TELEMAC code instructions

of 24
Transcript of TELEMAC code instructions
-
8/14/2019 TELEMAC code instructions
1/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 1
Super Work Package 2
Application of the Telemac suite
Mr Nicolas Chini University of Manchester
Prof Peter Stansby University of Manchester
Table of Contents
1. Generalities about the TELEMAC suite ................................................................. .................... 3
2. Setting up of a standard simulation .............................................................. ............................... 3
2.1 Mesh generation ......................................................................... ........................................... 4
2.2 Steering file generation......................................... ................................................................. 4
2.3 Modification of FORTRAN routines, if requested ................................................................ 5
2.4 Execution .............................................................. ................................................................. 5
2.5 Post processing ................................................................. ..................................................... 5
3. Application of the TELEMAC suite within FRMRC2 .............................................................. 6
4. Data collection .................................................................................... ........................................... 8
4.1 Bathymetry .................................................................................................................. .......... 8
4.2 Topography ...................................................................... ..................................................... 8
4.3 Field measurements .......................................................... ..................................................... 8
4.4 Numerical modelling results .................................................................. ................................ 9
5. Coastal model .......................................................................... .................................................... 10
5.1
Mesh generation ......................................................................... ......................................... 10
-
8/14/2019 TELEMAC code instructions
2/24
-
8/14/2019 TELEMAC code instructions
3/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 3
1. Generalit ies about the TELEMAC suite
The hydro-informatics software TELEMAC is a finite element based solver forshallow water flows, wind wave propagation, ground water flows, tracer transport,sediment transport and morphodynamics. The software has been developed andvalidated by EDF R&D/LNHE, CETMEF, SOGREAH, HR WALLINGFORD andBAW since the early 90s. In July 2010, the software was released in an open-sourceversion and is freely downloadable from the following website:www.opentelemac.org
Within the FRMRC, 2 modules from the TELEMAC suite are used in their opensource version V6.0 :
Telemac-2dThis module solves the non linear depth-averaged shallow-water equations,including the effects of bottom friction, wind, tracers, earth rotation, weirs,
porosity, wetting and drying, diffusivity and addition of localsources(Hervouet, 2007).
Tomawac
This module solves the wave action conservation equation taking into accountwind wave generation, white capping, wave-wave interactions, bathymetricwave breaking and bottom friction (Benoitet al., 1996).
A finite elements library Bief, commonly used by any module, completes the softwarearchitecture.
Alongside with these solvers, the software comes with a pre-processing module usedfor the generating the input files and a post-processing module to handle the outputsof a simulation. The execution of the model is carried out by calling several PERLscripts.
For further details, the reader is encouraged to consult the references, and especiallythe website www.opentelemac.org for the system installation procedure.
2. Setting up of a standard simulation
For any of these two modules belonging to the TELEMAC suite, a standard set up isproposed to perform simulations. It consists into 5 main stages: mesh generation,steering file creation, FORTRAN file creation, module execution and post-precessing.
-
8/14/2019 TELEMAC code instructions
4/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 4
2.1 Mesh generation
The mesh consists in an unstructured grid composed of triangular elements. It is, here,generated by the module MATISSE. This module automatically operates a densitymap-driven automatic optimal Delaunay triangulation given constraints provided by
the user.
The user provides as input a bathymetry file in an ASCII format. MATISSE canhandle xyz file format, where x and y are coordinates associated with the bedelevation, z.
The other constraints are the outer contour of the domain, the islands boundary withinthe domain and the criteria for defining the local densification of nodes. They are allspecified by the user.
MATISSE generates two output files. The first one is a binary file containing the
information about the mesh, i.e. the number of nodes, the number of elements, thenumber of nodes per elements, the connectivity table, the boundary points, thecoordinates of the points and the bathymetry. The second file is an ASCII filecontaining information about boundary conditions. Each line of this file provides thetype of boundary conditions for one boundary point. Each line contains 13 columns.The first free columns are three integers defining the type of boundary conditions onthe free surface elevation and on the two velocity components. The following threecolumns specify the imposed values for the free surface elevation and the velocitycomponents. The seventh value is the coefficient affected to the wall friction. Thefollowing four values are used when a tracer in considered. They provide respectivelythe type of boundary condition on the tracer, its imposed value and the coefficient for
the wall friction. The two remaining integers are respectively the point number in theglobal numbering and the point number in the boundary point numbering. The binaryfile is called the GEOMETRY FILE and the ASCII file is the BOUNDARYCONDITIONS FILEand they are used in the steering file.
