Interdependence of solar plasma flows and magnetic fields Dr. E.J. Zita AAS 2012 Anchorage, AK.

1
FINITE ELEMENT MODELING OF THERMAL PLASMA FLOWS
Juan Pablo Trelles
Department of Mechanical Engineering, University of Minnesota
Acknowledgements: Prof. Joachim Heberlein and Prof. Emil Pfender (U of MN),
National Science Foundation, and Minnesota Supercomputing Institute
Hillsboro, OR - August 3, 2007

2
Outline
(why it is important)
(how to describe it)
(how to deal with it)
(where we are)
(what’s next)
(how to use it)
1. Introduction & Background
2. Mathematical Model
3. Numerical Model
4. Solution Approach
5. Simulation Results
6. Summary & Conclusions

3
Preface
“Technological applications need methods for the solution of general multiphysics-multiscale problems”
– Methods that rely as little as possible on deep analysis of equations – Accurate, reliable, fast solutions – Promising: Variational Multiscale Methods (VMS)
Physical Phenomena
reactions, surface proc., phase changes, …
Mathematical Model
ODEs, PDEs, ADEs, IDEs, …
Numerical Model
FE, FD, FV, Spctrl
Solution Algorithms
BD, Newton-Krylov, AMG, Schwarz, …
knowledge
k k+1
knowledge
bottleneck for multiphysics-multiscale problems
i.e. plasmas
Technological Advancement through Modeling & Simulation:

4
Plasmas: • Partially or fully ionized gases • Any gas mixture with charged species, i.e. Ar + M → Ar+ + e- + M • +99% of observable mass in the universe • 4th state of matter: solid → liquid → gas → plasma
• Typically, span over a wide range of scales …
Definition of Plasma
cold
solid liquid gas plasma
temperature hot

5 natural technological
Plasmas:
* Plasma Science: From Fundamental Research to Technological Applications, The National Academies Press, 1995

6
• Thermal plasmas widely used for materials processing
• Applications show inconsistent results due to instabilities
Ø Characteristic process time in same order as instability
Ø Example: plasma spray coating
Motivation of this Research
Goal of this research: Develop a computational model capable of describing thermal plasma flows in industrial applications
- Need better understanding of plasma dynamics -
* www.praxair.com
torch
jet coating
powder

7
Arc Plasma Torches
plasma torch plasma jet
► arc length ∝ voltage drop
Voltage (V)
► arc dynamics → jet forcing
t3
t5 t6 t4
t1 t2

8
Dynamics of Thermal Plasma Flows
1. Imbalance electromagnetic – flow drag forces
1
1
2
voltage Δφ
time t
3. Plasma flow instabilities due to gradients
2
2. Breakdown process (reattachment) when Δφ > Δφbreakdown
3
4
voltage Δφ
time t

9 * S. Wutzke, PhD Thesis, UMN, 1967
1. attachment movement
2. new attachment appears
3. new attachment remains
anode
anode
anode
Breakdown Process experiments, simplified geometry

10
Plasma Flow Instabilities
• Fluid: shear instability
* M. Van Dyke, An Album of Fluid Motion, 1982
arc column – cold flow interface
cathode column
anode column
• Magnetic: kink and sausage instabilities
anode column – cold flow
• Thermal: cold flow interaction

11
Outline
1. Introduction & Background
2. Mathematical Model
3. Numerical Model
4. Solution Approach
5. Simulation Results
6. Summary & Conclusions

12
Plasma Models
cs
s fDtDf =
Fundamentally: kinetics or Boltzmann
],[],[
vxtvx
tDtD
∂
∂
∂
∂+
∂
∂=
rate of change in phase-space
change due to collisions
∑ −=j
jss
s Fdtxdm
2
2

Fluid (continuum) • Boltzmann approxs. • Multi-fluid • Chemical & thermal non-equilibrium • Chemical & thermal equilibrium • Equilibrium & inviscid
Particle (discrete) • Molecular Dynamics (MD) • Monte Carlo (DSMC) • Particle-in-Cell (PIC)
• …
less accurate, simpler
more accurate
Models:
13
Plasma Models
in this research
Fundamentally: kinetics or Boltzmann
],[],[
vxtvx
tDtD
∂
∂
∂
∂+
∂
∂=
rate of change in phase-space
change due to collisions
cs
s fDtDf =∑ −=
jjs
ss Fdtxdm
2
2

