Telecommunications - Digital Modulation (PCM / DPCM / Delta ...

J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February 49
By Joshua D. Reiss, AES Member
INTRODUCTIONSigma–delta modulation (SDM) is per-haps best understood by comparisonwith traditional pulse-code modulation(PCM). A PCM converter typicallysamples an input signal at the Nyquistfrequency and produces an N-bit repre-sentation of the original signal. Thistechnique, however, requires quantiza-tion to 2N levels. Whether implementedusing successive approximation regis-ters, pipelined converters, or other tech-niques, high resolution is difficult toobtain in PCM conversion due to theneed to accurately represent many quan-tization levels and the subsequent circuitcomplexity. This is the motivation forsigma–delta modulation, a form ofpulse-density modulation, whichexploits oversampling and sophisticatedfilter design in order to employ a low-bitquantizer with high effective resolution.
In this tutorial, we will considercommon designs of sigma–deltamodulators as used for analog-to-digi-tal conversion. The basic principle isthe same for SDMs employed in D/Aor sample-rate conversion. We willrestrict the analysis to asynchronous,discrete-time designs. However, theseare by far the most common designsand include most feedforward, feed-back, and multistage implementations.We will explain the theory of opera-tion, emphasizing signal-to-noise ratioestimation and comparison with PCMconversion. We will also introduce thelinear model, which assists in under-standing filter design and noise shap-
ing principles. Since sigma–deltamodulation is highly nonlinear, thereare various phenomena that cannot beexplained using this technique, such asinstability and limit cycles. The litera-ture on these phenomena can beconfusing, so we attempt to give aclear definition of the terms and clarifythe current state of understanding.Finally, we introduce several state-of-the-art techniques that can be used todeal with these unwanted phenomena.
THE LINEAR MODEL ANDPULSE-CODE MODULATIONThe theory of quantization is well-established (see [1] and referencestherein). The allowed values in the
output signal, after quantization, arecalled quantization levels, whereas thedistance between two successive levels, is called the quantization stepsize, q. For a quantizer with b bitscovering the range from +1 to -1, thereare 2b quantization levels, and thewidth of each quantization step is
(1)
This is depicted in Fig. 1 for a 3-bitquantizer.
The rounding, or midriser, quantizerassigns each input sample x(n) to thenearest quantization level. The quanti-zation error is simply the differencebetween the input and output to the
q b=2 2 1/ ( - )
➥
UNDERSTANDING SIGMA–DELTAMODULATION:
The Solved and Unsolved Issues
Fig. 1. Transfer characteristics for a 3-bit quantizer and V=1
Sigma–delta modulation is the most popular form of analog-to-digital conversion used in audio applica-tions. It is also commonly used in D/A converters, sample-rate converters, and digital power amplifiers.In this tutorial the theory behind the operation of sigma–delta modulation is introduced and explained.We explain how performance is assessed and resolve some discrepancies between theoretical and experi-mental results. We discuss the issues of usage, such as limit cycles, idle tones, harmonic distortion, noisemodulation, dead zones, and stability. We characterize the current state of knowledge concerning theseissues and look at what are the most significant problems that still need to be resolved. Finally, practicalexamples are given to illustrate the concepts presented.
SDM_Reiss.qxd 2/6/08 10:41 AM Page 1

50 J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February
quantizer, eq=Q(x)-x. It can easily beseen that the quantization error eq(n) isalways bounded by
(2)
Since quantization is a highlynonlinear process, the exact effect ofquantization on the signal content andthe nature of quantization noise may bedifficult to measure. For this reason,several assumptions are often made.1. The error sequence, eq(n), is a sta-
tionary, random process.2. The error sequence is uncorrelated
with itself and with the inputsequence x(n).
3. The probability-density functionof the error is uniform over therange of quantization error.
Such assumptions are known to be,in general, untrue. However, they are areasonable approximation for large-amplitude, time-varying input signalswhen b is large and successive quanti-zation error values are not highlycorrelated. Furthermore, as we shallsee, results obtained through the use ofthis approximation yield accurate esti-mates of the signal-to-(quantization)-noise ratio, or SNR.
These assumptions allow us to repre-sent quantization as the introduction ofan additive white-noise source. This isdepicted in Fig. 2. As we shall see, thismodel enables in-depth understandingof the signal and noise in quantizationsystems. More exact models exist thatinclude gain terms applied to the signaland quantization noise, as in [2], butthe model depicted here is sufficientfor analysis.
The assumption that the quantizationerror is uniformly distributed over aquantization step gives
(3)
Since the error is white noise, thepower spectral density of the noise willalso have a uniform distribution withinthe limits of the Nyquist band. Theprobability-density function and powerspectral-density function are depictedin Figs. 3A and B respectively.
If the sampling rate satisfies thesampling theorem, i.e., the signal issampled at least twice the highestfrequency in the input signal, fs>2fB,then quantization is the only error in the
A/D conversion process (jitter and othereffects are not considered here). Usingthe assumption of uniform distribution,the average quantization noise is given by
(4)
and the quantization noise power isgiven by
(5)
From (1), we get
(6)
To find the SNR, we also need toestimate the signal power. Now assumewe are quantizing a sinusoidal signal ofamplitude A, x(t)=Acos(2πt/T). Theaverage power of the signal is thus
(7)
From (6) and (7), the signal-to-noiseratio may now be given by,
σ
π
x
x x x
T
E e e E e
TA t T dt
2
2 2
2
0
12
=
− = ={( ) } { }
( cos( / ))∫∫ =A2
2
σ e b b
q22
2 212
1
3 2 1
1
3 2= = ≈
⋅( - )
σ e q q
q q q
q qq
E e e
e p e de
qe de
2 2
2
21
= − =
=−∞
∞
−
∫
{( ) }
( )
/ 22
2 2
12
/
∫ =
e E e
e p e de
qe de
q q
q q q
q qq
q
= =
=
=
−∞
∞
−
∫
∫
{ }
( )
/
/1
02
2
p eq e q
e qq
q
q
( )/ | | /
| | /=
≤
>
⎧⎨⎪
⎩⎪
1
0
2
2
− ≤ ≤q e n qq/ ( ) /2 2
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
Fig. 2. The linear model of quantization
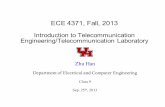
Fig. 4. SNR as a function of the number of bits in the quantizer for a PCM-encodedsignal, sampled at the Nyquist frequency.
Fig. 3. (a) Probability-density function and (b) power spectral-density function forthe quantization error under the linear model.
➥
SDM_Reiss.qxd 2/6/08 10:41 AM Page 2

one hundred fi fty years of content fi fteen leaders in science & technology research
three million documentsone gateway to it all
Search scitopia.org to find quality content from leaders in science
and technology research. Scitopia.org generates relevant and
focused results – with no Internet noise. From peer-reviewed journal
articles and technical conference papers to patents and more,
scitopia.org is a researchers’ heaven on earth.
Integrating Trusted Science + Technology Research
search
Scitopia.org was founded by: Acoustical Society of America · American GeophysicalUnion · American Institute of Physics · American Physical Society · AmericanSociety of Civil Engineers · American Society of Mechanical Engineers · AmericanVacuum Society · ECS · IEEE · Institute of Aeronautics and Astronautics ·Institute of Physics Publishing · Optical Society of America · Society of AutomotiveEngineers · Society for Industrial and Applied Mathematics · SPIE
07-PIM-0137_Scitopia_SLA_A_Rev1.1 1 5/1/07 2:49:12 PM
AES is now a Scitopia.org partner
p51_ScitopiaHouseAd 2/6/08 3:18 PM Page 1

