The convergence of a specialized iterative process in use ... · 1) These methods originate from an...
11
Applied Mechanics. - The convergence of a specialized iterative process in use in structurai analysis. By C. B. BIEZENO and O. BOTTEMA. (Communicated at the meeting of April 27, 1946.) 1. Int.roduction. In recent years so-called "relaxation" -methods have been developed which have completely altered the treatment of a great number of technically important structures , such as redundant girders, redundant frame works , trusses of "Vierendeel" -construction etc. 1) All of them are iterative methods , the convergence of which - if at all considered - is generally discussed from the energetic point of view 2) . The iterative method , under consideration here , will be investigàted in a different way . It restricts itself to such two-dimensional frameworks the joints of which are only liable to rotations, and for the rest are fixe·d in space. The joints of the frame work may be denoted by Ai (i = I , 2 ... n); the length of the member joining the points Ai and A j may be indicated by iii = i i i and it may be prearranged by definition th at ii i = 0 if the points Ai and A i -- are unconnected and that - in agreement with this definition - iii = O. If the structure is loaded it will be brought into its "naturaI" state of stress and all joints Ai will rotate. If the rotations are prevented by suitable moments Mi applied to the joints Ai, the construction will be said to be "locked". It is supposed that the state of stress can easily be calculated for this fully "locked " structure . Then the problem to be solved consists in calculating all stress es which occur if the structure is "unlocked". It is th is unlocking of the structure which is effectuated in degrees and in an iterative way . The locking moments, which prevail after the k' th iteration will be designated by Mi (k) . The procedure of iteration once being fixed, it is our aim to show that all locking moments Mi (k) (i = 1, 2 .. . n) tend to zero if k tends to infinity: Obviously it must be required for the sake of practical applicability that th is procedure of iteration be such that the change in state of stress , implicated by one single iterat ion, can easily be calculated. 2. The iterative method. Let the iteration be carried out k times, so that the locking moments are Mi (k) (i = 1. 2 .. . n) and let the joint Ai alone be unlocked. Then Ai must be loaded with - M;( k) . All joints connected with Ai will be influenced by this unloading in a way which depends upon the distribution of -M;(k) over all members by which Ai 1) These methods originate from an article by HARDY CROSS. Analysis of Continuous Frames by Distributing Fixed- End Moments. Proc. Amer. Soc. C.E. 96, 1-156 (1932), and have been developed mainly by R. V. SouthwelI and his' disciples; comp. R. V. SouthwelI, Relaxation Methods in Engineering Science; a treatise on approximate computa- tion, Oxford University Pre ss 1940. 2) See f.L G. TEMPLE, The general theory of relaxation-methods applied to linear systems. Proc. Royal Soc. of London, Vol. CLXIX. 1939.
Transcript of The convergence of a specialized iterative process in use ... · 1) These methods originate from an...
-
Applied Mechanics. - The convergence of a specialized iterative process in use in structurai analysis. By C. B. BIEZENO and O. BOTTEMA.
(Communicated at the meeting of April 27, 1946.)
1. Int.roduction. In recent years so-called " relaxation"-methods have been developed which have completely altered the treatment of a great number of technically important structures, such as redundant girders, redundant frame works, trusses of "Vierendeel"-construction etc. 1)
All of them are iterative methods, the convergence of which - if at all considered - is generally discussed from the energetic point of view 2) . The iterative method, under consideration here, will be investigàted in a different way. It restricts itself to such two-dimensional frameworks the joints of which are only liable to rotations, and for the rest are fixe·d in space. The joints of the frame work may be denoted by Ai (i = I , 2 ... n); the length of the member joining the points Ai and A j may be indicated by ii i = i i i and it may be prearranged by definition th at ii i = 0 if the points Ai and A i-- are unconnected and that - in agreement with this definition - iii = O.
If the structure is loaded it will be brought into its "naturaI" state of stress and all joints Ai will rotate. If the rotations are prevented by suitable moments Mi applied to the joints Ai, the construction will be said to be "locked" . It is supposed that the state of stress can easily be calculated for this fully "locked" structure. Then the problem to be solved consists in calculating all stress es which occur if the structure is "unlocked". It is th is unlocking of the structure which is effectuated in degrees and in an iterative way. The locking moments, which prevail after the k'th iteration will be designated by Mi (k) . The procedure of iteration once being fixed , it is our aim to show that all locking moments M i (k) (i = 1, 2 .. . n) tend to zero if k tends to infinity: Obviously it must be required for the sake of practical applicability that th is procedure of iteration be such that the change in state of stress, implicated by one single iteration, can easily be calculated.
