Time, Clocks, - UNB · four atomic clocks, one of which is selected by the spacecraft controllers...
5
IN NO VA TION "Innovation" is a regular co lumn in GPS World featuri ng discussions on recent advances in CPS rec/mology and irs app licatiom as well as on th e f undamentals of GPS posir ioning . In this i ssue 1 ve present a Tutorial 011 one of th e underl yi ng principles of GP S: the precise measure ment of time. This column is coordinared by Richard La ngley and Alfred Kleusberg of th e Deparrmenr of Sur veving Engineering at the Universi(\· of New Brun s wick. We welcome your commen ts and suggestions of topics for fi. aure columns. Time is of the es sen ce. Thi s tatement. us ed primaril y to characteri ze th e clauses in cer- tain l egal documents. al so ni ce ly de scribes the n at ure of th e Gl oba l Posit i on ing System. The basic m eas urement a GPS receiver make s is of th e ti me requi red for a ignal to propagate from a part i cu lar s ate lli te to the re- ceive r. Mult iplyin g thi s time interva l by the speed at whi ch th e sig nal prop agates - the sp eed of li ght - converts it into a ran ge or di s tance. Suc h a one-way rangin g technique require s acc urate timek eep in g in both the sat- ellite and the rece iver. In th is arti cle. we' ll inve stigate how thi s acc uracy is achieved and examine so me of th e intri cacies of time th at are importa nt in GPS positionin g. The hi gh posit i on ing acc uracy of GPS is due. in part. to the use of atomic clocks co co ntrol th e ge nerat ion of th e signa ls tra nsmitted by the satellites. For r ed und an cy, each Navstar GPS Block II satell ite contains four atom ic cl ocks, one of whi ch is se lect ed by the spacecraft controll ers to prov id e the freq u ency and timi ng requi rement s for ge n- 38 GPS WORLD No< embe r/ December 1991 Time, Clocks, and GPS Richard B. Langley University of New Brunswick erating the satellite's signal s. But just what is an at omi c clock? Bef ore we answer thi s questi on, l et" s examin e so me of th e bas ic conce pts assoc iat ed with clocks and timekeeping. THE QUARTZ CRYSTAL RESONATOR All clocks co nt ai n an oscillator, whi ch in turn contains a freque n cy-determining ele- ment called a resonator. A reso nator is any dev i ce th at vibrates or osc illates with a we ll- defin ed frequency when excited. such as gui- tar and viol in strings, pend ulums. and quartz crystal s. Once excited , the osc ill at i ons of a r eso nator slowly die out due to ener gy lo ss . A perfect reso nator has no ener gy l oss and wi ll os ci ll ate forever. To be u se fu l in an osc ill ator , a reso nator mu st be sti mul at ed or energi zed repeat ed ly. Thi s process is accompli sh ed in a quartz crys- tal osciJlator by taking advan tage of the piezo- electric effect: An extern al voltage appli ed across oppos ite fac es of a pi ece of quartz crys- tal cut in a presc ribed way causes the cry s tal to expand or co ntract depen di ng on th e po- larity of the vo ltage. The in verse is also true: forcibly de formin g the crystal cau ses a small el ectri cal potenti al to develop. A crys tal co n- n ec t ed to an altern a ti ng voltage s ource wi ll vi- brate. The v ibrat i ons. in turn. will generate an altern at ing vo ltage. These generated si g- nals interact with th e app lied vo ltage in such a way that the vibrations and the r esultant cur- rent fl ow are at a maximum at a particular fre- quency - the r eso nant freque n cy of the crys- tal. which is dete rmined by th e si ze of the crysta l and how it is cut. Frequenc ies range from 10 kHz to we ll into th e VHF range. Acc uracy (h ow well the os ci ll ator can be tun ed to a sp ec ified fr eq uency ) and stability (h ow well it st ays on freq uen cy) determine th e quality of an osc illator. Th e osc illator's stability is m easu r ed in terms of the re lati ve chan ge in its frequen cy ove r a certain period of tim e. A high- qu alit y quart z cr ys tal osc il - lator kept at a consta nt temperature by a min- iature oven has short-term stability (over pe- ri ods sh orter th an about an hour) of a part in 10 1 2 or better. But over th e l ong tern1 , its fr e- quen cy can drift by several pa rts in 10 11 per day. In order to k eep t wo clocks usi ng quartz crystal osc illators sync hr oni zed to l micros ec- ond . you wou ld have to r eset th em at l eas t every f ew hours. Th e resonators us ed