UNIT-4 Final Ppt

of 70
-
Upload
anandbabugopathoti -
Category
Documents
-
view
220 -
download
0
Transcript of UNIT-4 Final Ppt
-
7/25/2019 UNIT-4 Final Ppt
1/70
Unit-4
IIR & FIR Digital Filters
-
7/25/2019 UNIT-4 Final Ppt
2/70
Filter Filteris a frequency selective network.
Filtersgenerally do not add frequency components to a signal
It oost or attenuate selected frequency regions!eneral types of filters are"
#ractical c$aracteristics
-
7/25/2019 UNIT-4 Final Ppt
3/70
%ypes of Filters
%$ere are two types of filters.
nalog Filters
Digital Filters.
nalog Filter uses passive elements suc$ as resistors' inductors an
d (apacitors. %$ey descri)ed )y t$e Differential equations.
Digital Filter *inear time invariant Discrete time system. Descri)ed
)y t$e difference equations.
+," IIR'FIR
-
7/25/2019 UNIT-4 Final Ppt
4/70
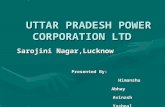
(oncept of nalog *#F
Here input signal is a 5v DC signal. Noise is a high frequency
component. So it is suppressed here. DC Component is a low
frequency component so it is passed here.
-
7/25/2019 UNIT-4 Final Ppt
5/70
(oncept of Digital *#F
-
7/25/2019 UNIT-4 Final Ppt
6/70
Implementation of Digital filters
(an )e implemented in software like c or assem)ly language.
Usually suc$ a languages are compiled and an e,ecuta)le code for
processors is prepared.
Digital filters are also implemented )y a dedicated $ardware contai
ns flip flops' counters' s$ift registers' *U.
ut digital filters wit$ dedicated $ardware can perform one type of
filtering only $ence not possi)le to modify t$em.
-
7/25/2019 UNIT-4 Final Ppt
7/70
(omparison )etween nalog & Digital Filters
Analog Filter Digital FilterAnalog lters wors on analog signals !t operates on the digital samples of
the signals!t is dened "y linear di#erential equations $hese inds of lters are dened
using linear di#erence equations%hile implementing the analog lters in
hardware or software simulation& electrical
components lie resistors& capacitors andinductors are used.
%hile implementing the digital lters
in hardware or software(for
simulation)& we need adders&su"tractors& delays& etc which are
classied under digital logic
components.$he frequency response is modied "y
changing the components.
$he frequency response is modied
"y changing the lter coe*cients.+aplace transform is used for the analysis of
analog lter.
, transforms are used for the anaysis
of digital lters-or sta"ility and causality& the poles should
lie on the left half of splane.
!n order to "e sta"le and causal& the
poles of the transfer function should
lie inside the unit circle in /plane.
http://amitbiswal.blogspot.com/2012/02/reason-why-transformers-are-rated-in.htmlhttp://amitbiswal.blogspot.com/2011/08/most-popular-open-source-softwares-list.htmlhttp://amitbiswal.blogspot.com/2011/08/most-popular-open-source-softwares-list.htmlhttp://amitbiswal.blogspot.com/2012/02/reason-why-transformers-are-rated-in.html -
7/25/2019 UNIT-4 Final Ppt
8/70
dvantages of Digital Filters. Digital filter performance is not influenced )y component ageing' temperat
ure & power supply variations.
digital filter is $ig$ly immune to noise & possess considera)le parameter
sta)ility.
Digital filters afford a wide variety of s$apes for amplitude & p$ase respons
es.
/o pro)lems of i0p 'o0p impedance matc$ing.
1perated over a wide range of frequencies.
%$e coefficients of digital filters can )e c$anged at any time to o)tain desir
ed response.
2ultiple filtering is possi)le only in digital filters.
-
7/25/2019 UNIT-4 Final Ppt
9/70
Disadvantages of Digital Filters.
%$ere are few disadvantages also. 3uantiation error occurs due to finite word lengt$ in t$e represe
ntation of signals and parameters.
