The Oka-Weil Theorem - DiVA portalumu.diva-portal.org/smash/get/diva2:1137038/FULLTEXT01.pdfin 1936...
55
The Oka-Weil Theorem Jesper Karlsson Spring 2017 Essay, 15hp Bachelor in Mathematics, 180hp Department of Mathematics and Mathematical Statistics
Transcript of The Oka-Weil Theorem - DiVA portalumu.diva-portal.org/smash/get/diva2:1137038/FULLTEXT01.pdfin 1936...

The Oka-Weil TheoremJesper Karlsson
Spring 2017Essay, 15hpBachelor in Mathematics, 180hpDepartment of Mathematics and Mathematical Statistics


AbstractWe give a proof of the Oka-Weil theorem which states that on compact, polynomially
convex subsets of Cn, holomorphic functions can be approximated uniformly byholomorphic polynomials.
SammanfattningVi ger ett bevis av Oka-Weil sats som säger att på kompakta och polynomkonvexa
delmängder av Cn kan holomorfa funktioner approximeras likformigt med holomorfapolynom.


Contents
1. Introduction 12. Preliminaries 32.1. Linear Algebra 32.2. Complex Analysis in One Variable 42.3. Measure Theory 43. Differential Forms 73.1. Multilinear Algebra 73.2. The Tangent and Cotangent space 143.3. Differential Forms 163.4. Integration of Differential Forms 194. Analysis in Several Complex Variables 234.1. The ∂-operator 234.2. Holomorphic Functions on Polydiscs 284.3. A Poincaré Lemma 325. The Oka Extension Theorem 396. The Oka-Weil Theorem 437. Acknowledgements 478. References 49


1. Introduction
Everyone that works in mathematics knows how important it is to be able to reduce aproblem by the means of approximation. In analysis one of the nicest family of functionsare polynomials. Hence, to be able to approximate a function by polynomials is a significantsimplification.
One of the earliest approximation result is due to Karl Weierstrass from 1885 [16]. Itstates that every continuous function defined on a bounded and closed interval in R canbe uniformly approximated by polynomials. Remember that a sequence that converge uni-formly have several important properties, and is stronger than usual pointwise convergence,e.g. exchanging limits with integration and differentiation are possible [12].
In complex analysis, the main object of study is holomorphic functions. Approximation ofholomorphic functions with holomorphic polynomials is an important technique. In the sameyear as Weierstrass published his approximation results, one of his students, Carl Runge,showed that on compact subsets K of the complex plane C, functions that are holomorphicon a neighbourhood of K can be uniformly approximated by rational functions with onepole in each connected component of C\K [5], where C denotes the extended complex plane.An immediate corollary of this is that if C \K only contains one component, then functionsholomorphic on a neighbourhood of K can be uniformly approximated by holomorphicpolynomials. This since polynomials are rational functions with their pole at ∞.
In this essay we shall focus on the generalization of the corollary to Runge’s result toseveral complex variables, known as the Oka-Weil theorem. We shall here present a self-contained proof of the Oka-Weil theorem that states:
Theorem 6.5 (The Oka-Weil Theorem). Let K be a compact, polynomially convex set inCn, n ≥ 1. Then, for every holomorphic function f defined on a neighbourhood of K, thereexists a sequence pi of holomorphic polynomials converging uniformly to f on K.
Theorem 6.5 was first proved by André Weil in 1935 [17]. His proof is based on ageneralization of the Cauchy integral formula on the polydisc, to certain polyhedrons. Then,in 1936 Kiyosha Oka published a paper where he proved what is today known as Oka’sextension theorem [11] (see Theorem 5.5). In that paper Oka also notes that Theorem 6.5is a consequence of his extension theorem.
In this essay, we shall prove the Oka extension theorem, and then the Oka-Weil theoremby applying the Oka extension theorem. The proof we give of Theorem 5.5 and 6.5 followsChapter 7 in [1].
The overview of the essay is as follows. In Section 2, we state some necessary resultsfrom complex analysis in one variable and elementary measure theory. Then, in Section 3,we give a short introduction to the exterior algebra and differential forms. This will beneeded since we shall integrate functions of several complex variables. Section 4 containsan introduction to complex analysis in several variables, and we prove some results neededin the proof of the Oka extension theorem and the Oka-Weil theorem. Finally, in Section 5we prove the Oka extension theorem (Theorem 5.5), and in Section 6 we give a proof ofTheorem 6.5.
1

We shall assume that the reader of this essay has some mathematical maturity, is familiarwith complex analysis in one variable as well as elementary measure theory.
Theorem 6.5(The Oka-Weil Theorem)
Lemma 6.4Corollary 4.16
Corollary 4.15
Theorem 4.14
Theorem 5.5(The Oka Extension Theorem)
Lemma 5.4
Theorem 5.3
Theorem 4.21
Lemma 4.19
Lemma 4.18
Lemma 4.17
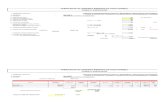
Figure 1.1 – Flowchart of the structure of the essay.
2

2. Preliminaries
This section contains concepts and results which the reader is assumed to already befamiliar with. All results are stated without proof, those that do not know the proof canconsult the indicated references.
We shall by R denote the field of real numbers, and C the complex ones. Then Rn isthe vector space of all n-tuples of real numbers, and Cn is the vector space of all n-tuplesof complex numbers. Usually, Ω will denote an open subset of either Rn or Cn. We willlet Ck(Ω) denote the algebra of all k-times continuously real differentiable complex valuedfunctions defined on Ω. If k = ∞, then we say that the functions are smooth. Similarly,Ck
0 (Ω) denotes the algebra of k-times continuously real differentiable complex valued functi-ons defined on Ω with compact support. When we say that a functions is differentiable weshall always mean that it is real differentiable.
For z ∈ C and r > 0, we define
D1(z, r) = ζ ∈ C : |ζ − z| < r,
i.e. the open disk with radius r centred at z.We shall let S(k) denote the symmetric group of k letters. For π ∈ S(k), sgn(π) denotes
the sign of the permutation π, i.e.
sgn(π) =
1, if π consists of even number of transpositions, and−1, if π consists of odd number of transpositions.
We shall denote the transposition which switches i and j by (i, j).
2.1. Linear Algebra. Let V be an n-dimensional vector space over a field K of characte-ristic 0, e.g. R or C, and let e1, . . . , en be the standard basis for V . Then the determinantis the unique function det : V n → K for which each v1, . . . , vk, v
′k, . . . , vn ∈ V and a ∈ K
fulfils(i) det(v1, . . . , vk + v′
k, . . . , vn) = det(v1, . . . , vk, . . . , vn) + det(v1, . . . , v′k, . . . , vn),
(ii) det(v1, . . . , avk, . . . , vn) = adet(v1, . . . , vk, . . . , vn),
(iii) det(v1, . . . , vk, vk+1, . . . , vn) = 0 if vk = vk+1, and
(iv) det(e1, . . . , en) = 1.
Let vk =(v1
k, . . . , vnk
)∈ V , where vj
k ∈ K. Then it holds that
det(v1, . . . , vn) =∑
π∈S(n)
(−1)sgn(π)vπ(1)1 · · · vπ(n)
n .
For a proof of the above equality and that the above properties do indeed uniquely definethe determinant, see e.g. [2].
A linear functional on a finite dimensional vector space V over a field K is a functionφ : V → K such that it is linear. The dual space of V is the set of all linear functionalson V , and we shall denote it by V ∗. If e1, . . . , en is a basis for V , then there exists linear
3

functionals e∗1, . . . , e
∗n such that
e∗i (ej) =
1, if i = j,
0, if i 6= j,
and e∗1, . . . , e
∗n forms a basis for V ∗. This basis is called the dual basis. A proof can be
found in [2].
2.2. Complex Analysis in One Variable. Let Ω ⊂ C be an open set, and let f : Ω → Cbe a complex valued function. Then f is said to be holomorphic on Ω if the following limit
limζ→0
f(z + ζ) − f(z)ζ
exists for every z ∈ Ω. If we decompose f = u(x, y)+ iv(x, y), where u and v are real valuedfunctions, x = Re(z) and y = Im(z), then f is holomorphic on Ω if, and only if, f ∈ C1(Ω)and satisfies the Cauchy-Riemann equations, i.e.
∂u
∂x= ∂v
∂y,
∂u
∂y= −∂v
∂xon Ω.
This equivalence is known as the Goursat theorem (see e.g. [5]).We shall also need the Cauchy integral formula.
Theorem 2.1 (Cauchy Integral Formula). Let Ω be an open subset of C. Fix z ∈ Ω andr > 0 such that D1(z, r) ⊂ Ω. If f : Ω → C is holomorphic, then
f(ζ) = 12πi
ˆ|z′−z|=r
f(z′)ζ − z′ dz′, for all ζ ∈ D1(z, r).
Proof. See e.g. [5].
2.3. Measure Theory. In this essay we shall only be interested in the Lebesgue measureon subsets of Rn or Cn, therefore all results are stated in terms of the Lebesgue measure,even though the results are more general. We shall denote the Lebesgue measure on Rn
by µn, and since Cn can be identified with R2n the Lebesgue measure on Cn is µ2n. Foran open subset Ω of Rn or Cn we will always assume that we have the Lebesgue measuredefined on the Borel σ-algebra on Ω.
We shall now recall some measure theoretic notions. Let Ω be an open subset of Rn. Asubset of Ω is said to be measurable if it belongs to the Borel σ-algebra on Ω. A complexvalued function f is said to be measurable if for every open subset O of C, f−1(O) ismeasurable. In particular, every continuous function is measurable. A measurable functiondefined on Ω is said to be Lebesgue integrable, or simply integrable, ifˆ
Ω|f |dµn < ∞.
A function f defined on Ω is said to have a property almost everywhere (a.e.) if theset of points where it does not hold have Lebesgue measure zero. Lebesgue’s dominatedconvergence theorem will have a role in this essay, so let us recall it next.
4

Theorem 2.2 (Lebesgue’s Dominated Convergence Theorem). Let g be a non-negative realvalued integrable function defined on an open subset Ω of Rn, let f and f1, f2, . . . be complexvalued measurable functions such that
limn→∞
fn(x) = f(x)
and for n = 1, 2, . . .|fn(x)| ≤ g(x),
holds at almost every x ∈ Ω. Then f and f1, f2, . . . are integrable, and
limn→∞
ˆΩfndµn =
ˆΩfdµn.
Proof. See [13].
The following result is a consequence of Lebesgue’s dominated convergence theorem.
Theorem 2.3. Let I be a connected and open subset of R, Ω an open subset of Rn, andf : Ω × I → C a function such that
(i) for each t ∈ I, the map x 7→ f(x, t) is integrable,
(ii) for almost every x ∈ Ω, the map t 7→ f(x, t) is differentiable with derivative f ′, and
(iii) the map x 7→ supt∈I |f ′(x, t)| is integrable.Then, for each t ∈ I, f ′(·, t) is integrable on Ω and the function F : t 7→
´Ω f(x, t)dµn is
differentiable with derivativeF ′(t) =
ˆΩf ′(x, t)dµn.
Proof. See [7].
5


3. Differential Forms
In this section we give an introduction to differential forms and give the required toolsto be able to state Stokes’ theorem. This section is inspired by Chapter 2 and 3 in [10], andChapter 4 in [1].
3.1. Multilinear Algebra. Let V be an n-dimensional vector space over C. We could hereconsider any field of characteristic 0 instead of C, but since we later are interested in analysisin Cn, we directly stick to the case when the field is C. A k-linear form, or multilinear form,on V is a map
φ : V × · · · × V︸ ︷︷ ︸k−times
→ C
such that φ is linear in each argument. A k-linear map φ is said to be alternating if
φ(v1, . . . , vi, . . . , vj , . . . , vk) = 0
whenever vi = vj for some pair i 6= j.Let
∧k(V ) denote the vector space of all alternating k-linear forms on V . We shall define∧0(V ) to be C, and note that∧1(V ) is V ∗, the dual space of V .
Lemma 3.1. Let φ be k-linear. Then φ is alternating if, and only if,
φ(vπ(1), . . . , vπ(k)
)= sgn(π)φ(v1, . . . , vk)
for every π ∈ S(k).
Proof. Assume that φ is alternating. Since every π ∈ S(k) can be written as a compositionof transposition and sgn : S(k) → −1, 1 is a homomorphism, we can without loss ofgenerality assume that π = (i, j) for some 1 ≤ i < j ≤ k. Let (v1, . . . , vk) ∈ V × · · · × V , fixevery vl such that l 6= i, j, and define
φ′(vi, vj) = φ(v1, . . . , vi, . . . , vj , . . . , vk).
Hence φ′ ∈∧2(V ), and it holds that
0 = φ′(vi + vj , vi + vj) = φ′(vi, vj) + φ′(vj , vi).
So φ′(vj , vi) = −φ′(vi, vj), which shows that
φ(vπ(1), . . . , vπ(k)
)= −φ(v1, . . . , vi, . . . , vj , . . . , vk) = sgn(π)φ(v1, . . . , vi, . . . , vj , . . . , vk).
Now assume thatφ(vπ(1), . . . , vπ(k)
)= sgn(π)φ(v1, . . . , vk)
for every π ∈ S(k). Let vi = vj for some pair i 6= j, and let π = (i, j). Then sgn(π) = −1and
φ(v1, . . . , vi, . . . , vj , . . . , vk) = −φ(v1, . . . , vj , . . . , vi, . . . , vk).But since vi = vj , both sides are equal. Hence, φ(v1, . . . , vi, . . . , vj , . . . , vk) = 0 and φ isalternating.
Next we introduce the wedge product on the space of alternating multilinear forms.
7

