The Influence of Slowly Varying Mass on Severity of Dynamics Nonlinearity of Bearing ... · 2019....
12
Research Article The Influence of Slowly Varying Mass on Severity of Dynamics Nonlinearity of Bearing-Rotor Systems with Pedestal Looseness Mian Jiang , Jigang Wu, and Shuangqi Liu Hunan Provincial Key Laboratory of Health Maintenance for Mechanical Equipment, Hunan University of Science and Technology, Xiangtan 411201, China Correspondence should be addressed to Mian Jiang; [email protected] Received 14 November 2017; Accepted 23 January 2018; Published 22 February 2018 Academic Editor: Gabriele Cazzulani Copyright © 2018 Mian Jiang et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Nonlinearity measure is proposed to investigate the influence of slowly varying mass on severity of dynamics nonlinearity of bearing-rotor systems with pedestal looseness. A nonlinear mathematical model including the effect of slowly varying disk mass is developed for a bearing-rotor system with pedestal looseness. e varying of equivalent disk mass is described by a cosine function, and the amplitude coefficient is used as a control parameter. en, nonlinearity measure is employed to quantify the severity of dynamics nonlinearity of bearing-rotor systems. With the increasing of looseness clearances, the curves that denote the trend of nonlinearity degree are plotted for each amplitude coefficient of mass varying. It can be concluded that larger amplitude coefficients of the disk mass varying will have more influence on the severity of dynamics nonlinearity and generation of chaotic behaviors in rotor systems with pedestal looseness. 1. Introduction Rotor systems with slowly varying mass are fundamental components of various machines in the textile, paper, process, and cable industries. With the increasing of the velocity of the machine, its efficiency is usually decreased by vibrations and chaotic motion appeared in the rotor systems. When pedestal looseness occurs in the rotor systems, it has great impacts on the stability and work performance because of the existing complicated vibration characteristics and chaotic behaviors [1, 2]. Usually, the effect of slowly mass variation is neglected for vibration response of rotor systems, and only few results are published for this topic [3–5]. However, experimental and practical investigations show that the varying mass of the rotor has to be taken into consideration to explain some nonlinear phenomena of dynamics appearing in such systems with faults [6]. In diagnosing pedestal looseness of rotor systems with slowly varying mass, it is very important to investigate the influence of slowly varying mass on nonlinear dynamical behaviors of these rotor systems. Extensive research has been achieved on the analysis and diagnosis of pedestal looseness in rotor systems in the past decades [7–15]. Goldman and Muszynska [16, 17] developed a bilinear model for an unbalanced rotor/bearing/stator system with looseness faults, and chaotic characteristics of responses were observed. Chu and Tang [1] analyzed the periodic, quasi-periodic, and chaos characteristics of a rotor-bearing system with pedestal looseness in which rotating speed and imbalance are considered as the control parameters. Ji and Zu [18] analyzed the vibration characteristics of an autonomous bearing-rotor system with supporting looseness using the multiscale method. ese mathematical models based meth- ods mainly focus on the impacts of pedestal looseness on the nonlinear vibration characteristics of rotor systems; the influence of varying disk mass is not considered and analyzed. As a powerful technique, finite element (FE) method is also employed to analyze the dynamics of bearing-rotor systems with pedestal looseness [19–21]. Although different mass, moment inertia, and looseness clearance are included easily to study the influences on the dynamic characteristics, the variances of severity of dynamical nonlinearity are not inves- tigated yet. Recently, nonlinearity measure based assessment method for pedestal looseness of rotor systems is proposed by Jiang et al. [22]. e values of nonlinearity measure denote Hindawi Shock and Vibration Volume 2018, Article ID 3795848, 11 pages https://doi.org/10.1155/2018/3795848
Transcript of The Influence of Slowly Varying Mass on Severity of Dynamics Nonlinearity of Bearing ... · 2019....
-
Research ArticleThe Influence of Slowly Varying Mass on Severity of DynamicsNonlinearity of Bearing-Rotor Systems with Pedestal Looseness
Mian Jiang , JigangWu, and Shuangqi Liu
Hunan Provincial Key Laboratory of Health Maintenance for Mechanical Equipment, Hunan University of Science and Technology,Xiangtan 411201, China
Correspondence should be addressed to Mian Jiang; [email protected]
Received 14 November 2017; Accepted 23 January 2018; Published 22 February 2018
Academic Editor: Gabriele Cazzulani
Copyright © 2018 Mian Jiang et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Nonlinearity measure is proposed to investigate the influence of slowly varying mass on severity of dynamics nonlinearity ofbearing-rotor systems with pedestal looseness. A nonlinear mathematical model including the effect of slowly varying disk mass isdeveloped for a bearing-rotor systemwith pedestal looseness.The varying of equivalent diskmass is described by a cosine function,and the amplitude coefficient is used as a control parameter. Then, nonlinearity measure is employed to quantify the severity ofdynamics nonlinearity of bearing-rotor systems. With the increasing of looseness clearances, the curves that denote the trend ofnonlinearity degree are plotted for each amplitude coefficient of mass varying. It can be concluded that larger amplitude coefficientsof the disk mass varying will have more influence on the severity of dynamics nonlinearity and generation of chaotic behaviors inrotor systems with pedestal looseness.
1. Introduction
Rotor systems with slowly varying mass are fundamentalcomponents of variousmachines in the textile, paper, process,and cable industries.With the increasing of the velocity of themachine, its efficiency is usually decreased by vibrations andchaotic motion appeared in the rotor systems.When pedestallooseness occurs in the rotor systems, it has great impacts onthe stability and work performance because of the existingcomplicated vibration characteristics and chaotic behaviors[1, 2]. Usually, the effect of slowly mass variation is neglectedfor vibration response of rotor systems, and only few resultsare published for this topic [3–5]. However, experimentaland practical investigations show that the varying mass ofthe rotor has to be taken into consideration to explain somenonlinear phenomena of dynamics appearing in such systemswith faults [6]. In diagnosing pedestal looseness of rotorsystems with slowly varying mass, it is very important toinvestigate the influence of slowly varying mass on nonlineardynamical behaviors of these rotor systems.
