System-Lastenheft Automotive System Cluster (ELC und ACC) · Dieses Dokument wurde aus einer...
24
© SPES Company Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion / Any alterations are subject to the approval of the design department Bearbeiter.: Abteilung: Datum: Stand: Auftr.-Nr.: Seite/page: Druckdatum: 2017-04-11 004 2013-08-01 Dr. Frank Houdek SPES R&D 1 von 24 System-Lastenheft SyS-LH C34-223 Automotive System Cluster System-Lastenheft Automotive System Cluster (ELC und ACC)
Transcript of System-Lastenheft Automotive System Cluster (ELC und ACC) · Dieses Dokument wurde aus einer...

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
1 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
System-Lastenheft
Automotive System Cluster
(ELC und ACC)

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
2 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
Freigabe
Fachbereich/Funktion Name Datum Unterschrift
Ersteller System-Lastenheft
SPES Company
Dr. Frank Houdek 01.07.2013
Leiter Fachbereich
SPES Company
Marion Schautgenaudrauf 15.07.2013
Projektleitung Entwicklung
SPES Company
Dr. Linda Muster 01.08.2013
Version der verwendeten Lastenheft-Vorlage:
V 2.1
HINWEIS:
Dieses Dokument wurde aus einer Datenbank (IBM Rational DOORS) generiert und wird in dieser Datenbank gepflegt.
Um den Inhalt eindeutig zu identifizieren, werden von der Datenbank Identifier (IDs) vergeben.
Folgende Formen des Identifiers können je nach Formatierung im Dokument auftreten:
- ID links, Text rechts (Anforderung)
- ID unter dem Text (Anforderung)
- ID in Klammern hinter einer Überschrift

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
3 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
Änderungsdokumentation
LH-
Versi
on
Nachtragsbeschreibung Bearbeitet (Datum) Genehmigt (Datum)
V02 Ergänzung Zweistufiger Tempomathebel, Bremsassistent A. Maisch 20.05.13 L. Muster 31.05.13
V03 Ergänzung Tempomat mit Bremseingriff, Schildererkennung,
Abstandswarner
B. Noch 16.06.13 L. Muster 20.06.13
V04 Ergänzung Abstandsregeltempomat, Notbremsassistent, Stau-
Folgefahren
F. Houdek 01.07.13 L. Muster 01.08.13
V05
V06
V07
V08
V09
V10
V11
V12
V13
V14
V15

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
4 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
Inhaltsverzeichnis 1 System Adaptives Außenlicht ............................................................................................................ 6
1.1 Allgemeines ..................................................................................................................................... 6
1.1.1 Kurzbeschreibung des Entwicklungsumfangs .................................................................................................... 6
1.2 Funktionen ....................................................................................................................................... 6
1.2.1 Blinken (Richtungsblinken, Warnblinken) ......................................................................................................... 6
1.2.2 Abblendlicht (inkl. Tagfahrlicht und Abbiegelicht) ........................................................................................... 7
1.2.3 Adaptives Fernlicht ............................................................................................................................................ 8
1.2.4 Manuelles Fernlicht ............................................................................................................................................ 8
1.2.5 Fehlererkennung ................................................................................................................................................. 9 1.2.5.1 Defekte Leuchten ............................................................................................................................................................ 9 1.2.5.2 Über- und Unterspannung ............................................................................................................................................... 9
1.3 Eigenschaften und Randbedingungen, Schnittstellen ...................................................................... 9
1.3.1 Beleuchtungs-Elemente ...................................................................................................................................... 9
1.3.2 Bedienelemente und Einstellungen................................................................................................................... 10 1.3.2.1 Lichtdrehschalter .......................................................................................................................................................... 10 1.3.2.2 Einstellung Kombiinstrument ....................................................................................................................................... 11 1.3.2.3 Lenkstockhebel ............................................................................................................................................................. 11 1.3.2.4 Warnblinklicht-Schalter ................................................................................................................................................ 11 1.3.2.5 Dunkeltaster (nur Sonderschutzfahrzeuge) ................................................................................................................... 11
1.3.3 Sensoren und Aktuatoren.................................................................................................................................. 11 1.3.3.1 Kamera.......................................................................................................................................................................... 11
1.3.4 Scheinwerfertechnologie .................................................................................................................................. 12
1.3.5 Funktionssicherheit ........................................................................................................................................... 12
1.4 Prüfung, Erprobung und Absicherung ........................................................................................... 12
2 System Geschwindigkeitsregelung .................................................................................................. 12
2.1 Allgemeines ................................................................................................................................... 12
2.1.1 Kurzbeschreibung des Entwicklungsumfangs .................................................................................................. 12
2.2 Funktionen ..................................................................................................................................... 12
2.2.1 Abstandsregeltempomat ................................................................................................................................... 12
2.2.2 Abstandswarner ................................................................................................................................................ 13
2.2.3 Notbremsassistent ............................................................................................................................................. 13
2.2.4 Tempomat ......................................................................................................................................................... 13
2.2.5 Geschwindigkeitsbegrenzung ........................................................................................................................... 15 2.2.5.1 Schilderkennung ........................................................................................................................................................... 15
2.2.6 Bremsassistent .................................................................................................................................................. 15
2.3 Eigenschaften und Randbedingungen, Schnittstellen .................................................................... 16
2.3.1 Bedienelemente und Einstellungen................................................................................................................... 16 2.3.1.1 Tempomathebel ............................................................................................................................................................ 16 2.3.1.2 Geschwindigkeitsbegrenzungshebel ............................................................................................................................. 16 2.3.1.3 Bremspedal ................................................................................................................................................................... 16 2.3.1.4 Gaspedal ....................................................................................................................................................................... 16
2.3.2 Funktionssicherheit ........................................................................................................................................... 16
2.4 Prüfung, Erprobung und Absicherung ........................................................................................... 16