52 J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February
(8)
Thus the signal-to-noise ratioincreases by approximately 6 dB forevery bit in the quantizer. Using thisformula, an audio signal encoded ontoCD (a 16-bit format) using PCM, has amaximum SNR of 98.08. Also notefrom (7) that the SNR is linearly relatedto the signal strength in decibels.
In Fig. 4, the SNR is given as a func-tion of the number of bits in the quan-tizer for two PCM encoded signals,sampled at the Nyquist frequency. Eq.(8) is used to predict the SNR, and thesimulated SNR is measured directly inthe time domain from signal varianceand quantization-error variance. Theinput signals are 2-kHz sinusoids,where it is assumed that the samplingrate is 44.1 kHz, with full range ampli-tude A=1 and with small amplitudeA=0.1. It can easily be seen, for a high-bit quantizer, that the signal-to-noiseratio is indeed given by Eq. (8). Theonly significant error is for a lownumber of bits due to the approxima-tion first introduced in Eq. (6).
Eq. (8) also gives a method bywhich the performance of sigma-deltamodulators may be compared withNyquist-rate PCM converters. Byinverting this formula for a full-scaleinput signal and incorporating all thenoise and distortion into the signal-to-noise-and-distortion ratio (SINAD), wehave the measurable effective numberof bits of a quantization,
(9)
NOISE SHAPING AND OVERSAMPLINGLet’s now assume that the signal isoversampled. That is, rather thanacquiring the signal at the Nyquistrate, 2fB, the actual sampling rate isfs=2r+1fB. The oversampling ratio isOSR=2r=fs/2fB. Thus, the quantizationnoise is spread over a larger frequencyrange yet we are still primarily con-cerned with noise below the Nyquistfrequency.
The in-band quantization noise power
can be found by integrating the powerspectral density over the passband,
(10)
where is the power spec-tral density of the (unshaped) quantiza-tion noise.
Most of the noise power is nowlocated outside of the signal band. Asdepicted in Fig. 5, the quantization-noise power within the band of interesthas decreased by a factor OSR. Thesignal power occurs over the signalband only, so it remains unchangedand is given by Eq. (7). The signal-to-noise ratio may now be given by,
(11)
Thus for every doubling of the over-sampling ratio, the SNR improves by 3 dB. The 6-dB improve-ment with each bit in thequantizer remains, so wecan say that doubling theoversampling ratio increasesthe effective number of bitsby half a bit.
Oversampling gives us ameans to reduce the requirednumber of bits in the quan-
tizer. However, this alone is not suffi-cient. According to Eq. (11), to achievea CD-quality recording (ENOB=16,fs=44,100 kHz) with an 8-bit quantizerwe would need an oversampling ratio of216, or sample rate of approximately2.89 GHz, which is unfeasible.
STF and NTF under the linearmodel
The above oversampling system per-forms no noise shaping. Consider a fil-ter placed in front of the quantizer(known as the loop filter), and the out-put of quantization is fed back andsubtracted from the input signal, asshown in Fig. 6. We now have a sys-tem that may be represented by trans-fer functions applied to both the inputsignal and the quantization noise. Inthe Z domain, the output may be rep-resented as
(12)
where STF is the signal transfer func-tion and NTF is the noise transferfunction. To find these values, notethat the input to the loop filter is X(z)-E(z) so that Y(z)=H(z)[X(z)-Y(z)]+E(z).
Y z
STF z X z NTF z E z
( )
( ) ( ) ( ) ( )
=+
SNR(dB)=
10log 10log
20log
10 10
10
σσ
x
e
r
A
2
22
6
+
+
�
.002 3 01 1 76b r+ +. .
S f fe e s( ) /= σ 2
σ
σσ
n ef
f
e B
se
S f df
f
fOSR
B
B
2
222
= =
=
−∫ ( )
/
ENOBSINAD
=-1.76
6 02.
SNR(dB)=
20log 10log =
20log
10 10
10
σσ
x
e
bA
A
�3 2
2
2 2
++ +6 02 1 76. .b
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
Fig. 5. Distribution of quantization noise for Nyquist rate sampling, 4 times, and 8 times oversampling
Fig. 6. Representation of a sigma–delta modulatorusing the linear model
SDM_Reiss.qxd 2/6/08 10:41 AM Page 3

J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February 53
Rearranging terms, we have,
(13)
And thus,
(14)So the linear model allows us to find
the effects on the signal and noise dueto any choice of filter function.
This filtering and feedback,combined with oversampling, are theessential elements of sigma–deltamodulation. The primary goal ofsigma–delta modulator design is tochoose a filter resulting in high stabil-ity and few artifacts, such that over thepassband,
(15)
If such is the case, then the noise hasbeen shaped away from the passbandand the signal passes unchanged.
First-order sigma–deltamodulation A/D converter
A first-order SDM has a single integra-tor in the loop filter. The simplestdesign has no additional gain terms andmay be given in the time domain as,
(16)
which is depicted in the blockdiagram Fig. 7A). Recalling that,eq=Q-u and describing the previoustime step, we have
(17)
A Z-domain block diagram is givenby Fig. 7B, and the correspondingequation is
(18)
Thus the signal transfer function isgiven by z-1. The signal is unaffectedand only delayed by one sample. Thenoise transfer function is 1-z-1, whichpushes the noise to high frequencies.Using trigonometric identities,
(19)
Unlike oversampled PCM, which hasunity NTF, the noise shaping insigma–delta modulation implies anonconstant noise power, given in the
baseband by,
(20)
where, again, is thepower spectral density of the unshapedquantization noise. The total noisepower, , remains unchanged, butnow the noise has been pushed up tothe high frequencies. This is depictedin Fig. 8, which gives the power spec-tral density for first-order SDM ascompared with PCM.
Assuming a high OSR, andusing a Taylor series expansion,sin(x)=x-x3/3!+ x5/5!…, Eq. (20) canbe solved to give
(21)
The signal-to-noise ratio may nowbe given by,
(22)
The effect of first-order noise shap-ing is evident. We now get animprovement of 9 dB for eachdoubling of the oversampling ratio,rather than the 3-dB improvement thatoccurs without noise shaping.
SNR for high-order sigma–deltamodulators
This technique can be extended tohigher-order filters. The transfer
SNR(dB)=10log2
20log
10
10
σσ πx
r
e
A b
2 3
2 2
3
6 02
⋅≈
+ . ++ −9 03 3 41. .r
σσ
ππ
π
n
e
sB
sB sf
ff
f f
2
2
2
42
2
3
=
−⎡
⎣⎢
⎤
⎦⎥ ≈
⋅
sin( / )
OSR332σ e
f fs B�
σ e2
S f fe e s( ) /= σ 2
σ n ef
f
S f NTF f dfB
B
2 2=−∫ ( ) | ( ) |
| ( ) |
( )( )
sin (
/ /
NTF f
e ej f f j f fs s
2
2 2
2
1 1
4
=
− − =− π π
π ff fs/ )
Y z X z z E z z( ) ( ) ( )( )= + −− −1 11
y n x n e n e nq q( ) ( ) ( ) ( )= − + − −1 1
u n x n y n u n( ) ( ) ( ) ( )+ = − +1
STF z NTF z( ) , ( )≈ ≈1 0
STF zH z
H z
NTF zH z
( )( )
( ),
( )( )
=+
=+
1
1
1
Y z H z
H z X z E z
( )[ ( )]
( ) ( ) ( )
1+ =+
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
Fig. 7. (a) first-order sigma–delta modulator given by its block diagram andalternatively (b), by its z-transform block diagram with the quantizer approximatedby a noise source.
Fig. 8. Normalized power spectral density for pulse-code modulation and for first-order SDM (no oversampling). Actual values are found by multiplying by .σ e sf
2 /
➥
SDM_Reiss.qxd 2/6/08 10:41 AM Page 4

