THE DETUNSLING OF AN AXIRLLY SYMMETRIC SATELLITE …final state of the system. Both the initial and...
64
R-Ai63 989 THE DETUNSLING OF AN AXIRLLY SYMMETRIC SATELLITE WIITH jijl AN ORBITAL MANEUVER (U) AIR FORCE INST OF TECH NRIGHT-PATTERSON AFB OH SCHOOL OF ENGI K R FLEMING UNCLASSIFIED 13 DEC 85 AFIT/GA/AA/85D-5 F.'G 2212 UL I Ehhhhhhhhhhhh I fflfflf..fflfflfflf
Transcript of THE DETUNSLING OF AN AXIRLLY SYMMETRIC SATELLITE …final state of the system. Both the initial and...

R-Ai63 989 THE DETUNSLING OF AN AXIRLLY SYMMETRIC SATELLITE WIITH jijlAN ORBITAL MANEUVER (U) AIR FORCE INST OF TECHNRIGHT-PATTERSON AFB OH SCHOOL OF ENGI K R FLEMING
UNCLASSIFIED 13 DEC 85 AFIT/GA/AA/85D-5 F.'G 2212 UL
I EhhhhhhhhhhhhI fflfflf..fflfflfflf

r
11111&2
MICROCOPY IRSOLUTON TST CHOI
I
'
~NATJONAL BUJREAU Of S TA
"} IR
o)S
q'
* A 3
~ 140112Z2
111 .111111
€ -125,
M ,"'
EOUTO ES 8~

00
-DTIC
Si LECTE fI FEB 13 M
E DETUMBLING OF AN AI SMRC
I SATELLITE WITH AN ORBITAL MANEUVERINGRVEHICLE BY NONLINEAR FEEDBACK CONTROL
*~ I THESIS
" I Kir R. Flemin
I Appioved o public r-- -- o-,LUJ Distribution Unfird.tod
C.D DEPARTMENT OF THE AIR FORCE
AIR UNIVERSITY
SAIR FORCE INSTITUTE OF TECHNOLOGY
I Wright- Patterson Air Force Base, Ohio
I I 1

-- aAFIT/GA/AA/85D-5
I
DTICELECTE 0
SFEB 1 338
THE DETUMBLING OF AN AXIALLY SYMMETRIC
SATELLITE WITH AN ORBITAL MANEUVERING
VEHICLE BY NONLINEAR FEEDBACK CONTROL
THESIS
Kirk R. FlemingFirst Lieutenant, USAF
LAFIT/GA/AA/85D-5
L
,I.', .. Approved for public release; distribution unlimited
L

AFIT/GA/AA/85D-5
I
THE DETUMBLING OF AN AXIALLY SYMMETRIC SATELLITE
WITH AN ORBITAL MANEUVERING VEHICLE
BY NONLINEAR FEEDBACK CONTROL
THESIS
Presented to the Faculty of the School of Engineering
of the Air Force Institute of Technology
Air University
In Partial Fulfillment of the
Requirements for the Degree of
Master of Science in Astronautical Engineering
P Accesion For
NTIS CRA&IDTIC TAB
UnannoutcedJustificatiol,
Kirk R. Fleming, B.S..Kirk~B ... ....ng B.S..........'..... ............. .
First Lieutenant, USAF Distrit'tio.
Availability Codes
Dist pIalj/ December 1985 Special
Ai-1Approved for public release; distribution unlimited
If

Table of Contents
Page
Acknowledgements ....... .. . ............... ii
List of Figures .... . .. .. .. ............... iii
List of Tables ......................... v
Abstract ....... . .. . ............. ..... vi
Notation ......... ................. vii
I. Introduction ...... . .. . . .............. 1
II. Problem Formulation ....... .. . ......... .. 4
System Configuration.. ....... ... 4The Hooker-Margulies Equations . . .. . .. . . 4Application of the HM Equations ...... . ...... 8
III. Nonlinear Feedback Control .. . ...... . . . ..13
IV. Results ....... .. ................ 20
V. Conclusion ....... ................. 46
References ........ ................. . 48
Vita .......... ................... 49
V
*w- . ' . , . , .,, . ..' ,, . , .. .:.L , .

Acknowledgments
I want to thank my thesis advisor, Lt. Col. Joseph W. Widhalm,
for his guidance during the course of this project. I also owe special
thanks to my classmates Robert Bandstra, William Berrier and Randall
Richey for their helpful insight and comments, particularly with regard
to my source code debugging efforts. I thank all my classmates for the
support they gave me in this last, very busy quarter.
,.
ii

List of Figures
Figure Page
1. The Conway and Widhalm Model for the Two Body Satellite . . 2
2. The Five-Body Satellite Model ................. 5
3. OMV Thrust Torques, Momentum Wheels Uncoupled . .... .. 26
4. Universal Joint Torques, Uncoupled Momentum Wheels ..... . 26
L 5. Joint Position and Precession Angle Decay .. ........ 27
6. Target Spin and Precession Angle Rate Decay . ...... . 27
7. Constraint Loads at Universal Joint ... ......... 28
8. Angular Velocities of OMV with u7 and u8 Feedback Only . . . 29
9. Angular Velocity of OMV with u7 and u8 Feedback Only . . . 29
10. Joint Constraint Loads, u7 and u8 Feedback Only .. ...... . 30
11. Control Torque History, u7 and u8 Feedback Only ..... .. 30
12. Target Spin and Precession Angle Rates, u7 and u8 Feedback Only 31
13. Target Precession Angle and Joint Position,u7 and u8 Feedback Only ............... .. 31
14. OMV Angular Velocity Components; Full Feedback Addedat t = 250 seconds .................... 32
15. OMV b3 Angular Velocity Component; Full Feedback AddedL at t = 250 seconds .................... 32
16. Precession Angle Rate :f Change and Target Spin Rate;Full Feedback Added at t = 250 seconds .. ........ 33
17. Gimbal Control Torque u7 With Full Feedback Addedat t = 250 seconds ................... . 33
18. Control Torque u and Constraint Torque TC; Full FeedbackAdded at t = 258 seconds ................. 34
19. Constraint Force Magnitude and 62 Component; Full FeedbackAdded at t = 250 seconds .............. . 34
iii

UList of Figures, cont'd
Figure Page
20. OMV Thruster Torques, b Momentum Wheel Torque Coupledto Target Precession Anle ................. 35
21. b2 Momentum Wheel Control Torque, u5, and WheelAngular Velocity; Control Torque u5 Coupled
to Target Precession Angle ................. 35
iv

List of Tables
I Table Page
I. Satellite Mass Properties .. ............ 22
II. Initial Conditions ................. 22
III. Gimbal Control and Constraint Torques,Uncoupled Momentum Wheels .. ........... .. 36
IV. Gimbal Control and Constraint Torques,B2 Momentum Wheel Coupled ........ ..... 38
V. Momentum Wheel and Thruster Control Torques,62 Momentum Wheel Coupled .. ......... .... 40
VI. Gimbal Control and Constraint Torques,Gimbal Torque Feedback Only Until t = 250 seconds . 42
VII. OMV Angular Velocity, Target Spin and Precession Angle Rate,1! Gimbal Torque Feedback Only Until t = 250 seconds . . . 44
P
v
EV

AFIT/GA/AA/85D-5
Abstract
The problem of detubling a freely spinning and precessing axi-
symmetric satellite is considered. Detumbling is achieved with another
axisymmetric orbital maneuvering vehicle (OMV) joined to the target sat-
ellite with a universal joint. The joint provides two rotational degrees
of freedom and is translated across the surface of the OMV during the de-
tumbling process. The target satellite and the OMV with its three mo-
mentum wheels are modelled as a five body system using Eulerian-based
equations of motion developed by Hooker and Margulies. A Liapunov tech-
nique is applied to derive a nonlinear feedback control law which drives
the system asymtotically to a final spin-stabilized state. State and
control histories are presented and indicate that the dtumbling process
is benign. Constraint force and moment loads at the connection between
ithe OMV and target satellites are also presented, and indicate that no
extreme loads are encountered during the despinning and detumbling process.
IA
vi
CI A

NotationBmk = mass of body A
m = total system mass
O = inertia dyadic of body A about its mass center
= angular velocity of body XF = non-gravitational external force on bodyTA = non-gravitational external torque on body A
iP = geocentric position vector for mass center of body A
F X" = interaction force acting on body A through joint jAj
= constraint torque acting on body k through joint jAL1 = unit dyadic
Y gravitational constant
= geocentric position vector for system center of mass
b p = unit vector in direction of
TSD = spring-damper torque acting on body X at joint jkj
gi = unit vector along rotation axis of joint i
Yi = angle of rotation about axis gi
(a 0 = angular velocity of the reference body (the OMV)
viiL- '

