Time-Optimal Attitude Control of Spinning Solar Sail by ... Time-Optimal Attitude Control of...
6
1 Time-Optimal Attitude Control of Spinning Solar Sail by Reflectivity Control Kenshiro Oguri 1 , Takuro Furumoto 1 , Ryu Funase 1 1) Department of Aeronautics and Astronautics, The University of Tokyo, Tokyo, Japan Abstract As a free-propellant attitude control system of solar sail spacecraft, Reflectivity Control Device (RCD) is proposed and has demonstrated on orbit by the world-first solar sail, IKAROS. By utilizing RCD, which varies reflectivity of its surface by electric power, the spacecraft can generate Solar Radiation Pressure (SRP) toque on its sail. Prior researches indicate that the attitude motion track of spinning solar sail affected by SRP describes a spiral motion around the equilibrium point and the attitude control by RCD causes the translation of the attitude equilibrium point. However, due to the large time constant of the spiral motion, simple control method, in which the equilibrium point is just shifted to the target attitude, takes too much time for completing attitude maneuver and is not practical to use. Therefore, this research has considered the effective control, and this paper proposes a feed-back control method utilizing the property of Lyapunov function, and discusses the capability of the control method. 膜面反射率制御によるスピン型ソーラーセイルの 最短時間姿勢制御 摘要 ソーラーセイルの燃料フリー姿勢制御機構として,表面の反射特性を変化させセイルに太陽 輻射圧トルクを発生させる可変反射率デバイス(RCD: Reflectivity Control Device)が提案されて おり,世界初のソーラーセイル IKAROS で実証された.太陽輻射圧下のスピン型ソーラーセイ ルの姿勢は,平衡姿勢周りの螺旋運動であり,RCD を用いた姿勢制御は平衡姿勢をシフトさ せることに相当することが従来研究で明らかになっている.しかし,螺旋運動の時定数は非常 に大きいため,単純に平衡姿勢をシフトさせるだけの姿勢制御手法では姿勢マヌーバに大きな 時間を要してしまい,実用的ではない.そこで本研究では,より効率的に姿勢制御を行う方法 について検討してきた.その一連の検討の内,本論文では Lyapunov 関数の性質を利用した Feed Back 制御則を提案し,その有用性について議論する. Nomenclature , , : parameters describing deformation of the membrane of sail : the right ascension of the spin axis direction respect to the inertial frame : the declination of the spin axis direction respect to the inertial frame I : moment of inertia : phase of RCD switching u : duty ratio parameter of RCD : spin rate of a solar sail X : state vector : error vector between present state vector and target one , : changes of sail parameters by RCD !"# : change of specular coefficient by RCD !"# : change of diffusive coefficient by RCD Subscripts s : sun direction, spin axis (only for ! ) ~ : difference between the sunward direction and the spin axis direction eq : equilibrium point target : target angle * : indicating the required control input x, y : x or y component of vector 1. Introduction A solar sail has been proposed as one of the ideal spacecraft for the solar system exploration since about one hundred years ago [1]. It is because that the solar sail spacecraft, which deploys a large membrane in space and gets acceleration by utilizing Solar Radiation Pressure (SRP) force as thrust, does not require any fuel for propulsion. Its propellant-free characteristic enables longer and father space voyage compared with the conventional spacecraft, whose limit of total delta V depends on their mounted fuel. So far, various types of solar sails have been studied by many organizations such as JAXA, NASA, and ESA. Mainly, there are two types of solar sails. One is the rigid-type solar sail, which has rigid structure to deploy and support the
Transcript of Time-Optimal Attitude Control of Spinning Solar Sail by ... Time-Optimal Attitude Control of...