MATISSE interface is launched by, in a Terminal for Linux users or in a commandprompt for WS users typing the command:
>matisse -a
2.2 Steering file generation
This file is an ASCII file containing a list of KEY-WORDS and it is used to commandthe execution of the simulation.
The KEY-WORDS are extracted from the dictionary contained in the lib directory ofeach module. These KEY-WORDS specify the input files and the output ones, thegeneral options of the simulation, the initial conditions, the boundary conditions, andthe numerical options. Among the input files, the GEOMETRY FILE and the
BOUNDARY CONDITIONS FILEgenerated by MATISSE are requested.
-
8/14/2019 TELEMAC code instructions
5/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 5
2.3 Modif ication of FORTRAN routines, if requested
For particular cases, the user is allowed to modify subroutines of the program. In thatcase, the user should create a FORTRAN file where the modified subroutines aresaved. That permits not to recompile the entire system when a subroutine is modied.
In that case only the FORTRAN file is compiled and added to an archive createdduring the initial system installation.
If a FORTRAN file is created, then the KEY-WORD FORTRAN FILE should beadded in the Steering file.
2.4 Execution
The execution of a simulation is performed by typing in a Terminal, for Linux users,or in a command prompt, for WS users, the following command:
> module_name opt case_name
where module_name is the name of the considered module, either telemac2d,tomawac, artemis or sisyphe. The case_name is the name of the Steering file. Thiscommand will automatically create a temporary directory, compile the FORTRANfile, if needed and launch the simulation. The temporary directory is used to store allthe files and executable requested for the simulation.
During the call of one module, the users can use different optional commands opt.Option s allows to print the listing into a separated file. Option D is used when
compilation and execution are performed using a debugger. The user can specifywhen he wants the simulation to start by using option n and d. If option n is used,then the simulation starts at 8pm. Option d hh:mm is used for any other time.
2.5 Post processing
The post-processing is performed using the application RUBENS whose interface isactivated by typing in the command prompt or in a terminal:
>rubens a
RUBENS reads the result file and can generates temporal series, surface colours map,and vectors map. It also allows computing some extra variables based on the printedoutput variables.
-
8/14/2019 TELEMAC code instructions
6/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 6
3. Application of the TELEMAC suite within FRMRC2
The Super Work Package 2 of FRMRC2 was dedicated to wave overtopping andinduced coastal flooding modelling. These two coastal phenomenons are generated bystorm event related to large scale atmospheric conditions. This multi-scale problem issolved by a downscaling procedure chaining different modelling approaches in orderto transfer offshore wind generated wave and surge towards a seawall protecting alow-lying coastal land.
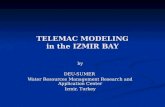
Figure 1 presents the flow chart of the transferred data between the differentmodelling approaches in order to estimate flooding maps caused by waveovertopping. The outputs from the Regional Operational Model (ROM) is imposedalong the boundary of a coastal domain where the TELEMAC system is used to
transfer water levels and wind waves towards the nearshore at the water depth ofabout 10m. At that location, these nearshore conditions are extracted in order tocompute the water levels and the wave integrated parameters at the toe of thestructure. In order to perform these nearshore transformations, a nearshore model,embedded within the coastal domain, is set up to use once again the TELEMAC suite.The output from this nearshore model are used as input to the Neural Networkapplication of the Eurotop manual (Pullenet al., 2007;van Gentet al., 2007), which
produces estimations of the overtopping discharge rates. Eventually, these rates areimposed to another TELEMAC system based model to produce flooding maps.
These 3 TELEMAC system based models are presented successively in the following
sections, with emphasis on the data exchange procedure between the different models.
-
8/14/2019 TELEMAC code instructions
7/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 7
Figure 1: Modified chart flow showing the application of TELEMAC (bold blocks) into the
downscaling procedure to assess coastal flooding from regional operational modelling.
-
8/14/2019 TELEMAC code instructions
8/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 8
4. Data collection
4.1 Bathymetry
The bathymetry for the coastal modelling is provided by Seazone Ltd, under licence.
The bathymetry used for the nearshore modelling is extracted from the 1km Strategicbathymetric and beach survey and it is provided by the Environment Agency.
4.2 Topography
The topography for the flooding modelling is extracted from LIDAR data provided by
the Environment Agency.