Extensive research has been achieved on the analysis anddiagnosis of pedestal looseness in rotor systems in the past
decades [7–15]. Goldman andMuszynska [16, 17] developed abilinearmodel for an unbalanced rotor/bearing/stator systemwith looseness faults, and chaotic characteristics of responseswere observed. Chu and Tang [1] analyzed the periodic,quasi-periodic, and chaos characteristics of a rotor-bearingsystem with pedestal looseness in which rotating speed andimbalance are considered as the control parameters. Ji and Zu[18] analyzed the vibration characteristics of an autonomousbearing-rotor system with supporting looseness using themultiscale method. These mathematical models based meth-ods mainly focus on the impacts of pedestal looseness onthe nonlinear vibration characteristics of rotor systems; theinfluence of varying diskmass is not considered and analyzed.As a powerful technique, finite element (FE) method is alsoemployed to analyze the dynamics of bearing-rotor systemswith pedestal looseness [19–21]. Although different mass,moment inertia, and looseness clearance are included easilyto study the influences on the dynamic characteristics, thevariances of severity of dynamical nonlinearity are not inves-tigated yet. Recently, nonlinearity measure based assessmentmethod for pedestal looseness of rotor systems is proposedby Jiang et al. [22].The values of nonlinearity measure denote
HindawiShock and VibrationVolume 2018, Article ID 3795848, 11 pageshttps://doi.org/10.1155/2018/3795848
http://orcid.org/0000-0003-3177-7309https://doi.org/10.1155/2018/3795848
-
2 Shock and Vibration
cbkb
o3
o2o1
m1c1
c2m(t)
m3
k
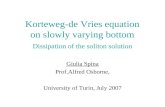
Figure 1: Bearing-rotor system with single pedestal looseness.
the severity of nonlinearity in the dynamics of rotor systemswith different looseness clearances, which can also reflectthe different dynamical behaviors such as periodic, quasi-periodic, and chaotic motions. It provides a numerical toolto discuss the influence of slowly varying mass on severity ofdynamics nonlinearity of bearing-rotor systems.
In this paper, nonlinearity measure is employed to inves-tigate the influence of slowly varying mass on severity ofdynamics nonlinearity of bearing-rotor systemswith pedestallooseness. A nonlinear mathematical model that includes theeffect of slowly disk mass varying is developed for a bearing-rotor system with pedestal looseness. Then, nonlinearitymeasure method is employed to quantify the severity ofnonlinearity degree for dynamics of bearing-rotor systemswith different looseness clearances.The amplitude coefficientof diskmass varying is used as a control parameter to performa detailed investigation of nonlinear dynamical behaviors ofthe bearing-rotor system. With a given amplitude coefficient,looseness clearances are used to simulate the dynamicsof rotor systems and conduct the nonlinearity measure.According to the trend of nonlinearity degree, it can be foundthat a big amplitude coefficient of the disk mass varyingwill have more impacts on the severity of dynamics; chaoticbehaviors will be observed more easily in rotor system withthe increasing of looseness clearances.
This paper is organized as follows. The governing equa-tions considering slowly varying mass for a bearing-rotorsystem with pedestal looseness are developed in Section 2.Assessment of severity of nonlinearity via nonlinearity mea-sures is presented in Section 3. The influences of disk massvarying on dynamical behaviors are discussed in Section 4.1,while those on values of nonlinearitymeasure are investigatedin Section 4.2. Concluding remarks are discussed in Section 5.
2. Governing Equations for Bearing-RotorSystems with Pedestal Looseness
The considered rotor system with pedestal looseness andtime-dependent diskmass varying is shown in Figure 1.Thereare two identical oil film bearings at both sides of the rotorsystem, and the shaft sections are considered to be elastic and
massless. The equivalent lumped mass in the position of thebearings is𝑚1 and the lumpedmass of the pedestal involvingthe looseness is 𝑚3. The lumped mass in the position of thedisk is assumed to be time-variant which is defined as a cosinefunction:
𝑚(𝜏) = 𝑚0 (1 + 𝜆 cos (𝜔𝜏)) 𝜏 = 𝜀𝑡 𝜀 ≤ 1, (1)where 𝑚0 is the average mass of the disk, 𝜆 is the amplitudecoefficient of mass varying, 𝜔 is the angular velocity of therotor system, 𝜏 is the mass varying time, and 𝜀 is the timecoefficient of mass varying.
In Figure 1, 𝑐1, 𝑐2 are the equivalent damping coefficientsin the positions of bearing and disk, respectively, while 𝑘 isthe stiffness coefficient of the shaft. It is assumed that theleft support has the single pedestal looseness; the maximumstatic gap of the looseness is 𝛿. The foundation to thepedestal is equivalent to a spring-damping system with thestiffness coefficient 𝑘𝑏 and damping coefficient 𝑐𝑏, which canbe expressed using the following piecewise linear structure[1]:
𝑘𝑏 = {{{{{{{{{𝑘𝑏1 𝑦4 < 00 0 ≤ 𝑦4 ≤ 𝛿𝑘𝑏3 𝑦4 > 𝛿;
𝑐𝑏 = {{{{{{{{{𝑐𝑏1 𝑦4 < 0𝑐𝑏2 0 ≤ 𝑦4 ≤ 𝛿𝑐𝑏3 𝑦4 > 𝛿.
