Tele Design of Reactive Systems Summer 2001 Prof. Dr. Stefan Leue Institute for Computer Science...
22
tele Design of Reactive Systems Summer 2001 Prof. Dr. Stefan Leue Institute for Computer Science Albert-Ludwigs-Universität Freiburg [email protected] Copyright © Stefan Leue 2001
-
date post
19-Dec-2015 -
Category
Documents
-
view
220 -
download
3
Transcript of Tele Design of Reactive Systems Summer 2001 Prof. Dr. Stefan Leue Institute for Computer Science...

tele
Design of Reactive SystemsSummer 2001
Prof. Dr. Stefan LeueInstitute for Computer Science
Albert-Ludwigs-Universität Freiburg
Copyright © Stefan Leue 2001

tele Design of Reactive Systems / Summer 2002 V - 2 © Stefan Leue 2002
Temporal Logic based Requirement Specification
Part 5a
tele Design of Reactive Systems / Summer 2002 V - 3 © Stefan Leue 2002
Properties Property
A system execution (computation) will be modeled as a sequence of states or events 0 = <g, a, z, g, ...> 1 = <g, a, d, g, ...>
A system property is represented by a set of computations = {0, 1, ...}
Definition a program P has the property if all its computations are in .
Property Representation normally too cumbersome to enumerate all infinite computations,
therefore use of mathematical formalisms– state machines
property corresponds to accepted language -regular expressions– temporal logic
tele Design of Reactive Systems / Summer 2002 V - 4 © Stefan Leue 2002
Safety and Liveness Classification of Properties
safety: something bad will never happen– example: it is never the case that more than one process is in the
critical section (mutual exclusion)– invariant violation
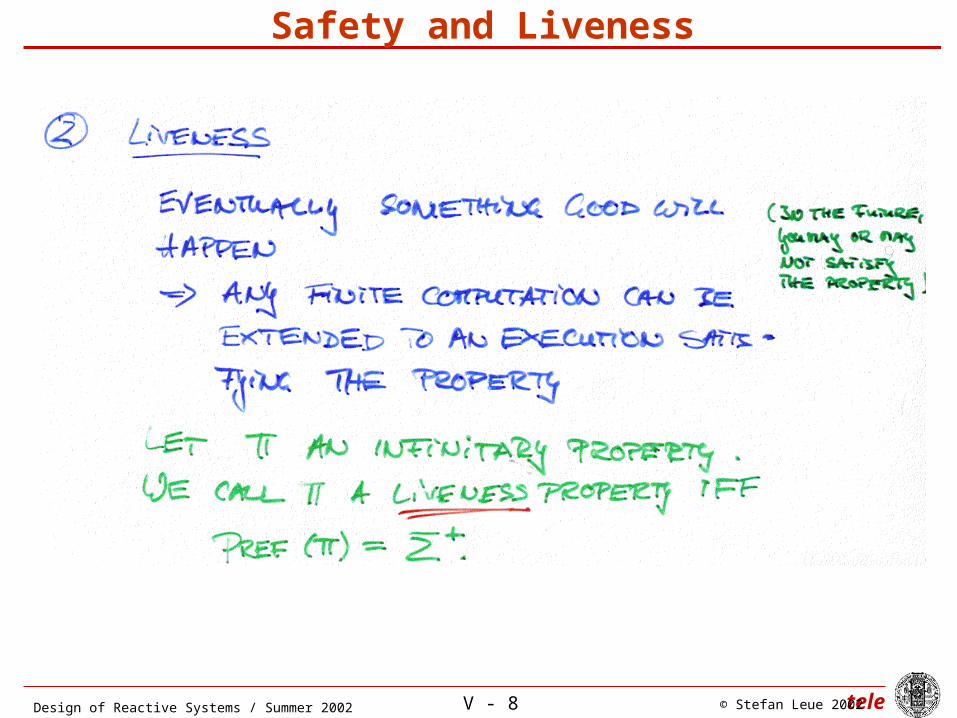
liveness: something good will eventually happen– example: any process attempting to get access to the critical
section will eventually be granted access
tele Design of Reactive Systems / Summer 2002 V - 5 © Stefan Leue 2002
Safety and Liveness Notation
: finite set of states +: set of all non-empty, finite sequences of states from : set of all non-empty, infinite sequences of states from
Finitary and infinitary properties We call + a finitary property, and a finitary or partial
computation We call an infinitary property, and an infinitary
computation

