System Types in Feedback Control with Saturating Actuators.pdf

of 18
-
Upload
oualid-lamraoui -
Category
Documents
-
view
220 -
download
0
Transcript of System Types in Feedback Control with Saturating Actuators.pdf
-
7/23/2019 System Types in Feedback Control with Saturating Actuators.pdf
1/18
System Types in Feedback Control with
Saturating Actuators
Yongsoon Eun, Pierre T. Kabamba, and Semyon M. Meerkov
Department of Electrical Engineering and Computer Science,University of Michigan, Ann Arbor, MI 48109-2140, USA
May 16, 2003
Abstract
This Technical Note extends the classical notion of system type to feedbackcontrol with saturating actuators. For step, ramp, and parabolic inputs, it defines
the so-called trackable domains and evaluates steady state errors. It shows that,unlike the linear case, the role of the poles at the origin of the plant and thecontroller are different and, on this basis, extends the notion of system type.Results obtained are useful for selecting controllers and actuators to ensure desiredtrackable domains and steady state errors.
This work has been supported by NSF Grant No. CMS-0073302Please address correspondence to Professor P. T. Kabamba, Department of Aerospace Engineering, Univer-
sity of Michigan, Ann Arbor, MI 48109-2140, USA, e-mail: [email protected], phone: (734) 763-6728,fax: (734) 763-0578.
-
7/23/2019 System Types in Feedback Control with Saturating Actuators.pdf
2/18
1. INTRODUCTION
The notion of system type is important in linear control systems analysis and design. This
notion, however, is not applicable to systems with saturating actuators. Indeed, the two
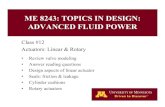
systems shown in Figure 1.1 have identical type if the saturation is ignored, but in the presence
of saturation have qualitatively different tracking capabilities. Namely, the system of Figure
1.1(a) can track ramps with a finite steady state error, but that of Figure 1.1(b) cannot track
any ramp. This indicates that the usual definition of system type has to be modified to be
applicable to systems with saturating actuators. This modification is the purpose of this
Technical Note.
Specifically, we show that the roles of poles at the origin of the plant and the controller are
different, and system type is defined by the plant poles. The controller poles, however, also
play a role but it is limited to affecting the steady state error, while not enlarging the class of
trackable references. This class is characterized through the new notion of Trackable Domain,
which quantifies the size of steps or the slope of ramps, that can be tracked when saturation
is present. The new system types and the Trackable Domains are the main contributions of
this work.
Systems with saturating actuators have been studied in numerous publications (see [1] for
an annotated bibliography and the recent monographs [2][4]). However, no results on system
types and Trackable Domains have been reported.
The outline of this note is as follows: Section 2 investigates the existence of steady states
and evaluates the steady state tracking errors. Based on this investigation, in Section 3,
the definition of system type is introduced and the steady state errors are characterized. In
Section 4, a design example is given. Conclusions are given in Section 5. The proofs are
included in the Appendix.
-
+r
(b)(a)
-
+r1
1
s
1
s(s+ 1)
1
s+ 1
y y
plantcontroller actuatorsaturating
controller plantactuatorsaturating
Figure 1.1: Motivating example
1
-
7/23/2019 System Types in Feedback Control with Saturating Actuators.pdf
3/18
2. EXISTENCE OF STEADY STATES, TRACKABLE DOMAINS,
AND STEADY STATE ERRORS
2.1 Assumption
Consider the SISO systems shown in Figure 2.1 where P(s) and C(s) are the plant and
controller, respectively, and sat(v) is the saturating actuator defined by
sat(v) =
if < v,
v if v ,
ifv 0, Q 0, (2.3)
wherex = [xTp xTc]
T.