4.3 Field measurements
a.Water level data
Two tidal gauges are located in the computational domain of the Coastal Domain -one in Cromer and another one in Lowestoft. The temporal series of these sensors areavailable on the BODC website: https://www.bodc.ac.uk/data/online_delivery/ntslf/
b.Wave data
In 1985-1987, a directional wave buoy was deployed off Cromer at the water depth of30m. These data are available through BOCD.
In 2002, nearshore wave measurements were performed off Walcott. Thesemeasurements are available on the BODC website.
c.Wind data
Wind measurements at Gorleston and Weybourne are available from the BADCwebsite: http://www.badc.rl.ac.uk/data/dataset_index/?source=data
d.Observed highest water mark
The collection of information about the water marks during the 2007 storm event atWalcott was performed by a visit to the North Norfolk Borough Council, andinterviewing local residence.
-
8/14/2019 TELEMAC code instructions
9/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 9
4.4 Numerical modelling results
a.Water level and velocity data
Hindcast
The hindcast for water levels and depth-averaged velocity components are providedby NOC using the model POLCOMS. The available hindcast example corresponds tothe month of November 2007.
Climate projections
Water levels and depth-averaged velocities from the UKCP09 marine projections areprovided by the Hadley Centre. These projections are an ensemble runs simulating theemission scenario SRES A1B with different model parameterisation. The model usedfor the climate projection is CS3 developed by NOC.
b.Wave data
Hindcast
The hindcast of waves for the month of November 2007 is provided by NOC usingthe model WAM.
Climate projections
Waves from the UKCP09 marine projections are provided by NOC. These projectionsare an ensemble runs simulating the emission scenario SRES A1B with different
model parameterisation. The model used for the climate projection is WAMdeveloped by NOC.
c.Wind data
Hindcast
Wind velocity and direction are hindcasted by the Metoffice for the November 2007.The results are provided at a point (lat = 52.950N, lon = 1.59E) located offshore
Walcott.
d.Data availability
These data are made available through the followingwebsite:http://www.mace.manchester.ac.uk/research/sigs/coastalprocesses/projects/sw
p2/index.html.
-
8/14/2019 TELEMAC code instructions
10/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 10
5. Coastal model
5.1 Mesh generation
The initial bathymetry is provided from a digitalised chart map (Seazone Ltd.). Theaccess to the bathymetry is subjected to licensing.
The bathymetry covers the South-West of North Sea. The coordinates of bathymetricpoints are expressed in Eastings and Northings. Bottom elevations are referenced tothe Chart Datum. The coastline is located at the Lowest Astronomical Tide.
The file provided by Seazone Ltd. is a xyz file directly imported within MATISSE.The outer boundary of the computational domain of the Coastal model is set to be a
rectangle whose dimensions are about 100km by 70km so that deep water conditionsare imposed along the maritime boundary points. The constraint on point density isabout the 2400m in deep water, 1000m over the sandbanks and 700m along thecoastline. MATISSE, using this set of information, produces a mesh of 5506 elements(Figure 2).
Along the coastline, a solid boundary is assumed, meaning that no flux across thatboundary is permitted. Along the maritime boundary points, the outputs from ROMare imposed.
This computational mesh is used both for propagating the surges and the tides along
the coastline and for the propagation of wind waves towards the shoreline.
5.2 Telemac-2d simulation
a.Boundary conditions imposition
As previously stated, the boundary conditions are provided by the RegionalOperational Model, here ROM-POLCOMS, set up by the National OceanographyCentre.
To run Telemac-2d, one needs to impose either the water elevation or the velocitycomponents, depending on the criticality of the flow. For tidal flows, the direction ofthe flow varies temporally and spatially. To take into account these modifications, thesubroutine BORD is modified to allow the imposition of both water depths andvelocities along each nodes of the offshore boundary according to the output provided
by the ROM-POLCOMS.
-
8/14/2019 TELEMAC code instructions
11/24
-
8/14/2019 TELEMAC code instructions
12/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 12
outputs are saved into a binary file written in simple precision and calledzet _UBVB. CS3_POLCOMS. 200711. Each variable is stored for each time step in a tablehaving NGYNGX elements.
The coupling between ROM-POLCOMS and the Coastal model is a one-way
coupling, meaning that the output from ROM-POLCOMS are imposed to the Coastalmodel and that information from the Coastal domain is not send back to ROM-POLCOMS. In order to perform this coupling, i.e. allocating a value for the waterdepth and velocity components at each nodes of the offshore boundary of the Coastaldomain, four consistency issues must be verified: the changes of the coordinatesystem, the shift of reference level for free surface elevation, a spatial interpolationand a temporal interpolation.
