a partirde uma solução inicial x(0). Em apropriadas condições, essa seqüência converge para asolução x(∗), caso ela exista.
Segundo Sperandio et al. (2003), para a escolha de um determinado método a ser uti-lizado na resolução de um sistema linear, é importante a observação da propagação do erro nométodo, pois essa propagação causa um acúmulo de erros de arredondamentos ocasionandoresultados ineficientes.
• O erro de arredondamento: não poderá se difundir, ou seja, há equilíbrio numérico dométodo, com relação a sua sensibilidade a acumular algum tipo de erro de arredonda-mento.
• Já a matriz (A): tem que estar de acordo com sua estrutura.
3.5 MÉTODOS DIRETOS OU EXATOS
Para Franco (2006, p. 121), "métodos diretos ou exatos são aqueles que forneceriam a
solução exata, não fossem os erros de arredondamento, com um numero finito de operações".Mas para Sperandio et al. (2003, p. 68), "diz-se que um método é direto quando, ausência de
erros de arredondamento, determina a solução exata do sistema por meio de um número finito
de passos previamente conhecidos".
3.5.1 Retrosubstituição
Esse método tem intuito de encontrar a solução quase que imediata de um sistema deequações lineares quando este já está na forma triangular, através de substituição consecutivasde variáveis.

26
Sistema triangular superior
Para Ruggiero e Lopes (1996) uma matriz A de ordem (nxn) será considerada triangularsuperior se os elementos abaixo da diagonal principal forem nulos. Assim, será representadoda seguinte forma;
A =
a11x1 + a12x2 + ... + a1nxn = b1
a22x2 + ... + a2nxn = b2
...
annxn = bn
(19)
Sistema triangular inferior
A matriz B de ordem (nxn) será considerada triangular inferior se seus elementos acimada diagonal principal forem nulos. Assim será representado da seguinte forma;
B =
a11x1 = b1
a21x1 + a22x2 = b2
...
an1x1 + an2x2 + ... + annxn = bn
(20)
Para que possamos encontrar a solução em um sistema triangular superior será diferentedo inferior nesse caso utilizarmos a retro substituição,ou seja, pois na solução de um sistematriangular superior é obtida por meio de substituição consecutivas de variáveis. Consequente-mente, da ultima equação de A, temos que:
xn =bn
ann(21)
Se fizermos o que foi dito substituirmos o xn na penúltima equação ficara assim:
xn−1 =bn−1−a(n−1,n)xn
a(n−1,n−1)(22)
E usando desta forma gradativamente até obter:
x1 =(b1−a12x2)−a13x3−·· ·−a1nxn
a11(23)
E assim gerando uma equação em sua forma geral representada logo abaixo:
xi =
bi−n∑
j=(i+1)ai jx j
aii, sendo i = 1,2, . . . ,n. j = 1,2, . . . ,n. (24)

27
3.5.2 Método de eliminação de Gauss
Segundo Ruggiero e Lopes (1996), por intermédio do método de eliminação de Gauss épossível encontrar um sistema triangular correspondente ao sistema inicial por meio de ope-rações elementares. Assim é possível a determinação da solução do sistema, já que um sistemadesse tipo possui fácil resolução. De acordo com o supracitado autor essa operação é possívelbaseando-se no seguinte teorema:
Teorema 3.1. Seja S um sistema linear. Aplicando sobre as equações deste sistema ums se-
quência de operações elementares escolhidas entre:
(i). Permutar duas das equações do sistema. Assim sendo o sistema obtido por essa operação
possui a mesma solução do sistema original e vice-versa.
(ii). Multiplicar uma das equações do sistema por um número real diferente de zero. Assim o
sistema obtido possui a mesma solução que o sistema original e vice versa.
(iii). Somar a uma das equações do sistema uma outra equação desse sistema multiplicada
por um número real.
obtemos um novo sistema S1, e os sistemas S e S1 são equivalentes.
Demostração: Ver em Ruggiero e Lopes (1996, p.121).
Ferreira (2009) afirma que esse método é composto de duas etapas distintas, na qual aprimeira é conhecida como a fase de eliminação e a segunda como fase de substituição. Naprimeira fase a de eliminação serão executadas mudanças a respeito das linhas da matriz au-mentada que é representada por [A|b], de modo a resultá-la em um sistema triangular superior.Na segunda fase a de substituição, onde o meio de substituição retroativa, ficará responsávelpor resolver o sistema.
Ainda de acordo com Ruggiero e Lopes (1996), a fase k-ésima vai apoiar-se em apanharcomo elemento pivô o membro da diagonal principal pertencente à coluna a qual se esta traba-lhando, isto é o pivô conseqüentemente será o elemento que vai estar situado sobre os termosque desejamos suprimir. Podemos representá-lo da seguinte condição:
pivô = akk i = k+1, ...,n (25)
De retenção desse elemento, logo as linhas que ficam abaixo necessitará de ter seusrespectivos multiplicadores representados por mik com isso serão calculados de acordo comfórmula abaixo:
mik =aik
akk∀i > k (26)
Depois de determinarmos esses elementos, vamos ter que atualizar cada linha situa-da logo abaixo do elemento pivô, isso através de transformações elementares como mostra aequação a seguir:
28
Li← Li−mik×Lpivô (27)
Onde Lpivô sera a linha a qual o pivo classificado pertence, já o Li vai ser a linha queserá atualizada.
De acordo com Ferreira (2009), esse processo é realizado até que seja obtido um sistematriangular equivalente ao sistema original, dessa forma concluindo a primeira fase do método.Para a determinação da solução do sistema, é aplicado o método de retrosubstituição na matrizencontrada, concluindo a segunda e última fase do método.
3.5.3 Fatoração LU
De acordo com Ferreira (2009), possui várias situações em que é desejado a resoluçãode sistemas lineares que possuam a mesma matriz dos coeficientes porém diferentes vetores b.De acordo com Ruggiero e Lopes (1996) uma das vantagens da aplicação desse método é quepossuindo a mesma matriz A, e alterando apenas os valores do vetor b a resolução do sistema équase que imediata.
Conforme Ferreira (2009) existe varias técnicas de fatoração que são aplicados para seresolver sistemas de equações lineares, porém a fatoração LU possui um maior utilização, poisé por meio dela que a matriz A dos coeficientes é separada de uma única forma em um produtoresultante de duas matrizes, onde serão chamadas de L e de U.
Esses fatores poderão ser alcançados tanto através de uma fórmula para os elementos deLi j e Ui j, ou ainda se utilizarmos a método de eliminação de Gauss.E assim podemos representar ela assim:
A = LU (28)
O teorema que dará suporte a esse método será representado a seguir:
Teorema 3.2. Dada uma matriz quadrada A de ordem n, seja Ak a matriz constituída das
primeiras k linhas e colunas de A. Suponha que det(Ak) = 0 para k = 1,2, ...,(n− 1). Então,
existe uma única matriz triangular inferior L = (mi j), com mii = 1,1≤ i≤ n e uma única matriz
triangular superior U = (ui j) tais que LU = A. Ainda mais, det(A) = u11u22, . . .unn.
Demostração: ver em Ruggiero e Lopes (1996, p.137)
Segundo Sperandio et al. (2003) para obtermos as matrizes L e U, nesse sentido, inicial-mente, mostra-se que existe uma equivalência entre os métodos de decomposição LU com o deeliminação Gaussiana, onde L = [mik], i≥ k,mii = 1 e U = [ak
k j],k≤ j ou seja, sendo as matrizesL e U triangular inferior e superior, simultaneamente. A matriz L são os multiplicadores e osde U são elementos da forma triangular final, ou seja, por eliminação para se obter L, tem quepreservar os mik e o efeito de eliminação. Assim podemos explicitar as matrizes L e U dessamaneira a seguir:

29
Superior:
U =
a(0)11 a(0)12 a(0)13 ... a(0)1n
0 a(1)22 a(1)23 ... a(0)2n
0 0 a(2)33 ... a(0)3n
.
.
.
0 0 0 ... a(n−1)nn
(29)
Inferior:
L =
1 0 0 ... 0m21 1 0 ... 0m31 m32 1 ... 0
.
.
.
mn1 mn2 mn3 ... 1
(30)
Dados os seguintes sistema linear Ax = b e a fatoração LU referente a matriz A vamoster que:
Ax = b ⇐⇒ (LU)x = b (31)
Para Ruggiero e Lopes (2006) a partir dai se denominarmos y = Ux e se substituirmosna equação anterior terão a solução de dois sistemas lineares triangulares, um inferior e outrosuperior representado logo abaixo:
1. Inferior: Ly = b
2. Superior: Ux = y
Tendo em vista que as matrizes L e U são triangulares a solução destes sistemas serápraticamente que imediata ao aplicar o método de retrosubstituição para ambos os casos.
3.5.4 Método de Francis (ou método QR)
Esse método possui estrutura semelhante ao de fatoração LU, sendo que o método QRcaracteriza todos os autovalores de uma dada matriz sem especificar os polinômios característi-cos existentes.

30
Para Franco (2006, p. 236) "seja A uma matriz quadrada de ordem n. O método consiste
em construir uma sequência de matrizes A1,A2, . . . , do seguinte modo: decompomos A = A1,no
produto Q1R1, onde Q1 é ortogonal e R1 é triangular superior".Sperandio et al. (2003, p. 58) define como:"é uma matriz de ordem n em que AT
A = AAT = I, isto é, se A é uma matriz ortogonal, então A(−1) = AT ”. De posse disso temos queA1 =(Q1R1), fazendo a multiplicação dessas duas matrizes na ordem inversa formamos a matrizA2 =R1Q1, em seguida é decomposto a matriz A2 no produto de Q2R2, e assim respectivamente.Com isso temos:
A1 = A = Q1R1 (32)
A2 = R1Q1 = Q2R2 (33)
Ak = Rk−1Qk−1 = QkRk (34)
De acordo com Franco(2006) algumas observações são importantes para a utilização do métodosão elas:
1. Sendo A uma matriz formado pelos coeficientes do sistema, para Franco(2006) para ométodo de QR a matriz A sempre poderá ser decomposta em Q e R;
2. Vai haver uma semelhança entre as matrizes Ak e A. De modo que teremos:
A1 = Q1R1⇒ Q−11 A1 = R1 (35)
A2 = R1Q1 = Q−11 AQ1 (36)
Assim sendo, caso A1 = A, vamos ter que tanto A2 e A vão ser semelhantes também.Podemos representar isso de um modo geral:
Ak+1 = RkQk =Q−1
k Q−1k−1 . . .Q
−11
Q−1 A1Q1 . . .Qk−1Q1
Q(37)
Deste modo, Ak+1 também é similar a A, pois possuem o mesmo polinômio característicoe os autovalores iguais.
3. O referido processo só terminara quando o elemento com maior valor absoluto da matrizAk (situado abaixo da diagonal principal) for menor que ε , que é a precisão pré-fixada.