Digital filters also suffer from andwidt$ pro)lems.
-
7/25/2019 UNIT-4 Final Ppt
10/70
Infinite Impulse Response5IIR6 Digital Filter
In IIR Digital Filter' present o0p samples depends upon present i0p' past i0p also o
n past o0p.
IIR filter is a recursive filter.
/t$ order Difference equation is given )y
*et a7 8-7 and )9 8 a9 87 wit$ k87 wit$ remaining coefficients as eros' t$e a)ove eq
uation )ecomes
y5n68y5n-76:,5n6
-
7/25/2019 UNIT-4 Final Ppt
11/70
pply ;-%ransform we get
Its inverse ;-%ransform is $5n68u5n6
It indicates t$at t$e impulse response of IIR filter is $aving infi
nite duration.
%$e %.F of IIR filter is
Design of IIR filter for given specifications is to find t$e filter co
efficients
-
7/25/2019 UNIT-4 Final Ppt
12/70
Design of Digital filter from nalog Filter
-
7/25/2019 UNIT-4 Final Ppt
13/70
nalog *#F into Digital *#F
-
7/25/2019 UNIT-4 Final Ppt
14/70
& alog Filter Desig
%$e most general form of a alog tra sfer fu ctio is
. ($e)ys$ev filter &ppro,imatio
-
7/25/2019 UNIT-4 Final Ppt
15/70
utterwort$ filter
%$e utterwort$ filteris a type of signal processing filter designed
to $ave as flat aAfreque cy respo seas possi)le i t$eApass)a d.
It is also referred to as a ma,imally flat mag itude filter.
It was first descri)ed in 7B?9 )y t$e ritis$ engineer and p$ysicist =t
ep$e utterwort$in $is paper entitled C1 t$e %$eory of Filter
&mplifiersC
-
7/25/2019 UNIT-4 Final Ppt
16/70
& alog *ow pass5*#F6 utterwort$ filt
er
*owpass utterwort$ filters are all-pole filters c$aracteried )y
t$e magnitude response given )y
or
...........
576
N
p
N
c
jH2
2
2
2
1
1
1
1|)(|
+
=
+
=
N
c
jH2
1
1|)(|
+
=
passbandallowablespecifyingparameter
frequencyPassbandp
frequencycutofforfrequencydB
frequency
filtertheoforderN
c
=
===
==
3
,....3,2,1
-
7/25/2019 UNIT-4 Final Ppt
17/70
& alog *ow pass5*#F6 utterwo rt$ f i l ter
%$is mag itude respo se is mo oto ically decreasi g fu ctio
w$ere ma,imum respo se is unity at 89 as s$own in )elow
-
7/25/2019 UNIT-4 Final Ppt
18/70
& alog *ow pass5*#F6 utterwo rt$ f i l ter
%$e response )ecomes ideal as t$e order / is increases.
%$e 2agnitude response equation576 )ecomes
#ut in a)ove equation 5>6 we get
int3707.0;
)(;
1)(;
podBaiswhichthroughpassediscurvethe
rapidlydecreasesjH
jHfor
c
c
c
=
>
=
-
7/25/2019 UNIT-4 Final Ppt
19/70
& alog *ow pass5*#F6 utterwo rt$ f i l ter
( )( )
......(3)1
1
2
2
Ns
jH+
=
( ) )4.(..........01 2 =+ Ns
0quating denominator equal to /ero in equation(1) we get
roots
Nkes
areequationofrootsthenow
es
becomesequationthenoddisNfor
Nkj
k
kjN
2,...3,2,1;
)4(
1
)4(
2/2
22
==
==
-
7/25/2019 UNIT-4 Final Ppt
20/70
& alog *ow pass5*#F6 utterwo rt$ f i l ter
Nkes
areequationthisofrootsthenow
es
becomesequationthenevenisNfor
Nkj
k
kjN
2,...3,2,1;
1
)4(
2/)12(
)12(2
==
==
!f N21 we get the following roots
-
7/25/2019 UNIT-4 Final Ppt
21/70
& alog *ow pass5*#F6 utterwo rt$ f i l ter
3oles on left half of splane gives sta"ility. 3oles which are
left in splane are
-
7/25/2019 UNIT-4 Final Ppt
22/70
& alog *ow pass5*#F6 utterwo rt$ f i l ter
%$erefore /8? rd order utterwort$ *owpass filte %ransfer functio
n at
is given )y
$his is the denominator polynomial of $ransfer function H(s)
sec/1radc=
-
7/25/2019 UNIT-4 Final Ppt
23/70
& alog *ow pass5*#F6 utterwo rt$ f i l ter
%$e poles w$ic$ are present only in left $alf of s-plane can )e calc
ulated using.
