The Gravitational Ellipse
10
The gravitational ellipse Maurizio M. D’Eliseo a Osservatorio S. Elmo, Via A. Caccavello 22, 80129 Napoli, Italy Received 27 July 2008; accepted 12 January 2009; published online 19 February 2009 The elliptical orbit of the classical gravitational two-body problem can be deter- mined by studying the free oscillations about a circular motion or the small motions around a fixed point in a rotating reference frame. In this last schematization we approximate the differential equation of motion by a succession of simple equations we solve iteratively, obtaining a piecemeal determination of the position vector r formally expressed in terms of Laurent polynomials, from which we quickly de- duce the explicit time-dependent expressions in the form of complex trigonometric polynomials. This approach can also be used in the presence of perturbing forces and, by way of illustration, we study the effects of a small linear repulsive force on the elliptical orbit. © 2009 American Institute of Physics. DOI: 10.1063/1.3078419 I. INTRODUCTION In the classical gravitational two-body problem we can easily derive from Newton’s equation of motion, by means of the area and Laplace integrals, the elliptical shape of the orbit in function of the polar angle . 1,2 In the practical applications we look at the position of the orbiting body in function of time, but the time dependence of this variable cannot be expressed by closed-form functions. One way out is to obtain, starting from the area integral, by means of repeated approxi- mate integrations, the function t in the form of a cosine series whose coefficients are, in turn, power series in the eccentricity. Then, following the route t → t → r, we can at last find the position vector r for any time to arbitrary accuracy. An alternate approach, which we will follow in this paper, is to obtain the series development of rt by a direct integration of the equation of motion, opportunely modified with a transformation of the force term. Central to our analysis is the framework of complex variables because of the following. • From the form of the sought solution, we are led to consider a uniformly rotating reference frame in the plane of motion, and we can formally represent the gravitational force as a sum of homogeneous polynomials in two complex conjugate variables. • We can substitute the two scalar equations of this dynamical system with two degrees of freedom, by a single complex equation, containing on the left-hand side a linear differential operator with constant coefficients, and on the right-hand side nonlinear source terms having small parameters, namely the powers of the eccentricity, as factors. Such a form allows the application of the method of iteration, and the path rt is then determined solving a succes- sion of elementary linear equations by a well defined procedure. • Knowing rt, expressed in complex form, to as high a degree of precision as we wish, we can easily deduce, by routine methods of complex algebra and calculus, the related time developments of distances, angles, and of all other orbital functions that are of interest in astrodynamics. • We may employ a simple notation for the complex exponential, which will ease all compu- tations, either done by hand or by computer. a Electronic mail: [email protected]. JOURNAL OF MATHEMATICAL PHYSICS 50, 022901 2009 50, 022901-1 0022-2488/2009/502/022901/10/$25.00 © 2009 American Institute of Physics Downloaded 26 Feb 2009 to 192.135.20.186. Redistribution subject to AIP license or copyright; see http://jmp.aip.org/jmp/copyright.jsp
description
The elliptical orbit of the classical gravitational two-body problem can be determinedby studying the free oscillations about a circular motion or the small motionsaround a fixed point in a rotating reference frame. In this last schematization weapproximate the differential equation of motion by a succession of simple equationswe solve iteratively, obtaining a piecemeal determination of the position vector rformally expressed in terms of Laurent polynomials, from which we quickly deducethe explicit time-dependent expressions in the form of complex trigonometricpolynomials. This approach can also be used in the presence of perturbing forcesand, by way of illustration, we study the effects of a small linear repulsive force onthe elliptical orbit.
