
Transformation of Elastic constants - IITKhome.iitk.ac.in/~priyansh/p2.pdf · Transformation of...
40
Transformation of Elastic constants ( Derivation ) Transformation of Coordinates General rotation (Eulerian angles) Transformation of Displacement Transformation of Strain Transformation of Stress Transformation due to rotation axis Transformation of elastic constants
Transcript of Transformation of Elastic constants - IITKhome.iitk.ac.in/~priyansh/p2.pdf · Transformation of...

Transformation of Elastic constants(Derivation)
Transformation of Coordinates
General rotation (Eulerian angles)
Transformation of Displacement
Transformation of Strain
Transformation of Stress
Transformation due to rotation axis
Transformation of elastic constants

Transformation of Coordinates
Consider two right handed coordinates systems (X, Y, Z) & (X’, Y’, Z’) rotated arbitrarily wrt
each other.
We can easily link coordinates of any vector S in two frames by simple
definition of vector:
S=Sx x + Sy y+ Sz z where x, y, z and x’, y’, z’ are unit vector
S=S’x x’ + S’y y’+ S’z z’ along (X, Y, Z) and (X’, Y’, Z’) respectively.
S’x= x’.S = (x’.x)Sx + (x’.y)Sy +(x’.z) Sz
S’y= y’.S = (y’.x)Sx + (y’.y)Sy +(y’.z) Sz
S’z= z’.S = (z’.x)Sx + (z’.y)Sy +(z’.z) Sz
In matrix form:
=
2
S’x
S’y
S’z
x’.x x’.y x’.z
y’.x y’.y y’.z
z’.x z’.y z’.z
Sx
Sy
Sz

Rotation matrix T= = where cos(x’,x) is cosine of between
x’ & x.
3
Cos(x’,x) Cos(x’,y) Cos(x’,z)
Cos(y’,x) Cos(y’,y) Cos(y’,z)
Cos(z’,x) Cos(z’,y) Cos(z’,z)
x’.x x’.y x’.z
y’.x y’.y y’.z
z’.x z’.y z’.z

General rotation (Eulerian angles)
Three angles (A,B,C) are required in specifying the mutual orientation of two sets of orthogonal axes.
This can be pictured as three consecutive rotation operations.
1st rotation: a counterclockwise rotation of A about Z
T1 =
2nd rotation: a counterclockwise rotation of B about X’
T2 =
3rd rotation: a counterclockwise rotation of C about Z”
T3=
4
cosA sinA 0
-sinA cosA 0
0 0 1
1 0 0
0 cosB SinB
0 -sinB CosB
cosA sinC 0
-sinC cosC 0
0 0 1

The general rotation is the product of the three individual rotations:
ie Tnet=T3T2T1
Tnet= = T (…say) …………eq. 1
Where l1 = cosA cosC - cosB sinA sinC
m1 = cosC sinA + cosB cosA sinC
n1 = sinB cosC
l2 = -sinC cosA - cosB sinA cosC
m2 = -sinC sinA - cosB cosA cosC
n2 = cosC sinB
l3 = sinB sinA
m3= -sinB cosA
n3= cosB
5
l1 m1 n1
l2 m1 n1
l3 m1 n1

The rotational matrix is orthogonal i.e.
TT = T-1
If = T
Then = TT
6
S’x
S’y
S’z
Sx
Sy
Sz
S’x
S’y
S’z
Sx
Sy
Sz

Transformation of Displacement
Consider that u1 , u2 , u3 are displacement components with respect to the coordinate system x1 , x2 , x3 and u1’ , u2’ , u3’ are those corresponding to the x1’ , x2’ , x3’ system. As displacements are also vectors, similar to coordinates, we can write
= T ……………eq2
7
u1
u2
u3
u1’
u2’
u3’

Transformation of Strain
We have to relate strain components corresponding to the x1' , x2' , x2' coordinates to strain components corresponding to the x1 , x2 , x3 coordinate system.
We have
To obtain 6*6 rotation matrix we have to write each one of the six components of in terms of every six components of
(Using chain rule of differentiation)
….....eq 3.a
where ………obtained by partial differentiation of our rotation matrix (eq1)
Similarly
………. eq 3.b
and
……….eq 3.c 8