Definition 3.2. Let φ ∈∧k(V ), ψ ∈
∧l(V ) where k, l ≥ 0 are integers, and letv1, . . . , vk+l ∈ V.
Then the wedge product of φ and ψ is defined by
(φ ∧ ψ)(v1, . . . , vk+l) = 1k!l!
∑π∈S(k+l)
sgn(π)φ(vπ(1), . . . , vπ(k)
)ψ(vπ(k+1), . . . , vπ(k+l)
).
If either k or l equals 0, then we define φ ∧ ψ to be usual scalar multiplication.
Remark 3.3. The normalization factor 1k!l! is a convention and differs in the literatures, we
follow here that of [10].
We must show that the wedge product is well-defined, i.e. that φ∧ψ is (k+ l)-linear andalternating.
Lemma 3.4. The wedge product maps∧k(V ) ×
∧l(V ) into∧k+l(V ).
Proof. Let φ ∈∧k(V ) and ψ ∈
∧l(V ). Each term of φ ∧ ψ is of the formφ(vπ(1), . . . , vπ(k)
)ψ(vπ(k+1), . . . , vπ(k+l)
)for some π ∈ S(k+ l). Then it follows directly from that φ is k-linear and ψ is l-linear, thatφ ∧ ψ is (k + l)-linear.
Left to show is that φ ∧ ψ is alternating. Let σ ∈ S(k + l), then since sgn(σ)2 = 1, itholds that
(φ ∧ ψ)(vσ(1), . . . , vσ(k+l)
)= 1k!l!
∑π∈S(k+l)
sgn(π)φ(vπ(σ(1)), . . . , vπ(σ(k))
)ψ(vπ(σ(k+1)), . . . , vπ(σ(k+l))
)= sgn(σ)
k!l!∑
π∈S(k+l)
sgn(πσ)φ(vπ(σ(1)), . . . , vπ(σ(k))
)ψ(vπ(σ(k+1)), . . . , vπ(σ(k+l))
).
But σ is bijective, so S(k + l) = πσ : π ∈ S(k + l), and therefore
sgn(σ)k!l!
∑π∈S(k+l)
sgn(πσ)φ(vπ(σ(1)), . . . , vπ(σ(k))
)ψ(vπ(σ(k+1)), . . . , vπ(σ(k+l))
)= sgn(σ)
k!l!∑
π∈S(k+l)
sgn(π)φ(vπ(1), . . . , vπ(k)
)ψ(vπ(k+1), . . . , vπ(k+l)
).
Hence,(φ ∧ ψ)
(vσ(1), . . . , vσ(k)
)= sgn(σ)(φ ∧ ψ)(v1, . . . , vk)
for all σ ∈ S(k + l), and by Lemma 3.1, we have that φ ∧ ψ ∈∧k+l(V ).
The wedge product is linear, and associative, but not commutative, as the next lemmashows.
Lemma 3.5. Let α, β ∈ C, φ, φ′ ∈∧k(V ), ψ,ψ′ ∈
∧l(V ) and θ ∈∧m(V ). Then,
(i) φ ∧ (αψ + βψ′) = αφ ∧ ψ + βφ ∧ ψ′, (αφ+ βφ′) ∧ ψ = αφ ∧ ψ + βφ′ ∧ ψ, and
8

(ii) φ ∧ ψ = (−1)klψ ∧ φ,
(iii) (φ ∧ ψ) ∧ θ = φ ∧ (ψ ∧ θ).
Proof. We first prove (i). Looking at the left-hand side of (i), every term is on the formφ(αψ + βψ′). By the usual rules for products in C every such term equals αφψ + βφψ′.Similarly for
(αφ+ βφ′) ∧ ψ = αφ ∧ ψ + βφ′ ∧ ψ.
Hence, (i) holds.To show (ii) we define τ ∈ S(k + l) to be the permutation
τ(1) = k + 1, τ(2) = k + 2, . . . , τ(l) = k + l,
τ(l + 1) = 1, τ(l + 2) = 2, . . . , τ(l + k) = k.
Using that τ is a bijection of S(k + l) gives that
(ψ ∧ φ)(v1, . . . , vk+l) = 1k!l!
∑π∈S(k+l)
sgn(π)ψ(vπ(1), . . . , vπ(l)
)φ(vπ(l+1), . . . , vπ(l+k)
)= 1k!l!
∑π∈S(k+l)
sgn(πτ)ψ(vπ(τ(1)), . . . , vπ(τ(l))
)φ(vπ(τ(l+1)), . . . , vπ(τ(l+k))
).
Note that τ can be written as
τ =l∏
i=1(i+ k − 1, i+ k) · · · (i+ 1, i+ 2)(i, i+ 1).
Therefore, sgn(τ) = (−1)kl and
(ψ ∧ φ)(v1, . . . , vk+l) = (−1)kl
k!l!∑
π∈S(k+l)
sgn(π)φ(vπ(1), . . . , vπ(k)
)ψ(vπ(k+1), . . . , vπ(k+l)
)= (−1)kl(φ ∧ ψ)(v1, . . . , vk+l).
Finally we show (iii). First, note that S(k+ l) and S(l+m) can be seen as subgroups ofS(k + l +m) by letting
S(k + l) = π ∈ S(k + l +m) : π(k + l + 1) = k + l + 1, . . . , π(k + l +m) = k + l +m,
andS(l +m) = π ∈ S(k + l +m) : π(1) = 1, . . . , π(k) = k.
Hence, explicitly written out, ((φ ∧ ψ) ∧ θ)(v1, . . . , vk+l+m) equals
1(k + l)!m!
∑σ∈S(k+l+m)
sgn(σ)(φ ∧ ψ)(vσ(1), . . . , vσ(k+l)
)θ(vσ(k+l+1), . . . , vσ(k+l+m)
)= 1
(k + l)!k!l!m!∑
σ∈S(k+l+m)
∑π∈S(k+l)
sgn(σ) sgn(π)φ(vσ(π(1)), . . . , vσ(π(k))
)ψ(vσ(π(k+1)), . . . , vσ(π(k+l))
)θ(vσ(k+l+1), . . . , vσ(k+l+m)
).
9

Next, we switch the summations, and use that every π ∈ S(k + l) and τ ∈ S(l + m) is abijection of S(k + l +m), yielding that
1(k + l)!k!l!m!
∑σ∈S(k+l+m)
∑π∈S(k+l)
sgn(σ) sgn(π)φ(vσ(π(1)), . . . , vσ(π(k))
)ψ(vσ(π(k+1)), . . . , vσ(π(k+l))
)θ(vσ(k+l+1), . . . , vσ(k+l+m)
)= 1
(k + l)!k!l!m!∑
π∈S(k+l)
∑σ∈S(k+l+m)
sgn(σπ)φ(vσ(π(1)), . . . , vσ(π(k))
)ψ(vσ(π(k+1)), . . . , vσ(π(k+l))
)θ(vσ(k+l+1), . . . , vσ(k+l+m)
)= 1
(k + l)!k!l!m!∑
π∈S(k+l)
∑σ∈S(k+l+m)
sgn(σ)φ(vσ(1), . . . , vσ(k)
)ψ(vσ(k+1), . . . , vσ(k+l)
)θ(vσ(k+l+1), . . . , vσ(k+l+m)
).
The group S(k + l) contains (k + l)! elements, so the last line can be written as
1k!l!m!
∑σ∈S(k+l+m)
sgn(σ)φ(vσ(1), . . . , vσ(k)
)ψ(vσ(k+1), . . . , vσ(k+l)
)θ(vσ(k+l+1), . . . , vσ(k+l+m)
),
and we have the equality
((φ ∧ ψ) ∧ θ)(v1, . . . , vk+l+m) = 1k!l!m!
∑σ∈S(k+l+m)
sgn(σ)φ(vσ(1), . . . , vσ(k)
)ψ(vσ(k+1), . . . , vσ(k+l)
)θ(vσ(k+l+1), . . . , vσ(k+l+m)
). (3.1)
Following the same step used to show (3.1), and using that S(l + m) contains (l + m)!elements, it holds that
(φ ∧ (ψ ∧ θ))(v1, . . . , vk+l+m) = 1k!l!m!
∑σ∈S(k+l+m)
sgn(σ)φ(vσ(1), . . . , vσ(k)
)ψ(vσ(k+1), . . . , vσ(k+l)
)θ(vσ(k+l+1), . . . , vσ(k+l+m)
). (3.2)
Hence, comparing (3.2) and (3.1), it holds that (φ ∧ ψ) ∧ θ = φ ∧ (ψ ∧ θ).
Remark 3.6. If φ, ψ ∈∧1(V ), then property (ii) implies that φ∧ψ = −ψ ∧φ, and if φ = ψ,
then φ ∧ ψ = 0. Hence, in a product φ1 ∧ · · · ∧ φk, if any two multilinear forms are equal,the product is 0.
For each k, the set∧k(V ) together with addition of k-forms and scalar multiplication
makes it into a vector space over C. Our next goal is to construct a basis for each∧k(V ).
But before that, we need to following lemma.
10

Lemma 3.7. Let φ1, . . . , φk ∈∧1(V ), and v1, . . . , vk ∈ V . Then it holds that
(φ1 ∧ · · · ∧ φk)(v1, . . . , vk) = det
φ1(v1) φ1(v2) · · · φ1(vk)φ2(v1) φ2(v2) · · · φ2(vk)
......
...φk(v1) φk(v2) · · · φk(vk)
.Proof. The proof is by induction on k. If k = 2, then
(φ1 ∧ φ2)(v1, v2) =∑
π∈S(2)
sgn(π)φ1(vπ(1)
)φ2(vπ(2)
)= φ1(v1)φ2(v2) − φ1(v2)φ2(v1) = det
(φ1(v1) φ1(v2)φ2(v1) φ2(v2)
).
Assume now that the claim is true for k = p− 1. Then,
(φ1 ∧ · · · ∧ φp)(v1, . . . , vp)
= 1(p− 1)!
∑π∈S(p)
sgn(π)φ1(vπ(1)
)(φ2 ∧ · · · ∧ φp)
(vπ(2), . . . , vπ(p)
)= 1
(p− 1)!∑
π∈S(p)
sgn(π)φ1(vπ(1)
)(φ2 ∧ · · · ∧ φp)
(vπ(2), . . . , vπ(p)
).
By keeping track of π(1) for each π ∈ S(p), the sum can be split into two sums. One overj = π(1) and one over each permutation of (1, . . . , j, . . . , p). Here the hat denotes that thej:th element is absent. If we let P (j) denote all permutations of
(1, . . . , j, . . . , p
), then
sgn(π) = (−1)j+1 sgn(σ), where σ ∈ P (j), and
(φ1 ∧ · · · ∧ φp)(v1, . . . , vp)
= 1(p− 1)!
p∑j=1
∑σ∈P (j)
(−1)j+1 sgn(σ)φ1(vj)(φ2 ∧ · · · ∧ φp)(vσ(1), . . . , vσ(j), . . . , vσ(p)
).
Using Lemma 3.1, and that P (j) consists of (p− 1)! elements, gives that
(φ1 ∧ · · · ∧ φp)(v1, . . . , vp)
= 1(p− 1)!
p∑j=1
(−1)j+1φ1(vj)∑
σ∈P (j)
sgn(σ)(φ2 ∧ · · · ∧ φp)(vσ(1), . . . , vσ(j), . . . , vσ(p)
)= 1
(p− 1)!
p∑j=1
(−1)j+1φ1(vj)∑
σ∈P (j)
(φ2 ∧ · · · ∧ φp)(v1, . . . , vj , . . . , vp)
=p∑
j=1(−1)j+1φ1(vj)(φ2 ∧ · · · ∧ φp)(v1, . . . , vj , . . . , vp).
11

By the induction hypothesis we have that
(φ2 ∧ · · · ∧ φp)(v1, . . . , vj , . . . , vp) = det
φ2(v1) . . . φ2(vj) . . . φ2(vp)...
...φp(v1) . . . φp(vj) . . . φp(vp)
.So,
p∑j=1
(−1)j+1φ1(vj)(φ2 ∧ · · · ∧ φp)(v1, . . . , vj , . . . , vp)
is the cofactor expansion of
det
φ1(v1) φ1(v2) · · · φ1(vp)φ2(v1) φ2(v2) · · · φ2(vp)
......
...φp(v1) φp(v2) · · · φp(vp)
.Therefore, by induction we have showed that
(φ1 ∧ · · · ∧ φk)(v1, . . . , vk) = det
φ1(v1) φ1(v2) · · · φ1(vk)φ2(v1) φ2(v2) · · · φ2(vk)
......
...φk(v1) φk(v2) · · · φk(vk)
for all k.
We are now in position to construct a basis for∧k(V ).
Lemma 3.8. Let e1, . . . , en be a basis for V and e∗1, . . . , e
∗n the dual basis. Then, for each
k = 0, . . . , n, e∗i1
∧ · · · ∧ e∗ik
: 1 ≤ i1 < · · · < ik ≤ n forms a basis for∧k(V ).
Proof. If k = 0, then∧k(V ) = C and we can interpret e∗
i1∧ · · · ∧ e∗
ikas a complex number.
Thus, the claim clearly holds for 1 ∈ C as the basis vector.Now assume k > 0. Let ω ∈
∧k(V ), and let v1, . . . , vk ∈ V be such that vi =∑n
j=1 vji ej
for i = 1, . . . , k. Then e∗i (vj) = vi
j , and from Lemma 3.7 it holds that
(e∗
i1∧ · · · ∧ e∗
ik
)(v1, . . . , vk) = det
e∗i1
(v1) · · · e∗i1
(vk)...
...e∗
ik(v1) · · · e∗
ik(vk)
=
∑π∈S(k)
sgn(π)viπ(1)1 · · · viπ(k)
k . (3.3)
We now look at how ω acts on v1, . . . , vk,
ω(v1, . . . , vk) =n∑
i1,...,ik=1ω(vi1
1 ei1 , . . . , vik
k eik
)=
n∑i1,...,ik=1
vi11 . . . vik
k ω(ei1 , . . . , eik).
12

