...Insensitive - Jann Arden Insensitive - Jann Arden - Page 2 Insensitive - Jann Arden - Page 3 ...

Two-wavelength sinusoidal phase/modulatinglaser-diode interferometer insensitive toexternal disturbances
Osami Sasaki, Hiroyuki Sasazaki, and Takamasa Suzuki
We describe a two-wavelength laser-diode interferometer that is insensitive to external disturbances suchas fluctuations in the wavelength of the laser diode and mechanical vibrations of the optical components.In sinusoidal phase-modulating interferometry this insensitivity is easily obtained by controlling theinjection current of the laser diode with a feedback control system. Using an equivalent wavelength of 152pum provided by two single-frequency laser diodes, we can measure the distance, rotation angle, andsurface profile measurements with great accuracy.
1. Introduction
Two-wavelength interferometry is used to measuredisplacements larger than a wavelength of light." Laser diodes are able to provide different opticalwavelengths more inexpensively than any other laser.Two-wavelength interferometers using laser diodesare reported in Refs. 3 and 4. In Ref. 3 a laser diodeproduces two different wavelengths by switching theinjection current between two levels, and the twowavelengths are time multiplexed. In Ref. 4 the twowavelengths are assigned to the two single-frequencylaser diodes, and the directions of polarization of thetwo laser beams are perpendicular to each other, sothat the two interference signals are distinguished.To obtain the phase of an interference signal in realtime with electronic hardware, sinusoidal phase mod-ulation is introduced by using a vibrating mirror.
We also present a two-wavelength interferometerusing two single-frequency laser diodes. However,sinusoidal phase-modulating (SPM) interferometry5' 6
and feedback control of injection currents of the twolaser diodes for eliminating external disturbances7
are used. Sinusoidal phase modulation is created bymodulating the injection current of the laser diodewith a sinusoidal wave. Two different frequencies ofsinusoidal phase modulation are assigned to the twolaser diodes so that the two interference signals can
The authors are with Niigata University, Faculty of Engineer-ing, 8050 Ikarashi 2, Niigata-shi, Japan.
Received 10 September 1990.0003-6935/91/284040-06$05.00/0.0 1991 Optical Socioty of America.
be distinguished. The wavelength of laser diodeschanges with temperature. The change in the wave-length and vibrations of optical components cause thefluctuations in the phase of the interference signal.Shearing interferometry is useful for eliminatingthese fluctuations. Shearing interferometry, how-ever, cannot be applied to laser-diode interferometerswhere phase modulation is generated by modulatingthe injection current of a laser diode, since laser-diodeinterferometers need an optical path difference ofmore than a few centimeters. The fluctuations causedby external disturbances are reduced by controllingthe injection current with a simple feedback controlsystem in a laser-diode SPM interferometer. Thisfeedback control enables us to measure displace-ments with great accuracy without suffering fromexternal disturbances.
In Section II SPM interferometry using a laserdiode is explained. In Section III the principle of thefeedback control system for eliminating external dis-turbances is described, and an SPM interferometerwith this feedback control system is described. Atwo-wavelength interferometer using the techniquesdescribed in Sections II and III is described in SectionIV. The measurement results of distances, rotationangles, and surface profiles are described in SectionV.
II. Sinusoidal Phase Modulation in a Laser-DiodeInterferometer
A. Interference Signal
Let us consider a Twyman-Green-type interferome-ter that results from removing the feedback control-
4040 APPLIED OPTICS / Vol. 30, No. 28 / 1 October 1991

and Eq. (4) becomes
S(t) = cos[a - (2wm/Xo2 )1AX(t)],
where a = (2r/XI)l.For sinusoidal phase modulation,
AiJm(t) = a cos(wot + 0),
we obtain the interference signal
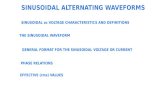
Fig. 1. Setup of the feedback control of an injection current in alaser-diode interferometer.