Coordinate system consistency
The coordinates of the ROM-POLCOMS points are expressed into Latitudes and
Longitudes. In order to be consistent with the geographical system used for theCoastal computational grid, the ROM-POLCOMS points are converted into Eastingsand Northings using software proposed by Phil Bradley and downloadable fromhttp://pbrady.bangor.ac.uk//osgbfaq.htm.
The red points on Figure 2 are the ROM points converted into Eastings andNorthings.
Reference level consistency
The free surface elevation provided by ROM-POLCOMS is referenced to the mean
sea level, whereas the bathymetry used for the Coastal domain is referenced to theLowest Astronomical Tide level. That means that the zero for the free surfaceelevation in the Coastal model is the Lowest Astronomical Tide level, which is not themean sea level. For consistency, a datum shift is then performed to bathymetry of theCoastal model. The value of the shift is estimated by using the ERA40 reanalyses ofwater level performed by Horsburgh and Wilson (2007) (Horsburgh and Wilson,2007). This reanalyses contains 40 years of tidal level around the UK. These levelsare interpolated on the computational grid of the Coastal domain and the minimumfree surface elevation over this period is saved at each points of the grid. Thisminimum represents is assumed to provide with an estimate of the lowestastronomical tide. Thus this minimum is used as the shift datum to be applied to the
bathymetry of the Coastal model so that the reference for its free surface elevation isthe mean sea level.
The spatial interpolation
Since the ROM-POLCOMS grid spatial resolution is different from the Coastaldomain one, a spatial interpolation is requested. Given that the resolution of theROM-POLCOMS grid is about 12km, much smaller than the wavelength of a tide, asimple bilinear interpolation is applied to estimate the water level and the velocitycomponents at each point of the maritime boundary of the Coastal model.
The temporal interpolation
-
8/14/2019 TELEMAC code instructions
13/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 13
The time step of the Coastal model is much smaller than ROM-POLCOMS outputperiod. Therefore an interpolation is needed to assess the offshore conditions at eachtime step of the Coastal model. A linear interpolation is chosen.
c.Coupling implementation
The coupling is implemented in a way allowing the user (i) to specify the PATH andthe name of the ROM-POLCOMS output file, and (ii) the date of the beginning of thesimulation. No other information is requested from the user given that a ROM-POLCOMS output file is used.
The spatial and temporal interpolations are performed in the FORTRAN file. This filecontains 5 subroutines: BORD, TEMP, READPOL, LL2XY and INTERP2. The firsttwo subroutines are modified TELEMAC subroutines and the three remaining oneshave been especially created for the coupling with ROM.
The subroutine BORD is the chief subroutine, calling TEMP and READPOL andgenerating temporally and spatially varying boundary conditions used by Telemac-2d.The subroutine BORD is called at each time step and performs the temporalinterpolation between two outputs of ROM-POLCOMS. An initialisation step isadded to find the two ROM-POLCOMS outputs surrounding the date of the beginningof the computation. The date and time of the beginning of the simulation are storedrespectively in the variables MARDAT and MARTIM.
The subroutine TEMP computes the time in seconds between the beginning of thesimulation and the date of the first ROM-POLCOMS output, which is for the presentcase: 01/11/2007 00:00. The subroutine TEMP is part of the BIEF library. It has been
modified to take into account dates with 14 digits, instead of 10 digits.
The subroutine READPOL has been created for two purposes. The first one is to readthe header of the ROM-POLCOMS output file. The second purpose is to read a recordof the ROM-POLCOMS output file. The header contains information about ROM-POLCOMS grid. This information is used to compute the coordinates of the ROMnodes and to select the mask of nodes that are used for the interpolations. Thesubroutine READPOL calls two subroutines: LL2XY, which converts the coordinatesof the ROM-POLCOMS points from longitude, latitude to eastings and northings, andINTERP2 that performs the bilinear spatial interpolation.
The procedure of the imposition of spatially and temporally boundary conditions issummarised the chart flow inFigure 3.At the beginning of the simulation, the recordsin the ROM-POLCOMS surrounding time T are located by reading the ROM-POLCOMS output file; the coordinates of the ROM-POLCOMS are converted intoeastings and northings allowing selecting a mask of points surrounding the Coastaldomain. This mask selection is not necessary but it is implemented in order to reducethe number of iterations for the spatial interpolation. Then at each Telemac-2d timestep, if T belongs to the segment [T1,T2], then a linear interpolation is performed. If Tis no longer between T1 and T2, then the record T1 is set to be the record T2 and anew record of ROM-POLCOMS is read, followed by a spatial interpolation. Then thetest on T is once again performed.