in ato mi c cloc ks h ave surpassed considerab ly th e accuracy a nd sta- bility of quartz resonators. ATOMIC RESONATORS An atomic cl ock conta ins an osc ill ator whose oscillati ons are gove rn ed by a particular atomi c process. Accor ding to the quantum pic- ture of matter. atoms and mol ec ules exist in we ll -defined energy state s. An atom that fa ll s from a hig her to a l ower energy state emits r ad iation in the form of li ght or radi o waves wi th a frequen cy that is directly pro- portion al to the change in energy of the atom. Conversel y. an at om that j umps from a l ower energy state to a hi gher one abso rbs radiat ion of exactly th e sa me frequenc y. The existen ce of such quan tum jumps mean s th at atoms ca n be used as re so nators to govern cl ocks preci se l y. given a way to t ap their reso- nance. Sc ie nt ists found such a way in the late 1 940s , using th e ammonia mol ec ul e as a resonator. However. alth ough th e ammoni a mol ec ul e was a very good re so nator co m- pared to what had been prev i ously u sed in cl ocks, cert ain probl ems resulted in the r eso- nant frequency be in g s omewhat unstable. So sc ient ists turn ed to the ces ium atom and by the mid- 1950s had built th e first ces iu m clocks. The ce sium atom, in it s naturall y occu r- ri ng form. Cs 1 33. co nsists of a nu cleus co nt aining 55 pr otons and 78 neutron s sur- rounded by a swarm of el ec trons. The outer- most el ec tron is in a shell of it s own. Both the nucleus and thi s outer electron spi n on their ax es and, bein g charged. ge nerat e mag - netic dipol es. ln other words. th ey ac t like ti ny bar m agnets. The el ectron ·s magneti c di- pol e is eith er parallel to th e nucleus's dipo le (both north pol es poin t in g in the same direc - ti on ) or antip ara ll el. The se two orientation s co rr espond to two ener gy states of the atom. and tran siti ons between these states form the b as is of th e ces ium cl ock . A bl oc k diagr am of a ces iu m cl ock is sh own in Fi g ur e I. Ce siu m. a soft. sil very metal . is heated in an oven to a co upl e of hun - dr ed degree s Celsiu s. Ind ivi dua l atoms boi l off and pass through a magneti c state sel ec- tor, which defl ects atoms in the higher en- ergy state. allowing onl y atoms in the lower energy s tate to enter a mi crowave resonance cavi ty. Whi le in thi s cavi ty, which operates on th e sa me p rin ciple as the home mi cro -
Transcript of Time, Clocks, - UNB · four atomic clocks, one of which is selected by the spacecraft controllers...
IN NO VA TION
"Innovation" is a regular column in GPS World featuring discussions on recent advances in CPS rec/mology and irs appl icatiom as well as on the fundamentals of GPS posirioning. In this issue 1ve present a Tutorial 011 one of the underlying principles of GPS: the precise measurement of time.
This column is coordinared by Richard Langley and Alfred Kleusberg of the Deparrmenr of Surveving Engineering at the Universi(\· of New Brunswick. We welcome your comments and suggestions of topics for fi.aure columns.
Time is of the essence. This tatement. used primarily to characterize the clauses in certain legal documents. also nicely describes the nature of the Global Posit ioning System. The basic measurement a GPS receiver makes is of the time required for a ignal to propagate from a particular satellite to the receiver. Multiplying this time interval by the speed at which the signal propagates - the speed of light - converts it into a range or distance. Such a one-way ranging technique requires accurate timekeeping in both the satellite and the receiver. In this article. we' ll investigate how this accuracy is achieved and examine some of the intricacies of time that are important in GPS positioning.
The high posit ioning accuracy of GPS is due. in part. to the use of atomic clocks co control the generation of the signals transmitted by the satellites. For redundancy, each Navstar GPS Block II satell ite contains four atomic clocks, one of which is selected by the spacecraft controllers to provide the frequency and timing requirements for gen-
38 GPS WORLD No<ember/December 1991
Time, Clocks, and GPS Richard B. Langley
University of New Brunswick
erating the satellite's signals. But just what is an atomic clock? Before we answer thi s question, let"s examine some of the basic concepts associated with clocks and timekeeping.
