The Language of Movement Eshkol Wachman Movement Notation (EWMN)
25
The Language of Movement Eshkol Wachman Movement Notation (EWMN)
-
Upload
linda-bates -
Category
Documents
-
view
221 -
download
7
Transcript of The Language of Movement Eshkol Wachman Movement Notation (EWMN)

The Language of Movement
Eshkol Wachman Movement Notation (EWMN)

• EWMN is a language for the description of the movement of the human body.
• It was developed in Israel by Professors Noa Eshkol and Avraham Wachman. Movement Notation, their original book introducing the system, was published in 1958.
• It is now being applied in the fields of dance, choreography, physical therapy, anthropology, neuroscience, graphics, and physiological psychology.

EMWN assumes one general form that will stand conceptually for all bodies.
In that form each limb is reduced to its longitudinal axis, an imaginary straight line of unchanging length.
These axes are analogous to the skeletal structure of the body.

• All the movements of a single axis of constant length, free to move about one fixed end, will be enclosed by a sphere.
• Every limb is regarded as such an axis and the curves described on the surface of the sphere are typically circles or parts of circles.
• Therefore, the circle and its division provides the essential measure for all positions and movements. A coordinate System of Reference (SoR) is employed in which each limb segment is regarded as the radius of a sphere.

EWMN System of Reference
The orientation of the SoR is such that its central axis is perpendicular to the ground and the plane of the equator- the horizontal plane- is parallel to the ground.

• The equator of the sphere, parallel to the ground is called the horizontal plane.
• One direction on this plane is selected as the starting position for all measurement and is named “Zero Direction”.
(0)

(0)
(4)
(6)
(2)(5)
(1)
The Horizontal Plane
(3)
(7)1 = 45°
When one unit equals 45 ° the horizontal plane is divided intoeight directions.

The Vertical Circles
The vertical great circles coincide with the
horizontal coordinates. Each vertical
circle can be identified and referred to in
relation to one or the other of the radii
which comprise its horizontal diameter.
The vertical axis is the unique common
diameter of all vertical circles.

(“Up”)
(“left”)
(“down”)
(“right”)
(“backward”)
(“forward”)
Vertical Circles of the SoR

(0)
(4)
(6)
(2)(5)
(1)
(3)
(7)
The Vertical Planes

When 1=45º all 26 positions (i.e. directions) can be expressed in terms of the coordinate grid of the SoR.

3
3
7
1
2
0
4
1=45º
2 6
1
5
0
4
( )40
( )00

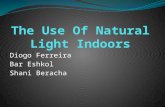
Position
A position on the surface of the sphere is now identified as the intersection of a direction on the horizontal plane with a vertical circle. This is written as two numbers in parentheses. The lower represents the horizontal coordinate and the upper represents the vertical.
1=45º
( )20
( )10
( )30
( )22 ( )2
6
( )40
( )00

Examples of Positionsfor Upper arm and Forearm
1. Upper arm vertically downward; forearm forward.2. Upper arm forward parallel to the ground; forearm straight upward.3. Upper arm straight upward; forearm to the left above the head.4. Upper arm to the right side; forearm straight forward.5. Upper arm in right forward diagonal at shoulder height; forearm in right
forward diagonal and diagonally upward.6. Upper arm in right forward diagonal, diagonally downward; forearm in
right forward diagonal parallel to the ground7. Upper arm forward and diagonally downward; forearm fully flexed.

Movement Classification• The axis of movement is a position in the SoR in
relation to which a limb moves.• The expression of a movement as the angular
relation between the axis of the limb and the axis of movement, yields three distinct classes.
• These are named Plane, Conical, and Rotatory Movement.

Plane MovementWhen the angle between the axis of movement and the axis of limb is 90° the limb
traces a path which coincides with the circumference of a great circle in the SoR.

Curved Movement: ConicalCurved movement is movement in which the angle between the
axis of movement and the axis of limb is less than 90 ° and greater than 0 °. The movement of the whole limb is conceived as sweeping a conical surface.

Rotatory MovementThe angular relation between the axis of movement and the axis of limb is 0° (i.e. the axes coincide). The limb remains ‘in its place’. This type of movement is perceptible through the changing relation of the limb surfaces to their initial states.

In writing any movement, it will be necessary to indicate:
Type of movement – Plane, Conical, or Rotatory
Amount of movement – The size of the arc actually described by the moving limb.
Spatial orientation – Where the path of movement lies relative to the SoR.
Sense – Positive or negative (‘clockwise’ or ‘counterclockwise’).

Law of Light and Heavy Limb
The limbs of the moving body are characterized as activeor carried. An actively moving limb is called heavy and its movement changes the location and modifies the paths of movement of any lighter limb which it carries.
The terms light and heavy do not refer to the actual weight of the limbs, but are figurative. The phenomenon itself is real, however, an inevitable property of the human body in movement.
The relation of torso and upper limbs remains constant while the torso – the heaviest limb – moves.

Any limb which is in contact with the ground and carries the weight of the body is the base of the body. The hierarchy of limbs heavy to light begins from the base and continues through all adjacent limbs, according to the structure of the body and its situation.
Law of Light and Heavy Limb

Zero Position Zero position consists
of normal standing position with the feet parallel, the arms at the sides of the body, and the palms of the hands facing inwards. In relation to the SoR the body is facing absolute direction 0.

In EWMN manuscript page the horizontal spaces represent limbs and the lines which separate them represent the joints connecting each limb to its neighbor. The spaces are identified at the beginning of the score by the names of the limbs in any natural language. Abbreviated forms of the names may be used, according to the language employed.
Vertical lines divide the manuscript system into columns denoting units of time and the symbols of movements are written in order from left to right.
The Manuscript Page

Hand H
Forearm F.a
Upper Arm U.a
Shoulder Sh
Hand H
Forearm F.a
Upper Arm U.a
Shoulder Sh
Head Hd
Neck N
Chest Ch
Pelvis Plv
Thigh Th
Lower Leg L.l
Foot Ft
Thigh Th
Lower Leg L.l
Foot Ft
LL
Left
Arm
Rig
ht
Arm
Upper
Body
Rig
ht
Leg
Left
Leg
LA
RA
UB
RL
Starting Position