The accuracy of Giraffe measurements of radial velocity in young clusters Richard Jackson – Keele...
15
The accuracy of Giraffe measurements of radial velocity in young clusters Richard Jackson – Keele University in collaboration with Rob Jeffries and Amy Dobson - Keele Jim Lewis and Sergey Koposov - Casu
-
Upload
anton-suggett -
Category
Documents
-
view
213 -
download
0
Transcript of The accuracy of Giraffe measurements of radial velocity in young clusters Richard Jackson – Keele...

The accuracy of Giraffe measurements ofradial velocity in young clusters
Richard Jackson – Keele University
in collaboration with
Rob Jeffries and Amy Dobson - Keele
Jim Lewis and Sergey Koposov - Casu

Lithium rich
?
One distributionor two?
Gamma Velorum cluster
RV (km/s)
Fre
quen
cy
To study cluster kinematic substructure
We need to know
(1) Typical uncertainty in RV (using MAD)
(2) Tail of the uncertainty distribution in RV (3) Any bias in RV with SNR and/or Teff
The accuracy of Giraffe measurements ofradial velocity in young clusters
Jeffries, Jackson, Cottaar et al. 2013
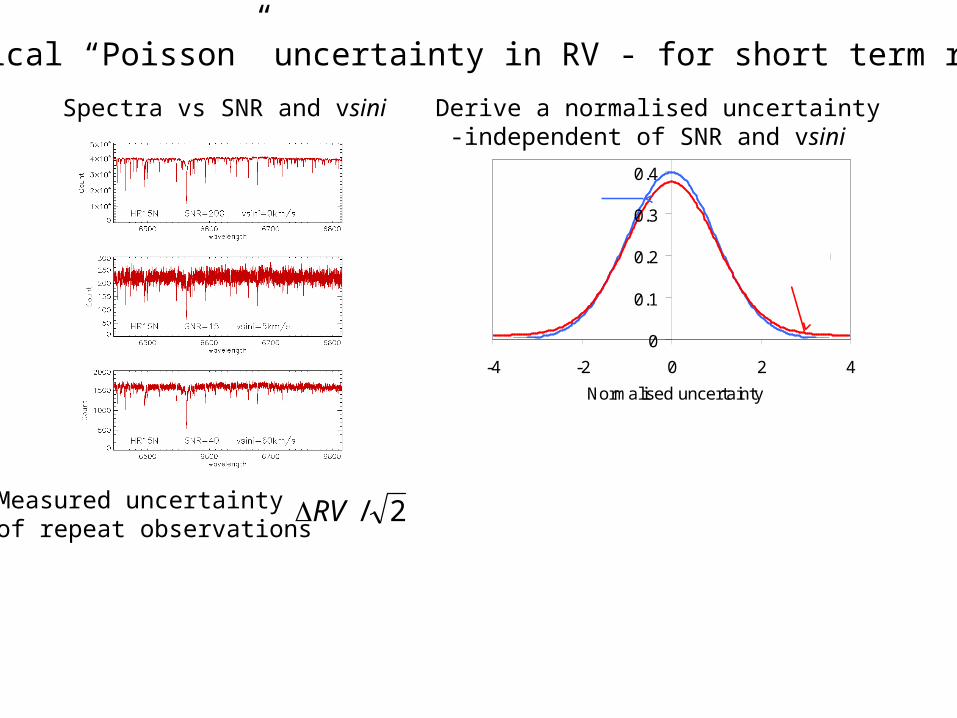
Measured uncertaintyof repeat observations
2/RV
Spectra vs SNR and vsini
0
0.1
0.2
0.3
0.4
-4 -2 0 2 4
Normalised uncertainty
Gaussian
Gaussianwith tail
Derive a normalised uncertainty -independent of SNR and vsini
Empirical “Poisson” uncertainty in RV - for short term repeats

SNR/])C/sin(1[B
2/2iv
RV
Normalised uncertainty
Measured uncertaintyof repeat observations
2/RV
Spectra vs SNR and vsini
sigma = 2.6 (1 + (vsini/46)^2)/SNR
0
0.5
1
1.5
0.00 0.05 0.10 0.15 0.201/SNR
SIG
MA
_R
Vvsini=0 km/s
vsini=20 km/s
vsini=50 km/s
vsini=80 km/s
HR15N
0
0.1
0.2
0.3
0.4
-4 -2 0 2 4
Normalised uncertainty
Gaussian
Gaussianwith tail
Reduce to normalised uncertaintyindependent of SNR and vsini
Empirical “Poisson” uncertainty in RV - for short term repeats