It holds that ω(ei1 , . . . , eik) 6= 0 only if each i1, . . . , ik are unique. Therefore, we can split
the last sum into one sum over 1 ≤ i1, . . . , ik ≤ n : i1 < · · · < ik and one sum over everypermutation of i1, . . . , ik. Then, by Lemma 3.1 and (3.3), it holds that
ω(v1, . . . , vk) =∑
i1<···<ik
∑π∈S(k)
viπ(1)1 · · · viπ(k)
k ω(eiπ(1) , . . . , eiπ(k)
)=
∑i1<···<ik
∑π∈S(k)
viπ(1)1 · · · viπ(k)
k sgn(π)ω(ei1 , . . . , eik)
=∑
i1<···<ik
(e∗
i1∧ · · · ∧ e∗
ik
)(v1, . . . , vk)ω(ei1 , . . . , eik
).
Hence,
ω =∑
i1<···<ik
ω(ei1 , . . . , eik)e∗
i1∧ · · · ∧ e∗
ik,
and it holds thatspane∗
i1∧ · · · ∧ e∗
ik: i1 < · · · < ik =
∧k(V ).
Left is to show the linear independence. Assume that for some complex numbers αi1···ik,
where i1 < · · · < ik, it holds that∑i1<···<ik
αi1···ike∗
i1∧ · · · ∧ e∗
ik= 0.
By Lemma 3.7, letting∑
i1<···<ikαi1···ik
e∗i1
∧ · · · ∧ e∗ik
act on (ej1 , . . . , ejk), where 1 ≤ j1 <
· · · < jk ≤ n, yields that
0 =∑
i1<···<ik
αi1···ik
(e∗
i1∧ · · · ∧ e∗
ik
)(ej1 , . . . , ejk
) = αj1···jk.
Thus, αi1···ik= 0, and e∗
i1∧ · · · ∧ e∗
ik: i1 < · · · < ik is linearly independent.
For some fixed k, the number of elements in e∗i1
∧ · · · ∧ e∗ik
: 1 ≤ i1 < · · · < ik ≤ n isthe number of ways one can choose k different from n elements. Hence, from elementarycombinatorics, the number of basis vectors for
∧k(V ) is(
nk
)= n!
k!(n−k)! , i.e.
dim(∧
k(V ))
=(n
k
).
In particular, dim(∧n(V )) = 1, and if k > n, then
∧k(V ) is empty. This can be understoodfrom that if k > n, then it must hold that e∗
ij= e∗
ilfor some pair in e∗
i1∧ · · · ∧ e∗
ik. Hence,
e∗i1
∧ · · · ∧ e∗ik
= 0, whenever k > n.If we set
∧(V ) =
∧0(V ) ⊕∧1(V ) ⊕ · · · ⊕
∧n(V ). Then together with the wedge product,∧(V ) becomes an associative graded algebra over C, and is called the exterior algebra of V
[10].
13

3.2. The Tangent and Cotangent space. Let Ω be an open subset of Rn. Rememberthat Cr(Ω) denotes the set of all r-times continuously differentiable complex-valued functi-ons on Ω. Similarly, Cr
0(Ω) is the subset of Cr(Ω) such that the functions have compactsupport. Even though we here consider Ω as a subset of Rn, we will later be interested incomplex valued differential forms on subsets of Cn. Therefore, for simplicity, we directlyconsider complex valued functions on Ω. We now define the tangent space for an open setΩ ⊂ Rn at a point x ∈ Ω. There are several equivalent definitions to what the tangent spacea point is. We will follow that of [1].
Definition 3.9. Let x ∈ Ω, then the tangent space at x, denoted by TxΩ, is the vectorspace consisting of all linear maps v : C∞(Ω) → C such that
v(f · g) = f(x)v(g) + g(x)v(f), for all f, g ∈ C∞(Ω).
Remark 3.10. This definition implies that the tangent space for Ω at a point x depends onthe whole set Ω but by intuition the tangent space should be a local property. If one is morecareful it is possible to define the tangent space at a point locally, but this technicality isnot important for our purposes, and therefore it suffices with this definition.
The next example shows an example of an element in the tangent space.
Example 3.11. Let x ∈ Ω ⊂ Rn and let ∂∂xj
∣∣∣x
: C∞(Ω) → C, j = 1, . . . , n, be defined by
∂
∂xj
∣∣∣∣x
(f) = ∂f
∂xj(x).
Then, by the properties of derivatives, ∂∂xj
∣∣∣x
is an element of TxΩ.
By the example above, one can think of the elements in the tangent space as derivativeson smooth functions. Actually, it holds that
∂
∂x1
∣∣∣x, . . . , ∂
∂xn
∣∣∣x
forms basis for TxΩ.
Lemma 3.12. Fix x ∈ Ω ⊂ Rn, and let v ∈ TxΩ. Let f be a constant function on Ω. thenv(f) = 0.
Proof. Let α ∈ C be such that f(x) = α and let 1 be the constant function which maps Ωto 1. Then f = α · 1, and by the properties of v we have that
v(f) = v(α · 1) = αv(1) = αv(1 · 1) = αv(1) + αv(1) = 2v(f).
Hence, v(f) = 0.
Lemma 3.13. Let Ω be an open subset of Rn and fix y ∈ Ω. Then,
∂∂x1
∣∣∣y, . . . , ∂
∂xn
∣∣∣y
is
a basis for TyΩ.
Proof. Since Ω is open, we can find an open ball By centred at y such that By ⊂ Ω. Letf ∈ C∞(Ω), and for i = 1, . . . , n define
fi(x) =ˆ 1
0
∂f
∂xi(y + t(x− y))dt, for all x ∈ By.
14

Note that fi(y) = ∂f∂xi
(y) = ∂∂xi
∣∣∣y(f). By using the fundamental theorem of calculus, it
holds thatn∑
i=1fi(x)(xi − yi) =
ˆ 1
0
n∑i=1
∂f
∂xi(y + t(x− y))(xi − yi)dt
=ˆ 1
0
ddt (f(y + t(x− y)))dt = f(x) − f(y).
Let v ∈ TyΩ, and let v act on f . Using Lemma 3.12, it holds that
v(f) = v
(f(y) +
n∑i=1
fi(x)(xi − yi))
=n∑
i=1v(fi(xi − yi))
=n∑
i=1fi(y)v(xi − yi) + (yi − yi)v(fi) =
n∑i=1
v(xi)∂
∂xi
∣∣∣∣y
(f).
Hence,
∂∂x1
∣∣∣y, . . . , ∂
∂xn
∣∣∣y
span TyΩ. To show that
∂
∂x1
∣∣∣y, . . . , ∂
∂xn
∣∣∣y
is linearly inde-
pendent, assume that for some αi ∈ C, i = 1, . . . , n, it holds thatn∑
i=1αi
∂
∂xi
∣∣∣∣y
= 0.
Acting on xj yields that
0 =n∑
i=1αi
∂
∂xi
∣∣∣∣y
(xj) =n∑
i=1αi∂xj
∂xi
∣∣∣∣y
= αj .
Hence, every αj = 0, and
∂∂x1
∣∣∣y, . . . , ∂
∂xn
∣∣∣y
is linearly independent.
Our interest is in the exterior algebra of TxΩ, and therefore also the dual space, since,as noted earlier,
∧1(TxΩ) is precisely the dual space of TxΩ. The dual space is called thecotangent space and we will denote it by T ∗
x Ω. By definition, T ∗x Ω is the vector space of
all linear maps α : TxΩ → C. If we define dxj
∣∣x
: TxΩ → C by dxj
∣∣x(v) = v(xj) for all
v ∈ TxΩ, then we see that for i, j = 1, . . . , n, it holds that
dxj
∣∣∣∣x
(∂
∂xi
∣∣∣∣x
)= ∂xj
∂xi=
1 if i = j,
0 if i 6= j.
Hence dx1∣∣x, . . . , dxn
∣∣x
is the dual basis. From Lemma 3.8 it follows that for each k =0, . . . , n,
dxi1
∣∣∣∣x
∧ · · · ∧ dxik
∣∣∣∣x
: 1 ≤ i1 < · · · < ik ≤ n
is a basis for
∧k(TxΩ).
15

3.3. Differential Forms. We are now in position to define differential forms.
Definition 3.14. Let Ω ⊂ Rn be open. A differential k-form ω on Ω is a map for whicheach x ∈ Ω assigns an element in
∧k(TxΩ).
Note that 0-forms are maps from Ω to∧0(TxΩ) = C. In other words they are complex-
valued functions on Ω. From Section 3.2 we know that
dx1∣∣x, . . . , dxn
∣∣x
is a basis for
T ∗x Ω, and that
dxi1
∣∣∣∣x
∧ · · · ∧ dxik
∣∣∣∣x
: 1 ≤ i1 < · · · < ik ≤ n
forms a basis for
∧k(TxΩ). Since this holds for all x ∈ Ω, it follows that every k-form ω onΩ can be written as
ω =∑
i1<···<ik
Ci1...ikdxi1 ∧ · · · ∧ dxik
,
where each Ci1...ikis a complex valued function on Ω. For each k = 0, . . . , n, we let
∧k(Ω)denote the vector space of all k-forms on Ω with coefficients in C∞(Ω). Sometimes we willinstead be interested in the case when the coefficients are in C1(Ω), but then we will statethis explicitly.
We can extend the wedge product to differential forms in the obvious way. Let ω ∈∧k(Ω)
and η ∈∧l(Ω), then we define
(ω ∧ η)(x) = ω(x) ∧ η(x).
From Lemma 3.4, ω(x) ∧ η(x) ∈∧k+l(TxΩ), and thus (ω ∧ η) ∈
∧k+1(Ω), so this is well-defined. Since the definition is pointwise, all the properties of the wedge product immediatelytransfer to the wedge product for differential forms.
Our next goal is to define a differential operator that acts on differential forms. Letf ∈ C∞(Ω), then we define
df =n∑
i=1
∂f
∂xidxi.
As defined, df is a 1-form on Ω that operates in the following way: if v ∈ TxΩ, then
df(x)v =n∑
i=1
∂f
∂xidxi
∣∣∣∣x
(v).
Hence d is an operator which acts on smooth functions as f 7→ df , and we see that itmaps C∞(Ω) into
∧1(Ω). Next, we extend d such that for each k = 0, . . . , n, d :∧k(Ω) →∧k+1(Ω).
Definition 3.15. Let ω ∈∧k(Ω) such that
ω =∑
i1<···<ik
Ci1...ikdxi1 ∧ · · · ∧ dxik
where Ci1...ik∈ C∞(Ω). Then, dω is defined by
dω =∑
i1<···<ik
dCi1...ik∧ dxi1 ∧ · · · ∧ dxik
,
16

where
dCi1...ik=
n∑j=1
∂Ci1...ik
∂xjdxj .
The d-operator is called the exterior derivative. If n = 3, the exterior derivative is closelyrelated to some familiar operators in vector analysis on R3. This next example shows thisconnection and also how to perform some simple calculation using differential forms.
Example 3.16. In R3 it holds that dim∧1(R3) = dim
∧2(R3) = 3. Hence, as vectorspaces,
∧1(R3) and∧2(R3) are both isomorphic to R3. Vector fields on R3 are functions
R3 → R3. So, since∧1(R3) is isomorphic to R3, 1-forms on R3 can be identified with vector
fields on R3.We let (x, y, z) be the coordinates on R3. Then dx, dy, dz is a basis for
∧1(R3) anddy ∧ dz, dz ∧ dx,dx ∧ dy is a basis for
∧2(R3). By the identification
dx ↔ dy ∧ dz, dy ↔ dz ∧ dx, dz ↔ dx ∧ dy,
we get an isomorphism between∧1(R3) and
∧2(R3).Now for f ∈ C∞(R3), the usual gradient can be identified with the exterior derivative of
f since df , expressed in the basis dx, dy, dz, is the tuple(
∂f∂x ,
∂f∂y ,
∂f∂z
). For a vector field
V (x, y, z) = (Vx(x, y, z), Vy(x, y, z), Vz(x, y, z))
identified as a 1-form, the exterior derivative acting on V yields
dV = d(Vxdx+ Vydy + Vzdz)
=(∂Vx
∂ydy + ∂Vx
∂zdz)
∧ dx+(∂Vy
∂xdx+ ∂Vy
∂zdz)
∧ dy +(∂Vz
∂xdx+ ∂Vz
∂ydy)
∧ dz
=(∂Vz
∂y− ∂Vy
∂z
)dy ∧ dz +
(∂Vx
∂z− ∂Vz
∂x
)dz ∧ dx+
(∂Vy
∂x− ∂Vx
∂y
)dx ∧ dy.
Then we make use of the isomorphism to identify the last line as a 1-form, and then a vectorfield on R3. Thus, we see that we recover the curl.
If V is a vector field on R3, then we can make use of the isomorphism above to identifyit as a 2-form, denote this 2-form by V ∗. Then, by letting the exterior derivative act on V ∗,we get that
dV ∗ = d(Vxdy ∧ dz + Vydz ∧ dx+ Vzdx ∧ dy)
= ∂Vx
∂xdx ∧ dy ∧ dz + ∂Vy
∂ydy ∧ dz ∧ dx+ ∂Vz
∂zdz ∧ dx ∧ dy
=(∂Vx
∂x+ ∂Vy
∂y+ ∂Vz
∂z
)dx ∧ dy ∧ dz.
Identifying∧3(R3) with R3 then gives that the last line can be identified with a 0-form,
and the divergence is recovered.
The next lemma establishes some properties of the exterior derivative.
17

