Systematic Derivation of the Weakly Non-Linear Theory of ... · Systematic Derivation of the Weakly...
39
Systematic Derivation of the Weakly Non-Linear Theory of Thermoacoustic Devices P.H.M.W. in ’t panhuis, S.W. Rienstra, J. Molenaar Dep. of Mathematics and Computer Science Technische Universiteit Eindhoven P.O. Box 513, 5600 MB Eindhoven, The Netherlands Abstract Thermoacoustics is the field concerned with transformations between thermal and acoustic energy. This paper teaches the fundamentals of two kinds of thermoacoustic devices: the ther- moacoustic prime mover and the thermoacoustic heat pump or refrigerator. Two technologies, involving standing wave and traveling wave modes, are considered. We will investigate the case of a porous medium and two heat exchangers placed in a gas-filled resonator, in which either a standing or traveling wave is maintained. The central problem is the interaction between the porous medium and the sound field in the tube. The conventional thermoacoustic theory is reexamined and a systematic and consistent weakly non-linear theory is constructed based on dimensional analysis and small parameter asymptotics. The difference with conventional thermoacoustic theory lies in the dimensional analysis. This is a powerful tool in understanding physical effects which are coupled to several dimensionless parameters that appear in the equations, such as the Mach number, the Prandtl number, the Laucret number and several geometrical quantities. By carefully analyzing limiting situations in which these parameters differ in orders of magnitude, we can study the behavior of the system as a function of parameters connected to geometry, heat transport and viscous effects. 1. Introduction The most general interpretation of thermoacoustics, as described by Rott [19], includes all effects in acoustics in which heat conduction and entropy variations of the (gaseous) medium play a role. In this paper, however, we will focus specifically on thermoacoustic devices exploiting thermoacoustic concepts to produce useful refrigeration, heating, or work. 1.1 A brief history Thermoacoustics has a long history that dates back more than two centuries. For the most part heat- driven oscillations were subject of these investigations. The reverse process, generating temperature differences using acoustic oscillations, is a relatively new phenomenon. The first qualitative expla- nation was given in 1887 by Lord Rayleigh in his classical work ”The Theory of Sound” [14]. He explains the production of thermoacoustic oscillations as follows: 1
-
Upload
trannguyet -
Category
Documents
-
view
218 -
download
0
Transcript of Systematic Derivation of the Weakly Non-Linear Theory of ... · Systematic Derivation of the Weakly...

Systematic Derivation of the Weakly Non-Linear Theory ofThermoacoustic Devices
P.H.M.W. in ’t panhuis, S.W. Rienstra, J. Molenaar
Dep. of Mathematics and Computer ScienceTechnische Universiteit Eindhoven
P.O. Box 513, 5600 MB Eindhoven, The Netherlands
Abstract
Thermoacoustics is the field concerned with transformations between thermal and acousticenergy. This paper teaches the fundamentals of two kinds of thermoacoustic devices: the ther-moacoustic prime mover and the thermoacoustic heat pump or refrigerator.
Two technologies, involving standing wave and traveling wave modes, are considered. We willinvestigate the case of a porous medium and two heat exchangers placed in a gas-filled resonator,in which either a standing or traveling wave is maintained. The central problem is the interactionbetween the porous medium and the sound field in the tube. The conventional thermoacoustictheory is reexamined and a systematic and consistent weaklynon-linear theory is constructedbased on dimensional analysis and small parameter asymptotics.
The difference with conventional thermoacoustic theory lies in the dimensional analysis. Thisis a powerful tool in understanding physical effects which are coupled to several dimensionlessparameters that appear in the equations, such as the Mach number, the Prandtl number, the Laucretnumber and several geometrical quantities. By carefully analyzing limiting situations in whichthese parameters differ in orders of magnitude, we can studythe behavior of the system as afunction of parameters connected to geometry, heat transport and viscous effects.
1. Introduction
The most general interpretation of thermoacoustics, as described by Rott[19], includes all effects inacoustics in which heat conduction and entropy variations of the (gaseous) medium play a role. Inthis paper, however, we will focus specifically on thermoacoustic devicesexploiting thermoacousticconcepts to produce useful refrigeration, heating, or work.
1.1 A brief history
Thermoacoustics has a long history that dates back more than two centuries.For the most part heat-driven oscillations were subject of these investigations. The reverse process, generating temperaturedifferences using acoustic oscillations, is a relatively new phenomenon. The first qualitative expla-nation was given in 1887 by Lord Rayleigh in his classical work ”The Theory of Sound” [14]. Heexplains the production of thermoacoustic oscillations as follows:
1
”If heat be given to the air at the moment of greatest condensation (compression) or takenfrom it at the moment of greatest rarefaction (expansion), the vibration isencouraged”.
Rayleigh’s qualitative understanding turned out to be correct, but a quantitatively accurate theoret-ical description of those phenomena was not achieved until much later. Thebreakthrough came in1969, when Rott and coworkers started a series of papers [15], [16], [18], [20] in which a succesfullinear theory of thermoacoustics was given. The first to give a comprehensive picture, was Swift [21]in 1988. He implemented Rott’s theory of thermoacoustic phenomena into creatingpractical thermoa-coustic devices. His work included a short history, experimental results,discussions on how to buildthese devices, and a coherent development of the theory based on Rott’s work. Since then Swift andothers have contributed a lot to the development of thermoacoustic devices.In 2002 Swift [23] alsowrote a textbook, providing a complete introduction into thermoacoustics and treating several kindsof thermacoustic devices. Recently Tijani [24] wrote a Ph.D thesis based onSwift’s work in which healso discusses the linear theory of thermoacoustics. Most of the work on thermoacoustic devices hasbeen been reviewed by Garrett [4] in 2003.
1.2 Classification
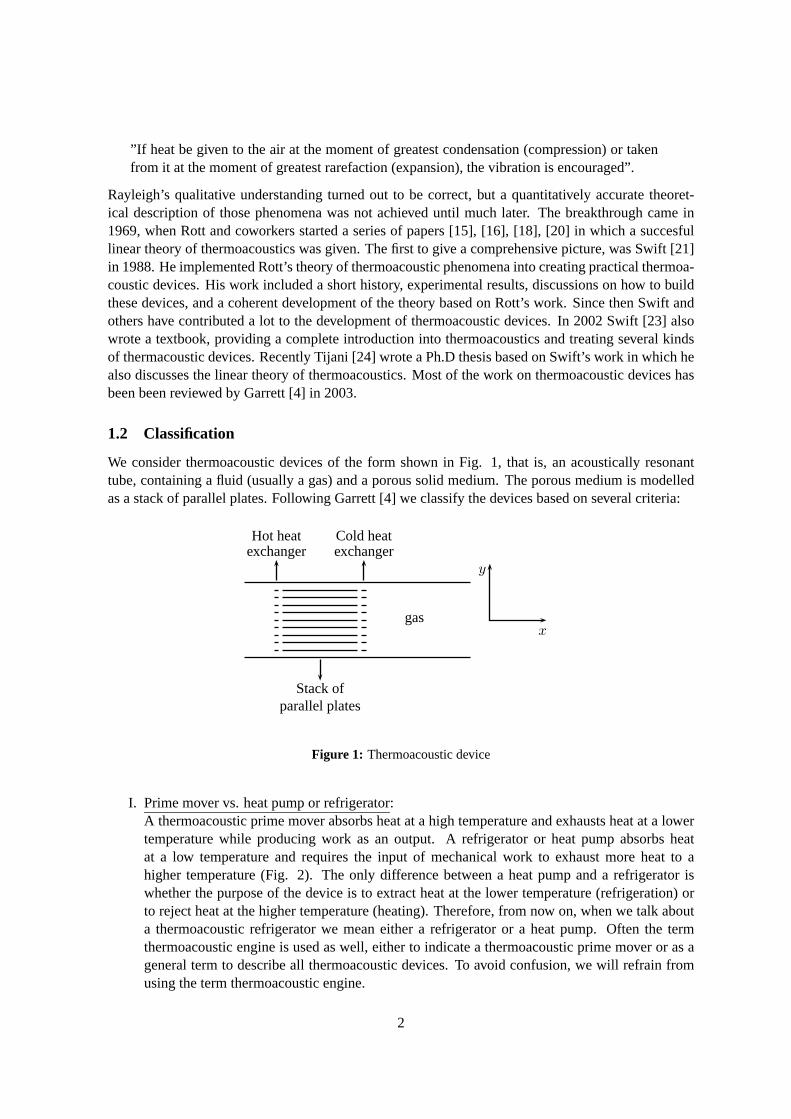
We consider thermoacoustic devices of the form shown in Fig. 1, that is, anacoustically resonanttube, containing a fluid (usually a gas) and a porous solid medium. The porous medium is modelledas a stack of parallel plates. Following Garrett [4] we classify the devicesbased on several criteria:
gasx
y
Stack ofparallel plates
Hot heatexchanger
Cold heatexchanger
Figure 1: Thermoacoustic device
I. Prime mover vs. heat pump or refrigerator:A thermoacoustic prime mover absorbs heat at a high temperature and exhausts heat at a lowertemperature while producing work as an output. A refrigerator or heat pump absorbs heatat a low temperature and requires the input of mechanical work to exhaustmore heat to ahigher temperature (Fig. 2). The only difference between a heat pump and a refrigerator iswhether the purpose of the device is to extract heat at the lower temperature(refrigeration) orto reject heat at the higher temperature (heating). Therefore, from now on, when we talk abouta thermoacoustic refrigerator we mean either a refrigerator or a heat pump. Often the termthermoacoustic engine is used as well, either to indicate a thermoacoustic prime mover or as ageneral term to describe all thermoacoustic devices. To avoid confusion, we will refrain fromusing the term thermoacoustic engine.
2

TH
QH
DeviceW
QC
TC
(a) Prime mover
TH
QH
DeviceW
QC
TC
(b) Refrigerator or heat pump
Figure 2: The flows of work and heat inside (a) a thermoacoustic prime mover and (b) a thermoacoustic refrig-erator or heat pump
II. Stack-based devices vs. regenerator-based devices:A second classification depends on wether the porous medium used to exchange heat with theworking fluid is a ”stack” or a ” regenerator”. Inside a regenerator thepore size is much smallerthan inside a stack. Garrett [4] uses the so-called Laucret numberNL to indicate the differencebetween a stack and regenerator. The Laucret number is defined as theratio between the halfpore size and the thermal penetration depth1. If NL & 1 the porous medium is called a stackand if NL ≪ 1 it is called a regenerator. This definition of stacks and regenerators is slightlydifferent from Garret’s2, but is chosen to stress that the pore size inside a regenerator is verysmall.
III. Standing-wave devices vs. traveling-wave devices:Finally thermoacoustic devices can also be categorized depending on whether there is a travel-ing or a standing sound wave inside the thermoacoustic device. In section 3.1.7 we show that itis beneficiary to use a stack inside a standing-wave device and a regenerator inside a traveling-wave device. Therefore one could also classify thermoacoustic devicesas either standing-wavestack-based devices or traveling-wave regenerator-based devices.
1.3 Basic principle of the thermoacoustic effect
The thermoacoustic effect can be understood by following a given parcel of fluid as it moves throughthe stack or regenator. Fig. 3 displays the (idealized) cycles a typical fluidparcel goes through as itoscillates alongside the plate. The fluid parcel follows a four-step cycle which depends on the kind ofdevice.
• Stack-based devices:The basic thermodynamic cycle in a stack-based acoustic refrigerator or prime mover consists oftwo reversible adiabatic steps (step 1,3 in Fig. 3(a,b)) and two irreversible isobaric heat-transfersteps (step 2,4 in Fig. 3(a,b)).
As NL & 1, there will be an imperfect thermal contact between the fluid and the solid. Asa result a phase shift, or time delay, arises between the pressure and the temperature of thegas parcels that are at a distance of a few thermal penetration depths from the stack plate.
1The thermal penetration depth is the distance heat can diffuse through within a characteristic time2Garrett defines the porous medium to be a stack ifNL ≥ 1, and a regenerator ifNL < 1
3