In some cases, this assumption can be verified using the methods of absolute stability
theory [5]. In others, the method of [6] can be used. Although (2.3) seems somewhat exacting,
-+ v y
P(s)er
C(s) sat(v)
Figure 2.1: Feedback control system with saturating actuator
2
-
7/23/2019 System Types in Feedback Control with Saturating Actuators.pdf
4/18
we need it to ensure the stability of (2.2) with not only the symmetric saturation (2.1) but
also with every asymmetric saturation defined by sat, (v) = sat(v+) , with ||< .
Systems with asymmetric nonlinearities arise in the analysis of (2.2) when r(t)= 0.
2.2 Step Input
Consider the closed loop system (2.1), (2.2) and assume that r(t) =r0u(t), where u(t) is the
unit step function. For s R, define
C0= lims0+
C(s), (2.4)
P0 = lims0+
P(s), (2.5)
where the limits (2.4) and (2.5) are allowed to be infinite. Introduce the steady state error
with respect to stepestepss = lim
t[r0u(t) y(t)]. (2.6)
Theorem 2.1. Under Assumption 2.1,
(i) estepss exists if
|r0|0,
(c) M0,
(d) (A+BC, M) is observable.
11
-
7/23/2019 System Types in Feedback Control with Saturating Actuators.pdf
13/18
Proof: Using (A.1), rewrite (2.2) with r = 0 as
x= Ax+B sat(v),
v= C x.(A.3)
Under Assumption 2.1, global asymptotic stability of closed loop system (2.1), (2.2), or equiv-
alently the closed loop system (2.1), (A.3), can be established using the Lyapunov function
V(x) =xTQx+
v0
sat()d. (A.4)
If|Cx| , this V(x) reduces to
V(x) =xT(Q+1
2CTC)x, (A.5)
the derivative ofV(x) along the trajectory of (2.1), (A.3) becomes
V(x) =x
T
Mx, (A.6)
and (A.3) can be written as
x= (A+BC)x. (A.7)
Since the closed loop system (2.1), (A.3) is globally asymptotically stable, A+BC in (A.7)
is Hurwitz, which proves (a). SinceV(x)> 0 and V(x) 0, matrices Q + 12CTCand M (see
(A.5) and (A.6)) are positive definite, and negative semidefinite, respectively. This proves (b)
and (c). Finally, (a), (b), (c) imply that the pair (A + BC, M) is observable [9], which proves
(d).
Lemma A.2. Let Assumption 2.1 hold. Then, for every asymmetric saturation, sat, (v) =
sat(v+) , with ||< , the closed loop system (2.2) with r = 0, i.e.,
xp= Apxp+Bp sat, (v),
xc = Acxc+Bc(y),
y= Cpxp,
v= Ccxc+Dc(y),
(A.8)
is globally asymptotically stable.
Proof: Under Assumption 2.1, global asymptotic stability of closed loop system (2.1), (2.2)
can be established using the Lyapunov function
V(x) =xTQx+
v0
sat()d, (A.9)
12
-
7/23/2019 System Types in Feedback Control with Saturating Actuators.pdf
14/18
wherex= [xTp xTc]
T. It will be shown that, based on this V(x), a Lyapunov function can be
found that establishes global asymptotic stability of (A.8).
Without loss of generality, assume 0 < < . Introducing the state transformation
=
+xand the notation =
+v, rewrite (A.8) as
= A+B (),
= C .(A.10)
Here A, B , and Care defined in (A.1) and () =
+sat,
+
, i.e.,
() =
, if < ,
, if < < ,
, if 0. This must satisfy(C)= sat(C), i.e.,C > , otherwise, it would result
in V(x)>0 at x= . Define x =
. Then, Cx > , (C) = and sat(Cx
) = .
Substitutingx in (A.14) yields
V(x
) =xT
(AT
Q+QA)x
+ sat(Cx
)(2BT
Q+CA)x
+CB[sat(Cx
)]2
= (/)2T(ATQ+QA) +(2BTQ+CA)/+CB2
= (/)2[T(ATQ+QA) +(2BTQ+CA) +CB2]
= (/)2[T(ATQ+QA) +(C)(2BTQ+CA) +CB[(C)]2]
= (/)2V1()> 0,
(A.15)
13
-
7/23/2019 System Types in Feedback Control with Saturating Actuators.pdf
15/18
which contradicts Assumption 2.1. Therefore, V1() 0 for all = 0.