Transcript of The Gravitational Ellipse

The gravitational ellipseMaurizio M. D’Eliseoa�
Osservatorio S. Elmo, Via A. Caccavello 22, 80129 Napoli, Italy
�Received 27 July 2008; accepted 12 January 2009; published online 19 February 2009�
The elliptical orbit of the classical gravitational two-body problem can be deter-mined by studying the free oscillations about a circular motion or the small motionsaround a fixed point in a rotating reference frame. In this last schematization weapproximate the differential equation of motion by a succession of simple equationswe solve iteratively, obtaining a piecemeal determination of the position vector rformally expressed in terms of Laurent polynomials, from which we quickly de-duce the explicit time-dependent expressions in the form of complex trigonometricpolynomials. This approach can also be used in the presence of perturbing forcesand, by way of illustration, we study the effects of a small linear repulsive force onthe elliptical orbit. © 2009 American Institute of Physics.�DOI: 10.1063/1.3078419�
I. INTRODUCTION
In the classical gravitational two-body problem we can easily derive from Newton’s equationof motion, by means of the area and Laplace integrals, the elliptical shape of the orbit in functionof the polar angle �.1,2 In the practical applications we look at the position of the orbiting body infunction of time, but the time dependence of this variable cannot be expressed by closed-formfunctions. One way out is to obtain, starting from the area integral, by means of repeated approxi-mate integrations, the function ��t� in the form of a cosine series whose coefficients are, in turn,power series in the eccentricity. Then, following the route t→��t�→r���, we can at last find theposition vector r for any time to arbitrary accuracy. An alternate approach, which we will followin this paper, is to obtain the series development of r�t� by a direct integration of the equation ofmotion, opportunely modified with a transformation of the force term. Central to our analysis isthe framework of complex variables because of the following.
• From the form of the sought solution, we are led to consider a uniformly rotating referenceframe in the plane of motion, and we can formally represent the gravitational force as a sumof homogeneous polynomials in two complex conjugate variables.
• We can substitute the two scalar equations of this dynamical system with two degrees offreedom, by a single complex equation, containing on the left-hand side a linear differentialoperator with constant coefficients, and on the right-hand side nonlinear source terms havingsmall parameters, namely the powers of the eccentricity, as factors. Such a form allows theapplication of the method of iteration, and the path r�t� is then determined solving a succes-sion of elementary linear equations by a well defined procedure.
• Knowing r�t�, expressed in complex form, to as high a degree of precision as we wish, wecan easily deduce, by routine methods of complex algebra and calculus, the related timedevelopments of distances, angles, and of all other orbital functions that are of interest inastrodynamics.
• We may employ a simple notation for the complex exponential, which will ease all compu-tations, either done by hand or by computer.
a�Electronic mail: [email protected].
JOURNAL OF MATHEMATICAL PHYSICS 50, 022901 �2009�
50, 022901-10022-2488/2009/50�2�/022901/10/$25.00 © 2009 American Institute of Physics
Downloaded 26 Feb 2009 to 192.135.20.186. Redistribution subject to AIP license or copyright; see http://jmp.aip.org/jmp/copyright.jsp

II. THE EQUATION OF MOTION
Given the two point masses �A ,mA� and �B ,mB� interacting gravitationally, the equation ofmotion of B in an A-centered reference system in the orbital plane is1,2
r = − �r−3r , �1�
where r=x+ iy=rei� is the complex coordinate of B, r2= �r�2=rr�, �=G�mA+mB�, G is the gravi-tational constant. This equation admits the circular solution r=aeint of angular frequency n=��a−3 and satisfying the initial condition r�0�=a. In order to find the general periodical solutionof �1� after a transformation of the awkward r−3 term, we first put the equation into a moreconvenient form by replacing the independent variable time t with the scaled imaginary time �� int. Accordingly, denoting by a prime � the differentiation with respect to �, Eq. �1� turns into
r� = a3r−3r . �2�
It is helpful to write the circular solution in the form r=a�, where ��e�=eint=cos nt+ i sin nt.For any integer k the conjugate of �k satisfies the identity ��k����−k, while the derivative of orderj amounts to a multiplication by kj, so we can regard the differentiation sign � acting on integerpowers of � as the logarithmic derivative d /d ln � or the Euler operator D�� ·d /d�. This notationhides the presence, in the formulas, of both the time and the imaginary unit, and we can work withsimple algebraic objects, the Laurent polynomials in � on the unit circle ���=1, which exploit theidentity between conjugate and reciprocal of the complex exponential. After computing the poly-nomials that are solutions of our problem we will replace � by eint. We study now the near-circularsolutions of �2� by assuming r=a�1+s��, where s=s��� is a complex function3 whose range is theopen unit disk d�0;1�. We take s complex in order to allow for motions along arbitrary directionsin the plane. Note that being s the composite function s�����t���, since �=1 when t=0, the initialvalue of s will be s�1�. Insertion of the assumed expression of r into �2� and cancellation of thecommon factor a� yield
D2s + 2Ds + s + 1 = �1 + s�−1/2�1 + s��−3/2. �3�
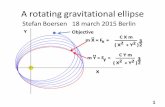
This equation describes the small motions of B around the point lying on the rotating radius vectorof the circular orbit scaled at unit distance to the origin. Besides, in �3�, from left to right there areterms corresponding to the forces acting: inertial, Coriolis, centrifugal, and gravitational. All thishighlights that, from a physical point of view, the equation is related to a frame x�y� uniformlyrotating with angular velocity n �see Fig. 1�.