(2)
It is assumed that the horizontal and vertical displace-ments in the right-bearing position are 𝑥1, 𝑦1, in the diskposition 𝑥2, 𝑦2, and in the left-bearing position 𝑥3, 𝑦3. Thehorizontal movement of the left pedestal is small and consid-ered to be negligible. Its displacement in the vertical directionis 𝑦4. The governing equations 𝑁(𝜔) for the bearing-rotorsystem with left pedestal looseness can then be written asfollows:
-
Shock and Vibration 3
𝑁(𝜔) :
{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{
𝑚1�̈�1 + 𝑐1�̇�1 + 𝑘 (𝑥1 − 𝑥2) = 𝐹𝑥 (𝑥1, 𝑦1, �̇�1, ̇𝑦1)𝑚1 ̈𝑦1 + 𝑐1 ̇𝑦1 + 𝑘 (𝑦1 − 𝑦2) = 𝐹𝑦 (𝑥1, 𝑦1, �̇�1, ̇𝑦1) − 𝑚1𝑔𝑑𝑑𝑡 (𝑚 (𝜏) �̇�2) + 𝑐2�̇�2 + 𝑘 (𝑥2 − 𝑥1) + 𝑘 (𝑥2 − 𝑥3) = 𝑚 (𝜏) 𝑒𝑏𝜔2 cos (𝜔𝑡)𝑑𝑑𝑡 (𝑚 (𝜏) ̇𝑦2) + 𝑐2 ̇𝑦2 + 𝑘 (𝑦2 − 𝑦1) + 𝑘 (𝑦2 − 𝑦3 − 𝑦4) = 𝑚 (𝜏) (𝑒𝑏𝜔2 sin (𝜔𝑡) − 𝑔)𝑚1�̈�3 + 𝑐1�̇�3 + 𝑘 (𝑥3 − 𝑥2) = 𝐹𝑥 (𝑥3, 𝑦3 − 𝑦4, �̇�3, ̇𝑦3 − ̇𝑦4)𝑚1 ̈𝑦3 + 𝑐1 ̇𝑦3 + 𝑘 (𝑦3 + 𝑦4 − 𝑦2) = 𝐹𝑦 (𝑥3, 𝑦3 − 𝑦4, �̇�3, ̇𝑦3 − ̇𝑦4) − 𝑚1𝑔𝑚3 ̈𝑦4 + 𝑐𝑏 ̇𝑦4 + (𝑘𝑦4 + 𝑘𝑏𝑦4) = −𝐹𝑦 (𝑥3, 𝑦3 − 𝑦4, �̇�3, ̇𝑦3 − ̇𝑦4) − 𝑚3𝑔,
(3)
where 𝑒𝑏 is the unbalance and 𝜔 is the rotating speed.In (3), 𝐹𝑥(𝑥1, 𝑦1, �̇�1, ̇𝑦1) and 𝐹𝑦(𝑥1, 𝑦1, �̇�1, ̇𝑦1) denote the
horizontal and vertical force components of the oil film in theright bearing, while 𝐹𝑥(𝑥3, 𝑦3−𝑦4, �̇�3, ̇𝑦3− ̇𝑦4) and 𝐹𝑦(𝑥3, 𝑦3−𝑦4, �̇�3, ̇𝑦3 − ̇𝑦4) are those of the left bearing. The nonlinearforces components from the journal bearing are obtainedunder the short bearing theory [23]:𝐹𝑥 = 𝑠𝑓𝑥,𝐹𝑦 = 𝑠𝑓𝑦, (4)where 𝐹𝑥, 𝐹𝑦 denote the horizontal and vertical forcecomponents of the oil film. The adjustment factor 𝑠 =𝜇𝜔𝑅𝐿[𝑅/𝑐]2[𝐿/2𝑅]2,𝜔 is the rotating speed,𝑅 is the radius ofbearing, 𝐿 is the length of bearing, 𝑐 is the bearing clearance,and 𝜇 is the oil viscosity. The force components 𝑓𝑥, 𝑓𝑦 can beobtained using the following equations:
[𝑓𝑥𝑓𝑦] =√(𝑥 − 2 ̇𝑦)2 + (𝑦 + 2�̇�)21 − 𝑥2 − 𝑦2× [3𝑥𝑉 − sin𝛽𝐸 − 2 cos𝛽𝑆3𝑦𝑉 + cos𝛽𝐸 − 2 sin𝛽𝑆] ,
(5)
where 𝑉, 𝐸, 𝑆, 𝛽 can be represented as𝑉 (𝑥, 𝑦, 𝛽) = 2 + (𝑦 cos𝛽 − 𝑥 sin𝛽) 𝐸1 − 𝑥2 − 𝑦2 ,𝑆 (𝑥, 𝑦, 𝛽) = 𝑥 cos𝛽 + 𝑦 sin𝛽1 − (𝑥 cos𝛽 + 𝑦 sin𝛽)2 ,𝐸 (𝑥, 𝑦, 𝛽) = 2√1 − 𝑥2 − 𝑦2 (𝜋2+ arctan((𝑦 cos𝛽 − 𝑥 sin𝛽)√1 − 𝑥2 − 𝑦2 )),
𝛽 (𝑥, 𝑦) = arctan 𝑦 + 2�̇�𝑥 − 2 ̇𝑦 − 𝜋2 sign(𝑦 + 2�̇�𝑥 − 2 ̇𝑦) − 𝜋2⋅ sign (𝑦 + 2�̇�) .