54 J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February
function of a generic Nth-order SDMis given by
(23)
Thus, the noise transfer function isgiven by
(24)
Using an integral formula, this gives
(25)
where the approximate equality wasfound by using a Taylor series expan-sion on the sine terms and keepingonly the first nonzero terms.
Compared with the first-order SDM,this provides more suppression of thequantization noise over the lowfrequencies and more amplification ofthe noise outside the signal band. Eq.(25) can be used to find the generalformula for the SNR of an ideal Nth-order SDM,
(26)
Thus we see a large improvementwith increasing SDM order. For asecond-order SDM (N=2), there is a15-dB improvement in the SNR witheach doubling of the oversamplingratio.
In general, for an Nth-order SDM,there is a 3(2N+1) dB improvementin the SNR with each doubling ofthe oversampling ratio, and a 6-dBimprovement with each additionalbit in the quantizer. Thus, use ofhigh-order SDMs and a high over-sampling ratio offers a much betterSNR than that obtained by simplyincreasing the number of bits.
Of course, this is an approximation.It depends on the coefficients of themodulator, on the approximationsused in the derivation, and otherfactors. Nevertheless, it provides an
upper limit on the SNR. Fig. 9 depictsthe SNR for PCM encoding, a first-order SDM, and a second-order SDM.In each case 217 samples and a 16-bitquantizer were used, and the inputsignal had a frequency 101fs/217.Unlike in the PCM simulation for Fig.4, the quantization error and inputsignal samples are no longer timealigned, so the signal and noise powerwere calculated in the frequencydomain. There is strong agreementbetween theory and simulation, withthe differences being attributable tothe assumption of high oversamplingratio (for the Taylor series truncation),the difficulty in accurate measurementof SNR, particularly at large values,and the assumptions mentioned
earlier, particularly that of uniformPDF over the range –q/2 to +q/2.Nevertheless, the 3-dB, 9-dB, and 15-dB increases for doubling the OSRhave been confirmed, and there is reasonable agreement throughout.
ISSUES IN SIGMA–DELTAMODULATIONAs reported in [3, 4], 64-times-over-sampled 1-bit A/D converters, using afifth-order SDM have been designedand achieve an SNR over 120 dBs.Yet from Eq. (26), we find that
(27)
To date, no one has designed asigma–delta modulator with such highperformance. As an example, consider
SNR(dB) 20log10≈ +A 167 15.
SNR(dB)=10log
10log2
10
10
σσ
x
eN rN
2
2
2 12 1
+
+ +( ) ( )
ππ2
6 02 1 762 1
N
A bN
≈
+ + ++ −
20log10log 9.94
10
10
. .( ) NN
N r+
+3 01 2. ( )1
σ
σπ
n ef
f
e
ss
S f NTF f df
ff f
B
B
2 2
2
2
= =−∫ ( ) | ( ) |
[ sin( / ))]
( )
2
22
2 12 1
N
f
f
e
N
N
df
N OSR
B
B
−
+
∫ ≈
+σ π
NTF f e j f f Ns( ) ( )/= − −1 2π
Y z X z z E z z
STF z X z NTF z
N( ) ( ) ( )( )
( ) ( ) ( )
= + − =+
− −1 11
EE z( )
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
Fig. 9. SNR as a function of r, the log2 of the oversampling ratio. In each case, 217
samples and a 16-bit quantizer were used, and the input signal had a frequency101fs/217.
Fig. 10. Implementation of a realistic fifth-order feedforward SDM
SDM_Reiss.qxd 2/6/08 10:41 AM Page 5

J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February 55
a 1-bit, arbitrary-order feedforwardSDM that may be represented as,
(28)
x is the input signal and y the outputbitstream, as before, and isthe input to the quantizer, where c is acoefficient vector determining noise-shaping characteristics. A practicalfifth-order implementation of thisdesign, Fig. 10, is described in [5], andis intended to be used for analog-to-digital conversion in audio applications(we will return to this SDM later inthis section to demonstrate otherphenomena). The SDM is lowpass, hasa corner frequency of 80 kHz for asample rate of 64 x 44.1 kHz, and isgiven by the coefficients,
(29)
Fig. 11 depicts the theoretical SNRas a function of input signal amplitudefor an ideal fifth-order SDM, and boththeoretical and simulated SNR esti-mates for the SDM given by Eq. (28)and (29). In both cases, the SDM wasassumed to be 1 bit with an oversam-
pling ratio of 64. The theoretical SNRis computed directly from the signalpower and in-band noise power. In-band noise power is found from theintegral given by Eq. (20), which isnumerically integrated for the practicalSDM and may be found from Eq. (26)for the ideal SDM. Note that the practi-cal design has an SNR almost 80 dBless than that of the ideal design, andthat simulation shows a dramatic dropin performance for input amplitudegreater than 0.77.
The archetypal Nth-order SDM withNTF (1-z-1)N is highly unstable; henceloop filters with less-aggressive noiseshaping are used. But even this less-aggressive SDM becomes unstable withlarge input values. Thisinstability problem isnot explained by thelinear model. In fact,there are a host ofissues in sigma–deltamodulation that arecaused by feedbackaround a highly nonlin-ear quantizer. In thissection we will look atthe related causes ofthese unwanted behav-iors and highlight thecurrent state of under-standing and research.
Limit cycles
Consider a single-bit
first-order SDM as given by Eq. (16)with constant input x=.5, and an initialcondition, say, u(n)=0.1>0
(30)
Thus, the input to the quantizer repeatswith a period of 4 iterations and thequantizer produces a repeating outputbitstream +1,-1,+1,+1… Note that theaverage value is [3*(+1)+1*(-1)]/4,which is the same as the input. Thisrelationship can be easily shown for afirst-order SDM since repeated appli-cation of Eq. (16), leads to
(31)
If we assume constant input and thatu repeats after k cycles, we have
(32)which implies that average output isequal to the input signal. The occur-rence of a repeating sequence in theoutput bitstream is known as a limitcycle. It poses problems in the signalprocessing of the output. More seri-ously, when SDMs are applied inaudio applications, limit cycles canresult in audible artifacts. For instance,in the case just mentioned, the inputwas purely DC, yet the limit cycleresults in a square wave with 75% dutycycle and frequency fs/4 at the output.
The theory of limit cycles in low-
kx y n ii
k
= +=
−
∑ ( )0
1
u n k
x n i y n i u ni
k
i
k
( )
( ) ( ) ( )
+ =
+ − + +=
−
=
−
∑ ∑0
1
0
1
u n
u n
u n
( ) . . .
( ) . . .
( )
+ = − + = −+ = + − =+ =
1 5 1 1 4
2 5 1 4 1 1
3 .. . .
( ) . . .
5 1 1 1 6
4 5 1 6 1
− + =+ = − + =u n
c = [ . ,
. ,
. ,
0 5761069262
0 1624753515
0 0276093301
0.. ,
. ]
0028053934
0 0001360361
u = ⋅cc ss
y n n
s n s n x n y n
s n
( ) sgn( ( ))
( ) ( ) ( ) ( )
(
= ⋅+ = + −
c s
1 1
2
1
++ = +
+ = +−
1
1
1 2
1
) ( ) ( )
...
( ) ( ) ( )
s n s n
s n s n s nN N N
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
Fig. 11. Estimates of the signal-to-noise ratio as a function of input signalamplitude for an ideal SDM, derived from theory, and for a practical SDM, bothderived from theory and estimated from simulation. In all cases, the SDM wasassumed to be 1-bit, fifth-order, with an oversampling ratio of 64.
Fig. 12. Plot of the input to the quantizer as a function ofthe iterate for a fifth-order SDM. The quantizer input,and hence the output bitstream, enter a limit cyclearound iterate 2300 and again at approximately 8400.
➥
➥
SDM_Reiss.qxd 2/6/08 10:41 AM Page 6

