UI Sensores
11
INTERFACES INSTITUTO TECNOLÓGICO SUPERIOR ZACATECAS NORTE SEDE MIGUEL AUZA INGENIERIA EN SISTEMAS COMPUTACIONA LES INTERFACES
Transcript of UI Sensores

5/13/2018 UI Sensores - slidepdf.com
http://slidepdf.com/reader/full/ui-sensores 1/11
INTERFACES
INSTITUTO TECNOLÓGICO SUPERIOR ZACATECAS NORTE
SEDE MIGUEL AUZA
INGENIERIA EN SISTEMAS COMPUTACIONALES
INTERFACES

5/13/2018 UI Sensores - slidepdf.com
http://slidepdf.com/reader/full/ui-sensores 2/11
INTERFACES
1 SENSORES
Es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de
instrumentación, y transformarlas en variables eléctricas.[1]
1.1 SENSORES OPTICOS
En electrónica se utiliza como sensores ópticos ciertos componentes sensibles a la luz, en el
sentido que modifican su comportamiento eléctrico según tengan luz incidente o no.
Un sensor óptico es un dispositivo que convierte los rayos de luz en señales electrónicas. Similar a
una fotorresistencia, que mide la cantidad física de la luz y la traduce en una forma leído por el
instrumento. Por lo general, el sensor óptico es parte de un sistema mayor integración de un
dispositivo de medición, una fuente de luz y el sensor sí mismo. Esto es generalmente relacionado
con una activación eléctrica, que reacciona a un cambio en la señal en el sensor de luz.[1]
Cuando hablamos de sensores ópticos nos referimos a todos aquellos que son capaces de detectar
diferentes factores a través de un lente óptico. Para que podamos darnos una idea de lo que nos
referimos, debemos decir que un buen ejemplo de sensor óptico es el de los mouse de
computadora, los cuales mueven el cursor según el movimiento que le indicamos realizar.[1]
Figura 1. Sensores ópticos
Ventajas:
Los sensores ópticos, presentan importantes ventajas cuando lo que se desea es determinar
propiedades físicas o químicas:
Es un método no destructivo y no invasivo.
Ofrece posibilidades de integración en sistemas más complejos.
Bajo coste y tecnología bien establecida.
Posibilidades de control a distancia de lugares poco accesibles físicamente.
Capacidad de conformar redes espaciales de sensores para el control de parámetros en
grandes superficies.[4]
5/13/2018 UI Sensores - slidepdf.com
http://slidepdf.com/reader/full/ui-sensores 3/11
INTERFACES
Desventajas:
Distancia de detención corta
Son muy sensible a factores ambientales como la humedad
No selecciona el objeto a detectar.[4]
1.1.1 TIPOS
Los sensores ópticos los formas los fotointerruptores de barrera, reflectivos y los enconders
ópticos.
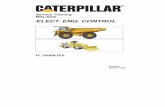
Foto-interruptores de Barrera.