(6)
Because 𝑑/𝑑𝑡 = (𝑑/𝑑𝜏)(𝑑𝜏/𝑑𝑡) = 𝜀(𝑑/𝑑𝜏), (3) can berewritten as follows:
𝑁(𝜔) :
{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{
𝑚1�̈�1 + 𝑐1�̇�1 + 𝑘 (𝑥1 − 𝑥2) = 𝐹𝑥 (𝑥1, 𝑦1, �̇�1, ̇𝑦1)𝑚1 ̈𝑦1 + 𝑐1 ̇𝑦1 + 𝑘 (𝑦1 − 𝑦2) = 𝐹𝑦 (𝑥1, 𝑦1, �̇�1, ̇𝑦1) − 𝑚1𝑔�̈�2 + 𝑐2 (𝜏) �̇�2 + 𝑘 (𝜏) (𝑥2 − 𝑥1) + 𝑘 (𝜏) (𝑥2 − 𝑥3) = 𝑒𝑏𝜔2 cos (𝜔𝑡)̈𝑦2 + 𝑐2 (𝜏) ̇𝑦2 + 𝑘 (𝜏) (𝑦2 − 𝑦1) + 𝑘 (𝜏) (𝑦2 − 𝑦3 − 𝑦4) = 𝑒𝑏𝜔2 sin (𝜔𝑡) − 𝑔𝑚1�̈�3 + 𝑐1�̇�3 + 𝑘 (𝑥3 − 𝑥2) = 𝐹𝑥 (𝑥3, 𝑦3 − 𝑦4, �̇�3, ̇𝑦3 − ̇𝑦4)𝑚1 ̈𝑦3 + 𝑐1 ̇𝑦3 + 𝑘 (𝑦3 + 𝑦4 − 𝑦2) = 𝐹𝑦 (𝑥3, 𝑦3 − 𝑦4, �̇�3, ̇𝑦3 − ̇𝑦4) − 𝑚1𝑔𝑚3 ̈𝑦4 + 𝑐𝑏 ̇𝑦4 + (𝑘𝑦4 + 𝑘𝑏𝑦4) = −𝐹𝑦 (𝑥3, 𝑦3 − 𝑦4, �̇�3, ̇𝑦3 − ̇𝑦4) − 𝑚3𝑔,
(7)
-
4 Shock and Vibration
Nonlinear system
Linear systemvia Taylor expansion
Rotating speed
Nonlinear dynamics
Error
Linear dynamics
Figure 2: Setup for nonlinearity measure for dynamics of rotor systems.
where 𝑐2(𝜏) = (𝑐2+𝜀𝑚(𝜏))/𝑚(𝜏), 𝑘(𝜏) = 𝑘/𝑚(𝜏), and𝑚(𝜏) =𝑑𝑚(𝜏)/𝑑𝑡 = −𝜆𝜔𝑚0 sin(𝜔𝜏).3. Assessment of Severity of Nonlinearity viaNonlinearity Measures
In this paper, nonlinearity measures [24] are employedto assess the severity of dynamics nonlinearity of rotor-bearing systems with pedestal looseness. The nonlinearitymeasure represents an approach to systematically quantifythe degree of nonlinearity for dynamical systems, which isalready applied to assessment for pedestal looseness of rotor-bearing systems by Jiang et al. [22]. The fundamental idea
underlying nonlinearity measure is to compare the dynamicbehaviors of the nonlinear systems (3) with a linear systemvia Taylor expansions in an appropriate setup [24]. The setupfor nonlinearity measures can be depicted in Figure 2.
The critical point is to find a linear approximated systemon the vicinity of the equilibrium position (𝑥0, 𝑦0) by Taylorexpansion. In (3), oil film force components are the source ofnonlinearity and have nonlinear characteristics.Then, Taylorexpansions are employed to obtain the linear approximationsof the oil film force components.These linear approximationswill have a good accuracy because of the small perturbationson oil films from the vibrations amplitudes or velocity.Therefore, a linear system 𝐿(𝜔) developed to approximate thedynamics of (3) is given as follows:
𝐿 (𝜔) :
{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{
𝑚1�̈�1 + 𝑐1�̇�1 + 𝑘 (𝑥1 − 𝑥2) = 𝐹𝑥 (𝑥1, 𝑦1, �̇�1, ̇𝑦1)𝑚1 ̈𝑦1 + 𝑐1 ̇𝑦1 + 𝑘 (𝑦1 − 𝑦2) = 𝐹𝑦 (𝑥1, 𝑦1, �̇�1, ̇𝑦1) − 𝑚1𝑔�̈�2 + 𝑐2 (𝜏) �̇�2 + 𝑘 (𝜏) (𝑥2 − 𝑥1) + 𝑘 (𝜏) (𝑥2 − 𝑥3) = 𝑒𝑏𝜔2 cos (𝜔𝑡)̈𝑦2 + 𝑐2 (𝜏) ̇𝑦2 + 𝑘 (𝜏) (𝑦2 − 𝑦1) + 𝑘 (𝜏) (𝑦2 − 𝑦3 − 𝑦4) = 𝑒𝑏𝜔2 sin (𝜔𝑡) − 𝑔𝑚1�̈�3 + 𝑐1�̇�3 + 𝑘 (𝑥3 − 𝑥2) = 𝐹𝑥 (𝑥3, 𝑦3 − 𝑦4, �̇�3, ̇𝑦3 − ̇𝑦4)𝑚1 ̈𝑦3 + 𝑐1 ̇𝑦3 + 𝑘 (𝑦3 + 𝑦4 − 𝑦2) = 𝐹𝑦 (𝑥3, 𝑦3 − 𝑦4, �̇�3, ̇𝑦3 − ̇𝑦4) − 𝑚1𝑔𝑚3 ̈𝑦4 + 𝑐𝑏 ̇𝑦4 + (𝑘𝑦4 + 𝑘𝑏𝑦4) = −𝐹𝑦 (𝑥3, 𝑦3 − 𝑦4, �̇�3, ̇𝑦3 − ̇𝑦4) − 𝑚3𝑔,
(8)
where 𝐹𝑥, 𝐹𝑦 denote the liner approximations of force com-ponents 𝐹𝑥, 𝐹𝑦. They are obtained via Taylor expansion forforce components on the vicinity of the equilibrium position.Linearizing the nonlinear terms on the static equilibriumposition allows a linear system (8) to be derived. The detailsof this procedure can be found clearly in [22].