-
8/14/2019 TELEMAC code instructions
14/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 14
Figure 3 : Temporal evaluation of the boundary conditions
d.Example of KEY-WORDS in the Steering file
Three KEY-WORDS are requested for the coupling with the regional operationalmodel:
BINARY DATA FILE 2
This KEY-WORD specifies the PATH and the name of the ROM-POLCOMS outputfile. It also specifies the binary type of the file. TELEMAC system is compiled withthe option BIG ENDIAN. One should pay attention that the ROM-POLCOMS file iswritten with this option. The file is copied in the telemac2d temporary file and openedwith the logical unit NBI2.
As an example, the KEY-WORD BINARY DATA FILE 2 can be:BI NARY DATA FI LE 2 =' F: / POLCOMS/ new/ zet _UBVB. CS3_POLCOMS. 200711'
-
8/14/2019 TELEMAC code instructions
15/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 15
ORIGINAL DATE OF TIME
This KEY-WORD provides the date of the beginning of the simulation. It requiresthree integers separated by semicolons. The first integer is the year of the date; thesecond one is the month of the date; the third one is the day of the date
As an example, for starting the simulation on the 8thof November 2007, the KEY-WORD should be:
ORI GI NAL DATE OF TI ME = 2007; 11; 8
ORIGINAL HOUR OF TIME
This KEY-WORD provides the time of the beginning of the simulation. It requiresthree integers separated by semicolons. The first integer is the hours of the time; thesecond one is the minutes of the date; the third one are the seconds of the date
As an example, for starting the simulation on the 15:03:58, the KEY-WORD shouldbe:
ORI GI NAL HOUR OF TI ME = 15; 3; 58
5.3 Tomawac simulation
a.Boundary conditions imposition
For Tomawac simulations, three inputs are requested: the wind, the offshore waveinput (either wave integrated parameters or wave directional spectrum) and the water
depth.
Wind input
The wind velocity components are provided by the MetOffice at a location offWalcott. The temporal series is stored within an ASCII file. The wind field is assumeduniform. The subroutine VENUTI is modified in order to read this file.
Offshore wave input
The offshore wave input is provided by NOC and results from a simulation performed
with WAM on the ROM computational grid. Similarly to the procedure implementedfor Telemac-2d, the boundary conditions are extracted and then interpolated along theboundary nodes of the Coastal domain. In order to do this, the subroutine LIMWAC ismodified. The outputs from ROM-WAM are stored in a file per day and two types offiles are provided: the MAP files providing records of wave integrated parameters onthe entire ROM grid and the SPE files containing the directional wave spectrum at
points located near the Coastal domain boundary.
Water depths input
-
8/14/2019 TELEMAC code instructions
16/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 16
Water depths are provided by ROM-POLCOMS. A bilinear interpolation is used toassess the water depths at each nodes of the coastal model. This perform by thesubroutine MODIF_DEPTH called by LIMWAC.
b.Coupling implementation
Similarly to the coupling between POLCOMS and Telemac-2d, the coupling betweenROM-WAM and Tomawac has been implemented in order to allow users to set up asimulation by only modifying the steering file of Tomawac.
The user has to specify (i) the PATH and the name of the ROM-POLCOMS outputfile, (ii) the date of the beginning of the simulation, (iii) the PATH and the name ofROM-WAM output file.
The spatial and temporal interpolations are performed in the FORTRAN file. This filecontains two TELEMAC subroutines LIMWAC and TEMP, the subroutines created
for the coupling with ROM-POLCOMS, embedded within subroutineMODIF_DEPTH, and a number of subroutines dedicated to read and to interpolate ofthe wave directional spectrum from ROM-WAM. Eventually, the FORTRAN file alsocontains the TELEMAC subroutine VENUTI used for the wind input reading.
The subroutine LIMWAC is the chief subroutine, calling MODIF_DEPTH andENRSPE, and generating temporally and spatially varying boundary conditions used
by Tomawac. The subroutine LIMWAC is called at each time step and performs thetemporal interpolation between two outputs of ROM-WAM, using the subroutineINTERP_TEMP. An initialisation step is added to find the two ROM-POLCOMS andROM-WAM outputs surrounding the date of the beginning of the computation. The
date and time of the beginning of the simulation are stored respectively in the variableDDC.