2. The iterative method. Let the iteration be carried out k times, so that the locking moments are Mi (k) (i = 1. 2 .. . n) and let the joint Ai alone be unlocked. Then Ai must be loaded with - M;( k) . All joints connected with Ai will be influenced by this unloading in a way which depends upon the distribution of -M;(k) over all members by which Ai
1) These methods originate from an article by HARDY CROSS. Analysis of Continuous Frames by Distributing Fixed-End Moments. Proc. Amer. Soc. C.E. 96, 1-156 (1932), and have been developed mainly by R. V. SouthwelI and his' disciples; comp. R. V. SouthwelI, Relaxation Methods in Engineering Science; a treatise on approximate computa-tion, Oxford University Pre ss 1940.
2) See f.L G. TEMPLE, The general theory of relaxation-methods applied to linear systems. Proc. Royal Soc. of London, Vol. CLXIX. 1939.
-
490
is connected with other joints Aj. This distribution can be described by attributing to every member AiA j a certain '.' elastic weight" ai j which will be specified later on. The portion of -M;(k) for which the member AiAj stands, will th en be represented by
-~M;{k) (1) l: a ih h
(wh ere the summation over h may be extended over all values h = 1,2 ... n, if only aih is put equal to zero for every h for which lih = 0) .
The "extra" locking-moment, caused by the unlocking of Ai, depends solely on the elastic properties of the member AiA j and can be calculated by introducing the so-called "coefficient of transition" {3i j (which again will be specified later on); it then becomes
_ {3ij aij Mi (k) . (2) l: aih h
IE the liquidation of the moments Mi (k) is supposed to take place simul-taneously for all joints Ai, it is evident that at the point Ai the moment Mi (k) vanished, but is replaced by a moment Mi (k + 1) represented by
M;{k + 1) = -1:{3~ ajl M j (k) (1 = L 2 ... n) . . (3) j ,.,;.,ajh
h
The system (3) is the analytical representation of the iterative method proposed in th is paper.
By putting
. (4)
it is reduced to the system:
Ni (k + 1). Zaij = -1:{3ji aji'Nj (k) j j
(i = 1, 2 ... n) . (5)
3. The coefficients aij and {3ij. To calculate the coefficients aij and {3i j, introduced in the preceding section, we want to know what happens if the structure is loaded by a 'moment Mi at Ai, whilst all other joints A j (j =j:- i) are locked. To this end we consider the member A ij (fig. 1).
A--A----r---~A~M .. ') IJ
X )(
Fig. I.
-
491
clamped at Aj. freely supported at Ai. and 10aded by its share Mij of Mi-H. for abbreviation. we put
(6)
(where EI represents the 10cal bending rigidity of the member). the reaction X is determined by the equation
Mij Sij-Xlij =0
(expressing that the deflection at Ai is zero) . a-nd'tlte rotation cpi j at Ai by
Fij lij-S;j CP ij = Mij Fi-X Sij = Mij ·--l~, ~, -- = Mij: aij.
IJ
Obviously all members lih by which Ai is connected with other joints Ah. will suffer the same rotation cpi if Ai is 10aded by the moment Mi (whilst all other joints remain fixed) and therefore we have
2:Mih _M_I_' _ _ M_I_'k = . . . _ ..c-h'-----_
}; aih h
from which it follows that
The quantity
lij aij = - ------2~ F ij lij-Sij
(7)
dehned by (6) therefore is identical with the quantity ai j introduced in sect. 2. As to {Jij. the equilibrium of the member AiAj (comp. fig . I) requires a clamping moment at A j of the magnitude
X [ ,-M" _l!l§ij-lij IJ IJ - lij
so that
(8)
It follows from (6) th at ai j > O. {Jij> O. and furthermore that F ji = F ij ; Sji = lij Fij-Sij lji = l;j F ij-21ij Si} + lij. (9)
3) It may be stated that the coefficients ai j have nothing to do with the influence coefficients of MAXWELL. which ordinarily are denoted in the same way. and to which reference will be made in sect, 7.
-
Consequendy
With
and
we therefore have
492
F lj Ilj-S7j = Fji Iji-S]i . lij Sij-lij = Ijl Sji-Iji .