Están formados por un emisor de infrarrojos y un fototransistor separados por una
abertura donde se insertará un elemento mecánico que producirá un corte del haz. La
salida será 0 o 1.[2]
Figura 2. Foto Interruptores de barrera
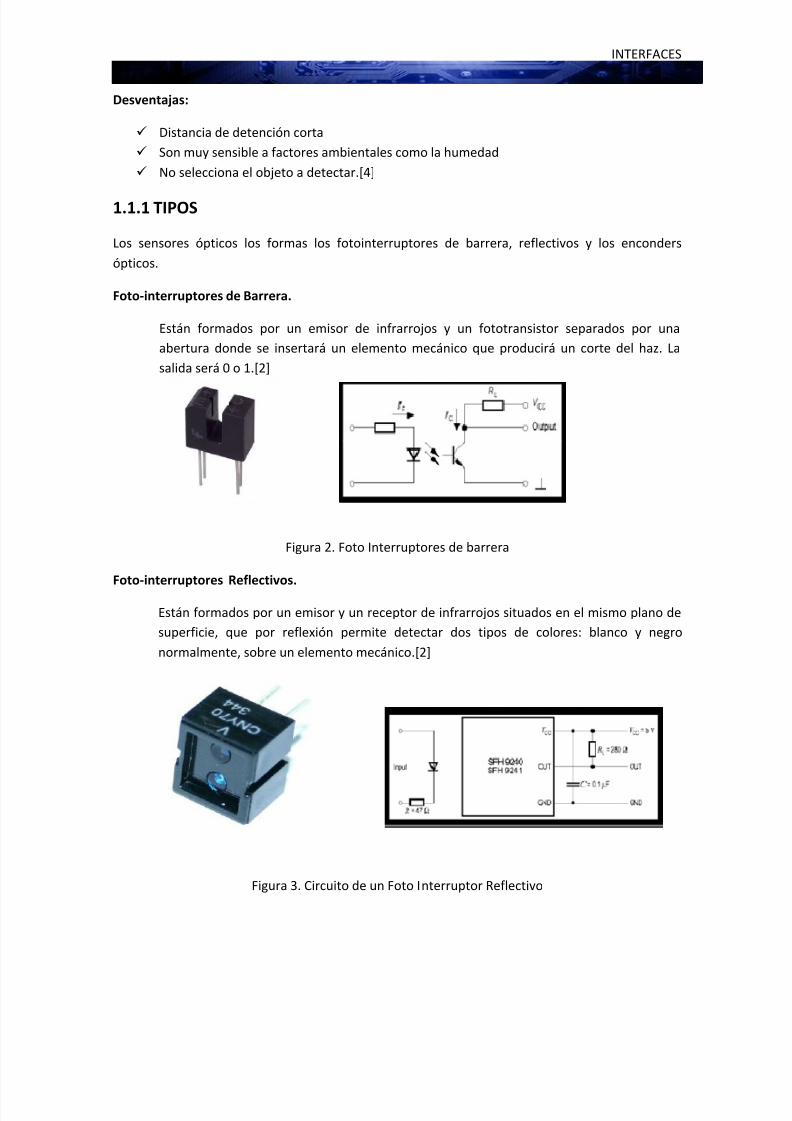
Foto-interruptores Reflectivos.
Están formados por un emisor y un receptor de infrarrojos situados en el mismo plano de
superficie, que por reflexión permite detectar dos tipos de colores: blanco y negro
normalmente, sobre un elemento mecánico.[2]
Figura 3. Circuito de un Foto Interruptor Reflectivo

5/13/2018 UI Sensores - slidepdf.com
http://slidepdf.com/reader/full/ui-sensores 4/11
INTERFACES
Encoders Ópticos.
Con los foto-interruptores y los reflectivos se puede montar los encoders ópticos,
formados por un disco que tiene dibujado segmentos para ser detectados por los
sensores. Existen dos tipos de encoders: los Encoders Incrementales y Encoders
Absolutos.[2]
Figura 4. Encoders óptico. Encoders Incrementales. Permiten que un sensor óptico detecte el número de segmentos que
dispone el disco y otro sensor detecte la posición cero de dicho disco. [4]
Figura 5. Encoder incremental
Encoders Absolutos: Permiten conectar la posición exacta en cada momento sin tener que dar una
vuelta entera para detectar el punto cero del disco. La diferencia es que se necesitan varios
sensores ópticos y el disco debe de tener una codificación tipo Manchester.[2]

5/13/2018 UI Sensores - slidepdf.com
http://slidepdf.com/reader/full/ui-sensores 5/11
INTERFACES
Figura 6. Funcionamiento de un encoder absoluto
1.1.2 FUNCIONAMIENTO
Principio básico de funcionamiento:
Emisión y recepción de luz. Tanto en el emisor como en el receptor existen pequeñas lentes
ópticas que permiten concentrar el haz de luz y se encuentra en un mismo encapsulado. El
primero suele ser un diodo emisor de luz (LED) y el receptor un fotodiodo. Generalmente trabajan
por reflexión de la luz, es decir, el emisor emite luz y si esta luz es reflejada por un objeto, el
receptor lo detecta.[4]
1.1.3 CARACTERÍSTICAS
Algunas características más importantes de los sensores ópticos son los siguientes:
La luz como medio detector. Los sensores ópticos utilizan principalmente los siguientes
componentes emisores:
LED de luz roja: luz visible, óptima como ayuda de alineación y para el ajuste de sensor.[1]
LED Infrarrojo (IR): radiación invisible con elevada energía.[1]
Laser de luz roja: la luz visible, óptima para la detección de piezas pequeñas y elevados alcances
debido a las propiedades físicas del láser.[1]
Refracción de luz
Conducción de luz reflexión total
Distancia de actuación.