1
Time-Optimal Attitude Control of Spinning Solar Sail
by Reflectivity Control
Kenshiro Oguri1, Takuro Furumoto1, Ryu Funase1
1)Department of Aeronautics and Astronautics, The University of Tokyo, Tokyo, Japan
Abstract
As a free-propellant attitude control system of solar sail spacecraft, Reflectivity Control Device (RCD) is proposed and has demonstrated on orbit by the world-first solar sail, IKAROS. By utilizing RCD, which varies reflectivity of its surface by electric power, the spacecraft can generate Solar Radiation Pressure (SRP) toque on its sail. Prior researches indicate that the attitude motion track of spinning solar sail affected by SRP describes a spiral motion around the equilibrium point and the attitude control by RCD causes the translation of the attitude equilibrium point. However, due to the large time constant of the spiral motion, simple control method, in which the equilibrium point is just shifted to the target attitude, takes too much time for completing attitude maneuver and is not practical to use. Therefore, this research has considered the effective control, and this paper proposes a feed-back control method utilizing the property of Lyapunov function, and discusses the capability of the control method.
膜面反射率制御によるスピン型ソーラーセイルの
最短時間姿勢制御
摘要 ソーラーセイルの燃料フリー姿勢制御機構として,表面の反射特性を変化させセイルに太陽輻射圧トルクを発生させる可変反射率デバイス(RCD: Reflectivity Control Device)が提案されており,世界初のソーラーセイル IKAROSで実証された.太陽輻射圧下のスピン型ソーラーセイルの姿勢は,平衡姿勢周りの螺旋運動であり,RCD を用いた姿勢制御は平衡姿勢をシフトさせることに相当することが従来研究で明らかになっている.しかし,螺旋運動の時定数は非常に大きいため,単純に平衡姿勢をシフトさせるだけの姿勢制御手法では姿勢マヌーバに大きな時間を要してしまい,実用的ではない.そこで本研究では,より効率的に姿勢制御を行う方法について検討してきた.その一連の検討の内,本論文では Lyapunov関数の性質を利用した Feed Back制御則を提案し,その有用性について議論する.
Nomenclature 𝐴,𝐵,𝐶 : parameters describing deformation of the
membrane of sail 𝛼 : the right ascension of the spin axis
direction respect to the inertial frame 𝛿 : the declination of the spin axis direction
respect to the inertial frame I : moment of inertia 𝜙 : phase of RCD switching u : duty ratio parameter of RCD 𝛺 : spin rate of a solar sail X : state vector 𝛿𝑿 : error vector between present state vector
and target one 𝛥𝐴,𝛥𝐵 : changes of sail parameters by RCD 𝛥𝐶!"# : change of specular coefficient by RCD 𝛥𝐶!"# : change of diffusive coefficient by RCD
Subscripts
s : sun direction, spin axis (only for 𝐼!)
~ : difference between the sunward direction and the spin axis direction
eq : equilibrium point target : target angle
* : indicating the required control input x, y : x or y component of vector
1. Introduction A solar sail has been proposed as one of the ideal spacecraft for the solar system exploration since about one hundred years ago [1]. It is because that the solar sail spacecraft, which deploys a large membrane in space and gets acceleration by utilizing Solar Radiation Pressure (SRP) force as thrust, does not require any fuel for propulsion. Its propellant-free characteristic enables longer and father space voyage compared with the conventional spacecraft, whose limit of total delta V depends on their mounted fuel.
So far, various types of solar sails have been studied by many organizations such as JAXA, NASA, and ESA. Mainly, there are two types of solar sails. One is the rigid-type solar sail, which has rigid structure to deploy and support the

2
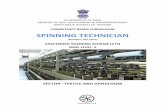
flexible large thin membrane, and the other is the spin-type solar sail, which deploys and keeps the membrane utilizing the centrifugal force generated by spin motion and does not have structural element such as the rigid type has. Comparing these two types, the spin-type solar sail weighs less than the rigid type and can implement almost the same mass/area ratio as the membrane material, which means that the spin-type solar sail can be an efficient photon propulsion system. On the other hand, however, the spin-type solar sails have some disadvantages regarding attitude control. First, much fuel consumption is required for changing the attitude of spin-type solar sail as it has large angular momentum of the spinning large membrane. Second, the attitude motion with flexible membrane is complicated. The deformation of the flexible membrane kept by only centrifugal force is difficult to estimate. As a solution for the first disadvantage mentioned above, Reflectivity Control Device (RCD), which can generate torque for attitude change by electric power, has been proposed and already been demonstrated on orbit [2] by IKAROS developed by JAXA. The mechanism of generating torque by RCD is described in Fig. 1. RCD is the thin-film device that can change the character of reflectivity of its surface. By applying certain voltage to RCD attached on the outer edges of the sail membrane, the magnitude of SRP force working on each edge of the sail becomes unbalanced and SRP torque for attitude change can be generated. Thus, by utilizing RCD, a spinning solar sail can change its attitude without consuming any fuel.