1 - Compression
−→
2 - Cooling
δQ1
δW1
3 - Expansion
←−
4 - Heating
δQ2
δW2
(a) Stack-based refrigerator(small∇T )
1 - Compression
−→
2 - Heating
δQ1
δW1
3 - Expansion
←
4 - Cooling
δQ2
δW2
(b) Stack-based prime mover(large∇T )
1 - Heating
δQ1
δW1
−→
2 - Compression
3 - Cooling
δQ2
δW2
←−
4 - Expansion
(c) Regenerator-based refrig-erator (small∇T )
1 - Heating
δQ1
δW1
−→
2 - Expansion
3 - Cooling
δQ2
δW2
←
4 - Compression
(d) Regenerator-based primemover (large∇T )
Figure 3: Typical fluid parcels executing the four steps (1-4) of the thermodynamic cycle in (a) a stack-basedstanding-wave refrigerator, (b) a stack-based standing wave prime mover, (c) a regenerator-basedtraveling wave refrigerator and (d) a regenerator-based traveling wave prime mover.
4

Parcels that are farther away have no thermal contact and are simply compressed and expandedadiabatically and reversibly by the sound wave. Therefore parcels thatare about a thermalpenetration depth away from the plate have good enough thermal contact toexchange someheat with the plate, but at the same time are in poor enough contact to producea time delaybetween motion and heat transfer.
The fact that the operation of stack-based thermoacoustic devices requires pressure and dis-placement to be primarily in phase, explains why stack-based devices are also called standing-wave devices.
The difference between the prime-mover and the refrigerator depends on the magnitude of thetemperature gradient along the stack plates. During compression (step 1) the fluid parcel is bothwarmed (adiabatically) and displaced along the plate. Next, if the temperature gradient alongthe stack is large enough, the plate temperature will be larger than the fluid parcel temperature.Hence heat will flow from the plate to the fluid (step 2). This is the case in Fig. 3(b). Thenthe parcel expands and moves back to the original position (step 3). There the temperature ofthe parcel will still be higher than the plate temperature and heat will flow fromthe fluid to theplate (step 4). As a result heat is transported from a high to a low temperature, thus producinga certain amount of work. In other words the device acts as a prime mover. Similarly if thetemperature gradient along the plate is small enough, we find that heat is transported from a lowto a high temperature, thus requiring a certain amount of work. Thereforethe cycle shown inFig. 3(a) corresponds to a refrigerator.
Thus we find that a low temperature gradient along the plate is the condition fora refrigeratorand a high temperature gradient is the condition for a prime mover. The criticaltemperaturegradient is where the temperature change along the plate just matches the adiabatic temperaturechange of the fluid parcel.
• Regenerator-based devices:The basic thermodynamic cycle in a regenerator-based acoustic refrigerator or prime moverconsists of two isochoric displacement steps during which heat is exchanged (step 1,3 in Fig.3(c,d)) and two isothermal compression and expansion steps (step 2,4 in Fig. 3(c,d)).
Because the pores in a regenerator are so small compared tot the thermal penetration depth,there will be an almost perfect thermal contact between the fluid and the solid. Therefore duringthe motion (step 2, 4) the temperature of the wall and the fluid parcel will be the same. As aresult there will be a continuous exchange of heat between the gas and the solid, which takesplace over a vanishingly small temperature difference and therefore onlya negligibly amount ofentropy is created. During the compression and expansion (step 1,3), thetemperature remainsconstant.
The gas oscillating inside a regenerator requires the same phasing betweenpressure and velocityas a traveling acoustic wave. Therefore regenerator-based devicesare also called traveling-wavedevices.
The main advantage of regenerator-based devices with respect to stack-based devices is thatthere are no irreversible processes, so that the ideal efficiency is equal to the Carnot efficiency.On the other hand, because the pores are so narrow, there may be significant viscous dissipationwhich could lower the efficiency dramatically.
Usually the displacement of one fluid parcel is small with respect to the length of the plate. Thusthere wil be an entire train of adjacent fluid parcels, each confined to a short region of length2x1 and
5

passing on heat as in a bucket brigade (Fig. 4). Although a single parcel transports heatδQ over avery small interval,δQ is shuttled along the entire plate because there are many parcels in series.
QC
TC L TH
QH
2x1 2x1 2x1
δQ
︸ ︷︷ ︸
W
Figure 4: Work and heat flow inside a thermoacoustic refrigerator. Theoscillating fluid parcels work as abucket brigade, shuttling heat along the stack plate from one parcel of gas to the next. As a resultheatQ is transported from the left to the right, using workW . Inside a prime mover the arrows willbe reversed, i.e. heatQ is transported from the right to the left and workW is produced.
1.4 Scope
Motivated by the work of Swift [21], [23] and Tijani [24], this paper tries to reconstruct the lineartheory of thermoacoustics in a systematic and consistent manner using dimensional analysis and smallparameter asymptotics.
We will start in section 2 with a detailed description of the model and an overviewof the governingequations and boundary conditions. Then in section 3 we try to solve the equations assuming there isno mean steady flow. This is done both for stack- and regenerator-based devices. This is repeated insection 4, but now with a mean steady flow. Finally section 5 shows the different energy flows andtheir interaction in thermoacoustic devices.
2. General thermoacoustic theory
We will model the thermoacoustic devices as depicted in Fig. 5 (see also [21] and [24]), where thedevice is modeled as an acoustically resonant tube, containing a gas and a porous solid medium. Fornow we will not make any assumptions on whether the tube is open or closed. The porous medium ismodeled as a stack of parallel plates, each of thickness2l and lengthL. The space between the platesis equal to2R.
2.1 Governing equations
We will focus on what happens inside the stack. The general equations describing the thermodynamicbehavior are [6]
ρ
[∂v
∂t+ (v · ∇)v
]
= −∇p + µ∇2v +(
ξ +µ
3
)
∇(∇ · v), (2.1.1)
∂ρ
∂t+ ∇ · (ρv) = 0, (2.1.2)
6

gas
Stack ofparallel plates
Hot heatexchanger
Cold heatexchanger
(a) Overall view
etc.
Plate
Gas
Plate2lxy′
Gas2Rxy
Plate
L
(b) Expanded view of stack
Figure 5: A thermoacoustic device modelled as an acoustically resonant tube, containing a gas, a stack ofparallel plates and heat exchangers at both sides of the stack.
ρcp
(
∂T
∂t+ v · ∇T
)
− βT
(∂p
∂t+ v · ∇p
)
= K∇ · (∇T ) + Σ:∇v. (2.1.3)
Hereρ is the density,v is the velocity,p is the pressure,T is the temperature,s is the entropy per unitmass,µ andξ are the dynamic (shear) and second (bulk) viscosity, respectively;K is the gas thermalconductivity,cp is the specific heat per unit mass,β is the thermal expansion coefficient andΣ is theviscous stress tensor, with components
Σij = µ
(∂vi
∂xj+
∂vj
∂xi− 2
3δij
∂vk
∂xk
)
+ ξδij∂vk
∂xk
. (2.1.4)
Furthermoreρ is related top andT according to (A.4.9)
dρ =γ
c2dp − ρβ dT . (2.1.5)
Finally, the temperatureTs in the plates satisfies the diffusion equation
ρscs∂Ts
∂t= Ks∇
2Ts, (2.1.6)
whereKs, cs andρs are the thermal conductivity, the specific heat per unit mass and the densityofthe stack’s material, respectively.
These equations will be linearized and simplified using the following assumptions
• The theory is linear; second-order effects, such as acoustic streamingand turbulence, are ne-glected.
• The plates are fixed and rigid.
• The temperature variations along the stack are much smaller than the absolute temperature.
7

• The temperature dependence of viscosity is neglected.
• Oscillating variables have harmonic time dependence at a single angular frequencyω.
At the boundaries we impose the no-slip condition
v = 0, y = ±R. (2.1.7)
The temperatures in the plates and in the gas are coupled at the solid-gas interface where continuityof temperature and heat fluxes is imposed.
T∣∣∣y=±R
= Ts
∣∣∣y′=∓l
=: Tb(x), (2.1.8a)
K
(
∂T
∂y
)
y=±R
= Ks
(
∂Ts
∂y′
)
y′=∓l
, (2.1.8b)
We do not impose any conditions at the stack ends, as we are mainly interestedabout what happensinside the stack, ignoring any entrance effects.
The next step is the rescaling of the variables in (2.1.1), (2.1.2) and (2.1.3)such that the equationsare dimensionless. We assume a 2D-model and rescale as follows
x = Lx, y = Ry, y′ = ly′, t =L
Ct, (2.1.9a)
u = Cu, v = εCv, p = DC2p, ρ = Dρ, T =C2
cpT, (2.1.9b)
ρs = Dsρs, Ts =C2
cpTs, (2.1.9c)
c = Cc, β =cp
C2β, (2.1.9d)
whereC is a typical speed of sound,D andDs are typical densities for the fluid and solid, respectively,andε is the aspect ratio of a stack pore defined as
ε = R/L ≪ 1. (2.1.10)
Clearly, ε is a dimensionless parameter. In total there are 14 physical parameters in thisproblemexpressible in 5 independent fundamental physical quantities. Therefore, using the Buckinghamπtheorem [1], we know that 9 independent dimensionless parameters can be constructed from the orig-inal 14 parameters. In addition toε, we will use the following dimensionless parameters:
ε1 = l/L, ϑ =RKs
lK, ω =
ωL
C, γ =
cp
cv, (2.1.11a)
A =U
C, Wo =
√2
R
δν, NL =
R
δk
, Ns =l
δs, P r =
2N2L
Wo2. (2.1.11b)
wherecv is the isochoric specific heat,λ = 2πc/ω is the wavelength,ω is the frequency,U is a typicalfluid speed,A is a Mach number,Pr is the Prandtl number,Wo is the Womersley number andNL andNs are the Lautrec numbers (as defined by Garrett [4]) related to the fluid and solid, respectively. Here
8