%$e poles given )y a)ove equation5E6 are /ormalied poles )ecau
se t$ey are calculated at
=o unnormalied poles are given )y %$e transfer function of suc$ a u ormali4ed utterwort$ filter
can )e o)tained )y su)stituting
NkN
k
where
es
k
j
kk
,...3,2,1;2
)12(
2
)5.........(
=
+=
=
sec/1radc=
kck ss .| =
c
ss
=
-
7/25/2019 UNIT-4 Final Ppt
24/70
1rder of t$e utterwort$ filter
5/6
ss
pp
frequencystopbandatnattenuatiostopbandthebelet
frequencypassbandatnattenuatiopassbandthebelet
.max
.max
-
7/25/2019 UNIT-4 Final Ppt
25/70
1rder of t$e utterwort$ filter5/6Consider )1.........(
1
1|)(|
2
2
2
N
p
jH
+
=
+
=N
p
jH
getweeqnofsidesbothonarithmtake
2
2
2
1
1log10|)(|log10
)1(log
)1log(10)1log(10|)(|log20
2
2
N
p
jH
+=
)2)........(1log(10|)(|log20
2
2
N
p
jH
+=
.|)(|log20 nattenuatiocalledisjHhere
-
7/25/2019 UNIT-4 Final Ppt
26/70
1rder of t$e utterwort$ filter5/6
)3...(..........)110(
110
10)1(
1.0)1log(
)1log(10
)1log(10
)1log(10|)(|log20
)2(
2/11.0
1.02
1.02
2
2
2
2
2
2
=
==+
=+
=+
=
+
=
+=
=
p
p
p
p
p
p
N
p
p
p
N
p
p
pp
jH
becomeseqnwhen
-
7/25/2019 UNIT-4 Final Ppt
27/70
1rder of t$e utterwort$ filter5/6
110
110110
110
10)1(
1.0)1log(
)1log(10
)1log(10
)1log(10|)(|log20
)2(
1.0
1.0
2
1.02
1.0
2
2
1.0
2
2
2
2
2
2
2
2
2
2
=
=
=
=
+
=
+
=
+
=
+
=
+=
=
p
ss
s
s
N
p
s
N
p
s
N
p
s
s
N
p
s
s
N
p
s
s
N
p
s
s
N
p
s
ss
jH
becomeseqnwhen
N
-
7/25/2019 UNIT-4 Final Ppt
28/70
1rder of t$e utterwort$ filter5/6
=
=
=
=
p
s
p
s
p
s
N
p
s
N
p
s
p
s
p
s
p
s
p
s
p
s
N
aswrittenbecaneqnthereforeegerresultsnotdoesequationThis
filtertheofordertheisthisN
N
eqntosidesbothonarithmtake
log
110
110log
)5(int
)5...(....................
log
110
110log
110
110loglog
110110loglog
)4(log
)4......(..........110
110
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
-
7/25/2019 UNIT-4 Final Ppt
29/70
1rder of t$e utterwort$ filter5/6
110,110
log
log
log
110
110log
1.01.0
1.0
1.0
==
ps
p
s
whereN
or
NisfilterhButterworttheoforderso
p
s
p
s
( )
=
==
A
bygivenisandparameteraisAratiotransitioncallediskwhere
k
AN
aswrittenbealsocanrder
s
p,
1log
log
-
7/25/2019 UNIT-4 Final Ppt
30/70
( ) ( )1 1
0.1 0.12 210 110 1p s
p sc
N N
= =
3rove that
3roof4
( )
( ) )1..(..........
