TOPIC 3 - Chinhoyi University of Technology · DC Generator Characteristics It can be seen from the...
54
TOPIC 3 DC MACHINES
Transcript of TOPIC 3 - Chinhoyi University of Technology · DC Generator Characteristics It can be seen from the...

TOPIC 3
DC MACHINES

Emf equation of a DC generator
2

Emf equation of a DC generator
3

Emf equation of a DC generator
4

Eg = KFN;
Where :
Eg = generated voltage;
K = fixed constant;
F= magnetic flux strength;
N = speed in RPM
5
EMF Equation of DC Generator

CHARACTERISTICS OF DC GENERATOR
6

DC Generator Characteristics In general, two characteristics specify the
steady-state performance of a DC generators:
1.Open-circuit characteristics: generated voltage versus field current at constant speed.
2.External characteristic: terminal voltage versus load current at constant speed.

Open circuit characteristic of shunt generator
8

DC Generator Characteristics
It can be seen from the load characteristics of a dc shunt generator that the terminal voltage falls slightly as the load current increases.
Load characteristics of shunt generator

10
Characteristics of dc compound generator

Voltage Regulation
Voltage regulation is defined as the percentage change in terminal voltage when the DC generator is loaded from no-load to full load.
11
100
t
tG
V
VEregulationVoltage
Where: EG = generated voltage
Vt = terminal Voltage

DC Motor
12

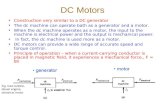
IntroductionA motor is a machine that converts electrical
energy into mechanical energy.
It is very similar to dc generator in construction.
Generators are usually operated in more protected locations and therefore their construction is generally of open type.
13

Introduction
Motors are used in locations where they are exposed to dust, moisture, fumes and mechanical damage.
Thus, motors require protective enclosures for example, drip proof, fire proof etc.
14

15
Principles of Operation
Conversion of electrical energy to mechanical energy is called motor action
Two requirements for motor action:
Current flow through a conductor
A force on the conductor develops This force is produced when the conducting wire is placed
inside the magnetic field formed between two magnetic poles

16
The Right-hand Rule
The Fleming’s left hand rule is used to determine the direction that conductor carrying current will be moved in a magnetic field

17
Rotary Motion
Current-carrying conductor in a magnetic field will tend to move at right angles to the field
The reaction of the wire to the field produces torque

18
Continuous Rotation
Achieved by reversing the direction of current flow in a wire
Current change is provided by a switching device called a commutator
The commutator and loop form the armature

19
DC Motor Operation
Switching action of the brushes and commutator to produce unidirectional torque

Simple DC Machines

Counter or back-electromotive force the armature rotates , the conductors cut the magnetic
lines of force in the magnetic field.
Voltage is induced in the armature conductors.
This induced voltage acts counter to applied voltage; therefore, it is called counter-electromotive force or back emf.
Since back emf is induced due to generator action its magnitude is the same as generated emf in generator:
21
Eb = kFN

Torque of DC Machine
When a dc machine is loaded either as a motor or generator, the rotor conductors carry current.
Since the conductors lie in the magnetic field created in the air gap, they experience a force.
Torque (turning effect) is developed on the rotor and the rotor starts rotating.
22

Torque of DC Machine
23
When the machine operates as a generator at constant speed, the torque is equal and opposite that provided by the prime mover.
When the machine operates as a motor the torque is transferred to the shaft of the rotor and drives the mechanical load.

Torque of DC MachineDEDUCTION OF THE TORQUE EQUATION
Voltage equation of dc Motor: V = E + IaRa
multiplying both sides by Ia : VIa=EIa+Ia2Ra
where: VIa = electrical power input to the armature
I2Ra =copper losses in the armature
Eia = electrical equivalent of gross mechanical
power developed by the armature
Let T = average electromagnetic torque developed by the armature
At this value of torque the electro-mechanical power conversion takes place
24

Torque of DC Machine
25
Mechanical power developed by the armature:
Therefore,
ButTherefore
TORQUE EQUATION OF DC MOTOR:
Hence torque developed by a DC motor is directly proportional to the flux per pole and the armature current

Speed of DC Machine
26
The emf equation of a DC machine is given by:
Solving for N gives:
The above equation shows that the speed of a dc machine is directly proportional to the emf of rotation E and inversely proportional to the flux per pole Φ