14
Thermal Plasma Model
• Local Thermal Equilibrium (LTE) or Non-Equilibrium (NLTE) • System of Transient-Advective-Diffusive-Reactive equations (TADR):
transient + advection - diffusion - reaction = 0
1. Mass cons.
2. Species cons.
3. Momentum
4. Energy Heavies
5. Energy Electrons
6. Current cons.
7. Ampere’s law 0
000
00
2
'
'
AAutA
J
QQQDtDpqhu
th
QDtDpqhu
th
BJpuutu
Jyuty
uut
p
q
rJehe
eee
ehh
hhh
q
csss
s
∇×∇×−∇∂
∂
⋅∇−
−+−⋅∇−∇⋅∂
∂
+⋅∇−∇⋅∂
∂
×⋅∇−∇−∇⋅∂
∂
⋅∇−∇⋅∂
∂
⋅∇+∇⋅∂
∂
ηφ
ρρ
ρρ
τρρ
ρρρ
ρρρ
+ thermodynamic & transport properties + add. relations

15
• Local Thermal Equilibrium (LTE) or Non-Equilibrium (NLTE) • System of Transient-Advective-Diffusive-Reactive equations (TADR):
transient + advection - diffusion - reaction = 0
1. Mass cons.
2. Species cons.
3. Momentum
4. Energy Heavies
5. Energy Electrons
6. Current cons.
7. Ampere’s law 0
000
00
2
'
'
AAutA
J
QQQDtDpqhu
th
QDtDpqhu
th
BJpuutu
Jyuty
uut
p
q
rJehe
eee
ehh
hhh
q
csss
s
∇×∇×−∇∂
∂
⋅∇−
−+−⋅∇−∇⋅∂
∂
+⋅∇−∇⋅∂
∂
×⋅∇−∇−∇⋅∂
∂
⋅∇−∇⋅∂
∂
⋅∇+∇⋅∂
∂
ηφ
ρρ
ρρ
τρρ
ρρρ
ρρρ
+ thermodynamic & transport properties + add. relations
for thermal equil. h = hh + he
Thermal Plasma Model

16
• Local Thermal Equilibrium (LTE) or Non-Equilibrium (NLTE) • System of Transient-Advective-Diffusive-Reactive equations (TADR):
transient + advection - diffusion - reaction = 0
1. Mass cons.
2. Species cons.
3. Momentum
4. Energy Heavies
5. Energy Electrons
6. Current cons.
7. Ampere’s law 0
000
00
2
'
'
AAutA
J
QQQDtDpqhu
th
QDtDpqhu
th
BJpuutu
Jyuty
uut
p
q
rJehe
eee
ehh
hhh
q
csss
s
∇×∇×−∇∂
∂
⋅∇−
−+−⋅∇−∇⋅∂
∂
+⋅∇−∇⋅∂
∂
×⋅∇−∇−∇⋅∂
∂
⋅∇−∇⋅∂
∂
⋅∇+∇⋅∂
∂
ηφ
ρρ
ρρ
τρρ
ρρρ
ρρρ
+ thermodynamic & transport properties + add. relations
for thermal equil. h = hh + he
no for chemical equil.
Thermal Plasma Model

17
Plasma Composition
Ø Chemical – non-equil. ⇒ transport eqns.
Ø Chemical – equil. ⇒ mass action law
OK if τchem << τflow, i.e. Saha:
,...),,,,,( ehs TTpuxtn
),,( ehs TTpn
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟
⎟⎠
⎞⎜⎜⎝
⎛≈
−− eB
i
P
ee
i
ie
i
ieTkh
TmQQQ
nnn επ exp2 2
3
211
MeAMA ii ++↔+ −−1

18
Plasma Composition Equilibrium Compositions @ 1 atm
Ar-He (75-25 vol.), Th = Te
Ar, Th ≠ Te
,...),,,,,( ehs TTpuxtn
),,( ehs TTpn
he TT=θ
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟
⎟⎠
⎞⎜⎜⎝
⎛≈
−− eB
i
P
ee
i
ie
i
ieTkh
TmQQQ
nnn επ exp2 2
3
211
MeAMA ii ++↔+ −−1
Ø Chemical – non-equil. ⇒ transport eqns.
Ø Chemical – equil. ⇒ mass action law
OK if τchem << τflow, i.e. Saha:

19
Thermodynamic Properties
~ straightforward once composition is known, i.e.
Ar-He, Th = Te
Ar, Th ≠ Te
∑= s ssnmρ )(25
ssss sB nTnkh ερ += ∑

20
Transport Properties
Ø Chapmank-Enskog procedure: Approx. Prob. Dist. Func. by
Apply moments + determine fluxes ⇒ equate to fluid model fluxes
i.e. 2nd order approx. viscosity *
)1(... 02210ssssss fffff ξφξξ +≈+++=
[ ] 1110
01001110
0100
2 ,000
2)2(5
21
21
ijij
ijij
j
ijij
jiijijB
qqqq
qn
qqmnqq
qTk
=−=π
µ
* See: Devoto Phys. Fluids 10(2) 1982

21
Transport Properties Ar, Th ≠ Te
Ø Chapmank-Enskog procedure: Approx. Prob. Dist. Func. by
Apply moments + determine fluxes ⇒ equate to fluid model fluxes
i.e. 2nd order approx. viscosity *
[ ] 1110
01001110
0100
2 ,000
2)2(5
21
21
ijij
ijij
j
ijij
jiijijB
qqqq
qn
qqmnqq
qTk
=−=π
µ
* See: Devoto Phys. Fluids 10(2) 1982
)1(... 02210ssssss fffff ξφξξ +≈+++=

22
Diffusive Fluxes
Diffusive fluxes:
)( 32 δµτ
uuu t ⋅∇−∇+∇−=
∑ ≠−∇−= es sshhh JhTq
κ'
eeeee JhTq
−∇−= κ'due to reactions

23
Diffusive Fluxes
Diffusive fluxes:
)( 32 δµτ
uuu t ⋅∇−∇+∇−=
∑ ≠−∇−= es sshhh JhTq
κ'
eeeee JhTq
−∇−= κ'
Mass diffusion: Self-Consistent Effective Binary Diffusion (SCEBD)
due to reactions
∑≠
+−=sj
jjj
jss
ss
ss G
TRD
yGTRD
J ''
inter-species transport

24
Diffusive Fluxes
Diffusive fluxes:
)( 32 δµτ
uuu t ⋅∇−∇+∇−=
∑ ≠−∇−= es sshhh JhTq
κ'
eeeee JhTq
−∇−= κ'
ee
q JmeJ
−≈
∑≠
+−=sj
jjj
jss
ss
ss G
TRD
yGTRD
J ''
pe
e
e
q
e
eq E
enpE
enBJ
enpBuEJ
σσσ =⎟⎟
⎠
⎞⎜⎜⎝
⎛ ∇+≈
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−
×−
∇+×+= ...
Mass diffusion: Self-Consistent Effective Binary Diffusion (SCEBD)
Generalized Ohm’s law: (consistent with SCEBD)
due to reactions
inter-species transport
effective electric field

25
Electromagnetic Equations
• Maxwell’s equations: 1) Ampere’s law: 2) Faraday’s law:
3) Ohm’s law: 4) Gauss’ law: 5) No magnetic monopoles: 0
0
)(
0
=⋅∇
=⋅∇
×+=
∂∂−=×∇
=×∇
B
J
BuEJ
tBE
JB
q
pq
p
q
σ
µ

26
Electromagnetic Equations
• Maxwell’s equations: 1) Ampere’s law: 2) Faraday’s law:
3) Ohm’s law: 4) Gauss’ law: 5) No magnetic monopoles:
• 3) in 1) → in 2) ⇒ Magnetic Induction eqn.
0
0)()(
=⋅∇
=×∇×∇+××∇−∂
∂
B
BButB
η
0
0
)(
0
=⋅∇
=⋅∇
×+=
∂∂−=×∇
=×∇
B
J
BuEJ
tBE
JB
q
pq
p
q
σ
µ