56 J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February
order (first- and second-order)sigma–delta modulators is well under-stood. Yet limit cycles can exist inhigh-order SDMs operating undernormal conditions. Returning to theSDM described in the introduction atthe beginning of this section, with aninput of 0.7 and initial conditions s=0,it exhibits a short-term limit cycle. Thiscan be seen in a time series of the inputto the quantizer, as depicted in Fig. 12.This example illustrates both the exis-tence of limit cycles in high-orderdesigns and the fact that limit cyclesmay also appear for finite duration.
It is only in recent years that thetheory of limit cycles has been extendedto characterize behavior in higher-orderSDMs [5-10]. Reefman’s Theoremshows that, for most SDM designs, DCinput implies that the output bitstream isperiodic if and only if the state-spacevariables (a vector describing the currentstate of the system) are periodic. Usingthis condition it was possible to find alllimit cycles that may occur for a givensigma–delta modulator and the set ofinitial conditions that may generatethem. This allowed a description ofsensitivity to limit cycles for differentSDM designs and the ease by whichvarious techniques may be used to breakout of a limit cycle. Other significantrecent results include analysis of limit-cycle behavior with nonconstant, peri-odic input and development oflimit-cycle detection and removal techniques.
Design of SDMs to avoid limitcycles is accomplished either by usingmore complex noise shaping structures[11] or through the addition of dither ora control [12] in order to suppress limitcycles in an existing design. Questionslinger concerning how problematiclimit cycles are when the input has asmall amount of noise, such as withanalog implementations of SDMs whenthe limit cycle is of finite duration orwhen the input is not constant but theoversampling ratio is large enough suchthat the input appears nearly constantover a short duration. The frameworkestablished in [5] may be used toaddress these issues.
Idle tones
There is little theoretical understand-ing of idle tones, even for the simplest
low-order sigma–delta modulators.Perhaps the most significant is earlywork by Candy [13] that showed thatin a first-order SDM the idle tone issimply an alias of an overtone of asquare wave that is discretely sam-pled. Thus it is suspected that a similarphenomenon may account for idletones in higher-order SDMs. The idle-tone phenomenon in higher-orderSDMs has been described in [14, 15],and experimental evidence of idle-tone behavior in a second-order band-pass SDM was reported in [16].
It is important to distinguishbetween limit cycles and the relatedphenomenon of idle tones. The repeti-tive patterns that exist in the outputbitstream are referred to as idlepatterns or limit cycles. Whereas anidle tone is represented by a discretepeak in the frequency spectrum of theoutput of a SDM, but superimposed ona background of noise (see Fig. 13). In
this case there is no unique series ofrepeating bits.
This distinction is often blurred, andalternative definitions are sometimesused. Kozak and Kale [17] do notdistinguish between limit cycles andidle tones per se, but instead refer to idletones as periodic patterns with constantinput and harmonic tones as periodicpatterns resulting from sinusoidal input.
Bourdopoulos [18] reported idletones occurring with both constant andsinusoidal input for a third-order SDM.The latter we would refer to asharmonic distortion. He also linked thegeneration of idle tones to the exis-tence of almost repeating patterns.Ledzius [19] used this link to infer thatsince a linear model of an SDM cannotaccount for limit cycles, it must not beable to account for idle tones either.This link to limit cycles (exactly peri-odic sequences) has also beensuggested by Angus [20] and ➥
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
Fig. 13. Illustration of the definitions used to distinguish a limit cycle (left) from anidle tone (right). A limit cycle consists of a finite number of discrete peaks in thefrequency spectrum; an idle tone is a peak in the frequency spectrum, butsuperimposed on a noise background.
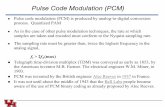
Fig. 14. Power spectrum of a 64 times oversampled fifth-order SDM with constantinput of amplitude 0.7, depicting idle tones.
SDM_Reiss.qxd 2/6/08 10:41 AM Page 7

For additional information about the position and to complete the online application, visit http://jobs.belmont.edu.
Review of applications will begin immediately. Belmont University is an equal opportunity /affirmative action employer under all applicable civil rights laws.
Women and minorities are encouraged to apply.
AssistAnt Professor of
Audio engineeringtechnology
Located near Nashville’s Music Row, the Mike Curb College of Entertainment
and Music Business at Belmont University enrolls 1200+ majors and
combines classroom experience with real-world applications. Facilities
feature state-of-the-art classrooms and recording studios, including the
award-winning Ocean Way Nashville studios, Historic RCA Studio B, and
the Robert E. Mulloy Student Studios in the Center for Music Business.
❑ Teach 24 credit hours per year.
❑ Advise students with academic progress and mentor students in research and other class-related activities.
❑ Engage in activities to support the mission and vision of Belmont University and the College.
❑ Engage in scholarly activity and professional development.
❑ Participate in departmental work as appropriate.

58 J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February
Jespers [21]. Yet recent work by theauthors has shown that, although thesetones are related to the input in muchthe same way as for limit cycles, theyare not easily accounted for within thecurrent theory of limit cycles [9].
However tempting, the assumptionthat idle tones result from limit cycleshas so far left several phenomena unex-plained. First, the limit cycle produces aspectrum with discrete peaks of compa-rable amplitude occurring at multiplesof the limit-cycle frequency [9]. Thus,for a limit cycle with a short period, allpeaks would be out of the audible band.For a limit cycle with sufficiently longperiod to produce audible tones, almostall harmonics would be present andsignificant. This is in direct contrast toidle tones, which are known to producea relatively small number of peaks andthe higher harmonics are of smallamplitude. Furthermore, limit cycles arehighly sensitive to initial conditions andinput. An infinitesimal change in theinput will completely remove a limitcycle, and a change in initial conditionswill destabilize it. Idle tones, on theother hand, may be observed regardlessof initial conditions and persist as theinput is changed. Finally, it has beenshown that limit cycles exist only if theinput is constant or periodic [6] whereasthere are no known similar constraintson idle tones.
The phenomenon of idle tones isillustrated in Fig. 14, which depicts thepower spectrum of the fifth-orderSDM described in the previous sectionon limit cycles, with constant input of0.7. The strongest idle tone occurs at423.36 kHz, or exactly 3/20 of thesampling frequency of 64 x 44.1 kHz.The next strongest is the first harmonicof this tone. This is also evidence of asimple relationship observed in [22]. Inthat paper the authors noted that thefrequency of the fundamental idle tone,referred to as fFIT, is proportionallyrelated to the amplitude of the inputsignal,
(33)
Here, we refer to the amplitude asrelated to full scale. An input of ampli-tude 0.7 is 17/20 of the full scale from-1 and +1, or 3/20 of the full scale on areverse x-axis, from +1 to -1. Since17fs/20 is above fs/2, we would expect
the frequency of the idle tone to be3fs/20, as observed. The other signifi-cant idle tones are due to harmonicsand aliasing of the fundamental tone.Although the fundamental idle tone istypically far outside the audible range,higher-order harmonics of this tonemay alias back to lower frequencies.
It is important to note that the rela-tionship given by Eq. (33), thougheasily observed, has no known theoret-ical justification. Nor does there yetexist any theory that will estimate theamplitudes of the idle tones. This isperhaps more relevant since thedesigner is concerned with unwantedtones that are significantly above thenoise floor. Furthermore, the funda-mental and its harmonics may notaccount for all observed tones. Thus amore detailed understanding of idletones remains a significant challenge.
Proposed solutions to idle tones andharmonic distortion are the addition ofdither or the use of chaotic SDMs [23].These same solutions are effective ineliminating limit-cycle behavior. Thus,it is believed that these are, at least inpart, dynamical systems phenomena,but not a direct consequence of limitcycles. Nonlinear dynamics techniquesmay therefore be successful in devis-ing a parallel analytical approach to theunderstanding of idle tones.
Harmonic distortion
As with idle tones, there are multipledefinitions of harmonic distortion in
the literature. Harmonic distortion,though also appearing as undesiredtones, occurs when sinusoidal input isapplied. It may be defined as the pres-ence of harmonics (signals whose fre-quencies are integer multiples of theinput signal) and other spurs in theoutput spectrum that were not presentin the input signal. In this case we areconcerned both with peaks that aredue to unwanted harmonics or aliasingof the input signal and those that bearno apparent relationship to the inputfrequency.
Kozak and Kale [17] refer toharmonic tones as periodic patternsresulting from sinusoidal input (thesewould still be considered limit cyclesunder our previous definition).Experimental evidence of harmonicdistortion was given in [24] and [25].Theoretical results have typically beenlimited to approximate analysis ofsecond-order or third-order harmonics[26] or low-order modulators [13, 27].They are also specific to harmonicdistortion that appears as a result ofcircuit imperfections, as opposed to theinherent distortion components inhigh-order SDMs. Aliasing of thedistortion components back into thepassband was described in [28], thoughno theoretical approach was provided.
Harmonic distortion is depicted inthe power spectrum shown in Fig. 15,which is identical to Fig. 14 exceptnow the constant input of 0.7 has beenreplaced with sinusoidal input of
f A fFIT DC s=
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
Fig. 15. Power spectrum of a 64 times oversampled fifth-order SDM with sinusoidalinput of frequency 5 kHz and amplitude 0.7, depicting harmonic distortion.
SDM_Reiss.qxd 2/6/08 10:41 AM Page 8

