Transient Analysis of Separately Excited DC Motor and Braking of ...
15
National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering & Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and Technology, Pg.117-131 117 | Page Transient Analysis of Separately Excited DC Motor and Braking of DC Motor Using Numerical Technique Pavan R Patil, Javeed Kittur, Pavankumar M Pattar, Prajwal Reddy, Poornanand Chittal Department of Electrical and Electronics B.V.B College of Engineering and Technology Hubli, India e-mail:[email protected] , [email protected] Abstract: This paper deals with transient analysis of separately excited DC motor and braking of DC motor where transient equations are worked out using numerical technique. The code is written for both transient analysis of separately excited DC motor and braking and thus verified using the GNU plot and also the results are verified using MATLAB / Simulink model. Keywords- Regenerative Braking; Plugging; Dynamic Braking. I. INTRODUCTION Transient Analysis is done to know the performance of motors. Basically, it tells us how one parameter is varied with respect to the other. In this paper, it tells us how current is varied with respect to time and how speed is varied with respect to time, without and with load torque of separately excited DC motor. Brakes are used to reduce or cease the speed of motors. We know that there are various types of motors available (DC motors, induction motors, synchronous motors, single phase motors, etc.) and the specialty and properties of these motors are different from each other, hence this braking method also differs from each other [1]. Breaking can be attained either mechanically or electrically. Under electrical breaking, there are three types, namely Journal homepage: www.mjret.in ISSN:2348 - 6953
Transcript of Transient Analysis of Separately Excited DC Motor and Braking of ...

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
117 | P a g e
Transient Analysis of Separately Excited DC Motor and Braking of DC Motor Using Numerical
Technique
Pavan R Patil, Javeed Kittur, Pavankumar M Pattar, Prajwal Reddy, Poornanand
Chittal
Department of Electrical and Electronics
B.V.B College of Engineering and Technology
Hubli, India
e-mail:[email protected], [email protected]
Abstract: This paper deals with transient analysis of separately excited DC motor and
braking of DC motor where transient equations are worked out using numerical technique.
The code is written for both transient analysis of separately excited DC motor and braking
and thus verified using the GNU plot and also the results are verified using MATLAB /
Simulink model.
Keywords- Regenerative Braking; Plugging; Dynamic Braking.
I. INTRODUCTION
Transient Analysis is done to know the performance of motors. Basically, it tells us how one
parameter is varied with respect to the other. In this paper, it tells us how current is varied
with respect to time and how speed is varied with respect to time, without and with load
torque of separately excited DC motor.
Brakes are used to reduce or cease the speed of motors. We know that there are various
types of motors available (DC motors, induction motors, synchronous motors, single phase
motors, etc.) and the specialty and properties of these motors are different from each other,
hence this braking method also differs from each other [1]. Breaking can be attained either
mechanically or electrically. Under electrical breaking, there are three types, namely
Journal homepage: www.mjret.in
ISSN:2348 - 6953

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
118 | P a g e
Regenerative Braking
Plugging type Braking
Dynamic Braking.
II. NUMERICAL TECHNIQUE
Numerical analysis involves the study of methods of computing numerical data. In many
problems this implies producing a sequence of approximations by repeating the procedure
again and again [2]. People who employ numerical methods for solving problems have to
worry about the following issues: the rate of convergence (how long does it take for the
method to end the answer), the accuracy (or even validity) of the answer and the
completeness of the response (do other solutions, in addition to the one found, exist).
Numerical methods provide approximations to the problems in question. No matter how
accurate, they are, they do not, in most cases, provide the exact answer. In some instances
working out the exact answer by a different approach may not be possible or may be too
time consuming and it is in these cases where numerical methods are most often used [3].
Euler’s method:
Euler’s method provides us with approximation for the solution of the differential equations.
The idea behind Euler’s method is to use the concept of linearity to join multiple small line
segments so that they make up an approximation of the actual curve.
Note: Generally, the approximation gets less accurate the further you get away from the
initial point [4].
Three things needed in order to use Euler’s method:
1) Initial point –Starting point must be given.
2) Delta- The change in step size must be given directly or information to find it.
3) The differential equation-The slope of each individual line segment should be known so
that delta is found.
Let us take as an example an initial value problem in ODE
(1)
The forward Euler’s method is one such numerical method and is explicit. Explicit methods
calculate the state of the system at a later time from the state of the system at the current
time without the need to solve algebraic equations. For the forward (from this point on