31
Ainda de acordo com Franco (2006), em toda etapa do método QR, possui a neces-sidade de estabelecer matrizes Qk e Rk onde Rk é a matriz triangular superior e o Qk é a matrizortogonal. A seguir é mostrado com é realizado uma decomposição de uma matriz em QR.
Seja A a matriz que será decomposta em QR, sendo que A é uma matriz formada deacordo com a equação 16, e U uma matriz ortogonal. Para que possamos zerar o elemento a21
vamos ter que fazer a multiplicação entre U1A e, como resultado conseguimos a matriz A(1); jápara zerar o elemento a31, iremos fazer a multiplicação de U2A(1), zerando com isso uma outramatriz A(2), e vamos ter que repetir esse processo até que conseguirmos zera todos os elementossituados abaixo da diagonal principal. Se fizermos a multiplicação entre as matrizes U t
1UT2 isso
nos ira fornecer a matriz Q1 como resultado.Segundo Sperandio et al. (2003),o método de QR deve ser aplicado, para matrizes de
pequeno porte, pois sua aplicação em matrizes de grande porte gera um processo exaustivo queconsome muito tempo de processamento.
3.5.5 Estratégia de pivoteamento
Para Franco (2006) o cálculo da solução de um sistema linear pode acarretar resultadosimprecisos ou indeterminados, pelo fato da ocorrência de elemento pivô zero ou próximo dezero no cálculo dos multiplicadores, esses problemas pode ser corrigido com as estratégias depivoteamento.
Este fato ocorre quando temos que determinar os multiplicadores mik, i > 1 e K ≥ 1 issoreferentes as linhas em que estaremos usando. Com isso o multiplicador referente a cada linha édado da seguinte forma aik
akk,(i > 1), para que isso venha a ocorrer tem que satisfazer a condição
de que akk = 0. Caso ocorra o contrario antes de usar os métodos tem que se utilizar a estratégiade pivoteamento que incide em trocar as linhas ou as colunas da matriz. De acordo com osmultiplicadores de mik teremos que:
mik =aik
akk=
aik
0= @ (38)
Para Ruggiero e Lopes (1996), não é bom trabalhar com um pivô próximo de zero ouquando o pivô for nulo,pois pode conduzir a resultados drasticamente imprecisos. Isso porqueos multiplicadores são bem maiores que os outros elementos do sistema, que por sua vez, oca-siona uma ação dos erros de arredondamentos logo porque os computadores e as calculadorastrabalham com uma aritmética de precisão finita.
"A propagação de erros ocorre principalmente quando multiplicamos um número muito
grande por outro que já contem erro de arredondamento" (FRANCO, 2006 p. 146). Aindade acordo com ele um bom exemplo é que se adotarmos um número determinado z, onde essenúmero tenha um erro de arredondamento ε . O referido número logo pode ser representado daseguinte forma: z = z+ ε . Se realizarmos a multiplicação deste número por um novo elementoj vai ter a seguinte expressão: jz = jz+ jε fazendo com que o erro de arredondamento passe a

32
ser jε . Por isso se j for um número de ordenamento grande, o erro cometido poderá ser maiorque o original.
Ainda com apoio no problema acima Ruggiero e Lopes (1996), e Sperandio et al. (2003)explanam que as referidas estratégias de pivoteamento destina-se garantir a invariabilidade dométodo de eliminação de Gauss, e também do método de fatoração LU, pois para se contornaresses problemas devemos aplicar uma estratégia de pivoteamento, aonde vamos optar por umprocesso de alternativa para linha e/ou coluna, para ser o pivô da realização do elemento devalor absoluto maior. O referido procedimento se realizará por meio de duas estratégias que sãoelas: estratégia de pivoteamento parcial e estratégia de pivoteamento completo.
Estratégia de Pivoteamento Parcial
Para Ruggiero e Lopes (1996) a referida estratégia vai basear-se nos seguintes passos:
1. Apontar-se no começo da etapa K da fase de exclusão , adotar para o pivô o componentede maior módulo entre os coeficientes:a(k−1)
ik , i = k,k+1, . . . ,n;
2. Mudar as linhas k e i se for preciso.
Estratégia de Pivoteamento Completo
Neste método, em que no começo da etapa k é determinado para pivô, o elemento demaior modulo, no meio de todos os elementos que até então agir no procedimento de elimi-nação.
max|a(k−1)i j |= |a(k−1)
rs |=⇒ pivo = a(k−1)rs (39)
Segundo Ruggiero e Lopes (1996) a referida estratégia não é muito utilizada, pois ne-cessita de um esforço computacional maior do que o pivoteamento parcial, pelo fato das muitascomparações realizadas.
3.5.6 Condicionamento de matrizes
Franco (2006) diz que na determinação de sistema de equações lineares faz-se impres-cindível conferir algumas características, como:
1. Conferir se existe ou não solução o sistema;
2. Descobrir alguma forma eficaz para determinar as equações;
3. Constatar se a resolução das equações consistir em muito suscetível a pequenas variaçõesnos coeficientes.

33
Esse fenômeno é conhecido por mal condicionamento que está ligado ao fato da matrizA, formada pelos coeficientes do sistema, está próxima de ser singular, ou seja, o seu determi-nante seja próximo de zero. Será considerado um sistema bem condicionado, aquele que o vetorresído seja próximo do vetor nulo, sendo que o vetor resíduo é determinado pela diferença dasolução exata do sistema e a solução aproximada (FRANCO, 2006).
É possível considerar que essa afirmativa não é verdadeira em algumas situações ondeé identificado tais aspectos que executa mudanças bem pequenas nos componentes do sistema,é durante essas pequenas mudanças que é gerado um vetor resíduo. Desta forma será perigosoestabelecer alguma avaliação sobre a solução de um sistema, a menos que os coeficientes dasmatrizes sejam dados junto com uma certa precisão. Porém não será toda equação mal condi-cionada que vai fornecer resíduo, e sim soluções próximas de equações mal condicionadas quegeram resíduos pequenos (FRANCO, 2006).
Para Arenales e Darezzo (2010, p. 49), "dizemos que um sistema de equações lineares
Ax = b é mal condicionado se pequenas perturbações em alguns de seus coeficientes produzem
bruscas alterações em uma solução".Franco (2006) as conseqüências que essas perturbações causam são vistas quando aplica-
se as determinações de normas de uma matriz, com base nesses conceitos é possível estar aptoa definir as noções de limites de uma seqüência de matrizes, esse conceito será de grande im-portância no que diz respeito à convergência dos métodos interativos de soluções de sistemas deequações lineares, da mesma forma para os problemas de erros de arredondamento ocasionadosnos processos de cálculos onde interfere nas matrizes.
Ainda se considerarmos a condição de um sistema linear não singular Ax = b. Vistoque A é não singular, assim sendo a solução do sistema linear será dada da seguinte forma:x = A(−1)b. Conforme os dados apresentam-se pequenas perturbações e x é o resultado dosistema Ax = b, e logo em seguida análise que haverá uma perturbação pequena no vetor b nafórmula b+ b+ δb, sendo que δ é uma variação pequena no vetor b mais isso se a matriz A
for conhecida e apropriada. Através disso, o resultado de x será da mesma forma perturbada,decorrente a forma x+δx (Franco, 2006). Com isso teremos:
A(x+δx) = b+δb (40)
(x+δx) = A−1(b+δb) (41)
Com base nisso temos que associar δx juntamente com δb, isto é, conhecer como umaperturbação em δx vai afetar numa perturbação em δb. Para isso aplicamos o seguinte artifício:
Ax+Aδx = b+δb =⇒ Aδx = δb, (42)

34
Assim sendo a matriz A não singular, temos,
δx = A−1δb, (43)
porém, utilizando normas consistentes nos dois membros, tem-se,
||δx|| ≤ ||A−1||× ||δb||, (44)
de modo parecido com Ax = b, termos:
||b|| ≤ ||A||× ||x||. (45)
Agora se realizarmos um produto entre as duas ultimas equações membro a membro,vamos ter:
||δx||× ||b|| ≤ ||A||× ||A−1||× ||δb||× ||x||. (46)
Ou ainda,
||δx||||x||
≤ ||A||× ||A−1|| ||δb||||b||
. (47)
Assim sendo, a perturbação em x vai esta associada com a perturbação em b pela cons-tante multiplicativa dada por ||A||× ||A−1||.
Desta maneira estabelecemos o número de condição de A sendo:
cond(A) = ||A||× ||A−1||. (48)
Com isso teremos;
||δx||||x||
≤ cond(A)||δb||||b||
. (49)
Ainda de acordo com Franco (2006, p. 153) "vamos ter que atentar para algumas
observações em relação ao número de condição A, como";
1. Expressamos que cond(A)≥ 1. De fato:
cond(A) = ||A||× ||A−1|| ≥ ||AA−1||= ||I||= 1. (50)
2. ||δb||||b|| pode ser entendido como sendo uma medida do erro relativo em b. já o erro ||δx||
||x||vai depender do valor do número de condição, que será maior ou igual a 1.
3. Caso cond(A) for muito grande, nessa situação pequenas perturbações relativas em b, irãocausar grandes perturbações em x, fazendo com que o problema de resolver Ax = b, sejadado como mal condicionado.
35
4. O cond(A) só será considerado como grande quando valer por volta de 104 ou mais doque esse valor.
3.6 MÉTODO ITERATIVOS
Esse tipo de método consiste em fornecer uma sequências de soluções aproximadas deum sistema onde cada solução é obtida da anterior pela aplicação de um mesmo procedimento,ou seja, repetindo várias vezes e obtendo a cada repetição um valor mais preciso do que oanterior.
De acordo com Franco (2006, p. 168),"[. . . ] um método é iterativo quando fornece uma
sequência de aproximações cada uma das quais obtida das anteriores pela repetição do mesmo
processo".Para que um método venha ser considerado iterativo o mesmo tem que se adequar a
alguns processos e critérios, além disso, fornecer uma série de soluções aproximadas, pois cadauma das quais será obtida das anteriores pela propagação do mesmo tipo de processo.
Ferreira (2009) o referido método tem como idéia principal generalizar o método numéricodo ponto fixo empenhado na busca para encontrar às raízes de funções, isso é repetir um deter-minado processo por varias vezes isso a cada repetição (iteração), uma solução cada vez maisaproximada do que o valor obtido na interação anterior.
Para Sperandio et al. (2003) uma das idéias essenciais do cálculo numérico é a iteraçãoou aproximação sucessiva, pois os métodos iterativos se caracterizar por possuir os seguinteselementos constitutivos abaixo:
1. Estimativa inicial: incide em ter uma estimativa inicial para a solução almejada do pro-blema numérico podendo ser conseguida de diferentes formas dependo do problema es-tudado;
2. Equação de recorrência: é a equação a qual recorremos, partindo-se de uma tentativainicial, onde são executadas as interações ou as estimativas gradativas para a soluçãoalmejada do problema.
3. Teste de parada: é um mecanismo que resultar da precisão desejada e um número Má-ximo de interação, cujo método iterativo é finalizado.
De acordo com Sperandio et al. (2003) declara que os métodos iterativos são compostospelo método de Jacobi, Gauss-Seidel e sobre-relaxação. Mas Franco (2006) delimita os métodositerativos quanto aos seus tipos de procedimentos, relaxação ou estacionário.
Para Franco (2006, p. 168) "um método iterativo é estacionário se cada aproximante
é obtido do anterior sempre pelo mesmo processo". Por isso, iremos expor somente as classesdos métodos iterativos estacionários, sendo que um método estacionário devera ter uma funçãode iteração que não é, alterada durante a operação. Caso mude é dita não estacionário.