In this reference system the circular solution is s=0. It is interesting to notice that the rotatingsystem naturally stems from our treatment of the near-circular motion in the framework of com-plex variables. Knowing s, the resulting motion in the nonrotating inertial frame is found bycomputing r=a�1+s��, from which we can immediately write out the position vector r�t�=aeint
+as�t�eint.
a sr
x
y
x’y ’
a
n tA
B
FIG. 1. Geometry of motion.
022901-2 Maurizio M. D’Eliseo J. Math. Phys. 50, 022901 �2009�
Downloaded 26 Feb 2009 to 192.135.20.186. Redistribution subject to AIP license or copyright; see http://jmp.aip.org/jmp/copyright.jsp

We get rid of the irrational factors in the right-hand side of �3� by developing them, in turn, informal power series in s and s�, performing their Cauchy product, and writing on the left-hand sidethe two resulting linear terms,
�4�
It is desirable to have an equation for s only because, knowing s, we also know its conjugate s�.This can be done by the formal device of introducing the star � conjugation operator, with theproperty that �X=X�, where X is any complex expression. Then, by defining the linear differentialoperator
L � D2 + 2D + 32 + 3
2 � , �5�
we cast �4� in the form
Ls = S . �6�
The nonlinear source function S=S�s ,s��, as shown in �4�, can be regarded as an infinite sum ofhomogeneous polynomials in s ,s� of increasing degree, which in practice we truncate somewhere,so that �6� will have the form
Ls = SK � ��=2
K
S��� � ��=2
K
�j=0
�
��−j,js�−js�j , �7�
where the coefficients ��−j,j are rational numbers that can be expressed by means of double and/orsimple factorials,
��−j,j = �− 1�� �2�� − j� − 1� ! ! �2j + 1� ! !
2��� − j� ! j!= �− 1�� �2�� − j�� ! �2j + 1�!
�2��� − j� ! j!�2 . �8�
We recall that the double factorial j ! ! is recursively defined: j ! ! =1, if j=−1,0 ,1; j ! ! = j�j−2� ! !, if j�2, while �2j−1� ! ! = �2j� ! /2 j j ! , �2j+1� ! ! = �2j+1� ! /2 j j!. In �7�, the homogeneouspolynomial S��� represents the block gathering the �+1 terms of the source of the same degree �,while the upper index K corresponds to the overall approximation degree, which we fix in ad-vance.
III. THE MAKING OF THE ELLIPSE
The integration of Eq. �7� can be effected by means of a straightforward iterative scheme,which can be described as consisting in the construction and in the solution of a sequence ofequations ever more approximating the equation of motion �6�. If Sj stands for S�sj ,sj
��, we put
Ls1 = 0, �9�
Lsj = Sj−1j , j = 2, . . . ,K . �10�
At each step we build a particular right-hand source, and because of the nature of the formersolutions, the corresponding equation becomes a linear differential equation whose solution is thesum of the general integral s1 of the homogeneous equation �9� and of the particular integrals dueto the presence of the source terms.
