The Croaker: a physical model and a Lego controllerich/research/misc/papers/cr1188.pdf · 2005. 9....
4
THE CROAKER: A PHYSICAL MODEL AND A LEGO CONTROLLER Stefania Serafin and Amalia De Goetzen Medialogy Aalborg University Copenhagen Lautrupvang 15, 2750 Ballerup, DK e-mail: sts, [email protected] ABSTRACT Physical models of different Intonarumori, musical instruments invented by the Italian Futurist composer Luigi Russolo, are proposed. The acoustics of the in- struments is described, and a physical model to simu- late such instruments is proposed. We also introduce the Croaker, a new interface made with Lego which is inspired by Russolo’s original instruments. 1. INTRODUCTION The Intonarumori (noise intoners) were a family of musical instruments invented in 1913 by the Italian Futurist composer and painter Luigi Russolo. Each in- strument was made of a parallelepiped sound box with a speaker on its front. Inside the box, a gut or metal string was excited by a rotating wheel. The speed of the wheel was changed by the performer using a crank, while the tension of the string was varied by using a lever. Such instruments were acoustic noise genera- tors that permitted to create and control several differ- ent types of noisy sonorities. According to Russolo, the Intonarumori created different kinds of everyday sounds, from rumbles to screeches. The Intonarumori were a consequence of Russolo’s theories regarding the structure of the futuristic or- chestra. With the belief that the traditional orchestra needed some new sonorites, in his manifesto “The Art of Noises” [7], Russolo proposed a taxonomy of noise sounds with six families of noises, divided as follows: 1. Rumbles, roars, explosions, crashes, splashes and booms. 2. Whistles, hisses and snorts. 3. Whispers, murmers, mumbles, grumbles and gur- gles. 4. Screeches, creaks, rustles, buzzes, crackles and scrapes. 5. Noise made by percussion on metal, wood, skin, stone, etc. 6. Voices of animal and man: shouts, screams, groans, shrieks, howls, laughs, wheezes and sobs. The 27 variety of Intonarumori built by Russolo and his colleagues aimed at simulating such variety of noises. The different names of the instruments were created according to the sound produced: howling, thunder, crackling, crumpling, exploding, gurgling, buzzing, hissing and so on. Figure 1. Different Intonarumori as shown in the ex- position Sounds and Lights, Paris, Pompidou Center, December 2004. During World War II, all the original Intonarumori got destroyed. Several attempts to rebuild such instru- ments were made. Among them, the ones shown in Figure 1 are some reproductions recently shown at the exposition Sounds and Lights at the Pompidou Center in Paris. In this paper, we propose physical models of the different Intonarumori, which work in real-time in the Max/MSP 1 platform and allow to reproduce and ex- 1 www.cycling74.com
Transcript of The Croaker: a physical model and a Lego controllerich/research/misc/papers/cr1188.pdf · 2005. 9....
-
THE CROAKER: A PHYSICAL MODEL AND A LEGOCONTROLLER
Stefania Serafin and Amalia De GoetzenMedialogy
Aalborg University CopenhagenLautrupvang 15, 2750 Ballerup, DK
e-mail: sts, [email protected]
ABSTRACT
Physical models of different Intonarumori, musicalinstruments invented by the Italian Futurist composerLuigi Russolo, are proposed. The acoustics of the in-struments is described, and a physical model to simu-late such instruments is proposed. We also introducethe Croaker, a new interface made with Lego which isinspired by Russolo’s original instruments.
1. INTRODUCTION
The Intonarumori (noise intoners) were a family ofmusical instruments invented in 1913 by the ItalianFuturist composer and painter Luigi Russolo. Each in-strument was made of a parallelepiped sound box witha speaker on its front. Inside the box, a gut or metalstring was excited by a rotating wheel. The speed ofthe wheel was changed by the performer using a crank,while the tension of the string was varied by using alever. Such instruments were acoustic noise genera-tors that permitted to create and control several differ-ent types of noisy sonorities. According to Russolo,the Intonarumori created different kinds of everydaysounds, from rumbles to screeches.
The Intonarumori were a consequence of Russolo’stheories regarding the structure of the futuristic or-chestra. With the belief that the traditional orchestraneeded some new sonorites, in his manifesto “The Artof Noises” [7], Russolo proposed a taxonomy of noisesounds with six families of noises, divided as follows:
1. Rumbles, roars, explosions, crashes, splashesand booms.
2. Whistles, hisses and snorts.
3. Whispers, murmers, mumbles, grumbles and gur-gles.
4. Screeches, creaks, rustles, buzzes, crackles andscrapes.
5. Noise made by percussion on metal, wood, skin,stone, etc.
6. Voices of animal and man: shouts, screams, groans,shrieks, howls, laughs, wheezes and sobs.
The 27 variety of Intonarumori built by Russoloand his colleagues aimed at simulating such variety ofnoises. The different names of the instruments werecreated according to the sound produced: howling,thunder, crackling, crumpling, exploding, gurgling, buzzing,hissing and so on.