The subroutine MODIF_DEPTH performs exactly the same statements as BORDused when running Telemac-2d, regardless the velocity components. Although BORDwas dedicated to compute the boundary conditions along the Coastal domain
boundary nodes, MODIF_DEPTH computes the water depth at each Coastal domainnode.
During the initialisation procedure, the routine LECSPEC is called in order to assessthe parameters of the ROM grid and the of the ROM-WAM spectrum grid. This
routine calls also LL2XY in order to convert the ROM grid coordinates fromlongitude and latitude to eastings and northings.
During this initialisation, the offshore boundary points from Tomawac are alsoassessed and then compared to the ROM grid points in order to compute the weightsused for the spatial interpolation.
The initialisation contains also the computation of the weights for the interpolation inthe spectrum space. These weights are computed after assessing the frequencies of inthe ROM-WAM spectrum grid.
-
8/14/2019 TELEMAC code instructions
17/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 17
The computation of these various interpolation weights and their saving are notnecessary but it is redundant to compute them at each time, since they are invariant.
The procedure of the imposition of spatially and temporally boundary conditions issimilar the chart flow inFigure 3.At the beginning of the simulation, the records in
the ROM-POLCOMS and ROM-WAM surrounding time T are located by reading theboth output file; the coordinates of the ROM-POLCOMS and ROM-WAM areconverted into eastings and northings allowing selecting a mask of points surroundingthe Coastal domain. Then at each Telemac-2d time step, if T belongs to the segment[T1,T2], then a linear interpolation is performed. If T is no longer between T1 and T2,then the record T1 is set to be the record T2 and a new record of ROM-WAM andROM-POLCOMS is read, followed by a spatial interpolation. ROM-WAM output fileis a daily saving, so then a routine ENRSPE is set up to open and close these files asthe time passes through. Then the test on T is once again performed.
c.Example of KEY-WORDS in the Steering file
Four KEY-WORDS are requested for the coupling with the regional operationalmodel:
BINARY DATA FILE 1
This KEY-WORD specifies the PATH and the name of the ROM-WAM output file. Italso specifies the binary type of the file. TELEMAC system is compiled with theoption BIG ENDIAN. One should pay attention that the ROM-WAM file is writtenwith this option. The file is copied in the tomawac temporary file and opened with thelogical unit NBI1. The user should give to that KEY-WORD the name of the first
ROM-WAM file. The format of the name of this file should be :PREFI XYYYYMMDDHHMNSC, where PREFI Xis either SPE or MAP,YYYYis the year, MM,the month, DD, the day, HH, the hour, MN, the minutes and SC, the seconds. The dateand time at the end of the ROM-WAM output file is the last record saved in the file,so that the file containing the record hindcast on the 1stof November at 1am is the onecalled PREFI X20071102000000
As an example, the KEY-WORD BINARY DATA FILE 1 should be:BI NARY DATA FI LE 1 =' F: / WAM/ new/ SPE20071102000000'
BINARY TIDAL WATER LEVEL FILE
This KEY-WORD specifies the PATH and the name of the ROM-POLCOMS outputfile. It also specifies the binary type of the file. TELEMAC system is compiled withthe option BIG ENDIAN. One should pay attention that the ROM-POLCOMS file iswritten with this option. The file is copied in the tomawac temporary file and openedwith the logical unit NMAB.
As an example, for starting the simulation on the 8thof November 2007, the KEY-WORD should be:
BI NARY TI DAL WATER LEVEL FI LE =' F: / POLCOMS/ new/ zet _UBVB. CS3_POLCOMS. 200711'
-
8/14/2019 TELEMAC code instructions
18/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 18
FORMATTED WINDS FILE
This KEY-WORD specifies the PATH and the name of the wind output file. It alsospecifies the ascii type of the file. The file is copied in the tomawac temporary fileand opened with the logical unit NVEN.
As an example, for starting the simulation on the 8thof November 2007, the KEY-WORD should be:
FORMATTED WI NDS FI LE =' F: / METOFFI CE/ wi nd_ukmo. t xt '
DATE OF COMPUTATION BEGINNING
This KEY-WORD provides the date and the time of the beginning of the simulation.It requires an integer formatted as: YYYYMMDDHHMNSC, whereYYYYis the year, MM, themonth, DD, the day, HH, the hour, MN, the minutes and SC, the seconds
As an example, for starting the simulation on the 8thof November 2007 at 15:03:58,the KEY-WORD should be:
DATE OF COMPUTATI ON BEGI NNI NG = 20071108150358
d.Coupling with the Nearshore model
The wave spectrum and the water level are saved at a location off Walcott in order toprovide with information for the boundary conditions of the Nearshore model. Inorder to do so, the Steering file of Tomawac should contain these two additional key-words providing the location of the point where the wave spectrum should beestimated.