In practice, by the linearity of Eq. �10�, we can decouple them, and to find sj we will identifyevery time in both sides only the terms of the same order �in the eccentricity, as we will shortlysee�. This can be easily done for high j’s by computer taking the difference of the power series
022901-3 The gravitational ellipse J. Math. Phys. 50, 022901 �2009�
Downloaded 26 Feb 2009 to 192.135.20.186. Redistribution subject to AIP license or copyright; see http://jmp.aip.org/jmp/copyright.jsp

developments in the eccentricity of the source function to the orders j and j−1, respectively. Therationale is that the solutions concerning the terms of order less than j have supposedly alreadybeen found, while those related to the terms of order higher than j would be incomplete becauseof the intrinsic nature of the approximation process and the formal structure of the source terms.Therefore it suffices to look for the particular integral of the equation relative to the unknownfunction s�j��sj −sj−1, of order j in the eccentricity, and to substitute �10� with the reducedscheme,
Ls�j� = �Sj−1j �, j = 2, . . . ,K , �11�
where we agree that the square brackets enclose all and only the terms of order j of the forcingfunction.
Let us start from �9� and, in full generality, assume as solution the binomial s1=a�k+b�−k,where the positive integer k and the complex constants a ,b have to be determined.
After developing the expression L�a�k+b�−k�, equating separately to zero the resulting coef-ficients of �k ,�−k, and taking the conjugate of the second equation, we shall obtain a homogeneouslinear system in the unknowns a ,b�, which may be written as the matrix equation
k2 + 2k + 3/2 3/23/2 k2 − 2k + 3/2 · a
b� = 0
0 , �12�
which becomes singular, admitting so nontrivial infinitely many solutions, provided k=1, since itsdeterminant is k4−k2,4 and accordingly fixing to n the frequency of the homogeneous solution. Itfollows the relation 3a=−b� from which, if we let a= �1 /2�e�, we obtain b=−�3 /2�e. In hindsight,we select e=eei�, the eccentricity vector, where 0e1 is the �scalar� eccentricity and � is theargument of pericenter.1,2 Then the solution of �9� is
s1 = 12e�� − 3
2e�−1, �13�
while in the inertial frame
r1 = a�1 + s1�� = − 32ae + a� + 1
2ae��2 = − 32ae + aeint + 1
2ae�e2 int. �14�
We may verify at once that �14� agrees with the expression, in function of time, of the ellipticalorbit to order e obtained with the usual methods in complex form.1,2 Starting from r=aei��1−e2� / �1+e cos��−��� and from the area integral �=��a�1−e2�=na2��1−e2�, we have, to ordere,
r = rei� � a�1 − Re�e�ei���ei� = − 12ae + aei� − 1
2ae�e2i�, �15�
� =�
r2 �na2
r2 � n + 2en cos�� − �� , �16�
� � nt + 2e sin�nt − �� = nt − i�e�eint − ee−int� . �17�
From �17� it is easily seen that for a first-order accuracy we can assume
ei� � − e + eint + e�e2 int, e2i� � e2 int, �18�
and, after substituting the exponentials of �18� in �15�, the expression �14� of r1 is retrieved.Before go on, we illustrate the key points of the procedure to be followed.
• To simplify the computations, in s1 we will put e ,e�=e ��=0�, so that, when t=0, we shallhave s1�1�=−e, and B will be at pericenter on the real axis, since r1�0�=a�1−e�. Analo-gously, when t= /n, �=−1, s1�−1�=e, r1� /n�=a�1+e�, and B will be at apocenter. Thischoice of the initial conditions for s1 shall reverberate on the successive solutions s�j� , j�1,
022901-4 Maurizio M. D’Eliseo J. Math. Phys. 50, 022901 �2009�
Downloaded 26 Feb 2009 to 192.135.20.186. Redistribution subject to AIP license or copyright; see http://jmp.aip.org/jmp/copyright.jsp

and the consequent conditions s�j���1�=0 will be automatically satisfied for all even j�2,while, in order to assure the validity of the same conditions for the odd-j solutions, it will berequired we fix, in them, to zero the value of the coefficients of �−1. We will restore the fullform of the vectors e ,e� at the end since, given the initial couplings e�−1↔e�−1 , e��↔e�,in the results we shall find terms of the form e���� �� ,� having the same parity and ����, which we will translate back as
e��−� → e��−��e��−�, e��� → e��−��e����, �19�
and so we shall recover the phase factors ei��, e−i��, characterizing a generic pericenterposition, whence an arbitrary orientation of the orbit in the plane. This operation should beeffected on sK before returning to the inertial frame.