A.
THE DETUMBLING OF AN AXIALLY SYMMETRIC SATELLITE WITH AN
ORBITAL MANEUVERING VEHICLE BY NONLINEAR FEEDBACK CONTROL
I. Introduction
*The service or repair of orbiting satellites beyond direct reach
of the Space Shuttle may require an orbital maneuvering vehicle (OMV) to
C. rendezvous and dock with the target satellites. If the target 4s spin-
stabilized it may be necessary to despin it. If the target has experi-
enced control system malfunction or for some reason is not in pure spin,
it may be ecessary to detumble it. Docking followed by despinning or
detumbling is defined here as capture. Docking is accomplished bv first
driving a grappling device on the OMV to a state of rest relative to some
docking point on the target. The OMV and target can then be connected.
Despinning or detumbling is accomplished by applying torques to the tar-
get through the connecting joint while firing the OMV thrusters to control
the absolute motion of the two-body system. Widhalm and Conway derived a
Rfeedback control law (1) which solved the despinning/detumbling problem
for the case of axisymietric target and OMV satellites. They used a con-
necting joint which could translate across the surface of the OMV. The
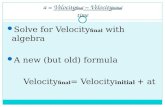
translational degree of freedom of the joint is depicted in Fig. 1 by the
double arrow. The ability to translate the joint provides for joint pos-
ition adjustment during docking, and allows the joint to be driven to the
OMV axis of symmetry during detumbling. The resulting configuration can
then be spin-stabilized.
This thesis extends the Widhalm and Conway model to include three
orthogonal momentum wheels on the OMV, and develops a feedback control
.4

Body 1
Fig.1. heowy an0 ihi h woBd aelt
2

law to couple the momentum wheel torques to the system state. The target
satellite docked with the OMV and its three momentum wheels are modelled
as a system of five rigid, constant mass bodies. The control problem is
formulated by defining the system initial configuration and the desired
final state, and by deriving the equations of motion.
:.3p:
°53
N.,

II. Problem Formulation
System Configuration
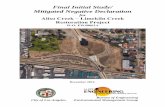
An axisymmetric target satellite is docked with an OMV which,
with its three orthogonal momentum wheels, is also axisymmetric (see
Fig. 2). The target and OMV are connected with a universal joint having
two rotational degrees of freedom and the capability of translation
across the surface of the OMV. The translational degree of freedom is
depicted in Fig. 2 by the bold double arrow. The center of mass of the
target lies on the b3 axis as does the mass center of the OMV-mori ntum
wheel combination. The OMV is in a state of pure spin about b3, and the
target is in a state of spin with precession about 63 at a rate equal to
the OMV spin rate. With no external moments or forces acting on the sys-
tem a dynamically stable configuration results. This configuration rep-
resents the initial state of the system. The detumbling and despinning
process is complete when the joint has been driven to a position lying on
the 63 axis, and the target spin rate relative to the OMV is zero with
the OMV itself still in a state of pure spin about the 63 axis. This
configuration, or one arbitrarily close to it, represents the desired
final state of the system. Both the initial and final states as defined
imply that the initial and final angular velocities of the momentum
wheels having rotational freedom about the b and b axes are zero. The
initial and final angular velocity of the b3 wheel is arbitrary.
The Hooker-Margulies Equations
The dynamical attitude equations for a two-body satellite were
derived by Fletcher, Rongved and Yu (2), and were generalized for an
4 4

Bodyy 1
,e2 L3 /*
F. e e S i M
"" b3 b
Body 0 e3/
" ' Body 1 l
• Note:
"" I l [I61 i[ l i 4
-2,t'Fig. 2. The Five-Body Satellite Model
4,.
44 5 .

complete derivation is a set of 3n scalar equations for an n-body system.
The equations are free of the unknown joint constraint forces, but still
contain the unknown constraint torques (3:125).
* Hooker (4) showed in a subsequent paper that the constraint
torques could also be explicitly eliminated. The equations derived in
reference (3) are written for all the bodies iying on oite side of a se-
9lected joint and subsequently added. The interaction torques all cancel
in pairs, with the exception of the constraint torque at the free joint.
If the selected joint has a rotational degree of freedom about an axis
g, the dot product of g and the expression just found for the torque is
zero. Writing the dot product and setting it to zero yields an equa-
tion free of the constraint torque. Repeating the process for each de-
gree of freedom at each joint eliminates all the unknown constraint
torques and yields a system of r equations for an n-body system having
r rotational degrees of freedom. These equations are referred to in
some of the references as the modified Hooker-Margulies equations.
Although for an identical dynamical system a Lagrangian deriva-
tion would provide the same number of equations as the HM equations, the
resulting expressions would not be written in terms of the physical body
axes, as are the HM and modified HM equations. As a result adaptation
to active control and modification to include effects such as joint motion
would be more difficult (4:1205). The modified HM equations significant-
ly reduce the required computer time for solution due to the reduction
in the number of equations from 3n to r.
The constraint torques at the joints were eliminated explicitly
" by taking the dot product of the unit vector about which the joint is
* '6
'woo. 0

n-body system by Hooker and Margulies (3). Both derivations assume that
the bodies are connected by joints which are fixed with respect to the
bodies they connect. In addition, the generalized Hooker-Margulies (HM)
equations assume Lhat the bodies are -onnected in a topological tree.
This means that there are no closed loops formed by the interconnected
bodies. The restriction of immoveable joint is removed in an extension
of the HM equations which will be discussed later. The extended equa-
tions then apply to the OMV-target satellite system when modelled as a
system of five interconnected rigid bodies.
The derivation of the HM equations begins with the Newton and
Euler equations for an n-body system. Each of the two sets of equations
contains force terms representing the unknown constraint reactions which
occur at the joints between adjacent bodies. An expression for each
joint constraint force can be isolated by writing Newton's equations for
all the bodies that lie to one side of any selected joint. The equations
are added together, with the result that all the interaction forces can-
in pairs with the exception of the constraint force occurring at the
selected joint. Repeating the process for all the joints in the system
yields expressions for all the unknown constraints in terms of the system
external forces and in terms of the inertial accelerations of each body
in the system.
The joint constraint forces appear in Euler's equations as
torques about the individual body mass centers, and can be replaced by
the expressions For the constraints obtained in the process described.
The result is the original Euler equations for the system, but with the
unknown joint interactions explicitly eliminated. The result of the
7.

free to rotate (there may of course be more than just one) with the
summed vector dynamical equations for the bodies that lie to one side of
that joint. The value of the constraint torque can be computed after
'the modified HM equations are solved, however. Given the system state.
the derivatives of the state variables can be computed using the modi-
fied HM equations. All the variables in the equation which was dotted
with the joint degree of freedom vector ^ are then known, and can all be
brought to one side of the equation with the resulting sum equalling the
scalar components of the constraint torque (4:1207).
The interaction force at the joints can be computed by finding
the accleration of the mass center of the system of bodies lying to one
side of a joint (relative to the system mass center) and multiplying by*the total mass of that subsystem. For the case of no external forces,
the product is the vector constraint force acting at the selected joint.
Application of the HM Equations
The Eulerian-based equations of motion for multi-body systems
given by Hooker and Margulies (3) and modified by Hooker (4) are restric-
ted to those systems of bodies connected in such a way that no closed
loops are formed, and do not account for motion of the joints relative
to the bodies adjacent to the joint. This last restriction was removed
in an extenstion of the modified HM equations by Conway and Widhalm (5) to
permit the translation of the joint across the face of the OMV. Thus the
extended equations can be applied to the OMV, momentum wheels and target
satellite system under consideration. Referring to Fig. 2 the OMV is
labelled body 0, with the b basis fixed at its geometric center. The
geometric center of the OMV is chosen to coincide with the center of mass
- 8

of the OMV-momentum wheel composite. That is, remove the target from the
system and the system center of mass then lies at the origin of the
, frame. The momentum wheels lying on axes b1, 62, and 63 are labelled
bodies 1, 2, and 3 respectively. The target satellite is body 4. The
e basis is fixed in body 0 at its mass center, and the n basis is fixed
in the target at its mass center. Since the target is precessing about
its own angular momentum vector at a rate, b , the OMV is positioned
relative to the target so that the target's center of mass and angular
.2. momentum vector both lie on the b3 axis. The OMV is then spun about 63
at the same rate, ' the target precession rate. The cone angle, 4'LY4
and the distance from the target center of mass to the joint determine4the required position of the joint on the OMV face for docking. The
target's cone angle,)'4 , precession rate, , spin rate,Y 5 , and mass
properties are related as shown by Greenwood (6:386) and repeated here:
S1' = 5/(I 0 - I)cosV 4 (Y)
where I is the target's moment of inertia about the nI and n2 axes and
10 is the target's moment of inertia about the spin axis, A3 "
The two rotational degrees of freedom required at the universal
joint include rotation, Y4 , about an axis g4 parallel to b and rotation
Y5 9 about an axis g5 parallel to n3 . The rotational degrees of free-
dow for the momentum wheels labelled 1, 2, and 3 are axes il' 62' and i3-. respectively. These three axes are parallel to the corresponding 6 frame
axes, with the wheel joints themselves taken to be at the mass centers of
the wheels. From this initial docked configuration the problem is to
drive the system to a final spin-stabilized state with a set of feedba
. 94 1'
. .'