J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February 59
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
amplitude 0.7. The distortions are farmore numerous than the idle tonesproduced from constant input and areespecially intriguing because theyshow no obvious relationship to theinput frequency or amplitude. In bothcases, fortunately, the tones are faroutside the audio band (though this isnot always the case).
Harmonic distortion, even though it isa serious issue, is not well understood.It is known that it is more problematicin low-order designs, and the sametechniques that are used to remove idletones may be applied here. The originsof harmonic distortion lie in the factthat, in a low-bit representation, sinu-soidal signals are represented in theoutput bitstream as close to a squarewave. Since square waves have strongharmonics, these harmonics appear inthe output spectrum. However, nogeneral theory exists allowing one toanalytically derive the dominantharmonics and their amplitudes or todetermine the susceptibility of differentfilter designs to harmonic distortion.
Noise modulation
We begin by looking at dither distribu-tions and the resultant quantization errorin PCM systems. The approach used isslightly simpler though less rigorousthan that in [1]. The analysis in this sec-tion is presented primarily because theanalysis of SDM systems can be madevia an extension of this approach.
Recall that an infinite midriser
quantizer has the input-output charac-teristic , wherew is the input to the quantizer. If theinput to a PCM system, x, is feddirectly into the quantizer, then thetotal error between input and output issimply
(34)
Thus the mth moment of the errorfor a given x is
(35)
Under such circumstances, all errormoments are dependent on the inputvalue x. In particular, the secondmoment, the quantization noise power,depends on the signal. This is knownas noise modulation. It can beperceived in the quantization of audiosignals and is generally undesirable.
However, if random noise withuniform probability distribution from–q/2 to +q/2, otherwise known as rect-angular PDF (RPDF) dither of size 1Least Significant Bit (LSB), is appliedimmediately before quantization thenthe PDF of the input to the quantizerhas the form,
(36)
The input ranges over 1 LSB, sothe ou tpu t can assume on ly 2poss ib le va lues . I f we def ine
, thenthe error has the distribution,
(37)and hence, using Eq. (35), the first
error moment becomes independent ofthe input.
(38)Note that this was also the result of
the uniform distribution assumption inthe linear model, Eq. (4), only now theaddition of dither makes the assump-tion fully valid. In fact, it can be shownthat nth-order dither will make the firstn error moments independent of theinput. Triangular (TPDF) dither ofwidth 2 LSBs, which can be generatedby summing two rectangular PDFdithers of width 1 LSB, will renderboth the first- and second-ordermoments of the error independent ofthe input signal. That is, the quantiza-tion noise will have a constant averageof zero and a constant (nonzero) powerindependent of the input signal charac-teristics. The dithering forces the quan-tization noise to lose its coherence withthe original input signal, but has thedrawback of raising the average spec-tral noise floor.
The effect of dither on the conditionalmoments of error is depicted in Fig. 16.This shows the first two conditionalmoments of error (average quantizationnoise and average quantization noisepower) as a function of the system inputfor a PCM system without dither, withRPDF dither and with TPDF dither.This PCM system uses the same 3-bitmidriser quantizer as depicted in Fig. 1.The results were found from simulationof 100,000 data points with a constantinput to the system and a randomnumber generator used to create thedither signal. With RPDF dither, theaverage quantization noise remainsfixed at zero, regardless of the inputsignal. With TPDF dither both the aver-age quantization noise and the averagequantization noise power are constant,thus the noise modulation has beenremoved. However, due to the finite bitsin the quantizer, the results do not holdfor the lowest and highest quantizationlevels with RPDF dither, and do nothold for the lowest two and highest twoquantization levels with TPDF dither.
To date, the theory of noise
e p e
q y y qy yq q( )
( ) ( )
∑ =
− − − =1 1 0
eq y p y
qy p yq =− =
− = −⎧⎨⎩
( )1
1
y x q x q= + − +⎢⎣ ⎥⎦/ / / /1 2 1 2
p w
q x q w x q
otherwise
( )
/ / /
=− < ≤ +⎧
⎨⎩
1 2 2
0
e p e q x q q xq qm( ) ( / / )∑ = ⎢⎣ ⎥⎦ + −2
e q x q q xq = ⎢⎣ ⎥⎦ + −/ / 2
Q w q w q q( ) / /= ⎢⎣ ⎥⎦ + 2
➥
Figure 16. The first two conditional moments of error (average quantization noiseand average quantization noise
SDM_Reiss.qxd 2/6/08 10:41 AM Page 9

60 J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February
modulation has not yet been extendedfrom PCM to SDM. Though the use ofdither to prevent noise modulation inpulse-code modulation is well under-stood, there are many intriguing ques-tions that remain when dither is appliedto a sigma–delta modulation system.The feedback loop affects the distribu-tion of the input to the quantizer incomplicated ways. Many researchershave suggested that this leads to a formof “self-dithering,” but correlationsremain between the quantization noiseand the input signal. In addition, one-bit sigma–delta modulation isfrequently used, yet RPDF dither of 1LSB or TPDF dither of 2 LSBs, asmentioned above, will cause the quan-tizer to be overloaded [29], and noamount of dither in a one bit systemwill produce constant noise power [30].
Dead zones
For certain input signals, the inputmay not be properly encoded by theSDM. That is, there is a range of inputfor which the sigma–delta modulatormay produce the same average outputvalue. This range is known as a deadzone.
Consider a first-order SDM with alossy integrator, such that Eq. (16) isreplaced by
(39)
where c<1. For x<<1, y(0)=+1, thisyields,
(40)
which gives the output bitstreamy(n)=+1,-1,+1,-1,… The generalformula for the input to the quantizerbecomes,
(41)
When x is equal to 0, and c<1, thenthis produces the limit cycle +1,-1. Inorder to break out of this limit cyclefor nonzero x, at some point we musthave, for odd k,
(42)
or for even k,
(43)
In the limit of large k, these formulasbecome
and (44)
That is, all input in the range
(45)
will not break out of a limit cycle, andthus will have no effect on the output.The region of input defined by Eq. (45)is known as a dead zone, and thephenomenon is sometimes referred toas a threshold effect. It is strongly
related to limit cycles in that the outputis an endlessly repeating bitstream.
A formal definition would be that adead zone is a continuous range ofSDM input, such that, for given initialconditions, the same output bitstreamwould be produced.
If one considers a nonzero initialcondition, then Eq. (41) becomes
(46)
which in the limit of large k still reducesto Eq. (41). Thus, this dead zone is inde-pendent of initial conditions.
It should be mentioned that in a first-order SDM, dead zones occur forevery limit cycle. Since the limit cyclesexist with any rational input, this canbe rephrased as stating that dead zonesexist in the neighborhood of everyrational input. Similar phenomenaexist in second-order SDMs. Fig. 17depicts the average output of asigma–delta modulator as a function of DC input. It can be seen that both first-and second-order SDMs may exhibitdead zones.
Dead zones are familiar to the SDMcommunity and are mentioned in manydesign textbooks [31]. There was someextensive analysis of dead zones in first-and second-order SDMs in the work ofFeely [32-36]. However, she did notrefer to them as such, and insteaddiscussed the staircase structure of theSDM output as a function of input,which characterizes the dead zones.
To date, no one who has character-ized the dead zones that can exist inhigh-order SDMs nor fully character-ized the possible relationships betweendead zones, initial conditions, andinput. However, though this seemstractable, there is little evidence thatdead zones are a serious issue in high-order SDM designs.
Stability
In our earlier introduction to the issuesin SDM, we stated that the primaryreason that ideal SNRs are notachieved with high-order SDMs is thatmany designs are highly unstable.There has been much research intostability issues in SDMs, but manyessential questions remain unsolved.At its core, one would like to derive
u k c u c x ck i k
i
ki( ) ( ) ( ) ( )= + + − −
=
−
∑0 10
1
c
cx
c
c
−+
< <−+
1
1
1
1
x
c c1
1
1−<
−+
x
c c1
1
1−>
+
u k c x ci
i
ki
i
k
( ) ( )< → < − −=
−
=
−
∑ ∑00
1
0
1
u k c x ci
i
ki
i
k
( ) ( )> → > −=
−
=
−
∑ ∑00
1
0
1
u k c x ci k i
i
k
( ) ( ) ( )= + − −=
−
∑ 10
1
u(1) = cu(0)+x-y(0) = x-1<0
u(2) = cu(1)+x-y((1) = (1+c)x+(1-c)>0
u(3) = cu(2)+x-y(2) = ((1+c+c )x-(1-c+c )<02 2
u n cu n x n y n( ) ( ) ( ) ( )= − + − −1 1
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
Fig. 17. Average output as a function of DC input for first- and second-order SDMswith integrator leak
SDM_Reiss.qxd 2/6/08 10:41 AM Page 10