ler (FBC) from Fig. 1. The injection current of thelaser diode (LD) consists of a dc component io and atime-varying component Aim(t) produced with anoscillator (OSC). The dc component determines thecentral wavelength of the light X0, and the Aim causesa small change in the wavelength of the laser diode:
Ax(t) = 3iAm(t), (1)
where 13 is a proportional constant. Thus the wave-length of the LD is given by
X(t) = X, + AX(t). (2)
The optical wave emitted from the laser diode isrepresented by
A(t) = exp 2rc f0 [1A(t)] dtl = exp[J(t)], (3)
where c is the velocity of light, and the amplitude isassumed to be unity. The light reflected from anobject is an objective wave, and the light reflectedfrom the mirror (M) is a reference wave. The interfer-ence pattern produced by the two waves is detectedwith a photodiode (PD). The optical path lengths ofthese waves are denoted by 1 and 1,, respectively. Thetime-varying component of the interference signal isgiven by
S(t) = cos[N(t - ro) - 4(t - ,r)] = cos :(t), (4)
where To = l/c and Tr = I, /c. Using the approximation
1l(t) (11/X) {1 - [AX(t)/1X]}, (5)
and the definition
f A(t) dt = AA(t), (6)
the argument in Eq. (4) becomes
D(t) = (2rr/X,)l - (2irc/o2 ) [A(t - T) - AA(t - Tr)], (7)
where I = I, - 4. In the conditions of T0 << 1 and r <<
1, we have the approximation
AA(t - T) - AA(t - r) (i/c)AX(t), (8)
S(t) = cos[z cos(kt + ) + a], (11)
where z = -(2r/Xo2) al.
B. Signal Processing
We reported on the method used to obtain the phase afrom the interference signal in Ref. 5. Here we reviewbriefly a method for detecting the interference signalby a photodiode. Equation (11) is rewritten as
S(t) = (cos a) [JO(z) - 2J2(z) cos(2w)t + 20) + * * ]
- (sin a) [2J,(z) cos(wt + 0)
- 2J,(z) cos(3wot + 30) + * * 1, (12)
where Jn is the nth-order Bessel function. The Fou-rier transform of Eq. (12) is represented by F(o). Theamplitude of the phase modulation z is obtained fromthe ratio IF(wo3)IF(3wc ) .The phase 0 is obtained fromthe argument F(wo). Using the values of z and 0, wecan calculate the phase a from F((o,) and F(2wo).These computations are carried out on a computer.
111. Elimination of External Disturbances with FeedbackControl
A. Principle
The wavelength of the laser diode changes by AXTwith temperature. Optical components in the interfer-ometer vibrate in response to external mechanicalvibrations. This causes the change Al in the opticalpath difference between the object and referencewaves. Both AXT and Al cause a fluctuation in thephase of the interference signal. The fluctuation iscompensated for by controlling the injection currentto produce the change AX, in the wavelength of thelaser diode. To consider the changes AXT, Al, and AX,in Eq. (9), I and AX are replaced with I + Al and AX +AXT + AX1, respectively. By neglecting the term(AX + AXT + AXI)A 1, the interference signal for sinu-soidal phase modulation is written as
S(t) = cos[z cos(kt + 0) + a + 8(t)], (13)
where
8(t) = (2'rT/X0)Al - (27r1/Xo2) (AT + AX1). (14)
We try to reduce the phase 8(t) to zero by controllingthe AX, which is produced by a change Aic(t) in theinjection current.
1 October 1991 / Vol. 30, No. 28 / APPLIED OPTICS 4041
(9)
(10)

Let us explain how to generate the feedback signalfor controlling the injection current Ai,(t) of the laserdiode. The expansion of Eq. (13) is obtained byreplacing a with a + &(t) in Eq. (12). By producing thesignal S (t) cos(wt + 0) and passing this signal througha low-pass filter, we obtain the feedback signal
SF(t) = J(z) sinla + 8(t)]. (15)
This feedback signal is available in the region of z =0.5-3.5, where the value of the Jl(z) is not so small.
We can keep the phases a and (t) at zero with aproportional and integral feedback control using thefeedback signal given by Eq. (15). The feedback signalis generated in the feedback controller shown in Fig.1, and it is fed to a proportional amplifier and anintegrator. The sum of these outputs is the injectioncurrent Ai,(t). The proportional feedback control re-duces the phase (t) to zero. The integral feedbackcontrol stabilizes the phase a at 2nir, where n is aninteger. When a is equal to (2n + 1)7r, the feedbackcontrol is unstable. For the sake of simplicity, we usethe expression where the phase a is kept at zero.