kb
controls. This final state is specified by requiring the joint location
to coincide with the 3 axis, and that the cone angle,Y , and spin rate
5 , be reduced to steady state values of zero.
In the following equations of motion, all vectors and scalar
rates are with respect to the e basis fixed in the main body, the OMV.
The attitude equations for the OMV-target satellite system can be derived
directly from the extended equations given by Conway and Widhalm (5) and
are:
a 0 a01 • • 05 0 "(mO40"m4140)
10 11 1' 1
- "21 g2 2 (2)
"3 3 E 3
a540 [ 4 + oD x G L ao 50• . .iJ 5J P5 • * t .+ mD4o x a .
where
a 0 u a dyadic00 :'k • , avector
aOk k p §k0 ~ ~(3)aio = gik OAP a vector
a gik gi " EiA(kl' " g , a scalar
1, if g belongs to a joint anywhere on the chain
and 4E. of bodies connecting p and the reference body (0)
0, otherwise (e.g. if iA= 0)
and04 x 04
10(e L

Oxx *0A + Ml 'k Ml (5)A]+~~ L~,D
*,=-m[ 6 lJ -DX\' (6)X= )mA (7)
DA CX A + (8)
The vector EA, is the vector from the center of mass of body A
to the joint leading to body p. is determined from
A = E kg k gk(9)
and Ex is the vector
yV xOA. @, -SDEA = 3YP OXx Ax. jJ Aj
+DA F+ Y. DA [F,; + M,,X (raX JA) (0
+ m Jl-3 ) .^DAP)l
In Eq (2) CO 0 I0e + U02e 2 +(J0 3e 3 and the Yi correspond
to degrees of freedom about the unit vectors gi. Superscript R implies
that the indicated time differentiation is performed with respect to an
observer fixed in the i-frame. From Eqs (7) and (8) and from the defi-
nition given for L X111 it is clear that the indicated time derivatives
of Df4 are determined from the universal joint motion alone since the
momentum wheel joints do not move with respect to the OMV. The joint
motion is specified as are the control torques -SD in Eq (10). In this
analysis, the external torques T' are the three orthogonal thruster
torques acting on the OMV, and all external forces are assumed zero. In
addition, all gravitational terms are ignored (all terms containing the
position vector ). The way in which the control torques (including
11
L ~~*A

thruster torques) and the joint motion is specified is covered in the
I next chapter.
. The constraint forces and torques have been eliminated from the
-' equations of motion as described earlier. These quantities can be deter-
mined by the methods described in references (3) and (4). The expres-
sions for the constraint force and torque at the universal joint are:
FH = (m - m4) 0 (11)044 P
T4' (044+ 040) •0 + (044 • 4) 4
(12)+ (044 * 95 5 7'- 1*4. - mU40 x
. where f0 is the position vector of the mass center of the OMV-momentum
wheel combination, relative to the system center of mass, and where U is
as given in Eq (4).
p
IV
j2
w'Q :$ "12

III. Nonlinear Feedback ControlIThe detumbling and despinning problem presented here involves
"In driving the universal joint connecting the 0MV and target satellites
across the face of the OMV to a point coincident with the b3 axis (see
Fig. 2). Feedback control is used to maintain the attitude of the five-
body system in such a way that the final state of the system is spin
stabilized. The Droblem solution incorporates a feedback control ap-
proach in which an eight element control vector, U, is a nonlinear func-
tion of the system state variables. In this chapter the eight controls
are defined so that the equations of motion can be written in a simpler
form more suitable for Liapunov analysis. This procedure closely paral-
lels that described by Widhalm and Conway (7:6-9) in their derivation of
a control law for the two-body satellite system described earlier.
Liapunov's direct method is then used to derive a control law which is
globally asymptotically stable with respect to the spin-stabilized equi-
librium state.
Eq (2) is first written in the form
A x = (13)
where A is defined as the 8 x 8 matrix on the left-hand side of Eq (2).
The vector, F*, is defined as the eight element vector on the right-hand
side of Eq (2), and
Tx = [k 1 2 x3 x4 X5 x6 x7 x8 ]
= [ "'01 "02 (3 'l '2 i3 V4 )5] (14)
13

Eq (14) is derived from the state variables
x= [ 1 x 2 x3 x4 x5 x6 x7 x8 ]T
C' 0l W02 '03 'l '2 3 4 5 ] (15)
The control vector, U, can be selected (7:6) so that Eq (13) can
be written as
A =F+ U (16)
Since the components of the vector, x, are the three angular acceleration
components of the OMV, the three scalar angular accelerations of the
othogonal momentum wheels, and the angular accelerations of the target
about the two degrees of freedom at the joint, the appropriate control
vector components are apparent. The control vector, U, is composed of
three orthogonal (thruster) torques about each of the i-basis vectors,
three internal torques applied at the wheel axes, and finally two inter-
nal torques applied in the two degrees of freedom of the universal joint.
These control torques are designated u1 through u8, respectively. Pre-
multiplying Eq (16) by the inverse of matrix A yields
x = A F + A U (17)
since the matrix, A, will always be invertible for physical systems. The
system of Eq (2) is augmented with the kinematical equation
k 9 = x7 (18)
where x9 is defined as the target precession angle, 74, and complates
* the set of equations of attitude motion. We define the augmented state
14

vector, iZ9, to contain the vector, 7, plus the ninth element, x9 .
To derive the control vector, U, as a nonlinear function of the
augmented state vector, 179 , and the joint motion, a lemma presented by
Vidyasagar (8) is applied. The lemma applies to autonomous systems, and
the system of Eq (16) is nonautonomous because the OMV-target connecting
joint motion is a specified function of time. Widhalm and Conway (7:7)
"* have suggested that, by specifying the joint motion as a third order lin-
ear system which is asymptotically stable with respect to the desired
- final joint position, the third order system with Eqs (17) and (18) form
an autonomous system. Since the desired final joint position relative
to the b-frame is given by the vector [ 0 0 c ] , and since the HM
equations are written in terms of the e-frame, we define the vector, Z,
to be the vector ledding from the origin of the b basis to the mass
center of the OMV, the origin of the e-frame. The scalar values that are
to be driven to zero for asymptotically stable joint motion are the posi-
tion, velocity, and acceleration components of the joint lying along the
62 axis. These scalars are given by:
( C+ L04) 62 = Yl
L4 b= 2= 'l (19)
L04~ 62 y3 =
The derivative of the vector, E, does not appear since the vector posi-
tion of the OMV mass center relative to the geometric center of the OMV
is constant. The complete autonomous system required for the application
of the previously mentioned lemma is given by Eqs (17), (18), and (19)
"• 15
~% N

and is formed by writing
x A- T AI -+_I
Xgx7 (20)9 7Dy7 D Y
where D is a negative definite matrix selected to obtain the desired de-
cay of the scalar yl given in Eq (19). The joint motion terms contained
in the matrix, A, and in the vector, F, are now specified by the vector
- leaving the system, (20), independent of time.
The lemma developed by Vidyasagar (8:157) in his discussion of
Liapunov's direct method now applies to the system, (20), and is stated
as follows: "Let V(ix 9. y) be continuously differentiable and suppose
that for some d > 0 the set
| * _
Sd = ix9 , 37: V(7q9 , Y)- d ]
is bounded. Suppose that V is bounded below over the set S* and thatdC
V(Ix 9 , Y) K 0 for all i79 and 7 in Sd*. Let S denote the subset of Sd de-
fined by
=S 1 [ 9, S Sd : V(li9 , 7) = 0 I
C-and let M be the largest invariant set of a system which is contained in
S. Then whenever iR9 (0) and Y(0) are members of Sd, the solution of the
system, (20), approaches M as t--."
Now M is an invariant set of system, (20), if every trajectory
starting from an initial point in M remains in M for all time. Since the
P" system, (20), is autonomous every trajectory through its state space isIL
16
55 :_ "" :; " ?i : -; " _ ,: : "?" ' ""? ::- ->"": ; *''- "": c