Figure 1. Concept picture of attitude control with RCD[2]
For a solution of the second disadvantage, Generalized Spinning Sail Model (GSSM) is proposed in paper [3]. GSSM is an attitude motion model which describes the attitude motion of a spinning solar sail considering the deformation of the membrane of sail. GSSM describes the sail’s attitude motion with the sail deformation by only three parameters, and shows that the sail’s spin axis direction converges towards around the sun direction [3]. Although GSSM succeeds in describing the attitude motion with the sail deformation simply, it doesn’t consider the control of RCD. But in order to make advantage of RCD as mentioned above, the model of the attitude motion of a spinning solar sail with RCD control is necessary. To describe it, Furumoto has extended GSSM to the model considering RCD control
[4]. By the model proposed by Furumoto, the method of changing the convergent point of the spin axis direction of a spinning solar sail arbitrary in certain range around the sunward direction by RCD control can be obtained [4]. However, an attitude change implemented by the method of changing the convergent point as mentioned above takes much time and its history describes like a roundabout way towards the target attitude. When it comes to considering both of the attitude and orbital control of a spinning solar sail with RCD, that method have two problems. First, it takes too much time. Second, the history of attitude for maneuver goes a long way round. They are because that a solar sail always generates thrust, and the thrust direction is mainly determined by the sail’s transient attitude motion under SRP. In order to consider both of the attitude and orbital control, it is required that the attitude maneuver is fast and direct enough to regard the thrust generated during the maneuver as minute value. Therefore, this study proposes a fast and direct attitude control method for a spinning solar sail with RCD control. To evaluate the optimality of the proposing method, this study compares the result with the solution by an optimization method, DCNLP (Direct Collocation with Non-Linear Programming). Further, to confirm the efficiency of the method for the orbital control, this study shows applying the attitude maneuver by the method to a practical orbital control. 2. Model for the attitude motion of a spinning solar sail 2.1. Definitions of the variables
This section defines the variables for describing the sail’s attitude. As the description of the attitude of a spinning solar sail, whose shape is axial symmetry around the spin axis, it is reasonable to consider that the spin axis direction of the sail represents its attitude. As shown in Fig. 2, 𝛼 𝑎𝑛𝑑 𝛿 are the angles formed by the spin axis direction and the inertial reference frame, and 𝛼! 𝑎𝑛𝑑 𝛿! are the angles formed by sunward direction and the inertial reference frame. When discussing the attitude maneuver, 𝛼 𝑎𝑛𝑑 𝛿 are state variables. Control variables of RCD are 𝑢,𝜙!,𝜙! as shown in Fig. 3. 𝜙! indicates the phase of starting turning on RCD, 𝜙! indicates the period during which RCD is turned on, and u is the RCD’s duty ratio parameter.
Figure 2. The representation of the attitude of the solar sail and sun direction in the inertial frame

3
Figure 3. The representation of the control variable of RCD
2.2. Generalized Spinning Sail Model (GSSM) [3] This section introduces a model of attitude motion of a spinning solar sail, GSSM. Though there are some models describing the attitude motion of a solar sail with the sail deformation [5][6], these models employ many parameters for describing the attitude motion, which makes difficult to consider the motion simply. By assuming the spin-type solar sail, GSSM [3] can regard the equation of the attitude motion as spin-averaged form and succeeds in describing it by only three parameters. GSSM describes the attitude motion of a spinning solar sail as follows:
𝑑𝑑𝑡
𝛼𝛿𝛺
=1𝐼!
1𝛺𝑐𝑜 𝑠 𝛿 0 0
01𝛺 0
0 0 1
𝑇!𝑇!𝑇!