27
Electromagnetic Equations
• Maxwell’s equations: 1) Ampere’s law: 2) Faraday’s law:
3) Ohm’s law: 4) Gauss’ law: 5) No magnetic monopoles: 0
0
)(
0
=⋅∇
=⋅∇
×+=
∂∂−=×∇
=×∇
B
J
BuEJ
tBE
JB
q
pq
p
q
σ
µ
• 3) in 1) → in 2) ⇒ Magnetic Induction eqn.
0
0)()(
=⋅∇
=×∇×∇+××∇−∂
∂
B
BButB
η
)0 from (suggested
priori) a 0(
=⋅∇∂∂−−∇=
=⋅∇×∇=
qpp JtAE
BAB
φ 0)()(
0
=×∇×−∂
∂⋅∇+∇⋅∇
=×∇×∇+×∇×−∇+∂
∂
AutA
AAutA
p
p
σφσ
ηφ
• Or, in term of potentials

28
Source Terms
Joule heating: Due to net current flow; main term driving “electric arcs”
)( BuEJQ qJ ×+⋅=

29
Source Terms
Joule heating: Due to net current flow; main term driving “electric arcs”
)( BuEJQ qJ ×+⋅=
tA
enpEE pe
ep ∂
∂−−∇=
∇+≈
φ* effective field and potential:

30
Source Terms
Joule heating: Due to net current flow; main term driving “electric arcs”
∑ ≠ −= es esheeses
eBeh TTnmm
kQ δν )(3
)( BuEJQ qJ ×+⋅=
Energy exchange:
Due to collisions between electrons and all other species
tA
enpEE pe
ep ∂
∂−−∇=
∇+≈
φ
Radiation losses: Net volumetric emission coefficient
* effective field and potential:

31
Outline
1. Introduction & Background
2. Mathematical Model
3. Numerical Model
4. Solution Approach
5. Simulation Results
6. Summary & Conclusions

32
Numerical Approximation
§ The “Holy Grail” of numerical methods (?):
Exact solution independently of the size of the discretization … in a fast & reliable manner … for arbitrary problems (i.e. TADR)
y exact solution
discrete approximation (point-wise exact)
x or t
Ø Need to consider solution approach (i.e. solve Ax = b) Ø No such method exists yet

33
Finite Differences Finite Volumes Finite Elements
Discretization Methods
0Y =)(R ∫Ω =Ω⋅ 0YW d)( R∫Ω =Ω 0Y d)( R
approximate equation approximate solution
• Most common, weighted residual methods with local support:
Ø If implemented correctly, all methods perform ~ same Ø Challenge for all methods: multi-scale problems
stencil control volume finite element
e1 e2
e3 e4 out in (i,j)
(i+1,j)
(i-1,j)
(i,j+1)
(i,j-1)

34
Multiscale Phenomena
Typical example:
x or t
boundary layers, sheaths
chemical reactions, nucleation
shocks, chemical fronts
turbulence, wave scattering
y
“different characteristic sizes needed to describe different parts of the
process”
* Ed. Wiley, 2000

35
A Simple Multiscale Problem
xy =
0)0( ,1' == yy
1st order ODE: Solution:

36
A Simple Multiscale Problem
1st order ODE: Solution:
0)1( ,0)0( ,1''' ===+− yyyyε
⎟⎟⎠
⎞⎜⎜⎝
⎛
−
−−=
)1exp(1)exp(1
εεxxy
boundary layer
xy =
0)0( ,1' == yy
Perturbed ODE (ε → 0): Solution:

37
Multiscale Problems
Why are multiscale problems difficult? Ø Every numerical method (FD, FV, FE, spectral, etc.) fails
unless Δx < O(ε)
Solution: Ø Design methods that take into account the effect of the
smallest (unsolvable) scales into the large (solvable) scales
Why? Ø Smallest scale needs to be resolved:
Δx < smallest spatial scale & Δt < smallest temporal scale Ø Unmanageable in general TADR equations in 3D

38
• System of TADR equations:
The TADR System
0YSYSYKYAYA 010 ==+−∇⋅∇−∇⋅+∂∂ )()()()(reactivediffusiveadvectivetransient
R t
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
A
TTup
A
Tup
p
e
h
φφ
or Y
• Many problems can be treated as TADR, i.e. − Incompressible & compressible flows − Multi-fluid models − Boltzmann approximations
• Inherently Multi-Scale (whenever a term dominates over the others)
• This is ~ arbitrary. In a code, we really need:
functions of 010 SSKAA , , , , ... ,, , , , YYYX ∇t
here:

39
• Variational form TADR system:
• Scale decomposition:
Variational Multiscale Methods (I)
' and ' WWWYYY +=+=
0YWYW ==Ω⋅∫Ω ))(,()( RR d
total = large + small