We can write u1’ = l1u1 + m1u2 + n1u3 ……….from eq 2
………..differentiating above eq. wrt x1’
substituting Eqs(3.a,3.b,3.c) in above eq., we obtain
or
Thus the coefficients of strain in above eqn. constitutes 1st row of our 6*6 rotation matrix.
Proceeding in a similar way, it can be shown that
(Te=strain transformation matrix)
where Te = …………eq 4
9
T11 T12
T12 T22

With
Errata: 1st and 2nd terms of 2nd column of [T21] should be 2m2m3 & 2m3m1 respectively.
10

Transformation of Stress
For stress transformation we relate stress components in the x1 x2 x3 coordinates to stress components in the x1' x2' x3' coordinates.
We know that work done by stresses due to virtual displacements does not change when computed in two coordinate systems.
So equating the work computed in two coordinate systems
We have
i.e.
where Ts=stress transformation matrix
……..eq 5 and d= volume of body
Thus we have
i.e. Ts is inverse transpose of Te
11

Transformation due to rotation axis
Consider the case of a simple in-plane rotation A about the x3(z) axis.
Rotation matrix is reduced to
T =
Let’s say m=cosA
n=sinA
Then stress and strain transformation matrices take the following forms:
……….from eq1 &eq4
Similarly we can find stress and strain transformation matrices along any arbitrary axis about any angle.12
cosA sinA 0
-sinA cosA 0
0 0 1

Transformation of Elastic Constants
The stress-strain relations are expressed as :
in the x1 x1 x3 coordinates
and in the x1' x2' x3' coordinates
Here we have to find [C’] in terms of [C].
From eq. 5 we have
and also
stiffness matrix is transformed by C’ = [Te] C [Te]T
Proceeding in similar way
compliance matrix is transformed by S’ = [Ts] S [Ts]T
13

Transformation of Elastic constants for Cubic Lattice
Cubic lattices have the highest degree of symmetry of any Bravais lattice.
It contains the following rotation operations:
When these rotation operations are applied to a cubic lattice we get 24 symmetry operators of rotation groups.
Symmetry group Axis of rotations
Identity I
3 equivalent axis of 2Folds rotation
(100),(010),(001)
6 equivalent axis of 4Folds rotation
(100),(010),(001),(-100),(0-10),(00-1)
6 equivalent axis of 2Folds rotation
(110),(101),(011),(1-10),(-101),(01-1)
8 equivalent axis of 3Folds rotation
(111),(-1-1-1),(-111),(1-11),(11-1),(-1-11),(-11-1),(1-1-1)
14

Identity
R1 = 1 0 00 1 00 0 1
Re= Rs =
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
15

2-fold rotation
• About (0,0,1)
R2 = −1 0 00 −1 00 0 1
Re= Rs =
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0
0 0 0 1 1 0
0 0 0 0 0 1
16

2-fold rotation
• About (1,0,0)
R3 = 1 0 00 −1 00 0 −1
Re= Rs =
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0
0 0 0 0 -1 0
0 0 0 0 0 -1
17

2-fold rotation
• About (0,1,0)
R4 = −1 0 00 1 00 0 −1
Re= Rs=
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
18

4-fold rotation
• About (0,0,1)
R5 = 0 1 0−1 0 00 0 1
Re= Rs=
0 1 0 0 0 0
1 0 0 0 0 0
0 0 1 0 0 0
0 0 0 0 -1 0
0 0 0 1 0 0
0 0 0 0 0 1
19

4-fold rotation
• About (0,0,-1)
R6 = 0 −1 01 0 00 0 1
Re= Rs=
0 1 0 0 0 0
1 0 0 0 0 0
0 0 1 0 0 0
0 0 0 0 1 0
0 0 0 -1 0 0
0 0 0 0 0 -1
20