=
𝐴𝐼!𝛺
−𝐵𝐼!𝛺
0
𝐵𝐼!𝛺
𝐴𝐼!𝛺
0
0 0𝐶𝐼!
𝛼 − 𝛼!𝛿 − 𝛿!1
(1)
when leading this formula Eq. (1), follows are assumed:
α − α! ≪ 1, δ − δ! ≪ 1, δ ≪ 1 (2)
The conditions indicated Eq. (2) say that the spin axis direction is near the sunward direction and the spacecraft always goes approximately on the ecliptic plane. In Eq. (1), A, B, C are the constant parameters determined by the sail deformation. From Eq. 1, the attitude motion of a spinning solar sail is described as converging towards around sunward direction. One thing that should be noted is that GSSM doesn’t consider the control of RCD. 2.3. Extended form of GSSM with RCD [4] This section introduces the model of the attitude motion extended from GSSM for considering RCD control. The model considering RCD control is written as follows:
𝑑𝑑𝑡 𝛼𝛿
=1𝐼!𝛺
𝐴 + 𝑢𝛥𝐴 − 𝐵 + 𝑢𝛥𝐵𝐵 + 𝑢𝛥𝐵 𝐴 + 𝑢𝛥𝐴
𝛼 − 𝛼! + 𝛥𝛼!"𝛿 − 𝛿! + 𝛥𝛿!"
(3)
𝛥𝛼!"𝛥𝛿!"
= 𝑢−𝑠𝑖𝑛𝜙! − 𝑐𝑜𝑠𝜙!𝑐𝑜𝑠𝜙! −𝑠𝑖𝑛𝜙!
𝐴 + 𝑢𝛥𝐴 − 𝐵 + 𝑢𝛥𝐵𝐵 + 𝑢𝛥𝐵 𝐴 + 𝑢𝛥𝐴
!! 𝐻!𝐻!
(4)
Additional assumptions when leading Eq. (3) and (4) are follows:
𝜙! = 𝜋 = 𝑐𝑜𝑛𝑠𝑡 ,Ω = 𝑐𝑜𝑛𝑠𝑡 (5)
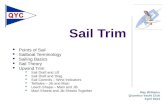
The reasons for the assumptions in Eq. (5) are that fixing ϕ! as π is qualitatively considered not to affect the capability of attitude maneuver, and Ω can be regarded as constant in the short term such as an attitude maneuver ordinarily requires. One thing that should be noted is that some fuel is required for keeping the spin rate constant. In Eq. (3) and (4), 𝛥𝐴,𝛥𝐵,𝐻!,𝐻! are parameters depending on characteristics of RCD and its way of attachment. By this model, the method of changing the convergent point of the attitude motion of a spinning solar sail using RCD can be obtained. Fig. 4 shows a comparison of the attitude motion with RCD control and that without RCD. Fig. 4 also indicates the range where the convergent point of the attitude can be changed by RCD control.
Figure 4. Comparison of the attitude motion with and without RCD control
As shown in Fig. 4, the history of attitude change by the method mentioned above describes the roundabout way towards the target attitude. Moreover, it takes over 120[days] to finish the attitude change. Because a solar sail always generates thrust which is mainly determined by its attitude, the roundabout way and the slowness of the attitude maneuver are not desirable to consider both of the attitude and orbital control simultaneously. Thus, at the next chapter, this paper proposes a method for fast and direct attitude maneuver.

4
3. Lyapunov Feedback Control Method (LFCM) First, this chapter explains the feedback control method utilizing the character of Lyapunov Function, which is mentioned in paper [7]. Next, this chapter indicates the derivation of Lyapunov Feedback Control Method, which is named in this paper as LFCM. 3.1. The characteristic of Lyapunov Function When there is a non-linear system: 𝑥 = 𝑓(𝑥), about certain scalar function V(x), if the next equation Eq. (6) is negative semi-definite, V(x) is Lyapunov Function.
𝑉.𝑥 =
𝑑𝑉 𝑥 𝑡𝑑𝑡 =
𝜕𝑉 𝑥𝜕𝑥
!
𝑓(𝑥) (6)
Inversely, if V(x) is Lyapunov Function, x such as making 𝑉.𝑥 ≤ 0 can be chosen at the time.