an invariant set (8:156). The task then is to find a candidate Liapunov
function, V, that meets the requirements of the lemma. To derive a non-
linear feedback control law that drives the five-body system to the de-
sired final state of spin-stabilized equilibrium, Widhalm and Conway (7)
suggested a candidate Liapunov function like
(1V (1/2) RT I 3 + (1/2) K x2 + yT R (21)
where I is the identity matrix, K is a positive constant, and R is a
positive definite constant matrix. The function is continuously differ-
entiable, and it is easy to select a vector R and a constant, d, to
demonstrate that a set like Sd exists.
The condition on V(- 9 , 7) must be satisfied; differentiating
V with respect to time yields
3J I3 T -X' + K x9 +9 y T + yT R - (22)
Substitution from the system, (20), gives the result
3 V Z3CT I ( A- ' "F + A-' U] + K x9 x7
+ yT [DT R + R D ] y (23)
Now since R is a positive definite matrix and D was specified to be a
negative definite matrix, then the expression DTR + RD is negative
definite. Writing the Liapunov matrix equation
-Q = DT R + R D (24)
and defining
_ T T (25)y Qy
17

implies both that Q is positive definite from Eq (24) and that as a
result both V and -V are positive definite (8:172). Thus the third
term in Eq (23) is negative definite. To make V at least negative sermii-
definite, select the control vector
5 =-F+A [ 0 0 0 0 0 0 -Kx9 0 T AB (26)
where the matrix B is positive definite or positive semi-definite. If
the matrix B is positive definite, then V is negative semi-definite in
x9. However, if the elements of B are positive except for B33 = 0 ,
V is negative semi-definite in x3 and x-. Then from the above lemma the
- system, (20), with control vector 9 of Eq (26) is asymptotically stable
with respect to the largest invariant set contained in the x3, x9 plane.
But from Eq (2b) it can be seen that any non-zero xg results in a non-
zero control vector U, which in turn causes a departure from the x3, x9
plane. Therefore the largest invariant set lies in the x3, x9 plane, but
. only in that region where x9 is zero, namely the x3 axis. The control
vector 0 of Eq (26) is then the desired nonlinear feedback control law
for spin-stabilization of this system.
Non-zero off-diagonal terms must be included in the B matrix of
Eq (26) which will couple the momentum wheel torques to state variables
other than just the momentum wheel angular velocities. The torques must
be coupled to the state variables in such a way that the angular rates of
h the gl and 92 wheels decay to zero, so that the system stabilizes in pure
spin. Implementing the control law of Eq (26) requires the determination
of the non-zero elements of the matrix B, and the constant K. In theirwork with the two-body satellite system, Widhalm and Conway have suggested
I
18

that controls can be kept within reasonable limits by ensuring that the
target center of mass does not depart appreciably from the b3 axis. This
can be accomplished by selection of the matrix D, which controls the uni-
versal joint motion, in conjunction with K and the B77 element of the B
matrix. Joint motion can be specified which will closely follow the de-
cay of the target's precession angle, and maintain the proximity of the
target mass center to the b3 spin axis. Finally, substitution of the
control vector 5 of Eq (26) into Eq (20) yields the complete, linear
system
i -Kx9 0T B
x9 = x7 (27)
y = D
From Eq (27) it can be clearly seen that if the matrix B is dia-
gonal, and if the initial momentum wheel angular rates as well as the
. OMV angular velocity components w01 and (0 are zero, they will remain
zero throughout the detumbling process. In the case where the only off-
diagonal terms in B are those coupling the momentum wheel torques to
selected system states, the cOl and ('02 angular velocity cohmponents of
the OMV still remain zero. This implies that the throughout the maneuver
the OMV remains in a state of pure spin.
4)..
19

IV. ResultsJIn this chapter the basis for the selection of initial conditions
K. and system mass properties is presented, as well as the values selected.
System state histories and control torque histories are presented for
four detumbling maneuvers. The four maneuvers include detumbling with
feedback control without momentum wheel coupling, feedback control with
a single momentum wheel coupled, detumbling using only gimbal (joint)
torques, and finally, detumbling using only gimbal torques for the first
250 seconds, followed by 50 seconds of feedback control applying the full
control torque vector with one wheel coupled. Representative histories
for the constraint loads at the joint between the OMV and the target sat-
ellite are also given.
System mass properties were selected based on values used in pre-
vious research (9). The mass properties of the composite body consisting
of the OMV and the three attached momentum wheels were selected to dupli-
cate those of the OMV model used by Widhalm (9). Reasonable but arbitrary
values of mass and moments of inertia were then selected for the three
identical wheels. From this information and by specifying the location
of the mass center of the composite OMV-momentum wheel system, the mass
and inertia matrix for the OMV (without wheels) were computed. In this
way direct comparisons could be made between the two-body and five-body
analyses by completely decoupling the wheel control torques from all non-
zero system states. As mentioned previously, this is accomplished by
selecting all off-diagonal terms of the matrix B in the linear system
(27) to be zero. Under this condition, the values of elements B44, B55,
and B66 are completely arbitrary. In addition to the various mass
.66
20
.1

properties, the system state variable initial conditions were also dupli-
cated from reference (9). The mass properties and initial conditions are
given in Tables I and II, respectively.
From Eq (27) and from the discussion that immediately follows it,
it can be seen that the values selected for elements B11 and B22 are also
arbitrary, since they will always be multiplied by states x and x2, which
, remain equal to zero throughout the detumbling, despinning maneuver. The
values actually selected are those used by Widhalm (9) in the application
* of feedback control to the two-body satellite system. In that case states
x and x2 attained non-zero values after approximately 290 seconds of
open-loop control. Feedback control was then applied in an attempt to
spin-stabilize the system, the desired response being obtained using the
values B11 = B22 = 0.046
The remaining constants to be determined include B77' B88 , K, and
the elements of the D matrix of the third order joint motion equation in
Eq (27). Selecting the scalar equation from the 12 equation system of
Eq (27) corresponding to the target precession angle motion, the constants
- B77 and K can be determined by specifying a desired final precession
* angle at the end of the maneuver. A total maneuver time of 300 seconds
was selected, and critical damping specified. A final precession angle
corresponding to the target mass center on the OMV spin axis and a final
joint position equal to 0.05% of initial joint position was specified.
The result obtained from these requirements is a solution with equal
eigenvalues of about -0.035, with B77 = 0.07 and K = 0.00123. In a
similar way, with the specification of the final joint position just
given and with critical damping of the joint motion, equal eigenvalues
21

TABLE I
Satellite Mass Properties
MASS I1 12 13
Target Satellite 1000 Kg 1000 Kg-m2 1000 Kg-m2 1100 Kg-m 2
0MV 4500 Kg 6400 Kg-m2 6400 Kg-m 2 11800 Kg-m 2
Momentum Wheels 10 Kg 25 Kg-m2 25 Kg-m2 55 Kg-m 2
TABLE II
Initial Conditions
Variable Meaning Value
(. 01 e1 component OMV angular velocity 0.0
(J02 a2 component OMV angular velocity 0.0
W 03 e3 component OMV angular velocity 0.102
1 #1 momentum wheel ;pin rate 0.0
2 #2 momentum wheel spin rate 0.0'3 #3 momentum wheel spin rate 0.0
4 target precession angle rate 0.0
"15 target spin rate 0.009
(L04 + ). b2 joint position 0.599
L b joint velocity 0.0Ln4 2
L04 b 2 joint acceleration 0.0
>14 target precession anqle 0.349
Note: Values in TABLE II are given in meters, radians,or radians per second, as applicable.
p.222
U

of -0.04 were obtained for the joint motion equation. This resulted in
values of D31 = -0.000064, D32 = -0.0048, and D33= -0.12 . Finally,
solving the eighth scalar equation of the system of Eq (27) by requiring
that the target spin rate be reduced to 0.5% of its initial value yields
the value of B88 = 0.02.
With the momentum wheels uncoupled the system behavior was ident-
ical to that of the two-body system in Fig. 1, verified by the comparison
of the results with those of Widhalm (9). Wheel torques were zero, with
the OMV thrust torques and universal joint torques given in Figs. 3 and 4.
None of these control torques reached large values, and it can be seen
4 that the controls vary smoothly with time with no abrupt changes. The
joint motion and precession angle decay behaved as specified, decaying
to the small final values specified with no overshoot. The results are
given in Fig. 5. The target spin rate decay displayed similar behavior.
The precession angle rate of change and target spin rate histories are
given in Fig. 6, where it can be seen that no radical motion has occurred.
* The constraint loads at the universal joint due to lack of rotational
freedom and due to the loading required to drive the joint across the OMV
were relatively small. The constraint torque maximum value was approxi-
mately 2 Nm, and the maximum force encountered in driving the joint was
about 1 N. These results are shown in Fig. 7, where the magnitude of the
constraint force is plotted, as well as the component of that force lying
ZI along the axis of joint motion. This b2 component corresponds to the load
7 'capacity that would be required for a jackscrew, for instance, were such
a device used on the OMV to obtain the desired joint motion.
Although global asymptotic stability is only guaranteed by the
23
I
4,