B. SPM Interferometer
Figure 2 shows an SPM interferometer with a feed-back control system used for movement measure-ments. The central wavelength of laser diode 1 (LD1)is Xo1, and the frequency of the sinusoidal phasemodulation is wci. The change in temperature causesa change A, in the wavelength of LD1, and theinjection current for the feedback control causes achange AX,,. The light emitted from the laser diode iscollimated with lens 1 (Li). The light reflected frommirror 1 (Ml) is a reference wave. The light passingthrough the beam splitter (BS) is an object wave. Aportion of the object wave is illuminated onto theobject. The reflected light from the object and thereference light is superimposed on photodiode 1(PD1). The optical path difference is 1, and it changesby Al due to mechanical vibrations of the opticalcomponents. The interference signal detected withPD1 is written as
S(t) = cos[z1 cos(w0lt + 0) + a, + 8(t)], (16)
Fig. 2. SPM laser-diode interferometer with a feedback controlsystem to eliminate external disturbances.
Fig. 3. Two-wavelength SPM laser-diode interferometer with afeedback control system to eliminate external disturbances.
where
8v(t) = (2,Tr/X,)Af - (2'rrf/X012 ) (AXTl + AX1 ),
a,f = (2r/Xo,)f. (19)
The feedback signal is generated from this interfer-ence signal in the feedback controller. When feedbackcontrol is operating well, phases 8,f(t) and alf are keptat zero. Then the phase a is represented as
a, = (2ir/X,) (I - If). (20)
This equation indicates that the phase a shows thedistance between the object and M2. Using the condi-tion 8lf(t) = 0, Eq. (17) becomes
8(t) = (2ir/X,,) [Al - (f)Alf .where
8,(t) = (2r/XA)Al - (27ri/X,2) (AXT + AXn),
a, = (27r/X,,)I. (17)
On the other hand, the remainder of the object waveis illuminated onto mirror 2 (M2). The light reflectedby M2 and the reference light reach photodiode 2(PD2). The optical path difference is If, and its changeis represented by Alf. The interference signal detectedwith PD2 is written as
Sf(t) = cos[z,,fcos(ot + 01) + a + (t)], (18)
The phase 81(t) is not always zero, because the opticalpath difference and its change Al in the signal S(t)are not equal to If and Alf in the signal Sf(t).
IV. Two-Wavelength Interferometer
We add another interferometer to the interferometershown in Fig. 2, which produces the two-wavelengthinterferometer shown in Fig. 3. The central wave-length of the second interferometer is X02, and thefrequency of the sinusoidal phase modulation is W, 2/2-rr. The symbols used for the second interferometerhave a 2 subscript, which is to be distinguished from
4042 APPLIED OPTICS / Vol. 30, No. 28 / 1 October 1991
M1l
(21)

those used for the first interferometer. By replacingX0 1 A, and AX,, with X0 2, ,AX, and AX1 2 , respectively,
in Eqs. (17) and (19), we define the phases a,, 82(t), 21f,and 82f(t) for the second interferometer.
The signals S(t) and Sf(t) detected with PD1 andPD2, respectively, are the sum of the two interferencesignals corresponding to the two wavelengths X1 andX02 as follows:
S(t) = cos[z1 cos(GWt + 01) + a, + 81(t)]
+ COS[Z 2Cos(W 2 t + 02) + 2 + 2 (t)],
Sf(t) = Cos[Z1 cos(W'1t + ) + Ulf + 8'#)]
+ COS[Z 2f cos(o)0 2 t + 02) + a2 f + 82f(t)]
-s
, 2
5 0
-2
-oCd(22) 1
0
0i - l 0 2 4 6
- . t (min0
(a)
I * * tf 6
(23)
The feedback signals for controlling the injectioncurrents of LD1 and LD2 are obtained from theinterference signal Sf(t) in the feedback controller.Producing the signals S (t) cos(Oit + 0 i) (i = 1, 2)and passing these signals with low-pass filters, weobtain the feedback signals Jl(zif) sin[ao + if(t)](i = 1, 2), respectively. When the two feedback con-trols for LD1 and LD2 work well, conditions auif = 0and Bif(t) = 0 (i = 1, 2) hold. Thus the phases (xl and81(t) are given by Eqs. (20) and (21), and the phases a2and 82(t) are given by the equations that are producedby replacing X0) with X02 in Eqs. (20) and (21).
