Uncertainties, Error Types and Error Propagation …...Random Errors and Systematic Errors. Random...
64
Prof. Dr.-Ing. habil. Hermann Lödding Prof. Dr.-Ing. Wolfgang Hintze © PD Dr.-Ing. habil. Jörg Wollnack EP.1 30.04.2015 Uncertainties, Error Types and Error Propagation Analysis
Transcript of Uncertainties, Error Types and Error Propagation …...Random Errors and Systematic Errors. Random...

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.1 30.04.2015
Uncertainties,
Error Types
and
Error Propagation Analysis

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.2 30.04.2015
Physical measured values
are in principle
occupied with uncertainties!
Problem Definition

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.3 30.04.2015
If one measures e.g. the lengths of a production series
of lengths scales, then coincidental errors can have
been submitted to the set of scales
(coincidental production errors),
coincidental errors of the individual measuring
(Measurement noise or surface roughness at the individual) and
a systematic error of all individuals
(object temperatures differ constantly from the standard temperature).
Didactic Example for Uncertainties

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.4 30.04.2015
An error is a bound on the precision and accuracy
of the result of a measurement.
These can principal be classified into two types:
Random Errors and Systematic Errors.
Random Errors are caused by inherently unpredictable
fluctuations in the readings of a measurement apparatus,
whereas Systematic Errors are always constant under the same
physical conditions (repeatability).
If the values of the systematic errors can be identified,
then it can be eliminated,
if the (sensor) system model is complete.
We typically know only the ranges
within the true values lies.
Uncertainties I

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.5 30.04.2015
The central limit theorem states that if the sum of
independent identically distributed random variables has a
finite variance, then it will be approximately normally
distributed (Gaussian distribution).
Formally, a central limit theorem is any of a set of weak-
convergence results in probability theory.
They all express the fact that any sum of many independent
and identically-distributed random variables will converge to
be distributed according to a particular "attractor distribution“
(normally distribution).
The Central Limit Theorem I

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.6 30.04.2015
if are randomly independent variables with existing mean
average value and variance, then the standardized sum
Xk
U
X
X
n
k X
k
n
k X
k
n
k
k
1
2
1
d i
converges for to a normalized normal distribution
(under weak restrictions1 to the distributions).
n
1 to below restricts variance und up limited absolute moments 3rd order
The Central Limit Theorem II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.7 30.04.2015
xI
xS
Saturation behavior Dead zone
Sensor Characteristics
I := true Value
S:= Sensor Value ideale Kennlinie ideal characteristic line Hysteresis behavior
Neukurve Initial curve
Stationary
curve
x ySensor/System
physikalischeGröße
Sensor-Meßwert
Physical
Value
Sensor
measured
value

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.8 30.04.2015
xI
xS
stationary
Model
characteristic
true
stationary
characteristic
systematic
Error
Systematic Error

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.9 30.04.2015
Additives Random Errors
xI
xS
stationary
Model
characteristic
true stationary
characteristic
K - KB
K +
- +
x
pK
K -
KB
K +
- +
x
pK

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.10 30.04.2015
xI
xS
x0I
xMin xMax
regression
straight
line
lower and upper
regression
straight lines
Regression Straight Line as Linear Approximation I
lower and upper
straight lines

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.11 30.04.2015
x x x x x x x x xS I S I SL I IMin I IMaxMax ( ) ( ) ,m rSystematic Error
x x x m x xSL I S S I 0I( ) 0 d iRegression line
The sensor behaviour and with that the parameters of the
parametric sensor model are generally dependent on
further physical influence quantities.
Regression Straight Line as Linear Approximation II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.12 30.04.2015
• Temperature
• Air pressure
• Humidity
• Supply voltage
• Tolerances caused by production of function defining
sensor components
• Electromagnetic Fields
• Mechanical forces etc..
Sensor Influence Effects
This influence effects not
contributes insignificantly
to the systematic and
random measuring errors of
a sensor.