- I R - (Jij aij - rij ij ; t'ij - -I , , . IJ
whereas - with due regard to (9). (12) and (13)
1/, h '_(J2j = _1_ > 0 J J 1 rij
(10)
(11 )
. . (12)
· (13)
(14)
(15)
(16)
4. T he solution of the equations (5) . With the new notations and with
. . . (17)
the equations (5) become
Bi N;(k + 1) + ~ (Jij rij N j (k) = 0 (l = 1. 2 .. . n) . . (18) j
In the usual way we put
Ni (k) = Cl flk · (19) by which the system (18) is replaced by the n homogeneous linear equations in C;
flBiCi+I:dijrijCj=O (l=1.2 ... n). j
admitting a solution, different from zero, only if:
· (20)
= O. . (21)
The determinant Dn(fl) i'S symmetrieal, and therefore all roots (fll 'I!l2 . .. fln) of (21) are real , if not necessarily different. Should a p~fold root exist , then the system (20) is reduced toa system of (n-p) Iinearly independent
-
493
equatians which admit a system af p linearly independent salutians. In accardance herewith . the general salution af (18) is given by
Ni (k) = 1: as Cs,u~ . (22) as (s = 1. 2 ... n) denating integratian~canstants computable from the initial values Md 0 ) (i = I, 2 ... n). Equations (4 )and (22) pravide us with the farmal means ta evaluate the lacking maments Md k); required af ter the k'th iteratian. It must, hawever, be emphasized that the praper aim af the iteratian method lies in the avoidance af this calculatian, and that the practical camputation af the successive sets af quantities Md k) takes place by making use af the "caefficients af distributian" aij, and the "caefficients of transition" {Jij .
Nevertheless eq. 22 pravides us with the criterium of canvergence of the iteration methods, which obviously consists in the conditian that
l,us I < I , (s = 1. 2 ... n) . . . (23) 5. The convergence of the iteration process. It will now be shawn
that the condition (23) is always fulfilled. Ta ·this end we draw aur attention ta one single raat ,u and the correspanding (nan zero) ~salution Cs(i= 1, 2 ... n). H, for simplicity's sake Cs is replaced by Qi(i= I, 2 .. , n) the following relatians hold:
,us Bi Qi+:l:lJij"/ij Qj=O (i=1.2 ... n). (24)
from which we deduce:
On account of (18) th is relatian can be transformed inta:
(,us-I) :l: Bi Q~ + t :l:"/ij (lij Q~ + 2/Jij Qi Qj + I ji Q~j) = 0. · (26) i · ij
The quadratic function
lij Q~ + 2 /Jij Qi Qj +'lji Qj . (27) being positive~definite (camp. 16) ,and cansequently the second sum at the lefthand side of (26) being essentially pasitive, it is obvious that (,us - 1) is negative and therefare
,us < 1 . . (28) At the other hand (25) can alsa be written as:
(,us + 1) 1: Bi Q~-t 1:"/ij (lij Q~-2 /Jij Qi Qf + I ji Q;) = 0 (29) i ij
fIam which analogously it fallaws, that
,us> - 1 (30)
-
494
6. The upper limit of fis . Narrower limits can be given for fi s by introducing the quantity
2 2 _ (Jij _ (Jij
{J,j {Jj i - rr. - ---- < 1. (31) IJ J I èJ 2 o+_1_
IJ r ij
(comp. (8) and (16».
The greatest of the numbers VPij{Jj i ma)' be denoted by G. so that
V{Jij (Jji ~ G < 1. (32) Then it follows from (31) and (32) that
(33)
Strictly imitating the trend of thought °developed in the preceding section we now bring (25) into the form :
(fis-G):2 Bi Q; + t :2(G lij Q; + 2 (Jij Qi Qj + G lji Qi) · O. (34) i ij
The discriminant of the quadratic polynom
Glij Q; + 2 ~ij Qi Qj + G lji QJ amounts to
2 G 2 ( 2 1 ) 2 G2 (Jij- 2l ij lji = (Jij-G2 (jij + - = (I-G2) (jij -r ij rij
which certainly is not negative (comp. 33) , It follows (comp. sect. 4) that
fis -== G (= max V (Jij (Jji). (35) and . - in replacing in equation (34) G by - G - analogously. that
fis:=- - G (= - max V {Jij (J ji) . (36)
If all members AiA j of the structure are prismatic. all coeHicients {Ji jare equal to !. In th is case
~1 fis = "2 • (37)
and a rapid convergence of theiteration process is guaranteed. From the facto that constructions can be indicated for which one of the characteristic 'roots is equal to t (f.i. a continuous beam supported in n points. having in every span a constant factor of rigidity El) it follows that the limit G in (35) and (36) can be reaàed.