the parametersδν , δk andδs are the viscous penetration depth, and the thermal penetration depths forthe fluid and solid, respectively.
δν =
√
2ν
ω, δk =
√
2κ
ω, δs =
√
2κs
ω. (2.1.12)
Hereν = µ/D is the kinematic viscosity andκ = K/(Dcp) is the thermal diffusivity of the fluid.It can be shown that the first 8 of the dimensionless parameters in (2.1.11) together withε form 9independent dimensionless parameters. Obviously the Prandtl number is determined completely bythe Womersley and Laucret number.
We will use the following weakly non-linear expansion for the fluid variablesin powers of theamplitudeA of the acoustic velocity oscillations.
q(x, y, t) = q0(x, y) +∞∑
k=1
Akq′k(x, y, t), A ≪ 1. (2.1.13)
where we assume a small amplitudeA and a harmonic time-dependence forq1 with dimensionlessfrequencyω (Helmholtz number), so that we can write
q′1(x, y, t) = Re[q1(x, y)eiωt
]. (2.1.14)
We use the term weakly non-linear to indicate that, although we assume small amplitudes, we still in-clude terms of higher order inA. In dimensionless form we obtain the following system of equations
∂ρ
∂t+
∂(ρu)
∂x+
∂(ρv)
∂y= 0, (2.1.15)
ρ
(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)
= −∂p
∂x+
ω
Wo2
(
ε2 ∂2u
∂x2+
∂2u
∂y2
)
+εω
Wo2
(ξ
µ+
1
3
)(∂2u
∂x2+
∂2v
∂x∂y
)
, (2.1.16)
ε2ρ
(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)
= −∂p
∂y+
ε2ω
Wo2
(
ε2 ∂2v
∂x2+
∂2v
∂y2
)
+ε2ω
Wo2
(ξ
µ+
1
3
)(∂2u
∂x∂y+
∂2v
∂y2
)
, (2.1.17)
ρ
(∂T
∂t+ u
∂T
∂x+ v
∂T
∂y
)
− βT
(∂p
∂t+ u
∂p
∂x+ v
∂p
∂y
)
=ω
2N2L
(
ε2 ∂2T
∂x2+
∂2T
∂y2
)
+ω
Wo2
[(∂u
∂y
)2
+ O(ε)
]
. (2.1.18)
ρs∂Ts
∂t=
ω
2N2s
(
ε21
∂2Ts
∂x2+
∂2Ts
∂y′2
)
, (2.1.19)
ρ1 = −ρ0βT1 +γ
c2p1. (2.1.20)
9

subject to
v|y=±1 = 0, (2.1.21a)
T |y=±1 = Ts|y′=∓1 =: Tb(x), (2.1.21b)
∂T
∂y
∣∣∣∣y=±1
= ϑ∂Ts
∂y′
∣∣∣∣y′=∓1
. (2.1.21c)
3. Thermoacoustic devices without mean velocity
This chapter discusses thermoacoustic devices in the absence of a steadymean velocity. This will bedone both for stack-based and regenerator-based devices.
To solve the equations given in the previous section we need to know the magnitude of the dimen-sionless parameters involved. First note that
ω =ωL
C=
cL
Cλ=
cL
λ∼ L
λ. (3.0.22)
Here we will make the ”short-stack” approximationL ≪ λ (ω ≪ 1), where the stack is considered tobe short compared to the engine with the restriction thatω is the largest among the small parameters.
The Womersley number and the Laucret number are related by2N2L = PrWo2. The Prandtl
number only depends on material parameters and is usually close to 1. As a resultNL andWo shouldbe of the same order of magnitude. Normally in standing wave machinesR ∼ δk (stack) and intraveling wave machinesR ≪ δk (regenerator). Also we assume thatNs ∼ NL.
Furthermore we assume that the amplitudes of the acoustic oscillations can be taken arbitrarilysmall, with the restriction thatε2 ≪ A, so that∂2q0/∂x2 can be neglected with respect to∂2q1/∂y2
(O(ε2) versusO(A)). Swift[21] and Tijani [24] also treated this case, although they did not makethese assumptions explicit. Finally, we also have
ϑ = O(1). (3.0.23)
Otherwise, from (2.1.21c) there would be no relation between the heat fluxof the gas and the heat fluxof the stack at the stack-gas interface.
Summarizing we have
ε21 ≪ ε2 ≪ A ≪ ω2 ≪ 1, ϑ = O(1) (3.0.24)
and
Wo ∼ 1, NL ∼ 1, Ns ∼ 1, for a stack, (3.0.25)
Wo ≪ 1, NL ≪ 1, Ns ≪ 1, for a regenerator. (3.0.26)
The presence ofω as a small parameter suggests the following alternative expansions for the fluidvariablesq
q = q0(x, y) + ARe[(
q10(x, y) + ωq11(x, y) + ω2q12(x, y))eiωt]+ · · · . (3.0.27)
Moreover, we assumev0 = 0. Note that the terms second order inA can be neglected sinceA ≪ω2 ≪ 1.
10

3.1 Short Stack
In this section we will restrict ourselves to the case of a stack, i.e.
Wo ∼ 1, NL ∼ 1, Ns ∼ 1. (3.1.1)
3.1.1 The horizontal velocityu1
Substitute the expansions given in (3.0.27) in they-component of the momentum equation (2.1.17).Collecting, the zeroth order terms we find∂p0/∂y = 0. Next collecting terms up to orderAω2 wealso find
A∂p10
∂y+ Aω
∂p11
∂y+ Aω2 ∂p12
∂y= 0. (3.1.2)
This equation can only be satisfied if
∂p10
∂y=
∂p11
∂y=
∂p12
∂y= 0. (3.1.3)
We do the same for thex-component (2.1.16). The zeroth order equation yields∂p0/∂x = 0. Keepingterms of order up toAω2 we obtain
iAωρ0(u10 + ωu11) = −Adp10
dx− Aω
dp11
dx− Aω2 dp12
dx
+Aω
Wo2
(∂2u10
∂y2+ ω
∂2u11
∂y2
)
, (3.1.4)
Collecting terms of orderA we find that∂p10/∂x = 0. Hence
p = p0 + ARe[(p10 + ωp11(x)) eiωt
]+ · · · . (3.1.5)
Next, collecting the terms of orderAω andAω2, we find thatu10 andu11 satisfy
iρ0u10 = −dp11
dx+
1
Wo2
∂2u10
∂y2. (3.1.6)
iρ0u11 = −dp12
dx+
1
Wo2
∂2u11
∂y2. (3.1.7)
and applying the boundary conditionsu1(x,±1) = 0, we obtain
u10(x, y) =i
ρ0
dp11
dx
[
1 − cosh(ανy)
cosh(αν)
]
, (3.1.8)
u11(x, y) =i
ρ0
dp12
dx
[
1 − cosh(ανy)
cosh(αν)
]
, (3.1.9)
where
αν = (1 + i)√
ρ0R
δν= (1 + i)
√ρ0
2Wo. (3.1.10)
This coincides with the solution found by Swift [21] and Tijani [24] in a dimensional form.
11

3.1.2 The temperatureTs in the plate
Using the rescaled energy equation (2.1.18) and the diffusion equation (2.1.19) we will try to findT andTs. First we solve (2.1.19) subject to (2.1.21b). Substitute the expansions from (3.0.27) into(2.1.19). To leading order we find that∂2Ts0/∂y′2 = 0. That meansTs0 is at most linear iny′. Inview of symmetry we find thatTs0
is in fact constant iny′, i.e.
Ts(x, y′, t) = Ts0(x) + ARe
[(Ts10
(x, y′) + ωTs11(x, y′)
)eiωt]+ · · · , (3.1.11)
Sinceρs0= ρs0
(p0, Ts0), we assume that also
ρs(x, y′, t) = ρs0(x) + ARe
[(ρs10
(x, y′) + ωρs11(x, y′)
)eiωt]+ · · · , (3.1.12)
Collecting terms of orderA we find
2iρs0N2
s Ts10=
∂2Ts10
∂y′2. (3.1.13)
Imposing (2.1.21b)
Ts10(x,±1) = Tb10(x), (3.1.14)
we find that the solution to(3.1.13) is given by
Ts10(x, y′) = Tb10(x)
cosh(αsy′)
cosh(αs), (3.1.15)
where
αs = (1 + i)ρs0
l
δs= (1 + i)ρs0
Ns. (3.1.16)
The exact expression forTb10 should be determined from matchingTs with T .
3.1.3 The temperatureT between the plates
We substitute the expansions shown in (2.1.13) into equation (2.1.18). To leading order we find∂2T0/∂y2 = 0. That meansT0 is at most linear iny. In view of symmetry we find thatT0 is in factconstant iny. Therefore we expandT as
T (x, y, t) = T0(x) + ARe[(T10(x, y) + ωT11(x, y)) eiωt
]+ · · · , (3.1.17)
Sinceρ0 = ρ0(p0, T0), we assume that also
ρ(x, y, t) = ρ0(x) + ARe[(ρ10(x, y) + ωρ11(x, y)) eiωt
]+ · · · , (3.1.18)
Collecting terms of orderA, we find
ρ0u10dT0
dx= 0 ⇒
u10 = 0,
dp11
dx= 0.
(3.1.19)
12

Finally, collecting terms of orderAω we obtain
ρ0u11dT0
dx+ iρ0T10 − iβT0p10 =
1
2N2L
∂2T10
∂y2. (3.1.20)
Inserting the expression foru11 given in (3.1.9), we obtain[
1 − cosh(ανy)
cosh(αν)
]dT0
dx
dp12
dx+ iρ0T10 − iβT0p10 =
1
2N2L
∂2T10
∂y2. (3.1.21)
Applying the boundary conditions in (2.1.21), we can solve (3.1.21)
T10(x, y) =βT0
ρ0p10 −
1
ρ0
dT0
dx
dp12
dx
[
1 − Pr
Pr − 1
cosh(ανy)
cosh(αν)
]
−(
βT0
ρ0p10 +
1
ρ0
1 + εsfν
fk
Pr − 1
dT0
dx
dp12
dx
)
cosh(αky)
(1 + εs) cosh(αk), (3.1.22)
where
αk = (1 + i)√
ρ0R
δk
= (1 + i)√
ρ0NL, (3.1.23)
εs =
√Kρ0cp tanh(αk)√
Ksρs0cs tanh(αs), fν =
tanh(αν)
αν, fk =
tanh(αk)
αk. (3.1.24)
As a result we also find
Ts10(x, y′) =
εs
1 + εs
(
βT0
ρ0p10 +
1
ρ0
dT0
dx
dp12
dx
1 − fν
fk
Pr − 1
)
cosh(αsy′)
cosh(αs). (3.1.25)
Note that if we had takenA ≪ ε2 (compare with (3.0.24)), i.e. the amplitudes of the oscillationscan be taken arbitrarily small, then the termd2T0/dx2 will appear in the equations. Then, for theequations to be satisfied, we must have thatT0 is linear inx (andTs0
(x) = T0(x)).
3.1.4 The pressurep
In order to derive Rott’s wave equation, we start with the continuity equation. Restricted to terms oforder up toAω, the rescaled continuity equation yields
iAωρ10 + Aω∂
∂x(ρ0u11) + Aωρ0
∂v11
∂y+ Aρ0
∂v10
∂y= 0, (3.1.26)
To leading order we find
ρ0∂v10
∂y= 0 ⇒ v10 = 0, (3.1.27)
where we applied the boundary conditionv10(±1) = 0). Now to leading order, we obtain
iρ1 +∂
∂x(ρ0u11) + ρ0
∂v11
∂y= 0, (3.1.28)
13