THE QUARTZ CRYSTAL RESONATOR All clocks contain an oscillator, which in turn contains a frequency-determining element called a resonator. A resonator is any device that vibrates or oscillates with a welldefined frequency when excited. such as guitar and viol in strings, pendulums. and quartz crystals. Once excited, the oscillations of a resonator slowly die out due to energy loss. A perfect resonator has no energy loss and wi ll osci llate forever.
To be usefu l in an oscillator, a resonator must be stimulated or energized repeatedly. This process is accomplished in a quartz crystal osciJlator by taking advantage of the piezoelectric effect: An external voltage applied across opposite faces of a piece of quartz crystal cut in a prescribed way causes the crystal to expand or contract depending on the polarity of the voltage. The inverse is also true: forcibly deforming the crystal causes a small electrical potential to develop. A crystal connected to an alternating voltage source wi ll vibrate. The vibrat ions. in turn. will generate an alternat ing voltage. These generated signals interact with the applied voltage in such a way that the vibrations and the resultant current flow are at a maximum at a particular frequency - the resonant frequency of the crystal. which is determined by the size of the crystal and how it is cut. Frequencies range from 10 kHz to well into the VHF range.
Accuracy (how well the oscillator can be tuned to a specified frequency) and stability (how well it stays on frequency) determine the quality of an oscillator. The oscillator's stability is measured in terms of the relative change in its frequency over a certain period of time. A high-quality quartz crystal oscillator kept at a constant temperature by a miniature oven has short-term stability (over periods shorter than about an hour) of a part in
10 12 or better. But over the long tern1 , its frequency can drift by several parts in 10 11 per day. In order to keep two clocks using quartz crystal oscillators synchronized to l microsecond . you would have to reset them at least every few hours.
The resonators used in atomic clocks have surpassed considerably the accuracy and stability of quartz resonators.
ATOMIC RESONATORS An atomic clock contains an oscillator whose oscillations are governed by a particular atomic process. According to the quantum picture of matter. atoms and molecules exist in well-defined energy states. An atom that fa lls from a higher to a lower energy state emits radiation in the form of light or radio waves with a frequency that is directly proportional to the change in energy of the atom. Conversely. an atom that jumps from a lower energy state to a higher one absorbs radiat ion of exactly the same frequency. The existence of such quantum jumps means that atoms can be used as resonators to govern clocks precisely. given a way to tap their resonance. Scient ists found such a way in the late 1940s, using the ammonia molecule as a resonator. However. although the ammonia molecule was a very good resonator compared to what had been previously used in clocks, certain problems resulted in the resonant frequency being somewhat unstable. So scientists turned to the cesium atom and by the mid- 1950s had built the first cesium clocks.
The cesium atom, in its naturally occurring form. Cs 133. consists of a nucleus containing 55 protons and 78 neutrons surrounded by a swarm of electrons. The outermost electron is in a shell of its own. Both the nucleus and this outer electron spin on their axes and, being charged. generate magnetic dipoles. ln other words. they act like tiny bar magnets. The electron ·s magnetic dipole is either parallel to the nucleus's dipole (both north poles pointing in the same direction) or antiparallel. These two orientations correspond to two energy states of the atom. and transitions between these states form the basis of the cesium clock .
A block diagram of a cesium clock is shown in Figure I . Cesium. a soft. silvery metal . is heated in an oven to a couple of hundred degrees Celsius. Individual atoms boi l off and pass through a magnetic state selector, which deflects atoms in the higher energy state. allowing only atoms in the lower energy state to enter a microwave resonance cavity. Whi le in this cavi ty, which operates on the same principle as the home micro-
Correction
Note
In the original printed article, the speed of light was given incorrectly due to a typographical error. It has been corrected in this scanned reproduction.

Feedback
Detector
-Cesium
oven Resonance cavity
Magnetic state selector
Magnetic state selector
Figure 1. Basic operation of a cesium atomic clock
wave oven. the cesium atoms are subjected to a radio signal synthesized from the output of a quartz crystal oscillator. The frequency of this signal is very close to that of the energy difference between the two states of the cesium atom described above. A certain number of atoms absorb this radiation and change their state.