lemma used earlier for the case of feedback control with the control law
of E(26), it was of interest to attempt system despin and detumbling
using only control torques applied at the universal joint. The result
was that the system displayed no radical or unusual behavior, and appro-
ached a nearly spin-stabilized state after 300 seconds of control. The
OMV still remained in a state closely approximating pure spin, although
.4 non-zero angular velocity components did remain. Figs. 8 and 9 show the
OMV angular velocity history for this maneuver, and indicate that the de-
parture from pure spin was modest. Constraint torque and interaction
force at the connection also remained small, although as indicated in
Figs. 10 and 11, a quasi-steady state condition was reached with continu-
ous constraint and control torques experienced at the joint. A residual
precession angle remained after the maneuver, but the rate of change of
the precession angle was very small, indicating that the available con-
trol torques were able to maintain the system configuration but unable to
change it at any appreciable rate. Although there was some oscillation
in the precession angle rate of change, no other violent behavior occur-
ed with respect to either target spin or precession angle changes. The
results are shown in Figs. 12 and 13.
" -The maneuver described above was repeated, but at 250 seconds the
full control vector was applied in an attempt to spin-stabilize the sys-
tem. The residual non-zero c02 component of the OMV angular velocity
was reduced nearly to zero, and the OMV spin rate brought to a steady
value (see Figs. 14 and 15). The relative spin rate of the target and the
* precession angle rate of change were likewise reduced to very nearly zero
as indicated in Fig. 16. Although not plotted, the precession angle of
24
fV.
UI

L2
the target was reduced to half of its value at 250 seconds, or approxi-
mately 0.9 degrees. Figs. 17 through 19 show the attendant reductions
- .~.in the constraint and control torques and in the constraint force at the
joint. These data clearly indicate that the system is moving toward a
pspin stabilized equilibrium.
An attempt was made to couple the momentum wheels to the target
precession angle rate and spin rate. The magnitude of the OMV thruster
torque about each of the b axes was integrated over the maneuver period,
and the three resulting values added to obtain some measure of the total
torque power required from the thrusters. The resulting total was then
compared for maneuvers completed using various off-diagonal gain terms inIA
the B matrix of Eq (26). No attempt at using control torque on the b3
wheel yielded a reduction in the OMV thruster torque requirements. Using
applied torque at the b2 wheel by setting B57 to 1.0 resulted in a reduc-
tion of the integrated thrust torque from 436 Nm-sec for no wheel coupling
,. to approximately 377 Nm-sec. The resulting thruster control torques and
momentum wheel control torque are shown in Figs. 20 and 21. Fig. 21 also
includes the b2 momentum wheel angular rate history during the maneuver.
These results indicate that the system is well behaved in the
sense that despinning and detumbling can be accomplished with relatively
small control requirements, and that no violent dynamical behavior occurs
even when internal control torques only are applied. Also, the use of.4 .
momentum wheels to reduce thruster requirements is possible, although no
evidence is presented that the wheels provide any major benefit in terms
of efficient system control.
N 25

C 4.0-Ul
2.0 -
a-0-0 -
0.0 50.0 100.0 150.0 200.0 250.0 300.04 TIME, SEC
Fig. 3. OMY Thrust Torques, Momentum wheels Uncoupled.
2. 0
U8
;10-0 - ---------------------------------
-2.0-10.0 50.0 100.0 150.0 200.0 250.0 300.0
TIME, SEC
4 Fig. 4. Gimbal (Universal Joint) Torques, Uncoupled Momentum Wheels.
26

1! .00 -_ _ _ _ _ _ _ _ _ _ _ _ _ _
S- Precess. Ang., rad
-------- Joint Position, m0.75
0.50 "%
0.25-
0.00 -0.0 50.0 100.0 150.0 200.0 250.0 3-00.0
TIME, SEC
Fig. 5. Joint Position and Precession Angle Decay
0.010------ Target spin, rad/sec
____Precess. Ang. rate,1.0 rad/sec
0-005-'
0.000-
0.0 50.0 100.0 150.0 200.0 250.0 300.0TIME, SEC
Fig. 6. Target Spin and Precession Rate Decays
27...
'li !--0. 05 -I I 27
i} 0. 00£O . 5 .02 00.5 . 0 .
TIEIE
i ig 6. Tage pi ndPecsio t ecy

-.-:- 2,0-
1-- 0.0 - --
---- IFC1, N
-2.0
0.0 50.0 100.0 150.0 200.0 250.0 300.0TIME, SEC
Fig. 7. Constraint Loads at Universal Joint
2
I!
4
28
'I
,U
,.,.- , ,,w - .,v L , - ,:,,,,:,: ' "4'i - , . .p "- . 2 ." .'.' . ....... .-. . .-.-- .". . - . . ;.. - . .-.;

0.02
:".0 01 - -----------------------
J/
/
0.00-- ,,rad/secoa, rad/sec
-0.01-0.0 50.0 100.0 150.0 200.0 250.0 300.0
TIME, SEC
". Fig. 8. Angular Velocities of OMV with u7 and u8 Feedback Only-?*
0.106-* .°9
0.104- C ,, rad/sec
~0-102- -°
4i 0.100
0.0 50.0 100.0 150.0 200.0 250.0 300.0TIME, SEC
Fig. 9. Angular Velocity ca3of OMV with u7 and u8 Feedback Only
29
k.

4-0-
2.0 -- F FCI N
II
-2.0-F C N2'
0.0 50.0 100.0 150.0 200.0 250.0 300.0TIME, SEC
*-Fig. 10. Joint Constraint Loads, u7and u 8 Feedback Only
00- 0 -----
u 8 torque, Nm
- u7 torque, Nm
-~ -2.0-
-4.0-
-4.* .. " ,
0.0 50.0 100.0 150.0 200.0 250.0 300.0
me L
L' TIME, SEC
'"Fig. 11. Cointo osruaitLoads, u 7 and u 8 Feedback Only
\,.3-'" 30

0.010 Target spin, rad/sec
-----Precess. Angle Rate of
Change, rad/sec
0.005-
0.000- --------------------
-0.005
0.0 50.0 100.0 150.0 200.0 250.0 300.0TIME,SEC
Fig. 12. Target Spin and Precession Angle Rates, u7 and u, Feedback Only
0 6- %- Precess. Ang., rad
- Joint Position, r
0.4-
0.2 '
000 50.0 100.0 150. 200. 250.0 300.0TIME, SEC
Fig. 13. Target Precession Angle and Joint Position, u 7 and u 8Feedback Only
31
4,, ,

0.015
0.010- .
"0-005-'
0.000-...:/ Wo,, rad/sec
-0.005- @ , rad/sec
-0.010
0.0 50.0 0O0.0 150.0 200.0 250.0 300.0TIME, SEC
Fig. 14. OMV Angular Velocity Components; Full Feedback Addedat t 250 seconds
0.102-(a.., rad/sec
0.101-
S0.lO 0 00.0 50.0 100.0 150.0 200.0 250.0 300.0
TIME, SEC
Fig. 15. OMV b3 Angular Velocity Component; Full Feedback Addedat t 250 seconds
32
6*

0.010
Precess. Angle Rate ofU Change, rad/sec
0.005- - Spin rate, rad/sec
0.000-oo o --------------
-0.005-
-0.010 -
0.0 50.0 100.0 150.0 200.0 250.0 300.0TIME, SEC
Fig. 16. Precession Angle Rate of Charge and Target Spin Rate; FullFeedback Added at t 250 seconds
0.0-Torque in Newton-meters
-4.0-
3,3
-6.0
0.0 50.0 100.0 1,50.0 200.0 250.0 300.0' • TIME, SEC
Fig. 17. Gimbal Control Torque u7 With Full Feedback Added[i at t = 250 seconds
"" 33
q 2S'&

1.0
* 0.0
it,,
NmT Nm,
-2.0 "
0.0 50.0 100.0 150.0 200.0 250.0 300.0TIME, SEC
Fig. 18. Control Torque u8 and Constraint Torque TC; Full Feedbackat t = 250 seconds
4.0-
F 2.0-0 -I
0.0.
-2.0 ---.
-4.0
0.0 50.0 100.0 150.0 200.0 250.0 300.0TIME, SEC
Fig. 19. Constraint Force Magnitude and 6 Component; FullFeedback Added at t 250 secongs
34
oIlk,