J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February 61
values of constant input such that, forcertain initial conditions, the magni-tude of the quantizer input willdiverge toward infinity. A similarquestion is, given initial conditionsand constant input, determine if thisleads to stable behavior.
For the first-order SDM, it is easy toshow that it is stable for all input -1<x<1 and to find the related bitstreambehavior. Returning to the time-domainexpression given by Eq. (16), assume xis constant and -1<x<1. The following 2relationships show that a negative u willincrease until it is positive, and a posi-tive u will decrease until it is negative.
(47)
Thus it is oscillating between posi-tive and negative values. Now assumethat at least one bit flip has occurred(i.e., the transient behavior has passedand we are not starting from arbitraryinitial conditions). From Eq. (47), themaximum value of u occurs when theprevious value is just below zero andthe minimum value occurs when theprevious value is equal to zero
(48)
Thus u is limited to the range [-1+x;1+x].
The first-order SDM can be iteratedto give, when the output bits all havethe same sign,
(49)
Assume that there are exactly n+
positive output bits in a row. Then wehave
(50)
Since the maximum value of u isx+1, we have that the maximumnumber of output bits occurs when,
(51)
so the maximum number of positiveoutput bits is given by the largest n+
such that
(52)
similarly, the maximum number ofnegative output bits is given by the
largest n- such that
(53)
The standard second-order SDM hassimilar stability properties in thatstability is independent of initial condi-tions, but proof of boundedness is nottrivial. A linear programming approachis used by Farrell and Feely [37]. Theyassume that there have been somenumber n- iterations with negativeoutput. From this, they identify themaximum values of the state-spacevariables for the first positive outputbit. This value is used to identify themaximum number of positive outputbits, which results in n+. They thenfind the maximum number of negativeoutput bits that result from the n+ posi-tive bits. This new value of n- isstrictly less than n+ and hence theoscillations are bounded. This success-fully finds the bounds on the second-order SDM and may be extended tosecond-order SDMs with leaky orchaotic integrators, and their resultsbear strong agreement with simulation.
To the best of our knowledge, thereis no successful analytical approach tostability in high-order SDMs (ordergreater than 2). There are several alter-native approaches to stability insecond-order SDMs, some preliminarywork on third-order designs, and onlysketched approaches to stability in higher-order SDMs. Thus the ques-tion becomes, “Can any existing
approaches be extended to higher-order SDMs?” Of course, there is therelated question of whether existingapproaches are correct.
Risbo [38] discussed stability ofSDMs in detail, primarily from anonlinear dynamics perspective. But,with the exception of first-order SDMs,he did not attempt a method for itsdetermination. A computationalapproach to finding the invariant sets,which consist of initial conditionsgiving rise to stable behavior, isderived by Schreier [39–41]. Althoughneither analytical nor rigorous, it issignificant because source code isavailable and because results areprovided that may be confirmed ordenied by other methods. Hein andZakhor’s approach [42] is to use thelimit cycles as a measure of stability.Their method is not rigorous, in that itpostulates that the limit cycles have aconvergent bound on the state-spacevariables, and that this is also the boundfor nonlimit cycle behavior. Wang [43]converted a third-order modulator to acontinuous-time system by looking atthe vector field equations. By consider-ing only boundary points, he is able toconvert the 3-dimensional flow into a2-dimensional return map. Fixed pointsof this map then yield insight intostability of the SDM. Zhang [44, 45]used a model of the quantizer to esti-mate the stability of a third-order SDM. The linearization implies thatimportant phenomena have been
nx
− ≤+2
1
nx
+ ≤−2
1
x n x+ + − − ≥+1 1 1 0[ ]( )
u
u n u n x
( )
...
( ) ( ) [ ]( )
1 0
1 1 1 0
≥
= + − − ≥+ +
u n m u n m x y( ) ( ) ( )+ = + −
u n u n x
u n u n x
( ) ( )
( ) ( )
→ ⇒ + +
= ⇒ + = −<
0 1 1
0 1 1
∼
u(n)<0 u(n+1) = u(n)+x+1>u(n)
u(n) 0 u(n+1)
⇒≥ ⇒ == u(n)+x-1<u(n)
➥
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
Fig. 18. The absolute magnitude of the quantizer input in a fifth-order SDM as afunction of iterate for various constant input magnitudes. At x=0.7, the quantizerinput is stable, at x=0.9 the quantizer input is unstable and oscillating withexponentially increasing period and amplitude, and at x=1.1 the quantizer input isunstable but nonoscillating.
SDM_Reiss.qxd 2/6/08 10:41 AM Page 11