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
5 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
3 Eigenschaften und Randbedingungen ............................................................................................ 16
4 Schnittstellen ..................................................................................................................................... 17
4.1 Übersicht E/E-Architektur ............................................................................................................. 17
4.2 Parameter ....................................................................................................................................... 18
4.3 Parameter ....................................................................................................................................... 24

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
6 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
1 System Adaptives Außenlicht
1.1 Allgemeines
1.1.1 Kurzbeschreibung des Entwicklungsumfangs
AL-2: Das System Außenlicht umfasst folgende kundenerlebbare Funktionen:
AL-54: Blinken: Ansteuerung der Fahrrichtungsanzeiger des Fahrzeugs in Abhängigkeit des
Lenkstockhebels und/oder des Warnblink-Schalters.
AL-55: Abblendlicht: Ansteuerung des Abblendlichtes in Anbhängigkeit des Lichtdrehschalters und
der Fahrzeugeinstellung Tagfahrlicht.
AL-56: Adaptives Fernlicht: Ansteuerung des Fernlicht-Scheinwerfers in Abhängigkeit des
Fernlicht-Schalters und der Detektion entgegenkommender Fahrzeuge.
1.2 Funktionen
1.2.1 Blinken (Richtungsblinken, Warnblinken)
AL-40: Richtungsblinken Links: Nach Bewegen des Lenkstockhebels in die Position „Links-
Blinken“ blinkt das Fahrzeug an allen linken Fahrtrichtungsanzeigern (Vorne links,
Außenspiegel links, Hinten links) synchron im Taktverhältnis hell zu dunkel 1:1.
AL-144: Die maximale Abweichung vom Taksverhältinis sollte unterhalb der Wahrnehmungsschwelle
eines menschlichen Beobachtersliegen.
AL-147: Eine Abweichung im Takverhältnis von weniger als 0,5 % wird als unterhalb der
Wahrnehmungsschwelle eines menschlichen Beobachters angesehen.
AL-145: Die Reaktionszeit zwischen der Betätigung des Lenkstockhebels und dem Anfang des ersten
Blinkzyklus soll unterhalb der Wahrnehmungsschwelle eines menschlichen Beobachters
liegen.
AL-146: Eine Abweichung von unter 0,05 s wird als unterhalb der Wahrnehmungsschwelle eines
menschlichen Beobachters angenommen.
AL-104: Tipp-Blinken Links: Bewegt der Fahrer den Lenkstockhebel für weniger als 0,5 Sekunden in
die Position "Tipp-Blinken Links", so werden alle linken Fahrtrichtungsanzeiger (vgl. AL-40)
in drei Blinkzyklen angesteuert.
AL-129: Betätigt der Fahrer den Lenkstockhebel in die jeweilig andere Richtung oder betätigt den
Warnblink-Schalter während der drei Blinkzyklen des Tippblinkens, so muss der vorherige
Tipp-Blink Zyklus abgebrochen werden und der neu angeforderte Blink-Zyklus ausgelöst
werden (Richtungsblinken, Tipp-Blinken, Warnblinken je nach neuer Anforderung)
AL-105: Hält der Fahrer den Lenkstockhebel für mindestens 0,5 Sekunden in der Position "Tipp-
Blinken Links", so werden so lange mit allen Fahrtrichtungsanzeigern links (vgl. AL-40)
Blinkzyklen durchlaufen, bis der Lenkstockhebel die Position "Tipp-Blinken Links" verlässt.
AL-101: Richtungsblinken Rechts und Tipp-Blinken Rechts: Analog wie Blinken links
AL-89: Richtungsblinken: für USA und CANADA muss das Tagfahrlicht beim Richtungsblinken
auf der blinkenden Seite um 50% Lichtintensität gedimmt werden.
AL-109: Betätigt der Fahrer während der drei Blinkzyklen im Tipp-Blinken erneut den
Lenkstockhebel, so wird nur der aktuelle Blinkzyklus abgeschlossen und dann die neuen
Blinkaufforderung bearbeitet.
AL-41: Warnblinken: Solange der Warnblink-Schalter gedrückt ist, blinken alle
Fahrtrichtungsanzeiger synchron. Ist der Zündschlüssel im Schloss, ist das Taktverhältnis hell