tele Design of Reactive Systems / Summer 2002 V - 6 © Stefan Leue 2002
Safety and Liveness Prefixes

tele Design of Reactive Systems / Summer 2002 V - 7 © Stefan Leue 2002
Safety and Liveness
tele Design of Reactive Systems / Summer 2002 V - 8 © Stefan Leue 2002
Safety and Liveness

tele Design of Reactive Systems / Summer 2002 V - 9 © Stefan Leue 2002
Safety and Liveness
tele Design of Reactive Systems / Summer 2002 V - 10 © Stefan Leue 2002
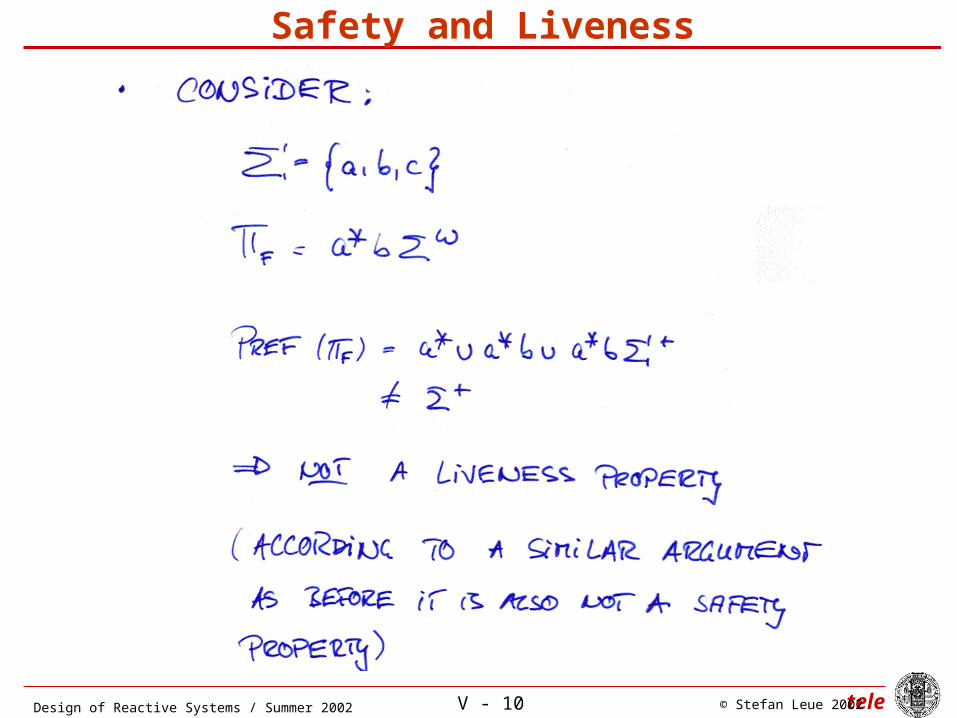
Safety and Liveness

tele Design of Reactive Systems / Summer 2002 V - 11 © Stefan Leue 2002
Safety and Liveness

tele Design of Reactive Systems / Summer 2002 V - 12 © Stefan Leue 2002
Safety and Liveness Why the safety/liveness classification?
Intuitively– checking safety property: simple exploration of all states– checking livenes property: exploration of all states, checking in
every state whether any continuation of the prefix will satisfy property
Consequence– more search effort for liveness properties– therefore more expensive to verify