36
Franco (2006) fala que caso os processos venham a variar conforme os passos, mas se repetemciclicamente de s em s passos, denominarmos esse processo com sendo s-cíclico. Também seagruparmos os passos em um único passo composto, vamos obter do mesmo modo um métodoestacionário.
3.6.1 Condições de convergência para métodos iterativos
Matriz Diagonalmente Dominante
Teorema 3.3. É condição suficiente para a convergência dos métodos iterativos de Gauss-
Seidel e Gauss-Jacobi que a matriz A(nxn) seja diagonalmente dominante quando os elementos
da diagonal forem maior que o somatório dos outros, ou seja, quando a seguinte condição for
satisifeita.
|aii|>n
∑j=1, j =1
|ai j|, i = 1,2, ...,n (51)
Demostração: ver em Arenales e Darezzo (2010, p.55)
Para Sperandio et al. (2003) podendo ser diagonalmente dominante por linhas e tambémpor colunas. Se considerarmos um sistema linear do tipo Ax = b, caso esse A seja uma matrizdiagonalmente dominante, nesse caso a serie de iterações para os métodos de Gauss-Seidel eGauss-Jacobi vão convergir para a resolução do sistema.
3.6.2 Critérios de parada dos métodos iterativos
De acordo com Franco (2006) os processos que envolvem os métodos iterativos nemsempre possuem garantia de convergência para a solução aproximada do sistema. Fazendo comque isso venha acarretar na repetição do processo por várias vezes de forma infinita. Outroaspecto que devemos atentar é se a solução encontrada já é próximo o suficiente da precisãoadotada. Nesse caso, será necessário utilizar critérios de parada para que possa concluir oprocesso iterativo assim que este convergiu para solução x do sistema, ou ainda com a finalidadede entender quando o processo esta divergindo.
Ainda de acordo com Franco (2006) é possível empregar duas condições de critériosde parada, no primeiro critério relacionado ao número máximo de iterações, pois se o sistemadivergir, não continuará a executar o processo infinitamente.
Para Ruggiero e Lopes (1996) no segundo caso que abarca uma precisão desejada ε clas-sificada, esse processo será repetido até que o vetor d(k+1) fique consideravelmente aproximadodo vetor d(k). A fim de alcançar tal parâmetro avaliamos primeiramente o módulo da distân-cia absoluta máxima por meio dos membros de duas soluções consecutivas,d(k+1) representadapela forma:
d(k+1) = max1≤i≤n
|x(k+1)i − x(k)i | (52)

37
Logo depois realizamos uma divisão a cerca de dk e o máximo valor de d(k+1) dadoem módulo o qual é o máximo da solução atual. De acordo com Ruggiero e Lopes (1996) oresultado obtido dessa divisão, é a distância relativa representada por d(k+1)
r , seu valor deve sermenor que a precisão ε .
d(k+1)r =
d(k+1)
max1≤i≤n
|x(k+1)i |
< ε (53)
3.7 MÉTODO ITERATIVO DE GAUSS-JACOBI
De acordo com Ruggiero e Lopes (1996, p. 155) "e supondo que aii =0, i = 1,2, · · · ,n.
Isolamos o vetor x mediante a separação pela diagonal, assim".
x1 =1
a11(b1−a12x2−a13x3−·· ·−a1nxn)
x2 =1
a22(b2−a21x1−a23x3−·· ·−a2nxn)
...
...xn =
1an−1
(bn−an1x1−an2x2−·· ·−an,n−1xn−1)
(54)
Por conseqüência, tem-se x = Dx+ f com sendo:
D =
0 −a12a11
−a13a11
· · · −a1na11
−a21a22
0 −a23a22
· · · −a2na22
. . . . .
. . . . .
. . . . .−an1ann
an2ann
−an3ann
· · · 0
(55)
f =
b1a11
b2a22
.
.
.
bnann
(56)
O referido método de Gauss-Jacobi vai consistir primeiro em uma tentativa inicial parasolução do sistema linear dado por x(0) para assim obtermos x(1), · · · ,x(k) por meio da relaçãorecursivas x(k+1) = Dx(k)+ f .

38
x(k+1)1 = 1
a11(b1−a12x(k)2 −a13x(k)3 −·· ·−a1nx(k)n )
x(k+1)2 = 1
a22(b2−a21x(k)1 −a23x(k)3 −·· ·−a2nx(k)n )
...
...
x(k+1)n = 1
ann(bn−an1x(k)1 −an2x(k)2 −·· ·−an,n−1x(k)n−1)
(57)
3.8 MÉTODO ITERATIVO DE GAUSS-SEIDEL
Esse método assemelha-se com o método de Gauss-Jacobi onde é utilizado as compo-nentes de x(k). Já no método de Gauss-Seidel é utilizado as componentes de x(k) e as de x(k+1)
com a vantagem de não armazenar os dois vetores fazendo com que venha a convergir maisrápido do que o método de Gauss-Jacobi (SPERANDIO et al.2003).
Esse método também consiste em uma tentativa inicial dado por um x(0), daí calculamosuma série convergente x(1),x(2), · · · ,x(k) caracterizado por:
x(k+1)1 = 1
a11(b1−a12x(k)2 −a13x(k)3 −·· ·−a1nx(k)n )
x(k+1)2 = 1
a22(b2−a21x(k+1)
1 −a23x(k)3 −·· ·−a2nx(k)n )
x(k+1)3 = 1
a33(b3−a31x(k+1)
1 −a32x(k+1)2 −·· ·−a3nx(k)n )
.
.
.
x(k+1)n = 1
ann(bn−an1x(k+1)
1 −an2x(k+1)2 −·· ·−an,n−1x(k)n−1)
(58)
Por conseqüência, no processo de Gauss-Seidel, na etapa de se calcular x(k+1)j , empre-
gamos todos os valores de x(k+1)1 , · · · ,x(k+1)
( j−1) qual já foram calculados e também os valores
restante x(k)( j+1), · · · ,x
(k)n .

39
4 METODOLOGIA, APRESENTAÇÃO E DISCURSSÃO DOS RESULTADOS
4.1 METODOLOGIA
De forma didática e com o objetivo de fazer uma revisão bibliográfica em relação àaplicação das leis de Kirchhoff em circuitos elétricos e posterior solução do SEL (sistema deequação linear), neste trabalho serão analisados circuitos elétricos de mesma arquitetura ondese aplicara as leis de Kirchhoff das malhas e dos nós. Feito isso, será gerado um sistema deequações lineares onde serão usados os métodos numéricos com o objetivo de encontrar as in-tensidades das correntes elétricas que fluem pelos resistores. Todos os métodos aqui usados temcomo objetivo encontrar um vetor solução de um sistema linear com a seguinte representaçãoAx = b, onde A é uma matriz quadrada de ordem n, x e b são matrizes coluna com n linhas. Valesalientar que cada método que será usado possui uma forma diferente de encontrar esse vetor.Seja ele um método direto ou até mesmo iterativo. Não podemos esquecer que cada métodovai possuir uma ótima eficiência e eficácia para ser usado em um problema, e o outro podenão atender essas mesma condições. Sabendo disso é de suma importância executar teste dosmétodos para assim verificar qual terá melhor eficiência e eficácia dos métodos usados e assimcomparar os resultados.
Desta forma como proposta foram criados circuitos com as seguinte arquitetura:
Figura 4: Circuito modelo
Fonte: Autoria Própria (2013)
Com base na arquitetura do circuito elétrico proposto e mostrado na figura acima. Apli-camos as leis de Kirchhoff, e adotando o sentido horário para a corrente elétrica nas sete malhasconsideradas no circuito obtemos as seguintes equações;
−I1R1− I13R13− I14R14 +V = 0−I2R2− I12R12− I15R15 + I13R13 = 0−I3R3− I11R11− I16R16 + I12R12 = 0−I4R4− I10R10− I17R17 + I11R11 = 0−I5R5− I9R9− I18R18 + I10R10 = 0−I6R6− I8R8− I19R19 + I9R9 = 0−I7R7− I20R20 + I8R8 = 0
(59)