40
• Then is equivalent to:
• Variational form TADR system:
• Scale decomposition:
Variational Multiscale Methods (I)
' and ' WWWYYY +=+=
0-)( :from defined SYY LR L* =
0YWYW ==Ω⋅∫Ω ))(,()( RR d
0YW =))(,( R
scale) (large equation scale smallscale) (small equation scale large
)','()) (,'( and )',())(,(ff ==
=+=+ 0YWYW0YWYW LRLR
total = large + small

41
• Large Scales: using duality
Variational Multiscale Methods (II) )',()',( YWYW ∗= LL
0YWYW =+ ∗ )',())(,( LR (large scales equation depends on Y’)

42
• Large Scales: using duality
Variational Multiscale Methods (II) )',()',( YWYW ∗= LL
0YWYW =+ ∗ )',())(,( LR (large scales equation depends on Y’)
• Small Scales: equivalent weak form
solve using Green’s function or … 'd) ('' )'(' )',( Ω−= ∫Ω XXX YY Rg
) (' )) (,'()','( YYYWYW RLRL −=→−=
) (' YτY R−= (τ approx. of integral operator)

43
• Large Scales: using duality
Variational Multiscale Methods (II) )',()',( YWYW ∗= LL
0YWYW =+ ∗ )',())(,( LR (large scales equation depends on Y’)
• Small Scales: equivalent weak form
solve using Green’s function or … 'd) ('' )'(' )',( Ω−= ∫Ω XXX YY Rg
) (' )) (,'()','( YYYWYW RLRL −=→−=
) (' YτY R−= (τ approx. of integral operator)
• Finally: equation for large scales only
0YτWYW =− ∗ ))(,())(,( RLR

44
• Generalization:
P = Ladv SUPG P = L GLS P = -L* VMS
Stabilized & Multiscale Finite Element Methods
n4 n3
n2 element
n1 (e)
node Ω
Ω’
∫∫ ΩΩ=Ω⋅+Ω⋅
'')()()( 0YτWYW dd RPR
• Requires minor modification to a standard FEM • Solves many “difficult” problems: i.e. incompatible discretizations • Applicable to other methods: Finite Volumes, Spectral
“A Framework for the Solution of General Multiphysics-Multiscale Problems”
Ø BUT … still left: define good τ

45
Intrinsic Time Scales Matrix, τ
• Formally: • Empirically:
λs characteristic scales of each operator; i.e. in 1D:
and some adequate norm | ⋅ | needs to be defined
11 )/( −− −∇⋅∇−∇⋅+∂∂=≈ 1SKAτ tL
21
)( 2222 −+++= reactdiffadvtrans λλλλ 10 SKAAτ
tttrans Δ≈
∂
∂≈
1λ
xxadv Δ≈
∂
∂≈
1λ 22
2 1xxdiff
Δ≈
∂
∂≈λ 1≈reactλ
Ø Better & more accurate formulations possible – but more expensive Ø Above τ has proven efficient and robust … see Simulation Results

46
Outline
1. Introduction & Background
2. Mathematical Model
3. Numerical Model
4. Solution Approach
5. Simulation Results
6. Summary & Conclusions

47
Discrete System
Ø Newton Method: Ø Residual vector:
Ø Jacobian matrix: (approx., frozen coeff.)
∫∫
∫∫∫
ΩΩ
ΓΩΩ
∇⋅∇+⋅
+⋅+∇⋅∇+−−∇⋅+∂∂⋅=
=
ee
eee te
ee
)( )()(
)()())((
2
YKNYτN
YqqNYKNSYSYAYANRes
ResRes
DC
10010
RP
A
∫∫
∫∫∫
ΩΩ
ΓΩΩ
∇⋅∇+⋅
⋅+∇⋅∇+−∇⋅+⋅=
=
ee
eeee
ee
)( )()(
)()())((
2
NKNNτN
NqNNKNNSAANJac
JacJac
DC
110
RP
ζ
A
spy(Jace) for Hexahedra
node
YResJacResYJac0YRes ∂∂≈−=Δ⇒→ , )(
* N = N(X) basis function