Lemma 3.17. Let Ω ⊂ Rn be open. For each α, β ∈ C, ω, ω′ ∈∧k(Ω) and η ∈
∧l(Ω) itholds that:
(i) d(αω + βω′) = αdω + βdω′,
(ii) d(ω ∧ η) = dω ∧ η + (−1)kω ∧ dη, and
(iii) d2ω = 0.
Proof. Write ω and ω′ as
ω =∑
i1<···<ik
Ci1...ikdxi1 ∧ · · · ∧ dxik
andω′ =
∑i1<···<ik
C ′i1...ik
dxi1 ∧ · · · ∧ dxik.
Then we have that
d(αω + βω′) =∑
i1<···<ik
d(αCi1...ik
+ βC ′i1...ik
)∧ dxi1 ∧ · · · ∧ dxik
=∑
i1<···<ik
(αdCi1...ik
+ βdC ′i1...ik
)∧ dxi1 ∧ · · · ∧ dxik
= αdω + βdω′.
Thus, (i) holds.To show (ii) we first note that if f, g ∈ C∞(Ω), then
d(fg) =n∑
i=1
∂
∂xi(fg)dxi =
n∑i=1
(∂f
∂xig + f
∂g
∂xi
)dxi = gdf + fdg. (3.4)
Letη =
∑j1<···<jl
Dj1...jldxj1 ∧ . . . dxjl
.
From the linearity of the wedge product, it holds that
ω ∧ η =∑
i1<···<ik
∑j1<···<jl
Ci1...ikDj1...jl
dxi1 ∧ · · · ∧ dxik∧ dxj1 ∧ . . . dxjl
.
Then, using (3.4) gives that
d(ω ∧ η) =∑
i1<···<ik
∑j1<···<jl
d(Ci1...ikDj1...jl
) ∧ dxi1 ∧ · · · ∧ dxik∧ dxj1 ∧ . . . dxjl
=∑
i1<···<ik
∑j1<···<jl
(Dj1...jldCi1...ik
+ Ci1...ikdDj1...jl
) ∧ dxi1 ∧ · · · ∧ dxik∧ dxj1 ∧ . . . dxjl
=∑
i1<···<ik
∑j1<···<jl
Dj1...jldCi1...ik
∧ dxi1 ∧ · · · ∧ dxik∧ dxj1 ∧ . . . dxjl
+∑
i1<···<ik
∑j1<···<jl
(−1)kCi1...ikdxi1 ∧ · · · ∧ dxik
∧ dDj1...jl∧ dxj1 ∧ . . . dxjl
= dω ∧ η + (−1)kω ∧ dη.Hence, we have showed (ii).
18

Finally, let f ∈ C∞(Ω), then we compute
d2f = d(
n∑i=1
∂f
∂xidxi
)=
n∑i,j=1
∂2f
∂xj∂xidxj ∧ dxi
=∑
1≤i<j≤n
(∂2f
∂xi∂xj− ∂2f
∂xj∂xi
)dxi ∧ dxj .
Hence, d2f = 0, since for smooth functions the mixed derivatives commute and
d2ω =∑
i1<···<ik
d2Ci1...ik∧ dxi1 ∧ · · · ∧ dxik
= 0.
Thus, we have showed (iii).
Property (ii) is a Leibniz rule for the exterior derivative and property (iii) is a result ofthat for smooth functions the mixed derivatives commute. This next example shows howproperty (iii) relates to some familiar results of vector analysis on R3.Example 3.18. If we look at vector analysis on R3 again, and recall from Example 3.16that
d :∧
0(R3) →∧
1(R3)is the gradient
d :∧
1(R3) →∧
2(R3)is the curl, and
d :∧
2(R3) →∧
3(R3)is the divergence. Then, property (iii) of Lemma 3.17 implies that
curl grad = 0 anddiv curl = 0.
3.4. Integration of Differential Forms. We now turn to integration on Rn with the helpof differential forms. Since the dimension of
∧n(Rn) is 1 and dx1 ∧ · · · ∧ dxn is a basis for∧n(Rn), every n-form ω can be written asω = f(x)dx1 ∧ · · · ∧ dxn
for some function f(x). The n-form dx1 ∧· · ·∧dxn is called the volume form on Rn. Now letΩ be an open subset of Rn, and let ω be an n-form on the form above such that f ∈ C1
0 (Ω).Then we define the integral of ω over Ω as,ˆ
Ωω =ˆ
Ωf(x)dx1 · · · dxn,
where the right-hand side dx1 · · · dxn is to be interpreted as the Lebesgue measure on Rn.Note that this also defines what is called an orientation on Rn since we have defined thatˆ
Ωdx1 ∧ · · · ∧ dxn > 0.
19

Instead of imposing that f is compactly supported we could instead require that Ω is boun-ded and f continuous on Ω. Either way some restriction is required for the integral to bedefined.
Next we look at how a coordinate transformation applies for integration of differentialforms. Let φ : Ω′ → Ω be an invertible smooth function between opens subsets of Rn, andlet δ be the sign of det(Dφ), i.e. the sign of the Jacobian of φ. Thus φ will be our coordinatetransformation. To distinguish Ω′ and Ω, we let (x1, . . . , xn) be the coordinates on Ω and(y1, . . . , yn) the coordinates on Ω′. Let φi(y1, . . . , yn) be the i:th component of φ. If ω is asabove, then the change of variable formula from multivariable calculus yields thatˆ
Ωω =ˆ
Ωf(x)dx1 · · · dxn =
ˆΩ′f(φ(y))|det(Dφ)|dy1 · · · dyn.
Study now dφ1(y) ∧ · · · ∧ dφn(y). It holds that dφi(y) =∑n
j=1∂φi
∂yjdyj . If we let ∂yφi =∑n
j=1∂φi
∂yj
∂∂yj
, then
dyj(∂yφi) =n∑
k=1
∂φi
∂yk
∂yj
∂yk= ∂φi
∂yj
and
dφi(y) =n∑
j=1dyj(∂yφi)dyj .
Therefore,dφ1(y) ∧ · · · ∧ dφn(y) = (dy1 ∧ · · · ∧ dyn)(∂yφ1, . . . , ∂yφn)dy1 ∧ · · · ∧ dyn.
So, by Lemma 3.7, it holds thatdφ1(y) ∧ · · · ∧ dφn(y) = det(Dφ)dy1 ∧ · · · ∧ dyn = δ|det(Dφ)|dy1 ∧ · · · ∧ dyn.
Hence, if ω = f(x)dx1 ∧ · · · ∧ dxn, it holds thatˆΩω =ˆ
Ω′f(φ(y))|det(Dφ)|dy1 ∧ · · · ∧ dyn =
ˆΩ′δf(φ(y))dφ1(y) ∧ · · · ∧ dφn(y). (3.5)
In the next example we show how to work with integration of differential form for aspecific function. The result of the example will later be used in Section 4.
Example 3.19. Let K ⊂ R2 be compact and let dxdy be the Lebesgue measure on R2.Consider the function f = 1/
√x2 + y2 on K. Then, using the theory developed, we will
show that f is integrable on K. This result will be needed later in Section 4. This resultcan be showed just as easily using elementary calculus, but we do it using differential formsto show how it applies.
Let x = r cos θ and y = r sin θ, where 0 < r < ∞ and 0 ≤ θ < 2π, so r =√x2 + y2. Thus
we change coordinates according to the function φ(r, θ) = (r cos θ, r sin θ), this is the familiarpolar coordinates and it is a well known result that det(Dφ) = r. Hence, det(Dφ) > 0, andδ = 1 in this case. Then dx ∧ dy = d(r cos θ) ∧ d(r sin θ), and it holds that
d(r cos θ) = cos θdr − r sin θdθ,and
d(r sin θ) = sin θdr + r cos θdθ.
20

So,
dx ∧ dy = (cos θdr − r sin θdθ) ∧ (sin θdr + r cos θdθ)= r cos2 θdr ∧ dθ − r sin2 θdθ ∧ dr = rdr ∧ dθ.
Thus, by the change of variable formula for differential forms (Equation (3.5)), it holds thatˆK
fdxdy =ˆ
φ−1(K)
1r
dx ∧ dy =ˆ
φ−1(K)
1rrdr ∧ dθ =
ˆφ−1(K)
dr ∧ dθ < ∞.
The last step follows from that K is compact and that φ−1 is continuous. Indeed, since thatimplies that φ−1(K) is compact, and therefore bounded by the Heine-Borel theorem. Hencef is integrable on K.
Remark 3.20. In the example above if 0 ∈ K, then φ is singular on φ−1(K). But φ−1(0) =(r, θ) : r = 0, 0 ≤ θ < 2π, which has two dimensional Lebesgue measure zero. Thus, thisset does not contribute in the integral, and we can in the coordinate transformation directlylet r range from 0 to ∞, which is the common practise.
For an open set Ω ⊂ Rn, ∂Ω will denote the boundary of Ω which is defined by ∂Ω =Ω ∩ Ωc. If the boundary of Ω is smooth, then it can be shown that the tangent space for∂Ω at each point is an (n− 1)-dimensional vector space. The boundary, ∂Ω, is therefore ahypersurface in Rn, meaning that it is an (n− 1)-dimensional manifold embedded in Rn [9].Integration can then be defined on the boundary, but now the integration will be with respectto (n − 1)-forms, and the measure will be the (n − 1)-dimensional Lebesgue measure. Inorder to make this precise, we need an orientation on the boundary, more precisely we needto define how the boundary inherit the orientation of the set Ω. This requires the theory ofsmooth manifolds which is outside the scope of this essay. For a proper introduction on thesubject see e.g. [9] which does this purely with differential forms, or [3] which also introducesmeasures. One of the most important theorems regarding integration of differential formsis Stokes’ theorem. It relates integration of (n− 1)-forms on the boundary to integration onthe whole set. We state it but omit the proof.
Theorem 3.21 (Stokes’ theorem). Let Ω ⊂ Rn be open and bounded with smooth boundary.Let ω be an (n− 1)-form with coefficients in C1(Ω). Thenˆ
∂Ωω =ˆ
Ωdω.
Proof. In [12], Stokes’ theorem is proved for a special class of sets which are called affinek-chains without introducing manifolds. A good reference for the general case is [9] or[15].
21


4. Analysis in Several Complex Variables
4.1. The ∂-operator. In this section we shall consider differential forms defined on subsetsof Cn. We will define the Wirtinger derivatives, and the definition of holomorphic functionsof several complex variables.
A complex number, z ∈ C, can be decomposed as z = x + iy, where x = Re(z) andy = Im(z) are real numbers. Hence, every complex number can be identified with a 2-tupleof real numbers, and C can therefore be identified with R2. In the same way, an element(z1, . . . , zn) in Cn can be decomposed as
(x1 + iy1, . . . , xn + iyn) = (x1, . . . , xn, y1, . . . , yn).Hence, Cn can be identified with R2n. Now let Ω ⊆ Cn be an open set. Then, from thediscussion above and the result from Section 3.2,
dx1
∣∣∣∣z
, . . . , dxn
∣∣∣∣z
, dy1
∣∣∣∣z
, . . . , dyn
∣∣∣∣z
is a basis for
∧1(TzΩ), z ∈ Ω. Fromzj = xj + iyj , zj = xj − iyj , j = 1, . . . , n,
and the linearity of the exterior derivative, it holds that
dxj = 12(dzj + dzj) dyj = 1
2i (dzj − dzj), j = 1, . . . , n.
So, an alternative basis for∧1(TzΩ) isdz1
∣∣∣∣z
, . . . , dzn
∣∣∣∣z
, dz1
∣∣∣∣z
, . . . , dzn
∣∣∣∣z
.
We now introduce the multi-index notation. Let I = (i1, . . . , ik) be a k-tuple of non-negativeintegers, then |I| = k and we define
dzI = dzi1 ∧ · · · ∧ dzik,
so dzI ∈∧k(Ω). Similarly,
dzI = dzi1 ∧ · · · ∧ dzik,
and dzI ∈∧k(Ω). Thus, if dzI ∈
∧k(Ω) and dzJ ∈∧l(Ω)), then dzI ∧ dzJ ∈
∧k+l(Ω).Definition 4.1. Let p, q ≥ 0 be integers, then we define
∧p,q(Ω) to be the vector space ofall differential forms ω ∈
∧p+q(Ω) such that
ω =∑
|I|=p,|J|=q
CIJdzI ∧ dzJ ,
where each CIJ ∈ C∞(Ω). An element in∧p,q(Ω) is said to be a form of type (p, q).
The next example show what the volume form on C is in the basis dz, dz.Example 4.2. On C the volume form is dx ∧ dy. In terms of dz and dz, dx ∧ dy can bewritten as
dx ∧ dy = 12(dz + dz) ∧ 1
2i (dz − dz) = 14i (dz ∧ dz − dz ∧ dz) = 1
2idz ∧ dz.
23