The nonlinearity measures quantify the differencesbetween the dynamical responses of the nonlinear system𝑁(𝜔) and linear system 𝐿(𝜔). This can provide informationregarding how well the dynamical behaviors of the nonlin-ear system 𝑁(𝜔) resemble that of the linear model 𝐿(𝜔).According to the definition proposed by Schweickhardt andAllgöwer [24], the following definition is used because alinear system is obtained in advance:
𝜙𝜔𝑁 = sup𝜔
‖𝑁 (𝜔) − 𝐿 (𝜔)‖‖𝑁 (𝜔)‖ , (9)
where𝑁(𝜔) is the nonlinear system, 𝐿(𝜔) is the linear model,and 𝜙𝜔𝑁 denotes the value of the nonlinearity quantificationusing the input𝜔. A constant rotational speed𝜔 is consideredto be the input of (9) in this paper, and a simple definitionof nonlinearity measure is given for engineering applicationswith lower computational requirement:
𝜙𝜔𝑁 = ‖𝑁 (𝜔) − 𝐿 (𝜔)‖‖𝑁 (𝜔)‖ . (10)The value of 𝜙𝜔𝑁 corresponds to the percentwise deviationof the dynamics of linear model L(𝜔) from the dynamics ofnonlinear system𝑁(𝜔). In (9) and (10), ‖(⋅)‖ is the normwiththe following definition:
‖𝑥 (⋅)‖ = √∫∞0|𝑥 (𝑡)|2 𝑑𝑡, (11)
-
Shock and Vibration 5
−2
−1.5
−1
−0.5
00.5
11.5
22.5
Am
plitu
de
150 200 250 300 350 400 500 600100 450 550Time (ms)
(a) Vibration amplitudes
×104
0
1
2
3
4
5
6
7
8
Am
plitu
de
250100 150 200 3000 50Frequency (Hz)
(b) Vibration spectrums
Figure 3: The horizontal direction response of the disk (𝜆 = 0.1, 𝛿 = 0.00002m).where 𝑥(𝑡) denotes the nonlinear response signals thatdescribe the dynamics of the systems. In principle, any normcan be used for the following considerations. In order to stressthat fact (and for readability purposes), wewill denote a normusing ‖(⋅)‖, without explicitly specifying which norm is used.
The result of the nonlinearity evaluation 𝜙𝜔𝑁 will satisfy𝜙𝜔𝑁 ≥ 0. It is quite challenging to discuss the high-dimensional system (3) and (8) in an analytical way. There-fore, the calculations of nonlinearity measure resorted tonumerical methods, where the fourth order Runge-Kuttamethod is used to integrate the dynamic systems. The sameprocedure of nondimensionalization in [22] is used to trans-form the systems into new ones, while a smaller marchingstep is chosen to ensure a stable solution and to avoid thenumerical divergence at the point where the damping andstiffness parameters are discontinuous.
4. The Influence of Disk Mass Varying onValues of Nonlinearity Measure
The influence of disk mass varying on values of nonlinear-ity measures are discussed in this section. The amplitudecoefficient 𝜆 of mass varying is used as a control parameterto perform a detailed investigation of nonlinear dynamicsof the bearing-rotor system. The influences on dynamicalbehaviors for the amplitude coefficient varying are discussedand compared at the first stage, while the impacts on the trendof nonlinearity evaluation of rotor systems with pedestallooseness will be given at the second stage. The values ofparameters used in simulations and nonlinearity measuresare given in Table 1.
4.1. The Influence of Disk Mass Varying on Dynamical Behav-iors. The amplitude coefficient 𝜆 of mass varying is animportant parameter to have the impact on the dynamicalbehaviors of rotor systems with pedestal looseness. In theprocess of discussions for the influence of mass varying, theamplitude coefficients 𝜆 = 0.1, 𝜆 = 0.3, 𝜆 = 0.5 are usedto simulate the nonlinear system (8). Looseness clearance 𝛿is given different values from 0 to 0.0035m to simulate the
Table 1: Values of simulation parameters.
Parameter Value𝑚0 4 kg𝜀 0.05𝑚1 32.1 kg𝑚3 10 kg𝑐1 1050N⋅s/m𝑐2 2100N⋅s/m𝑘 2.5 × 107N/m𝜔 2100 rpm𝑒 0.5 × 10−4m𝑘𝑏1 7.5 × 109 N/m𝑘𝑏3 7.5 × 107N/m𝜇 0.018 pa∘s𝑐𝑏1 350N⋅s/m𝑐𝑏2 100N⋅s/m𝑐𝑏3 500N⋅s/m𝑅 0.025m𝐿 0.012m𝑐 0.00011mdynamics of the rotor system; the periodic, quasi-periodic,and chaotic behaviors are often observed in the bearing-rotorsystem. Because of the varying disk mass, the bearing-rotorsystemwith looseness clearance 0.00002mbegins to generatethe quasi-periodic behaviors, while that with looseness clear-ance 0.0001m begins to have the chaotic behaviors. Then,the looseness clearances 0.00002m, 0.0001m are chosen toexpress the dynamical behaviors of the rotor systems. Thevibration amplitudes in the positions of disk and pedestallooseness are collected and the amplitude spectrums infrequency domain are also given in Figures 3–14.
When the looseness clearances 𝛿 = 0.00002m, Figures3–5 display the vibration amplitudes and its spectrums atthe position of the disk with varying amplitude coefficients,respectively. Similarly, they are given in Figures 6–8 for
-
6 Shock and Vibration
−2
−1.5
−1
−0.5
00.5
11.5
22.5
Am
plitu
de
150 200 250 300 350 400 500 600100 450 550Time (ms)
(a) Vibration amplitudes
×104
0123456789
Am
plitu
de
250100 150 200 3000 50Frequency (Hz)
(b) Vibration spectrums
Figure 4: The horizontal direction response of the disk (𝜆 = 0.3, 𝛿 = 0.00002m).
150 200 250 300 350 400 500 600100 450 550Time (ms)
−2
−1.5
−1
−0.5
00.5
11.5
22.5
Am
plitu
de
(a) Vibration amplitudes
×104
0
2
4
6
8
10
12
Am
plitu
de
250100 150 200 3000 50Frequency (Hz)
(b) Vibration spectrums
Figure 5: The horizontal direction response of the disk (𝜆 = 0.5, 𝛿 = 0.00002m).