ABSCISSAE OF SPECTRUM PRINTOUT POINTS =636870.
ORDINATES OF SPECTRUM PRINTOUT POINTS =333861.
In this example the wave directional spectrum is computed at the location X =636870.0m and Y = 333861.0m.
-
8/14/2019 TELEMAC code instructions
19/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 19
6. NEARSHORE MODELLING
6.1 Mesh generation
The initial bathymetry is extracted from the strategic beach and bathymetry surveysundertaken twice a year by the Environment Agency. The profile off Walcott called
N3C8 in the Environment Agency nomenclature is used as input for the bathymetryfor the nearshore model, assuming that the bathymetry is uniform in the longshoredirection.
Figure 4: Localisation map (a) and (b) computational mesh of the Nearshore model, located off
Walcott. The grey line are the triangular elements of the Coastal computational domain. The
black dotted line represents the location of the N3C8 profile.
Bottom elevations are referenced to the Ordnance Datum.
The constraint on point density is about the 80m offshore, 0.1m over the seawall.MATISSE, using this set of information, produces a mesh of 16032 elements (Figure4). For this application, only the details from the seawall are imported withinMATISSE. The bathymetry is interpolated a posteriori after the generation of the grid.
This computational mesh is used both for propagating wind waves towards the toe ofthe seawall at Walcott.
-
8/14/2019 TELEMAC code instructions
20/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 20
Along the seawall crest, a solid boundary is free condition is assumed. Along theoffshore boundary points, the outputs from the wave spectrum estimated from theCoastal modelling is imposed. For the lateral boundaries, a special treatment isoperated in order to conserve the independency to the longshore direction. For each ofthese boundary points, the wave spectrum from the nearest inner point is imposed.
6.2 Tomawac simulations
a.Boundary conditions imposition
For Tomawac simulations on the Nearshore domain, two inputs are requested theoffshore wave input (either wave integrated parameters or wave directional spectrum)and the water depth. For the Nearshore domain where water depths are relativelyshallow, the wind induced processes on wave propagation are disregarded.
Offshore wave input
The offshore wave input is provided by the Coastal modelling. Integrated waveparameters from the Coastal model are extracted every hour and imposed to theoffshore boundary nodes of the Nearshore model. The imposed values are prescribedin the Tomawac Steering file. The direction of waves is assumed perpendicular to thecoastline.
Water depths input
Water depths are provided by ROM-POLCOMS. The hourly outputs are prescribed toTomawac by assigning the value of the still water level in the Steering file.
b.Coupling implementation
The Nearshore model is run for each boundary condition until a steady state isreached.
To set up each run, a pre-processing is requested. This step is used to (i) generate theSteering files, (ii) select the inner point for the lateral boundaries treatment.
For each simulation, both the nil wave incident offshore condition and the lateralboundaries are imposed in the FORTRAN file.
Steering file generation
For each Coastal modelling output, a steering file is generated automatically by aPERL script in order to assign the values of the KEY-WORDS: BOUNDARYSIGNIFICANT WAVE HEIGHT, BOUNDARY PEAK FREQUENCY, INITIALSTILL WATER LEVEL.
Inner point selection
For the treatment of the lateral boundary conditions, the Nearshore model needs to
locate for each lateral boundary nodes, the inner point from which the directional
-
8/14/2019 TELEMAC code instructions
21/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 21
spectrum will be used as a boundary condition. The selection of these points isperformed by a preliminary Tomawac run. Only for this run, the BOUNDARYCONDITION FILE is modified to specify an imposed condition for the lateral
boundary nodes. The remaining boundary nodes are set to a closed boundary. TheFORTRAN file of that run contains the subroutine CORFON. When the simulation is
performed this subroutine identifies each boundary node having an imposed boundarycondition. For each of these nodes, the subroutine translates this boundary node insidethe computational domain according to the normal vector of the boundary at thatnode. The translated point is located inside a triangular element whose apexes are thensaved. These apexes will be used afterwards to compute the boundary conditions to beimposed at the lateral boundary node.
FORTRAN file
The FORTRAN file includes the Tomawac subroutine LIMWAC. This subroutine ismodified to compute the wave direction at the offshore boundary nodes and to impose
the wave conditions along the lateral boundaries. The wave direction is assumedperpendicular to the offshore boundary. So then the wave direction is equal to theangle of the normal vector of the boundary with respect to the North.