By employing this characteristic of Lyapunov Function, choosing the control input decreasing the value of the function is capable. In this study, this characteristic is utilized for feedback control of a non-linear equation, that is, an equation of the attitude motion of a spinning solar sail. 3.2. Derivation of LFCM
Take state vector as 𝑿 = [𝛼~, 𝛿~] ≡ 𝛼 − 𝛼!, 𝛿 − 𝛿! !, and
think 𝛿𝑿 as error vector between the present state vector and the target one, then consider the norm of 𝛿𝑿 as the candidate of Lyapunov Function described as following equations: Eq. (7) and (8).
𝑉 𝑥 = 𝛿𝑋!𝛿𝑋 (7)
𝛿𝑋 =𝛼~− 𝛼
~!"#$%!
𝛿~− 𝛿
~!"#$%!
(8)
Then, the required control inputs minimizing the norm of 𝛿𝑋 are 𝑢∗,𝜙∗ , which minimize the next equation Eq. (9).
𝑑𝑉𝑑𝑡 = 𝛿𝑋!
𝑑𝑋𝑑𝑡 = 𝛼
~− 𝛼
~!"#$%! , 𝛿
~− 𝛿
~!"#$%!
𝛼~.
𝛿~.
(9)
𝑢∗,𝜙∗ can be considered as optimal control inputs in terms of minimizing the norm of 𝛿𝑋 . As the result of choosing the 𝑢∗,𝜙!∗ at the every step of time, feedback control maneuver will be attained through connecting the fragments of optimal maneuver gained by optimal control inputs at the each step of time. Therefore, the attitude maneuver obtained by this method can be considered as a quasi-optimal solution. It should be noted that the solution has possibility of falling into a local optimal solution because this method does not consider the global attitude motion. Concrete deriving process of the control input formalization is described as follows.
Because 𝛼.!, 𝛿
.! is constant as to control inputs: u and 𝜙,
from Eq. (3) and (4), 𝑢∗ 𝑎𝑛𝑑 𝜙∗minimize the value f of the next equation, Eq. (10).
𝑓 ≡𝛼~− 𝛼
~!"#$%!
𝛿~− 𝛿
~!"#$%!
!
𝛼., 𝛿. !
=𝛼~− 𝛼
~!"#$%!
𝛿~− 𝛿
~!"#$%!
!1𝐼!𝛺
𝐴 + 𝑢𝛥𝐴 − 𝐵 + 𝑢𝛥𝐵𝐵 + 𝑢𝛥𝐵 𝐴 + 𝑢𝛥𝐴
𝛼 − 𝛼! + 𝛥𝛼!"𝛿 − 𝛿! + 𝛥𝛿!"
(10)
where [𝛥𝛼!" ,𝛥𝛿!"] is described as Eq. (4).
And as another deformation about f, from Eq. (1),
𝑓 ≡𝛼~− 𝛼
~!"#$%!
𝛿~− 𝛿
~!"#$%!
!
𝛼., 𝛿. !
=𝛼~− 𝛼
~!"#$%!
𝛿~− 𝛿
~!"#$%!
!1𝐼!
1𝛺 cos 𝛿 0
01𝛺
𝑇!𝑇!
(11)
From Eq. (11), f is linear with u because f is linear with T, which is linear with u from the definition of u. Thus, f takes the minimum value at 𝑢 = 0 or 𝑢 = 1 . Because 𝑢 = 0 means the RCD control doesn’t be utilized, let us think about 𝜙∗ minimizing f fixing 𝑢 to 1. When fixing 𝑢 = 1 and considering about 𝜙∗
minimizing f, !"!"= 0 is the necessary condition.
Therefore, from Eq. (10), 𝜙∗ minimizing f is written as follows:
𝜙 = arctan𝑝𝐿 + 𝑞𝑀𝑝𝑀 − 𝑞𝐿 (12)
where 𝑝, 𝑞 , [𝐿,𝑀] is described as follows:
𝑝𝑞
!=
𝛼~− 𝛼
~!"#$%!
𝛿~− 𝛿
~!"#$%!