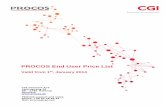
Figure 1. Different Intonarumori as shown in the ex-position Sounds and Lights, Paris, Pompidou Center,December 2004.
During World War II, all the original Intonarumorigot destroyed. Several attempts to rebuild such instru-ments were made. Among them, the ones shown inFigure 1 are some reproductions recently shown at theexposition Sounds and Lights at the Pompidou Centerin Paris.
In this paper, we propose physical models of thedifferent Intonarumori, which work in real-time in theMax/MSP 1 platform and allow to reproduce and ex-
1 www.cycling74.com
-
tend the everyday sonorities created by Russolo ’s ma-chines. We start by describing the acoustics of the in-struments, and then we propose a physical model tosimulate them as well as a new interface to control themodels.
2. RUSSOLO’S INTONARUMORI
As seen in Figure 1, the external appearance of eachIntonarumori is similar. Each instrument is made ofa sound box with a speaker attached at one extremity.The different timbres of the instruments are mainly doto the excitation mechanism. One end of the stringis fixed to the middle of a membrane stretched insidea medium-sized drum, on the other side of which aradiating horn is mounted.
To play the instruments, the performer turned a crankor pressed an electric button which produced the soundwhose frequency was controlled by means of a leveron top of the box. The lever could be moved over ascale in tones, semitones and the intermediate grada-tions within a range of more than an octave.
In the gracidatore (the Croaker), whose excitationmechanism is shown in Figure 2, the shape of the ro-tating wheel allows to obtain plucking sounds.
In the Crepitatore (the Crackler), shown in Figure 3,the excitation mechanism is a metal wheel, and twolevers are present, as well as two vibrating strings. Inthe Ululatore (Howler), described by Russolo as ”soft,velvety and delicate”, the excitation mechanism was ametal wheel, as shown in Figure 4.
VIBRATING STRING
EXCITATION MECHANISM
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 104
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Time (samples)
Amplitud
e
Figure 2. The excitation mechanism of the Gracida-tore (top) and a time domain waveform for one secondof sound (bottom).
RADIATING HORN
LEVER 1 LEVER 2
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 104
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Time (samples)
Amplitud
e
Figure 3. Reproduction of the Crepitatore. In this in-strument, two levers are present. Bottom: time domainwaveform.
3. MODELING THE INTONARUMORI
3.1. Modeling the vibrating string
The approach chosen to simulate different Intonaru-mori relies on the decomposition of a vibrating sys-tem into excitation and resonator. The exciting objectis modeled as a lumped mechanical system, using amodal description, while the string is modeled usinga one dimensional waveguide [8]. Losses along thestring and at the extremities are lumped into a low-pass filter. The string is simulated by using a delayline of fractional length [6]. The possibility of chang-ing the tension of the string (which affects the value ofthe fundamental frequency and allows to obtain glis-sando and pitch shifting) is obtained by continuouslyvarying the length of the delay line. Moreover, thestring has a high inharmonicity factor, simulated byusing six allpass filters in cascade.
The string is excited by either by a transient ex-citation (such as in the case of the Gracidatore) or asustained excitation (like in the Crepidatore). Suchmechanisms are described in the following.
3.2. Modeling the excitation mechanism
3.2.1. Transient excitation
In order to simulate a transient excitation between thevibrating wheel and the string, a model of a pluckedexcitation mechanism such as the one described in [8]is adopted. The transient excitation in the Intonaru-mori acts as a highly inharmonic plucked string, andthe frequency of plucking is given by the rotational
-
EXCITATION MECHANISM
VIBRATING STRING
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 104
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Time (samples)
Amplitud
e
Figure 4. The excitation mechanism of the Ululatore(top) and the representation of its time domain wave-form (bottom).
Inputexcitation
Loss filter
1D waveguidehorn
radiation
3D mesh
Dispersionfilters
Tensionmod. filter
Figure 5. Structure of the physical model of an in-tonarumori. The input excitation allows the stringto vibrate. The resonances of the string are filteredthrough the soundbox model and the horn resonator,before being heard by the listener.
speed of the wheel multiplied by the number of bumpspresent in the wheel itself.
3.2.2. Sustained excitation
To model the sustained excitation between the rotatingwheel and the string, the elasto-plastic friction modelproposed in [4], and already adopted for sound syn-thesis purposes in [2], is used. The idea behind thismodeling approach is that at contact point objects ex-hibit a random bristle behavior.