Una de las características de un sensor óptico es su capacidad para medir los cambios de las vigas
de uno o más luz. Este cambio es más a menudo en torno a las modificaciones de la intensidad de
5/13/2018 UI Sensores - slidepdf.com
http://slidepdf.com/reader/full/ui-sensores 6/11
INTERFACES
la luz. Cuando se produce un cambio de fase, el sensor de luz actúa como un disparador
fotoeléctrico, ya sea aumentando o disminuyendo la producción eléctrica, en función del tipo de
sensor.[1]
1.1.4 MODO DE COMUNICACIÓN
El modo de operación de los sensores ópticos varía de acuerdo a su tipo, a continuación
mencionaremos estas comunicación es en los tipos de sensores ya descritos.[4]
Barrera de luz.
Rango amplio (20m).
El alineamiento es crítico.
Retro-reflectivos (Réflex)
Rango 1-3 m.
Popular y barato.
Reflectivo Difuso
Rango 12-300 mm
Barato y fácil de usar.
1.2 SENSORES DE APROXIMACIÓNEl sensor de proximidad es un transductor que detecta objetos o señales que se encuentran cerca
del elemento sensor.
Figura 7. Sensores de aproximación
1.2.1 TIPOSExisten varios tipos de sensores de proximidad según el principio físico que utilizan. Los mas
comunes son:
Los detectores capacitivos.
Los detectores inductivos

5/13/2018 UI Sensores - slidepdf.com
http://slidepdf.com/reader/full/ui-sensores 7/11
INTERFACES
Sensor de fin de carrera.
Sensores ultrasónicos.
Sensor Magnético
Fotoeléctricos
Sensor de humedad[4]
1.2.1 FUNCIONAMIENTO
El funcionamiento de los sensores de aproximación dependen de su tipo y aplicación, a
continuación se describe el funcionamiento de los sensores de aproximación más utilizados.[3]
Sensor inductivo.
Los sensores inductivos de proximidad han sido diseñados para trabajar
generando un campo magnético y detectando las pérdidas de corriente
de dicho campo generadas al introducirse en él los objetos de detección
férricos y no férricos.[3]
Sensor capacitivo.
Este tipo de transductor trabaja con un campo electrostático. Al
aproximarse un objeto (conductor o no conductor, en forma líquida o
sólida) se produce un cambio en el campo electrostático alrededor del
elemento sensor. Este cambio es detectado y enviado al sistema de
detección.[3]
El sistema de detección típico está formado por una sonda, un oscilador, un rectificador,
un filtro y un circuito de salida.
Cuando un objeto se aproxima al sensor la sonda aumenta su capacitancia y activa el
oscilador provocando que éste dispare el circuito de salida.[3]
Figura 8. Sensor capacitivo.

5/13/2018 UI Sensores - slidepdf.com
http://slidepdf.com/reader/full/ui-sensores 8/11
INTERFACES
Sensor de fin de carrera.
Basan la detección en el contacto mecánico del elemento a detectar con una parte del
sensor (pulsador, palanca, etc). Este contacto mecánico produce la apertura o cierre de un
interruptor.[3]
Sensor infrarrojo.
El receptor de rayos infrarrojos suele ser un fototransistor o un
fotodiodo. El circuito de salida utiliza la señal del receptor para
amplificarla y adaptarla a una salida que el sistema pueda
entender. La señal enviada por el emisor puede ser codificada
para distinguirla de otra y así identificar varios sensores a la vez.