−3
−2
−1
0
1
2
3
Am
plitu
de
150 200 250 300 350 400 500 600100 450 550Time (ms)
(a) Vibration amplitudes
×104
0
1
2
3
4
5
6
Am
plitu
de
250100 150 200 3000 50Frequency (Hz)
(b) Vibration spectrums
Figure 6: The horizontal direction response of the disk (𝜆 = 0.1, 𝛿 = 0.0001m).
-
Shock and Vibration 7
−2.5
−2
−1.5
−1
−0.5
00.5
11.5
22.5
Am
plitu
de
150 200 250 300 350 400 500 600100 450 550Time (ms)
(a) Vibration amplitudes
×104
250100 150 200 3000 50Frequency (Hz)
0
1
2
3
4
5
6
7
Am
plitu
de
(b) Vibration spectrums
Figure 7: The horizontal direction response of the disk (𝜆 = 0.3, 𝛿 = 0.0001m).
−2.5
−2
−1.5
−1
−0.5
00.5
11.5
22.5
Am
plitu
de
150 200 250 300 350 400 500 600100 450 550Time (ms)
(a) Vibration amplitudes
×104
0
1
2
3
4
5
6
7A
mpl
itude
250100 150 200 3000 50Frequency (Hz)
(b) Vibration spectrums
Figure 8: The horizontal direction response of the disk (𝜆 = 0.5, 𝛿 = 0.0001m).
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Am
plitu
de
150 200 250 300 350 400 500 600100 450 550Time (ms)
(a) Vibration amplitudes
×104
0
0.5
1
1.5
2
Am
plitu
de
250100 150 200 3000 50Frequency (Hz)
(b) Vibration spectrums
Figure 9: The horizontal direction response of the position of pedestal looseness (𝜆 = 0.1, 𝛿 = 0.00002m).
-
8 Shock and Vibration
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Am
plitu
de
150 200 250 300 350 400 500 600100 450 550Time (ms)
(a) Vibration amplitudes
×104
0
0.5
1
1.5
2
Am
plitu
de
250100 150 200 3000 50Frequency (Hz)
(b) Vibration spectrums
Figure 10: The horizontal direction response of the position of pedestal looseness (𝜆 = 0.3, 𝛿 = 0.00002m).
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Am
plitu
de
150 200 250 300 350 400 500 600100 450 550Time (ms)
(a) Vibration amplitudes
×104
0
0.5
1
1.5
2
2.5
3
Am
plitu
de
250100 150 200 3000 50Frequency (Hz)
(b) Vibration spectrums
Figure 11: The horizontal direction response of the position of pedestal looseness (𝜆 = 0.5, 𝛿 = 0.00002m).
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Am
plitu
de
150 200 250 300 350 400 500 600100 450 550Time (ms)
(a) Vibration amplitudes
×104
0
0.5
1
1.5
2
Am
plitu
de
250100 150 200 3000 50Frequency (Hz)
(b) Vibration spectrums
Figure 12: The horizontal direction response of the position of pedestal looseness (𝜆 = 0.1, 𝛿 = 0.0001m).
-
Shock and Vibration 9
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1A
mpl
itude
150 200 250 300 350 400 500 600100 450 550Time (ms)
(a) Vibration amplitudes
×104
0
0.5
1
1.5
2
Am
plitu
de
250100 150 200 3000 50Frequency (Hz)
(b) Vibration spectrums
Figure 13: The horizontal direction response of the position of pedestal looseness (𝜆 = 0.3, 𝛿 = 0.0001m).
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Am
plitu
de
150 200 250 300 350 400 500 600100 450 550Time (ms)
(a) Vibration amplitudes
×104
0
0.5
1
1.5
2A
mpl
itude
250100 150 200 3000 50Frequency (Hz)
(b) Vibration spectrums
Figure 14: The horizontal direction response of the position of pedestal looseness (𝜆 = 0.5, 𝛿 = 0.0001m).the rotor system with 𝛿 = 0.0001m. For the positionof the pedestal looseness, the vibration amplitudes and itsspectrums with different amplitude coefficients are givenin Figures 9–14 with looseness clearances 𝛿 = 0.00002mand 𝛿 = 0.0001m, respectively. The results of vibrationanalysis of the systemwith slowly diskmass varying show thattheir behaviors represent a perturbation of the system withconstant disk mass. It can be seen that amplitude coefficientschanging has significant impacts on the vibration propertiesof rotor systems.
As can be seen from (1), 𝑚0 denotes the average mass ofthe disk, and 𝜆 denotes the change coefficient of disk massnear the average value𝑚0 in the varying time.A large𝜆meansa relative large range of the change of disk mass, and viceversa. With a constant unbalance of the disk, larger change ofdisk mass will give more significant impacts on the dynamicsof rotor systems with pedestal looseness, which are shown inFigures 3–14. It can also be found that when a larger loosenessclearance is chosen in numerical experiments, vibrationsignals have more nonlinear characteristics in its amplitudes
and spectrums (more frequency components are generated).In detail, Figures 3–8 show that the main frequencies ofthe vibration signals in the position of disk have largeramplitudes with the increasing of 𝜆 and the fixed loosenessclearance. On the other hand, the vibration signals in theposition of pedestal have more apparent shock effect (Figures9–14). Similarly, it can be concluded that more complexfrequency components are generated in the vibration signalsin the position of pedestal with an increasing 𝜆 and thefixed looseness clearance. In conclusion, large coefficient ofslowly disk mass varying will lead to more influences onthe severity of dynamics nonlinearity of rotor systems withpedestal looseness.