• Doing the iterations outlined in �11�, we shall encounter equations of the form
Ls�j� = �i
�pi�i + qi�
−i�, i = j, j − 2, . . . , i � 0, �20�
where 2 j K and i runs through non-negative integers with the same parity of j. Thecoefficients pi ,qi are rational monomials in ej, and it happens that always p1 is a multiple ofq1, and precisely of the form p1=3q1. It is worth noting that in �20� the forcing function for�=1 verifies the identity �i�pi+qi�= �j+1�ej. We have here a manifestation of the inverse-square force at work: when �=1, at pericenter, it follows that a2r−2= �1−e�−2=� j�j+1�ej. Ananalogous relation with alternating signs is found for �=−1 at apocenter. This enables one todo intermediate checks during the computations. To solve the Eq. �20�, we will apply themethod of undetermined coefficients,4 by assuming as solution the sum of a function of thesame type of the known source and of all its independent derivatives, so that it suffices todeal with the following three types of equations:
La0 = p0, �21�
L�a1� + b1�−1� = p1� + q1�−1, p1 = 3q1, �22�
L�ak�k + bk�
−k� = pk�k + qk�
−k, k � 1, �23�
where the constants a’s and b’s have to be found. From �21� we immediately find
3a0 = p0 → a0 = 13 p0. �24�
In order to satisfy �22�, because of the relation existing between the coefficients of the sourcefunction, either a1 or b1 may be chosen arbitrarily, but the two constants must satisfy therelation 3a1+b1=2q1. We try b1=0, as to have
L�a1�� = 3q1� + q1�−1 ⇒ 3a1 = 2q1 ⇒ a1 = 23q1. �25�
It turns out that this choice ensures the fulfillment of the initial conditions sj��1�=0 for allodd j�3. Last, we consider �23�. From �12�, with a=ak ,b�=bk, it follows that the realcoefficients ak ,bk , pk ,qk satisfy to the matrix equation
k2 + 2k + 3/2 3/23/2 k2 − 2k + 3/2 · ak
bk = pk
qk ,
which we can write in abridged form
022901-5 The gravitational ellipse J. Math. Phys. 50, 022901 �2009�
Downloaded 26 Feb 2009 to 192.135.20.186. Redistribution subject to AIP license or copyright; see http://jmp.aip.org/jmp/copyright.jsp

Lk · �ak,bk�T = �pk,qk�T, �26�
where the transposition symbol T transforms a row vector into a column vector. Sincedet�Lk��0, the solution is found multiplying on the left both sides of �26� by the inversematrix Lk
−1, so we have
�ak,bk�T = Lk−1�pk,qk�T, �27�
and it follows that the coefficients ak ,bk are given by
ak =2�k2 − 2k�pk + 3�pk − qk�
2�k4 − k2�, bk =
2�k2 + 2k�qk − 3�pk − qk�2�k4 − k2�
. �28�
• At the end of the computations, we shall obtain sK, the sum of the partial solutions ofincreasing orders, expressed as a Laurent polynomial, which will satisfy the pericenter/apocenter conditions, in the form
sK = s1 + �j=2
K
s�j� = �i=−K
+K
fi�i, sK��1� = � e , �29�
where the coefficients f i are, in turn, rational polynomials in e, either odd or even accordingto the parity of i.
In conclusion, the solution sK of �7� is of order eK, has in the real time the overall period T=2 /n, and in the inertial frame the vector rK=a�1+sK��, likewise algebraically expressed as aLaurent polynomial in �, will have the same period.
Working through the scheme �11� up to order e3 we successively get the equations
Ls�2� = − 32e2 + 15
4 e2�2 + 34e2�−2,
Ls�3� = − 2716e3� − 9
16e3�−1 + 8916e3�3 + 11
16e3�−3.
Following the rules just described, we find
s3 = s1 + s�2� + s�3� = 12e� − 3
2e�−1 − 12e2 + 3
8e2�2 + 18e2�−2 − 3
8e3� + 13e3�3 + 1
24e3�−3. �30�
As last step, after applying the translation keys �19�, we compute r3=a�1+s3��, and, turning backto the exponential notation, we get the complex trigonometric polynomial
r3
a= −
3
2e + 1 −
1
2e2eint +
1
8e2e−int + 1
2e� −
3
8e2e�e2 int +
1
24e3e−2 int +
3
8e�2e3 int +
1
3e�3e4 int.