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.13 30.04.2015
The transient response
of a sensor Systems generally differs
from the ideal linear, time-invariant behaviour.
• Linearity and offset error,
• Temperature drift with zero point and gain drift,
• Transient characteristic with the frequency and phase response model
or under assumption of a defined transient characteristic (e.g. low-pass
of n-th order) we use the group delay and the impulse rise time model,
• Noise behavior and dynamics of the system.
One distinguishes the following error classes:
Sensor/System Response Characteristic

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.14 30.04.2015
: Input noise (random error)Xn
: systematic input errorx
A : Output noise (random error)ynA : systematic output errory
Uncertainties I
x=xI
xI
xM
y=yI
yMSystem
Eingangs-größen
Ausgangs-größen
nA
y ΔyA
+ +
nx
Δx
++
Input Output I := true Value
S:= Sensor Value

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.15 30.04.2015
M I xx x x n
A A
M I yy y y nA A
M M y( , ) xy f p x x n y n
A A
M y( , ) xy f p x x n y n
( , ) ( , ) y xf p x y n f p x x n
( , ) ( , ) y xy n f p x x n f p x
Uncertainties
Structure Uncertainties
Incremental Approach
Uncertainties II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.16 30.04.2015
( , ) ( , ) y xy n f p x x n f p x
Incremental Approach
( ) xy J x x
Linear approximation for systematic errors
Worst-Case-Analysis (x Values and signs unknown)
Known systematic errors can be corrected
if the model is known. Therefore only the unknown
systematic and coincidental deviations
of interest are.
Max
,m mn ny xJ p x x
Uncertainties III

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.17 30.04.2015
Max
,m mn ny xJ p x x
Uncertainties IV
Max
Max
0 , {1,..., } ,
,
m m
m mn n
n
y y m M
y
xJ p x x
Using the triangle inequality of the norm we get:
In a compact matrix notation we get for the worst case error:
, for
, for
M N
mn mn i j
M
m mn i
a a
b b
A A
b b

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.18 30.04.2015
Worst-Case-Analysis (x, p Values and signs unknown)
Max
, ,m mn n mn ny p xJ p x p J p x x
Uncertainties V

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.19 30.04.2015
( , , ) ( , , ) ( , , ) p x yJ p x y p J p x y x J p x y y 0
Linear approximation of the implicit model
f p x y 0( , , )
( , , ) ( , , ) y xJ p x y y J p x y x
1
( , , ) ( , , )
y xy J p x y J p x y x
p 0
1
( , , ) from left
yJ p x y
1
, with = ( , , ) ( , , )
y xy Q x Q J p x y J p x y
Uncertainties Implicit Model I

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.20 30.04.2015
1
, with = ( , , ) ( , , )
y xy Q x Q J p x y J p x y
Linear approximation for delta values
implicit Model
, with ( , ) xy Q x Q J p x explicit Model
Conclusion?
An implicit model can be transformed local (in linear approximation)
structurally to the explicit model.
Uncertainties Implicit Model II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.21 30.04.2015
Probability
of the
Worst Case Condition

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.22 30.04.2015
f f x x f xn i
i
n
( ) ( , , ) ( )x 1
1
FHG
IKJ
f ek
x
k
nk Xk
Xk( )x1
2
1
2
1
2
FHGIKJ
F
HGIKJ
1
2
1
1
1
2
1
2
b gn kk
nx
k
n
e
k Xk
Xk
FHGIKJ
FHG
IKJ
1
2
1
1
1
2
2
1
b gn kk
nx
e
i Xi
Xii
n
f q eX X n
kk
n q
k k
i
n
( , , )
FHGIKJ
1
2
1
1
1
2
2
1
b gq n q
k
n2
1
2
Worst-Case-Condition I
Central limit theorem
x qk X Xk k
At the
Worst Case border
Statistic independence of the values

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.23 30.04.2015
FHGIKJ
f q eX X n
kk
nnq
k k( , , )
1
2
1
1
1
2
2
b g e eab a b
c h
The probability of the appearance of the worst case condition fells
with a power law. Therefore the worst case condition can already
get truly at a relatively low number of influence variables only with
an "astronomically" low probability.
This is at least economically a far too expensive criterion!
f q eX X n
kk
n n q
k k( , , )
FHGIKJ
1
2
1
1
2
b g d i
Worst-Case-Condition II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.24 30.04.2015
Because of the low probability of the
worst case conditions frequently it is practicable,
to compute instead of the worst case error propagation
the Gaussian error propagation.
One assumes in the end that the systematic errors of a series are
influenced from a random process.
If this assumption does not make sense, then we can determine
only the systematic error and correct it or
we analyse it for the worst case condition.
Worst-Case-Bedingung III

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.25 30.04.2015
Error Propagation Analysis
of the
Uncertainties
of
Random Errors

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.26 30.04.2015
The probability of the occurrence of a
continuous signal value characterizes the
density function.
Random Signal
x t( )
t
stochastisch
f(x)
x
Dichtefunktionrandomly density function