4.2. The Effect of Disk Mass Varying on Nonlinearity Measure
(1) 𝜆= 0,𝑚0 = 4 kg, 10 kg, 30 kg, 50 kg.With a given amplitudecoefficient 0, the looseness clearances from 0 to 0.0035m areused to simulate the dynamical behaviors of rotor systemswith a given disk mass. A series of values of nonlinearity
-
10 Shock and VibrationN
onlin
earit
y m
easu
res
0.5 1 1.5 2 2.5 3 3.50Looseness clearance (m)
1.05
1.1
1.15
1.2
1.25
×10−3
m2 = 4 EA
m2 = 10 EA
m2 = 30 EA
m2 = 50 EA
Figure 15: Curves of nonlinearity measure and looseness clearanceswith different disk mass.
measure are obtained and linked to be a curve for every givendisk mass. Here, four different disk mass values are chosen toobtain four curves of nonlinearity measure, which are shownin Figure 15.
As can be seen from Figure 15, four curves are alldescribed by exponential function with different fitting coef-ficients. It can be observed that the values of nonlinearitymeasure for the rotor system with pedestal looseness willhave a decreasing trend, when the looseness clearances aresmaller than 0.001m. In the interval [0, 0.003m], the valuesof nonlinearity measure are growing steadily. If the looseclearance is larger than 0.003m, the nonlinearity degree willsharply grow. Particularly, the rotor system with larger diskmass will havemore apparent decreasing than that with smalldisk mass, when the looseness clearance is increasing inthe interval [0, 0.001m]. It can be explained that, with theincreasing of the disk mass, the unbalance of the larger diskmay have serious influences on the bearing clearance andforce components of the oil film in the bearing.
(2) 𝑚0 = 4 kg, 𝜆 = 0.1, 0.3, 0.5. With a given average mass ofthe disk, looseness clearances from 0 to 0.0035m are usedto simulate the dynamical behaviors of rotor systems, anda series of values of nonlinearity measure are obtained andlinked to be a curve for a chosen amplitude coefficient. Threevalues are used to be amplitude coefficients and obtain threecurves of nonlinearity measure, which is shown in Figure 16.
As can be seen from Figure 16, these three curves are alldescribed by exponential function with different amplitudecoefficients of disk mass varying. Quasi-periodic behaviorsare often observed in the rotor systems with small loosenessclearances. Because𝑚0 is small, the varying of disk mass hasless impacts on dynamical behaviors of the rotor system withsmall looseness clearances. It can be found that the threecurves are close in the interval [0, 0.0005m] of loosenessclearances. When the looseness clearances are increasing,the severity of nonlinearity for dynamics is influenced bythe nonlinear elastic force and the varying of disk mass.The chaotic behaviors will emerge primarily in the dynamics
Non
linea
rity
mea
sure
s
1.1
1.15
1.2
1.25
1.3
0.5 1 1.5 2 2.5 3 3.50Looseness clearance (m) ×10
−3
= 0.1
= 0.3
= 0.5
Figure 16: Curves of nonlinearity measure and looseness clearanceswith different amplitude coefficient.
of rotor system for large values of amplitude coefficient ofdisk mass varying, which will evidently modify the rangeof chaotic behaviors. With a large amplitude coefficient ofdisk mass varying, lateral vibrations of the disk also haveirregularity behaviors; this also lead to a sharply increasingthe assessment values of severity of nonlinearity of dynamics.
5. Conclusions
This paper proposed the investigation of the influence ofdisk mass varying on severity of dynamics nonlinearity vianonlinearitymeasure for bearing-rotor systems with pedestallooseness. A nonlinear mathematical model including theeffect of slowly disk mass varying was developed for abearing-rotor system with pedestal looseness. The varying ofequivalent disk mass is described by a cosine function, andthe amplitude coefficient is used as a control parameter.Then,nonlinearity measure was employed to quantify the severityof dynamics nonlinearity of bearing-rotor systems. With theincreasing of looseness clearances, the curves that denote thetrend of nonlinearity degrees were plotted for each amplitudecoefficient of diskmass varying. Larger amplitude coefficientsof disk mass varying will have more impacts on the severityof dynamics nonlinearity and generation of chaotic behaviorsin rotor systems with pedestal looseness.
Conflicts of Interest
The authors declare that they have no conflicts of interest.
Acknowledgments
This project is supported by the National Natural Sci-ence Foundation of China (Grants nos. 51775182, 51775181,51305133).
References
[1] F. Chu and Y. Tang, “Stability and non-linear responses of arotor-bearing system with pedestal looseness,” Journal of Soundand Vibration, vol. 241, no. 5, pp. 879–893, 2001.
-
Shock and Vibration 11
[2] K. Lu, Y. Jin, Y. Chen, Q. Cao, and Z. Zhang, “Stability analysisof reduced rotor pedestal looseness fault model,” NonlinearDynamics, vol. 82, no. 4, pp. 1611–1622, 2015.
[3] Y. Tao, W. Jiao, L. Ying-jie, S. Wei, and H. Qing-kai, “Nonlineardynamics characteristics of rotor system with slowly-varyingmass based on time-frequency analysis,” Journal of Vibrationand Shock, vol. 33, no. 20, pp. 105–110, 2014 (Chinese).
[4] Y. Tao, L. Ying-jie, S. Wei, and H. Qing-kai, “Time-frequencyfeature analysis of rotor system with damage of single/duralslowly-varyingmass,”Machinery Design&Manufacture, vol. 12,pp. 128–131, 2014 (Chinese).
[5] L. Cveticanin, “Chaos in rotors with slowly varying mass,”Journal of Sound andVibration, vol. 185, no. 5, pp. 897–901, 1995.
[6] L. Cveticanin, “Normal modes of vibration for continuousrotors with slow time variable mass,” Mechanism and MachineTheory, vol. 32, no. 7, pp. 881–891, 1997.
[7] K. Lu, Y. Chen, Z. Li, and Y. Jin, “Application of the transientpod method for order reduction of a rotor system with pedestallooseness,” International Journal of Numerical Methods andApplications, vol. 15, no. 3, pp. 241–260, 2016.
[8] K. Lu, Y. Chen, Y. Jin, and L. Hou, “Application of the transientproper orthogonal decomposition method for order reductionof rotor systems with faults,”Nonlinear Dynamics, vol. 86, no. 3,pp. 1913–1926, 2016.