When the atoms leave the cavi ty, they again go through a magnetic gate. which directs atoms in the higher energy state toward a detector. The detector produces an electrical signal whose intensity is related to the number of atoms it intercepts. This signal is fed back to the quartz crystal osci llator and is used to control the oscillator's frequency and. hence. that of the synthesized radio signal. Through this feedback process. the frequency is automatically adjusted to maximize the number of atoms reaching the detector. which means that the radio frequency exactly equals the cesium atom's resonance frequency. The frequency of the oscillator's output signal can be electronically divided down to produce, for example, a one-pulseper-second signal to drive a display that tells the time.
Each GPS Block II satell ite contains two cesium clocks, with typical stabilities of I to 2 parts in 10 13 over a one-day period. These clock stabilities contribute from 2.6 to 5.2 meters to the pseudorange error budget. Over an averaging period of 10 days . the stability of the cesium clocks improves to about 4 parts in 1014, decreasing only slight ly for periods as long as I 00 days or more. Cesium clocks are well known for their excellent long-term stability.
Atomic clocks also have been developed based on two other resonators. The rubidium clock is based on a part icular resonant frequency of rubidium atoms. The atoms. in the
form of a very low pressure gas. are contained in a glass cell situated inside a microwave resonance cavity. A microwave signal whose frequency is tuned by a feedback loop induces transitions. The short-term stability of rubidium clocks is almost as good as that of cesium clocks. In fact. over one-day averaging periods. the rubidium clocks in some of the Block I satellites had stabilities of 1.6 parts in 10 13 or better. However. the frequency of rubidium clocks tends to wander over longer periods. resulting in poorer performance. Each Block II satelli te contains two rubidium clocks in addition to the two cesium clocks.
The third and most stable of the atomic clocks is the hydrogen maser. The word maser is an acronym for microwave amplification by stimulated emission of radiation , and. as the name suggests. its operating principle is simi lar to that of the laser. According to the ru les of quantum mechan ics. an atom in an energy-emitting state wi lL eventually. emit radiation of its own accord. Hydrogen masers magnetically select hydrogen atoms in an energy-emitting state to enter a quartz storage bulb. If enough atoms are present in the bulb. one of them will emit spontaneously a packet of radiation - a photon - at the resonant frequency. A photon that strikes another atom in the energy-emitting state may stimulate that atom to emit radiation at exactly the same frequency and exactly in phase with the incident radiation. This process continues with other atoms, and self-oscillation starts very rapidly in the resonance cavity surrounding the bulb. A detector picks up the resulting microwave signal and uses it to phase lock a crystal oscillator.
Hydrogen masers have been built with stabil ities on the order of a few parts in 10 15 .
However. masers are not as common as ce-
INNOVAT I ON
sium or rubidium clocks because they generally are more costly and less rugged. A maser has been employed in a sub-orbital rocket flight , but one has yet to be flown in a satellite. Plans to modify the Block II satellite qualification model for an Advanced Clock/ Ranging Experiment include a hydrogen maser clock as one of the four clocks in the satel lite.
JUST A SECOND Before 1956. the fundamental unit of time was the mean solar day. which is based on the rotation of the earth on its axis. But it was known for some time that the earth· s rotation speed. and hence the length of the day. was not constant due to the action of ocean tides, atmospheric winds, and even motions in the earth ·score. Although the larger variations could be measured and time scales corrected to account for them. it became necessary to define a new fundamental unit of time. In 1956. the second. defined in terms of the period of the earth· s orbit around the sun. became the new standard. But this standard. known as the ephemeris second. was short-lived.
Because the frequency of the cesium resonator is so stable, the development of the cesium clock made it poss ible to define the second such that it could be accurately realized in a laboratory without resorting to a long series of astronomical observations. In 1967,
Cesium clocks are well known for their excellent longterm stability.
the atomic second formally replaced the ephemeris second as the fundamental unit of time in the International System of Scientific Units. The atomic second was defined as exactly 9. 192.631.770 cycles of the unperturbed microwave transition between the two energy levels of Cesium 133 used in the cesium clock. a number chosen to agree closely with the ephemeris second over the pe-
November/December 1991 GPS WO~lD 39

INNOVATION
riod 1956 to 1965 to avoid discont inuities in a tronomical records.