�31�
Whatever the value of K, we can verify that the orbit described by rK is the approximate expres-sion of an ellipse. Let us recall the ellipse’s standard definition: it is a locus of points in a planesuch that the sum of the distances to two fixed points �the foci� is a constant �given by twice thesemimajor axis a�. In our case, the first focus is located in the origin, where body A rests, while thesecond and empty focus resides in the point −2ae, and we can verify that the sum of the two focaldistances, to order eK, is �rK�+ �rK+2ae�=2a, as it should be for a true ellipse. Also, if �K is theclosed path described by rK in one period, complex analysis5 tells us that the enclosed area isAK= �1 /2i���K
rK� drK, and we actually find
022901-6 Maurizio M. D’Eliseo J. Math. Phys. 50, 022901 �2009�
Downloaded 26 Feb 2009 to 192.135.20.186. Redistribution subject to AIP license or copyright; see http://jmp.aip.org/jmp/copyright.jsp

AK =1
2i
0
T
rK� �t�rK�t�dt = a21 −
1
2e2 −
1
8e4 − ¯ , �32�
which agrees with the ellipse area ab�a2�1−e2 to the order eK. We have thus compellingreasons to guess and state that the curve described by rK for K→� is an ellipse, even if we had notknown in advance by other means the true nature of the orbit.
The expression of rK�t� is a parametric representation of the ellipse traveled by respecting thearea’s law. From it we can obtain, by means of the usual operations on complex expressions andsome power series developments, all information, to order eK, about the orbiting body, as dis-tances, angles, velocities, expressed in any functional form, in function of time. We get so all theexpansions of the elliptical motion of celestial mechanics.6
As an example, we deduce the expressions of the rectangular and polar coordinates. At oncewe find
x = Re�r� = Re�a�1 + s��� = a cos nt + a Re�s�t�eint� , �33�
y = Im�r� = Im�a�1 + s��� = a sin nt + a Im�s�t�eint� , �34�
besides, since r=rei�=a�1+s�t��eint ,r2=a2�1+s+s�+ss��, from the series developments in s ,s� weget
r � a + a Re�s − 14s2 + 1
4ss� + 18s3 − 1
8s2s� − ¯� , �35�
� = − i ln�ei�� = − i ln�r/r� = − i ln�eint�1 + s�/�1 + s�� � nt + Im�s − 12s2 + 1
3s3 − ¯� . �36�
IV. A LINEAR REPULSIVE FORCE
If the conditions of the problem are slightly modified by the presence of some perturbationterm, the method under consideration can be applied without any alteration. Let a planet P� ofmass m� be moving along the outer circular orbit r�=a�ei���a�ein�t, whose angular frequency n�is incommensurable with that n of planet B, whose orbit lies in the same plane. We will considerthe direct force F of P� acting on a generic fixed point r=rei� of the orbit of the planet B. We havealso an indirect force term due to the influence of P� on B through the perturbation of the centralbody A. This force is ��r� /r�3, but since its average value reduces, by the formulas that shortlyshall follow, to the computation of the integral �0
2ei��d��=0, it does not concern us here. Let now
� = r/a� � 1, � = 1 + �2 − 2� cos �, � = �� − � ,
so that d�=d��. Setting ���Gm� , ���� /a�3, we have
F = ��r� − r
�r� − r�3= �
�a�ei�ei� − r��3/2 . �37�
The average value of F over the period T� of P� can be expressed in the form
�F� =1
T�
0
T�F dt =
1
2A�
0
A�F dA�, �38�
where we have used the area integral and the circumstance that the area’s constant is twice theareal velocity. In this expression we have the quotient of two areas: the area dA� /2=a�2d�� /2 ofthe elementary sector with the vertex in the central body and the total area A�=a�2 of the orbitof P�. If we set
022901-7 The gravitational ellipse J. Math. Phys. 50, 022901 �2009�
Downloaded 26 Feb 2009 to 192.135.20.186. Redistribution subject to AIP license or copyright; see http://jmp.aip.org/jmp/copyright.jsp

d�� ���dA�
2A�=
��a�2d��
2a�2 =��d��
2, �39�
we may write �38� in the form
�F� =� r� − r
�r� − r�3d��, �40�
where the loop integral is taken along the orbit of P� in the direction of motion. We suppose thatthe two orbits do not intersect each other.