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.27 30.04.2015
n - dimensional density function f f x xn( ) ( , , )x 1
Multidimensional Distribution and Density Function
n - dimensional distribution function
P X r X r F f f x x x xn n n n
rr n
( , , ) ( ) ( ) ( , , )1 1 1 1
1
z zz r x x
X r
d d d
1 1( ) d ( , , ) d d 1n
n nf f x x x x
x xMain topic

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.28 30.04.2015
( ) d ,n
n n
X XXE X x f x x n
Central moments of n-th order
Central Moments
X E X x f x x
za f ( ) d
Expected value / Average value

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.29 30.04.2015
1 1
1 1
( , , ) d dn n
k k k k n n
k k
E q X q x f x x x x
zz q x f x x x xk k n n
k
n
( , , )1 1
1
d d
zzq x f x x x xk k n n
k
n
( , , )1 1
1
d d
Expected value / Average value
1 1
n n
k k k k
k k
E q X q E X

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.30 30.04.2015
1 1
1 1
( , , ) d dn n
k k n n
k k
E X x f x x x x
zz x f x f x x xk n n
k
n
( ) ( )1 1
1
d d
Product Distribution of Independent Events
1 1
( ) dn n
k k k k
k k
E X x f x x

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.31 30.04.2015
Covariance of two Values
X X X XE X Xs t s ts t d i d i E X X X XX X X Xs t s tt s s t
E X X E X E X EX X X Xs t s tt s s t
E X X E X E Xx x x xs t s tt s s t
X X x xE X Xs t s ts t

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.32 30.04.2015
E q X q XX X1 1 2 2
2
1 2
LNM
OQP e j d ie j
q E X q q E X X q E XX X X X1
2
1
2
1 2 1 2 2
2
2
2
1 1 2 22 d i d id i d i
E Y Y q X q XX X
2
1 1 2 21 2
, e j d i
Covariance of a Superposition of two Values I
YY X X X X X Xq q q q 1
2
1 2 2
2
1 1 1 2 2 22 0
positive definit

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.33 30.04.2015
y q A q A A t t,
FHG
IKJFHGIKJq q
a a
a a
q
q1 2
11 12
21 22
1
2
b g
FHG
IKJq q
a q a q
a q a q1 2
11 1 12 2
21 1 22 2
b g
a q a q q a q q a q11 1
2
12 1 2 21 1 2 22 2
2 a q a q q a q11 1
2
12 1 2 22 2
22
YY X X X X X Xq q q q 1
2
1 2 2
2
1 1 1 2 2 22 0
YY
X X X X
X X X X
FHG
IKJq q
t 1 1 1 2
2 1 2 2
positive definit
Covariance of a Superposition of two Values II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.34 30.04.2015
A twice steadily differentiable implicit vector
mapping is available.
( , ) f x y 0
The Input have systematic and random errors
according to the super position: N R x x Δx x
Since each random process can be divided
in the kind: Rz
R R R R, with and z zz μ Δz μ E z E Δz 0
Therefore we get the relation:
N R N R( , ) x yf x Δx μ Δx y Δy μ Δy 0
Second order Statistics of Linear Vector Maps I

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.35 30.04.2015
Second order Statistics of Linear Vector Maps II
Via Taylor series round the central quantities we get:
0 0 R R R R( , ) ( , ) , withy xf x y J Δx J Δy R Δx Δy 0
0 0 0 0 0 N
0 N
( , ) , ( , ) , and
x y x
y
f fJ x y J x y x x Δx μ
x y
y y Δy μ
It is , so we further get : ( , ) f x y 0
R R R R( , )y xJ Δx J Δy R Δx Δy 0
If exist the Jacobian matrix , we get for the output: 1
yJ
1 1
R R R R( , ) , with yx y yx y xΔy Q Δx J R Δx Δy Q J J

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.36 30.04.2015
With the output second order statistics:
t
R R
t1 1
R R R R R R( , ) ( , ) yx y yx y
y y
Q Δx J R Δx Δy Q Δx J R Δx Δy
we get the average value operator after application
of the super position law to:
tt
R R R R
t1
R R R
t 1 t
R R R
1 t 1t
R R R R
( , )
( , )
( , ) ( , )
yx yx
y yx
yx y
y y
y y Q Δx Q Δx
J R Δx Δy Q Δx
Q Δx R Δx Δy J
J R Δx Δy R Δx Δy J
Second order Statistics of Linear Vector Maps III

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.37 30.04.2015
Since the residual term has a square convergence behavior,
we can neglect the fourth term opposite the second and
third term.
With the statement and the triangle inequality
of the norm we get the inequality for the criterion of first order:
t t tA B B A
1 t t t 1 t
R R R R
1 t t t 1 t
R R R R
t t
R R
( ) ( )
( ) ( )
y yx yx y
y yx yx y
yx yx
J R Δx Δx Q Q Δx R Δx J
J R Δx Δx Q Q Δx R Δx J
Q Δx Δx Q
Second order Statistics of Linear Vector Maps IV