40
As equações obtidas através da lei dos nós de kirchhoff são:
I6 = I7 + I8
I5 = I9 + I6
I4 = I10 + I5
I3 = I11 + I4
I2 = I12 + I3
I1 = I13 + I2
I14 = I15 + I13
I15 = I16 + I12
I16 = I17 + I11
I17 = I18 + I10
I18 = I19 + I9
I19 = I20 + I8
I20 = I7
(60)
Para solucionar o sistema de equações composto pelas equações 59 e 60, aplicaremosos métodos diretos de fatoração LU e fatoração QR como também dos métodos iterativos deGauss-Seidel e Gauss-Jacobi.
Os algoritmos utilizados para a resolução do pro-blema, foram escritos utilizando o software Scilab, que segundo Pires (2004) é um tipo deprograma utilizado na resolução de problemas numéricos. Ele é um software aberto para com-putação numérica, pode ser encontrado através de downloads através do site do desenvolvedorpelo endereço http://www.scilab.org/, além de também de outras informações referentes ao soft-ware, como características e manuais das versões. Para a realização desse trabalho utilizamos aversão 5.3.2 do Scilab, para Windows 32 bits.
4.2 PROBLEMAS
4.2.1 Problema 01
Para o primeiro problema utilizamos um circuito com a mesma arquitetura mostrada nafigura 4. Dessa forma, aplicando as leis de Kirchhoff, obtemos o mesmo conjunto de equações59 e 60, cujos valores de resistência e tensão utilizada são os seguinte: R1 = 12Ω, R2 =
15Ω, R3 = 100Ω, R4 = 100Ω, R5 = 100Ω, R6 = 12Ω, R7 = 22Ω, R8 = 100Ω, R9 = 15Ω, R10 =
22Ω, R11 = 100Ω, R12 = 12Ω, R13 = 100Ω, R14 = 12Ω, R15 = 100Ω, R16 = 22Ω, R17 =
22Ω, R18 = 100Ω, R19 = 12Ω, R20 = 100Ω, V = 10V . Com estas equações obtemos umamatriz quadrática de ordem 20.

41
Um sistema de equações composto de 20 equações e 20 incógnitas seria de difícilsolução analítica. Diante de tal dificuldade aplicamos os métodos diretos de fatoração LU efatoração QR, e com isso obtivemos os seguintes resultados mostrados na tabela 1:
Os sistemas compostos pela matriz dos coeficientes, do vetor das variáveis e dos termosindependentes para o problema 01 encontra-se no APÊNDICE A.
Tabela 1: Dados obtidos computacionalmente para o problema 01Método de Fatoração LU Método de Fatoração QR
N Rn(Ω) Ic(A) Ic(A)1 12 1,25672556x10−1 1,25672556x10−1
2 15 5,55793941x10−2 5,55793941x10−2
3 100 5,81643544x10−3 5,81643544x10−3
4 100 2,40411190x10−3 2,40411190x10−3
5 100 2,25444513x10−4 2,25444513x10−4
6 12 3,59924379x10−5 3,59924379x10−5
7 22 1,62128090x10−5 1,62128090x10−5
8 100 1,97796271x10−5 1,97796271x10−5
9 15 1,89452083x10−4 1,89452083x10−4
10 22 2,17866758x10−3 2,17866758x10−3
11 100 3,41232354x10−3 3,41232354x10−3
12 12 4,97629605x10−2 4,97629605x10−2
13 100 6,98878616x10−2 6,98878616x10−2
14 12 1,25467256x10−1 1,25467256x10−1
15 100 5,55793941x10−2 5,55793941x10−2
16 22 5,81643544x10−3 5,81643544x10−3
17 22 2,40411190x10−3 2,40411190x10−3
18 100 2,25444513x10−4 2,25444513x10−4
19 12 3,59924379x10−5 3,59924379x10−5
20 100 1,62128090x10−5 1,62128090x10−5
Fonte: Autoria Própria (2013)
Como podemos ver os valores obtidos pelos métodos descrito acima foram os mesmodevido eles serem semelhantes no que tange encontra o vetor solução.
Com relação aos métodos iterativos de Gauss-Jacobi e Gauss-Seidel não conseguimosencontrar valores para o vetor solução, foi feito o pivoteamento da matriz para que não ouve-seelementos nulos na diagonal principal, além disso foram ainda determinados dois critérios deparada, o primeiro critério foi quanto a distancia relativa utilizou-se uma precisão de ε = 10−3,ε = 10−4 e ε = 10−5 para o problema em estudo. Quanto ao numero de iterações k, para essecritério adotou-se o valor de Kmax = 10000, também foi utilizado um critério de convergênciaque a matriz fosse diagonalmente dominante pois era condição suficiente para que se haja con-vergência para os referidos métodos como a matriz não era digonalmente dominante por issonão se obteve convergência.

42
4.2.2 Problema 02
Seguindo o que foi descrito no problema anterior para a resolução desse proble-ma utilizarmos os mesmos dados do problema anterior com exceção dos valores das resistên-cias que foram modificados como para: R1 = 22Ω, R2 = 12Ω, R3 = 15Ω, R4 = 12Ω, R5 =
22Ω, R6 = 15Ω, R7 = 12Ω, R8 = 15Ω, R9 = 15Ω, R10 = 22Ω, R11 = 15Ω, R12 = 22Ω, R13 =
22Ω, R14 = 22Ω, R15 = 15Ω, R16 = 12Ω, R17 = 12Ω, R18 = 22Ω, R19 = 15Ω, R20 =
12Ω, V = 10V.
Do mesmo modo do problema 01 os sistemas compostos pela matriz dos coeficientes,vetor das variáveis e termos independentes para o problema 02 encontra-se no APÊNDICE B.
Aplicando os métodos diretos igualmente como foi usado no problema anterior obtemosnovos valores para os método de fatoração LU e fatoração QR mostrado logo a seguir:
Tabela 2: Dados obtidos computacionalmente para o problema 02Método de Fatoração LU Método de Fatoração QR
N Rn(Ω) Ic(A) Ic(A))1 22 1,71504650x10−1 1,71504650x10−1
2 12 5,99684800x10−2 5,99684800x10−2
3 15 2,20300000x10−2 2,20300000x10−2
4 12 6,04090000x10−3 6,04090000x10−3
5 22 1,72932000x10−3 1,72932000x10−3
6 15 4,78320000x10−4 4,78320000x10−4
7 12 1,83970000x10−4 1,83970000x10−4
8 15 2,94350000x10−4 2,94350000x10−4
9 15 1,25100000x10−3 1,25100000x10−3
10 22 4,31158000x10−3 4,31158000x10−3
11 15 1,59891000x10−2 1,59891000x10−2
12 22 3,79384800x10−2 3,79384800x10−2
13 22 1,11536160x10−1 1,11536160x10−1
14 22 1,71504650x10−1 1,71504650x10−1
15 15 5,99684800x10−2 5,99684800x10−2
16 12 2,20300000x10−2 2,20300000x10−2
17 12 6,04090000x10−3 6,04090000x10−3
18 22 1,72932000x10−3 1,72932000x10−3
19 15 4,78320000x10−4 4,78320000x10−4
20 12 1,83970000x10−4 1,83970000x10−4
Fonte: Autoria Própria (2013)
Novamente os métodos diteros obtiveram os mesmo valores como pode ser visto natabela acima.
Em relação aos métodos iterativos não conseguimos encontrar valores para o vetorsolução mesmo quando mudamos os valores das resistência foi feito os mesmo procedimen-tos do problema anterior.