6.3 Coupling with the Eurotop Neural Network application
The Neural Network application requires as hydraulic inputs, the significant waveheight at the toe of the structure, the wave period, Tm0,-1, the wave incidence andwater level at the toe.
These parameters are estimated by firstly extracted the significant wave height, thepeak wave period and the water level along each point of profile N3C8. Thisextraction includes an interpolation involving the barycentric coordinates of these
points according to the triangular to which they belong. The breaking point is thenestimated by considering the point where the ratio between significant wave heightand the local water depth is higher than 0.8. The wave height at the breaker is thenused to estimate the wave set-up by using the formulation proposed by (Dean andDalrymple, 2002). The wave set-up is then added to simulated water level at the toe ofthe structure to estimate the water level which is imposed to Eurotop.
The wave period for Eurotop is estimated using the formula (Coeveldet al., 2005):
1.11,0
p
m
TT =
where Tprepresents the peak wave period.
-
8/14/2019 TELEMAC code instructions
22/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 22
7. Flooding modelling
7.1 Mesh generation
Data, used for the generating the mesh, are provided by the Environment Agency.They consist of a set of three tables containing, on a regular grid, (i) the bottomelevation containing vegetations and buildings, (ii) the filtered bottom elevation toremove vegetations and buildings and (iii) the mask of the filter. The bottom elevationis measured using light detection and ranging (LIDAR) technique. Three spatialresolutions are provided: a 2m resolution, a 1m resolution and 0.25m resolution. Allthe elevations are referenced to the Ordnance Datum.
Figure 5: Computation domain for the flooding model showing the bed elevation of surroundingWalcott community.
The mask table provides with the location of building.
The seawall location is estimated by reading each column of the table containing thebottom elevation with a 0.25m resolution. Each column is read from North to South,and the seawall is located as the point where the bottom elevation is higher than6mODN.
The computational grid is set as a rectangle whose dimensions are 1000m by 2750m.Along the coastline, the frontier is modified to take into account the seawall crest
-
8/14/2019 TELEMAC code instructions
23/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 23
location (Figure 5). The elevation of any point located along the seawall is set to6.6mODN
Buildings inside the domain are considered as island.
7.2 Telemac-2d simulation
The version V6.0 is here used for the simulation of the inundation of Walcott. Thisversion contains a treatment for wetting and drying that checks that the water depthremains constantly positive.
a.Boundary condition imposition
For the inundation modelling, both the water depth and the velocities are prescribingalong the seawall. These conditions are derived from the linear overtopping dischargerate provided by the Shallow Water And Boussinesq (SWAB) model, assuming theflow to be critical.
Two different temporal series of input are considered: either a wave by waveovertopping discharge rates or a constant overtopping discharge rate corresponding tothe mean temporal series.
This temporal series are saved into an ASCII file which are open with the unit NFO1and read by the routine BORD. This file contains two columns, one for the time inseconds and one for the linear overtopping discharge in m3/l/m. The PATH and nameof this file are specified into Telemac2d Steering file by assigning the KEY-WORD:FORMATTED DATA FILE 1.
-
8/14/2019 TELEMAC code instructions
24/24
Work Package 2.1 Appendix 1 Deliverable 2.1 28.09.2011 24
8. References
Benoit, M., Marcos, F. and Becq, F. (1996) Development of a third generationshallow-water wave model with unstructured spatial meshing. 25thlnternational Conference on Coastal Engineering, Orlando
Coeveld, E. M., van Gent, M. R. A. and Pozueta, B. (2005) Neural Network: ManualNN_Overtopping 2. WL | Delf Hydraulics
Dean, R. G. and Dalrymple, R. A. (2002) Coastal Processes with EngineeringApplications. Cambridge University Press
Hervouet, J.-M. (2007) Hydrodynamics of free surface flows modelling with the finiteelement method. Wiley
Horsburgh, K. J. and Wilson, C. (2007) Tide-surge interaction and its role in thedistribution of surge residuals in the North Sea. J. Geophys. Res. 112: C08003
Pullen, T., Allsop, N. W. H., Bruce, T., Kortenhaus, A., Schttrumpf, H. and van derMeer, J. W. (2007) EurOtop Wave Overtopping of Sea Defences and RelatedStructures - Assessment Manual.
van Gent, M. R. A., van den Boogaard, H. F. P., Pozueta, B. and Medina, J. R. (2007)
Neural network modelling of wave overtopping at coastal structures. CoastalEngineering 54: 586-593