62 J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February
omitted. Furthermore, there is littlecomparison of the results with simula-tion. Another work by Zhang [46] bearsa strong resemblance to the linearprogramming approach of Feely.
Steiner and Yang [47, 48] use a trans-formation that decouples the state-spacevariables, except through their interac-tion in the quantization function. Theysuggest how this may be used to tacklestability but there is little analysis. Thisapproach has been expanded by Wong[49] to deal with practical high-orderSDMs. Wong provides simulatedresults for many high-order SDMs, buthis analysis does not confirm simula-tion. Mladenov et al. [50] also use arelated transformation and have shownpromising results on simple but high-order SDMs. The author and collabora-tors are currently investigating thepotential of this technique.
Now we will show that the state-space variables are always unboundedfor |u|>1, and that the state-space vari-ables oscillate between positive andnegative values for |u|<1. Note that thisoscillation does not guarantee stablebehavior, but an understanding of theoscillations may lead to an understand-ing of stability.
Returning to the arbitrary SDMgiven by Eq. (28), it is easy to see that
(54)
If x>1, , regardless ofc. Therefore, , e.g., s1always increases. Hence, for some k,
. At which point s2 willincrease, and at some point it willbecome positive, and so on. Thisimplies that, at some point all state-space variables will increase.Similarly, if x<-1, at some point, allstate-space variables will decrease.Thus, for any feedforward SDM in thisform, the bounds are always <=1.
Assume 0<x<1, Assume y(n)>0. So
(55)
So s1 decreases. s2 may still increase,but eventually s1 becomes less than 0.Then s2 starts to decrease, and so on.Eventually , and y(n) flips to -1. Now, the same procedure happensagain, but with each variable increas-ing. This gives oscillation. The prob-
lem comes when each oscillation takeslonger than the previous one. Anexample of this oscillation is depictedin Fig. 18. For x=0.9, the system isunstable but still oscillating between -1and +1 output, though the oscillationsare exponentially increasing in bothamplitude and period.
CONCLUSIONIn this tutorial we have discussedmethods of operation, design, and useof sigma–delta modulators. Althoughwe considered the design of asigma–delta modulator as used foranalog-to-digital conversion, theresults derived here could easily begeneralized. The descriptions applyequally for SDMs used in other appli-cations, such as D/A converters orClass D amplifiers. The SNR formulasin the linear model and pulse-codemodulation section and the section onnoise shaping and oversampling canalso be modified for different inputsignals or filter designs. The examplesin the section on SDM issues couldapply to multibit SDMs as well.
We’ve identified several key issuesin sigma–delta modulation: limitcycles, idle tones, dead zones,harmonic distortion, noise modulation,and stability. To some extent limitcycles may be considered a mostlysolved problem, whereas for each ofthe other problems the issues areunderstood for low-order design butthe theory is not yet established for thehigh-order designs. Dead zones havebeen effectively characterized for low-order designs, but they have not beenreported to be problematic in high-order or commercial designs. Noisemodulation is well understood forPCM, yet there is no well establishedtheory for even low-order sigma–deltamodulators. Idle tones and harmonicdistortion, though not well understood,are clearly related phenomena. Withidle tones in particular, well-definedand simple relationships between theinput signal and the frequencies of thetones have been observed that do notyet have a theoretical basis.
Noise modulation, idle tones,harmonic distortion, and limit cyclesmay be dealt with, at least in part,through the application of dither.However, dither is less effective when
used with a low bit quantizer, which isalso when these issues are most seri-ous. Furthermore, dither is not helpfulin dealing with stability issues, andwill actually decrease the stable rangeof a sigma–delta modulator. A betterunderstanding of stability (and of otherissues) is needed so that robust, high-performance implementations may bedeveloped. There have been manypromising recent results that may leadtoward a theory of stability insigma–delta modulators; this remainsan active area of investigation for theauthor.
REFERENCES[1] S. P. Lipshitz, R. A. Wannamaker,
and J. Vanderkooy, “Quantization andDither: A Theoretical Survey,” J. AudioEng. Soc., vol. 40, pp. 355–375 (1992May).
[2] S. H. Ardalan and J. J. Paulos,“An Analysis of Nonlinear Behavior inDelta–Sigma Modulators,“ IEEE Trans.on Circuits and Systems I: FundamentalTheory and Applications, vol. 34, pp.593–603 (1987).
[3] D. Reefman and E. Janssen,“Signal Processing for Direct StreamDigital: A Tutorial for DigitalSigma–Delta Modulation and 1-BitDigital Audio Processing,“ PhilipsResearch, Eindhoven, White Paper 18(2002 Dec.).
[4] D. Reefman and P. Nuijten, “WhyDirect Stream Digital (DSD) Is the BestChoice as a Digital Audio Format,”presented at the 110th Convention of theAudio Engineering Society, J. AudioEng. Soc. (Abstracts), vol. 49, p. 545(2001 Jun.), convention paper 5396.
[5] D. Reefman, J. Reiss, E. Janssen,and M. Sandler, “Description of LimitCycles in Sigma–Delta Modulators,”IEEE Trans. on Circuits and Systems I:Regular Papers, vol. 52, pp. 1211–1223(2005).
[6] J. D. Reiss and M. B. Sandler,“They Exist: Limit Cycles in HighOrder Sigma–Delta Modulators,”presented at the 114th Convention of theAudio Engineering Society, J. AudioEng. Soc. (Abstracts), vol. 51, p. 436(2003 May), convention paper 5832.
[7] D. Reefman, J. D. Reiss, E.Janssen, and M. B. Sandler, “StabilityAnalysis of Limit Cycles in High OrderSigma–Delta Modulators,” presented at
sNn( ) < 0
s s x sn n n1
11 11( ) ( ) ( )+ = + − <
s k1 0( ) >
s n s n1 11( ) ( )+ >x y n− >( ) 0
s n s n s n
s n s ni i i
i i
( ) ( ) ( )
( ) ( )
> ⇒ + >< ⇒ + <
+ +
+
0 1
0 11 1
1 ss ni +1( )
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
SDM_Reiss.qxd 2/6/08 10:41 AM Page 12

J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February 63
the Audio Engineering Society 115thConvention, J. Audio Eng. Soc.(Abstracts), vol. 51, p. 1240 (2003Dec.), convention paper 5936.
[8] J. D. Reiss and M. B. Sandler, “AMechanism for the Detection andRemoval of Limit Cycles in theOperation of Sigma–Delta Modulators,”British Patent Application No.0514677.4, UK patent filed July 18th2005.
[9] J. D. Reiss and M. Sandler, “TheHarmonic Content of a Limit Cycle in aDSD Bitstream,” presented at the AudioEngineering Society 116th Convention,J. Audio Eng. Soc. (Abstracts), vol. 52,p. 806 (2004 Jul./Aug.), conventionpaper 6092.
[10] D. Reefman, J. D. Reiss, E.Janssen, and M. Sandler, “Descriptionof Limit Cycles in FeedbackSigma–Delta Modulators,” presented atthe Audio Engineering Society 117thConvention, J. Audio Eng. Soc.(Abstracts), vol. 53, p. 110 (2005Jan./Feb.), convention paper 6280.
[11] A. Gothenberg and H. Tenhunen,“Improved Cascaded Sigma–DeltaNoise Shaper Architecture withReduced Sensitivity to CircuitNonlinearities,” Electronics Letters, vol.38, pp. 683–685 (2002).
[12] C. Y.-F. Ho, B. W.-K. Ling, andJ. D. Reiss, “Fuzzy Impulsive Control ofHigh Order Interpolative LowpassSigma–Delta Modulators,” to appear inIEEE Trans. on Circuits and Systems-I:Regular Papers (2005).
[13] J. C. Candy and O. J. Benjamin,“The Structure of Quantization Noisefrom Sigma–Delta Modulation,” IEEETrans. Commun., vol. COM-29, pp.1316–1323 (1981).
[14] A. J. Magrath and M. B. Sandler,“Efficient Dithering of Sigma–DeltaModulators with Adaptive Bit Flipping,”Electronics Letters, vol. 31 (1995).
[15] R. Schreier, “On the Use ofChaos to Reduce Idle-Channel Tones inDelta-Sigma Modulators,” IEEE Trans.on Circuits and Systems I, vol. 147, pp.539–547 (1994).
[16] J. M. de la Rosa, B. Perez-Verdu, F. Medeiro, R. del Rio, and A.Rodriguez-Vazquez, “Analysis andExperimental Characterization of IdleTones in 2nd-Order BandpassSigma–Delta Modulators—A 0.8 μmCMOS Switched-Current Case
Study,” Proc. IEEE Int. Sym. onCircuits and Systems, ISCAS 2001,pp. 774–777 (2001).
[17] M. Kozak and I. Kale,Oversampled Delta-Sigma Modulators:Analysis, Applications and NovelTopologies (Kluwer AcademicPublishers, Dordrecht, The Netherlands,2003).
[18] G. I. Bourdopoulos, A.Pnevmatikakis, V. Anastassopoulos, andT. L. Deliyannis, Delta-SigmaModulators: Modeling, Design andApplications (Imperial College Press,London, UK, 2003.
[19] R. C. Ledzius and J. Irwin, “TheBasis and Architecture for the Reductionof Tones in a Sigma–Delta DAC,” IEEETrans. on Circuits and Systems - II,Analog and Digital Signal Processing,vol. 40 (1993).
[20] J. A. S. Angus, “The Effect ofNoise Transfer Function Shape on IdleTones in Sigma–Delta Modulators,”presented at the 118th Convention of theAudio Engineering Society, J. AudioEng. Soc. (Abstracts), vol. 53, p. 694(2005 Jul./Aug.), convention paper6450.
[21] P. A. G. Jespers, IntegratedConverters: D to A and A to DArchitectures, Analysis and Simulation(Oxford University Press, Oxford, UK,2001).
[22] E. Perez Gonzalez and J. D.Reiss, “Idle Tone Behavior inSigma–Delta Modulation,” AudioEngineering Society 122nd ConventionPapers CD-ROM (2007 May), conven-tion paper 7108 in AES E-Library<www.aes.org/e-lib>.
[23] C. Dunn and M. Sandler, “AComparison of Dithered and ChaoticSigma–Delta Modulators,” J. AudioEng. Soc., vol. 44, pp. 227–244 (1996).
[24] J. M. de la Rosa, B. Perez-Verdu, F. Medeiro, R. del Rio, and A.Rodriguez-Vazquez, “Effect of Non-linear Settling Error on the HarmonicDistortion of Fully-DifferentialSwitched-Current Bandpass Sigma–Delta Modulators,” Proc. IEEEInternational Symposium on Circuitsand Systems, ISCAS 2001, pp.340–343 (2001).
[25] S. R. Norsworthy, I. G. Post,and H. S. Fetterman, “A 14-Bit 80-kHzSigma–Delta A/D Converter:Modeling, Design and Performance
Evaluation,” IEEE J. Solid-StateCircuits, vol. 24, pp. 256–266 (1989).
[26] F. Op't Eynde, P. Meulemans, F.Heyrman, B. Maes, and W. Sansen, “ACalculation Method to Predict In-BandHarmonic Distortion of Sigma–DeltaD/A Converters,” Proc. IEEE Int. Sym.on Circuits and Systems, pp. 671–674(1989).
[27] V. F. Dias, G. Palmisano, and F.Maloberti, “Harmonic Distortion in SCSigma–Delta Modulators,” IEEETrans. on Circuits and Systems I:Fundamental Theory and Applications,vol. 41, pp. 326–329 (1994).
[28] R. T. Baird and T. S. Fiez,“Linearity Enhancement of MultibitSigma–Delta A/D and D/A ConvertersUsing Data Weighted Averaging,”IEEE Trans. on Circuits and Systems II:Analog and Digital Signal Processing,vol. 42, pp. 753–762 (1995).
[29] S. P. Lipshitz and J.Vanderkooy, “Why Professional 1-BitSigma–Delta Conversion Is a BadIdea,” presented at the AudioEngineering Society 109th Convention,J. Audio Eng. Soc. (Abstracts), vol. 48,p. 1099 (2000 Nov.), convention paper5188.
[30] J. D. Reiss and M. Sandler,“Dither and Noise Modulation inSigma–Delta Modulators,” presentedat the Audio Engineering Society115th Convention, J. Audio Eng. Soc.(Abstracts), vol. 51, p. 1239 (2003Dec.), convention paper 5935.
[31] R. Schreier and G. C. Temes,Understanding Delta-Sigma DataConverters (John Wiley and Sons,Hoboken, NJ, USA, 2005).
[32] O. Feely and L. O. Chua, “TheEffect of Integrator Leak in S-DModulation,” IEEE Trans. on Circuitsand Systems, vol. CAS-38, pp.1293–1305 (1991).
[33] O. Feely and L. O. Chua,“Nonlinear Dynamics of a Class ofAnalog-to-Digital Converters,” Int. J.Bifurcation and Chaos, vol. 2, pp.325–340 (1992).
[34] O. Feely and L. O. Chua,“Multilevel and Non-IdealQuantization in Sigma–DeltaModulation,” Int. J. of Circ. Theoryand Appl., vol. 21, pp. 61–83 (1993).
[35] O. Feely, “A TutorialIntroduction to Non-Linear Dynamicsand Chaos and their Application to
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
➥
SDM_Reiss.qxd 2/6/08 10:41 AM Page 13