43
4.2.3 Medições em circuitos reais
Dois circuitos foram modulados em laboratório com a finalidade de comparar os valo-res obtidos computacionalmente com os valores obtidos através de medidas reais feitas coma utilização de equipamentos contidos no laboratório onde foi realizadas as medidas. Foi uti-lizado um multímetro digital modelo ET-1110 da marca minipa com as seguintes característicasabaixo:
Tabela 3: Escalas Utilizadas para as correntesEscala 200(µA) Escala 2(mA) Escala 20(mA) Escala 200(mA)
Resolução 0,1(µA) 1(µA) 10(µA) 100(µA)Precisão ±1%+2D ±1,5%+2D ±1,5%+2D ±1,5%+2D
Fonte: Manual do fabricante
Tabela 4: Escalas Utilizadas para as tensõesEscala 200(mV ) Escala 2(V ) Escala 20(V )
Resolução 0.1(mV ) 1(mV ) 10(mV )Precisão ±0,5%+2D ±0,5%+2D ±0,5%+2D
Fonte: Manual do fabricante
Tabela 5: Escalas Utilizadas para as resistênciasEscala 200(Ω) Escala 2(KΩ) Escala 20(kΩ) Escala 200(kΩ)
Resolução 0,1(Ω) 1,0(Ω) 10,0(Ω) 100,0(Ω)Precisão ±0,8%+4D ±0,8%+2D ±0,8%+2D ±0,8%+2D
Fonte: Manual do fabricante
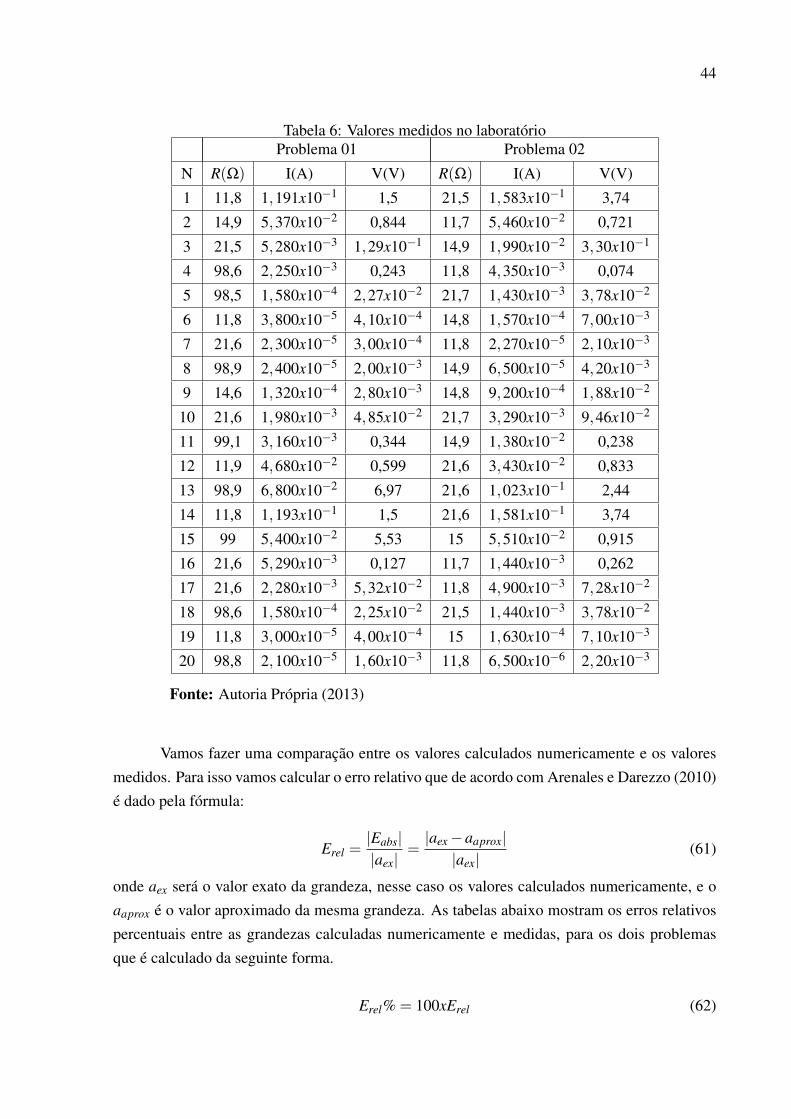
Onde a precisão indica uma porcentagem do valor medido pelo multímetro e um númeroseguido da letra D, que é o número de dígitos. Mais a frente mostraremos como calcular aincerteza associada à medida com base nas informações mostradas nas tabelas acima. As tabelasabaixo mostram os resultados obtidos para as medidas das correntes e tensões em cada resistorpara os dois problemas.
44
Tabela 6: Valores medidos no laboratórioProblema 01 Problema 02
N R(Ω) I(A) V(V) R(Ω) I(A) V(V)
1 11,8 1,191x10−1 1,5 21,5 1,583x10−1 3,74
2 14,9 5,370x10−2 0,844 11,7 5,460x10−2 0,721
3 21,5 5,280x10−3 1,29x10−1 14,9 1,990x10−2 3,30x10−1
4 98,6 2,250x10−3 0,243 11,8 4,350x10−3 0,074
5 98,5 1,580x10−4 2,27x10−2 21,7 1,430x10−3 3,78x10−2
6 11,8 3,800x10−5 4,10x10−4 14,8 1,570x10−4 7,00x10−3
7 21,6 2,300x10−5 3,00x10−4 11,8 2,270x10−5 2,10x10−3
8 98,9 2,400x10−5 2,00x10−3 14,9 6,500x10−5 4,20x10−3
9 14,6 1,320x10−4 2,80x10−3 14,8 9,200x10−4 1,88x10−2
10 21,6 1,980x10−3 4,85x10−2 21,7 3,290x10−3 9,46x10−2
11 99,1 3,160x10−3 0,344 14,9 1,380x10−2 0,238
12 11,9 4,680x10−2 0,599 21,6 3,430x10−2 0,833
13 98,9 6,800x10−2 6,97 21,6 1,023x10−1 2,44
14 11,8 1,193x10−1 1,5 21,6 1,581x10−1 3,74
15 99 5,400x10−2 5,53 15 5,510x10−2 0,915
16 21,6 5,290x10−3 0,127 11,7 1,440x10−3 0,262
17 21,6 2,280x10−3 5,32x10−2 11,8 4,900x10−3 7,28x10−2
18 98,6 1,580x10−4 2,25x10−2 21,5 1,440x10−3 3,78x10−2
19 11,8 3,000x10−5 4,00x10−4 15 1,630x10−4 7,10x10−3
20 98,8 2,100x10−5 1,60x10−3 11,8 6,500x10−6 2,20x10−3
Fonte: Autoria Própria (2013)
Vamos fazer uma comparação entre os valores calculados numericamente e os valoresmedidos. Para isso vamos calcular o erro relativo que de acordo com Arenales e Darezzo (2010)é dado pela fórmula:
Erel =|Eabs||aex|
=|aex−aaprox||aex|
(61)
onde aex será o valor exato da grandeza, nesse caso os valores calculados numericamente, e oaaprox é o valor aproximado da mesma grandeza. As tabelas abaixo mostram os erros relativospercentuais entre as grandezas calculadas numericamente e medidas, para os dois problemasque é calculado da seguinte forma.
Erel% = 100xErel (62)

45
Tabe
la7:
Val
ores
doer
rore
lativ
ope
rcen
tual
dopr
oble
ma
01N
Rn
I(N
umér
ico)
I(V
alor
med
ido)
Err
o re%
V(N
umér
ico)
V(M
edid
o)E
rro r
el%
112
1,25
4672
56x1
0−1
1,19
1x10−
15,
07%
1,50
5607
072
1,5
0,37
%2
155,
5579
3941
x10−
25,
370x
10−
23,
38%
0,83
3669
0911
50,
844
1,24
%3
225,
8164
3544
x10−
35,
280x
10−
39,
22%
0,12
7961
5797
1,29
x10−
10,
73%
410
02,
4041
1190
x10−
32,
250x
10−
36,
41%
0,24
0411
190,
243
1,08
%5
100
2,25
4445
13x1
0−4
1,58
0x10−
429
,92%
0,02
2544
4513
2,27
x10−
20,
69%
612
3,59
9243
79x1
0−5
3,80
0x10−
55,
58%
0,00
0431
9093
4,10
x10−
45,
07%
722
1,62
1280
90x1
0−5
2,30
0x10−
541
,86%
0,00
0356
6818
3,00
x10−
415
,89%
810
01,
9779
6271
x10−
52,
400x
10−
521
,34%
0,00
1977
9627
2,00
x10−
31,
11%
915
1,89
4520
83x1
0−4
1,32
0x10−
430
,33%
0,00
2841
7812
2,80
x10−
31,
47%
1022
2,17
8667
58x1
0−3
1,98
0x10−
39,
12%
0,04
7930
6868
4,85
x10−
21,
19%
1110
03,
4123
2354
x10−
33,
160x
10−
37,
39%
0,34
1232
3540
0,34
40,
81%
1212
4,97
6296
05x1
0−2
4,68
0x10−
25,
95%
0,59
7155
526
0,59
90,
31%
1310
06,
9887
8616
x10−
26,
800x
10−
22,
70%
6,98
8786
1600
6,97
0,27
%14
121,
2546
7256
x10−
11,
193x
10−
14,
92%
1,50
5607
072
1,5
0,37
%15
100
5,55
7939
41x1
0−2
5,40
0x10−
22,
84%
5,55
7939
415,
530,
50%
1622
5,81
6435
44x1
0−3
5,29
0x10−
39,
05%
0,12
7961
5797
0,12
70,
75%
1722
2,40
4111
90x1
0−3
2,28
0x10−
35,
16%
0,05
2890
4618
5,32
x10−
20,
59%
1810
02,
2544
4513
x10−
41,
580x
10−
429
,92%
0,02
2544
4513
2,25
x10−
20,
20%
1912
3,59
9243
79x1
0−5
3,00
0x10−
516
,65%
0,00
0431
9093
4,00
x10−
47,
39%
2010
01,
6212
8090
x10−
52,
100x
10−
529
,53%
0,00
1621
2809
1,60
x10−
31,
31%
Font
e:A
utor
iaPr
ópri
a(2
013)
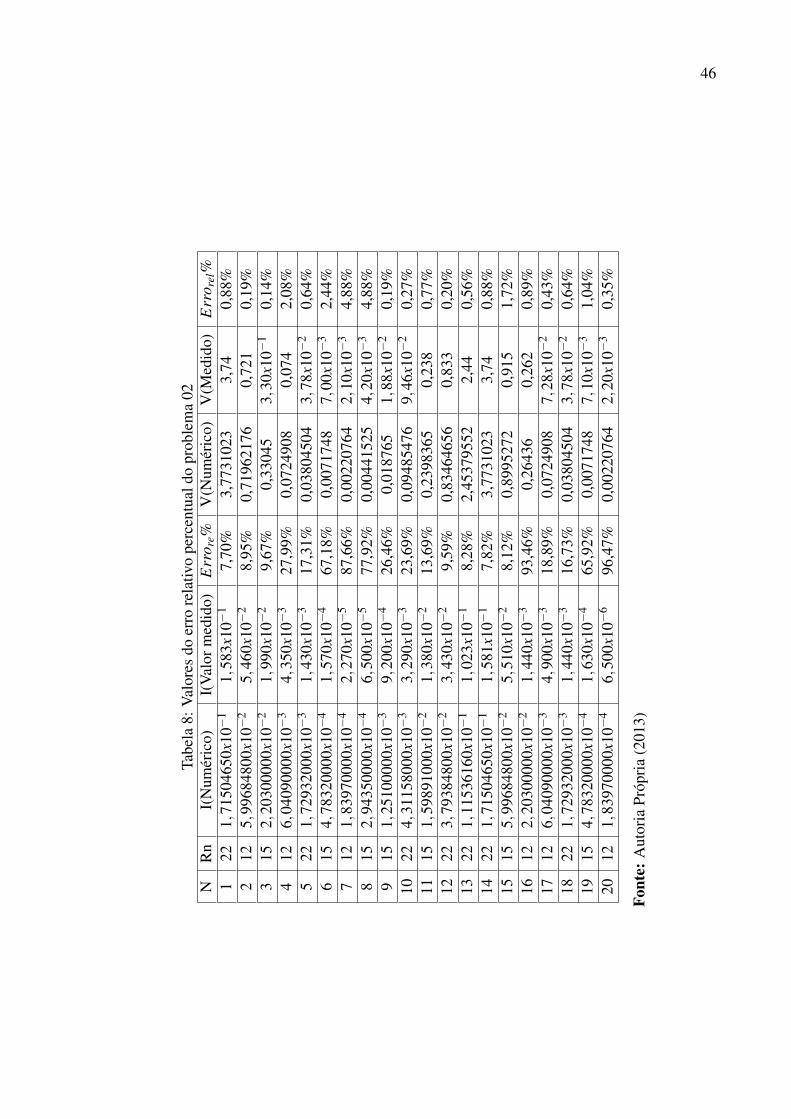
46
Tabe
la8:
Val
ores
doer
rore
lativ
ope
rcen
tual
dopr
oble
ma
02N
Rn
I(N
umér
ico)
I(V
alor
med
ido)
Err
o re%
V(N
umér
ico)
V(M
edid
o)E
rro r
el%
122
1,71
5046
50x1
0−1
1,58
3x10−
17,
70%
3,77
3102
33,
740,
88%
212
5,99
6848
00x1
0−2
5,46
0x10−
28,
95%
0,71
9621
760,
721
0,19
%3
152,
2030
0000
x10−
21,
990x
10−
29,
67%
0,33
045
3,30
x10−
10,
14%
412
6,04
0900
00x1
0−3
4,35
0x10−
327
,99%
0,07
2490
80,
074
2,08
%5
221,
7293
2000
x10−
31,
430x
10−
317
,31%
0,03
8045
043,
78x1
0−2
0,64
%6
154,
7832
0000
x10−
41,
570x
10−
467
,18%
0,00
7174
87,
00x1
0−3
2,44
%7
121,
8397
0000
x10−
42,
270x
10−
587
,66%
0,00
2207
642,
10x1
0−3
4,88
%8
152,
9435
0000
x10−
46,
500x
10−
577
,92%
0,00
4415
254,
20x1
0−3
4,88
%9
151,
2510
0000
x10−
39,
200x
10−
426
,46%
0,01
8765
1,88
x10−
20,
19%
1022
4,31
1580
00x1
0−3
3,29
0x10−
323
,69%
0,09
4854
769,
46x1
0−2
0,27
%11
151,
5989
1000
x10−
21,
380x
10−
213
,69%
0,23
9836
50,
238
0,77
%12
223,
7938
4800
x10−
23,
430x
10−
29,
59%
0,83
4646
560,
833
0,20
%13
221,
1153
6160
x10−
11,
023x
10−
18,
28%
2,45
3795
522,
440,
56%
1422
1,71
5046
50x1
0−1
1,58
1x10−
17,
82%
3,77
3102
33,
740,
88%
1515
5,99
6848
00x1
0−2
5,51
0x10−
28,
12%
0,89
9527
20,
915
1,72
%16
122,
2030
0000
x10−
21,
440x
10−
393
,46%
0,26
436
0,26
20,
89%
1712
6,04
0900
00x1
0−3
4,90
0x10−
318
,89%
0,07
2490
87,
28x1
0−2
0,43
%18
221,
7293
2000
x10−
31,
440x
10−
316
,73%
0,03
8045
043,
78x1
0−2
0,64
%19
154,
7832
0000
x10−
41,
630x
10−
465
,92%
0,00
7174
87,
10x1
0−3
1,04
%20
121,
8397
0000
x10−
46,
500x
10−
696
,47%
0,00
2207
642,
20x1
0−3
0,35
%
Font
e:A
utor
iaPr
ópri
a(2
013)