8463 repeats
in 8 clusters
Gama2Vel
Cha_I
rho_oph
NGC2264
NGC2547
NGC2516
NGC6633
IC4665
+ field stars
(Corot sample)
Fix Bavav=5.7=5.7
Empirical “Poisson” uncertainty in RV - for short term repeats
SNR/])C/sin(1[B 2iv
Uncertainty normalised to
where B varies with Teff
and B/C2 constant
Fix C = 26.5
RV
/2
x S
NR
logTeff
RV
/2
x S
NR
/(1
+vs
ini2/
C2
)
Find B(Teff)
RV
/2
x S
NR
/(1
+vs
ini2/C
2)
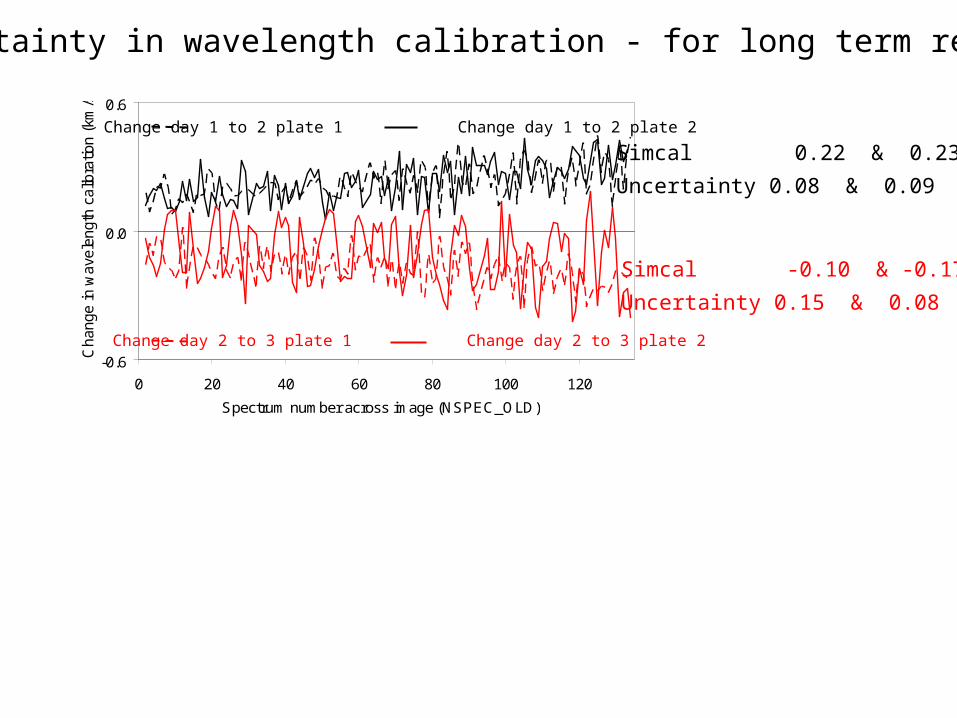
Uncertainty in wavelength calibration - for long term repeats
-0.6
0.0
0.6
0 20 40 60 80 100 120
Spectrum number across image (NSPEC_OLD)
Change in
wave
length
calib
ratio
n (
km/s
)
Change day 1 to 2 plate 1 Change day 1 to 2 plate 2
Change day 2 to 3 plate 1 Change day 2 to 3 plate 2
Simcal 0.22 & 0.23
Uncertainty 0.08 & 0.09
Simcal -0.10 & -0.17
Uncertainty 0.15 & 0.08

Uncertainty in wavelength calibration - for long term repeats
-0.6
0.0
0.6
0 20 40 60 80 100 120
Spectrum number across image (NSPEC_OLD)
Change in
wave
length
calib
ratio
n (
km/s
)
Change day 1 to 2 plate 1 Change day 1 to 2 plate 2
Change day 2 to 3 plate 1 Change day 2 to 3 plate 2
Simcal 0.22 & 0.23
Uncertainty 0.08 & 0.09
Simcal -0.10 & -0.17
Uncertainty 0.15 & 0.08
-1
-0.5
0
0.5
1
-0.25 1.75 3.75 5.75 7.75 9.75 11.75 13.75
SIM
CA
L (
km
/s)
HR 15N Plate 2 HR10 plate 2
HR15N plate 1 HR10 Plate 1
Other filters
1 day
SIMCAL offset in wavelengthscale varies through night - In similar way for all filters.
Appears to be a “mechanical offset”- independent of SNR & vsini