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
119 | P a g e
forward Euler’s method will be known as forward) method, we begin by choosing a step size
or ∆t the size of ∆t determines the accuracy of the approximate solutions as well as the
number of computations. Graphically, this method produces a series of line segments, which
thereby approximates the solution curve.
Fig. 1 Graphical illustration of Euler’s method
Let = 0, 1, 2… be a sequence in time with (2)
Let , and , be the exact and the approximate solution at , respectively. To obtain
from , we use the differential equation. Since the slope of the solution to the equation
at the point is , the Euler method determines the point (), by
assuming that it lies on the line through with the slope , Hence the formula
for the slope of a line gives
Or (4)
As the step size or ∆t decreases, then the error between the actual and approximation is
reduced. Roughly speaking, we halve the error by halving the step size in this case.
However, halving the ∆t doubles the amount of computation.
Backward Euler’s method:
The backward Euler’s method is an implicit one which, contrary to explicit methods finds the
solution by solving an equation involving the current state of the system and the later one.
More precisely, we have
(5)

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
120 | P a g e
This disadvantage to using this method is the time it takes to solve this equation. However,
advantages to this method include that they are usually more numerically stable for solving a
stiff equation a larger step size ∆t can be used.
Let us take following initial value problem
(6)
We will use forward and the backward Euler’s method to approximate the solution to this
problem and these approximations to the exact solution
(7)
In both methods we let ∆t = 0.1 and the final time t = 0.5.
(T)
(FEA)
(BEA)
Exact
(FE)
(BE)
0 1 1 1 0 0
0.1 0.9 0.9441 0.925795 0.025795 0.018305
0.2 0.853 0.916 0.889504 0.036504 0.026496
0.3 0.8374 0.9049 0.876191 0.03791 0.028709
0.4 0.8398 0.9039 0.876191 0.036391 0.027709
0.5 0.8517 0.9086 0.883728 0.032028 0.024872
Where T-time, FEA- forward Euler’s approximation, BEA-backward Euler’s approximation,
FE- forward error, BE- backward error [5].
Forward and Backward Euler’s Method Compared to Exact Solution
The |ei| error averages were also computed for both methods and the result was for the
average error for forward Euler’s method was 0.028105 and the average error for the
backward Euler’s method was 0.021015. As it can be seen in both the chart above and the
|ei| error averages that the backward Euler’s method seems to be the more accurate
between the methods [5].

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
121 | P a g e
III. TRANSIENT ANALYSIS OF SEPARATELY EXCITED DC MOTOR
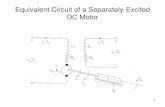
Fig.2 Separately Excited DC Motor (Saber Model)
Where V: applied voltage, : motor current, : induced back emf voltage, : armature
winding inductance, : Armature Resistance, T: motor output torque, : motor output
speed.
Solution of Transient equations of the DC motor drive using Backward Euler’s method

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
122 | P a g e
Using equations (12) and (16) we can carry out the simulation in C-language. Here open
source software ‘Code blocks’ is used for programming.
GNU PLOT:
GNU PLOT is a command line program that can generate two and three dimensional plots of
functions, data and data fits. It is a frequently used for publication-quality graphics as well as
education.
Pseudo Code:
Start of Program
Initialize the value
Open a file to store
current and speed
values
Start of loop execution
continue till the specified
time is encountered
End of execution

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
123 | P a g e
Flow Chart:
Fig. 3 Waveform showing Open loop operation of separately excited DC motor without load
torque.
Fig. 3 shows current and speed waveforms during open loop operation of DC motor drive. In
this case, the motor is operating under no load conditions. The motor current increases
START
Initialize values
For(i=0;i<n,t<=n;i++,t=t+h)
Displaying speed,
current w.r.t time
END
DDD
D

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
124 | P a g e
initially, and reaches its maximum peak. The initial motor current is high as the back emf is
negligible during starting. When the speed of the motor increases and tends towards steady
speed, the value of back emf becomes considerable and thus opposes the supply voltage.
This causes the motor current to decrease and tend towards zero.
Fig. 4 Waveform showing the Open loop operation of separately excited DC motor with load
torque.
Fig. 4 shows the current and speed waveforms during open loop operation of DC motor with
applied torque T= 3 N-m. It is observed that the motor takes more time to attain its steady
speed as compared to that of no load condition. This is because, when the motor is
connected to the supply, the initial value of the current is zero and due to the armature circuit
inductance, it takes some time to reach the load current. And the armature current value
remains finite.
MATLAB (Simulink) model of separately excited DC Motor (without load torque):

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
125 | P a g e
Fig. 5 Matlab(Simulink) model of separately excited DC Motor(without load torque)
Simulink Plots:
Fig. 6 Variation of speed with respect to time

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
126 | P a g e
Fig. 7 Variation of current with respect to time
IV. BRAKING
The term braking comes from the term brake. The brake is an equipment to reduce the
speed of any moving or rotating equipment, like vehicles, locomotives. The process of
applying the brakes can be termed as braking. In braking, the motor works as a generator
developing a negative torque, which opposes the motion [1].
Where, Ia = Armature current
V= Supply voltage
E= Back emf
Ra= Armature resistance
There are three types of braking
Plugging type Braking
Dynamic Braking
Regenerative Braking