47
Como pode ser visto o erro relativo percentual nos valores das correntes para os doisproblemas são maiores do que nos valores das tensões. O que significa que os valores das ten-sões possuem uma maior confiabilidade, principalmente nos resistores situados mais afastadosda fonte de energia. Isso se deve ao fato do equipamento de medição não possuir uma boa pre-cisão em relação às medidas de valores de correntes elétricas baixas, nesse caso, da ordem de10−6A. Os dados de precisão de escalas do multímetro digital utilizado mostrados nas tabelas3, 4 e 5 colaboram para esse fato. Por isso optamos por utilizar uma leitura indireta da correnteelétrica em cada resistor, calculada com a lei de Ohm, onde os valores de tensão e resistênciautilizados no cálculo foram medidos.
Toda medida efetuada com a utilização de um equipamento possui uma incerteza as-sociada. Neste trabalho medimos valores de tensão, corrente e resistência elétrica com o auxíliode um multímetro digital. Comumente os fabricantes de multímetros digitais apresentam ascaracterísticas do equipamento de acordo com as tabelas 3, 4 e 5. Com base nisto, Cabral(2004) diz que podemos calcular as incertezas absolutas, ou erros absolutos, das medidas dastensões σV e resistências σR pela relação:
σX =±(% do valor medido)+ (Número de digitos x Resolução) (63)
Onde X é a grandeza a ser medida, e o número de dígitos é o valor seguido da letra Dmostrado nas tabelas 3, 4 e 5. Os erros relativos podem ser calculados pela relação:
σVV
eσRR
(64)
Como os valores de I são obtidos de forma indireta através da lei de Ohm e por setratar de resistores Ôhmicos (resistores que obedecem a 1a Lei de Ohm) podemos dizer quea tensão e a resistência são grandezas dependentes. De acordo com Queiroz Júnior (2000?)conseqüentemente as incertezas absolutas da corrente elétrica, são calculadas pela relação:
σ I =VR
(σVV
+σRR
)(65)
Da mesma forma calculamos o erro relativo pela relação:
σ II
(66)
As tabelas a seguir mostram as incertezas associadas às medidas de resistência, tensãoelétrica e corrente elétrica para cada problema:

48
Tabe
la9:
Val
ores
das
ince
rtez
asda
sm
edid
asno
prob
lem
a01
NR
nR
(med
ido)
σR
V(M
edid
o)σ
VI(
Vm
/Rm
)σ
I1
1211
,80,
4944
1,5
0,00
951,
2711
8644
x10−
10,
0061
3114
215
14,9
0,51
920,
844
0,00
622
5,66
4429
53x1
0−2
0,00
2391
256
322
21,5
0,57
21,
29x1
0−1
0,00
0844
55,
9953
4884
x10−
30,
0001
9878
34
100
98,6
1,18
880,
243
0,00
3215
2,46
4503
04x1
0−3
6,23
205x
10−
5
510
098
,51,
188
2,27
x10−
20,
0003
135
2,30
4568
53x1
0−4
5,96
226x
10−
6
612
11,8
0,49
444,
10x1
0−4
0,00
0202
053,
4745
7627
x10−
51,
8578
7x10−
5
722
21,6
0,57
283,
00x1
0−4
0,00
0201
51,
3888
8889
x10−
59,
6970
2x10−
6
810
098
,91,
1912
2,00
x10−
30,
0002
12,
0222
4469
x10−
52,
3669
3x10−
6
915
14,6
0,51
682,
80x1
0−3
0,00
0214
1,91
7808
22x1
0−4
2,14
46x1
0−5
1022
21,6
0,57
284,
85x1
0−2
0,00
0442
52,
2453
7037
x10−
38,
003x
10−
5
1110
099
,11,
1928
0,34
40,
0037
23,
4712
4117
x10−
37,
9318
8x10−
5
1212
11,9
0,49
520,
599
0,00
4995
5,03
3613
45x1
0−2
0,00
2514
408
1310
098
,91,
1912
6,97
0,05
485
7,04
7522
75x1
0−2
0,00
1403
439
1412
11,8
0,49
441,
50,
0095
1,27
1186
44x1
0−1
0,00
6131
1415
100
991,
192
5,53
0,04
765
5,58
5858
59x1
0−2
0,00
1153
873
1622
21,6
0,57
280,
127
0,00
0835
5,87
9629
63x1
0−3
0,00
0194
576
1722
21,6
0,57
285,
32x1
0−2
0,00
0466
2,46
2962
96x1
0−3
8,68
882x
10−
5
1810
098
,61,
1888
2,25
x10−
20,
0003
125
2,28
1947
26x1
0−4
5,92
067x
10−
6
1912
11,8
0,49
444,
00x1
0−4
0,00
0202
3,38
9830
51x1
0−5
1,85
389x
10−
5
2010
098
,81,
1904
1,60
x10−
30,
0002
081,
6194
3320
x10−
52,
3003
8x10−
6
Font
e:A
utor
iaPr
ópri
a(2
013)
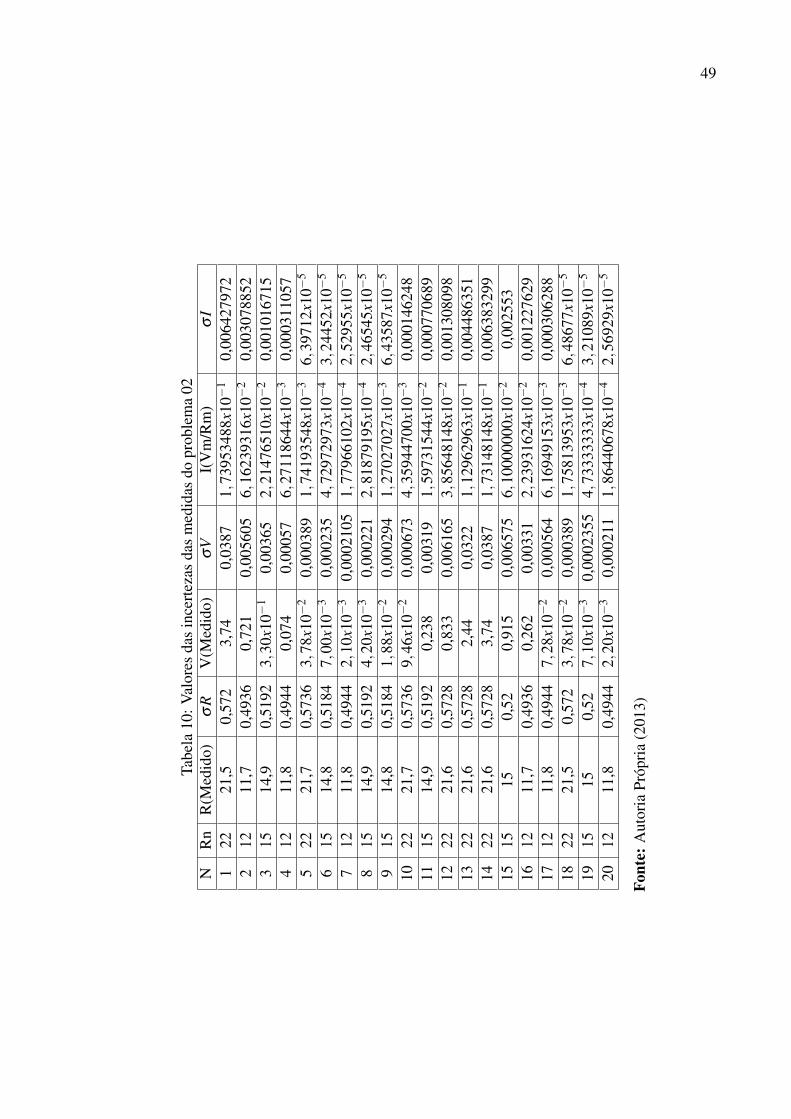
49
Tabe
la10
:Val
ores
das
ince
rtez
asda
sm
edid
asdo
prob
lem
a02
NR
nR
(Med
ido)
σR
V(M
edid
o)σ
VI(
Vm
/Rm
)σ
I1
2221
,50,
572
3,74
0,03
871,
7395
3488
x10−
10,
0064
2797
22
1211
,70,
4936
0,72
10,
0056
056,
1623
9316
x10−
20,
0030
7885
23
1514
,90,
5192
3,30
x10−
10,
0036
52,
2147
6510
x10−
20,
0010
1671
54
1211
,80,
4944
0,07
40,
0005
76,
2711
8644
x10−
30,
0003
1105
75
2221
,70,
5736
3,78
x10−
20,
0003
891,
7419
3548
x10−
36,
3971
2x10−
5
615
14,8
0,51
847 ,
00x1
0−3
0,00
0235
4 ,72
9729
73x1
0−4
3 ,24
452 x
10−
5
712
11,8
0,49
442,
10x1
0−3
0,00
0210
51,
7796
6102
x10−
42,
5295
5x10−
5
815
14,9
0,51
924,
20x1
0−3
0,00
0221
2,81
8791
95x1
0−4
2,46
545x
10−
5
915
14,8
0,51
841,
88x1
0−2
0,00
0294
1,27
0270
27x1
0−3
6,43
587x
10−
5
1022
21,7
0,57
369,
46x1
0−2
0,00
0673
4,35
9447
00x1
0−3
0,00
0146
248
1115
14,9
0,51
920,
238
0,00
319
1,59
7315
44x1
0−2
0,00
0770
689
1222
21,6
0,57
280,
833
0,00
6165
3,85
6481
48x1
0−2
0,00
1308
098
1322
21,6
0,57
282,
440,
0322
1,12
9629
63x1
0−1
0,00
4486
351
1422
21,6
0,57
283,
740,
0387
1,73
1481
48x1
0−1
0,00
6383
299
1515
150,
520,
915
0,00
6575
6,10
0000
00x1
0−2
0,00
2553
1612
11,7
0,49
360,
262
0,00
331
2,23
9316
24x1
0−2
0,00
1227
629
1712
11,8
0,49
447,
28x1
0−2
0,00
0564
6,16
9491
53x1
0−3
0,00
0306
288
1822
21,5
0,57
23,
78x1
0−2
0,00
0389
1,75
8139
53x1
0−3
6,48
677x
10−
5
1915
150,
527,
10x1
0−3
0,00
0235
54,
7333
3333
x10−
43,
2108
9x10−
5
2012
11,8
0,49
442,
20x1
0−3
0,00
0211
1,86
4406
78x1
0−4
2,56
929x
10−
5
Font
e:A
utor
iaPr
ópri
a(2
013)