Total uncertainty in RV - for long term repeats between OBs
Normalised uncertainty
22222 SNR/])C/sin(1[BA
2/
iv
RV
Wavelength term
Poisson term
Poisson uncertainty(2 spectra per OB)
Cu
mu
lativ
e p
rob
abi
lity
Normalised uncertainty
Total uncertaintybetween OBs(2047 repeats)
A = 0.28 km/s
B = 5.70 km/s
C = 26.5 km/s

Total uncertainty in RV - for long term repeats between OBs
Normalised uncertainty
22222 SNR/])C/sin(1[BA
2/
iv
RV
Wavelength term
Poisson term
Poisson uncertainty(2 spectra per OB)
Cu
mu
lativ
e p
rob
abi
lity
Normalised uncertainty
Total uncertaintybetween OBs2047 repeats
A = 0.28 km/s
B = 5.70 km/s
C = 26.5 km/s
RV / (normalisation factor)
Fra
ctio
n o
f po
pula
tion
Tail of empiricaluncertaintybetween OBs
Tail of Poissonuncertainty

Total uncertainty in RV - for long term repeats between OBs
Normalised uncertainty
22222 SNR/])C/sin(1[BA
2/
iv
RV
Wavelength term
Poisson term
Poisson uncertainty(2 spectra per OB)
Cu
mu
lativ
e p
rob
abi
lity
Normalised uncertainty
Total uncertaintybetween OBs2047 repeats
A = 0.28 km/s
B = 5.70 km/s
C = 26.5 km/s
Comparison empirical and Velclass uncertainties -Velclass uncertainties are ~ 2 higher.

Absolute accuracy of RVs observed in HR10, HR15N and HR21
HIP 050139HIP 106147HIP 000616HIP 026973HIP 029295HIP 077348HIP 026973HIP 108065HIP 031415HIP 032045HIP 038747HIP 017147HIP 032103HIP 045283HIP 104318HIP 051007HIP 065859HIP 105439HIP 066032HIP 020616HIP 093373HIP 005176HIP 038747
23 standards
RV of standards from Soubiran et al. 2013rms uncertainty 0.04km/s
-0.2
0.0
0.2
0.4
0.6
HR10 HR15 HR21
Filter
RV
- R
V_
cata
log
ue
Velclass
Casu CCF
Standard stars

Absolute accuracy of RVs observed in HR10, HR15N and HR21
HIP 050139HIP 106147HIP 000616HIP 026973HIP 029295HIP 077348HIP 026973HIP 108065HIP 031415HIP 032045HIP 038747HIP 017147HIP 032103HIP 045283HIP 104318HIP 051007HIP 065859HIP 105439HIP 066032HIP 020616HIP 093373HIP 005176HIP 038747
23 standards
RV of standards from Soubiran et al. 2013rms uncertainty 0.04km/s
-0.2
0.0
0.2
0.4
0.6
HR10 HR15 HR21
Filter
RV
- R
V_
cata
log
ue
Velclass
Casu CCF
Velclass
-2
-1
0
1
2
0 50 100
SNR
delta
RV
HR10 - HR21
Standard stars Field stars
RV = 0.32 km/s
Casu CCF
-2
-1
0
1
2
0 50 100
SNR
de
lta R
V
HR10 - HR21
RV = 0.09 km/s
Data set GE_SD_CR~1500 Corot targets