0.0 -
/Js,, Nm
u Nm/# 2
- .0 - 3
• ., : -4.0 ,,
0.0 50.0 100.0 150.0 200.0 Z50.0 300.0TIME, SEC
Fig. 20. OMV Thruster Torques, b Momentum Wheel TorqueCoupled to Target Preceision Angle
0.3..,, u5 Nm
:, , rad/sec
0.2P --
0.1 /
0.0
-0.1
0.0 50.0 100.0 150.0 200.0 250.0 300.0TIME, SEC
Fig. 21. b Momentum Wheel Control Torque, u , and Wheel Angular2 Vel.; Control Torque u5 Coupled o Precession Angle
.,4 > 35
I

TABLE III.
time u u8 TC IFCI F2
0 -1.500 -. 192 .000 .613 -. 5765 -.822 -. 242 -.984 .503 -.225
10 -. 176 -.267 -1.576 .631 .09715 .399 -.274 --1.897 .759 .37420 .884 -. 267 -2.032 .859 .60125 1.273 -.251 -2.043 .935 .77830 1,568 -.230 -1.973 .993 .90735 1.777 -.207 -1.853 1.033 .99240 1.909 -. 183 -1.705 1.056 1.04145 1.976 -. 161 -1.545 1.061 1.05850 1.989 -. 140 -1.382 1.051 1.05055 1.959 -.121 -1,224 1.027 1.02360 1.895 -. 104 -1.076 .990 .98165 1.808 -.090 -.939 .945 .92870 1.703 -.077 -.815 .892 .86975 1.588 -.067 -.704 .835 .80680 1.468 -.058 -.606 .775 .74185 1.346 -.050 -.520 .714 .67690 1.226 --.043 -.445 .654 .61395 1.109 -.038 -.380 .595 .553100 .998 -.033 -.324 .538 .496105 .894 -.029 -. 276 .484 .443110 .797 -.025 -. 235 .434 .393115 .708 -.022 -.200 .387 .348120 .626 -. 020 -. 170 .344 .307125 .552 -.018 -. 144 .304 .270130 .485 -.016 -. 123 .268 .236135 .425 -.014 -. 104 .236 .207140 .371 -. 012 -. 089 .207 .180145 .323 -.011 -.076 .181 .156150 .281 -. 010 -. 064 .157 .136155 .244 -.009 -. 055 .137 .117160 .211 -. 008 -. 047 .119 .101165 .182 -.007 -.040 .103 .087170 .157 -.007 -.034 .089 .075175 .135 -.006 -.029 .077 .064180 .116 -. 005 -. 025 .066 .055185 .100 -.005 -.022 .057 .047190 .085 -. 004 -. 019 .049 .040195 .073 -.004 -.016 .042 .034200 .062 -. 004 -. 014 .035 .029205 .053 -.003 -.012 .030 .025210 .045 -. 003 --.010 .026 .021215 .038 -.003 -.009 .022 .018220 .033 --.00.2 -. 008 .019 .015225 .028 -. 002 -. 007 .016 .013230 .023 --.002 -,006 .013 .011
36
iAl

TABLE III., cont'd
time u7 u8 TC IFCI FC
235 .020 -.002 -'.005 .011 .009240 .017 -.002 -.004 .010 .008245 .014 -.001 -.004 .008 .006250 .012 -.001 -.003 .007 .005255 .010 -.001 -,003 o006 .005260 .008 -.001 -.002 .005 .004.265 ,007 -.001 --.002 ,004 .003270 o006 -0001 -.002 .003 .003275 .005 -.001 -.002 .003 .002280 .004 -1001 -.001 .002 .002285 .004 -.001 -.001 .002 .002290 .003 -.001 -.001 .002 .001295 .002 -.001 -.001 .001 .001
Note: This table of universal joint control torques andconstraint loads applies to the case of feedbackcontrol with uncoupled momentum wheels.
,i3
,1i
4b
-V 37
6

TABLE IV.
time u7 u8 TC IFCI Fc7 8 2
0 -1.500 -. 192 .000 *613 -. 5765 -.822 -.242 -.984 .503 -.225
10 -. 176 -. 267 -1.576 .631 .09715 .399 -.274 -1.897 .759 .37420 .884 -. 267 -2.032 .859 .60125 1.273 -. 251 -2.043 .935 .77830 1.568 -.230 -1.973 .993 .90735 1.777 -.207 -1.853 1.033 .99240 1.909 -. 183 -1.705 1,056 1.04145 1,976 '-#161 -1.545 1.061 1,05850 1.989 -. 140 -1.382 1051 1.05055 1.959 -. 121 -1.224 1027 1.02360 1.895 -. 104 -1.076 .990 .98165 1.808 -.090 -.939 .945 .92870 1.703 -. 077 -.815 .892 .86975 1.588 -.067 -.704 .835 .80680 1.468 -.058 -.606 .775 .74185 1.346 -.050 -.520 .714 .676
190 1.226 -. 043 -.445 .654 .613195 1109 -.038 -.380 .595 .553100 .998 -.033 -.324 .53 .496105 .894 -.029 -.276 .484 .443110 .797 -. 025 -.235 .434 .393115 .708 -. 022 -.200 .387 .348120 .626 -.020 -. 170 .344 .307125 .552 -.018 -. 144 .304 .270130 .485 -.016 -. 123 .268 .236135 .425 -.014 -. 104 .236 .207140 .371 -.012 -.039 .207 .10145 .323 -.011 -. 076 .181 .156
* 150 .281 -.010 -.064 .157 .136155 .244 -.009 -.055 .137 .117
* 160 .28 -.008 -.047 .119 .101" 165 .182 -.007 -.040 .103 .087
170 .157 -.007 -.034 .039 .075175 .135 -.006 -.029 .0077 .064180 .116 -. 005 -.025 .066 .055185 .100 -. 005 -.022 .057 .047190 .085 -.004 -.0019 .049 .040
' 195 .073 -. 004 -,016 .042 .034... 200 .062 -.004 -,014 .035 .029
205 .053 -*003 -.012 .030 4,025" 210 .045 -6003 -.010 .026 .021hr 215 .038 -. 003 -0009 .022 *018
220 .033 -.002 -. 008 .019 .015225 .023 -.002 -.007 .016 .013
+230 .023 --.002 -.006 .013 6011
38
I:

TABLE IV. cont'dtime u u TC IFCI FC
tie7 8 2
235 .020 -.002 -.005 .011 .009240 .017 -.002 -.004 .010 .008245 .014 -.001 -.004 .008 .006250 .012 -.001 -.003 .007 .005255 .010 -.001 -.003 -006 .005260 .008 -.001 -.002 *005 .004265 .007 -.001 -.002 .004 .003270 .006 -.001 -,002 .003 .003275 .005 -.001 -.002 .003 o002280 .004 -.001 -.001 .002 .002285 .004 -.001 -.001 .002 .002290 .003 -0001 -.001 .002 .001295 .002 -.001 -.001 .001 .001??
Note: This table of universal joint control torques andconstraint loads applies to the case of feedbackcontrol with the b2 momentum whe2l coupled.
P!3
* 4
.4V 39

TABLE V.
U time u1 u2 u3 u5 2
0 -1.732 -.066 .180 .000 .0005 --.960 -1.209 .182 .096 .005
10 -. 242 -1.906 .205 .157 .01615 .382 -2,296 ,238 .191 .03220 .893 -2.473 .269 .206 .05125 1.286 -2,504 .291 .207 .06930 1.566 -2,438 .301 .199 .08835 1.744 -2.311 .299 .184 .10540 1.832 -2.147 .287 .165 .12145 1,845 -1.964 ,268 .145 .13550 1,799 -1.777 .244 .123 .14855 1,706 -1.593 .218 .102 .15860 1.579 -1.418 *192 .082 .16665 1,430 -1.256 ,167 .062 .17370 1.267 -1108 o144 .045 .17875 1.098 -.974 *122 .028 .18180 .929 -.855 ,104 .014 .18385 .764 -,750 ,088 ,.001 .183
90 .607 -. 657 .074 -.010 .18395 .461 -.576 .062 -.019 .182100 .325 -o506 .052 -.028 .180105 .203 -,445 .044 -.035 .177110 .093 -. 392 .037 -.040 .173115 -:005 -:346 .032 -. 045 .169
S120 -. 090 -. 306 ,027 -,048 ,165
125 -,163 -.271 .023 -.051 .161-130 -.226 -,242 *020 -.053 .156135 -.278 -.216 .017 -.055 .151140 -. 322 -. 194 *015 -.056 .146145 -. 357 -. 174 .013 -.056 .141150 -.385 -. 157 .011 -.056 .136155 -.406 -.142 0010 -.056 .131160 -. 422 -,129 ,009 -.055 .126165 -.433 -. 118 .008 -.054 .121170 -.439 -. 108 ,007 -.053 .116175 -,441 -. 099 ,006 -.052 .11.1180 -.441 -.091 .006 -,051 .106185 -. 437 -.084 .005 -. 049 .102190 -. 432 -.077 .004 -. 048 .097195 -. 424 -. 072 .004 -.046 .093200 -.416 -.067 .004 -. 045 .089205 -.405 -,062 .003 -.043 .085210 -o394 -.058 .003 -. 041 081215 -. 383 -.054 .003 -,040 .077220 -.371 -o050 .002 -.038 .074225 -.358 -,047 ,002 -.037 .070230 -.345 -,044 .002 -,035 .067
40
4o