50
Os gráficos a seguir mostram uma comparação entre a corrente calculada numericamentee a corrente medida indiretamente (calculada com os valores de tensão e resistência medidos nolaboratório) para os dois problemas propostos. Nesta comparação optamos por utilizar o valorda corrente medida indiretamente para normalizar tanto os valores de corrente elétrica, quantobarra de erro. Na prática, o que fizemos é dividir os valores das correntes, tanto a medidaindiretamente como a calculada numericamente, pelo valor da corrente medida indiretamente.O valor do erro, neste caso, é o erro relativo, pois ao dividir o valor do erro absoluto pelo dacorrente medida indiretamente obtemos o erro relativo.
Figura 5: Gráfico problema 01
Fonte: Autoria Própria (2013)
Figura 6: Gráfico problema 02
Fonte: Autoria Própria (2013)

51
Observamos que para os dois problemas propostos os valores das correntes calculadasnumericamente estão dentro das incertezas calculadas para os valores medidos indiretamente.Isso mostra que os dados calculados pelos modelos numéricos estão de acordo com os valoresmedidos em laboratório nos circuitos reais com uma boa aproximação. Também podemos ob-serva que, comparando os dados do problema 01 com o problema 02, que as incertezas dascorrentes medidas indiretamente do problema 01, especialmente aquelas cujos resistores es-tão mais afastados da fonte, são maiores do que no problema 02. Isso se explica por que noproblema 02 foram utilizados resistores de menor valor, o que implica em valores maiores decorrentes medidas, facilitando a leitura do equipamento. Ainda em relação as inceetezas relati-vas, oservamos que no problema 01 a barra de erro relativo nos resistores 7 e 20 não são iguaisapesar da corrente elétrica ser a mesma em ambos os resistores. Isso se explica porque a barrade erro relativa é calculada com os valores de σ I e σR e os resistores 7 e 20 não possuem omesmo valor de resistência. Ainda no problema 01 observamos que a barra de erro relativo dosresistores 6 e 19 são aproximadamente iguais, isso neste caso os resistores 6 e 19 tem o mesmovalor de resistência. O mesmo acontece para os demais resistores que possuem o mesmo valorde corrente elétrica como os pares de resistores 1 e 14, 2 e 15, 3 e 16, 4 e 17, e 5 e 18. Nográfico referente ao problema 02 observamos o mesmo fenômeno.

52
5 CONSIDERAÇÕES FINAIS
Ao final deste trabalho vimos que os métodos iterativos e diretos que foram utilizadospara obter uma solução dos sistemas de equações gerados pela aplicação das leis de Kirchhoffem circuito elétricos vão se diferir em vários aspectos de um para o outro, pois segundo Speran-dio et al. (2003), esses aspectos dizem respeito quanto a convergência, erro de arredondamento,também quanto ao número de iterações e entre outros. No entanto possuem em comum omesmo objetivo que é encontrar o vetor solução que satisfaça as equações em estudo embora osmétodos sejam diferentes.
Apesar de quase sempre os métodos diretos encontrarem a solução do problema se estaexistir, dizemos que eles sempre levam uma pequena vantagem no quis diz respeito aos méto-dos iterativos. Isso por conseguir ser aplicado na resolução de qualquer forma de sistema deequações lineares. Já em relação aos métodos iterativos devemos ter cuidado para que estes obe-deçam uma série de critérios de convergência, pois teremos garantia de convergência se atenderas determinadas condições, por isso se faz necessário que a matriz dos coeficientes atenda essescritérios de convergência daí podemos ter a certeza que o método fornecerá a solução do sis-tema.
Observamos que através dos métodos direto é impossível conseguir a solução do sistemase trabalharmos com o pivô nulo, pois quando trabalhamos com esse pivô próximo de zeroele apresentará problemas envolvendo erros de arredondamentos fazendo com que isso afete asolução final do problema. Em relação aos métodos iterativos esses erros de arredondamentosnão afetaram de uma forma significativa a solução final além de não levar à divergência doprocesso quanto à solução do mesmo, desta forma como também a convergência para outrovetor qual não seja a solução do sistema, considerando que uma vez garantida à convergência éindependente da solução inicial, com isso nos dirigirá para a solução do problema.
Quando se utilizou os métodos diretos de fatoração LU e fatoração QR, com o auxíliode um software computacional, estes conseguiram encontrar os mesmos resultados para o vetorsolução dos problemas que foram propostos, pois de acordo com Ferreira (2009) esses tipos demétodos são geralmente utilizados para se resolver sistemas de pequeno e médio porte além dedensos.
Em relação aos resultados dos experimentos realizados nos laboratórios tanto pra o pro-blema 01 quanto o problema 02 foram observados que os valores encontrados para as correntesnão foram bons, ficando muito discrepantes em relação aos valores obtidos computacional-mente. Isto se explica devido aos equipamentos utilizados nas medidas de correntes elétricas,não possuirem boa precisão. No entanto, quando observamos as medidas de tensão elétricasnotamos que os valores são mais próximos das medidas computacionalmente calculadas, issoestão evidente nas tabelas 9 e 10 além de ser confirmado pelas características do equipamento,mostrados nas tabelas 3, 4 e 5 onde se observa maior precisão nos resultados de tensão elétrica.Por esses motivos achamos melhor descartar os valores de corrente elétrica medidos direta-
53
mente e optamos por utilizar os valores de corrente indireta calculados com os valores para asresistências medidas e para as tensões medidas
Os valores obtidos para o problema 02 os valores medidos foram bem melhores doque os medidos no problema 01, pois os valores das resistências usadas nesse problema forammenor, o que faz com que a corrente que flui pelos resistores mais afastados da fonte sejamaiores que no problema 01. Com isso as medidas tiveram uma boa melhora em relação aooutro problema. Mesmo assim continuamos com o mesmo pensamento de não usar o valoresdas correntes medidos e sim o valores indiretos das correntes, pois esses sim estão dentro dafaixa de erro permitido pelo equipamento utilizado para se realizar as medidas.
Observando os gráficos 5 e 6 comparando as incertezas ou erros do problema 01 e doproblema 02 observamos que a incerteza nas medidas do problema 01 são maiores que a in-certeza relativa no problema 02. Além disso, quando comparamos os resultados calculados nu-mericamente com os medidos indiretamente, também observamos nos gráficos que os valoresde corrente elétrica calculada computacionalmente estão dentro da faixa de incerteza calculadaspara as medidas de corrente nos os dois problemas propostos. Também em relação ao gráficoas barras de erros do problema 01 apresentaram valores diferentes para dois resistores devidoterem valores diferentes de σ I mas a corente que passa nos resistores são a mesma, diferente doproblema dois onde os valores são iguais e por isso há uma simetria em relação aos valores dasresistências.
Por fim, ficou evidenciado que os valores computacionalmente calculados pelos métodosdiretos, já que os iterativos foram inviabilizados pelo fato dos problemas não se encaixaremnos critérios necessários, apresentaram resultados bastante significativos estando dentro dasincertezas experimentais. Desta forma, podemos concluir ser válidas as leis de Kirchhoff tantona análise teórica usado programas computacional quanto numa situação prática real. Além deconfirmar a importância de uma análise numérica computacional de um problema real no qualapresentou resultados mais que satisfatórios.