The time scale based on the atomic second is known as Internat ional Atomic Time or TAl. the French acronym. However. not even an atomic clock keeps perfect time. So. rather than re ly on just one clock to provide atomic time. TAl is computed from an ensemble of atomic clocks throughout the world. An international body called the Bureau International des Poids et Mesures (BIPM) based in Sevres just outside Paris performs this computation. Through a va riety of clock-
Not even an atomic clock keeps pe1ject
comparison techniques. including Loran-C radionavigation signals. television signals. and GPS. the Bureau compares the readings of atomic clocks from more than 50 laboratories around the world. The definitive TAT is determined from those readings.
As an aside. we note that -ince 1983 the meter also is defined in terms of the atomic second. By fixi ng the speed of light at 299.729.458 meters per second. the 17th General Conference on Weights and Measures defined the meter as the distance travelled by light in a vacuum during 1/299.729.458 of a second. or a li ttle over 3 nanoseconds.
UNIVERSAL TIME Al though an imperfect timekeeper. the earth· rot at ion wi lh respect to the sun has governed human affairs since time immemorial. True solar time. the time kept by a sundial. is nonuniform due to the earth 's va rying speed in it orbit and because the earth· s equator i not parallel but inclined to its orbit by about 23.5°. However. a mean time cale can be derived by calculating the vari
ations in true solar time. which can amount to as much as 16 minutes. and removing them from true time. The origin of such a time scale. that is. the instan t when the t ime is zero hour (midnight) or twe lve hours
40 GPS WORlD November/ December 1991
(noon). is arbitrary. In fact. the custom up unti l the late 1800s was for each vi llage, town. or city to define it own local mean time. Noon was when the "mean" sun crossed the local meridian. But with the introduction of standard time zones. everyone in a zone approx imately 15 degrees of longitude wide kept the same time. an integral number of hours different from time at the Greenwich meridian - Greenwich Mean Time (GMT) or Universal Time (UT). as it has come to be called . However. a few exceptions to this rule exist. For example. standard time in the Canadian province of Newfoundland is three and a half hours behind UT.
Although corrected for the nonunifonnity of the sun· s apparent mot ion. mean solar time. and hence UT. is st ill irregular due to variation. in the earth 's pin on it axis. as mentioned earl ier. A slight shifting of the rotat ion axis with respect to the earth's crust. a phenomenon known as polar morion. causes further complicat ion. An observatory's determination of Universal Time from measurements of the passage of stars across its meridian. known as UTO (UT zero). embodies the effects of both polar motion and variations in the earth 's spin. Polar motion's contribut ion to UTO is a function of the observatory's position on the earth. and only if a number of observatories around the world each detennine UTO can the magnitude of polar motion be determined and the UTO measurements corrected. UTO corrected for lhe effect of polar motion is known as UTI . UTI represents the actual orientat ion of the earth in space and is the time needed . for example. by sai lors and others to navigate by the stars.
But UT I is still a nonuniform time scale. In addit ion to irregular short-term and seasonal variations. UTI drifts with respect to atomic time in the long tenn. At present this drift amounts to several mi lliseconds per day. Over the span of a year these mi II iseconds can add up to a fu ll second . Civil timekeeping required a time scale that had the uniformity of atomic time but was not too different from UTI . Such a time scale. called Coordinated Universal Time or UTC. was introduced in 196 1. Originally UTC was kept close to UTI by periodically adjusting its rate and by adding or subtract ing step of a fraction of a second. However. since 1972 the UTC rate has been et equal to that of TAl and leap seconds have been introduced into the UTC time cale to prevent UTC from deviating from UT I by more than 0.9 seconds. The last leap second (as of this writing) was inserted into UTC just before midnight on the last day of December 1990.
which then had 86.40 I seconds. The insertion of that leap econd put UTC exactly 26 econds behind TA l. The provision also ex
ists for removing leap seconds from UTC should UTI's rate of change reverse sign. as it did in the last century.