Using thex-derivative of equation (3.1.7), the equation of state (2.1.20), and inserting the expressionsfor T1 andu1, we finally find
(
β2T0 −γ
c2
)
p10 − βdT0
dx
dp12
dx
[
1 − Pr
Pr − 1
cosh(ανy)
cosh(αν)
]
−(
β2T0p10 + β1 + εs
fν
fk
Pr − 1
dT0
dx
dp12
dx
)
cosh(αky)
(1 + εs) cosh(αk)− d2p12
dx2+
1
Wo2
∂3u11
∂x∂y2
+ iρ0∂v11
∂y= 0. (3.1.29)
Next we integrate with respect toy from 0 to1. Note thatv(x, 0) = 0 because of symmetry. Finallywe obtain
i
c2
[
1 +γ − 1
1 + εsfk − (c2β2T0 − γ + 1)
(
1 − fk
1 + εs
)]
p10
+fk − fν
(Pr − 1)(1 + εs)β
dT0
dx
dp12
dx+ ρ0
d
dx
(1 − fν
ρ0
dp12
dx
)
= 0, (3.1.30)
where we used
ρ0d
dx
(1
ρ0
)
= − 1
ρ0
dρ0
dx= − 1
ρ0
∂ρ0
∂T0
dT0
dx= β
dT0
dx. (3.1.31)
Furthermore, if we impose the dimensionless equivalent of relation (A.4.6)
c2β2T0 = γ − 1, (3.1.32)
then (3.1.30) transforms into Rott’s wave equation (dimensionless)
1
c2
[
1 +γ − 1
1 + εsfk
]
p10 +fk − fν
(Pr − 1)(1 + εs)β
dT0
dx
dp12
dx+ ρ0
d
dx
(1 − fν
ρ0
dp12
dx
)
= 0. (3.1.33)
This result was also found by Rott [16], Swift [21] and Tijani [24]. For an ideal gas and ideal stackwith εs = 0 this result was first obtained in [15].
3.1.5 Acoustic power
The time-averaged acoustic powerd ˙W used (or produced in the case of a prime mover) in a segmentof lengthdx can be found from
d ˙W
dx= Ag
d
dx
[
〈p′1u′1〉]
, (3.1.34)
where the overbar indicates time average (over one period), brackets〈 〉 indicate averaging in they-
direction andAg is the cross-sectional area of the gas within the stack. Next˙W andAg are rescaledas
˙W = R2DC3W , Ag = R2Ag. (3.1.35)
14

As p is independent ofy, we find
dW
dx= A2Ag
d
dx
[
p′1〈u′1〉]
(3.1.36)
It can be shown that the productp′1〈u′1〉 satisfies
p′1〈u′1〉 =
1
2Re [p1〈u∗
1〉] , (3.1.37)
where the star denotes complex conjugation. Inserting (3.1.37) into (3.1.36)yields
dW
dx=
1
2A2AgRe
[
p1d〈u∗
1〉dx
+ 〈u∗1〉
dp1
dx
]
. (3.1.38)
Next, inserting (3.0.27), we find
dW
dx=
1
2A2ωAgRe
[
p10d〈u∗
11〉dx
]
+ · · · . (3.1.39)
Combining equations (3.1.9) and (3.1.33), we find
dp12
dx= − iρ0〈u11〉
(1 − fν), (3.1.40)
and
d〈u11〉dx
= id
dx
(1 − fν
ρ0
dp12
dx
)
= − i
ρ0c2
[
1 +γ − 1
1 + εsfk
]
p10 −fk − fν
(Pr − 1)(1 + εs)(1 − fν)β
dT0
dx〈u11〉, (3.1.41)
As a result we find
dW
dx=
1
2A2ωAg
[1
ρ0c2
γ − 1
1 + εsIm (fk) |p10|2
− β
Pr − 1
dT0
dxRe
(f∗
k − f∗ν
(1 + ε∗s)(1 − f∗ν )
p10〈u∗11〉)]
+ · · · . (3.1.42)
This is a quantity of orderA2ω, therefore we defineW21 by
dW21
dx=
1
2Ag
[1
ρ0c2
γ − 1
1 + εsIm (fk) |p10|2 − β
Pr − 1
dT0
dxRe
(f∗
k − f∗ν
(1 + ε∗s)(1 − f∗ν )
p10〈u∗11〉)]
,
(3.1.43)
where the subscript 21 is used to indicate second order inA and first order inω.The first term is the thermal relaxation dissipation term. This term is present whenever a wave
interacts with a solid surface, and has a dissipative effect in thermoacoustics. The second term con-tains the temperature gradientdT0/dx and is called the source or sink term because it either absorbs(refrigerator) or produces acoustic power (prime mover). This term is the unique contribution tothermoacoustics.
15

3.1.6 The dissipation in acoustic power
One could repeat the previous analysis for a long stack (ω = O(1)) as well, in which case we get
dW2
dx=
1
2Ag
{ωρ0Im(fν)
|1 − fν |2|〈u1〉|2 + ω
γ − 1
ρ0c2Im
[f∗
k
1 + ε∗s
]
|p1|2
− β
Pr − 1
dT0
dxRe
[f∗
k − f∗ν
(1 − f∗ν )(1 + ε∗s)
p1〈u∗1〉]}
. (3.1.44)
This expression contains an additional term, representing the viscous dissipation, which we do not seein (3.1.43). To see the effect of reducing the pore size, we test how (3.1.44) behaves for smallNL. Itcan be shown that for smallω andNL (3.1.43) behaves as
dW2
dx= sink term − viscous dissipation− thermal dissipation relaxation
= O(ω) − O(
ω3
N2L
)
− O(ωN2
L
).
(3.1.45)
Dissipation is usually undesirable, so the dissipation terms should be smaller thanthe sink term. Thisgives the inequalities
ω ≪ NL ≪ 1. (3.1.46)
If ω andNL satisfy this equation, then viscous and thermal relaxation dissipation can be neglectedwith respect to the sink term. In other words reducing the pore size reduces the thermal relaxationdissipation and increases the viscous dissipation. However, the latter can be prevented by taking thestack short enough, as indicated in (3.1.46).
3.1.7 The sink/source term in acoustic power
We saw in (3.1.43) that the sink/source term, which we will define asW s21, was of greatest interest
in thermoacoustic engines and refrigerators. To interpretW s21 we will assumeεs = 0 and neglect
viscosity, so thatfν = 0 andPr = 0,
dW s21
dx=
Agβ
2
dT0
dx[Re (fk) Re (p10〈u∗
11〉) + Im (−fk) Im (p10〈u∗11〉)] . (3.1.47)
In a standing wave systemIm (p10〈u∗11〉) is large and thereforeIm (−fk) is important. Fig. 6
shows that the maximal value is attained forNL ∼ 1, which is exactly the condition assumed for astack in a standing wave system. In the case of a traveling wave systemRe (p10〈u∗
11〉) is large andRe (fk) is important. Fig. 6 shows thatRe (fk) reaches its maximal value forNL ≪ 1, which wasthe condition for a regenerator.
3.1.8 Time-averaged energy fluxE
Finally we will derive an expression for the time-averaged energy flux˙E in the stack, correct tosecond order inA. We consider the thermoacoustic refrigerator as shown in Fig. 5(a), driven by aloudspeaker. We assume that the refrigerator is thermally insulated from thesurroundings, except at
16

0 1 2 3 4 5 6−0.5
0
0.5
1
NL
fk
real partimaginary part
Figure 6: Real and imaginary part offk, plotted as a function of the Laucret numberNL.
the two heat exchangers, so that heat can be exchanged with the outsideworld only via the two heatexchangers. Work can only be exchanged at the loudspeaker piston.
By conservation of energy we have (A.5.6)
∂
∂t
(1
2ρv2 + ρǫ
)
= −∇ ·[
v
(1
2ρv2 + ρh
)
− K∇T − v · Σ
]
, (3.1.48)
whereǫ andh are the internal energy and enthalpy per unit mass, respectively andΣ is the viscousstress tensor as defined in (2.1.4). The expression on the left represents the rate-of-change of theenergy in a unit volume of the fluid, while that on the right is the divergence of the energy flux densitywhich consists of transfer of mass by the motion of the fluid, transfer of heat and energy flux dueto internal friction, respectively. In steady state, for a cyclic refrigerator (prime mover) without heat
flows to the surroundings, the time-averaged energy flux˙E2 (correct up to second order) alongx mustbe independent ofx. Assuming steady state, integrating (3.1.48) with respect toy (andy′) from y = 0to y′ = 0 and time-averaging yields
d
dx
[∫ R
0ρuv2 dy +
∫ R
0ρuh dy −
∫ R
0K
∂T
∂xdy −
∫ l
0Ks
∂Ts
∂xdy′
−∫ R
0uΣ11 + vΣ21 dy
]
= 0. (3.1.49)
The quantity within the square brackets is˙E/Π, the time-averaged energy flux per unit perimeteralongx. Rescaling yields
E
Π= ε2
∫ 1
0ρuv2 dy +
∫ 1
0ρuh dy − ε2ω
2N2L
∫ 1
0
∂T
∂xdy − ϑε2
1ω
2N2L
∫ l
0
∂T s
∂xdy′
− εω
Wo2
∫ 1
0u
∂u
∂y
[1 + O(ε2)
]dy, (3.1.50)
17