54
REFERÊNCIAS
ARENALES, Selma; DAREZZO, Arthur.Cálculo Numérico: Aprendizado com apoio de soft-ware.São Paulo: Cengage Learning, 2010.
BURDEN, Richard L; FAIRES, Douglas.Análise Numérica. São Paulo: Cengage, 2008.
CABRAL, Paulo. Erros e incertezas nas medições.2004. Disponível em:<http://www.peb.ufrj.br/cursos/ErrosIncertezas.pdf>. Acesso em: 03 abr. 2013.
FERREIRA, Jose Álvaro Tadeu. Resolução de Sistemas de Equações Lineares Simultâneas:2009. Notas de aula.Disponível em: <http://www.ebah.com.br/content/ABAAABO2cAK/sistemas-lineares>.Acesso em: 05 dez. 2012.
FRANCO, Neide Bertoldi. Cálculo Numérico. São Paulo: Pearson Prentice, 2006.
GAVALA, Francisco Javier Cobos. Cálculo Numérico: Apuntes para el curso de 2001-2002.Disponível em: <www.decom.ufop.br/bob/com400/livros/ap_cal_num_esp.PDF>. Acesso em:25 fev. 2013.
GUSSOW, Milton. Eletricidade Básica. Tradução Aracy Mendes da Costa. São Paulo: Pear-son Makron Books, 1997.
GUSSOW, Milton. Eletricidade Básica. Tradução José Lucimar do Nascimento. 2. ed. PortoAlegre: Bookman, 2009. Coleção Schaum.
HALLIDAY, David.; RESNICK; WALKER, Jearl. Fundamentos da Física.Eletromagnetismo.Tradução e revisão técnica Ronaldo Sérgio de Biasi. 2. ed. Rio de Janeiro: Ltc, 2010. 3 v.
INSTITUTO SUPERIOR DE ENGENHARIA DE PORTO. Lei de Kirchhoff: 2007 Notas deaula. Disponível em: <www.dfi.isep.ipp.pt/uploads/ficheiros/6028.pdf>. Acesso em: 06 dez.12.
LEON, Steven J. Álgebra Linear: com aplicações. Tradução e revisão técnica Sérgio GilbertoTaboada. 8. ed. Rio de Janeiro: LTC, 2011.
LEON, Steven J. Álgebra Linear: com aplicações. Tradução Valéria de Magalhães Iório.4. ed. Rio de Janeiro: LTC, 2008.
LIPSCHUTZ, Seymour. Álgebra Linear. 2. ed. São Paulo: Mcgraw-hill, 1977.
NUSSENZVEIG, Herch Moysés. Curo de física básica. 4. ed. São Paulo: Blucher, 2002.1 v.
NUSSENZVEIG, Herch Moysés. Curo de física básica. 1. ed. São Paulo: Edgard Blucher,1997. 3 v.
55
OLIVEIRA, João Paulo Caraú de. Proposta preliminar de um método interativo híbridopara a resolução de sistemas de equações lineares.2012. 51 f. Monografia (Graduação Ciên-cia e Tecnologia) - Universidade Federal Rural do Semi-árido - UFERSA, Angicos, 2012.
PIRES, Paulo Sérgio da Motta. Introdução ao Scilab versão 3.0: 2004. Notas de aula.Disponível em: <http://www.dca.ufrn.br/ pmotta/sciport-3.0.pdf>. Acesso em: 12 dez. 2012.
QUEIROZ JÚNIOR, Idalmir De Souza.Erros e medidas: Mossoró: UERN,[2000?].DisciplinaFísica instrumental. Mossoró: UERN, [2000?].Disponível em:<http://www2.ufersa.edu.br/portal/view/uploads/setores/159/Erros%20e%20Medidas.doc>.Acesso em: 03 abr. 2013.
RUGGIERO, Márcia A. Gomes; LOPES, Vera Lucia da Rocha.Cálculo Numérico: Aspec-tos teóricos e computacionais. 2. ed. São Paulo: Makron Books, 1996.
SILVA FILHO, Matheus Teodoro da. Fundamentos de eletricidade.Rio de Janeiro: Ltc, 2007.
SPERANDIO, Décio; MENDES, João Teixeira; SILVA, Luiz Henry Monken e.Cálculo Numérico: características matemáticas e computacionais dos métodos numéricos. SãoPaulo: Pearson Prentice Hall, 2003.
NAVY BUREAU OF NAVAL PERSONNEL, TRAINING PUBLICATIONS DIVISION U.S.Curso completo de eletricidade básica. Tradução Cedida pelo centro de instrução AlmiranteWanderkolk. Curitiba: Hemus, 2002.
YOUNG, Hugh D.; FREEDMAN, Roger, A. Física 3: Eletromagnetismo. Tradução SoniaMidori Yamamoto; Revisão técnica Adir Moysés Luiz 12. ed. São Paulo: Pearson, 2009.
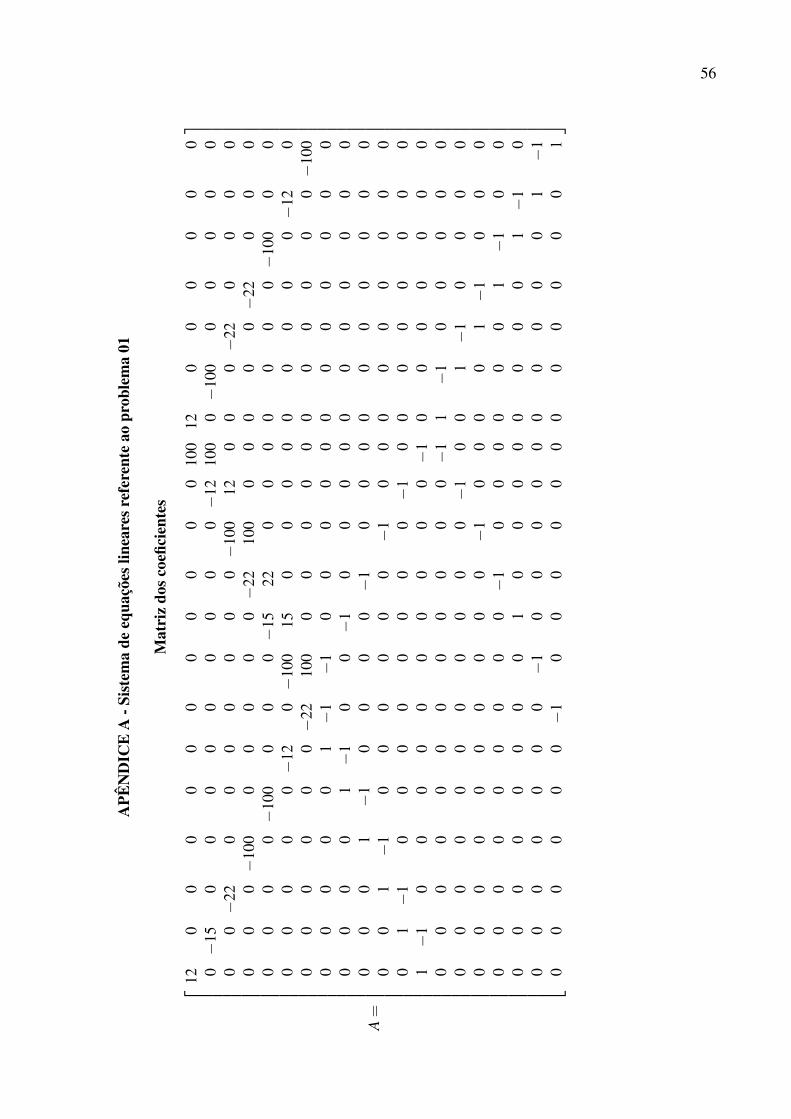
56
APÊ
ND
ICE
A-S
iste
ma
deeq
uaçõ
eslin
eare
sref
eren
teao
prob
lem
a01
Mat
riz
dosc
oefic
ient
es
A=
120
00
00
00
00
00
100
120
00
00
00−
150
00
00
00
00−
1210
00−
100
00
00
00
0−
220
00
00
00−
100
120
00−
220
00
00
00−
100
00
00
0−
2210
00
00
00−
220
00
00
00−
100
00
0−
1522
00
00
00
0−
100
00
00
00
0−
120−
100
150
00
00
00
00−
120
00
00
00−
2210
00
00
00
00
00
00−
100
00
00
01−
1−
10
00
00
00
00
00
00
00
01−
10
0−
10
00
00
00
00
00
00
01
−1
00
00−
10
00
00
00
00
00
01
−1
00
00
00
−1
00
00
00
00
00
1−
10
00
00
00
0−
10
00
00
00
01−
10
00
00
00
00
0−
10
00
00
00
00
00
00
00
00
00−
11
−1
00
00
00
00
00
00
00
00−
10
01−
10
00
00
00
00
00
00
0−
10
00
01−
10
00
00
00
00
00
0−
10
00
00
01
−1
00
00
00
00
00
10
00
00
00
01−
10
00
00
00
0−
10
00
00
00
00
01
−1
00
00
00−
10
00
00
00
00
00
01

57
Vetor das variáveis e vetor dos termos independentes
x =
I1I2I3I4I5I6I7I8I9
I10I11I12I13I14I15I16I17I18I19I20
, b =
100000000000000000000

58
APÊ
ND
ICE
B-S
iste
ma
deeq
uaçõ
eslin
eare
sref
eren
teao
prob
lem
a02
Mat
riz
dosc
oefic
ient
es
A=
220
00
00
00
00
00
2222
00
00
00
0−
120
00
00
00
00−
2222
0−
150
00
00
00−
150
00
00
00−
1522
00
0−
120
00
00
00−
120
00
00−
2215
00
00
0−
120
00
00
00−
220
00−
1522
00
00
00
0−
120
00
00
00−
150−
1515
00
00
00
00
0−
150
00
00
00−
1212
00
00
00
00
00
0−
120
00
00
1−
1−
10
00
00
00
00
00
00
00
01−
10
0−
10
00
00
00
00
00
00
01−
10
00
0−
10
00
00
00
00
00
01−
10
00
00
0−
10
00
00
00
00
01−
10
00
00
00
0−
10
00
00
00
01−
10
00
00
00
00
0−
10
00
00
00
00
00
00
00
00
00−
11−
10
00
00
00
00
00
00
00
0−
10
01−
10
00
00
00
00
00
00
0−
10
00
01−
10
00
00
00
00
00
0−
10
00
00
01−
10
00
00
00
00
01
00
00
00
00
1−
10
00
00
00
0−
10
00
00
00
00
01−
10
00
00
0−
10
00
00
00
00
00
01

59
Vetor das variáveis e vetor dos termos independentes
x =
I1I2I3I4I5I6I7I8I9
I10I11I12I13I14I15I16I17I18I19I20
, b =
100000000000000000000