110
110
110
11
11
1
1
1
1|)(|
2/11.0
2/11.0
1.02
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
cNp
N
c
p
N
c
p
N
c
p
N
p
N
c
N
p
N
c
N
p
N
c
N
p
N
c
p
p
p
getwecomparingbyjHconsider
=
=
==
=
=
=
+=
+
+
=
+
=
-
7/25/2019 UNIT-4 Final Ppt
31/70
( )
( )
( )writecanweandfrom
!onsider
s
p
s
p
p
s
p
s
p
p
s
p
s
sc
NN
cs
N
ps
NN
c
N
ps
N
p
s
)2()1(
)2........(..........110
110
110110
110
110
110110110
110110
110
110
2/11.0
2/1
1.0
1.02/11.0
2/1
1.0
1.0
2/1
1.0
1.02/1
1.0
2/1
1.0
1.0
1.0
1.02
=
=
=
= =
=
( ) ( )1 1
0.1 0.12 210 110 1p s
p sc
N N
= =
-
7/25/2019 UNIT-4 Final Ppt
32/70
FIR Filter Design ased on 2:7 w$ose D%F%
appro,imates t$e desired D%F% In s
ome sense.one commonly used appro,imation criterion is to mini
mie t$e integral-squared error.
)(eh j
d
{ }][nht)(eH
j
t
-
7/25/2019 UNIT-4 Final Ppt
33/70
FIR Filter Design ased on
-
7/25/2019 UNIT-4 Final Ppt
34/70
FIR Filter Design ased on
-
7/25/2019 UNIT-4 Final Ppt
35/70
FIR Filter Design ased on
-
7/25/2019 UNIT-4 Final Ppt
36/70
FIR Filter Design ased on
-
7/25/2019 UNIT-4 Final Ppt
37/70
FIR Filter Design ased on
-
7/25/2019 UNIT-4 Final Ppt
38/70
FIR Filter Design ased on
-
7/25/2019 UNIT-4 Final Ppt
39/70
FIR Filter Design ased on 6t$e rectangular window $as an a)rupt transit
ion to ero.
=otherwise
"nn
$,0
0,1][
-
7/25/2019 UNIT-4 Final Ppt
40/70
FIR Filter Design ased on 6providing a smoot$ transition from t$e pass)and to t$e stop)and.
-
7/25/2019 UNIT-4 Final Ppt
41/70
FIR Filter Design ased on
-
7/25/2019 UNIT-4 Final Ppt
42/70
FIR Filter Design ased on
-
7/25/2019 UNIT-4 Final Ppt
43/70
FIR Filter Design ased on 6get
5?6determine t$e cutoff frequency )y setting"
5462 is estimated using 't$e value of t$e constant c is o)tain fromta)le given.
[ ] ][][ nwnnh hd =
2/)( spc +=
"
c
-
7/25/2019 UNIT-4 Final Ppt
44/70
FIR Filter Design ased on
-
7/25/2019 UNIT-4 Final Ppt
45/70
FIR Filter Design ased on
-
7/25/2019 UNIT-4 Final Ppt
46/70
(omputer-ided Design of Digital Filter
%wo specific design approac$es )ased in iterative potimiation tec$niques.