where ˙E, h andΠ were rescaled as
˙E = R2DC3E, h = C2h, s = cps, Π = RΠ. (3.1.51)
The second integral on the right hand side, can be written up two second order as follows.
ρuh = Aρ0h0u′1 + A2ρ0h0u′
2 + A2h0ρ′1u′1 + A2ρ0h′
1u′1 + · · · . (3.1.52)
The first term disappears becauseu′1 = Re [u1eit] = 0. The second term is zero because the second
order time-averaged mass flux is zero∫ 1
0(ρ0u2 + ρ1u1) dy = 0. (3.1.53)
Therefore, inserting the relation
dh = Tds +1
ρdp = dT +
1
ρ(1 − βT )dp, (3.1.54)
we obtain
E
Π= A3ε2
∫ 1
0ρ0u1v2
1 dy + A2
∫ 1
0(ρ0T0u1s1 + p1u1) dy
−(ε2 + ϑε2
1
) ω
2N2L
dT0
dx− A2ε
ω
Wo2
∫ 1
0u1
∂u1
∂ydy, (3.1.55)
Clearly the first and last term on the right hand side can be neglected with respect to the second term.As a result we are left with
E
Π= A2
∫ 1
0ρ0u′
1s′1 dy + A2
∫ 1
0p′1u
′1 dy −
(ε2 + ϑε2
1
) ω
2N2L
dT0
dx(3.1.56)
= A2
∫ 1
0ρ0u′
1T′1 dy + A2
∫ 1
0(1 − βT0)p′1u
′1 dy −
(ε2 + ϑε2
1
) ω
2N2L
dT0
dx. (3.1.57)
Substituting the expansions given in (3.0.27) we find
E =1
2A2ωAg
∫ 1
0ρ0Re [u∗
11T10] dy +1
2A2ωAg
∫ 1
0(1 − βT0)Re [p10u
∗11] dy
− (ε2 + ϑε21)ω
Ag
2N2L
dT0
dx+ · · ·
=:(ε2 + ϑε2
1
)ωE012 + A2ωE210 + · · · . (3.1.58)
with E012 andE210 defined as
E012 = − Ag
2N2L
dT0
dx, (3.1.59)
E210 =Ag
2
∫ 1
0ρ0Re [u∗
11T10] dy +Ag
2
∫ 1
0(1 − βT0)Re [p10u
∗11] dy, (3.1.60)
18

where the index 012 indicates second order inε2 andε21 and first order inω, and the index 210 indicates
second order inA and first order inω. Inserting the expression obtained forT10 into (3.1.60), we find
E210 =Ag
2Re
[
p10〈u∗11〉(
1 − βT0(fk − f∗ν )
(1 + εs)(1 − f∗ν )(1 + Pr)
)]
+Agρ0|〈u11〉|2
2(1 − Pr)|1 − fν |2dT0
dxIm
[
f∗ν +
(1 + εsfν
fk)(fk − f∗
ν )
(1 + εs)(Pr + 1)
]
. (3.1.61)
E012 represents the contribution of the conduction of heat through gas and stack material to thetotal energy flux andE210 represents the contribution of the thermoacoustic heat flow. Thereforewe find in the case of a short stack with the assumptions given in (3.0.24), that the energy flux isdetermined mainly byE210.
3.2 Short Regenerator
In the previous section we considered the case of a stack, where the Laucret and Womersley numberwere of order 1. Here we will discuss the regenerator, for whichWo andNL are very small. Thereforewe have to relateWo andNL to the other small parameters in (3.0.24). In section 3.1.6 we saw that toreduce viscous dissipationNL should satisfyω ≪ NL ≪ 1. The remaining assumptions are slightlyaltered, so that
ε21
ω≪ ε2
ω≪ A ≪ ω2 ≪ N2
L ≪ 1, ϑ, Pr = O(1), (3.2.1)
We expand the fluid variables in the same way as we did in (3.0.27) for the short stack
q = q0(x, y) + ARe[(q10(x, y) + ωq11(x, y)) eiωt
]+ · · · . (3.2.2)
3.2.1 The horizontal velocityu1
Substitute the expansions given in (3.0.27) in they-component of the momentum equation (2.1.17).To leading order we find∂p0/∂y = 0. Hence
p = p0 + ARe[(p10(x) + ωp11(x)) eiωt
]+ · · · . (3.2.3)
Next, neglecting terms with order higher thanAω, we obtain
A∂p10
∂y+ Aω
∂p11
∂y= 0. (3.2.4)
This equation can only be satisfied if∂p10/∂y = ∂p11/∂y = 0. We do the same for thex-component(2.1.16). To leading order we find∂p0/∂x = 0. Next, we only keep terms of order up toAω andAω2/Wo2 and neglect higher order terms. This leads to
iAωρ0u10 = −Adp10
dx− Aω
dp11
dx+
Aω
Wo2
(∂2u10
∂y2+ ω
∂2u11
∂y2
)
, (3.2.5)
To solve this equation we have to coupleWo to ω in some way. The most natural choice seems to be
Wo =√
ω ≪ 1 ⇒ ω ≪ NL =
√
2
PrWo ≪ 1. (3.2.6)
19

Different choices are possible, but this choice simplifies the equation significantly and still satisfiesω ≪ NL. To simplify the equations even further, we also assumeNL = Ns. Collecting the terms oforderA, we find thatu10 satisfies
∂2u10
∂y2=
dp10
dx(3.2.7)
and applying the boundary conditionsu10(x,±1) = 0, we obtain
u10(x, y) = −1
2
dp10
dx(1 − y2). (3.2.8)
Finally, collecting the terms of orderAω, we find
− i
2
dp10
dxρ0(1 − y2) = −dp11
dx+
∂2u11
∂y2, (3.2.9)
where we substituted (3.2.8) foru10. Applying the boundary conditionsu11(x,±1) = 0, we obtain
u11(x, y) =i
24
dp10
dxρ0(1 − y2)(5 − y2) − 1
2
dp11
dx(1 − y2). (3.2.10)
3.2.2 The temperatureTs in the plate
Using the rescaled energy equation (2.1.18) and the diffusion equation (2.1.19) we will try to findT andTs. First we solve (2.1.19) subject to (2.1.21b). Substitute the expansions from (3.0.27) into(2.1.19). To leading order we obtain∂2Ts0/∂y′2 = 0. That meansTs0 is at most linear iny′. In viewof symmetry we find thatTs0
is in fact constant iny′, i.e.
Ts(x, y′, t) = Ts0(x) + ARe
[(Ts10
(x, y′) + ωTs11(x, y′)
)eiωt]+ · · · , (3.2.11)
Collecting terms up to orderAω we find
iAωPrρs0Ts10
= A∂2Ts10
∂y′2+ Aω
∂2Ts11
∂y′2= 0. (3.2.12)
Then the terms of orderA yield
∂2Ts10
∂y′2= 0. (3.2.13)
Imposing (2.1.21b) we find
Ts10(x, y′) = Tb10(x), (3.2.14)
Finally, collecting the terms of orderAω, we find
iPrρs0Tb10 =
∂2Ts11
∂y′2. (3.2.15)
Applying the boundary conditions in (2.1.21b) we find
Ts11(x, y′) = − i
2Prρs0
Tb10(x)(1 − y′2
)+ Tb11(x). (3.2.16)
The exact expression forTb10 should be determined from matchingTs with T .
20

3.2.3 The temperatureT between the plates
We substitute the expansions shown in (2.1.13) into equation (2.1.18). To leading order we find∂2T0/∂y2 = 0. That meansT0 is at most linear iny. In view of symmetry we find thatT0 is in factconstant iny. Therefore we expandT as
T (x, y, t) = T0(x) + ARe[(T10(x, y) + ωT11(x, y)) eiωt
]+ · · · , (3.2.17)
Sinceρ0 = ρ0(p0, T0), we assume that also
ρ(x, y, t) = ρ0(x) + ARe[(ρ10(x, y) + ωρ11(x, y)) eiωt
]+ · · · , (3.2.18)
Collecting terms up to orderAω we find
Aρ0u10dT0
dx+ iAωρ0T10 − iAωβT0p10 =
1
Pr
(
A∂2T10
∂y2+ Aω
∂2T11
∂y2
)
. (3.2.19)
Now to leading order we find
ρ0Pr
2
dp10
dx
dT0
dx(y2 − 1) =
∂2T10
∂y2. (3.2.20)
where we substituted the expression foru10 given in (3.1.8). Applying the boundary conditions in(2.1.21b), we find
T10(x, y) = ρ0Pr
24
dp10
dx
dT0
dx
(y4 − 6y2 + 5
)+ Tb10 . (3.2.21)
Now Tb10 still needs to be determined. The remaining boundary conditions in (2.1.21c),however,cannot be satisfied, unless
dp10
dx= 0 ⇒
u10(x, y) = 0
u11(x, y) = −1
2
dp11
dx
(1 − y2
).
(3.2.22)
With (3.2.22) we find
T10(x) = Ts10(x) = Tb10(x), (3.2.23)
whereTb10 is yet to be determined. Finally we turn to theAω-equation. Collecting theAω terms, wefind
iρ0Tb10 − iβT0p10 =1
Pr
∂2T11
∂y2. (3.2.24)
Applying the boundary conditions in (2.1.21b), we find
T11(x, y) = − i
2Pr (ρ0Tb10 − βT0p10)
(1 − y2
)+ Tb11 . (3.2.25)
The boundary conditions in (2.1.21c) lead to
Tb10 =βT0p10
ρ0 + ϑρs0
. (3.2.26)
21

As a result we find
T11(x, y) = iPr
2
ϑρs0βT0p10
ρ0 + ϑρs0
(1 − y2
)+ Tb11 , (3.2.27)
Ts11(x, y′) = −i
Pr
2
βT0p10
ρ0 + ϑρs0
(1 − y′2
)+ Tb11 . (3.2.28)
(3.2.29)
3.2.4 The pressurep
In order to derive Rott’s wave equation, we start with the continuity equation. To leading order therescaled continuity equation yields
ρ0∂v10
∂y= 0 ⇒ v10 = 0, (3.2.30)
where we applied the boundary conditionv10(±1) = 0). Now to leading order, we obtain
iρ10 +∂
∂x(ρ0u11) + ρ0
∂v11
∂y= 0, (3.2.31)
Using equation (3.2.22), the equation of state (2.1.20), and inserting the expressions forT1 andu11
we finally find
−iρ0βTb10 + iγ
c2p10 −
1
2
d2p11
dx2
(1 − y2
)+ ρ0
∂v11
∂y= 0. (3.2.32)
Next we integrate with respect toy from 0 to 1. Note thatv(x, 0) = 0 because of symmetry andv(x, 1) = 0 because of the boundary conditions. We obtain
d
dx
(
ρ0dp11
dx
)
= 3iγ
c2p10 − 3iρ0βTb10 = 3iβ2T0p10
(γ
γ − 1− ρ0
ρ0 + ϑρs0
)
. (3.2.33)
In the last equality we inserted the expression forTb10 and applied thermodynamic expression (A.4.6).Integrating twice with respect toy, we can expressp11 as follows
p11(x) = 3iβ2p10
∫ x
0
∫ ζ
0
T0(ξ)
ρ0(ζ)
(γ
γ − 1− ρ0(ξ)
ρ0(ξ) + ϑρs0(ξ)
)
dξ dζ + A1x + A2. (3.2.34)
The constantsA1 andA2 can be determined if boundary conditions atx = 0 andx = 1 are imposed.During the derivation leading to this result, the following assumptions were used
ε21
ω≪ ε2
ω≪ A ≪ ω2 ≪ 1, ϑ = O(1), ω = Wo2 =
2N2L
Pr=
2N2s
Pr, (3.2.35)
3.2.5 Acoustic power
Remember from the previous section that the time-averaged acoustic powerd ˙W is given by
dW
dx=
1
2A2Ag
d
dx(Re [p1〈u∗
1〉]) (3.2.36)
22