Esto es muy utilizado en la robótica en casos en que se necesita tener más de un emisor
infrarrojo y solo se quiera tener un receptor.[3]
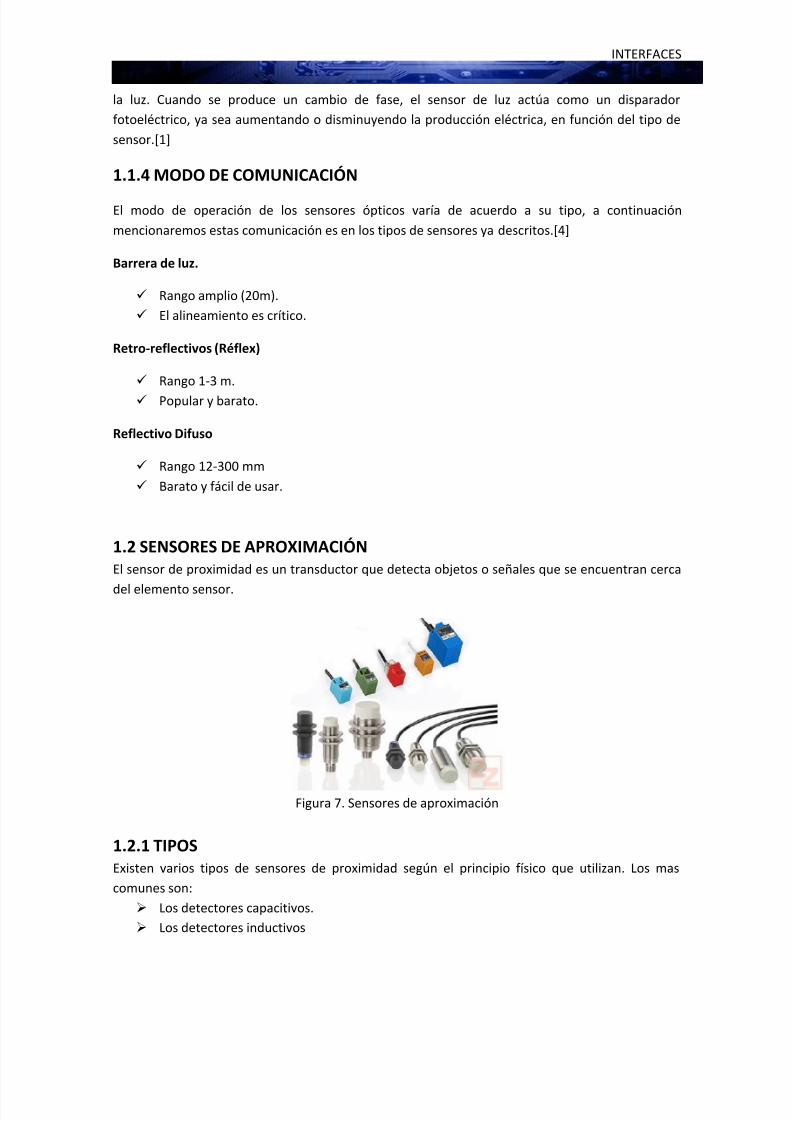
Sensor Ultrasónico.
También se denominan fotocélulas. Este tipo de transductor
trabaja con un emisor y detector de luz, como rayos infrarrojos.
Cuando un objeto refleja o interrumpe la luz del emisor hacia el
receptor, éste la censa y activa la etapa de control.[3]
El sistema de detección típico está formado por un transmisor de luz, una etapa de
control, un receptor de luz y un circuito de salida.[3]
Por lo general el transmisor está conectado a una etapa de control que decide laactivación de la transmisión e inclusive puede generar pulsos de frecuencia constante que
hacen la detección del sensor más robusta.[3]
5/13/2018 UI Sensores - slidepdf.com
http://slidepdf.com/reader/full/ui-sensores 9/11
INTERFACES
Figura 9.Sensor U9ultrasónico
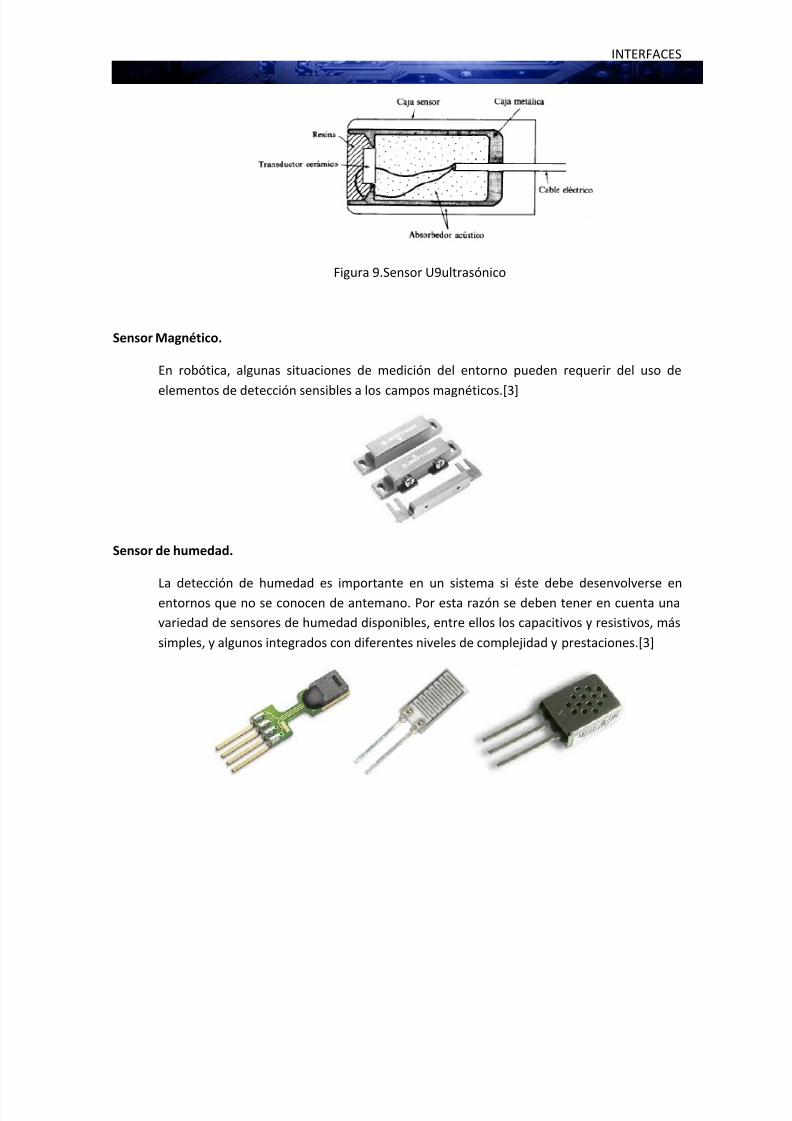
Sensor Magnético.