[9] X. An, D. Jiang, S. Li, and M. Zhao, “Application of the ensem-ble empirical mode decomposition and Hilbert transform topedestal looseness study of direct-drive wind turbine,” Energy,vol. 36, no. 9, pp. 5508–5520, 2011.
[10] H. F. Wang, G. Chen, and P. P. Song, “Asynchronous vibrationresponse characteristics of aero-engine with support loosenessfault,” Journal of Computational & Nonlinear Dynamics, vol. 11,no. 3, Article ID 031013, 2015.
[11] H. F. Wang and G. Chen, “Certain type turbofan enginewhole vibration model with support looseness fault and casingresponse characteristics,” Shock and Vibration, vol. 2014, ArticleID 683469, 23 pages, 2014.
[12] Y. S. Choi and S.M. Park, “Diagnosis on the clearance of rotatingmachinery using correlation dimension,” Transactions of theKorean Society for Noise and Vibration Engineering, vol. 15, no.7, pp. 134–139, 2004.
[13] X. An and F. Zhang, “Pedestal looseness fault diagnosis in arotating machine based on variational mode decomposition,”Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, vol. 231, no. 13, 2017.
[14] R. Chen, Z. Mu, L. Yang, X. Xu, and X. Zhang, “Pedestal loose-ness extent recognition method for rotating machinery basedon vibration sensitive time-frequency feature and manifoldlearning,” Journal of Vibroengineering, vol. 18, no. 8, pp. 5174–5191, 2016.
[15] R. Chen, S. Chen, L. Yang, J. Wang, X. Xu, and T. Luo,“Looseness diagnosis method for connecting bolt of fan foun-dation based on sensitive mixed-domain features of excitation-response and manifold learning,” Neurocomputing, vol. 219, pp.376–388, 2017.
[16] P. Goldman and A. Muszynska, “Analytical and experimentalsimulation of loose pedestal dynamic effects on a rotatingmachine vibrational response,” in RotatingMachinery and Vehi-cle Dynamics, vol. 35, pp. 11–17, American Society ofMechanicalEngineers, 1991.
[17] A. Muszynska and P. Goldman, “Chaotic responses of unbal-anced rotor/bearing/stator systems with looseness or rubs,”Chaos, Solitons & Fractals, vol. 5, no. 9, pp. 1683–1704, 1995.
[18] Z. Ji and J. W. Zu, “Method of multiple scales for vibrationanalysis of rotor-shaft systems with non-linear bearing pedestalmodel,” Journal of Sound and Vibration, vol. 218, no. 2, pp. 293–305, 1998.
[19] H. Ma, X. Zhao, Y. Teng, and B. Wen, “Analysis of dynamiccharacteristics for a rotor systemwith pedestal looseness,” Shock& Vibration, vol. 18, no. 1-2, pp. 13–27, 2011.
[20] H. Ma, J. Huang, S. Zhang, and H. Niu, “Nonlinear vibrationcharacteristics of a rotor system with pedestal looseness faultunder different loading conditions,” Journal of Vibroengineering,vol. 15, no. 1, pp. 406–418, 2013.
[21] Z. H. Ren, T. Yu, H.Ma, and B. C.Wen, “Pedestal looseness faultanalysis of overhanging dual-disc rotor-bearing,” in Proceedingof 12th IFToMMWorld Congress, 2007.
[22] M. Jiang, J. Wu, X. Peng, and X. Li, “Nonlinearity measurebased assessment method for pedestal looseness of bearing-rotor systems,” Journal of Sound and Vibration, vol. 411, pp. 232–246, 2017.
[23] Z. Liu, Y. Cui, J. Ye, and Y. Wang, “Research on vibrationcharacteristics of gear system with nonlinear oil film force andmesh force,” in Proc. CSEE 29, vol. 23, pp. 84–91, 2009 (Chinese).
[24] T. Schweickhardt and F. Allgöwer, “Chapter A3 Quantitativenonlinearity assessment-An introduction to nonlinearity mea-sures,” Computer Aided Chemical Engineering, vol. 17, no. C, pp.76–95, 2004.
-
International Journal of
AerospaceEngineeringHindawiwww.hindawi.com Volume 2018
RoboticsJournal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Shock and Vibration
Hindawiwww.hindawi.com Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwww.hindawi.com
Volume 2018
Hindawi Publishing Corporation http://www.hindawi.com Volume 2013Hindawiwww.hindawi.com
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwww.hindawi.com Volume 2018
International Journal of
RotatingMachinery
Hindawiwww.hindawi.com Volume 2018
Modelling &Simulationin EngineeringHindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Navigation and Observation
International Journal of
Hindawi
www.hindawi.com Volume 2018
Advances in
Multimedia
Submit your manuscripts atwww.hindawi.com
https://www.hindawi.com/journals/ijae/https://www.hindawi.com/journals/jr/https://www.hindawi.com/journals/apec/https://www.hindawi.com/journals/vlsi/https://www.hindawi.com/journals/sv/https://www.hindawi.com/journals/ace/https://www.hindawi.com/journals/aav/https://www.hindawi.com/journals/jece/https://www.hindawi.com/journals/aoe/https://www.hindawi.com/journals/tswj/https://www.hindawi.com/journals/jcse/https://www.hindawi.com/journals/je/https://www.hindawi.com/journals/js/https://www.hindawi.com/journals/ijrm/https://www.hindawi.com/journals/mse/https://www.hindawi.com/journals/ijce/https://www.hindawi.com/journals/ijap/https://www.hindawi.com/journals/ijno/https://www.hindawi.com/journals/am/https://www.hindawi.com/https://www.hindawi.com/













![An Intense Urge Micturition Model for a slowly varying ... · Micturition is the process by which urine is expelled from the body. [5] described investigations into micturition as](https://static.fdocuments.in/doc/165x107/5f7cca40d22ca752c37f3a7a/an-intense-urge-micturition-model-for-a-slowly-varying-micturition-is-the-process.jpg)