Speed Regulation
27
The SPEED REGULATION is defined as the change in speedfrom no load to full load expressed as a fraction or apercentage of the full load speed.
A motor which has a nearly constant speed is said to have a good speed regulation

Characteristics of DC Motor
We distinguish the following threecharacteristics of a dc motor:
Variation of speed N with the armature current Ia
Variation of the torque T with the armature current Ia
Variation of speed N with the torque loading T
28

Characterisics of Shunt motor
29
T α ΦIa Tα Ia
Since Φ is constantTherefore as IaN
Speed - Armature current curve Torque - Armature current curve

Characteristics of Shunt motors
30
The speed N of themotor decrease slightlywith the increase intorqueSince the drop in speedfrom no load to full loadis very small, a shuntmotor may be taken as aconstant speed motor forall practical purposes
Torque - Speed curve

Series motor characteristics
31
Series motor: IA = IF
After saturation :
T α ΦIa
Since Φ 𝜶 IAT α Ia
2
Φ = constant T α Ia
Since IA(RA+RF) is negligible at low values of IA
V constant Φ𝜶 IA
Torque - Armature current curve Speed - Armature current curve

Series motor characteristics
The speed/armature current characteristic shows that when the load is small, the speed will be very high.
Therefore at no load or light loads there is a possibility of dangerously high speeds, which may damage the motor due to large centrifugal forces.
Hence series motor must never be unloaded.
It should always be coupled to a mechanical load either directly or through gearing.
It should never be coupled by belt, which may break at any time.
32

Characteristic of Series motor
33
Characteristic shows that dc seriesmotor has high torque at low speedand low torque at high speedsSpeed of dc series motor changesconsiderably with increasing loadand that is why series motor isreferred to as Variable speed motorIt is useful characteristic fortraction purposes, hoists and liftswhere at low speeds a high startingtorque is required to accelerate largemasses
Torque – Speed curve

Characteristics of compound motor
34
Compound motor characteristics are intermediate between the shunt and series motorsTorque/speed of compound motor shows that the motor has high starting torque together with a safe no-load speed.Suitable for use with intermittent loads such as lifts, hoists etc.

Speed control of DC Motors
The speed of a dc motor is given by the relationship:
The equation shows that the speed is dependent on the supply voltage V, the circuit resistance Ra, and the field flux Φ, which is produced by the field current.
In practice variation of the three factors is used for speed control.
35

Speed control of DC Motors
There are three basic methods of speed control of dc motors:
Variation of the resistance in the armature circuit.
ARMATURE RESISTANCE CONTROL.
Variation of the field flux Φ.
FIELD RESISTANCE CONTROL.
Variation of the applied voltage.
36

At stand-still, w = 0 Ea = 0
a
ta
R
VI
eg, Vt = 100, Ra = 0.1 Ia = 1000 A !
+
Vt
–
Ia
Ra
DC Motor Starters
37
A Starter is a device used to start and accelerate a motor
Need for Starters
The armature current of a motor is given by:
The large current would damage the brushes, commutator or windings!

Starter in DC Motor
We can limit Ia at start-up by:
1) Controlling Vt using variable supply –
e.g. using power electronics converter
As speed builds up (so too Ea), Rst is gradually reduced
+
Vt
–
Ia
sta
ta
RR
VI
+
Ea
–
When Ea = 0
2) Adding external resistor known as starter
Ra
Rst
38

Starter in DC MotorAs speed builds up (so too Ea), Rst is gradually reduced
1 2 3 4
Starter circuit1 2 3 4
Ia
t (s)
t (s)
speed
Imax
Imin
39

Manually operated DC Motor Starter
40
No-Volt-Coil
Spring

DC Shunt motor starter
Prior to starting , the handle is in the OFF position.
To start the motor , the handle is moved manually and when it makes contact with the resistance stud 1 it is in the start position.
In this position the field winding receives the full supply voltage, but the armature current is limited by the graded resistance R(=R1+R2+R3+R4)
The starter handle is then gradually moved from stud to stud, allowing the speed of the motor to build up until it reaches the RUN position.
41