This result demonstrates that �F� is equivalent to the force exerted, on the point r, by a thinhomogeneous material wire ring of total mass m�, which can be considered as an ideal material-ization of the circular orbit of P�. The averaging process is meaningful since, by the supposedincommensurability of the two mean motions n ,n�, at any time the two positions r, r� are sto-chastically independent. If the motion of P� is elliptical and noncoplanar to that of B, then r ,r� areordinary vectors, and we shall have, in formula �39�, dA�=r�2d� /2,A�=a�b�=a�2��1−e�2�.The distribution of the mass on the now elliptical ring is no more uniform: the mass of anyelement of the ring is proportional to the time this element is traversed by the perturbing planet.This theorema hoc elegans was the starting point of an important work by Gauss on the secularplanetary perturbations.7 From �38� we now compute the average force acting on the point r, andto do this it must be considered that 1 /T�=n� /2, while, from the area integral for the circular
orbit of P� given by a�2��=n�a�2, it follows that dt=d�� /n�=d� /n�. Then
�F� =1
2
0
2
Fd� =�
2
0
2 r
ra�ei� − r d�
�3/2 ��a�
2
r
r
0
2
�ei� − ���1 + 3� cos � + ¯�d�
=1
2�r + O��2� . �41�
Thus, to order �, an external planet moving on a circular orbit �as well as a circular homogeneousmaterial ring� exerts, approximately, a linear repulsive force, directed away from the center, on aparticle located somewhere near the center �see Fig. 2� and traveling along a coplanar orbit. Toinsert this force in our equation of motion �6�, we substitute, in �41�, r by a�1+s��, divide by−n2a�, and we get, in the rotating frame,
Ls = G�s,s�� � − 12w2 − 1
2w2s + S�s,s�� , �42�
where w��� /n�1. We could integrate this equation iteratively, starting from the circular orbit�s0=0�, but the first and only equation we need to consider here is
a sr
x
y
x’y ’
a
n’ t
r’
n tA
B P ’
FIG. 2. External planet perturbation.
022901-8 Maurizio M. D’Eliseo J. Math. Phys. 50, 022901 �2009�
Downloaded 26 Feb 2009 to 192.135.20.186. Redistribution subject to AIP license or copyright; see http://jmp.aip.org/jmp/copyright.jsp

Ls1 = − 12w2 → s1 = − 1
6w2 �43�
because it is evident that further iterations will produce a succession of constant terms of increas-ing powers of w, leading to negligible additional effects. Equation �43� describes a slight shrinkingof the unperturbed circular orbit of B, as we have r=a�1−w2 /6��. We study now the smallmotions �s about this modified circular orbit, and to do this we consider the variation equationdeduced from �42�,
��Ls − G� = L�s − ��sG�s1�s − ��s�G�s1
�s� = 0, �44�
where we set, to the lowest order in s,
�G
�s
s1
� −1
2w2 −
3
4s1 −
3
4s1
� − ¯ = −3
4w2,
�G
�s�s1
� −3
4s1 −
15
4s1
� + ¯ = −3
4w2.