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.38 30.04.2015
If this inequality is true, then we can describe the output
covariance matrix in linear approximation via:
t t t
R R R R yx yxy y Q Δx Δx Q
Because of the super position law of the average value
operator we get the transformation of the input and output
covariance's in linear approximation to:
t t t
R R R R yx yxy y Q Δx Δx Q
Second order Statistics of Linear Vector Maps V

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.39 30.04.2015
We can note this compactly via:
t
1
N N N N
t t
R R R R
, with
( , ) ( , ) and
,
y yx x yx
yx x y x y
y x
S Q S Q
f fQ x Δx μ y μ x Δy μ y μ
y x
S y y S Δx Δx
We use the fact that the norm is transposition invariant,
so we can transform the approximation criterion into
the relation:
1 t t t t
R R R R
1( )
2
y yx yx yxJ R Δx Δx Q Q Δx Δx Q
Second order Statistics of Linear Vector Maps VI

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.40 30.04.2015
Linear approximation of the vector mapping
permitted and residual term is negligible.
t ,Y yx X yxS Q S Q SZ
F
HGGG
I
KJJJ
Z Z Z Z
Z Z Z Z
m
m m m
1 1 1
1
s E Z Zmn m Z n Zm nZc he j d id io te je j
yxy Q x
Error Propagation of the Uncertainties I
Worst Case Analysis of the systematic errors
Max
m mn ny yxQ x
positive definit
Covariance Analysis of the random errors

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.41 30.04.2015
SZ Z
s Z Z
Z Z E Z Z
mn m n
m n m Z n Zm n
c he j b gb g d id io te je j
cov , ,
cov ,
Covariance Matrix
tY yx X yxS Q S Q
Generalized Gauss Error Propagation Law
Error Propagation of the Uncertainties II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.42 30.04.2015
1
= ( , , ) ( , , )
yx y xQ J p x y J p x y
( , )yx xQ J p x explicit Model
implicit Model
Correlation-free input errors (Special case: Gauss error propagation law)
E Y q E Xf
xE Xi Y k k k X
k
ni
k
k X
k
n
i k k
FHGIKJ
d i d i d i22
2
1
22
1
Yi
k
X
k
n
i
f
x
2
2
2
1
FHGIKJ
Error Propagation of the Uncertainties III

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.43 30.04.2015
Systematic errors determine the absolute errors
Random errors determine repetition accuracy
This applies to sensors and actuators as well as
machines.
Influence of the Uncertainties

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.44 30.04.2015
a) The procedure is consistent, since the output values can be
used with compositions as inputs. Second order statistics
serve thereby for the description the uncertainty of the values.
The density functions can be arbitrary, as long as their
average values and second order statistics exist.
b) For infinitesimal cross correlations of the uncertainties the
generalized error propagation law changes into the Gauss
error propagation law.
Generalized Gauss Error Propagation Law I
The generalized Gauss error propagation law has the
following important characteristics:

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.45 30.04.2015
( ) , with ( ) y f u u g x
( )( ) ( ( )) ,f g x f g x
Q J J Jx
f g
u
f
x
g
( )f g
x
f
u
g
x
Composition
Generalized chain rule
Jacobian Matrices
Generalized Gauss Error Propagation Law II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.46 30.04.2015
Correlation Coefficient and Covariance’s I
i j
X X
X X X X
i j
i j
i X j X
i X j X
i j
i i j j
i j
i j
X X E X X
E X E X
LNMOQP
cov ,c h d i e jd i e j2 2
Correlation coefficient
1 1 i j
Characteristics
0 , If between and
no deterministic relation exists.
i j i jx x

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.47 30.04.2015
S s rmn mn m nb gc h b gc h
rs
s s
smn
mn
mm nn
mn
m n
Evidence for linear dependences
of strongly correlated
output quantities only delivers
the cross correlation coefficients
if input covariance matrix
is free from cross correlations.
Correlation Coefficient and Covariance’s II
Characteristics

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.48 30.04.2015
The complete covariance matrices are not always known
in practice. The empirical average values and the variances
of the input quantities can, however, be determined.
We assume that the errors do not correlate with each other.
If there are, however, correlations exist,
then the calculated variance indicates an upper bound
for the variance appearing really.
We consequently lie at this assumption on the safe side.
Practical Procedure

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.49 30.04.2015
Estimated values are not always completely free of
subjective influences.
This is acceptable as long as no additional information is
available or these has to be determined only with
economically not acceptable effort.
Approaches for the Determination of Input Data I
• Repeatable, statistically independent measuring
The empirical average values and covariance’s are used as
estimated values.