We now turn to the exterior derivative. If Ω is an open subset of Cn, and f ∈ C∞(Ω),then it holds that
df =n∑
j=1
∂f
∂xjdxj + ∂f
∂yjdyj =
n∑j=1
∂f
∂xj
12(dzj + dzj) + ∂f
∂yj
12i (dzj − dzj)
=n∑
j=1
12
(∂f
∂xj− i
∂f
∂yj
)dzj + 1
2
(∂f
∂xj+ i
∂f
∂yj
)dzj .
Therefore, for j = 1, . . . , n, we define the following differential operators on C∞(Ω),
∂
∂zj= 1
2
(∂
∂xj− i
∂
∂yj
),
∂
∂zj= 1
2
(∂
∂xj+ i
∂
∂yj
).
These are the Wirtinger operators introduced by Wilhelm Wirtinger in 1927 [18]. In termsof these new operators, we have that
df =n∑
j=1
∂f
∂zjdzj + ∂f
∂zjdzj .
The two terms in the sum are differential forms of type (1, 0) and (0, 1) respectively. The-refore, we define the operators
∂f =n∑
j=1
∂f
∂zjdzj and ∂f =
n∑j=1
∂f
∂zjdzj .
Hence ∂ : C∞(Ω) →∧1,0(Ω), ∂ : C∞(Ω) →
∧0,1(Ω) and on C∞(Ω), the exterior derivative,d, equals ∂ + ∂.
We shall need Theorem 2.3 for the operators ∂∂z and ∂
∂z . Therefore we prove a corollaryof Theorem 2.3 in terms of these new operators.
Corollary 4.3. Let O be a connected, convex and open subset of C, Ω an open subset ofCn, and f : Ω ×O → C a function such that
(i) for each z ∈ O, the map ζ 7→ f(ζ, z) is integrable,
(ii) for almost every ζ ∈ Ω, the map z 7→ f(ζ, z) is continuously differentiable, and
(iii) the map ζ 7→ supz∈O |f ′(ζ, z)| is integrable.Then, for each z ∈ O, ∂f
∂z and ∂f∂z are integrable on Ω, and the function
F : z 7→ˆ
Ωf(ζ, z)dµ2n
is differentiable with partial derivatives∂F
∂z(z) =
ˆΩ
∂f
∂z(ζ, z)dµ2n,
∂F
∂z(z) =
ˆΩ
∂f
∂z(ζ, z)dµ2n.
24

Proof. Decompose z = x + iy and fix y. Let Iy = x ∈ R : (x, y) ∈ O, which is an openand connected subset of R, since O is open and convex. Then the function fy : Ω × Iy → Cfulfils the hypothesis of Theorem 2.3. Therefore, it holds that the function Fy : x 7→´
Ω fy(ζ, x)dµ2n is differentiable, anddFy
dx (x) =ˆ
Ω
∂fy
∂x(ζ, x)dµ2n.
Similarly, if we fix x and let Ix = y ∈ R : (x, y) ∈ O, then the function fx : Ω × Ix → Cfulfils the hypothesis of Theorem 2.3. Hence, F x : y 7→
´Ω f
x(ζ, y)dµ2n is differentiable, anddF x
dy (y) =ˆ
Ω
∂fx
∂y(ζ, y)dµ2n.
Thus, F : z 7→´
Ω f(ζ, z)dµ2n is differentiable on O, since the fixed points x and y werearbitrary, and
∂F
∂z(z) = 1
2
(∂
∂x− i
∂
∂y
)F (z) =
ˆΩ
12
(∂
∂x− i
∂
∂y
)f(ζ, z)dµ2n =
ˆΩ
∂f
∂z(ζ, z)dµ2n.
Similarly, we get that∂F
∂z(z) = 1
2
(∂
∂x+ i
∂
∂y
)F (z) =
ˆΩ
12
(∂
∂x+ i
∂
∂y
)f(ζ, z)dµ2n =
ˆΩ
∂f
∂z(ζ, z)dµ2n.
As for the exterior derivative we want to extend ∂ and ∂ to all differential forms.
Definition 4.4. Let ω ∈∧p,q(Ω) such that
ω =∑I,J
CIJdzI ∧ dzJ .
Then, the ∂- and ∂-operator are defined by
∂ω =∑I,J
∂CIJ ∧ dzI ∧ dzJ ,
and∂ω =
∑I,J
∂CIJ ∧ dzI ∧ dzJ .
Remark 4.5. If ω is as in Definition 4.4, then
∂ω + ∂ω =∑I,J
(∂CIJ ∧ dzI ∧ dzJ + ∂CIJ ∧ dzI ∧ dzJ
)=∑I,J
(∂CIJ + ∂CIJ
)∧ dzI ∧ dzJ = dω.
Hence, d = ∂ + ∂. Also, if ω ∈∧p,q(Ω), then ∂ω ∈
∧p+1,q(Ω) and ∂ω ∈∧p,q+1(Ω). Thus,
∂ :∧p,q(Ω) →
∧p+1,q(Ω) and ∂ :∧p,q(Ω) →
∧p,q+1(Ω).
The ∂- and ∂-operator are well-defined also for differential forms with coefficients inC1(Ω). This will be used on a few occasions.
25

Lemma 4.6. Let ω ∈∧p,q(Ω), then
∂2ω = 0, ∂2ω = 0 and(∂∂ + ∂∂
)ω = 0.
Proof. It holds that d2ω = 0. Hence,0 = (∂ + ∂)(∂ + ∂)ω = ∂2ω + (∂∂ + ∂∂)ω + ∂2ω. (4.1)
But ∂2ω ∈∧p+2,q(Ω), (∂∂+ ∂∂)ω ∈
∧p+1,q+1(Ω) and ∂2ω ∈∧p,q+2(Ω) are differential form
of different type. So, by Lemma 3.8, these differential forms are linearly independent of eachother. Thus, each term in (4.1) must be zero. Hence
∂2ω = (∂∂ + ∂∂)ω = ∂2ω = 0.
Lemma 4.7. If ω ∈∧k(Ω) and η ∈
∧l(Ω), then
∂(ω ∧ η) = ∂ω ∧ η + (−1)kω ∧ ∂η.
Proof. From Lemma 3.17 it holds that(∂ + ∂)(ω ∧ η) = (∂ + ∂)ω ∧ η + (−1)kω ∧ (∂ + ∂)η.
This can be written as∂(ω ∧ η) − ∂ω ∧ η − (−1)kω ∧ ∂η = −∂(ω ∧ η) + ∂ω ∧ η + (−1)kω ∧ ∂η.
Here the left-hand, and right-hand sides, are differential forms of different types and thereforeeach side must be zero. Hence,
∂(ω ∧ η) = ∂ω ∧ η + (−1)kω ∧ ∂η
as required.
The ∂-operator is especially important in the theory of several complex variables. Thisis due to the following definition.
Definition 4.8. Let Ω ⊆ Cn be open, and let f ∈ C1(Ω). Then f is said to be holomorphicif ∂f = 0 on Ω.
Remark 4.9. Let f ∈ C1(Ω), then ∂f = 0 if, and only if,∂f
∂zj= 0 in Ω, for j = 1, . . . , n.
By definition of ∂∂zj
, we have that
0 = ∂f
∂zj= 1
2
(∂f
∂xj+ i
∂f
∂yj
).
If we decompose f as u + iv, where u and v are real-valued functions on Ω, then this isequivalent to
∂u
∂xj= ∂v
∂yj,
∂v
∂xj= − ∂u
∂yj.
Note that this is the Cauchy-Riemann equations. Since this holds for each j, it follows thatu and v fulfils the Cauchy-Riemann equations in each variable separately. We assumed that
26

f ∈ C1(Ω), so this implies that f is holomorphic in each variable separately. Hence, f isholomorphic on Ω if, and only if, f is holomorphic in each variable separately.
Remark 4.10. Assume that f ∈ C1(Ω) is holomorphic, i.e. ∂f = 0. Write f = u+ iv, whereu and v are real-valued functions. Then ∂f = 0 is equivalent to that
0 = ∂f
∂zj= 1
2
(∂
∂xj+ i
∂
∂yj
)(u+ iv),
for each j = 1, . . . , n. Next we take the complex conjugate, yielding that
0 = 12
(∂
∂xj− i
∂
∂yj
)(u− iv) = ∂f
∂zj
for each j = 1, . . . , n. Hence, ∂f = 0 if ∂f = 0.
The next two lemmas will be needed later for the proof of Proposition 5.3.
Lemma 4.11. Let Ω be an open subset of Cn and W an open subset of Cm. Let u =(u1, . . . , un) : W → Ω such that each uj ∈ C∞(W ). If f ∈ C∞(Ω), then f u ∈ C∞(W ),and
d(f u) =n∑
j=1
∂f
∂zj(u)duj + ∂f
∂zj(u)duj ,
where both sides are 1-forms on W .
Proof. Let f(u) = f u, and let (ζ1, . . . , ζm) be the coordinates on Cm. Using the chainrule we get that
d(f u) =m∑
i=1
∂f(u)∂ζi
dζi + ∂f(u)∂ζi
dζi =m∑
i=1
n∑j=1
∂f
∂zj(u)∂uj
∂ζidζi + ∂f
∂zj(u)∂uj
∂ζi
dζi
=n∑
j=1
[∂f
∂zj(u)
m∑i=1
(∂uj
∂ζidζi
)+ ∂f
∂zj(u)
m∑i=1
(∂uj
∂ζi
dζi
)]=
n∑j=1
∂f
∂zj(u)du+ ∂f
∂zj(u)du.
To make notation easier when we compose differential forms with smooth functions, wemake the following definition.
Definition 4.12. Let Ω, W and u be as in Lemma 4.11, and let ω ∈∧k,l(Ω) be such that
ω =∑I,J
CIJdzI ∧ dzJ .
Then we defineω(u) =
∑I,J
CIJ(u)duI ∧ duJ ∈∧
k,l(W ).
With the previous lemma we can look at how the ∂-operator acts on composition ofdifferential forms and holomorphic functions.
27

Lemma 4.13. Let Ω be an open subset of Cn, and let W be an open subset of Cm. Letω ∈
∧p,q(Ω) be such thatω =
∑I,J
CIJdzI ∧ dzJ ,
and let u = (u1, . . . , un) : W → Ω be such that each uj is holomorphic on W . Then,
∂(ω(u)) = (∂ω)(u).
Proof. By Lemma 4.7 it holds that
∂(ω(u)) =∑I,J
∂(CIJ(u)duI ∧ duJ)
=∑I,J
∂CIJ(u) ∧ duI ∧ duJ + CIJ(u)∂(duI) ∧ duJ + (−1)kCIJ(u)duI ∧ ∂(duJ).
Since each uj is holomorphic, it holds that ∂uj = ∂uj = 0 for each j = 1, . . . , n. Hence, byLemma 4.6, it follows that
∂(duj) = ∂(∂ + ∂
)uj = ∂∂uj = −∂∂uj = 0,
and∂(duj) = ∂
(∂ + ∂
)uj = ∂2uj = 0.
Thus,∂(ω(u)) =
∑I,J
∂CIJ(u) ∧ duI ∧ duJ =(∂ω)(u).
4.2. Holomorphic Functions on Polydiscs. In order to show the Oka-Weil theorem (seeTheorem 6.5) we need some basic results regarding functions of several complex variables.Here we will study holomorphic functions defined on polydiscs. A polydisc is set on the form
D1(w1, r1) × · · · ×D1(wn, rn),
where w1, . . . , wn ∈ Cn, and r1, . . . , rn > 0 are real numbers. The special form of thepolydiscs makes it possible to use results from the theory of one complex variable. Thisallows us to generalize the Cauchy integral formula to several complex variables.
Theorem 4.14 (Cauchy Integral Formula for Polydiscs). Let w ∈ Cn, and r1, . . . , rn >0. Assume that f is continuous on D1(w1, r1) × · · · × D1(wn, rn), and holomorphic onD1(w1, r1) × · · · × D1(wn, rn). Then, for each z ∈ D1(w1, r1) × · · · × D1(wn, rn), it holdsthat
f(z) = 1(2πi)n
ˆ|ζn−wn|=rn
. . .
ˆ|ζ1−w1|=r1
f(ζ1, . . . , ζn)(ζ1 − z1) · · · (ζn − zn)dζ1 · · · dζn.
Proof. By assumption f is holomorphic on D1(w1, r1)×· · ·×D1(wn, rn), so by Remark 4.9,it is holomorphic in each variable in the usual one-variable sense on each D1(wj , rj). Hence,we can apply Theorem 2.1 to each variable separately. Thus, for each
z ∈ D1(w1, r1) × · · · ×D1(wn, rn),
28

it holds that
f(z) = 12πi
ˆ|ζn−zn|=rn
f(z1, . . . , zn−1, ζn)(ζn − zn) dζn
= 1(2πi)2
ˆ|ζn−zn|=rn
ˆ|ζn−1−zn−1|=rn−1
f(z1, . . . , zn−2, ζn−1, ζn)(ζn − zn) dζn−1dζn
= · · · = 1(2πi)n
ˆ|ζn−wn|=rn
. . .
ˆ|ζ1−w1|=r1
f(ζ1, . . . , ζn)(ζ1 − z1) · · · (ζn − zn)dζ1 · · · dζn.
We now introduce a short-hand notation used in [6] for the domain of integration inTheorem 2.1. Let D = D1(w1, r1) ×D1(wn, rn) be a polydisc, then we define ∂0D to be theCartesian product of the boundary of each disk, i.e.
∂0D = ∂D1(w1, r1) × ∂D1(wn, rn).
Note that ∂0D is not the topological boundary of D, ∂D = D ∩ Dc. Using this notation,the Cauchy integral formula can be written more compactly as
f(z) = 1(2πi)n
ˆ∂0D
f(ζ)(ζ1 − z1) · · · (ζn − zn)dζ,
where dζ = dζ1 · · · dζn.As for the one-variable case there are some simple but powerful corollaries that follows
from the Cauchy integral formula. In this section we shall present two of them that we willuse later.
Corollary 4.15. Let Ω ⊆ Cn be an open set, and let f be a holomorphic function definedon Ω. Then f ∈ C∞(Ω), and if D is a polydisc such that D ⊂ Ω, then for each z ∈ D andnon-negative integers α1, . . . , αn, it holds that
∂(α1+···+αn)f
∂zα11 · · · ∂zαn
n(z) = α1! · · ·αn!
(2πi)n
ˆ∂0D
f(ζ)(ζ1 − z1)α1+1 · · · (ζn − zn)αn+1 dζ.
Proof. Let w ∈ Ω, and let D = D1(w1, r1) × · · · × D1(wn, rn) for some r1, . . . , rn > 0 suchthat D ⊂ Ω. Fix an integer j such that 1 ≤ j ≤ n, and for ζ ∈ ∂0D fix each ζi such thati 6= j. Let
g(ζ) = f(ζ)(ζ1 − z1) · · · (ζj−1 − zj−1)(ζj+1 − zj+1) · · · (ζn − zn) ,
and g(ζj) = g(ζ) with each ζi, i 6= j, fixed. Then, since f is continuous on Ω, it holds that gis continuous on the compact set ∂D1(wj , rj) for each z ∈ D. Hence, g obtains a maximumon ∂D1(wj , rj). Set
M = maxζj∈∂D1(wj ,rj)
|g(ζj)|,
29