*. TABLE V. cont'd
time u1 u2 u3 u5 2
235 -.333 -.041 .002 -.034 .064240 -.320 -.039 .002 -.032 .061245 -.307 -.037 .001 -.031 .058250 -.295 -.035 .001 -.030 .055255 -.283 -.033 .001 -.028 .053260 -.271 -.031 .001 -.027 .050265 -.259 -.029 .001 -.026 .048270 -.248 -.027 .001 -.025 .046275 -.237 -.026 .001 -.023 .043280 -.226 -.024 .001 -.022 .041285 -.216 -.023 .001 -.021 .039290 -.206 -.022 .001 -.020 .037295 -.197 -.021 .001 -..019 .036
Note: This table of thruster torques u , u., and u andwheel torque u5 applies to the c lse bf feedbickcontrol with the b2 momentum wheel coupled.
A4
Sr.
K,41
I;

A4
TABLE VI.
Utime T~ I FC I F c7 8 2
0 -1,500 -*192 .021 .612 -.5005 -.830 -,281 -.471 .340 -.225
10 -. 403 -*314 -.738 .242 -.09415 -.201 -. 298 -.882 .223 -.071
20-.180 -.251 -.974 .237 -. 12425 -.285 -.192 -1,054 .288 -,22330 -.463 -. 136 -1.139 .379 -.346
35-.671 -.093 -1.231 .495 -647640 -0878 -.068 -1.323 .619 -.60245 -1.067 -o063 -1.402 .740 -t72150 -1.230 -.074 -1.454 .851 -.83155 -1.371 -.095 -1.470 .953 -,93660 -1.499 -.119 -1.444 1.051 -1,03865 -1.629 -. 139 -1.379 1.150 -1,14170 -1.771 -.151 -1.280 1.253 -1,24875 -1.933 -.151 -1.159 1.363 -1.35980 -2.119 -.141 -1.029 1.478 -1*47385 -2.322 -. 122 -.900 1.596 -1.58990 -2,537 -*099 -.784 1.712 -1,70495 -2.751 -.075 -.687 1.822 -1,813100 -2.954 -.054 -.612 1.922 -1,914105 -3.139 -.036 -.559 2.012 -2,003110 -3.300 -.024 -.524 2.088 -2.080115 -3.433 -.016 -.504 2.152 -2.143120 -3.541 -.011 -.492 2.204 -2.194125 -3.626 -.1010 -.483 2.245 -2.235130 -3.693 -.010 -.473 2.279 -2.268135 -31.746 -.010 -.458 2.306 -2.295140 -3o792 -.010 -.440 2.330 -2.318I145 -3.834 -.009 -.416 2.351 -2.338150 -3.873 -.008 -*391 2.371 -2.357155 -3.912 -,005 -.364 2.389 -2,375160 -3.950 -.003 -.340 2.407 -2.392165 -3,986 .000 -.318 2.423 -2.408170 -4,020 .003 -.301 2,437 -2.422175 -4.049 .005 -.288 2.449 -2.434180 -4.072 .006 -.280 2.45B -2.443185 -4.090 .007 -.276 2.465 -2.449190 -4.103 .007 -.274 2.469 -2.453195 -4.110 .006 -.273 2.471 -2.455200 -4.113 .006 -.272 2.471 -2.455205 -4.114 .005 -.271 2.470 -2.454210 -4.112 .004 -.269 2.469 -2.452215 -4.110 .003 -,266 2.466 -2.450220 -4.107 .003 -.262 2.464 -2,447225 -4.104 .003 -.258 2,461 -2.445230 -4,101 .003 -. 253 2,459 -2.442
42

TABLE VI. cont'd
time u u8 TC IFCI FC7 2
235 -4.099 .003 -.249 2.456 -2.440
240 -4.096 .003 -.246 2.453 -2.437245 -4.093 .003 -.243 2.450 -2.434250 -3.847 .003 -2.162 2.495 --2.284255 -3.192 .003 -1.813 2.072 -1.896260 -2.643 .004 -1.519 1.720 -1.572265 -2.194 .005 -1,276 1.432 -1.306270 -1.824 .005 -1.075 1.194 -1.087275 -1.519 .006 -.907 .998 -.906280 -1.267 .006 -.768 .836 -.757285 -1.059 .006 -.651 .702 -.634290 -.887 .006 -.553 .590 -.532295 -.743 .006 -.471 .497 -.446
Note: This table of universal joint control torques andconstraint loads applies to the case of feedbackwith control torques u7 and u only until t = 250seconds, at which time the complete control vectoru is fed back.
43
m t

TABLE VII.
time '01 W02 W 03 4
0 .000 .000 .102 .000 .0095 .001 .001 .102 -. 003 .008
10 .001 .002 .102 -.004 .00615 •000 .003 .102 -.004 .00520 -.001 .004 .102 -.003 .00425 -. 002 .004 .101 -.002 .00330 -. 004 .004 .101 -. 001 .00335 -. 005 .004 .101 .000 .00240 -.005 .003 .101 .000 .0045 .-.005 .002 .101 .000 .00250 -.005 .002 .101 -.001 .00155 -004 .001 .101 .-.002 .001
• 60 -. 003 .002 .101 -.003 .00165 -. 002 .002 .101 -.004 .00170 -.001 .003 .101 -. 004 .00075 .000 .004 .101 -.005 .000
0 80 .000 .005 .101 -. 004 -. 00185 .000 .006 .101 -. 004 -.00190 .000 .007 .101 -.004 -.00195 .000 .008 .101 -. 003 -. 001
100 -.001 .008 .101 -.002 --.002105 -.001 .009 .101 -.002 -. 002110 -.-#001 .009 .101 -. 001 -. 002115 -.001 .009 1101 -.001 -.002120 -.001 .009 .101 -. 001 -. 002
130 -.001 .009 .101 -. 001 -.002135 -.001 .009 .101 -. 001 -.002140 -.001 .009 .101 -. 001 -. 002
145 -.001 .009 .101 -.001 '-.002150 -. 001 .010 .101 -. 001 -. 002155 .000 .010 .101 -.001 -.002160 .000 .010 .101 -. 001 -.002
165 -.001 .010 .101 -. 001 -.001170 -. 001 .010 .101 .000 -. 001175 -.001 .010 .101 .000 .-.001
, 180 -. 001 .010 .101 .000 -. 001185 -.001 .010 .101 .000 -. 0011 -.001 .010 .101 .000 -.001195 -.001 .010 .101 .000 -.001200 -. 001 .010 .101 .000 -. 001
205 -.001 .010 .101 .000 -.001210 -.001 .010 .101 .000 -.001
C- 215 -.001 .010 .101 .000 -f001220 -. 001 .010 .101 .000 -. 001225 -1001 .010 .101 .000 -.001230 -. 001 .010 .101 .000 -. 001
44

TABLE VII. cont'd
time 01 02Y4235 00 .103 y5
235 -.001 .010 .101 .000 -.001' 240 '-.001 .010 .101 .000 -.001
' 245 -. 001 .010 .101 .000 -. 001
250 -.001 ,009 .101 .000 -.001255 .000 .008 .101 .000 -.001260 .000 .006 .101 1000 -.001265 .000 .005 .101 .000 -,001270 .000 .004 .101 .000 -.001275 .000 *003 .101 .000 -.001280 .000 .002 .101 .000 .000285 .000 .002 .101 .000 .000290 .000 .002 .101 .000 .000295 .000 .001 .101 .000 .000
NOTE: This table of OMV angular velocity components,target spin rate and precession angle rate ofchange is for the case of feedback with u7 andU 8 control vector components only, until
t = 250 seconds when control is with thecomplete u vector.
,45