48
Solver Layout
Need to solve:
Loop: Time stepping - Second order implicit predictor-multicorrector
Loop: Solution non-linear system - Globalized Newton-Krylov method
Loop: Solution linear system - Preconditioned Generalized Minimal Residual (GMRES)
end end
end
0YRes0YYXRes =→= )( ),,,( t
11
1
++
+
Δ+=
≤Δ+
kkkk
kk
YYY
ResYJacRes
λ
γ
)()(
11 bPxAP
bAx−− =
=
0YYXRes →),,,( t

49
Time Stepping
• Solution of by 2nd order, implicit, predictor multi-corrector, with control of high frequency amplification
0YYRes
YYY
YYY
YYYY
=
+−=
+−=
+−=Δ
−
++
++
++
++
),(
)1(
)1(
)1(
1
1
11
mf
m
f
nn
nmnmn
nfnfn
nfnfnn
t
αα
α
α
αα
αα
αα
0YYRes =),(
• higher order → BD methods (i.e. Sundials’ IDA solver)
• α-method or BD only need: Res and Jac for a given
Ø Need solution of non-linear system at each time step t
const
n
nnn Δ
=∂
∂=YYYY
ς , ,
t tn tn+1 tn+αf
yn+αf
t tn tn+1 tn+αm
dy/dtn+αf
Δt αfΔt Δt αmΔt
y(t) dy/dt(t)
dy/dtn
dy/dtn+1 yn+1
yn

50
Solution of Non-Linear System
• Needed: minimum function evaluations (expensive for complex physics → matrix–free, pseudo-trans. not very attractive)
• Globalized Inexact Newton:
>> Forcing term γ: Eisenstat-Walker >> Backtracking: Armijo condition >> Line search λ: Parabolic - three point interpolation
11
1
++
+
Δ+=
≤Δ+
kkkk
kk
YYY
ResYJacRes
λ
γ
* Backtracking essential when Δt still large (too large change in solution)

51
Solution of Linear System
• Scaling: (unavoidable, unless dimensionless variables are used)
)( ,~~ 11 ADbxAbDAxD diag==→= −−
)~(_ ,~~~~ ~~ 11 APbxAbPxAP 000 diagblock==→= −−
... , ~~~~ 11 ==→= −− PbxAbPxAP
• Pre-preconditioning: (something to do to A and b before linear solve)
• Preconditioning: (as usual)
ILU(0) ILU(tol) Add. Schwz. EBE-GS BlkDiag
Scaling X X X X X
Pre-PreCond X X
PreCond X X X X
best (least expensive)
(EBE)
• Generalized Minimal Residual (GMRES) with restarts + …

52
Outline
1. Introduction & Background
2. Mathematical Model
3. Numerical Model
4. Solution Approach
5. Simulation Results
6. Summary & Conclusions

53
Computational Domain Ω
- hexahedral trilinear elements - torch or torch + jet - d.o.f. per node: 9 for LTE
10 for NLTE cathode
anode
cathode anode
arc jet
torch inside

54
Solution Parameters/Statistics
Time Advancement: Δt ~ 0.1 – 1.0 µs nt ~ 500 – 1000 (each reattachment period ~ 100 µs)
Non-linear Solver: ~ 5-7 Inexact Newton ites. /Δt
η0 = 1.0-2, γmax = 1.0-3 Backtracking needed @ beginning of reattachment
Stop: |Res|/|Res0| ≤ 0.1 & |ΔY|/|Y| ≤ 1.0-3
Linear Solver: Krylov space 30 x 5 restarts = 150 ites. /In. Newton
Scaling + Blck Diag. Pre-Preconditioner + No Preconditioner
nt: 474, t: 2.27e-04
> Reattachment process begins
ite: 1, out/in: 2/ 4, fevals: 4, red: 2, flag: 0, lam: 0.25, eta: 1.00e-02, errY: 3.62e-02, errR: 1.00e+00
ite: 2, out/in: 1/14, fevals: 1, red: 0, flag: 0, lam: 1.00, eta: 5.62e-03, errY: 1.08e-02, errR: 7.85e-01
ite: 3, out/in: 2/12, fevals: 1, red: 0, flag: 0, lam: 1.00, eta: 3.16e-03, errY: 9.06e-03, errR: 2.34e-01
ite: 4, out/in: 2/19, fevals: 1, red: 0, flag: 0, lam: 1.00, eta: 1.78e-03, errY: 4.68e-03, errR: 1.40e-01
ite: 5, out/in: 3/26, fevals: 1, red: 0, flag: 0, lam: 1.00, eta: 1.00e-03, errY: 3.73e-03, errR: 9.76e-02
errSS: 2.06e-02, dtnew = 3.06e-07, SFAC = 1.07