then
limh→0
sup∣∣∣∣∣ 1h
(g(ζj)
ζj − (zj + h) − g(ζj)ζj − zj
)− g(ζj)
(ζj − zj)2
∣∣∣∣∣ : ζj ∈ ∂D1(wj , rj)
≤ limh→0
supM
∣∣∣∣∣ 1h(
1ζj − (zj + h) − 1
ζj − zj
)− 1
(ζj − zj)2
∣∣∣∣∣ : ζj ∈ ∂D1(wj , rj). (4.2)
From straightforward algebra, it holds that
M
∣∣∣∣∣ 1h(
1ζj − (zj + h) − 1
ζj − zj
)− 1
(ζj − zj)2
∣∣∣∣∣ = M
∣∣∣∣∣ h
(ζj − (zj + h))(ζj − zj)2
∣∣∣∣∣,so the last line in (4.2) equals
limh→0
supM
∣∣∣∣∣ h
(ζj − (zj + h))(ζj − zj)2
∣∣∣∣∣ : ζj ∈ ∂D1(wj , rj).
Thus,
limh→0
sup∣∣∣∣∣ 1h
(g(ζj)
ζj − (zj + h) − g(ζj)ζj − zj
)− g(ζj)
(ζj − zj)2
∣∣∣∣∣ : ζj ∈ ∂D1(wj , rj)
≤ limh→0
supM
∣∣∣∣∣ h
(ζj − (zj + h))(ζj − zj)2
∣∣∣∣∣ : ζj ∈ ∂D1(wj , rj).
Next, for each ζj ∈ ∂D1(wj , rj) and u ∈ D1(wj , rj), it holds thatrj = |ζj − wj | ≤ |ζj − u| + |u− wj |,
and|ζj − u| ≥ rj − |u− wj |.
Hence, if |h| is small enough such that |wj − (zj + h)| < rj , then
supM
∣∣∣∣∣ h
(ζj − (zj + h))(ζj − zj)2
∣∣∣∣∣ : ζj ∈ ∂D1(wj , rj)
≤ M |h|(rj − |wj − (zj + h)|)(rj − |wj − zj |)2 ,
and
limh→0
sup∣∣∣∣∣ 1h
(g(ζj)
ζj − (zj + h) − g(ζj)ζj − zj
)− g(ζj)
(ζj − zj)2
∣∣∣∣∣ : ζj ∈ ∂D1(wj , rj)
≤ limh→0
M |h|(rj − |wj − (zj + h)|)(rj − |wj − zj |)2 = 0.
Thus, we have showed that1h
(g(ζj)
ζj − (zj + h) − g(ζj)ζj − zj
)→ g(ζj)
(ζj − zj)2
30

uniformly on ∂D1(wj , rj) as h → 0+. Since each ζi, i 6= j, was fixed but arbitrary, the limitalso converges uniformly on ∂0D, as h → 0+. Then, using Theorem 4.14 to express f as anintegral, we have that
∂f
∂zj(z) = lim
h→0
f(z1, . . . , zj + h, · · · , zn) − f(z1, . . . , zn)h
= limh→0
1(2πi)n
ˆ∂0D
1h
(g(ζ)
ζj − (zj + h) − g(ζ)ζj − zj
)dζ.
Using that the convergence is uniformly on ∂0D, we can switch the order of the integrationand the limit. So
∂f
∂zj(z) = 1
(2πi)n
ˆ∂0D
limh→0
1h
(g(ζ)
ζj − (zj + h) − g(ζ)ζj − zj
)dζ
= 1(2πi)n
ˆ∂0D
f(ζ)(ζ1 − z1) · · · (ζj − zj)2 · · · (ζn − zn)
dζ.
This shows that f ∈ C1(D), which was already known from the assumption that f isholomorphic on Ω. But since f(ζ)
(ζ1−z1)···(ζj−zj)2···(ζn−zn) is again continuous on ∂0D, the sameargument as above then yields that
∂2f
∂zi∂zj(z) = 1
(2πi)n
ˆ∂0D
f(ζ)(ζ1 − z1) · · · (ζj − zj)2 · · · (ζi − zi)2 · · · (ζn − zn)
dζ.
Hence, the second derivatives of f exists and are continuous on D. Thus, we can conti-nue differentiate an arbitrary number of times, and in general it holds, for some integersα1, . . . , αn ≥ 0, that
∂(α1+···+αn)f
∂zα11 · · · ∂zαn
n(z) = α1! · · ·αn!
(2πi)n
ˆ∂0D
f(ζ)(ζ1 − z1)α1+1 · · · (ζn − zn)αn+1 dζ.
This shows that f ∈ C∞(D), but remember that D was a polydisc centred at the point wwhich was arbitrarly chosen, so this also implies that f ∈ C∞(Ω).
We now introduce a multi-index notation for derivatives commonly used in the theoryof partial differential equations. Let α = (α1, . . . , αn), where α1, . . . , αn are non-negativeintegers. Then we define
∂αf
∂zα= ∂αf
∂zα11 . . . ∂zαn
n,
α! = α1! · · ·αn!, and as earlier |α| = α1 + · · · + αn. As for differential forms we will by zα
mean zα11 · · · zαn
n . With help of these notations Corollary 4.15 can be written as∂αf
∂zα(z) = α!
(2πi)n
ˆ∂0D
f(ζ)(ζ1 − z1)α1+1 · · · (ζn − zn)αn+1 dζ.
Corollary 4.16. Let w ∈ Cn, r1, . . . , rn > 0 and D = D1(w1, r1) × · · · × D1(wn, rn).Assume that f is continuous on D and holomorphic on D. Then, the Taylor expansion off around w converges uniformly on each compact subset set of D.
31

Proof. By a change of variables we can without loss of generality assume that w = 0, andr1 = · · · = rn = 1. If ζ ∈ ∂0D and z ∈ D, then |zj/ζj | < 1 for j = 1, . . . , n, and
1ζj − zj
= 1ζj
11 − zj/ζj
= 1ζj
∞∑i=0
(zj
ζj
)i
.
Since ζ ∈ ∂0D, it holds that ∣∣∣∣∣ 1ζj
m∑i=0
(zj
ζj
)i∣∣∣∣∣ ≤
m∑i=0
|zj |i.
Now |zj | < 1 and therefore converges limm→∞∑m
i=0 |zj |i. Hence, by Weierstrass M-test, for
fixed z ∈ D, the partial sums of 1ζj
∑∞i=0
(zj
ζj
)i
converges uniformly on ∂0D. Hence, for eachζ ∈ ∂0D, and fixed z ∈ D, it holds that
1(ζ1 − z1) · · · (ζn − zn) = 1
ζ1 . . . ζn
∞∑α1=0
· · ·∞∑
αn=0
(z1
ζ1
)α1
. . .
(zn
ζn
)αn
= 1ζ1 . . . ζn
∞∑|α|=0
zα
ζα.
Let K ⊂ D be compact, and set Mi = supz∈K |zi|, M = M1 · · ·Mn. Then for ζ ∈ ∂0D andz ∈ K,∣∣∣∣∣∣
m∑|α|=0
zα
ζα
∣∣∣∣∣∣ ≤m∑
|α|=0
|z|α ≤m∑
|α|=0
Mα =m∑
α1=0· · ·
m∑αn=0
Mα11 · · ·Mαn
n =m∑
α1=0Mα1
1 · · ·m∑
αn=0Mαn
n .
Since z ∈ K ⊂ D, it holds that Mi < 1 for i = 1, . . . , n, and therefore the right-hand sideconverges as m → ∞. Thus, the partial sums of
∑∞|α|=0
zα
ζα converges uniformly on ∂0D×K
by Weierstrass M-test. From Theorem 4.14 it follows that for each z ∈ D,
f(z) = 1(2πi)n
ˆ∂0D
f(ζ)(ζ1 − z1) · · · (ζn − zn)dζ = 1
(2πi)n
ˆ∂0D
f(ζ)ζ1 · · · ζn
∞∑|α|=0
zα
ζαdζ
=∞∑
|α|=0
(1
(2πi)n
ˆ∂0D
f(ζ)ζα1+1
1 · · · ζαn+1n
dζ)zα =
∞∑|α|=0
1α!∂αf
∂zα(0)zα.
In the second step we used that the partial sums converges uniformly on ∂0D in order toswitch summation and integration. By the above analysis,
∞∑|α|=0
1α!∂αf
∂zα(0)zα
converges uniformly on compact subsets of D.
4.3. A Poincaré Lemma. By Lemma 4.6 it holds that ∂2ω = 0 for all differential forms.So, a natural question to ask is, if ∂ω = 0 on some open set Ω of Cn, do there exist adifferential form η on Ω such that ∂η = ω? This problem is known as the ∂-problem andwas solved for general subsets of Cn during the 1950s [8]. The same question for the exteriorderivative is also a well studied problem, and the answer depends on the topology of the setfor which the differential forms are defined, see e.g. [4].
32

In this section we will in Theorem 4.21 show that we can locally find a differential formη such that ∂η = ω if ∂ω = 0. In order to prove Theorem 4.21 we will need a couple oflemmas.
Lemma 4.17. Let F ∈ C10 (C). Then
F (ζ) = − 12πi
ˆC
∂F
∂z
dz ∧ dzz − ζ
, for all ζ ∈ C.
Proof. Fix ζ ∈ C, and choose R > |ζ| such that the support of F lies in z : |z| < R.Fix ε > 0 such that the ball of radius ε centred at ζ is contained in z : |z| < R. PutΩε = z : |z| < R and |z − ζ| > ε. Then, since z 6= ζ on Ωε, the 1-form Fdz/(z − ζ) iscontinuously differentiable on Ωε, and
d(Fdzz − ζ
)= ∂
∂z
(F
z − ζ
)dz ∧ dz = ∂F
∂z
dz ∧ dzz − ζ
.
By Stokes’ theorem, ˆΩε
d(Fdzz − ζ
)=ˆ
∂Ωε
Fdzz − ζ
. (4.3)
Since F = 0 on z : |z| = R, the right-hand side of (4.3) isˆ|z−ζ|=ε
Fdzz − ζ
= −ˆ 2π
0F(ζ + εeiθ
)idθ,
where we made the coordinate transformation z = ζ + εeiθ. Thus,ˆΩε
∂F
∂z
dz ∧ dzz − ζ
= −ˆ 2π
0F(ζ + εeiθ
)idθ.
By the assumption F ∈ C10 (C), it follows that
∣∣F (ζ + εeiθ)∣∣ is continuous on [0, 2π], and
therefore has a maximum. By Lebesgue’s dominated convergence theorem it now followsthat
limε→0
ˆ 2π
0F(ζ + εeiθ
)idθ =
ˆ 2π
0limε→0
F(ζ + εeiθ
)idθ = 2πiF (ζ).
By Example 3.19, 1/(z − ζ) is integrable on compact subsets of C, and if we let
χΩε(z) =
1, if z ∈ Ωε,
0, if z /∈ Ωε,
then ∣∣∣∣∂F∂z χΩε
z − ζ
∣∣∣∣ ≤∣∣∣∣∂F∂z
∣∣∣∣ 1|z − ζ|
,
where ∂F∂z /(z − ζ) is integrable on C since ∂F
∂z has compact support. Thus, ∂F∂z χΩε
/(z − ζ)is integrable on C for each ε > 0, so by Lebesgue’s dominated convergence theorem,
limε→0
ˆΩε
∂F
∂z
dz ∧ dzz − ζ
=ˆC
limε→0
χΩε
∂F
∂z
dz ∧ dzz − ζ
=ˆ
|z|<R
∂F
∂z
dz ∧ dzz − ζ
.
Hence, we showed that ˆ|z|<R
∂F
∂z
dz ∧ dzz − ζ
= −2πiF (ζ).
33