V. Conclusion
A nonlinear feedback control law was developed and used to despin
and detumble an axially symmetric target satellite originally in steady
spin and precession. The control law derivation is based upon Liapunov
stability theory, and ensures the global asymptotic stability of the
final spin-stabilized equilibrium state. The results indicate that the
system is well behaved, in the sense that changes in both the system
state and in the control torques are smooth throughout the maneuver. The
control torque magnitudes are relatively small, and no extreme loading of
the connecting joint between OMV and target satellites occurred. The
system could be driven very close to the spin-stabilized state using the
joint control torques alone. However, a residual target precession angle
remained at the end of the 300 second maneuver, as did non-zero bI and b2
OMV velocity components. This is due to the fact that after approximately
200 seconds of feedback control, the matrix, A, of Eq (26) is nearly dia-
gonal, and as a result the control torques u7 and u8 are coupled strongly
only to the target precession angle rate and spin rate, and the precession
angle (states x7, x8, and x9), all of which have very small values. The
" available control torques at the universal joint are thus insufficient for
the reduction of target precession angle at any appreciable rate. Imple-
mentation of full vector control (using all eight control torques) at
t = 250 seconds successfully drove the system to the spin-stabilized
equilibrium.
Although the OtlY thrust torque magnitude could be reduced by
coupling a momentum wheel torque to the target precession angle, no at-
tempt was made to accomplish detumbling with momentum wneel and joint
46

torques alone. Any attempt made to couple the b3 momentum wheel with
system states x7 or x8 resulted in an increase in at least one thrust
torque profile, with no obvious positive influence on system behavior.
A follow on effort might concentrate on the development of a
reliable technique for determining the values of the off-diagonal gain
matrix terms, based on desired system response. Then an attempt could
be made to perform the bulk of the maneuver using only internal torques.
i.4
47-

References
1. Conway, B.A., and Widhalm, J.W., "Optimal Continuous Control forRemote Orbital Capture," AIAA J. of Guidance, Control, and Dynamics,to appear.
2. Fletcher, H.J., Rongved, L., and Yu, E.Y., "Dynamics Analysis of aTwo-Body Gravitationally Oriented Satellite," Bell System Tech. J.,Vol. 42, No. 5 (1963) 2239-2266.
3. Hooker, W.W., and Margulies, G., "The Dynamical Attitude Equationsfor an n-Body Satellite," J. of the Astronautical Scietices, Vol. 12,No. 4 (Winter, 1965) 123-178.
4. Hooker, W.W, "A Set of r Dynamical Attitude Equations for an Arbitraryn-Body Satellite Having r Rotational Degrees of Freedom," AIAA J.,Vol. 8, No. 7 (1970) 1205-1207.
5. Conway, B.A., and Widhalm, J.W., "Equations of Attitude Motion for ann-Body Satellite With Moving Joints," AIAA J. of Guidance, Control,and Dynamics, Vol. 8, No.4 (1985) 537-33 -_g.
6. Greenwood, D.T., Principles of Dynamics. Prentice-Hall, Inc.,Englewood CliffsNJ,1965.
7. Widhalm, J.W., and Conway, B.A., "Nonlinear Feedback Control forRemote Orbital Capture," paper No. AAS85-368 presented at AAS/AIAAAstrodynamics Specialist Conference. AAS Publications Office,PO Box 28130, San Diego, CA (August 1985).
8. Vidyasagar, M., Nonlinear Systems Analysis. Prentice-Hall, Inc.,Englewood Cliffs,1lFTM._
9. Widhalm, J.W., "Optimal Open Loop and Nonlinear Feedback Control forRemote Orbital Capture,"1 1.D7Thess, University of Ilinois at-rbana-champaign,--T85.
48
, . .. ... , , * N , , A •. A,

S.
VITA
Lieutenant Kirk R. Fleming was born on 13 October 1954 in Port
Huron, Michigan. He graduated from Port Huron Northern High School in
January 1972, and attended the University of Texas at Austin from Aug-
ust 1979 to December 1981, when he received the degree of Bachelor of
Science in Aerospace Engineering. He received a commission in the
USAF through the Air Force Officer Training School in April 1982. He
then served as a research and development project engineer in the Air
Force Flight Dynamics Laboratory, Vehicle Equipment Division, Wright-
Patterson AFB, Ohio until entering the School of Engineering, Air Force
Institute of Technology, in May 1984.
Permanent address :1954 Burns Road
Smith's Creek, MI 48074
4-
,9
49

&4 UNCLASSIFIED
SECURITY CLASSIFICATION OF THIS PAGE
REPORT DOCUMENTATION PAGEIii. REPORT SECURITY CLASSIFICATION 1b. RESTRICTIVE MARKINGS
2a. SECURITY CLASSIFICATION AUTHORITY 3. OISTRIBUTION/AVAILABILITY OF REPORT
Approved for public release;2b. OECLASSIF ICATION/OOWNGRADING SCHEDULE
Distribution unlimited-- 4. PERFORMING ORGANIZATION REPORT NUMBER(S) S. MONITORING ORGANIZATION REPORT NUMBERISI
AF IT/GA/AA/85D-5
*G&. NAME OF PERFORMING ORGANIZATION b. OFFICE SYMBOL 7a. NAME OF MONITORING ORGANIZATIONSchool of Engineering (it appicable)
*AFIT Ib DRS Ct.Stt n I oe6.ADDRESS (City. State and ZIP Code) 7.ADES(iy tt n I oe
Air Force Institute of TechnologyWright-Patterson AFB, OH 45433
go. NAME OF FUNDING/SPONSORING 8b. OFFICE SYMBOL 9. PROCUREMENT INSTRUMENT IDENTIFICATION NUMBERORGANIZATION(iaplcbe
8 c. ADDRESS (City, State and ZIP Code) 10. SOU)RCE OF FUNDING NOS.
* A PROGRAM PROJECT TASK WORK UNITELEMENT NO. NO. NO. NO.
4 11. TITLE (Include Security CIluuafication)
See block 19 ______ _______________
12. PERSONAL AUTHOR(S)L Fleming Kirk R.. 1Lt, USAF5.PGCON13AL TYPE OF REPORT 13b. TIME COVERED 14.10 TE OF REPORT Yr. Mo.. Day) 1.PGCON
MS Thesis FROM _ TO D___ Jec 85 5916. SUPPLEMENTARY NOTATION
17. COSATI CODES 18. SUBJECT TERMS (Continue on revierse it necessary and Identify by block number)
FIELD GROUP SUB.OR. satellite, dynamics, teleoperator, orbital capture22 02docking, detumbling, despinning, feedback control
19. ABSTRACT (Continue on reverse if neceseary and identify by block number)
Title: THE DETUMBLING OF AN AXIALLY SYMMETRIC SATELLITE WITH AN
ORBITAL MANEUVERING VEHICLE BY NONLINEAR FEEDBACK CONTROL
Theis dvior:Lt. Co.Joseph .ihl
Deam01 1011 Aeear0cI and Prf ind I. beg 9nAir Weeom Iammge @Ifcat (~A M-WdOW410ftom &" oil 4M
20. DISTRIBUTION/AVAILABILITY OF ABSTRACT 21. ABSTRACT SECURITY CLASSIFICATION
UNCLASSIFIED/UNLIMITED ZSAME AS RPT. 0 OTIC USERS C UNCLASSIFIED224L NAME OF RESPONSIBLE INDIVIDUAL 22b. TELEPHONE NUMBER 22c. OFFICE SYMBOL
Lt. ol. oseh W Widalm(include A ra Code)
Lt.Cal JoephW. idhl.(513) 255-5533 AFIT/ENY
00 FORM 1473, 83 APR EDITION OP I JAN 73 IS OBSOLETE. UNCLASSIIEDSECURITY CLASSIFICATION OF THIS PAGE
_ N' ~

UNCLASSIFIED
SECURITY CLASSIFICATION OF THIS PAGE
From Block 19:
The problem of detumbling a freely spinning and precessing 1axially symmetric satellite is considered. Detumbling is achieved jwith another axisymmetric orbital maneuvering vehicle (OMV) joined
to the target satellite with a universal joint. The joint provides
two rotational degrees of freedom and is translated across the sur-
face of the OMV during the detumbling process. The target satellite
and the OMV with its three momentum wheels are modelled as a five
body system using Eulerian-based equations of motion developed by
* Hooker and Margulies. A Liapunov technique is applied to derive a
nonlinear feedback control law which drives the system asymptotically
to a final spin-stabilized state. State and control histories are
presented and indicate that the detumbling process is benign. Con-
straint force and moment loads at the connection between the OMV and
target satellites are also presented, and indicate that no extreme
loads are encountered during the debpinning and detumbling process.
S!
! ?.
.4
~SICUAITY CLASIICATION O THIS AGE

~
-[IC