UTI traditionally was deri ved from visual and photographic observat ions of the passage of stars acros an observa tory's meridian. with responsibility for definit ively determining UT I given. by in ternational agreement. to the Bureau International de I'Heure (BIH) at the Pari s Observatory. As the years passed. the BIH refined the reduction process and incorporated ob ervat ions from new techn iques that became available. Eventually. the more accurate space geodetic techniques of very long ba eline interferometry and satellite and lunar laser ranging supplanted conventional techniques. In 1987. the activities of the BIH were reorganized. and the new Internat ional Earth Rotation Service (IERS). whose Central Bureau remained at the Paris Observatory. took over responsibility for determining UT I and polar mot ion in 1988 . The IERS works closely wi th the BIPM to determine when UTC leap seconds will occur.
GPS TIME The signals transmitted by GPS satellites are referenced to CPS (System) Time. which until June 1990 wa the time kept by a single atomjc clock at one of the monitor stations. However. GPS Time now deri ves from a composite or "paper" clock consisting of all operational monitor station and satellite clocks.
GPS Time i steered over the long run to keep it wi thin about I microsecond of UTC. ignoring leap seconds. So unlike UTC. GPS Time has no leap second jumps. At the integer second level, GPS Time equalled UTC in 1980. but present ly. due to the leap seconds that have been inserted into UTC. it is ahead of UTC by 7 seconds plus a fraction of a microsecond that varies day to day.
A particular epoch is ident ified in GPS Time as the number of seconds that have elapsed since the previou Saturday/Sunday midnight. Such a time measure is. of course, ambiguous. so one must also indicate in which week the epoch is. GPS week tart with week 0 on January 6. 1980. and are numbered consecutively. Figure 2 (a screen shot of a Macintosh Computer HyperCard stack) shows the GPS week and seconds of the week corresponding to the UTC epoch of 12:00:00. November l. 1991: the corresponding Jul ian Date (JD). which represents the number of days and fractional days elapsed since noon UT on January I. 47 13 B.c.; and
R.Langley
R.Langley
299,792,458
R.Langley
R.Langley
1/299,792.458

the Modifi ed Julian Date (MID). which equals JD minus 2400000.5. JD and MJD are frequently used by astronomers. navigators. and others for compactly and unambiguously identifying a particular epoch in ti me.
Atomic clocks perform best with a minimum of adj ustments. So to avoid continuous adjustment, the clocks in the GPS satell ites are only approximately synchronized to GPS Time. The GPS Operational Control System and the United States Naval Observatory (USNO) carefully monitor the offsets of the satell ite clocks from GPS Time. which can be a mill isecond or so. They then determine an offset at an init ial epoch . a linear drift term. and. for rubidium clocks. a drift rate of change term for each sate llite clock. These parameters are uploaded to the corresponding satell ite and subsequently included in its navigation message . A GPS receiver uses the satell ite clock data to convert the measured pseudoranges from the satell ite time scale to GPS Time. The satell ite message also includes the offset of GPS Time with respect to UTC.
When a GPS receiver init ially acquires signals. its clock. in general. wi ll have a large unknown offset with respect to GPS Time. This offset. however. will contribute the same timing bias to all pseudorange measurements made at any particular epoch and can be solved for along with the receiver coordinates. Once determined. the bias can be used to synchronize the receiver clock to GPS Time. GPS Time or UTC then can be displayed by the receiver or used to time-tag recorded data or to generate a one-pulse-persecond electrical signal for controll ing other equipment. Figure 3 shows schematically the relationships among the satellite. receiver. and system time scales and pseudorange measurements. The receiver makes a raw measurement of the time interval. d-r. which when multiplied by the speed of light. c, gives the measured pseudorange. p. Correcting this measurement for satelli te clock. dt, and receiver clock. dT. offsets wi th respect to GPS Time gives the true geometric range. p. ignoring propagat ion delays and other potential biases .
Several manufacturers offer GPS receivers specifically designed for use as sources of precise time information. Such receivers generally are operated from fixed sites and, once their locations are accurately determined. provide synchronized time signals even when only one satell ite is in view . These receivers readi ly achieve accuracies to within about I 00 nanoseconds.
The USNO. BfPM, and others have devel-
INNO VA TION
When?