We obtain the phase ati + &i (i = 1, 2) from theFourier transform F(w) of the interference signal S(t)using the method described in Subsection II.B. In theFourier domain we can separate the two interferencesignals corresponding to the two wavelengths X01 andX02. The phase bi indicates the average value of bi(t)during the detecting interval or the length of thesignal to be processed on a computer. Before wecalculate the difference a between a, + b, and a2 + 82Xwe define the equivalent wavelength Xe produced fromwavelengths X01 and X02 as
e = (X01X,02)/(X,1 - X02). (24)
Then phase a is given by
a = (2'rr/X,) (1 - f) + (27r/X,) [a- (/if)Dif], (25)
where il and Alf are the average values of A(t) andAlf(t) during the detecting interval. Thus we measurethe distance 1 - If with the equivalent wavelength Xe,eliminating external disturbances.
V. Experiments
A. Construction of the Interferometer
We constructed the two-wavelength interferometershown in Fig. 3. We used GaAlAs laser diodes whosewavelengths are 780 nm. The difference betweenthe two wavelengths was 4 nm. The two frequen-cies of the sinusoidal phase modulations o),,/2rr andw,,2/2 7r were 1 and 8 kHz, respectively. The opticalpath differences I and If were 80 and -60 mm,respectively. The distance between the two pinholeson PD1 and PD2 was 2 mm. The interference signal
-1 i_2 4 6
t (min)(b)
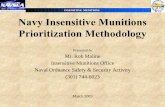
Fig. 4. Effects of eliminating external disturbances: (a) feedbackcontrol not working; (b) feedback control working well.
S(t) was sampled with an analog-to-digital converterto be stored on a microcomputer. The samplingfrequency was 64 kHz, and the length of the sampleddata was 32 ms. We obtained phase a through the fastFourier transform of the sampled data with thecomputer.
B. Effect of Eliminating External Disturbances
In the interferometer shown in Fig. 3, we used analuminum plate as the object, and the measuringpoint on the object was fixed. When the feedbackcontrol for eliminating external disturbances did notwork, measurements of phase a were repeated atintervals of 2 min. The measured phases are shown inFig. 4(a). The maximum fluctuation in phase a is 6rad. The phases measured when the feedback controlworked well are shown in Fig. 4(b). The feedbackcontrol reduces the fluctuation in the phase a byapproximately one tenth compared with that shownin Fig. 4(a).
C. Distance Measurements
In the interferometer shown in Fig. 3, we moved theobject parallel to the optical axis at intervals of 20 jim.Figure 5 shows the phases measured at severaldistances d. In this figure, phases ai (i = 1, 2) indicatephases ai + Ei (i = 1, 2), and they are denoted bycircles and rectangles, respectively. The phases a aredenoted by double circles. The measured phase a isproportional to the distance d, and this proportionalconstant gives Xe = 152 jim. The maximum deviationfrom the proportional relation in the phase a is 0.5rad, and this deviation causes the measurement errorof 6 lim.
D. Rotation Angle Measurement
To measure the rotation angles of the object, wechanged partially the constitution of the interferome-ter as shown in Fig. 6. Lens 3 makes an image of theobject with unity magnification. In this constitutionthe interference signal to be used for generating thefeedback signal is produced from the light reflected
1 October 1991 / Vol. 30, No. 28 / APPLIED OPTICS 4043

Cd
-4
2
is
0
N~~~
0
O 0O /l 401 180X
-2 L
Fig. 5. Measurementaluminum plate.
aE
.
LS
* al
a 2
2
0d (lrm)
-1
r Nresults of the moving distances of an
- 2
.