Since ∂F∂z = 0 for |z| > R, we have that
F (ζ) = − 12πi
ˆC
∂F
∂z
dz ∧ dzz − ζ
.
Lemma 4.18. Let φ ∈ C10 (C), and define
Φ(ζ) = − 12πi
ˆCφ(z)dz ∧ dz
z − ζ.
Then Φ ∈ C1(C), and ∂Φ∂ζ
= φ(ζ) for all ζ ∈ C.
Proof. Choose R > 0 such that the support of φ lies in z : |z| ≤ R. Let z′ = ζ − z suchthat dz ∧ dz = d
(ζ − z
)∧ d(ζ − z) = dz ∧ dz and
2πiΦ(ζ) =ˆ
|z|≤R
φ(z)dz ∧ dzζ − z
=ˆ
|z′−ζ|≤R
φ(ζ − z′)dz′ ∧ dz′
z′ =ˆCφ(ζ − z′)dz′ ∧ dz′
z′ .
We now aim to use Corollary 4.3. Therefore, we need to show that φ(ζ − z′)/z′ fulfils thehypothesis of Corollary 4.3. By Example 3.19, 1/z′ is integrable on compact subsets of C,and since φ ∈ C1
0 (C), it holds that φ(ζ − z′)/z′ is integrable on C. Also, ζ → φ(ζ − z′)is differentiable for z′ ∈ C \ 0 and is therefore differentiable except for a set of Lebesguemeasure zero. Since φ′(ζ − z′) is continuous and has compact support, it has a maximumon C, let it be denoted by M . Then it holds that
supζ∈C
∣∣∣∣φ′(ζ − z′)z′
∣∣∣∣ ≤ M
|z′|,
and z′ 7→ supζ∈C |φ′(ζ − z′)/z′| is therefore integrable. Thus, the hypothesis of Corollary 4.3is fulfilled and we can differentiate under the integral sign. So,
2πi∂Φ∂ζ
(ζ) =ˆC
∂
∂ζ(φ(ζ − z′))dz′ ∧ dz′
z′ =ˆC
∂φ
∂z(ζ − z′)dz′ ∧ dz′
z′ =ˆC
∂φ
∂z(z)dz ∧ dz
ζ − z.
From Lemma 4.17 it holds that
2πiφ(ζ) =ˆC
∂φ
∂z
dz ∧ dzζ − z
.
Hence, ∂Φ∂ζ = φ, and Φ ∈ C1(C).
For the rest of this essay we will let ∆n denote the closed unit polydisk in Cn centred atorigo, i.e.
∆n = D1(0, 1) × · · · × D1(0, 1)︸ ︷︷ ︸n−times
.
Lemma 4.19. Let Ω be a neighbourhood of ∆n and let f ∈ C∞(Ω) be given. Let j be afixed integer such that 1 ≤ j ≤ n. Assume that for some integer 1 ≤ s < n,
∂f
∂zk= 0 in Ω, for k = k1, . . . , ks, such that ki 6= j for i = 1. . . . , s.
Then we can find a neighbourhood Ω1 of ∆n and F ∈ C∞(Ω1) such that(i) ∂F
∂zj= f in Ω1, and
34

(ii) ∂F∂zk
= 0 in Ω1 for k = k1, . . . , ks.
Proof. Choose ε > 0 such that, if z = (z1, . . . , zn) ∈ Cn and |zi| < 1 + 2ε for i = 1, . . . , n,then z ∈ Ω.
Choose ψ ∈ C∞0 (C) such that the support is contained in z : |z| < 1+2ε, with ψ(z) = 1
for |z| < 1 + ε. Put
F (ζ1, . . . , ζj , . . . , ζn) = − 12πi
ˆCψ(z)f(ζ1, . . . , ζj−1, z, ζj+1, . . . , ζn)dz ∧ dz
z − ζj.
Fix now ζ1, . . . , ζj−1, ζj+1, . . . , ζn such that |ζi| < 1 + ε for each i 6= j. For |z| < 1 + 2ε, let
φ(z) = ψ(z)f(ζ1, . . . , ζj−1, z, ζj+1, . . . , ζn).
Then, φ(z) = 0 outside the support of ψ, and by using Lemma 4.18 we obtain that∂F
∂ζj
(ζ1, . . . , ζj , . . . , ζn) = φ(ζj) = f(ζ1, . . . , ζj , . . . , ζn),
when |ζj | < 1 + ε. Thus, property (i) holds. Property (ii) follows directly by differentiatingunder the integral sign with respect to ζk, for k = k1, . . . , ks, and by the assumption that∂f
∂ζk
= 0.
We are now ready to prove Theorem 4.21. The proof of Theorem 4.21 will be by inductionon the differential forms. For this we need the following definition.
Definition 4.20. A differential form∑I,J
CIJdzI ∧ dzJ
is said to be of level ν, if CIJ 6= 0 for each I and for each J such that J = (j1, . . . , ν) withj1 < · · · < ν, while CIJ = 0 for each I and for each J such that J = (j1, . . . , js), wherejs > ν.
Theorem 4.21 (A Poincaré Lemma). Let Ω be a neighbourhood of ∆n. Assume ω ∈∧p,q(Ω), q > 0, such that ∂ω = 0. Then there exists a neighbourhood Ω′ of ∆n and adiffenretial form η ∈
∧p,q−1(Ω′) such that ∂η = ω in Ω′.
Proof. Consider first a form ω of level 1 such that ∂ω = 0. Then, ω ∈∧p,1(Ω) for some p,
and it holds thatω =
∑I
aIdz1 ∧ dzI
where aI ∈ C∞(Ω) for each I. So,
0 = ∂ω =∑I,k
∂aI
∂zkdzk ∧ dz1 ∧ dzI .
Hence, ∂aI
zkdzk ∧ dzI ∧ dzI = 0 for each k and I. It follows that
∂aI
∂zk= 0, for k ≥ 2, and all I.
35

So, by Lemma 4.19 there exists for each I a function AI ∈ C∞(Ω1), where Ω1 is someneighbourhood of ∆n, such that ∂AI
∂z1= aI and ∂AI
∂zk= 0, for k = 2, . . . , n. Put ω =∑
I AIdzI ∈∧p,0(Ω1). Then,
∂ω =∑I,k
∂AI
∂zkdzk ∧ dzI = ω,
and we are finished with the case ν = 1.Assume now that the theorem holds for all differential forms of level less than or equal to
ν − 1, and let ω be of level ν such that ω ∈∧p,q(Ω) and ∂ω = 0. Decompose ω as a sum of
two differential forms, one of level ν (containing all terms of level ν) and the other of levelless than or equal to ν − 1 (containing the rest of the terms). Then we can find differentialforms α and β of level less than or equal to ν − 1, such that
ω = dzν ∧ α+ β.
Then, since ∂(dzν) = ∂(∂ + ∂)zν = ∂2zν = 0, it holds that0 = ∂ω = −dzν ∧ ∂α+ ∂β, (4.4)
or0 = dzν ∧ ∂α− ∂β.
Letα =
∑I,J
aIJdzI ∧ dzJ and β =∑I,J
bIJdzI ∧ dzJ .
Then, (4.4) gives that
0 = dzν ∧
∑I,J,k
∂aIJ
∂zkdzk ∧ dzI ∧ dzJ
−∑I,J,k
∂bIJ
∂zkdzk ∧ dzI ∧ dzJ .
Fix k > ν, and look at the right-hand side at all terms containing dzν ∧ dzk. Because bothα and β are of level less then ν, these are the terms on the form
dzν ∧ ∂aIJ
∂zkdzk ∧ dzI ∧ dzJ .
Hence, for each I and J , it holds that∂aIJ
∂zk= 0, for k > ν.
Then, by Lemma 4.19, there exists a neighbourhood Ω1 of ∆n such that for each I and Jthere exists a function AIJ ∈ C∞(Ω1) with
∂AIJ
∂zν= aIJ ,
∂AIJ
∂zk= 0, for k > ν.
Defineω1 =
∑I,J
AIJdzI ∧ dzJ ∈∧
p,q−1(Ω1),
then∂ω1 =
∑I,J,k
∂AIJ
∂zkdzk ∧ dzI ∧ dzJ =
∑I,J
aIJdzν ∧ dzI ∧ dzJ + γ,
36

where γ is a form of level less than or equal to ν − 1 containing the terms with ∂AIJ
∂zkfor
k < ν. Thus, ∂ω1 = dzν ∧ α + γ and ∂ω1 − ω = γ − β is a form of level ≤ ν − 1. It alsoholds that
∂(γ − β) = ∂(∂ω1 − ω
)= 0.
Hence, by the induction hypothesis, we can find a neighbourhood Ω2 of ∆n and τ ∈∧p,q−1(Ω2) with ∂τ = γ − β. Thus,∂(ω1 − τ) = ∂1 − ∂τ = ω + (γ − β) − (γ − β) = ω,
and ω1 − τ is the sought η.
37


5. The Oka Extension Theorem
In this section we will prove the Oka extension theorem, Theorem 5.5. The theoremstates that a function that is holomorphic on a neighbourhood of a p-polyhedron, definedbelow, can be extended to a holomorphic function on a polydisc at the cost of increasingthe dimension. This will help us prove the Oka-Weil theorem, Theorem 6.5, since, as wewill show, if a function f is holomorphic on a neighbourhood of a polynomially convex set,then there exists a p-polyhedron such that f is holomorphic on it. Thus, the Oka extensiontheorem gives us that all of the results regarding polydiscs in Section 4.2 becomes availablewhen we want to prove the Oka-Weil theorem.
Definition 5.1. Let Π ⊂ Cn. Then Π is a p-polyhedron if there exist holomorphic polyno-mials P1, . . . , Ps such that
Π = z ∈ Cn : |zj | ≤ 1 for j = 1, . . . , n and |Pk(z)| ≤ 1 for k = 1, . . . , s.
Remark 5.2. Let
P k(q1, . . . , qr) = z ∈ ∆k : |qj(z)| ≤ 1, j = 1, . . . , r,
where q1, . . . , qr are polynomials in z1, . . . , zk. Then P k(q1, . . . , qr) is a p-polyhedron. Notethat every p-polyhedron is on this form.
In order to prove Theorem 5.5, we need the following generalization of Theorem 4.21.
Theorem 5.3. Let Π be a p-polyhedron in Cn and Ω a neighbourhood of Π. If φ ∈∧p,q(Ω),
q > 0 such that ∂φ = 0, then there exists a neighbourhood Ω1 of Π and ψ ∈∧p,q−1(Ω1) with
∂ψ = φ on Ω1.
Proof. Study the p-polyhedronP k(q1, . . . , qr),
where the qj :s are polynomials in z1, . . . , zk. This proof will be by induction on r. If r = 0,then P k = ∆k, and the theorem holds for all k by Theorem 4.21. Fix r and assume that thetheorem holds for this r, for each k, and all differential forms of type (p, q), where q > 0.Let p1, . . . , pr+1 be polynomials in Cn. Consider φ ∈
∧p,q(Ω), ∂φ = 0, where Ω is someneighbourhood of Pn(p1, . . . , pr+1).
Define a mapu : Pn(p1, . . . , pr+1) → Pn+1(p1, . . . , pr)
byz 7→ (z, pr+1(z)).
Hence, formally p1, . . . , pr are polynomials in z1, . . . , zn+1 but they do not depend on zn+1.Let Σ denote the image of Pn(p1, . . . , pr+1) under u, and let π : Cn+1 → Cn be the projection
(z, zn+1) 7→ z.
Then,π u : z 7→ (z, pr+1(z)) 7→ z
is the identity map on Cn. Now, choose a neighbourhood Ω1 of Pn(p1, . . . , pr+1) withΩ1 ⊂ Ω. Let λ ∈ C∞(Cn) such that λ = 1 on Ω1 and λ = 0 outside Ω (see Lemma 1.69
39

in [9]). Put Φ = (λ · φ)(π) ∈∧p,q(
π−1(Ω)), we can extend Φ smoothly to whole Cn+1 by
setting Φ = 0 outside π−1(Ω) since λ = 0 outside Ω.Let χ be a form of type (p, q) defined in a neighbourhood of Pn+1(p1, . . . , pr), and set
Φ1 = Φ − (zn+1 − pr+1)χ.
Then, since zn+1 = pr+1(z) and λ(π) = 1 on Σ, it holds that Φ1 = Φ = φ(π) on Σ.We now want to choose χ such that Φ1 is ∂-closed, i.e.
0 = ∂Φ − ∂(zn+1 − pr+1(z))χ = ∂Φ − (zn+1 − pr+1(z))∂χ,
or
∂χ = ∂Φzn+1 − pr+1(z) . (5.1)
Note that by assumption it holds that ∂Φ = ∂φ(π) = 0 in a neighbourhood of Σ. Hence,we can take the right-hand side of (5.1) to be 0 in a neighbourhood of Σ, and ∂χ belongsto C∞ in a neighbourhood of Pn+1(p1, . . . , pr). Also,
∂
(∂Φ
zn+1 − pr+1(z)
)= ∂2Φzn+1 − pr+1(z) = 0.
So, by the induction hypothesis there exists a χ such that (5.1) holds. Then, Φ1 is ∂-closedin some neighbourhood of Pn+1(p1, . . . , pr). Hence, by the induction hypothesis again,there exists a (p, q − 1) form Ψ in a neighbourhood of Pn+1(p1, . . . , pr) with ∂Ψ = Φ1. Letψ = Ψ(u). Then, by Lemma 4.13,
∂ψ = (∂Ψ)(u) = Φ1(u) = Φ(u) − (pr+1(z) − pr+1(z))χ(u) = Φ(u) = φ(π(u)) = φ
on Ω1.
Lemma 5.4. Fix k and polynomials q1, . . . , qr in z1, . . . , zk. Let f be holomorphic in aneighbourhood W of Π = P k(q1, . . . , qr). Then there exists a holomorphic function F in aneighbourhood of Π′ = P k+1(q2, . . . , qr) such that
F (z, q1(z)) = f(z), for all z ∈ Π.
Proof. Note that if u : Ck → Ck+1 is the map z 7→ (z, q1(z)), then u(Π) ⊂ Π′. Letu(Π) = Σ ⊂ Π′. Thus, Σ is the set defined by
zk+1 − q1(z) = 0.
Let π be the projection(z, zk+1) 7→ z,
and choose φ ∈ C∞0(π−1(W )
)with φ = 1 in a neighbourhood of Σ.
The idea is now to find a function G defined in a neighbourhood of Π′ such that
F (z, zk+1) = φ(z, zk+1)f(z) − (zk+1 − q1(z))G(z, zk+1)
is holomorphic in a neighbourhood of Π′. Extend F to be defined on a neighbourhood of Π′
by setting φ · f = 0 outside π−1(W ). For F to be holomorhpic we require that ∂F = 0, i.e.
f · ∂φ = (zk+1 − q1(z))∂G,
40