Next we show, again by contradiction, that the only solution of (A.10), (A.11) that is
contained in { |V1() = 0} is the trivial solution (t) 0.
Let (t), t 0, be a non-trivial solution of (A.10), (A.11) that satisfies V1((t)) 0.
Assume firstC(t) for all t 0. Since sat
(C(t)) =(C(t)), system (2.1), (2.2) and
system (A.10), (A.11) are identical; therefore, x(t) = (t) is a non-trivial solution of (2.1),
(2.2) as well. Moreover, as it follows from (A.13) and (A.14), V(x(t)) = V1((t)) 0. This
contradicts Assumption 2.1. Hence, (t) cannot satisfy C(t) for all t 0.
Assume now that C(t) for all t 0. Then, from (A.10), (A.11),
(t) =eAt(0) +
t0
eABd. (A.16)
Define x(t) = (t). Then, x(t) is a solution of (2.1), (2.2), since Cx(t)> and
x(t) =
(t) =eAtx(0) +
t0
eABd. (A.17)
Moreover, using the chain of equalities similar to (A.15), we obtain V(x(t)) = (/)2 V1((t))
0. This again contradicts Assumption 2.1. Hence, (t) cannot satisfy C(t) for all t 0
either. Therefore, there must exist an interval (t1, t2), t1 = t2, such that |C(t)|< for all
t (t1, t2). In this interval,
(t) =e(A+BC)(tt1)(t1), t (t1, t2), (A.18)
and
V1((t)) =T(t)M(t) = 0, t (t1, t2), (A.19)
whereM is defined in (A.2). Since Mis negative semidefinite by Lemma A.1, it follows that
M(t) =M e(A+BC)(tt1)(t1) = 0, t (t1, t2). (A.20)
This, however, contradicts the observability of (A +BC,M), which must take place according
to Lemma A.1. Thus, (t) 0 is the only solution of (A.10), (A.11) that is contained in
{ |V1() = 0}.
Finally, it can be shown, again by contradiction, that V1() > 0 for all = 0 and that
V1() as|| . Therefore, the system (A.10) and (A.11), and, hence, (A.8) is globally
asymptotically stable.
14
-
7/23/2019 System Types in Feedback Control with Saturating Actuators.pdf
16/18
Proof of Theorem 2.1: Three cases are possible: (a)|C0| = and |P0| =; (b)|C0|=
and|P0| =; (c)|P0|= .
(a) Assume |C0| = and |P0| =. Define xp, xc , y
, and v as
v = C0
1 +C0P0r0, y
= C0P01 +C0P0
r0, x
p = A1
p Bp v, xc =A
1c Bc(r0 y
). (A.21)
Using
xp= xp x
p, xc = xc xc , y= y y
, v= v v, (A.22)
rewrite (2.2) as
xp= Apxp+Bp sat, v(v),
xc = Acxc+Bc(y),
y= Cpxp,
v= Ccxc+Dc(y).
(A.23)
Note that condition (2.7) implies|v|< . Therefore, Assumption 2.1 and Lemma A.2 ensure
the global asymptotic stablility of (A.23). Hence, the steady state exists and y(t) converges
toy, i.e., estepss exists. This proves (i). Moreover, by definition, estepss is given by
estepss =r0 y =r0
C0P01 +C0P0
r0= r0
1 +C0P0, (A.24)
which proves (ii).
(b) |C0|= implies that Ac has an eigenvalue 0. Choose xc = 0 to satisfy
Acxc = 0, Ccx
c =
r0P0
, (A.25)
and let
v = r0P0
, y =r0, x
p= A1
p Bpv. (A.26)
Proceeding similarly to (a), it can be shown that if|r0|< |P0|, then estepss = 0.