GPS Time : I 12.00 07 Fndcy, November 1, 199 1
GPS Time- UTC : [2] seconds
- ® UTC O GPSTime- GPS Week ~ Year [IQ [ill Hours
GPS Seconds 1475207 1
Month [ill §] Minutes Q Day of t he Year l 3o5 l
Day [I] §] Seconds
(Now) L_ ________________ ~
Julian Date 12448562
Modified Julian Date 14856 1 5
~ ~ ( Clear) ( Set Mac c lock offset) (Do conversion) (L)
Figure 2. Computer screen display illustrating the conversion of an arbitrary UTC epoch to GPS Time
oped sophisticated techniques for using GPS to synchronize clocks to a precision of I 0 nanoseconds or better even when the clocks are on different continents.
RELATIVISTIC EFFECTS The atomic clocks in the GPS satellites have a 10.23-MHz frequency output. This fundamental frequency corresponds to the chipping rate of the pseudorandom noise P-code and, when divided by 10. gives the rate of the CIA-code. Multiplying the fundamental frequency by 154 produces the L I carrier frequency and by 120 produces the L2 carrier frequency . Actually. in order to account for the effects of relativity. the fundamental frequency of the satellite clocks is set at slightly less than 10.23 MHz.
Einstein showed in his Special Theory of Relativity published in 1905 that a clock moving with a constant speed relative to another clock will appear to run more slowly. Accordingly, a clock in a satell ite traveling in a circular orbit around the earth would appear to lose time compared to one on the ground. But II years later in his Genera l Theory of Relativity, Einstein deduced that clocks in different gravitat ional potentials also will appear to run at different rates. Due to the difte rence in gravitational potential. a clock in a satell ite will appear to run faster than one on the ground . The net effect on a satell ite clock is the combinat ion of the two effects. A clock in a GPS satellite in a circular orbit with a nominal radius of 26.560 ki lometers gains 38.4 microseconds per day compared to one on the ground. This time difference cor-
Satellite time
I GPS Time
I I
;
i !Receiver time
l pic i
Figure 3. Relat ionships among GPS Time and satellite and receiver time scales
responds to a relative frequency offset of its oscillator of 4.45 x I0- 10. In order to compensate for this offse t. the fundamental frequency of the sateLlite clocks is reduced by 0.00455 Hz to 10.22999999545 MHz.
Lf GPS satellites were in circular orbits. their signals would requi re no further compensations for relativity to achieve ranging accuracies at the meter level. However, the orbi tal eccentricity of a GPS satelli te can range up to 0.02 . which means that both its speed and the gravi tational potential it experiences change with time. The result is an oscillating time offset that is proportional to eccentricity and varies sinusoidally with the position of the satelli te in its orbit. The magnitude of this effect can range up to 45.8 nanoseconds, which corresponds to a ranging error of 13.7 meters. A GPS receiver must correct its measured pseudoranges for this
November/December 1991 GPS WOIILD 41