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
127 | P a g e
Using GNU Plots for these 3 breaking operations:
Plugging type Braking:
For plugging, the supply voltage of a separately excited motor is reversed so that it assists
the back emf in forcing armature current in the reverse direction. A resistance Ra is also
connected in series with the armature to limit the current. Plugging gives fast braking due to
higher average torque, even with one section of barking resistance Ra. Plugging is highly
inefficient because in addition to the generated power, the power supplied by the source is
also wasted in resistances.
Fig. 8 Plugging Circuit (Saber Model)
Speed and current waveforms of DC motor during plugging is shown in Fig.9. Here motoring
operation is same as that of regenerative braking. In plugging, the voltage applied to the
armature is reversed so that the armature current flows in the reverse direction, therefore the
torque produced is opposite to the earlier torque direction. Hence opposite torque braking is
achieved.

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
128 | P a g e
Fig. 9 Waveform showing motoring and plugging operations
Dynamic Braking:
Shows the current and speed waveform for dynamic braking. When the motor attains the
desired speed, supply voltage to the armature circuit is cut off and an external resistance RB
(10Ω) is connected across the armature. In this case, the motor acts as a generator and
converts kinetic energy stored in moving parts into electrical energy and this energy is
dissipated in the form of heat in the resistor RB. The braking time depends upon the value of
the external resistance connected in parallel to the armature circuit. As shown in Fig.10,
braking with RB= 50Ω is faster compared to that with RB= 10Ω, shown in Fig.11.
Fig. 10 Waveform showing motoring and dynamic braking with RB =50 Ω

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
129 | P a g e
Fig. 11 Waveform showing motoring and dynamic braking with RB =10 Ω
Regenerative Braking:
Regenerative braking operation of the DC motor drive is depicted in Fig.12.When the motor
attains its constant speed, the supply voltage is cut off and switching pulses are reversed.
Thus, the direction of the current will reverse. Later, the motor speed decreases to reach
zero value. In this case, the motor act as a generator and the current stored in the armature
inductance is fed back to the source.

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
130 | P a g e
Fig. 12 Waveform showing motoring and regenerative braking
V. CONCLUSION
Transient behaviour: Plot of current and speed with respect to time is verified both
using GNU plots (both with and without load torque) and MATLAB (Simulink) model (without
load torque) of separately excited DC motor. All 3 types of braking are verified using GNU
plots. In dynamic braking, braking time depends on the value of the resistance, higher the
value of resistance less is the braking time.
Appendix:
Separately excited DC Motor specification:
Sl. No Motor Parameters Values
01. Rated Power (P) 15 hp
02. Rated Voltage ( V) 230V
03. Armature resistance (Ra) 0.5 Ω
04. Armature inductance( La) 0.05H
05. Coefficient of Viscous friction (B) 0.02Nm/rad/sec
06. Moment of inertia (J) 2kg-m2
ACKNOWLEDGEMENTS
We wish to place on record our profound and deep sense of gratitude to our guide
Asst Prof. Javeed Kittur, for his wholehearted guidance without which this endeavour
would not have been possible. Our diction falls short of words to gratify our guide for being
the primary source of inspiration and strength for the project study.
We are grateful to Dr. A. B. Raju, our Head of the Department for their valuable
guidance and encouragement with suggestions and permitting me to carry out my project
work and also for their co-operation throughout the project.

National Conference-NCPE-2k15, organized by KLE Society's Dr. M. S. Sheshgiri College of Engineering &
Technology, Belagavi, Special issue published by Multidisciplinary Journal of Research in Engineering and
Technology, Pg.117-131
131 | P a g e
We are grateful to Dr. Ashok Shettar, our respected principal for having provided us
the academic environment which nurtured our practical skills contributing to the success of
our project.
VI. REFERENCES [1] Types of Braking - Electrical4u.com
[2] Steven C. Chapra & Raymond P. Canale, “Numerical methods for Engineers”, Fourth Edition.
[3] Numeicalanalysis-www.math.niu.edu/~rusin/known-math/index/65.
[4] What is NumericalMethod.
www3.ul.ie/~mlc/support/CompMaths2/files/
[5] Euler'sMethod_www.mathscoop.com(euler)
[6] Gopal K. Dubey, “Fundamentals of Electrical Drives”, Second edition 2002.
[7] Explicit and Implicit Methods In Solving Differential Equations
digitalcommons.uconn.edu/cgi/viewcontent.cgi.
[8] Balaguruswamy, “Programming in ANSI C”.