En robótica, algunas situaciones de medición del entorno pueden requerir del uso de
elementos de detección sensibles a los campos magnéticos.[3]
Sensor de humedad.
La detección de humedad es importante en un sistema si éste debe desenvolverse enentornos que no se conocen de antemano. Por esta razón se deben tener en cuenta una
variedad de sensores de humedad disponibles, entre ellos los capacitivos y resistivos, más
simples, y algunos integrados con diferentes niveles de complejidad y prestaciones.[3]

5/13/2018 UI Sensores - slidepdf.com
http://slidepdf.com/reader/full/ui-sensores 10/11
INTERFACES
1.2.3 CARACTERÍSTICASAlgunas características importantes que presentan la mayoría de los sensores de proximidad más
usuales (inductivos y capacitivos) son:
Sensores capacitivos: Tipo de sensor Rosca M6, M8,...
Distancia de detección nominal mm,m
Rango de detecciónFrecuencia de detección Hz (500Hz)
Tipo de salida Transistor, Relé
Material de la carcasa Plástico, PVC, etc.
Dimensiones Diámetro x longitud (M12x30mm)
Tensión de operación V (10-30V DC) (20-300 AC)
Temperatura de trabajo ° centígrados (-25 + 55°C)
Objeto detectable estándar Acero (12x12x1mm)
Consumo nominal ma (12 ma)
Protección IP
Conexión Cable 2m, 3m,...
Peso gr
Sensores inductivos
Tipo de sensor Rosca M12, M18, M30,...
Distancia de detección nominal mm +-x%(3mm +-10%)
Rango de detección mm (0-2mm)
Frecuencia de detección Hz (500Hz)
Objeto detectable estándar Acero (12x12x1mm)
Histéresis <x% del rango de medida (<20% del rango)
Tipo de salida ma (50, 100, 200 ma)
Consumo nominal ma (0.8 ma)
Material de la carcasa Acero, latón, níquel, etc.
Protección IP
Dimensiones Diámetro x longitud (M12x30mm)
Conexión Cable 2m, 3m,...
Tensión de operación V (10-30V DC)
Temperatura de trabajo ° centígrados (-25 + 55°C)
[6]

5/13/2018 UI Sensores - slidepdf.com
http://slidepdf.com/reader/full/ui-sensores 11/11
INTERFACES
1.2.4 MODO DE COMUNICACIÓN
Sensor Capacitivo.
La distancia de actuación en determinados materiales, pueden por ello, regularse
mediante el potenciómetro.
Los detectores capacitivos están construidos en base a un oscilador RC. Debido a la
influencia del objeto a detectar, y del cambio de capacitancia.[5]
Figura 10. Estructura de un sensor capacitivo
Sensor inductivo.
Los sensores inductivos de proximidad han sido diseñados para trabajar generando un
campo magnético y detectando las pérdidas de corriente de dicho campo generadas al
introducirse en él los objetos de detección metálicos y no metálicos.[5]
El sensor consiste en una bobina con núcleo de ferrita, un oscilador, un sensor de nivel de
disparo de la señal y un circuito de salida. Al aproximarse un objeto “metálico” o no
metálico, se inducen corrientes de histéresis en el objeto. [5]
Figura 11. Estructura de un Sensor inductivo