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
7 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
zu dunkel 1:1. Steckt der Zündschlüssel nicht im Schloss, ist das Taktverhältnis hell zu dunkel
1:2.
AL-148: Die Anpassung der Taktverhältnisse muss spätestens nach zwei vollständigen Zyklen
erfolgen.
AL-51: Hinweis: Die Reduktion des Taktverhältnisses hat den Hintergrund, dass dadurch Strom
gespart werden soll, so dass im Falle einer Notsituation das Warnblinken möglichst lange
aufrecht erhalten werden kann bevor die Autobatterie leer ist.
AL-107: Nach Deaktivieren des Warnblinkens wird mit Richtungsblinken fortgefahren, soweit der
Lenkstockhebel in der Position "Links-Blinken" bzw. "Recht-Blinken" steht.
AL-108: Wurde kurz vor dem Deaktivieren des Warnblinkens Tipp-Blinken aktiviert, wird dies beim
Deaktivieren des Warnblinkes nicht beachtet.
AL-98: Die Dauer für einen Blinkzyklus beträgt 1 Sekunde.
AL-149: Auch nach 1000 Blinkzyklen darf die kummulierte Abweichung nicht als 0,05s betragen.
AL-103: Ein Blinkzyklus (Hell und Dunkel) wird immer vollständig durchlaufen, bevor ein neuer
Blinkzyklus erfolgen kann.
AL-106: Hinweis: Dadurch, dass immer vollständige Blinkzyklen gefordert werden, wird ein
"Springen" des Blinkers vermieden. Ein Wechsel des Lenkstockhebels von Tipp-Blinken nach
Richtungsblinken oder zurück hat so beispielsweise keine sichtbare Auswirkung.
1.2.2 Abblendlicht (inkl. Tagfahrlicht und Abbiegelicht)
AL-42: Das Abblendlicht kann durch mehrere Bedingungen aktiviert werden:
AL-44: (a) Der Fahrer aktiviert das Abblendlicht durch Betätigung des Lichtdrehschalters (Position
Außenlicht ein).
AL-45: (b) Bei aktiviertem Tagfahrlicht wird das Abblendlicht nach dem Starten des Motors
eingeschaltet. Das Tagfahrlicht bleibt so lange aktiv, wie der Zündschlüssel gesteckt ist. Bei
aktivierter Umfeldbeleuchtung bleibt das Abblendlicht entsprechend AL-48 aktiviert.
AL-46: (c) In der Automatikposition des Lichtdrehschalters wird das Abblendlicht automatisch
aktiviert, sobald die Umgebungshelligkeit unter einen bestimmten Schwellwert S1 fällt.
Überschreitet die Umgebungshelligkeit einen Schwellwert S2 (wobei S2>S1), wird das
Abblendlicht deaktiviert. In jedem Fall bleibt das Abblendlicht mindestens 3 Sekunden aktiv.
AL-47: (d) Bei aktivierter Umfeldbeleuchtung wird das Abblendlicht eingeschaltet, sobald
mindestens eine Tür des Fahrzeugs geöffnet wird und die Umgebungshelligkeit des Fahrzeugs
kleiner dem Schwellwert S1 ist. Das Abblendlicht wird deaktiviert, sobald alle Fahrzeugtüren
wieder geschlossen wurden.
AL-48: (e) Bei aktivierter Umfeldbeleuchtung wird das Abblendlicht aktiviert, sobald der Motor
abgeschaltet und der Zündschlüssel abgezogen wird. Das Abblendlicht als
Umfeldbeleuchtung wird deaktiviert, sobald 30 Sekunden lang keine der folgenden Aktionen
erfolgt:
- Öffnen oder Schließen einer Tür
- Stecken oder Abziehen des Zündschlüssels
AL-138: Bei aktivierten Dunkeltaster (nur Sonderschutz-Fahrzeuge) wird die Umfeldbeleuchtung
nicht aktiviert.
AL-43: Abbiegelicht: Wird bei aktiviertem Abblendlicht der Blinkerhebel betätigt und fährt das
Fahrzeug langsamer als 10 km/h, so wird zusätzlich das Abbiegelicht aktiviert. Nach erfolgter
Kurvenfahrt (d.h. der Fahrtrichtungsanzeiger ist nicht mehr aktiv) wird das Abbiegelicht nach
10 Sekunden wieder innerhalb von 1 Sekunde ausgeschaltet (sanftes Abblenden).