7. Second proof. The conjugated influence coefficients of MAXWELL.
A second method of attack of the problem is furnished by the so called conjugated" influence numbers of MAXWELL . Just as the ordinary numbers
-
495
ai j of MAXWELL are suited to express the displacements in prescribed directions iJl those points of an elastic body for which the ai jare defined, and in which the loading forces may act in the prescribed directions, the conjugated numbers aij provide the obvious means to calculate in a formal way, the force required to act in prescribed directions in those points of an elastic body for which the ai jare defined and in which prescribed displacements in the given directions occur (forces to be taken in the general sense of forces or moments, directions in the general sense of directions or axes of rotation) . Taking in view a number of points n, the number ai j is defined as the force (the moment) required to act in the point i in the prescribed direction (about the prescribed axis) if the point j is subjected to a unit .displacement in the prescribed direction (or about the prescribed axis) connected with the point j and if all other points are locked (as to prevent adisplacement in the prescribed direction in those points) 4) .
With respect to the problem uncler consideration we deHne ai j as the moment required to act extemally at the joint i , when the j'th point is subject to a unit-rotation (caused by a suitably chosen moment) and if all other joints are locked.
Let in the natura I state of loading , the rotations occurring in thc joints 1. 2 . .. n be designated by qJl' qJ2 .. • qJn, then the locking moments required to lock all joints s~multaneously, are represented by
MI = - [a l1 qJ I + al2 qJ2 + ... aln 9'n] M 2 = - [aJl 9'1 + a 22 9'2 + ... a2n 9'n]
(38)
M n = - [anI 9'1 + an2 9'2 + ... ann 9'n] (To fix our thoughts it may be supposed that the clockwise rotation -
both in respect to displacement and moment - is positive. ) From the mechanical ,point of view the iteration method developed in the
preceding sections, consisted in that every joint in its turn is unlocked with the intention to liquidate the prevailing external moment to an amount which is prescribed by the foregoing iteration. Thereafter the joint in quèstion is re-Iocked aJlJd it must be emphasized that, when the k'th iteration has been performed, with the purpose to liquidate the external moments required after the (k - 1 ) th iteration, there still will be to liqui-date new external moments due to the fact that he unlocking of a certain joint (i) has a secondary effect upon all those joints with which the joint i is materially (and directly) related.
It is obvious, that the successive unlocking of MI' M2 .. . M n gives rise to the following positive rotations at the joints (i):
(39)
4) Between the ordinary coefficients a i j and the conjugated numbers Bij simple relations do exist. Comp. fj . C . B. BIEZENO und R. CRAMMEL, Technische Dy:lamik (Springer, Berlin 1939. p. 95) .
-
496
and therefore the angles Ç?:. Ç?~ ••• Ç?~ through which the joints have to he rotated if it is required to bring the construction from the natural state of load (in which the joints 1. 2 ... nare supposed to have rotated Ç?!. Ç?2 ••• Ç?n in the positive direction ) into the state of deformation acquired af ter the first liquidation of moments. amount to:
(40)
The external locking momenrs required to effectuate this forced deformation could he calculated with the aid of (38) if only in these equations Ç?! f{J2 ••• f{Jn are replaced hy Ç?:. Ç?~ ••• Ç?~. The external locking moments requir'ed to effectuate this forced deformation could he calculated with the aid of (38) if only in these equations f{J!. f{J2 ••• f{Jn are replaced hy f{J:. f{J~ ••• f{J~. We refrain from this calculation hut ask for such .. char~ acteristic" sets f{J! for which the iterationproces would lead to the excep~ tional result. that the iterated values f{J: and the original values f{Ji would be proportional.
This requirement gives rise to the condition
f{J. + M. : a •• = Ç?2 + M 2 : a22 = ... = f{Jn + M n : a nn = fl • (41) f{J. f{J2 f{Jn
which in connection with (38) leads to the system of homogeneous linear equations
fl a •• f{J. + a •• Ç?2 + . .. a.n f{Jn = 0 a2. f{J1 + flan f{J2 + . .. a2n Ç?n = 0
anI Ç? + a n2 Ç?2 + ... flann Ç?n = 0 This system has solutions different from zero only if:
=0.
anI an2 ••• flann
(42)
(43)
In consequence of the fact that aij = aji. the roots of this equation are real and it may he stated without further proof (comp. sect. 3) that there exist n linearly independent characteristic solutions f{J~. f{J~ ••• f{J~ (k = 1. 2 ... n) which. - if iterated - give rise to flk Ç?~. flk f{J~ ••• flkÇ?~. It can easily he proved that an arhitrary set of values f{J!. f{J2 ••• f{J n as occurring in the natural loaded state of our structure. can always he decomposed into muItiples of these n characteristic functions so that:
(i= 1.2 ... n) . (44)
and therefore it is readily seen that the iteration process. as applied to
-
497
f{JI ' f{J2 ••• f{Jn will converge ancl only will converge if all roots fik of (43) satisfy the conclition
-1 < fik < 1. (45) Af ter a well-known theorem a necessary ancl sufficient conclition to fulfill th is requirement is provided by the series
(46)
(K representing any positive constant number), which constitutes a so-called series of "Sturm"-functions for equation (43).