We in fact deal with the average deflection of thebristles. The total displacement of the two slidingsurfaces is considered as the sum of the two parts:an elastic displacement, which represents the averagebristle deflection, and a plastic displacement, whichrepresents slipping. There is a breakaway displace-ment such that displacements less than this amount donot involve a plastic displacement. Above the break-
away displacement, the model incorporate a smoothtransition from purely plastic to purely elastic behav-ior. The class of elasto-plastic models proposed byDupont and colleagues can be described by the equa-tions
ż = fNL(v,z)v[
1−α(z,v) zzss(v)
], ż = v− |v|
g(v)z ,
(1)
f f = σ0z+σ1ż+σ2v, (2)where z is the average bristle deflection, v is the rela-tive velocity between the two surfaces, σ0 is the stiff-ness of the bristles, σ1 is the bristle damping, σ2v ac-counts for linear viscous friction, and f f is the result-ing friction force.
The auxiliary functions α and zss can be parametrizedin various ways, suggested in [4].
The elasto-plastic friction model is used in the sim-ulations since it produces more realistic transients.
3.3. Connecting the exciter and resonator
When connecting the modal exciter to the waveguideresonator through a nonlinear interaction, the resultingsystem exhibits computational problems since a delayfree path is generated. As shown in [3], and efficientsolution is given by the so-called K-method.
3.4. Modeling the sound box
The sound box is simulated by using a three dimen-sional waveguide mesh [9]. The dimensions of themesh are chosen to match those of a parallelepipedalbox of the original Intonarumori. The vibrating string,together with the excitation mechanism, are placed in-side the 3D mesh, as shown in Figure 5. This meansthat an accurate simulation of the Intonarumori re-quires a physical model (the string, either plucked orrubbed) inside another physical model (the sound box).From a physical point of view, the wooden sound boxacts as a small reverberator for the sound produced in-side the Intonarumori.
3.5. Modeling the radiating horn
As a final component of the Intonarumori, a radiatinghorn is attached to one extremity, in order to amplifythe sonorities produced inside the box. We simulatethe horn by using one bandpass filter with a high band-width, connected to the waveguide mesh resonator asshown in Figure 5.
4. CONNECTING ALL TOGETHER
The different components of the model are connectedas shown in Figure 5.
-
The model has been implemented as an extensionto the Max/MSP environment. In the Intonarumori de-scribed above, and in the virtual ones too, the con-trol parameters of the instruments are the type of ex-citation mechanism (plucked or rubbed), which cor-responds to the simulation of different instruments ofthe family, the angular velocity of the rotating wheel,controlled by the player, and the string tension, whichcorresponds to moving the lever on top of the instru-ment.
5. THE CROAKER: CONTROLLING THEINTONARUMORI
In the original Intonarumori, the control parametersgiven to player are the speed of the rotating crank andthe position of the lever. In order to build an inter-face with the same control parameters we designedthe Croaker, a new interface shown in Figure 6. TheCroaker is an interface made with Lego blocks and en-hanced with sensors. One potentiometer tracks the ro-tation of the crank, while another potentiometer con-trols the position of the moving lever. The Croakerwas designed with two main purposes: on one end,we wanted to build an interface to control the physicalmodels described in the previous section. On the otherend, we wanted to design a new interface for musicalexpression.
Figure 6. The Croaker: a new interface enhancedwith sensors used to control the Intonarumori physicalmodels.
6. CONCLUSION
In this paper we propose a real-time physical model ofsome instruments of the Intonarumori family. We alsointroduced the Croaker, a new interface inspired bythe Intonarumori. Such computer simulation is usefulboth from a physical perspectives, to comprehend if
the sound production mechanism of such instrumentshas been understood, and to provide a real-time sim-ulation of everyday noise sounds. We are currentlyusing the Croaker as a controller for audio-visual sim-ulations, to investigate in the sound domain some es-tablished HCI laws such as Fitts’ laws and steeringlaws [5].
6.1. Acknowledgments
The author wishes to thank Federico Avanzini, Fed-erico Fontana and Davide Rocchesso for previous col-laborations on developing the models used in this pa-per.
7. REFERENCES
[1] F. Avanzini, S. Serafin, D. Rocchesso. Model-ing Interactions between Rubbed Dry SurfacesUsing an Elasto-Plastic Friction Model. Proc.DAFX 2002, Hamburg, Germany.
[2] G. Borin, G. De Poli and D. Rocchesso. Elimina-tion of delay-free loops in discrete-time modelsof nonlinear acoustic systems. Speech and Au-dio Processing, IEEE Transactions on ,Volume:8 , Issue: 5 , Sept. 2000 Pages:597 - 605.