or∂G = f · ∂φ
zk+1 − q1(z) = ω.
Note that since φ = 1 on a neighbourhood of Σ, the numerator disappear on this neighbour-hood. Hence, ω is a smooth differential form in some neighbourhood of Π′. Also ∂ω = 0 soby Proposition 5.3 we can find G such that ∂G = ω in some neighbourhood of Π′. Then Fis holomorphic on a neighbourhood of Π′, and
F (z, q1(z)) = φ(z, q1(z))f(z) − (q1(z) − q1(z))G(z, q1(z)) = f(z)for z ∈ Π.
Theorem 5.5 (The Oka Extension Theorem). Given f holomorphic in some neighbourhoodof a p-polyhedron Π = Pn(p1, . . . , pr), where p1, . . . , pr are holomorphic polynomials, thenthere exists a holomorphic function F defined on a neighbourhood of ∆n+r such that
F (z, p1(z), . . . , pr(z)) = f(z), for all z ∈ Π.
Proof. Let p1, . . . , pr be given polynomials in z1, . . . , zn, and let Π = Pn(p1, . . . , pr) be ap-polyhedron. Let f be holomorphic in a neighbourhood of Π. By Lemma 5.4 it holds thatthere exists a holomorphic function F1, holomorphic in a neighbourhood of Pn+1(p2, . . . , pr),such that F1(z, p1(z)) = f(z) for all z ∈ Π.
Assume that for some j ∈ 1, . . . , r − 1, there exists a function Fj holomorphic in aneighbourhood of Pn+j(pj+1, . . . , pr) such that
Fj(z, p1(z), . . . , pj(z)) = f(z), for all z ∈ Π.Then, again by Lemma 5.4, there exists a function Fj+1 holomorphic in a neighbourhoodof Pn+j+1(pj+2, . . . , pr) with Fj+1(ζ, pj+1(z)) = Fj(ζ), where
ζ = (z, zn+1, . . . , zn+j) ∈ Pn+j(pj+1, . . . , pr).But
Fj(z, p1(z), . . . , pj(z)) = f(z), for all z ∈ Π,so
Fj+1(z, p1(z), . . . , pj+1(z)) = f(z), for all z ∈ Π.Thus, by induction, for each j = 1, . . . , r, there exists a function Fj holomorphic in aneighbourhood of Pn+j(pj+1, . . . , pr) such that Fj(z, p1(z), . . . , pj(z)) = f(z) for all z ∈ Π.In particular, if j = r, then there exists a function F holomorphic in a neighbourhood of∆n+r with
F (z, p1(z), . . . , pr(z)) = f(z), for all z ∈ Π.
41


6. The Oka-Weil Theorem
We will now show the main result of the essay. The Oka-Weil theorem is formulated forpolynomially convex subsets of Cn. So, first we define the concept of polynomially convex.
Definition 6.1. Let K be a compact subset of Cn. The polynomially convex hull of K,denoted by h(K), is the set
h(K) =z ∈ Cn : |q(z)| ≤ max
x∈K|q(x)| for every polynomial q
.
If K = h(K), then K is said to be polynomially convex.
Remark 6.2. Clearly K ⊆ h(K), so to show that a set is polynomially convex, it is enoughto show that h(K) ⊆ K. If K is a compact subset of C, then K is polynomially convex if,and only if, C \K is connected, see Lemma 7.2 in [1] for a proof of this statement.
The next lemma shows an equivalent definition for a set to be polynomially convex.
Lemma 6.3. Let K be a compact subset of Cn. Then K is polynomially convex if, andonly if, for each y ∈ Cn \K we can find a polynomial p with
|p(y)| > maxx∈K
|p(x)|.
Proof. Firstly, assume that K is polynomially convex. If y ∈ Cn \K, then by definition ofpolynomially convex, there exist a polynomial p such that |p(y)| ≤ maxx∈K |p(x)| does nothold, i.e.
|p(y)| > maxx∈K
|p(x)|.
Next, assume that for each y ∈ Cn \K we can find a polynomial p with|p(y)| > max
x∈K|p(x)|.
Hence, y ∈ Cn \ K implies y /∈ h(K), and therefore h(K) ⊆ K. Since K ⊆ h(K) alwaysholds, this shows that K = h(K) and K is polynomially convex.
We have now almost got every result needed to prove Theorem 6.5, we just need thefollowing lemma.
Lemma 6.4. Let K be a compact polynomially convex subset of ∆n. Let O be an open setcontaining K. Then there exist a p-polyhedron Π with K ⊂ Π ⊂ O.
Proof. By Lemma 6.3 we can for each x ∈ ∆n \O find a polynomial px such that |px(x)| > 1and |px| ≤ 1 on K. Then, by the continuity of px, |px| > 1 in some neighbourhood Nx ofx. Since ∆n \ O is compact, there exists finitely many Nx1 , . . . , Nxr
such that their unioncover ∆n \O. Next, define Π by
Π = z ∈ ∆n : |pxi(z)| ≤ 1 for i = 1, . . . , r.
If we can show that K ⊂ Π and Π ⊂ O, we are finished. So if z ∈ K, then z ∈ Π. Thus,K ⊂ Π. Next, assume that z /∈ O. By construction Π ⊂ ∆n. So if z ∈ ∆n, then z ∈ ∆n \Oby the assumption of z. Hence, for some j, z ∈ Nxj , and
∣∣pxj (z)∣∣ > 1. Thus, z /∈ Π and
therefore Π ⊂ O.
43

With this we are in position to prove the Oka-Weil theorem.
Theorem 6.5 (The Oka-Weil Theorem). Let K be a compact, polynomially convex set inCn, n ≥ 1. Then, for every holomorphic function f defined on a neighbourhood of K, thereexists a sequence pi of holomorphic polynomials converging uniformly to f on K.
Remark 6.6. Note that with Remark 6.2, the case n = 1 is Runge’s theorem with the rationalfunctions being polynomials. Hence, the Oka-Weil theorem generalizes this special case ofRunge’s theorem to several complex variables.
Proof of Theorem 6.5. Since K is compact, it is bounded, and we can without loss of ge-nerality assume that K ⊂ ∆n. By assumption, f is holomorphic on a neighbourhood O ofK. By Lemma 6.4, there exists a p-polyhedron Π = Pn(p1, . . . , pr), where p1, . . . , pr areholomorphic polynomials, such that K ⊂ Π ⊂ O. Then, f is holomorphic in a neighbour-hood of Π. So, by the Oka extension theorem, we can find a function F holomorphic in aneighbourhood of ∆n+r satisfying
F (z, p1(z), . . . , pr(z)) = f(z), z ∈ Π.Then we can expand F in a Taylor series around 0. Since F is holomorphic in a neighbour-hood of ∆n+r, we can find a polydisk D such that ∆n+r ⊂ D and F is holomorphic on D.Then, by Corollary 4.16, the sequence Sj of partial sums of the Taylor series convergesuniformly to F on ∆n+r. Define the map
Φ : z 7→ (z, p1(z), . . . , pr(z))which maps Π into ∆n+r. Then, the sequence Sj converges uniformly to F on Φ(Π), i.e.
Sj(z, p1(z), . . . , pr(z))converges uniformly to F (z, p1(z), . . . , pr(z)) for z ∈ Π. But F (z, p1(z), . . . , pr(z)) = f(z)for z ∈ Π. Hence, Sj(z, p1(z), . . . , pr(z)) converges uniformly to f(z) on Π. Since each Sj isa polynomial in z, we have the required sequence.
The next example is a counterexample to the Oka-Weil theorem when K is not assumed tobe polynomially convex. In the example, two compact subsets which are both topologicallyequivalent to the circle are considered. One is polynomially convex while the other is not.We then show that on the set which is not polynomially convex, there exists a function whichcan not be approximated by holomorphic polynomials, and on the other set we argue for thatevery holomorpihc function can be approximated by holomorphic polynomials. This showsthat it is not possible in general to find a better results only depending on the topology ofthe compact set K. So, in some sense, the Oka-Weil theorem is a best possible result.
Example 6.7. Consider the two subsets K1 and K2 of C2 defined by,K1 =
(eiθ, 0
): 0 ≤ θ ≤ 2π
andK2 =
(eiθ, e−iθ
): 0 ≤ θ ≤ 2π.
It holds that K1 and K2 are compact. They are even topologically equivalent to each other(they are both homeomorphic to the circle).
Define f(z1, z2) = 1/z1 on K1. Then, f is holomorphic on a neighbourhood of K1,but restricted to K1, f(z1, z2) = z1. Assume that there do exists a sequence, pi, of
44

holomoprhic polynomials converging uniformly to z1 on K1. I.e. for each ε > 0 there existsa polynomial p such that
|p(z1, z2) − z1| < ε,
for each (z1, z2) ∈ K1. Since z2 = 0 on K1, this is equivalent to|p(z1, 0) − z1| < ε,
for each z1 ∈
eiθ : 0 ≤ θ ≤ 2π
. It holds that,
12πi
ˆ|z1|=1
z1dz1 = 12πi
ˆ 2π
0e−iθieiθdθ = 1.
Since p, with z2 = 0, is holomorphic on C, the Cauchy integral theorem (see Theorem 2.4.3in [5]) gives that ˆ
|z1|=1p(z1, 0)dz1 = 0.
Hence,
1 =
∣∣∣∣∣ 12πi
ˆ|z1|=1
z1dz1
∣∣∣∣∣ =
∣∣∣∣∣ 12πi
ˆ|z1|=1
(z1 − p(z1, 0))dz1
∣∣∣∣∣ < 12π
ˆ|z1|=1
|z1 − p(z1, 0)|dz1 < ε.
Thus we have a contradiction, and f can not be approximated by holomorphic polynomialson K1.
Contrary on K2 it holds that z1 = e−iθ = z2 and z2 = z1. Therefore, if p is a polynomialin z1, z2, then p is also a polynomial in z1, z2. Hence, the algebra of polynomials is closedunder conjugation, and by the complex Stone-Weierstrass theorem (see e.g. Theorem 36.Bin [14]), every continuous function on K2 is uniformly approximable by polynomials in z1, z2.
This shows that the assumption of polynomial convexity can not be relaxed. Indeed, K1is not polynomially convex. If p is a polynomial of z1, z2 then if we take z2 = 0, p is apolynomial of only z1. Since the projection of K1 to the first component is the boundaryof the unit disk on C, the maximum modulus principle gives that |p| attains its maximumon K1. Hence, for any point w ∈ D1(0, 1) it holds that |p(w, 0)| ≤ maxx∈K1 |p(x)|. So,(w, 0) ∈ h(K1), and K1 is not polynomially convex.
45


7. Acknowledgements
First, I would like thank my supervisor Per Åhag for giving invaluable feedback duringthe construction of this essay, but also for inspiring lectures which motivated me to delvedeeper into the subject of mathematics. I would also like to thank Aron Persson and myexaminer Olow Sande, for taking time to read my essay, and for giving important feedbackwhich greatly improved this essay.
47


8. References[1] Herbert Alexander and John Wermer, Several complex variables and banach algebras, Vol. 35, Springer
Science & Business Media, 1998.[2] Juliusz Brzezinski, Linjär och multilinjär algebra (2004),
available at http://www.math.chalmers.se/~jub/JUB-filer/LINALG/linalgin.pdf.[3] Herbert Federer, Geometric measure theory, Springer, 2014.[4] William Fulton, Algebraic topology: a first course, Vol. 153, Springer Science & Business Media, 2013.[5] Robert Everist Greene and Steven George Krantz, Function theory of one complex variable, Vol. 40,
American Mathematical Soc., 2006.[6] Lars Hörmander, An introduction to complex analysis in several variables, Vol. 7, Elsevier, 1973.[7] Achim Klenke, Probability theory: a comprehensive course, Springer Science & Business Media, 2013.[8] Steven George Krantz, Function theory of several complex variables, Vol. 340, American Mathematical
Soc., 2001.[9] Jeffrey M Lee, Manifolds and differential geometry, Vol. 107, American Mathematical Society Provi-
dence, 2009.[10] Ib H Madsen and Jørgen Tornehave, From calculus to cohomology: de rham cohomology and characte-
ristic classes, Cambridge University Press, 1997.[11] Kiyosi Oka, Domaines convexes par rapport aux fonctions rationnelles, J. Science of the Hiroshima
University 6 (1936), 245–255.[12] Walter Rudin, Principles of mathematical analysis, Vol. 3, McGraw-Hill New York, 1964.[13] , Real and complex analysis, Tata McGraw-Hill Education, 1987.[14] George F Simmons, Introduction to topology and modern analysis, Tokyo, 1963.[15] Loring W Tu, An introduction to manifolds, Springer Science & Business Media, 2010.[16] Karl Weierstrass, Über die analytische darstellbarkeit sogenannter willkürlicher functionen einer reellen
veränderlichen, Sitzungsberichte der Königlich Preußischen Akademie der Wissenschaften zu Berlin 2(1885), 633–639.
[17] André Weil, L’intégrale de cauchy et les fonctions de plusieurs variables, Mathematische Annalen 111(1935), no. 1, 178–182.
[18] Wilhelm Wirtinger, Zur formalen theorie der funktionen von mehr komplexen veränderlichen, Mathe-matische Annalen 97 (1927), no. 1, 357–375.
49