!𝐴 + 𝛥𝐴 − 𝐵 + 𝛥𝐵𝐵 + 𝛥𝐵 𝐴 + 𝛥𝐴
𝐿𝑀 = 𝐴 + 𝛥𝐴 − 𝐵 + 𝛥𝐵
𝐵 + 𝛥𝐵 𝐴 + 𝛥𝐴
!! 𝐻!𝐻!
(13)
As mentioned above, because 𝑢∗ is u = 0 or u = 1, it is
needed to compare the value of !"!"
when u = 0and u = 1.
After comparing, the couple of 𝜙 𝑎𝑛𝑑 𝑢 which makes the
value of !"!"
smaller is the required control input at that time.
As continuing choosing the control inputs along by the time transient, the intended attitude maneuver by LFCM is realized. 4. Simulation results This chapter indicates the results of simulation of attitude maneuver conducted by three methods, which are the method of changing the convergent point, LFCM, and DCNLP. These maneuvers shown in this chapter are all from the initial angle: [𝛼 − 𝛼!, 𝛿 − 𝛿!] = [-3, 5] to the final angle: [2, -4]. As an explanation for the graphs in this chapter, Fig. 5, 6, 8 show attitude maneuvers of a spacecraft, and each X-axis

5
shows the angle of 𝛼 − 𝛼! [𝑑𝑒𝑔], Y-axis shows that of 𝛿 − 𝛿! [𝑑𝑒𝑔]. Fig. 7, 9 show histories of control inputs, and
each X-axis shows Time[day], Y-axis shows the values of control inputs. The parameters of this paper’s simulation are determined by the condition of IKAROS flight data [8][9]. Table 1 shows the parameters used in the simulation of this paper. Moreover, in order to discuss simply, [𝛼!, 𝛿!] = [0,0] is assumed. The assumption is reasonable when discussing about deep-space exploration because the change rate of sunward direction in inertial frame can be regarded as sufficiently small.
Table 1. Parameters for the simulation in this paper
Arm length of RCD [m] 7
Installed height of RCD [m] 0
𝛥𝐶!"# 0.30
𝛥𝐶!"# -0.27
Square of RCD [𝑚!] 12.6
Normal vector of RCD: 𝒏𝟎 0 0 1 !
Spin rate 𝛺 [rpm] 1.2
Inertia momentum of spin axis I! [𝑘𝑔𝑚!] 868
4.1. The method of changing the convergent point In the method of changing the convergent point, which calls as the conventional method after, the values of control variable to attain the intended maneuver can be obtained from Eq. (3) and (4). And in this method, the values of control variable are constant during the maneuver. In this case, the values of control variable are calculated as 𝑢,𝜙!,𝜙! = [0.7, 0.898,𝜋]. Using this control variable, the
attitude maneuver becomes as indicated in Fig. 5. It takes about 138[days] to finish the intended attitude maneuver.
Figure 5. Attitude maneuver trajectory by the conventional method
4.2. Attitude maneuver by LFCM As mentioned above, Eq. (12), (13) indicate the feedback control input: 𝜙∗. The intended attitude maneuver is attained
by continuing choosing the control input at the each time and propagating the attitude motion along the time. The result of attitude maneuver by LFCM is indicated in Fig. 6, and its history of the control input values is indicated in Fig. 7. It should be noted that ϕ! is fixed at 𝜋. It takes about 18.4[days] to finish the intended attitude maneuver. As shown in Fig. 7, the value of 𝜙! is not constant.
Figure 6. Attitude maneuver trajectory by LFCM
Figure 7. Control inputs history by LFCM
4.3. Optimal attitude maneuver by DCNLP DCNLP is the numerical direct optimization method known as the method comparatively likely to converge to the global optimal solution [10]. To compare with the maneuver by LFCM, the numerical optimal solution of the intended attitude maneuver obtained by DCNLP is shown in this section. The result of the attitude maneuver by DCNLP is described in Fig. 8, and its history of control input values is indicated in Fig. 9. It should be noted that ϕ! is fixed at 𝜋. It takes about 13.9[days] to finish the intended attitude maneuver.