If we put
L� � D2 + 2D + W + W � , W � 32 + 3
4w2, �45�
Equation �44� may be written in the form
L��s = 0. �46�
We observe that, in the limit w→0, the operator L� goes to L, and Eq. �46� matches the homo-geneous Eq. �9� of the unperturbed motion. Knowing that the solutions of well behaved differen-tial equations depend continuously on the coefficients, we assume the following form of thesolution:
�s =1
2he��c +
�
2he�−c, �47�
where the real constants h, c�1, and ��−3 for w→0. The constant h represents a slight correc-tion to the value of the scalar e, while c implies a uniform motion of the perihelion, since we maywrite
e�−c = e�1−c�−1 = eei��+�1−c�nt��−1 � e+�−1, �48�
and the perihelion advances or recedes according as c�1. Plugging �47� into �46�, we obtain thenonlinear system of equations in c ,�,
c2 + 2c + �1 + ��W = 0, �49�
��c2 − 2c + W� + W = 0, �50�
which can be managed by putting, in �50�, c=1, solving for �
� =W
1 − W� − 3 + 3w2, �51�
and inserting this value of � in �49� so as to obtain in the second approximation,
022901-9 The gravitational ellipse J. Math. Phys. 50, 022901 �2009�
Downloaded 26 Feb 2009 to 192.135.20.186. Redistribution subject to AIP license or copyright; see http://jmp.aip.org/jmp/copyright.jsp

c = − 1 + �1 − �1 + ��W � 1 −3
4w2 = 1 −
3
4
�
n2 . �52�
The determination of the value of the last constant h depends from the meaning we assign to theeccentricity e in the perturbed motion. We leave aside the discussion on this matter and simplypoint out that, by the supposed smallness of �, we can safely assume h=1. Then the solution wehave found is, in the inertial frame,
r1 = �1 + s1 + �s�� = �1 − 16w2�� + 1
2ae��1+c − 32ae�1−c = − 3
2ae+ + a�1 − 16w2�eint + 1
2ae+�e2 int,
�53�
to be compared with Eq. �14� of the unperturbed motion. Here the perihelion moves at the constantrate �1−c�n while, considering the relation n=��a−3 which is valid for the unperturbed circularorbit, one can say that, in the actual orbit, for a given mean motion n the mean distance is smallerthan it would be without disturbance.
Let us do now a quick application to the planet Mercury perturbed by Saturn, neglecting theeccentricity of the latter and the mutual inclination of the orbital planes. We consider first, using�48�, the variation in the argument of Mercury’s perihelion after the completion of a single orbit,��= �1−c�n�t, where �t=T=2 /n and c has the form �52� with
�
n2 =Gmsat�
Gmsun
amer3
asat�3 =1
3497.90.387u.a.
9.582u.a.3
= 1.883 � 10−8. �54�
Further, to obtain the secular perihelion shift, we recall that Mercury completes 415.19 revolutionsper century, so that in conclusion we get, by transforming from radians to seconds,
��cent =3
4
�
n2n2
n415.19
180
3600 = 7.6�, �55�
a value of about 0.3� higher than that obtained with a comprehensive computation,8 while it isfound that in �53� the shrinking of the circular component of the orbit is about a couple of hundredmeters.
In conclusion, we have constructed a general framework to determine the elliptic orbit infunction of time that has also the potentiality to be used in some situations in which that ellipticalcan be considered only a first approximation to the true motion.
1 M. M. D’Eliseo, Can. J. Phys. 85, 1045 �2007�.2 M. M. D’Eliseo, Am. J. Phys. 75, 352 �2007�.3 T. Needham, Visual Complex Analysis �Oxford University Press, New York, 1999�.4 J. Farlow, J. E. Hall, J. M. McDill, and B. H. West, Differential Equations and Linear Algebra �Prentice-Hall, EnglewoodCliffs, NJ, 2002�.
5 T. Needham, Visual Complex Analysis �Oxford University Press, New York, 1999�, p. 394.6 L. G. Taff, Celestial Mechanics: A Computational Guide for the Practitioner �Wiley, New York, 1985�, pp. 58–66.7 K. F. Gauss, Determinatio Attractionis Quam in Punctum Quodvis Positonis Datae Exerceret Planeta si Eius Massa perTotam Orbitam Ratione Temporis quo Singulae Partes Describuntur Uniformiter Esset Dispertita �1818� �Werke, Got-tingen; Konigliche Gesellschaft der Wissenschaften, 1866�, Vol. 3, pp. 331–335.
8 M. G. Stewart, Am. J. Phys. 73, 730 �2005�.
022901-10 Maurizio M. D’Eliseo J. Math. Phys. 50, 022901 �2009�
Downloaded 26 Feb 2009 to 192.135.20.186. Redistribution subject to AIP license or copyright; see http://jmp.aip.org/jmp/copyright.jsp