(c) |P0|= implies Ap has an eigenvalue 0. Choose x
p= 0 to satisfy
Apx
p= 0, Cpx
p= r0, (A.27)
and let v = 0, y = r0, xc = 0. Similarly to (a), it can be shown that e
stepss = 0. This
completes the proof.
15
-
7/23/2019 System Types in Feedback Control with Saturating Actuators.pdf
17/18
-+ v(t) y(t)sP(s)e(t)
(b)
1s C(s) sat(v)
r1
us
(t)
-+ v(t) y(t)e(t)
(a)
P(s)1
s C(s) sat(v)
r1us(t)
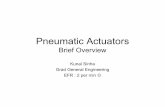
Figure 5.4: Block diagram of a system with ramp input
Proof of Theorem 2.2: Consider the system with ramp input shown in Figure 5.4(a).
Equivalently, it can be represented as shown in Figure 5.4(b) where the input and output are
step and y rather than ramp and y as in Figure 5.4(a). We refer to these systems as system(a) and (b), respectively. Since the input to system (b) is step, erampss of system (a) can be
analyzed using Theorem 2.1 applied to system (b). Indeed, Assumption 2.1 holds for system
(b) since it is assumed to hold for system (a). Also, introducing
P(s) =sP(s), C(s) =1s
C(s), (A.28)
and noting that
P0= P1,
C0= , (A.29)
condition (2.17) for system (a) is equivalent to |r1| < 1C0 +P0
for system (b). Thus,Theorem 2.1 ensures the existence of steady state in system (b) and
limt
e(t) = r1
1 +P0C0 = 0. (A.30)This implies that limt e(t) = const., which proves (i).
It follows from the proof of Theorem 2.1 that | limt v(t)| < . Therefore,erampss must
be identical to that of the system with linear actuator, i.e.,
erampss = r1
limt sP(s)C(s). (A.31)
SinceP1= limt sP(s)= 0, it follows that
limt
sP(s)C(s) = limt
sP(s) limt
C(s) =P1C0, (A.32)
16
-
7/23/2019 System Types in Feedback Control with Saturating Actuators.pdf
18/18
and
erampss = r1P1C0
. (A.33)
This proves (ii).
The proof for the parabolic input case is similar.
REFERENCES
[1] D. S. Bernstein, and A. N. Michel, Chronological bibliography on saturating actuators,
Int. J. Robust and Nonlinear Contr., vol. 5, no. 5, pp. 375-380, 1995.
[2] A. Saberi, A. A. Stoorvogel, and P. Sannuti, Control of Linear Systems with Regulation
and Input Constraints, London: Springer, 2000.
[3] T. Hu, Z. Lin, Control Systems with Actuator Saturation : Analysis and Design, Boston:
Birkhaser, 2001.
[4] V. Kapila (editor),Actuator Saturation Control, New York: Marcel Dekker, 2002.
[5] K. S. Narendra and J. H. Taylor,Frequency Domain Criteria for Absolute Stability, New
York: Academic Press, 1973.
[6] F. Tyan and D. S. Bernstein, Global stabilization of systems containing a double inte-
grator using a saturated linear controller, Int. J. Robust and Nonlinear Contr., vol. 9,
pp. 11431156, 1999.
[7] H. J. Sussmann and Y. Yang, On the stabilizability of multiple integrators by means of
bounded feedback controls, Proc. Conf. Dec. Contr., pp. 7072, Brighton, U.K., 1991.
[8] J. Goncalves, Quadratic surface Lyapunov functions in global stability analysis of sat-
uration systems, Proc. Amer. Contr. Conf., Arlington, VA, June 2001.
[9] K. Zhou, J. C. Doyle, and K. Glover, Robust and Optimal Control, New Jersey: Prentice
Hall, 1996.
17