6
Figure 8. Attitude maneuver trajectory by DCNLP
Figure 9. Control inputs history by DCNLP
4.4. Comparison of the necessity times for maneuvers This section indicates results of various attitude maneuvers conducted by each method.
Table 2. Results of various attitude maneuvers Intended Maneuver [deg] The Time required for Maneuver [day]
𝛼 − 𝛼! , 𝛿 − 𝛿! !"!# → 𝛼 − 𝛼! , 𝛿 − 𝛿! !"#$%!
Conventional Method
LFCM DCNLP
[-3,5] → [2,-4] 138 18.4 13.9 [2,6] → [-4,-4] 141 26.3 14.0 [-3,-4] → [4,2] 136 16.75 11.9 [4,-2] → [2,5] 129 19.2 8.4 [5,-4] → [-2,4] 139 17.15 14.3
5. Conclusions
This study proposes LFCM, which intends a fast and direct attitude control method of a spinning solar sail with RCD control. LFCM utilizes the character of Lyapunov Function, and succeeds in reducing the time required to perform an attitude maneuver about one order of magnitude compared with the conventional method.
Comparing the attitude maneuver by LFCM and the optimal attitude maneuver by DCNLP, it is figured out that the attitude maneuver by LFCM is not the global optimal solution but a quasi-optimal attitude maneuver. As it is clear from Eq. (12) and (13), LFCM succeeds in describing the values of control input quite simply. The fact indicates that the feedback control input required for attaining the intended maneuver could be obtained easily only if the parameters used in Eq. (12) and (13) were determined. Although this study deals with the parameters describing the sail deformation and the characteristic of RCD as deterministic values, they are basically stochastic parameters because of the difficulty of their estimation. The accuracy of estimation of these parameters is greatly important for realizing the intended attitude maneuvers. As mentioned in section 2.3, the model of attitude motion of a spinning solar sail with RCD puts the assumption that the spin rate of the sail is constant. In order to implement the perfectly propellant-free attitude control of solar sail, it is necessary to obtain the method that simultaneously controls the attitude and the spin rate of the spinning solar sail with RCD.
References
1) McInnes, C. R. Solar sailing: technology, dynamics and mission applications. 1999. Chichester, UK: Praxxis.
2) Funase, R., Shirasawa, Y., Mimasu, Y., Mori, O., Tsuda, Y., Saiki, T., Kawaguchi, J. On-orbit verification of fuel-free attitude control system for spinning solar sail utilizing solar radiation pressure. Advances in Space Research, 48(11):1740–1746, December 2011.
3) Tsuda, Y., Saiki, T.,Funase, R., Mimasu, Y. Generalized Attitude Model for Spinning Solar Sail Spacecraft. Journal of Guidance, Control, and Dynamics, 36(4):967–974, July 2013.
4)
Furumoto, T., Funase, R. Attitude Control Model for Spinning Solar Sail Spacecraft with Reflectivity Control Capability. 91130, International Symposium on Space Technology and Science, July, 2015
5) Wie, B. Dynamic modeling and attitude control of solar sail spacecraft. Part I. AIAA Paper, 4572, 5-8, 2002
6) Rios-Reyes, L., Scheeres, D. J. Generalized model for solar sails. Journal of Spacecraft and Rockets, 42(1), 182-185, 2005
7) Cho, D. H., Chung, Y., Bang, H. Trajectory correction maneuver design using an improved B-plane targeting method. Acta Astronautica, 72, 47-61, 2012
8) Yuichi, T., et al. "Shape parameters estimation of IKAROS solar sail using in-flight attitude determination data." Proceedings of 52nd AIAA/ASME/ASCE/AHS/ASC structures, structural dynamics and materials conference. 2011.
9) Funase, R., Kanno, G., Tsuda, Y. Controllability of Propellant-free Attitude Control System for Spinning Solar Sail Using Thin-film Reflectivity Control Devices Considering Arbitrary Sail Deformation. 63rd International Astronautical Congress. 2012
10) Hargraves, C. R., Paris, S. W. Direct trajectory optimization using nonlinear programming and collocation. Journal of Guidance, Control, and Dynamics, 10(4), 338-342, 1987