4-fold rotation
• About (1,0,0)
R7 = 1 0 00 0 10 −1 0
Re= Rs=
1 0 0 0 0 0
0 0 1 0 0 0
0 1 0 0 0 0
0 0 0 -1 0 0
0 0 0 0 0 -1
0 0 0 0 1 0
21

4-fold rotation
• About (-1,0,0)
R8 = 1 0 00 0 −10 1 0
Re= Rs=
1 0 0 0 0 0
0 0 1 0 0 0
0 1 0 0 0 0
0 0 0 -1 0 0
0 0 0 0 0 1
0 0 0 0 -1 0
22

4-fold rotation
• About (0,1,0)
R9 = 0 0 −10 1 01 0 0
Re= Rs=
0 0 1 0 0 0
0 1 0 0 0 0
1 0 0 0 0 0
0 0 0 0 0 1
0 0 0 0 -1 0
0 0 0 -1 0 0
23

4-fold rotation
• About (0,-1,0)
R10 = 0 0 10 1 0−1 0 0
Re= Rs=
0 0 1 0 0 0
0 1 0 0 0 0
1 0 0 0 0 0
0 0 0 0 0 -1
0 0 0 0 -1 0
0 0 0 1 0 0
24

2-fold rotation
• About (1,1,0)
R11 = 0 1 01 0 00 0 −1
Re= Rs=
25

2-fold rotation
• About (1,0,1)
R12 = 0 0 10 −1 01 0 0
Re= Rs=
0 0 1 0 0 0
0 1 0 0 0 0
1 0 0 0 0 0
0 0 0 0 0 -1
0 0 0 0 1 0
0 0 0 -1 0 0
26

2-fold rotation
• About (0,1,1)
R13 = −1 0 00 0 10 1 0
Re= Rs=
1 0 0 0 0 0
0 0 1 0 0 0
0 1 0 0 0 0
0 0 0 1 0 0
0 0 0 0 0 -1
0 0 0 0 -1 0
27

2-fold rotation
• About (1,-1,0)
R14 = 0 1 01 0 00 0 1
Re= Rs=
0 1 0 0 0 0
1 0 0 0 0 0
0 0 1 0 0 0
0 0 0 0 1 0
0 0 0 1 0 0
0 0 0 0 0 1
28

2-fold rotation
• About (1,0,-1)
R15 = 0 0 −10 −1 0−1 0 0
Re= Rs=
0 0 1 0 0 0
0 1 0 0 0 0
1 0 0 0 0 0
0 0 0 0 0 1
0 0 0 0 1 0
0 0 0 1 0 0
29