The loss in variations occurring when in thios series two numbers fil and 1'2 are substituted (fil < fi2) is equal to the number of real roots f'k lying between fil and fi2 ' By choosing fil = - I , and fi2 = + I, this loss (after 45) must be equal to ' n, and consequently it remains to be proved that (46) has n variations for fi = - I , and no variations at all for fi = + 1. The latter condition is obviously fulfilled , as after a weIl known property of the influence coefficients everydeterminant .
all al2 • •• aln
(of7)
ani an2' .. ann
is essentially positive. The other condition is more intricate. It requires the proof of the unequality
-all a12 • •• aln
D~= :::>- 0 f n odd -co::: or . (48) neven
ani an2 •.. - a nn
We will give it for two special cases.
8. The continuous girder supported in n fixed points. In this case the numbers aij represent the locking moments which must be introduced at the supports i (~j) if at the 'Support j a unit-rotation is called into being. Evidently all numbers ai j (i ~ j) for which I i - j I > 1 are zero. Taking this into account we find , by multiplying the odd columns and the even rows of D'n (comp. 48) by (-1):
0 . .. 0
D~=
o O . . . an,n- I-ann
all al2 0 . .. 0
a21 a22 a23 • •. 0 = (_1)n .
o 0 ... a n, n-I ann and therefore - Dn being pos. - con dit ion (48) i's fulfilled.
-
498
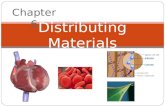
9. Trusses of Vierendeelconstruction. A similar proof holds for con-structions as represented in fig. 2.
b 20 2 3 4 5 • . . . • ... • 7 ••• • 8 9 10 •
6 . • 0 o •• 0
11 12 13 14 15 0 o •• • • o. • °n=
0 o. • • 0 •
16 17 18 19 2 • • 0 • • 0 • • • 000 •
0 • 0 •
0 • • • • •• • • •• • • • • Fig . 2. 20 • ••
Fig . 3.
It is supposed that the different joints are only liable to rotations. Again it has to be proved that .
D~ = (_1)n Dn and again the proof is simplified by the fact that a great number of influence coefficients is zero; this being the consequence of the fact that only the joints (i - 1 ), i, i + I, i - pand i + p (p representing the number of joints per row) are eHected by a moment acting at the joint i (all other joints being locked) . The determinant Dn hereby takes the schematic form
1 2 . . . . .. . . 20 ------- - --~----~--.----
1 !
; ----'----------è--- __ J __ _ Dn= (50)
every point denoting a non-zero coeHicient. By muItiplying in a suitable way the rows and columns of the corresponding determinant D~ by a factor _. I, it is easily seen that D~ = (-- 1) n Dn .
10. Concluding remark. The proof given in the preceding sections, and relating to two specHied (be it) important structures, is not a general one,
-
499
and is essentially based upon the fact that agreat number of coefficients ai f is zero. Unsatisfactory as it may be, it seems rather troublesome to give the direct general proof of the relation (48).
It will however not have escaped to the notice of the reader that the determinants (21) and (23) are essentially the same. In fact it is readily verified that
(jij rij _
VPi pj = aij· (51)
The unequality (48) therefore is proved in an indirect way, and from th is indirect proof a remarkable conclusion with respect to the influence num~ bers may be drawn.
From
-all a12' • • aln
ani an2 ••• - ann
it follows, by multiplying the odd rows and 'the even columns by - 1:
I all al2 -a(3 al4 -a15 , I a21 a22 a23 -a21 a25 -a26
Dn = (_l)n I 1 -~31 a32 a33
The unequality (48) being adopted as true, it follows that the deter~ minant D~ is essentially positive and therefore the following theorem holds:
If in a MAXWELL determinant (related to the type of structure as treated in this paper) the numbers of all diagonals of odd index (viz. all diagonals beginning with the numbers a13' a15' a17 ... , a31' a51' a71 ... ) are replaced by their negative values, the determinant remains positive.