Inserting (3.2.2) into (3.2.36) yields
dW
dx=
1
2A2ωAgRe
[
p10d〈u∗
11〉dx
]
+ · · · . (3.2.37)
Combining equations (3.2.22) and (3.2.33), we find
d〈u11〉dx
= −1
3
d2p11
dx2= − 1
3ρ0
d
dx
(
ρ0dp11
dx
)
+1
3ρ0
dρ0
dx
dp11
dx
= −iβ2 T0p10
ρ0
(γ
γ − 1− ρ0
ρ0 + ϑρs0
)
+ βdT0
dx〈u11〉 (3.2.38)
Inserting this result into (3.2.37), we find
dW
dx=
1
2A2ωAgRe
[
βdT0
dxp10〈u∗
11〉 + iβ2 T0
ρ0
(γ
γ − 1− ρ0
ρ0 + ϑρs0
)
|p10|2]
+ · · ·
=1
2A2ωAgβ
dT0
dxRe [p10〈u∗
11〉] + · · · . (3.2.39)
This is a quantity of orderA2ω, therefore we defineW21 by
dW21
dx=
1
2Agβ
dT0
dxRe [p10〈u∗
11〉] . (3.2.40)
where the subscript 21 is used to indicate second order inA and first order inω.We see that the acoustic power is determined completely by the sink/source term.It can either
absorb (refrigerator) or produce acoustic power (prime mover) depending on the magnitude of thetemperature gradient along the stack. Thus, as expected, not only the viscous dissipation, but also thethermal relaxation dissipation can be neglected. This is due to the perfect thermal contact between thegas and the plate (NL ≪ 1), which was not the case in (3.1.43) for the short stack. Viscous dissipationcan be neglected because the regenerator is short enough (ω ≪ NL).
Moreover, if we look at (3.2.40), then we can see that this exactly coincides with the sink term in(3.1.47), forNL ≪ 1 (Im(−fk) → 0 andRe(fk) → 1).
3.2.6 Time-averaged energy fluxE
In section 3.1.8 we saw that the time-averaged energy fluxE in the stack is given by
E = A2Ag
∫ 1
0ρ0u′
1T′1 dy + A2
∫ 1
0(1 − βT0)p′1u
′1 dy − ε2 + ϑε2
1
Pr
dT0
dx. (3.2.41)
Substituting the expansions given in (3.2.2) we find
E =1
2A2ωAg
∫ 1
0ρ0Re [u∗
11T10] dy +1
2A2ωAg
∫ 1
0(1 − βT0)Re [p10u11∗] dy
− ε2 + ϑε21
PrAg
dT0
dx+ · · ·
=:(ε2 + ϑε2
1
)E002 + A2ωE210 + · · · . (3.2.42)
23

with E002 andE210 defined as
E002 = −Ag
Pr
dT0
dx, (3.2.43)
E210 =Ag
2
∫ 1
0ρ0Re [u∗
11T10] dy +Ag
2
∫ 1
0(1 − βT0)Re [p10u
∗11] dy, (3.2.44)
where the index 002 indicates second order inε2 andε21 and the index 210 indicates second order in
A and first order inω. Inserting the expression obtained forT10 into (3.2.44), we find
E210 =Ag
2
1 + ϑ(1 − βT0)
1 + ϑRe [p10〈u∗
11〉] . (3.2.45)
E002 represents the contribution of the conduction of heat through gas and stack material to thetotal energy flux andE210 represents the contribution of the thermoacoustic heat flow. The termE002
is an undesirable nuisance, but can normally be neglected providedε and ε1 are small enough asassumed in (3.2.1) (ε2 ≪ Aω).
4. Thermoacoustic devices with mean velocity
This chapter discusses thermoacoustic devices in the presence of a steady mean velocity. This willbe done both for stack-based and regenerator-based devices. With the addition of a steady non-zeromean velocity alongx, the gas moves through the tube in a repetitive ”102 steps forward, 98 stepsbackward” manner. As a result we will have to adapt our expansions in (2.1.13) to include a steadymean flowum. However, we still assume thatum = um/C ≪ 1. We include this in our expansion bydemanding
um = Aαum,α + o (Aα) , (4.0.46)
for some constantα > 0 and withum,α 6= 0. This suggests the following alternate expansion forv
and the remaining fluid variablesq
v(x, y, t) =
∞∑
j=1
Aαjvm,αj(x, y) +
∞∑
k=1
Akv′k(x, y, t), (4.0.47a)
q(x, y, t) = qm,0(x, y) +∞∑
j=1
Aαjqm,αj(x, y) +
∞∑
k=1
Akq′k(x, y, t), (4.0.47b)
whereαj = jα andq′1 is assumed to be of the form
q′1(x, y, t) = Re[q1(x, y)eiωt
]. (4.0.48)
We will insert these expansions in the equations and boundary conditions given in (2.1.15)-(2.1.21).
4.1 Short Stack
We will assume the same ordering for the dimensionless parameters as in (3.0.24) for the case withouta mean flow
Wo = O(1), NL = O(1), Ns = O(1), ϑ = O(1), (4.1.1a)
24

ε21 ≪ ε2 ≪ A ≪ ω ≪ 1, (4.1.1b)
and expand the fluid perturbation variablesq1 andqm,α as
q1(x, y) = q10(x, y) + ωq11(x, y) + ω2q12(x, y) + · · · , (4.1.2a)
qm,α(x, y) = qm,α0(x, y) + ωqm,α1(x, y) + ω2qm,α2(x, y) + · · · . (4.1.2b)
4.1.1 The steady horizontal velocity componentum,α
We substitute the expansions (4.0.47) into the time-averaged momentum equation.For they-componentwe find, neglecting higher order terms,
∂pm,0
∂y+ Aα ∂pm,α
∂y= 0. (4.1.3)
Consequently
∂pm,0
∂y=
∂pm,α
∂y= 0. (4.1.4)
For thex-component we find
A2ωRe [iρ1u∗1] + A2ρ0Re
[
u∗1
∂u1
∂x+ v∗1
∂u1
∂y
]
= −dpm,0
dx− Aα dpm,α
dx
+ Aα ω
Wo2
∂2um,α
∂y2. (4.1.5)
To leading order we findpm,0 is constant. Now we can distinguish three casesα < 2, α = 2 andα > 2. We will only consider the first two cases. These are the most interesting cases, since theacoustic power and total energy will hardly be affected by the mean flow ifα > 2. Furthermore, ifα > 2 then the left hand side of this equation would have to be zero, which in general is not the case.Therefore it seems thatα cannot be larger than 2.
α < 2:Aα is the leading term. Collecting theAα terms and expanding inω, we findpm,α0 is constant and
1
Wo2
∂2um,αk
∂y2=
dpm,α(k+1)
dx, for all k with Aτ ≪ ωk+1, (4.1.6)
whereτ = min{α, 2 − α}. Next, integrating twice with respect toy and imposing the boundaryconditionsum,α(x,±1) = 0, we find
um,αk(x, y) = −Wo2
2
dpm,α(k+1)
dx
(1 − y2
)for all k with Aτ ≪ ωk+1. (4.1.7)
α = 2:Now bothAα andA2 are the leading terms. Furthermore, asα > 1 the calculation of the first order
25

perturbation variablesT1, Ts1, u1 andp1 in the previous chapter remains unaffected. Collecting the
A2 terms and expanding inω, we find
A2ω2Re
[
i(
ρ0βT10 +γ
c2p10
)
u∗11 + ρ0u
∗11
∂u11
∂x+ ρ0v
∗11
∂u11
∂y
]
= −A2 dpm,20
dx
+ A2ω
{1
Wo2
∂2um,20
∂y2− dpm,21
dx
}
+ A2ω2
{1
Wo2
∂2um,21
∂y2− dpm,22
dx
}
. (4.1.8)
Here we usedu10 = v10 = 0 as calculated in (3.1.19) and (3.1.27). Now successively we findpm,20
is constant,
um,20(x, y) = −Wo2
2
dpm,21
dx
(1 − y2
), (4.1.9)
andum,21 satisfies
1
Wo2
∂2um,21
∂y2=
dpm,22
dx−Re
[
i(
ρ0βT10 +γ
c2p10
)
u∗11 + ρ0u
∗11
∂u11
∂x+ ρ0v
∗11
∂u11
∂y
]
. (4.1.10)
4.1.2 The steady temperatureTsm,α in the plate
The time-averaged part of the diffusion equation forTs reads
1
2A2ωRe
[iρs10
T ∗s10
]+
ω
2N2s
(∂2Tsm,0
∂y′2+ Aα ∂2Tsm,α
∂y′2
)
= 0. (4.1.11)
Here we only included terms up to orderAα andA2. As a resultTsm,0is a function ofx only and can
be determined as
Tsm,0(x) = Tm,0(x, 1), (4.1.12)
As a result we have three boundary conditions left forTm,0 :
Tm,0(x,−1) = Tm,0(x, 1), (4.1.13a)
∂Tm,0
∂y(x,±1) = 0. (4.1.13b)
α < 2:For allk with Aτ ≪ ωk, we findTsm,αk
is a function ofx only and can be determined as
Tsm,αk(x) = Tm,αk(x, 1), (4.1.14)
As a result we again have three boundary conditions left forTm,αk:
Tm,αk(x,−1) = Tm,αk(x, 1), (4.1.15a)
∂Tm,αk
∂y(x,±1) = 0. (4.1.15b)
Note that in general it will not not be possible forTm,kα to satisfy three boundary conditions.
α = 2:Collecting theA2 terms and expanding inω, we find
1
2Re[iρs10
T ∗s10
]+
1
2N2s
∂2Tsm,20
∂y′2= 0. (4.1.16)
26