2-fold rotation
• About (0,1,-1)
R16 = 1 0 00 0 10 1 0
Re= Rs=
1 0 0 0 0 0
0 0 1 0 0 0
0 1 0 0 0 0
0 0 0 1 0 0
0 0 0 0 0 1
0 0 0 0 1 0
30
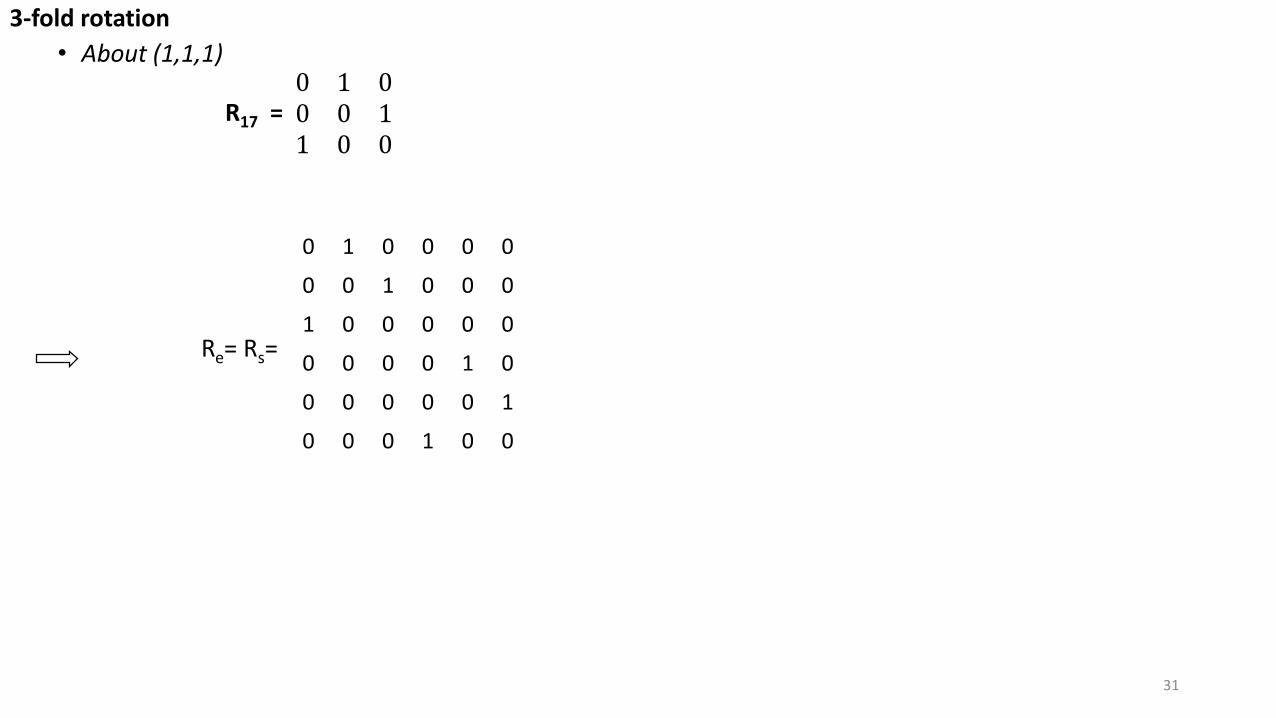
3-fold rotation
• About (1,1,1)
R17 = 0 1 00 0 11 0 0
Re= Rs=
0 1 0 0 0 0
0 0 1 0 0 0
1 0 0 0 0 0
0 0 0 0 1 0
0 0 0 0 0 1
0 0 0 1 0 0
31

3-fold rotation
• About (-1,-1,-1)
R18 = 0 0 11 0 00 1 0
Re= Rs=
0 0 1 0 0 0
1 0 0 0 0 0
0 1 0 0 0 0
0 0 0 0 0 1
0 0 0 1 0 0
0 0 0 0 1 0
32

3-fold rotation
• About (1,1,-1)
R19 = 0 0 −11 0 00 −1 0
Re= Rs=
0 0 1 0 0 0
1 0 0 0 0 0
0 1 0 0 0 0
0 0 0 0 0 -1
0 0 0 1 0 0
0 0 0 0 -1 0
33