64 J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February
Sigma–Delta Modulators,” Int. J. Circ.Theory and Appl., vol. 25, pp. 347–367(1997).
[36] O. Feely, “Nonlinear Dynamicsof Sigma–Delta Modulators and Phase-Locked Loops,” Queen MaryUniversity of London, London, UK,invited talk (2002 Jan.).
[37] R. Farrell and O. Feely,“Bounding the Integrator Outputs ofSecond Order Sigma–Delta Mod-ulators,” IEEE Trans. on Circuits andSystems, Part II: Analog and DigitalSignal Processing, vol. 45, pp.691–702 (1998).
[38] L. Risbo, “Sigma–DeltaModulators—Stability Analysis andOptimization,” PhD Thesis, ElectronicsInstitute, Technical University of Denmark, 1994, pp. 179, (1994) <http://eivind.imm.dtu.dk/publications/phdthesis.html>.
[39] R. Schreier, M. Goodson, and B.Zhang, “An Algorithm for ComputingConvex Positively Invariant Sets forDelta-Sigma Modulators,” IEEE Trans.on Circuits and Systems I: Fundamen-tal Theory and Applications, vol. 44,pp. 38–44 (1997).
[40] B. Zhang, M. Goodson, and R.Schreier, “Invariant Sets for GeneralSecond-Order Lowpaws Delta-SigmaModulators with DC Inputs,” Proc.ISCAS, pp. 1–4 (1994).
[41] M. Goodson, B. Zhang, and R.Schreier, “Proving Stability of Delta-Sigma Modulator Using InvariantSets,” Proc. ISCAS, pp. 633–636(1995).
[42] S. Hein and A. Zakhor, “On theStability of Sigma–Delta Modulators,”IEEE Trans. Signal Processing, vol.41, pp. 2322–2348 (1993).
[43] H. Wang, “On the Stability ofThird-Order Sigma–Delta Modu-lation,” Proc. ISCAS, pp. 1377–1380(1993).
[44] J. Zhang, P. V. Brennan, D. Jiang, E. Vinogradova, and P. D.Smith, “Stable Boundaries of a Third-Order Sigma–Delta Modulator,” Proc.Southwest Symp. on Mixed-SignalDesign, pp. 259–262 (2003).
[45] J. Zhang, P. V. Brennan, D. Jiang, E. Vinogradova, and P. D.Smith, “Stability Analysis of a Sigma–Delta Modulator,” Proc. Int. Symp. onCircuits and Systems, ISCAS, pp. I-961–I-964 (2003).
[46] J. Zhang, P. V. Brennan, P. D.Smith, and E. Vinogradova, “BoundingAttraction Areas of a Third-OrderSigma–Delta Modulator,” Proc. Int.Conf. on Communications, Circuits andSystems, ICCCAS, pp. 1377–1381(2004).
[47] P. Steiner and W. Yang, “AFramework for Analysis of High-OrderSigma–Delta Modulators,” Circuits andSystems II: Analog and Digital SignalProcessing, IEEE Trans., pp. 1–10(1997).
[48] P. Ste iner and W. Yang,“Stability of High Order Sigma–
Delta Modulators,” Proc. IEEE Int.Symp. on Circuits and Systems,ISCAS’96, pp. 52–55 (1996).
[49] N. Wong and T.-S. Tung-SangNg, “DC Stability Analysis of High-Order, Lowpass Sigma-Delta Modu-lators With Distinct Unit Circle NTFZeros,” IEEE Trans. On Circuits AndSystems-II: Analog And Digital SignalProcessing, vol. 50 (2003).
[50] V. Mladenov, H. Hegt, and A. V.Roermund, “On the Stability Analysis ofHigh Order Sigma-Delta Modulators,”Analog Integrated Circuits and SignalProcessing, vol. 36 (2003).
Joshua D. Reiss was born in 1971,and is a Lecturer with the Centre forDigital Music and the Digital SignalProcessing group in the ElectronicEngineering department at QueenMary, University of London. He hasbachelor’s degrees in both physicsand mathematics, and received hisPh.D. in physics from the GeorgiaInstitute of Technology, specializingin the analysis of chaotic time series.
In June of 2000, he accepted aresearch position in the Audio SignalProcessing research lab at King’sCollege, London, and moved toQueen Mary in 2001. He made thetransition from chaos theory to audioprocessing through his work onsigma–delta modulators, which haslead to a nomination for a best paperaward from the IEEE, as well as a UKpatent. His work also includes signifi-cant contributions to the fields of
music retrieval and processing, audioeffects, satellite navigation, andnonlinear dynamics.
Reiss is very active in the AudioEngineering Society, including beinga member of the Review Board forthe Journal and vice chair of theTechnical Committee on High-Resolution Audio. He was on theOrganizing Committee of DAFx2003and MIREX2005 and was recentlyprogram chair for the 2005International Conference on MusicInformation Retrieval and generalchair of the 2007 AES InternationalConference on High ResolutionAudio. As coordinator of theEASAIER project, he leads an inter-national consortium of seven partners working to improve accessto sound archives in museums,libraries, and cultural heritage institutions.
UNDERSTANDING SIGMA–DELTA MODULATION: The Solved and Unsolved Issues
THE AUTHOR
SDM_Reiss.qxd 2/6/08 10:41 AM Page 14