INNOVA T ION
400
Vi' 300 '0 c: 0 (,) Q) Ul 0 c: <0 .s Q) (,) c: Q)
200
100
~ 100 i5 E - 2oo f=
300
-<> PAN 3 PAN 14
- 400~---~---+---~---~---4----+---~
7-23-90 7·28-90 8·2·90 8·7·90 8·1 2·90 8-17-90 8·22·90 8·27·90
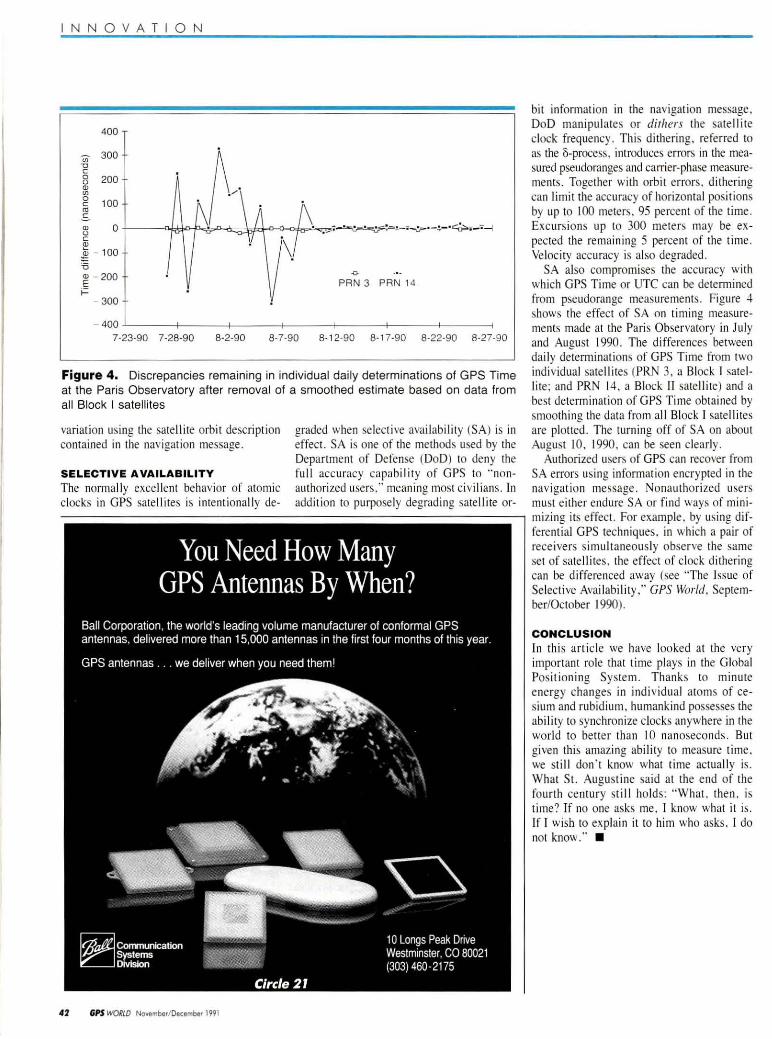
Figure 4. Discrepancies remaining in individual daily determinations of GPS Time at the Paris Observatory after removal of a smoothed estimate based on data from all Block I satellites
variation using the satellite orbit description contained in the navigation message.
SELECTIVE AVAILABILITY The normally excellent behavior of atomic clocks in GPS satell ites is intentionally de-
graded when select ive avai labi lity (SA) is in effect. SA is one of the method used by the Department of Defense (DoD) to deny the fu ll accuracy capabil ity of GPS to ··nonauthorized users." meaning most civilians. In addition to purposely degrading satellite or-
bi t informat ion in the navigat ion message. DoD manipulates or dithers the sate ll ite clock frequency. Thi dithering. referred to as the o-process. introduces errors in the measured pseudoranges and carrier-phase measurements. Together wi th orbit errors. dithering can limit the accuracy of horizontal position by up to 100 meters. 95 percent of the time. Excursion up to 300 meters may be expected the remai ning 5 percent of the ti me. Velocity accuracy is also degraded .
SA also compromises the accuracy with which GPS Time or UTC can be determined from pseudorange measurements. Figure 4 shows the effect of SA on ti ming measurements made at the Paris Observatory in Ju ly and August 1990. The differences between daily determinat ions of GPS Time from two individual satell ites (PRN 3. a Block I satellite; and PRN 14. a Block n satell ite) and a best determination of GPS Time obtained by moothing the data from all Block 1 satell ites
are plotted. The turning off of SA on about August 10, 1990. can be seen clearly.
Authorized users of GPS can recover from SA errors using information encrypted in the navigat ion message. Nonauthorized users must either endure SA or find ways of mini
----------- - ----- - ------------ ----, mizing its effect. For example. by using dif
42 GPS WOFILD November/ December 1991
ferential GPS techniques. in which a pair of receivers simultaneously observe the same set of satell ites. the effect of clock dithering can be differenced away (see ''The Issue of Select ive Avai labi lity ." GPS World. September/October 1990).
CONCLUSION In th is artic le we have looked at the very important role that time plays in the Global Positioning System. Thanks to mi nute energy changes in individual atoms of cesium and rubidium. humankind possesses the ability to synchronize clocks anywhere in the world to better than I 0 nanoseconds. But given this amazing abili ty to measure time. we still don' t know what time actually is. What St. Augustine said at the end of the fourth century st ill holds: "What. then, is time? If no one asks me, I know what it is. If 1 wish to explain it to him who asks. I do not know." •