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.50 30.04.2015
• Values from manufacturer data
Using manufacturer's indications values the nominal values should
be average values and the worst case values should be 3X ranges
of the probability density adopted as normal distributed.
This assumption is allowed since the input values are determined
by a large number of statistically independent effects and
therefore the validity of the central limit theorem is given.
Approaches for the Determination of Input Data II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.51 30.04.2015
• Input values to which only upper and lower limits are
known
If the distributions and central moments are not known, then
upper and lower limits in which the true values are should
defined. Moreover, it is assumed that the input data are
uncorrelated.
Approaches for the Determination of Input Data III

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.52 30.04.2015
• Single Values
The case can appear for single values that there are merely
literature values, values of a previous measuring or empirical
values are known (nature constants, material constants etc.).
These values then have to be accepted together with the
possibly existing details on the variance as estimated values.
An insignificant correlation is assumed with other data.
Approaches for the Determination of Input Data IV

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.53 30.04.2015
• Covariance’s
Data from different independent experiments being able to be
accepted as uncorrelated approximately.
• Random Disturbances and Series Characteristics
At the characterization of the behavior of a series we assume
that the random disturbances and series characteristic quantities
are free from correlations provided that no information about
possible correlations are known.
Approaches for the Determination of Input Data V

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.54 30.04.2015
• Inputs with Small Influence
Insensitive or opposite other very exact input values can be
selected as constant.
Approaches for the Determination of Input Data VI

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.55 30.04.2015
Error Propagation Analysis
of a
SCARA

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.56 30.04.2015
2D SCARA Kinematics
xTCP
i
ai
Gi
a
yTCP
i
c
xB
yB
Fi
Wollnack

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.57 30.04.2015
B
TCP
B
TCP
cos( ) cos( )
sin( ) sin( )
i i i
i i ii
i
x c
y a
z
G a G
G a G
TCP
TCP
B
0
B
0
0
360
xi
i yi
zi i i i
F
F
F G a F
F
Kinematic Forward Transform of a SCARA

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.58 30.04.2015
0
cos( ) cos( )
sin( ) sin( )
0
0
360
x
y
z
x c
y a
z z
G a G
G a G
F
F
F G a F
Kinematic Forward Transform of a SCARA (kompakt)

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.59 30.04.2015
cos( ) cos( )
sin( ) sin( )
sin( ) sin( ) 0 0
cos( ) cos( ) 0 0
0 0 1 0
0 0 0 0
0 0 0 0
0 0 0 1
x y z
x y z
x y z
c a
x y z
z
G a GF F F
G a G
G a G
G a G
F F F
G a F
p
x
J
0 0
J
Jacobian Matrices of a SCARA

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.60 30.04.2015
cos( ) cos( )
sin( ) sin( )
sin( ) sin( ) 0 0
cos( ) cos( ) 0 0
0 0 1 0
0 0 0 0
0 0 0 0
0 0 0 1
x
y
z
x
y
z c
a
z
G a G
G a GF
F
F
G a G
G a G G
a
F
0 0
-Error Propagation of a SCARA

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.61 30.04.2015
cos( ) cos( )
sin( ) sin( )
sin( ) sin( ) 0 0
cos( ) cos( ) 0 0
0 0 1 0
0 0 0 0
0 0 0 0
0 0 0 1
x
y
z
x
y
z c
a
z
G a G
G a G
F
F
F
G a G
GG a G
a
F
0 0
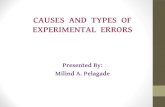
Worst Case Error Propagation of a SCARA I

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.62 30.04.2015
-1000-600-20020060010004000-400-8000,00E+001,00E-012,00E-013,00E-01
400
-400
0
-600
-600
0
0,3
0
mm
mm
mm
Worst Case Error Propagation of a SCARA II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.63 30.04.2015
t ,Y yx X yxS Q S Q
sin( ) sin( ) 0 0
cos( ) cos( ) 0 0
0 0 1 0
0 0 0 0
0 0 0 0
0 0 0 1
G a G
G a G
yx xQ J
Covariance Error Propagation of a SCARA
SZ Z
s Z Z
Z Z E Z Z
mn m n
m n m Z n Zm n
c he j b gb g d id io te je j
cov , ,
cov ,

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
EP.64 30.04.2015
END