55
Temperature Distribution: LTE Model
Instantaneous temperature distribution inside the torch Conditions: Ar-He (75-25), 800 A, 60 slpm, straight injection
anode attachment

56
Arc Dynamics: LTE Model old attachment
new attachment forms new attachment remains
Ø Too large voltage drop !!!

57
ü reattach. cond.
Arc Dynamics: LTE + Reattachment Model
attachment growth new attachment
Ø More realistic voltage drop

58
Arc Dynamics
Ø Electric potential over 14000 K isosurface
t = 360 µs t = 362 µs
t = 363 µs t = 368 µs
original attachment
formation of new attachment
new attachment

59
0 100 200 300 400 500
28
29
30
31
time [µs]
Volta
ge D
rop
[V]
0 100 200 300 400 500
40
60
80
100
time [µs]Vo
ltage
Dro
p [V
]
0 50 100
40
45
50
55
time [µs]
Volta
ge D
rop
[V]
0 10 20 300
0.5
1
frequency [kHz]
Pow
er [A
.U.]
0 10 20 300
0.5
1
frequency [kHz]
Pow
er [A
.U.]
0 10 20 300
0.5
1
frequency [kHz]
Pow
er [A
.U.]
Exp.
Exp.
Num. A
Num. A
Num. B
Num. Bfp ~ 3.30 fp ~ 3.23 fp ~ 8.98
Comparison with Experiments
Ø LTE + Reattachment Model can match Voltage Drop Frequency OR Magnitude BUT NO BOTH
Eb = 5⋅104 V/m Eb = 2⋅104 V/m

60
Temperature Distributions: LTE & NLTE
NLTE
LTE
Ar, 400 A, 60 slpm, 60 slpm

61
Pressure and Velocity
• Formation of cathode jet ( ) • Cold flow avoids entering hot plasma
• Inflection points in velocity profiles
→ Kelvin-Helmholtz instability (?) plasma
cold flow

62
Electric Potentials and Fields
• NLTE model produces more realistic voltage drops
Er max

63
Arc Dynamics: LTE vs. NLTE
attachment
time
NLTE LTE

64
Comparison with Experiments
• Voltage frequencies NLTE & LTE can match • BUT … more realistic voltage drops with NLTE model • Wide spectra in exp. data due to pure Ar & new anode
0 100 200 300 400 50023
24
25
26
time [µs]
volta
ge d
rop
[V]
0 100 200 300 400 50027
30
33
36
time [µs]
Δφ
p [V]
0 100 200 300 400 50040
50
60
70
time [µs]
Δφ
[V]
0 10 20 300
0.5
1
frequency [kHz]
Pow
er [a
.u.]
0 10 20 300
0.5
1
frequency [kHz]
Pow
er [a
.u.]
0 10 20 300
0.5
1
frequency [kHz]
Pow
er [a
.u.]
EXP.
EXP.
NLTE
NLTE
LTE
LTEfp ~ 5.3 fp ~ 5.7

65
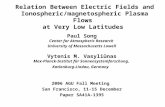
Arc and Jet Dynamics
Conditions: Ar, 400 A, 60 slpm
Simulations reveal complex structure of
fluctuating jet
Schlieren image plasma jet turbulence

66 simulation (Th) experiment
Arc Movement as Jet Forcing time

67
Outline
1. Introduction & Background
2. Mathematical Model
3. Numerical Model
4. Solution Approach
5. Simulation Results
6. Summary & Conclusions

68
1) Developed: n-dimensional, transient, fully coupled, Stabilized/
Multiscale-FEM solver for TADR eqns.
2) Solver applied to Thermal Equilibrium (LTE) and Thermal Non-
Equilibrium (NLTE) simulations of thermal plasma flows.
First time NLTE model applied to arc dynamics
3) Results of modeling of thermal plasma flows: § Main aspects of arc dynamics revealed § Reasonable agreement with experiments
4) Results NLTE model match experiments better than LTE
5) Non-equilibrium description essential for realistic arc modeling
Summary & Conclusions