4.1.3 The steady temperatureTm,α
Substituting the expansions (4.0.47) in the time-averaged temperature equation, we obtain
1
2A2ωRe [iρ1T
∗1 − iβp1T
∗1 ] +
1
2A2Re
[
ρ0u∗1
∂T1
∂x+ ρ0v
∗1
∂T1
∂y− βT0u
∗1
dp1
dx
]
+
Aαρm,0
(
um,α∂Tm,0
∂x+ vm,α
∂Tm,0
∂y
)
=ω
2N2L
(∂2Tm,0
∂y2+ Aα ∂2Tm,α
∂y2
)
+1
2
A2ω
Wo2
∣∣∣∣
∂u1
∂y
∣∣∣∣
2
. (4.1.17)
Again we only included terms up to orderA2 andAα. To leading order we find∂2Tm,0/∂y2 = 0 andthusTm,0 is a function ofx only. The boundary conditions in (4.1.12) and (4.1.13) are satisfied if
Tm,0(x) = Tsm,0(x). (4.1.18)
α < 2:Aα is the leading term. CollectingAα-terms and expanding inω we find
−Wo2
2
(1 − y2
)ρm,0
dTm,0
dx
(dpm,α1
dx+ ω
dpm,α2
dx
)
=ω
2N2L
∂2Tm,α0
∂y2, (4.1.19)
where we substituted the expression found forum,α0 andum,α1. To leading order we finddpm,α1/dx =0 and therefore alsoum,α0 = 0. Next (4.1.19) reduces into
−Wo2
2
(1 − y2
)ρm,0
dTm,0
dx
dpm,α2
dx=
1
2N2L
∂2Tm,α0
∂y2, (4.1.20)
If we try to solve this equation, then the boundary conditions in (4.1.15) can only be satisfied ifdpm,α2/dx = 0 and therefore alsoum,α1 = 0. Continuing this way we can show thatum,αk = 0 forall k with Aα ≪ ωk+1 andA2−α ≪ ωk+1. Consequently we find that eitherAαum,α = O
(A2α
), or
Aαum,A = O(A2), both contradicting our initial assumptions and thereforeα must be 2. Thus the
physics causes the steady mean flow term to be essentially second order, which was also suggested bySwift [23].
α = 2:Collecting theA2 terms and expanding inω, we find
1
2ωRe
[
i(
ρ0βT10 +γ
c2p10
)
T ∗10 − iβp10T
∗10 + ρ0u
∗11
∂T10
∂x+ ρ0v
∗11
∂T10
∂y− βT0u
∗11
dp10
dx
]
=ω
2N2L
∂2Tm,20
∂y2− ρm,0
dTm,0
dx(um,20 + ωum,21) . (4.1.21)
Remember that the variablesp1, T1, Ts1 andu1 are given by the expressions in the previous chapter,asα > 1. To leading order, we findum,20 = 0. NextTm,20 satisfies
1
2Re
[
i{
ρ0βT10 +( γ
c2− β
)
p10
}
T ∗10 + ρ0u
∗11
∂T10
∂x+ ρ0v
∗11
∂T10
∂y
]
=1
2N2L
∂2Tm,20
∂y2
− ρm,0dTm,0
dxum,21. (4.1.22)
27

Solving (4.1.16) and (4.1.22) subject to the boundary conditions
Tm,20(x,±1) = Tsm,20(x,±1), (4.1.23a)
∂Tm,20
∂y(x,±1) = ϑ
∂Tsm,20
∂y(x,∓1). (4.1.23b)
we will find Tm,20 andTsm,20
4.1.4 The continuity equation
Integrating the continuity equation with respect toy from 0 to 1 and time-averaging yields
dM21
dx= 0, (4.1.24)
where
M21 =1
2Re
[∫ 1
0ρ10u
∗11 dy
]
+ ρ0
∫ 1
0um,21 dy. (4.1.25)
4.1.5 The unsteady termsp1, u1 and T1
As α > 1 the calculation of the perturbation variablesT1, u1, p1 in the previous chapter remainsunaffected. Thus forp1 we have
p10 = constant, (4.1.26a)
p11 = constant, (4.1.26b)
1
c2
[
1 +γ − 1
1 + εsfk
]
p10 +fk − fν
(Pr − 1)(1 + εs)β
dTm,0
dx
dp12
dx+ ρm,0
d
dx
(1 − fν
ρm,0
dp12
dx
)
= 0
(4.1.26c)
Foru1 we have
u10(x, y) = 0, (4.1.27a)
u11(x, y) =i
ρm,0
dp12
dx
[
1 − cosh(ανy)
cosh(αν)
]
. (4.1.27b)
Finally, for T1 andTs1 we have
T10(x, y) =βTm,0
ρm,0p10 −
1
ρm,0
dTm,0
dx
dp12
dx
[
1 − Pr
Pr − 1
cosh(ανy)
cosh(αν)
]
−(
βTm,0
ρm,0p10 +
1
ρm,0
1 + εsfν
fk
Pr − 1
dTm,0
dx
dp12
dx
)
cosh(αky)
(1 + εs) cosh(αk), (4.1.28)
Ts10(x, y′) =
εs
1 + εs
(
βT0
ρ0p10 +
1
ρ0
dT0
dx
dp12
dx
1 − fν
fk
Pr − 1
)
cosh(αsy′)
cosh(αs). (4.1.29)
28

4.1.6 Time-averaged energy fluxE
In the same way as we did in equation (3.1.58) in the absence of a mean flow, wecan derive anequation for the time-averaged energy fluxE. In the case of a mean flow, we get an additional termin equation (3.1.52) involvingum,2, that is
ρuh = Aρ0h0u′1 + A2ρ0h0u′
2 + A2h0ρ′1u′1 + A2ρ0h′
1u′1 + A2ρ0h0um,2 + · · ·
= A2ρ0h′1u
′1 + A2ρ0h0um,2 + · · · . (4.1.30)
With this change, we also get an additional steady flow termEm,210 in equation (3.1.58)
E = A2ωEm,210 + A2ωE210 +(ε2 + ϑε2
1
)ωE012 + · · · , (4.1.31)
where
Em,210 = ρ0h0
∫ 1
0um,21 dy. (4.1.32)
4.2 Short Regenerator
We will assume the same ordering for the dimensionless parameters as in (3.2.35) for the case withouta mean flow
ε21
ω≪ ε2
ω≪ A ≪ ω2 ≪ 1, ϑ = O(1), ω = Wo2 =
2N2L
Pr=
2N2s
Pr. (4.2.1)
and again expand the fluid perturbation variablesq1 andqm,α as
q1(x, y) = q10(x, y) + ωq11(x, y) + ω2q12(x, y) + · · · , (4.2.2a)
qm,α(x, y) = qm,α0(x, y) + ωqm,α1(x, y) + ω2qm,α2(x, y) + · · · . (4.2.2b)
In the same way as we did for the stack, it can be shown thatα = 2. We will not repeat this analysisand only mention the final outcome.
4.2.1 The steady flow terms
Forum,2 we find
um,20(x, y) = −1
2
dpm,20
dx
(1 − y2
), (4.2.3)
um,21(x, y) = −1
2
dpm,21
dx
(1 − y2
). (4.2.4)
andum,21 satisfies
∂2um,22
∂y2=
dpm,22
dx− Re
[
i(
ρ0βT10 +γ
c2p10
)
u∗11 + ρ0u
∗11
∂u11
∂x+ ρ0v
∗11
∂u11
∂y
]
. (4.2.5)
subject toum,21(x,±1) = 0. For the steady temperature terms we find
Tm,20(x) = Tsm,20(x) (4.2.6)
29

andTm,21 andTsm,21satisfy
Pr
2Re[iρs10
T ∗s10
]+
∂2Tsm,21
∂y′2, = 0. (4.2.7)
1
2Re
[
i{
ρ0βT10 +( γ
c2− β
)
p10
}
T ∗10 + ρ0u
∗11
dT10
dx
]
=1
Pr
∂2Tm,21
∂y2
− ρm,0dTm,0
dxum,21, (4.2.8)
subject to
Tm,21(x,±1) = Tsm,21(x,±1), (4.2.9a)
∂Tm,21
∂y(x,±1) = ϑ
∂Tsm,21
∂y(x,∓1). (4.2.9b)
For the pressure we find thatpm,20 is constant andpm,21 can be found from
dM21
dx= 0, (4.2.10)
where
M21 =1
2Re
[∫ 1
0
(
ρ0βT10 +γ
c2p10
)
u∗11 dy
]
+ ρ0
∫ 1
0um,21 dy. (4.2.11)
4.2.2 The unsteady flow terms
As α > 1 the calculation of the perturbation variablesT1, u1, p1 in the previous chapter remainsunaffected. Thus forp1 we have
p10 = constant, (4.2.12a)
p11 = 3iβ2p10
∫ x
0
∫ ζ
0
T0(ξ)
ρ0(ζ)
(γ
γ − 1− ρ0(ξ)
ρ0(ξ) + ϑρs0(ξ)
)
dξ dζ + A1x + A2. (4.2.12b)
Foru1 we have
u10(x, y) = 0, (4.2.13a)
u11(x, y) =i
24
dp10
dxρ0(1 − y2)(5 − y2) − 1
2
dp11
dx(1 − y2). (4.2.13b)
Finally, for T1 andTs1we have
T10(x) = Ts10(x) =βT0p10
ρ0 + ϑρs0
, (4.2.14a)
T11(x, y) = iPr
2
ϑρs0βT0p10
ρ0 + ϑρs0
(1 − y2
)+ Tb11 , (4.2.14b)
Ts11(x, y′) = −i
Pr
2
βT0p10
ρ0 + ϑρs0
(1 − y′2
)+ Tb11 . (4.2.14c)
30

4.2.3 Time-averaged energy fluxE
In the same way as we did for the stack we find an additional steady flow termEm,210, so that
E = A2ωEm,210 + A2ωE210 +(ε2 + ϑε2
1
)ωE012 + · · · , (4.2.15)
where
Em,210 = ρ0h0
∫ 1
0um,21 dy. (4.2.16)
Driver Thermallyinsulated tube
W2 E2
Control volume
TH
QH
TC
QC
(a)
Acoustic powerW2
HeatQ2
Total energyE2
QH
QC
(b)
Figure 7: (a) A standing wave refrigerator, insulated everywhere except at the heat exchangers. (b) Illustrationof W2, Q2 andE2 in the refrigerator. The discontinuities inE2 are due to heat transfers at the heatexchangers.
5. Energy fluxes in thermoacoustic devices
The preceding sections show the derivation of expressions for the totalenergy flowE2 and the acousticpowerW2 absorbed in a thermoacoustic refrigerator or heat pump or produced in aprime mover. Asnoted earlier in equation (3.1.58), the total energy is the sum of the acoustic power, the hydrodynamic
31