%$e aim is to determine iteratively t$e coefficients of t$e digital transfer function so t$at t$e difference )etween and
for all value of over closed su
)intervals of is minimied 'andusually t$e difference is specified as a weig$ted error function given )y"
)(ej
H
)(ej
&
0
)([ ])()()()( eee
jjj&H'
=
( t id d D i f Di it
-
7/25/2019 UNIT-4 Final Ppt
47/70
(omputer-ided Design of Digital Filter
($e)ys$ev criterion
--to minimie t$e peak a)solute value of t$eweig$ted error
*east-p criterion
--to minimie t$e integral of pt$ power of t$e weig$ted error function
)(
)(max $=
)(
{ } =
=(
i
p
e&e' ijij
1
)()(
( t id d D i f Di it
-
7/25/2019 UNIT-4 Final Ppt
48/70
(omputer-ided Design of Digital Filter
Design of +quiripple *inear-#$ase FIR Filter
%$e frequency response of a linear-p$ase FIR filter is"
%$e weig$ted error function in t$is case involves t$e amplitude response and is given)y
)()( 2/
= HHeee
jjNj
=
)()()()( &H'
( t id d D i f Di it
-
7/25/2019 UNIT-4 Final Ppt
49/70
(omputer-ided Design of Digital Filter
%ype 7 linear-p$ase FIR filter
%$e amplitude response is "
It can )e rewrite using t$e notation
in t$e form
-
7/25/2019 UNIT-4 Final Ppt
50/70
(omputer-ided Design of Digital Filter
%ype > linear-p$ase FIR filter
%$e amplitude response is "
It can )e rewrite in t$e form"
-
7/25/2019 UNIT-4 Final Ppt
51/70
(omputer-ided Design of Digital Filter
%ype ? linear-p$ase FIR filter
%$e amplitude response is "
It can )e rewrite in t$e form"
)sin(22)(
2/
1 nn
N
hH
N
n =
=
)cos()(sin
)sin(][)(
1
0
0
kkc
kkcH
"
k
"
k
=
=
=
=
( t id d D i f Di it
-
7/25/2019 UNIT-4 Final Ppt
52/70
(omputer-ided Design of Digital Filter
%ype 4 linear-p$ase FIR filter
%$e amplitude response is "
It can )e rewrite in t$e form"
))2
1(sin(]
2
1[2)(
2/)1(
1
+
= +
=
nnNhH
N
n
)cos(][)2
sin(
)2
1(sin][)(
2/)12(
0
2/)12(
1
kkd
kkdH
"
k
"
k
=
+
=
=
=
(omp ter ided Design of Digit
-
7/25/2019 UNIT-4 Final Ppt
53/70
(omputer-ided Design of Digital Filter
%$e amplitude response for all four typesof linear-p$ase FIR filters can )e e,pressed in t$e form
%$en t$e we modify t$e form of t$e weig$t appro,imation function as"
)()()( A)H =
[ ]
=
=
)()()()()(
)()()()()(
w)&A)'
&A)'
(omputer ided Design of Digit
-
7/25/2019 UNIT-4 Final Ppt
54/70
(omputer-ided Design of Digital Filter
Using t$e notions and
we can rewrite it as"
%$en we determine t$e coefficientsto minimie t$e peak a)solute value of t$e weig$ted appro,imation error over t$e specified frequency )ands
)()()( )'' =
)(/)()( )&& =
=
)()()()( &A'
][ka
$
(omputer ided Design of Digit
-
7/25/2019 UNIT-4 Final Ppt
55/70
(omputer-ided Design of Digital Filter
lternation %$eorem
%$e amplitude function is t$e )est unique apro,imation of t$e desired amplitud
e response o)tained )y minimiing t$e peak a)solute valu
of if and only if t$ere e,ist at least
e,tremal angular frequencies''in a closed su)set R of t$e frequency ran
ge
)(A
)( 2+# 110 ,, + #
0 110 +
-
7/25/2019 UNIT-4 Final Ppt
56/70
Digital Filter Design Using 2atla)
IIR Digital Filter Design Using 2atla)
=teps"576determine t$e filter order / and t$e frequency scaling factor
-
7/25/2019 UNIT-4 Final Ppt
57/70
Digital Filter Design Using 2atla)
5>6determine t$e coefficients of t$e transfer function.