[3] P. Dupont, V. Hayward, B. Armstrong and F. Alt-peter (2002). ”Single State Elasto-Plastic Fric-tion Models,” IEEE Transactions on AutomaticControl, Vol. 47, No. 5, pp. 787-792.
[4] P.M. Fitts. (1954). The information capacity ofthe human motor system in controlling the am-plitude of movement. Journal of ExperimentalPsychology, 47, 381-391.
[5] Laakso, T. I., Valimaki, V., Karjalainen, M., andLaine, U. K. 1996. Splitting the unit delay-toolsfor fractional delay filter design. IEEE SignalProcessing Magazine, vol. 13, no. 1, pp. 30-60.
[6] L. Russolo. L’arte dei rumori (The Art of Noise).Edizioni Futuriste di Poesia, 1916.
[7] Smith, Julius O. Physical Audio Signal Process-ing: Digital Waveguide Modeling of Musical In-struments and Audio Effects, August 2004 Draft,Center for Computer Research in Music andAcoustics (CCRMA), Stanford University.
[8] S. Van Duyne and J.O. Smith. Physical modelingwith the 2D waveguide mesh. In Proc. Int. Com-puter Music Conf. (ICMC’93), pages 40–47.
IndexICMC 2005
Conference InfoWelcome MessagesSponsorsCommitteesProgram Guide
SessionsMonday 5, September 2005MonAmOR1-Paper Session 1: FrameworksMonAmPO1-Demo Session 1MonAmOR2-Paper Session 2: History of Electroacoustic Mu ...MonAmPO2-Poster Introduction SessionMonAmPO3-Demo Session 2MonPmOR1-Paper Session 3: Automatic Performance Renderi ...MonPmOR2-Studio reportsMonPmPO1-Demo Session 3MonPmOR3-Paper Session 4: Sound Synthesis and AnalysisMonPmPO2-Demo Session 4
Tuesday 6, September 2005TueAmOR1-Paper Session 1: Sound Synthesis and AnalysisTueAmPO1-Demo Session 1TueAmOR2-Paper Session 2: Music Analysis and Representa ...TueAmPO2-Poster Introduction SessionTueAmPO3-Demo Session 2TuePmOR1-Paper Session 3: Mathematical Music TheoryTuePmPO1-Demo Session 3
Wednesday 7, September 2005WedAmOR1-Paper Session 1: Sound Synthesis and AnalysisWedAmPO1-Demo Session 1WedAmOR2-Paper Session 2: PsychoacousticsWedAmPO2-Poster Introduction SessionWedAmPO3-Demo Session 2WedPmOR1-Paper Session 3: Systems for Composition and M ...WedPmOR2-Studio reportsWedPmPO1-Demo Session 3WedPmOR3-Paper Session 4: Sound Processing and Synthesi ...WedPmPO2-Demo Session 4
Thursday 8, September 2005ThuAmOR1-Paper Session 1: Music Information Retrieval a ...ThuAmOR2-Paper Session 2: PerformanceThuAmPO1-Poster Introduction SessionThuAmPO2-Demo Session 2ThuPmOR1-Paper Session 3: Interactive MusicThuPmOR2-Studio reportsThuPmPO1-Demo Session 3ThuPmOR3-Paper Session 4: General Computer Music TopicsThuPmPO2-Demo Session 4
Friday 9, September 2005FriAmOR1-Paper Session 1: Composition SystemsFriAmOR2-Paper Session 2: Composition SystemsFriAmPO1-Poster Introduction SessionFriAmPO2-Demo Session 2FriPmOR1-Paper Session 3: Sound Synthesis and AnalysisFriPmPO1-Demo Session 3FriPmOR2-Paper Session 4: PerformanceFriPmPO2-Demo Session 4
AuthorsAll authorsABCDEFGHIJKLMNOPRSTUVWXYZ
PapersPapers by SessionAll papersPapers by Topic
TopicsDigital Audio Signal ProcessingSound Synthesis and AnalysisMusic AnalysisMusic Information RetrievalRepresentation and Models for Computer MusicArtificial Intelligence and MusicLanguages for Computer MusicMathematical Music TheoryPsychoacoustics, Music Perception and CognitionAcoustics of MusicAesthetics, Philosophy and Criticism of MusicHistory of Electroacoustic MusicComputer Systems in Music EducationComposition Systems and TechniquesInteractive Performance SystemsSoftware and Hardware SystemsGeneral and Miscellaneous Issues in Computer MusicStudio Reports
SearchHelpBrowsing the Conference ContentThe Search FunctionalityAcrobat Query LanguageUsing Acrobat ReaderConfigurations and Limitations
AboutCurrent paperPresentation sessionAbstractAuthorsStefania Serafin