heat flux and the conduction heat flux. This section will give an idealized illustration of the differentflows and their interaction in a thermoacoustic refrigerator.
Fig. 7(a) shows a standing wave refrigerator thermally insulated from the surroundings except atthe heat exchangers left and right of the stack, where heat can be exchanged with the surroundings.The arrows show the different energy flows into or out of the system except for the conductive heatflow which is neglected for ease of discussion. A loudspeaker (driver) sustains a standing acousticwave in the resonator by supplying acoustic powerW2 in the form of a traveling acoustic wave.Equation (3.1.42) shows that part of this wave will be used to sustain the standing wave against thethermal and viscous dissipations, and the rest of the power will be used bythe thermoacoustic effectto transport heat from the cold heat exchanger to the hot heat exchanger.
Fig. 7(b) illustrates the behavior of the different energy flows as a function of the position in thetube. A part of the acoustic power delivered by the speaker is dissipatedat the resonator wall (first andsecond term in (3.1.42), to the left and right of the stack. The part dissipated at the right of the stackshows up as heat at the cold heat exchanger, decreasing the effective cooling power of the refrigerator.The acoustic power in the stack decreases monotonously, as it is used to transport heat from the coldheat exchanger to the hot heat exchanger, and to overcome viscous forces inside the stack. This powerused shows up as heat at the hot heat exchanger. The power dissipated at the tube wall to the left ofthe stack also shows up as heat at the hot heat exchanger.
Inside the stack, the heat flux grows fromQC at the right end of the stack toQH at the left endof the stack. The two discontinuities in the heat flux arise as a result of the heat exchangers atTC
andTH , supplying heatQC and removing heatQH . The total energy flow is everywhere the sum ofacoustic work and heat fluxes. Within the stack the total energy remains constant.
Conservation of energy holds everywhere. Applying the principle of energy conservation to thecontrol volume shown in Fig. 7(a), in steady state over a cycle, the energyinside the control volumecannot change. Hence the rateE2 at which energy flows out is equal to the rateQC at which energyflows in. Similarly we also find thatW2 is equal toQH − QC .
6. Conclusions
A linear theory of thermoacoustics has been developed based on a dimensional analysis and usingsmall parameter asymptotics. The validity domain of this linear theory can be expressed in the dimen-sionless parameters. For the stack this is
ε21 ≪ ε2 ≪ A ≪ ω2 ≪ 1, (6.0.17a)
Wo = O(1), NL = O(1), Ns = O(1), ϑ = O(1), (6.0.17b)
and for the regenerator we have
ε21
ω≪ ε2
ω≪ A ≪ ω2 ≪ N2
L ≪ 1, (6.0.18a)
Wo ∼ NL, Ns ∼ NL, ϑ = O(1). (6.0.18b)
Using this linear theory all the relevant variables could be determined. Similar results to those ofSwift [21], [23] were obtained. The effect of the dimensionless parameters is most clear in the acous-tic power. Viscous dissipation is reduced by taking the stack short (ω ≪ 1). On the other hand,
32

reducing the pore size (NL ≪ 1) increases the viscous dissipation and reduces the thermal relax-ation dissipation. However, the former can be prevented by taking the stackshort enough, such thatω ≪ NL ≪ 1.
The linearization was first performed assuming no steady mean velocity. Repeating the analysiswith a (small) steady mean velocity showed that the mean velocityum had to be second order in the(dimensionless) amplitudeA. In fact it is always present and arises due to the first-order acoustics,i.e. it is caused by the physics.
Acknowledgements
This project3 is part of a twin PhD program with the Physics Low Temperature Group. Theau-thors would like to thank the Technology Foundation (STW), Shell, the Netherlands Energy ResearchFoundation (ECN) and Aster Thermoacoustics for funding this project.
3Project number: 10002154
33

A Nomenclature
Note that the tildes are used to indicate dimensional variables
A.1 General constants and variablesC typical speed of sound
c speed of sound
cp isobaric specific heat
cv isochoric specific heat
D typical density
˜E total energy
h specific enthalpy
K thermal conductivity
l plate half-thickness
L length of the stack plates
p pressure
˜Q heat flux
s specific entropy
t time
T temperature
U typical fluid speed
u velocity component in direction of sound propagation
v velocity component perpendicular to the direction of sound propagation
˜W acoustic power
x space coordinate along sound propagation
y space coordinate perpendicular to sound propagation
R plate half-separation
β isobaric volumetric expansion coefficient
δ penetration depth
ǫ specific internal energy
κ thermal diffusivity
λ wave length
µ dynamic (shear) viscosity
ν kinematic viscosity
ξ second (bulk) viscosity
ρ density
Σ viscous stress tensor
34

ω angular frequency of the acoustic oscillations
A.2 Dimensionless Numbers
A =U
Camplitude of the acoustic oscillations (Mach number) (A.2.1)
NL =R
δk
Laucret number for the fluid (A.2.2)
Ns =l
δsLaucret number for the solid (A.2.3)
Pr =2N2
L
Wo2Prandtl number (A.2.4)
Wo =√
2R
δνWomersley Number (A.2.5)
ε =R
Laspect ratio of the space between two stack plates (A.2.6)
ε1 =l
Laspect ratio of the stack plate (A.2.7)
γ =cp
cvratio isobaric and isochoric specific heat (A.2.8)
ϑ =RKs
lKratio of the heat fluxes leaving the gas and the plate (A.2.9)
ω =ωL
Crescaled frequency of the acoustic oscillations (Helmholtz number) (A.2.10)
A.3 Thermoacoustic auxiliary functions and variables
fk =tanh(αk)
αk(A.3.1)
fν =tanh(αν)
αν, Rott’s function (A.3.2)
αν = (1 + i)R
δν(A.3.3)
αk = (1 + i)R
δk(A.3.4)
αs = (1 + i)l
δs(A.3.5)
35

εs =
√Kρ0cp tanh(αk)√
Ksρs0cs tanh(αs)stack heat capacity ratio (A.3.6)
A.4 Thermodynamic constants and relations
These relations were taken from [3].
c2 =
(∂p
∂ρ
)
s
, (A.4.1)
cp = T
(∂s
∂T
)
p
=
(
∂h
∂T
)
p
, (A.4.2)
cv = T
(∂s
∂T
)
ρ
=
(∂ǫ
∂T
)
ρ
, (A.4.3)
β = −1
ρ
(∂ρ
∂T
)
p
, (A.4.4)
γ =cp
cv, (A.4.5)
c2β2T = cp(γ − 1), (A.4.6)
p = ρh − ρǫ, (A.4.7)
ds =cp
TdT − β
ρdp, ⇒ s1 =
cp
T0
T1 −β
ρ0p1, (A.4.8)
dρ =γ
c2dp − ρβ dT , ⇒ ρ1 =
γ
c2p1 − ρ0βT1, (A.4.9)
dh = Tds +1
ρdp, ⇒ h1 = T0s1 +
p1
ρ0, (A.4.10)
dǫ = Tds +p
ρ2dρ, ⇒ ǫ1 = T0s1 −
p0
ρ20
ρ1, (A.4.11)
For an ideal gas some of these equations simplify. An ideal gas is a gas for which p/(ρT ) = constant.The value of this constant is denoted byR.
p = ρRT , (A.4.12)
R = cp − cv, (A.4.13)
βT = 1, (A.4.14)
36

c2 = γRT , (A.4.15)
Some ideal gases have the special property that their specific heatscp andcv are constant. These gasesare called perfect gases4
A.5 Fundamental equations
These equations were taken from [6].
∂ρ
∂t+ ∇ · (ρv) = 0, (A.5.1)
ρ
[∂v
∂t+ (v · ∇)v
]
= −∇p + µ∇2v +(
ξ +µ
3
)
∇(∇ · v), (A.5.2)
ρT
(∂s
∂t+ v · ∇s
)
= ∇ · (K∇T ) + Σ:∇v, (A.5.3)
ρs∂Ts
∂t= κs∇
2Ts, (A.5.4)
Using the thermodynamic relations in (A.4.8) - (A.4.11) we can also add the following equations
ρcp
(
∂T
∂t+ v · ∇T
)
− βT
(∂p
∂t+ v · ∇p
)
= K∇ · (∇T ) + Σ:∇v, (A.5.5)
∂
∂t
(1
2ρv2 + ρǫ
)
= −∇ ·[
v
(1
2ρv2 + ρh
)
− K∇T − v · Σ
]
, (A.5.6)
A.6 Sub- and superscripts
∼ dimensional
C cold
H hot
k thermalm mean
p isobaric
r real-valued
s solid, sink, source
v isochoric
δ boundary layer
ν viscous
4Sometimes in literature different definitions are used for ideal and perfect gases. Chapman [3] for example makes nodistinction between ideal and perfect gases.
37

References
[1] E. Buckingham,On physically similar systems: Illustrations of the use of dimensional equations,Physical Review (1914), 345–376.
[2] P.H. Ceperley,A pistonless stirling engine - the traveling wave heat engine, Journal of AcousticalSociety of America66 (1979), 1508.
[3] C.J. Chapman,High speed flow, University Press, Cambridge, 2000.
[4] S.L. Garrett,Thermoacoustic engines and refrigerators, American Journal of Physics72 (2004),11–17.
[5] S.L. Garrett and S. Backhauss,The power of sound, American Scientist88 (2000), 516–525.
[6] L.D. Landau and E. M. Lifshitz,Fluid mechanics, Pergamon Press, Oxford, 1959.
[7] J. Liang,Thermodynamic cycles in oscillating flow regenerators, Journal of Applied Physics82(1997), 4159–4165.
[8] J.A. Lycklamaa Nijeholt, M.E.H. Tijani, and S. Spoelstra,Simulation of a traveling-wave ther-moacoustic engine using computational fluid dynamics, Journal of Acoustical Society of Amer-ica118(2005), 2265–2270.
[9] P. Merkli and H. Thomann,Thermoacoustic effects in a resonant tube, Journal of Fluid Mechan-ics 70 (1975), 161.
[10] W. Pat Arnott, H.E. Bass, and R. Raspet,General formulation of thermoacoustics for stackshaving arbitrarily shaped pore cross sections, Journal of Acoustical Society of America90(1991), 3228–3237.
[11] G. Petculescu,Fundamental measurements in standing-wave and traveling-wave thermoacous-tics, Ph.D. Thesis, Ohio University, 2002.
[12] R. Raspet, H.E. Bass, and J. Kordomenos,Thermoacoustics of traveling waves: Theoreticalanalysis for an inviscid ideal gas, Journal of Acoustical Society of America94 (1993), 2232–2239.
[13] R. Raspet, J. Brewster, and H.E. Bass,A new approximation method for thermoacoustic calcu-lations, Journal of Acoustical Society of America103(1998), 2395–2400.
[14] Lord Rayleigh,Theory of sound, vol. ii, Dover, New York, 1945.
[15] N. Rott,Damped and thermally driven acoustic oscillations in wide and narrow tubes, Journalof Applied Mathematics and Physics20 (1969), 230–243.
[16] , Thermally driven acoustic oscillations. part II: Stability limit for helium, Journal ofApplied Mathematics and Physics24 (1973), 54–72.
[17] , The influence of heat conduction on acoustic streaming, Journal of Applied Mathemat-ics and Physics25 (1974), 417–421.
38

[18] , Thermally driven acoustic oscillations. part III: Second-order heat flux, Journal ofApplied Mathematics and Physics26 (1975), 43–49.
[19] , Thermoacoustics, Advances in Applied Mechanics20 (1980), 135–175.
[20] N. Rott and G. Zouzoulas,Thermally driven acoustic oscillations. part IV: Tubes with variablecross-section, Journal of Applied Mathematics and Physics27 (1976), 197–224.
[21] G.W. Swift, Thermoacoustic engines, Journal of Acoustical Society of America84 (1988),1146–1180.
[22] , Thermoacoustic engines and refrigerators, Physics Today (1995), 22–28.
[23] , A unifying perspective for some engines and refrigerators, Acoustical Society of Amer-ica, Melville, 2002.
[24] M.E.H. Tijani, Loudspeaker-driven thermoacoustic refrigeration, Universiteitsdrukkerij Eind-hoven, Eindhoven, 2001.
[25] J.C. Wheatley, G.W. Swift, and A. Migliori,The natural heat engine, Los Alamos Science(1986), 2–33.
39