3-fold rotation
• About (1,-1,1)
R20 = 0 0 1−1 0 00 −1 0
Re= Rs=
0 0 1 0 0 0
1 0 0 0 0 0
0 1 0 0 0 0
0 0 0 0 0 1
0 0 0 -1 0 0
0 0 0 0 -1 0
34
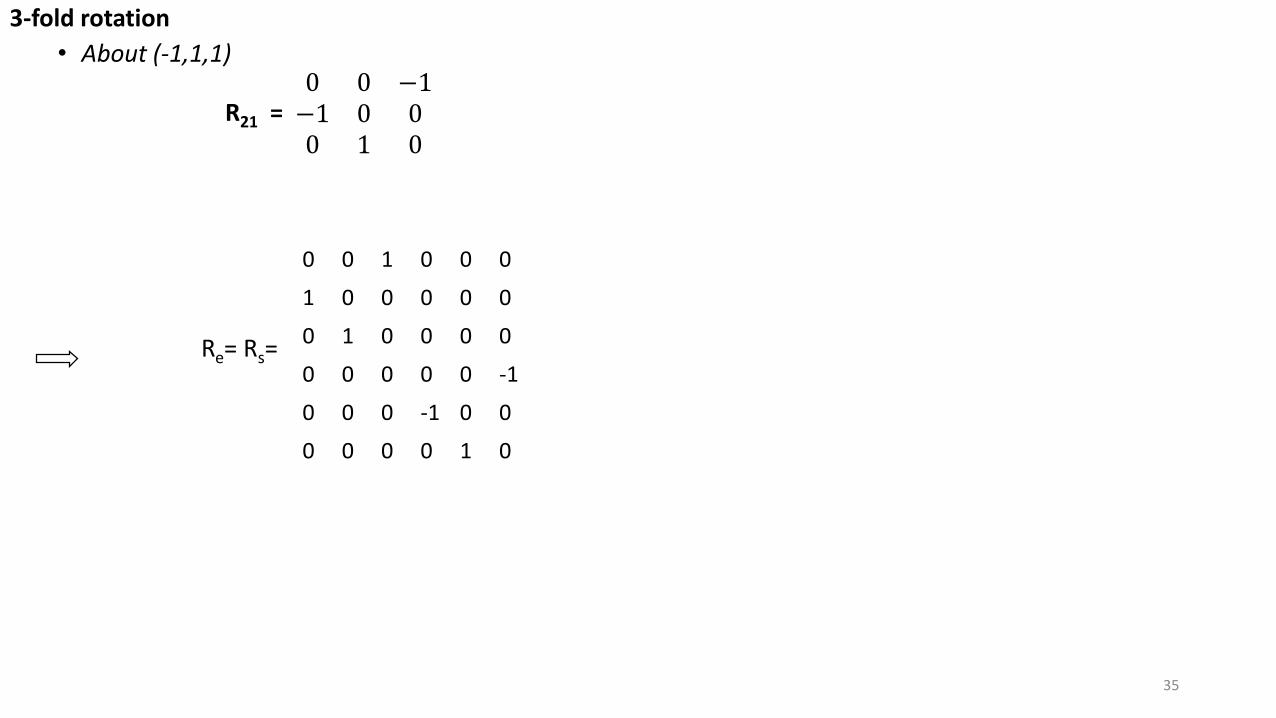
3-fold rotation
• About (-1,1,1)
R21 = 0 0 −1−1 0 00 1 0
Re= Rs=
0 0 1 0 0 0
1 0 0 0 0 0
0 1 0 0 0 0
0 0 0 0 0 -1
0 0 0 -1 0 0
0 0 0 0 1 0
35

3-fold rotation
• About (-1,-1,1)
R22 = 0 1 00 0 −1−1 0 0
Re= Rs=
0 1 0 0 0 0
0 0 1 0 0 0
1 0 0 0 0 0
0 0 0 0 1 0
0 0 0 0 0 -1
0 0 0 -1 0 0
36

3-fold rotation
• About (1,-1,-1)
R23 = 0 −1 00 0 1−1 0 0
Re= Rs=
0 1 0 0 0 0
0 0 1 0 0 0
1 0 0 0 0 0
0 0 0 0 -1 0
0 0 0 0 0 1
0 0 0 -1 0 0
37

3-fold rotation
• About (-1,1,-1)
R24 = 0 −1 00 0 −11 0 0
Re= Rs=
where R1,2,3…….24 are transformation matrix of symmetry groups and Re & Rs are strain and stress transformation matrix respectively
0 1 0 0 0 0
0 0 1 0 0 0
1 0 0 0 0 0
0 0 0 0 -1 0
0 0 0 0 0 -1
0 0 0 1 0 0
38

Conclusion:
Using S’= Re S ReT
C’= Rs C RsT for all above 24 rotation operators we can find that C’ & S’ will remain same in all case.
i.e. S’=S
C’=C
Therefore in case of cubic lattice compliance and stiffness transformation matrix would remain same for all 24 symmetry operators of rotation group .
Note : For calculation of rotation matrix I have considered counter-clockwise rotation.
39

-Priyanshu Jain
40



![Phonons and elastic constants including vdW interactions · Elastic constants and vdW For black phosphorus (layered material): Elastic constants [GPa] c 33 c 22 c 55 PBE13.040.72.6](https://static.fdocuments.in/doc/165x107/605819f33bcf9d59f9527660/phonons-and-elastic-constants-including-vdw-interactions-elastic-constants-and-vdw.jpg)