J)'aK8)utter5/'5/'Rs'
-
7/25/2019 UNIT-4 Final Ppt
58/70
Digital Filter Design Using 2atla)
FIR Digital Filter Design Using 2atla)
=teps576.estimate t$e filter order from t$egiven specification.
reme4ord'kaiserord
5>6determine t$e coefficient of t$e transfer function using t$e estimated order and t$e filter specification.
reme
Digital Filter Design Using 2atla
-
7/25/2019 UNIT-4 Final Ppt
59/70
Digital Filter Design Using 2atla)
FIR Digital Filter 1rder +stimation Using
2atla)
J/'fpts'mag'wtK8remeord5fedge'mval'dev6
J/'fpts'mag'wtK8remeord5fedge'mval'dev'F%6
For FIR filter design using t$e aiser window't$e window order s$ould )e estimatedusing kaiserord
J/'
-
7/25/2019 UNIT-4 Final Ppt
60/70
Digital Filter Design Using 2atla)
+quiripple *inear-p$ase FIR Design Using2atla)
--emplying t$e #arks-2c(lellan algorit$m.
)8reme5/'fpts'mag6
)8reme5/'fpts'mag'wt6
)8reme5/'fpts'mag'ftype6
)8reme5/'fpts'mag'wt'ftype6
Digital Filter Design Using 2atla
-
7/25/2019 UNIT-4 Final Ppt
61/70
Digital Filter Design Using 2atla)
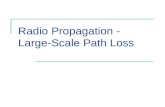
FIR equiripple lowpass filter of +,ample L.>L for /8>M
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-200
-150
-100
-50
0
50
\omega/pi\
Gain,dB
Digital Filter Design Using 2atla
-
7/25/2019 UNIT-4 Final Ppt
62/70
Digital Filter Design Using 2atla)
!ain response of t$e FIR equiripple )andpass filter of +,ample L.>M.
Digital Filter Design Using 2atla
-
7/25/2019 UNIT-4 Final Ppt
63/70
Digital Filter Design Using 2atla)
-
7/25/2019 UNIT-4 Final Ppt
64/70
Digital Filter Design Using 2atla)
-
7/25/2019 UNIT-4 Final Ppt
65/70
Digital Filter Design Using 2atla)
Filter Designfir7 is used to design conventional lowpass'$ig$pass' )andpass')andstop and multi)and FIR filter.
)8fir75/'
-
7/25/2019 UNIT-4 Final Ppt
66/70
Digital Filter Design Using 2atla)
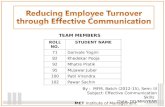
e,ample of a conventional lowpass FIR filter
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-300
-250
-200
-150
-100
-50
0
50
\omega/pi\
Gain,dB
Digital Filter Design Using 2atla
-
7/25/2019 UNIT-4 Final Ppt
67/70
Digital Filter Design Using 2atla)
Filter Design
fir>is employed to design FIR filters wit$ ar)itarily s$aped magnitude response.
)8fir>5/'f'm6
)8fir>5/'f'm'window6
)8fir>5/'f'm'npt6
)8fir>5/'f'm'npt'window6
)8fir>5/'f'm'npt'lap'window6
Digital Filter Design Using 2atla
-
7/25/2019 UNIT-4 Final Ppt
68/70
Digital Filter Design Using 2atla)
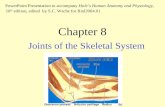
+,amples of multilevel filter
--2agnitude response of t$e multilevel filter designed wit$ fir>
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
/pi
magnitude
Digital Filter Design Using 2atla
-
7/25/2019 UNIT-4 Final Ppt
69/70
Digital Filter Design Using 2atla)
*east-squares +rror FIR Filter Design Using 2atla)
firlsto design any type of multi)and linea
r-p$ase FIR filter )ased on t$e least-squares met$od
)8firls5/'fpts'mag6
)8firls5/'fpts'mag'wt6
)8firls5/'fpts'mag'ftype6
)8firls5/'fpts'mag'wt'ftype6
Digital Filter Design Using 2atla
-
7/25/2019 UNIT-4 Final Ppt
70/70
Digital Filter Design Using 2atla)
e,ample of t$e linear-p$ase FIR lowpass filter
--!ain response of t$e linear-p$ase FIR low
pass filter
-160
-140
-120
-100
-80
-60
-40
-20
0
20
gain,dB