tele Design of Reactive Systems / Summer 2002 V - 13 © Stefan Leue 2002
Safety and Liveness Example
if the system is in a state in which a message has been sent, then it will eventually reach a state in which a message has been received
tele Design of Reactive Systems / Summer 2002 V - 14 © Stefan Leue 2002
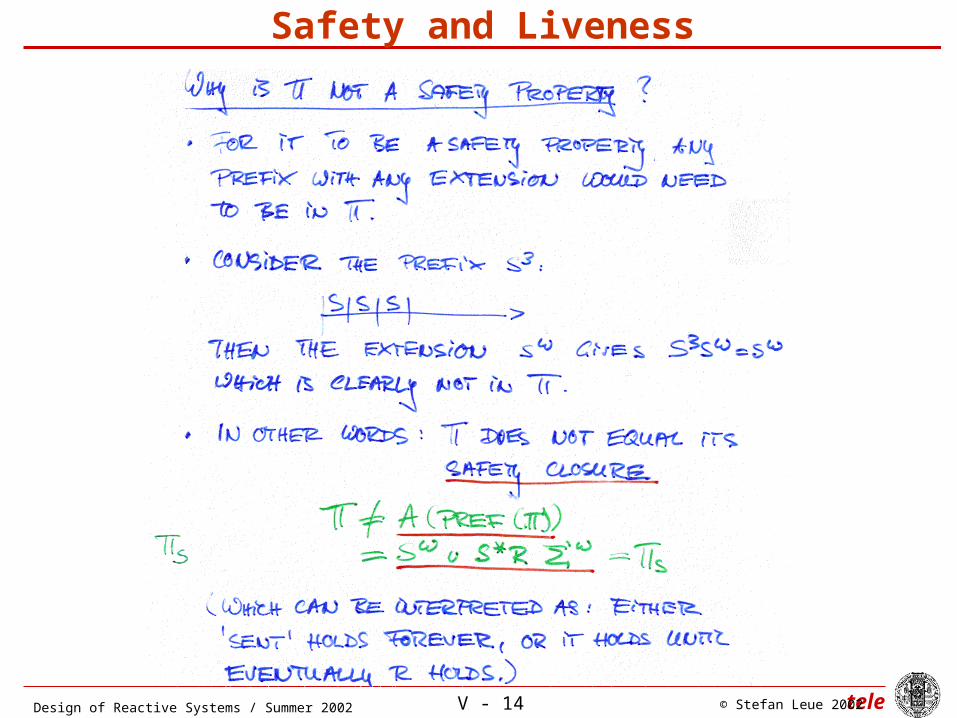
Safety and Liveness

tele Design of Reactive Systems / Summer 2002 V - 15 © Stefan Leue 2002
Safety and Liveness

tele Design of Reactive Systems / Summer 2002 V - 16 © Stefan Leue 2002
Safety and Liveness

tele Design of Reactive Systems / Summer 2002 V - 17 © Stefan Leue 2002
Safety and Liveness

tele Design of Reactive Systems / Summer 2002 V - 18 © Stefan Leue 2002
Safety and Liveness

tele Design of Reactive Systems / Summer 2002 V - 19 © Stefan Leue 2002
Safety and Liveness

tele Design of Reactive Systems / Summer 2002 V - 20 © Stefan Leue 2002
Safety and Liveness Other Classifications
topological– safety: closed sets– liveness: dense sets
temporal logic (more later) automata theoretic

tele Design of Reactive Systems / Summer 2002 V - 21 © Stefan Leue 2002
Safety and Liveness Examples
Safety– partial correctness
program doesn't produce wrong results and does not enter an unwanted state
– mutual exclusion never two processes in critical section at the same time
– absence of deadlock the program never reaches a deadlock state
Liveness– termination
the programme will eventually reach a final state– progress
the programme will eventually receive the requested service
tele Design of Reactive Systems / Summer 2002 V - 22 © Stefan Leue 2002
References [Hughes and Cresswell] G. Huges and M. Cresswell, An
Introduction to Modal Logic, Methuen, 1968 [Huth and Ryan] M. Huth and M. Ryan, Logic in
Computer Science - Modelling and reasoning about systems, Cambridge University Press, 2000
[Manna and Pnueli 92] Z. Manna and A. Pnueli, The Temporal Logic of Reactive and Concurrent Systems - Specifications, Springer Verlag, 1992
[Schwarz and Melliar-Smith] R. Schwarz and M. Melliar-Smith, From State Machines to Temporal Logic: Specification Methods for Protocol Standards, IEEE Transactions on Communications, 30(12), S. 2486 - 2496, Dezember 1982.