DC Shunt motor starter
In this position: (i) motor attains full speed
(ii) resistance R is completely cut
The handle is held in RUN position by electromagnet energised by a no-volt coil (NVC).
In the event of switching OFF or complete failure of supply the NVC is de-energised.
This results in the release of the handle , which is then pulled back to OFF position by the action of a spring.
The NVC also provides protection against an open circuit in the field winding which cause a very large current to flow as a result full line voltage applied across armature.
42

Advantages of DC Motors The greatest advantage of DC motors may be speed control.
Since speed is directly proportional to armature voltage and inversely proportional to the magnetic flux produced by the poles, adjusting the armature voltage and/or the field current will change the rotor speed.
Today, adjustable frequency drives can provide precise speed control for AC motors, but they do so at the expense of power quality, as the solid-state switching devices in the drives produce a rich harmonic spectrum.
The DC motor has no adverse effects on power quality.
43

Disadvantages of DC Motors Power supply, initial cost, and maintenance requirements are
the negatives associated with DC motors
Rectification must be provided for any DC motors supplied from the grid. It can also cause power quality problems.
The construction of a DC motor is considerably more complicated and expensive than that of an AC motor, primarily due to the commutator, brushes, and armature windings.
An induction motor requires no commutator or brushes, and most use cast squirrel-cage rotor bars instead of true windings — two huge simplifications.
44

DC machine ratings
Voltage
Current
Power
Speed
45
DC machine has four main ratings:

EFFICIENCYOF
DC MACHINES
46

The losses in DC motorsThere are five categories of losses occurring in DC machines:
1. Electrical or copper losses – the resistive losses in the armature and field windings of the machine.
Armature loss: 2
A A AP I R
Field loss: 2
F F FP I R
Where IA and IF are armature and field currents and RA and RF are armature and field (winding) resistances usually measured at normal operating temperature.

Losses in DC machines
2. Brush (drop) losses – the power lost across the contact potential at the brushes of the machine.
BD BD AP V I(5.38.1)
Where IA is the armature current and VBD is the brushvoltage drop. The voltage drop across the set of brushesis approximately constant over a large range of armaturecurrents and it is usually assumed to be about 2 V.

Losses in DC machines
4. Mechanical losses – losses associated with mechanical effects: friction (friction of the bearings) and windage (friction between the moving parts of the machine and the air inside the casing). These losses vary as the cube of rotation speed n3.
3. Core losses – hysteresis losses and eddy current losses. They vary as B2 (square of flux density) and as n1.5 (speed of rotation of the magnetic field)
5. Stray (Miscellaneous) losses – losses that cannot be
classified in any of the previous categories. They are usually due to inaccuracies in modeling. For many machines, stray losses are assumed as 1% of full load.

Efficiency of DC machinesUnfortunately, not all electrical power is converted to mechanicalpower by a motor and not all mechanical power is converted toelectrical power by a generator…
The EFFICIENCY of a DC machine is:
100%out
in
P
P
100%in loss
in
P P
P
or

The power-flow diagramThe most convenient technique to account for power losses in a machine is the power-flow diagram.
For a DC motor:
Electrical power is input to the machine, and the electrical and brush losses must be subtracted. The remaining power is ideally converted from electrical to mechanical form at the point labeled as Pconv.

The power-flow diagramThe electrical power that is converted is
conv A AP E I
And the resulting mechanical power is
conv ind mP w
After the power is converted to mechanical form, the stray losses, mechanical losses, and core losses are subtracted, and the remaining mechanical power is output to the load.

Power flow diagram in DC Machines
Input from
prime-mover
Elec-magnetic
Power =EaIa
Arm. terminal
power = Vta Ia
Output power
= Vt IL
No-load rotational loss (friction
+windage+core)+stray load loss
Arm. copper loss
Ia2Ra+brush contact loss
Series field loss IL2Rs
+shunt field loss If2Rf
Input power from
mains =Vt IL
Elec-magnetic
Power =EaIa
Arm. terminal
power = Vta Ia
Output available
at the shaft
No-load rotational loss (friction
+windage+core)+stray load loss
Arm. copper loss
Ia2Ra+brush contact loss
Series field loss IL2Rs
+shunt field loss If2Rf
DC Motor
DC Generator

54
Next Topic…SYNCHRONOUS MACHINES