Velclass
-2
-1
0
1
2
3.5 3.6 3.6 3.7 3.7 3.8 3.8
logTeff
RV
HR
10 -
HR
21 (
km/s
)
field stars Standards
Casu CCF
-2
-1
0
1
2
3.5 3.6 3.7 3.8
logTeff
RV
HR
10
- H
R2
1(k
m/s
)
field stars Standards
Casu CCF
-2
-1
0
1
2
0 200 400 600
SNR
RV
HR
10
- H
R2
1 (
km/s
)
Field stars Standards
Variation in absolute RV between HR10 and HR21 filters
Apparent bias in Velclass RVs (for HR21) a function of SNR and/or Teff?
Velclass
-2
-1
0
1
2
0 200 400 600
SNR
RV
HR
10
- H
R2
1 (
km/s
)
field stars Standards
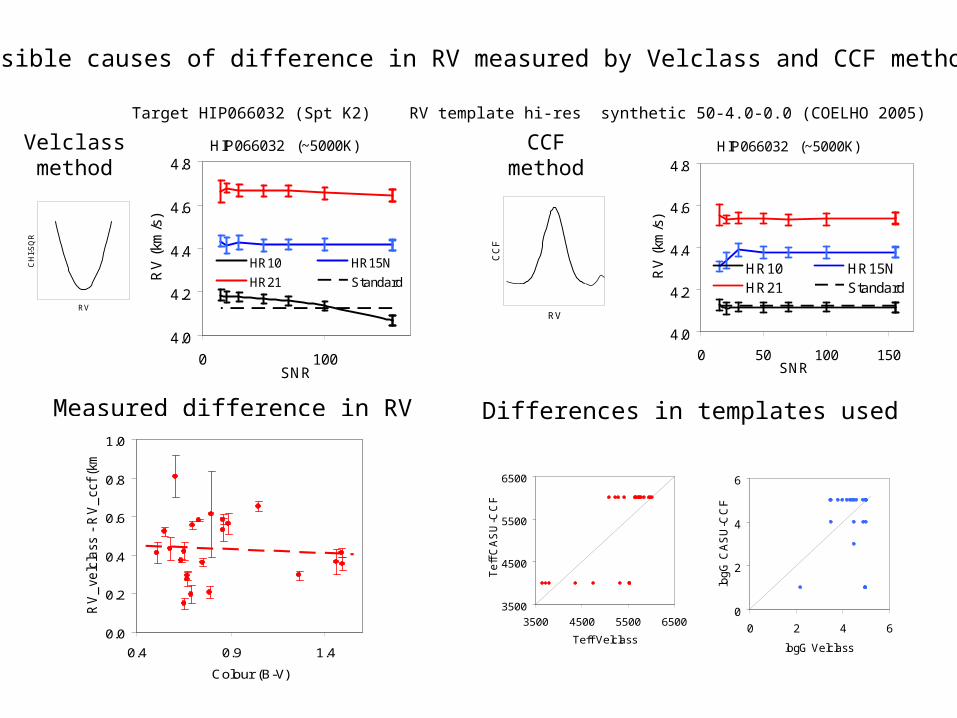
HIP066032 (~5000K)
4.0
4.2
4.4
4.6
4.8
0 100SNR
RV
(km
/s)
HR10 HR15N
HR21 Standard
Possible causes of difference in RV measured by Velclass and CCF method
CCFmethod
RV
CC
F
Velclassmethod
RV
CH
I-S
QR
Measured difference in RV Differences in templates used
0.0
0.2
0.4
0.6
0.8
1.0
0.4 0.9 1.4
Colour (B-V)
RV
_velc
lass
- R
V_ccf (k
m/s
)
3500
4500
5500
6500
3500 4500 5500 6500
Teff Velclass
Te
ff C
AS
U-C
CF
Target HIP066032 (Spt K2) RV template hi-res synthetic 50-4.0-0.0 (COELHO 2005)
0
2
4
6
0 2 4 6
logG Velclass
log
G C
AS
U-C
CF
HIP066032 (~5000K)
4.0
4.2
4.4
4.6
4.8
0 50 100 150SNR
RV
(km
/s)
HR10 HR15NHR21 Standard

1. Comparison of repeat measurements of RV in young clusters shows that the measurement uncertainty can be normalised to a simple function of SNR and vsini with a weaker dependence stellar properties.
2. The measurement uncertainty at higher SNR is dominated by a fixed uncertainty of ~0.28km/s due to changes in wavelength calibration between setups.
3. Analysis of RVs of standard stars shows a bias of ~0.4km/s for measurements made using HR21 (but no significant bias for HR10 and HR15N). The most likely cause is a mismatch between target spectra and synthetic RV templates.
4. Where possible stellar properties used to select RV templates should be fixed for
each target - based on the best available estimates of Teff, logG and Fe/H.
5. Following the planned change to GAIA/Phoenix synthetic spectra revised RVs should be re-analysed for evidence of bias with Teff and/or SNR in all filters.
The accuracy of Giraffe measurements ofradial velocity in young clusters