.
a2
0 1 2 3~
0.
8 (10- 3rad)
- 3 -Ml Fig. 7. Measurement results of the rotation angles of the mirror.
Object
I I
D = 2 mm
Fig. 6. Optical system used to create an image of an object in arotation angle and surface profile measurements.
from the object. Since the conditions = If and Al =Alf are satisfied, the fluctuations in the phase aare reduced to within 0.015 rad. We used a mirroras an object and rotated it at intervals of 1.0 x 10-3rad. At each rotation angle we measured a phase a asshown in Fig. 7. The phases a1 and a2 change by morethan 2 rad, but the phase a changes in proportion tothe rotation angle. Deviations from the proportionalrelation in the phase a are also within 0.015 rad.
E. Surface Profile Measurement
We measured surface profiles of diffuse objects withthe same interferometer used for measurements ofrotation angles. The object was an aluminum platewhose surface was coated with white paint. An imageof the object was made on the photodiodes with unitymagnification. The object was translated normal tothe optical axis at intervals that are equal in distanceto that between the two pinholes on the photodiodes.If the phase detected at the ith measuring point isrepresented by a' (i = 0, 1, 2, * ), the surface profile
Ea 40 _
2
0
*
* 0
.
S
-0~1~~~0 5 10 15
X (mm)
Fig. 8. Measurement results of the surface profile of an alumi-num plate.
at the measuring point is given by
r' = (X,/4ir) (a' + a'-' + - * + a' + a'),
where Xe = 152 jim. The phase ax corresponds to thephase of the interference signal detected with PD2when the first measuring point is located at PD1, sothat the phases a-0 and r are equal to zero. Wemeasured the phase a (i = 1-8). The measured sur-face profile is shown in Fig. 8. In this measurementthe fluctuations in the phase a were also within± 0.015 rad, which results in a measurement accuracy
of 0.18 jim.
VI. Conclusions
We have described the two-wavelength SPM laser-diode interferometer with a feedback control systemthat eliminates external disturbances. Fluctuationsin the wavelength of the laser diode were completelyeliminated with the feedback control system. In dis-tance measurements the fluctuations in the phase ofthe interference signal caused by mechanical vibra-
4044 APPLIED OPTICS / Vol. 30, No. 28 / 1 October 1991
al
. . . .
3
I I I
l_ l ll

tions were reduced to one tenth. By a rotation angleand surface profile measurements, the fluctuationswere reduced to within +0.015 rad. Thus accuratemeasurements were made with no effects from exter-nal disturbances. In SPM interferometry we canutilize effectively the property that the light wave-length of the laser diode can be modulated by theinjection current; thus we can construct two-wave-length interferometers that are insensitive to exter-nal disturbances with simple optical and electricalcomponents.
References1. J. C. Wyant, "Testing aspherics using two-wavelength
holography," Appl. Opt. 10, 2113-2118 (1971).2. C. Polhemus, "Two-wavelength interferometry," Appl. Opt. 12,
2071-2074 (1973).
3. C. C. Williams and H. K. Wickramasinghe, "Optical ranging bywavelength multiplexed interferometry," J. Appl. Phys. 60,1900-1903 (1986).
4. A. J. den Boef, "Two-wavelength scanning'spot interferometerusing single-frequency diode lasers," Appl. Opt. 27, 306-311(1988).
5. 0. Sasaki and H. Okazaki, "Sinusoidal phase modulatinginterferometry for surface profile measurement," Appl. Opt.25, 3137-3140 (1986).
6. 0. Sasaki and H. Okazaki, "Analysis of measurement accuracyin sinusoidal phase modulating interferometry," Appl. Opt. 25,3152-3158 (1986).
7. 0. Sasaki, K. Takahashi, and T. Suzuki, "Sinusoidal phasemodulating laser diode interferometer with feedback controlsystem to eliminate external disturbance," in Fringe PatternAnalysis, G. T. Reid, ed., Proc. Soc. Photo-Opt. Instrum. Eng.
1163, 14-21 (1989).
1 October 1991 / Vol. 30, No. 28 / APPLIED OPTICS 4045