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
8 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
AL-139: Bei aktivierten Dunkeltaster (nur Sonderschutz-Fahrzeuge) wird das Abbiegelicht nicht
aktiviert.
1.2.3 Adaptives Fernlicht
AL-15: Steht der Lichtdrehschalter in der Position "Auto", wird das adaptive Fernlicht wird durch
Bewegen des Lenkstockhebels nach hinten aktiviert.
AL-110: Die Betriebsbereitschaft des adaptiven Fernlichts wird durch ein Symbol im Kombi-
Instrument angezeigt.
AL-111: Wird bei aktiven adaptivem Fernlicht bei Geschwindigkeiten von mindestens 30 km/h durch
die Kamera kein Licht eines entgegenkommenden Fahrzeugs erkannt, wird die Straße
innerhalb von 2 Sekunden gemäß der Kennlinie AL-112 ausgeleuchtet (aktiviertes Fernlicht).
AL-16: Erkennt die Kamera die Lichter eines entgegenkommenden Fahrzeugs, wird ein aktiviertes
adaptives Fernlicht innerhalb von 0,5 Sekunden auf Abblendlicht heruntergeregelt, indem
durch Verstellung der Scheinwerferposition als auch durch Reduktion der Leuchtstärke der
Ausleuchtebereich auf 65m reduziert wird.
AL-17: Wird kein entgegenkommendes Fahrzeug mehr erkannt, so wird innerhalb von 2 Sekunden
wieder die Fernlicht-Ausleuchtung hergestellt.
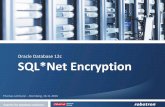
AL-38: Der Ausleuchtebereich beim Fernlicht ist geschwindigkeitsabhängig und schwankt zwischen
100m und 300m (vgl. Kennlinie AL-112).
AL-112: Abbildung: Geschwindigkeitsabhängige Kennlinie des Ausleuchtbereichs
AL-120: Wird der Lenkstockhebel wieder in die horizontale Neutralposition bewegt, wird das adaptive
Fernlicht deaktiviert. Eine etwaige Ausleuchtung der Fahrbahn wird sofort (d.h. ohne
Herunterregeln) auf Abblendlicht reduziert.
1.2.4 Manuelles Fernlicht
AL-118: Durch Heranziehen des Fernlicht-Schalters wird die Lichthupe aktiviert, d.h. so lange der
Fernlicht-Schalter herangezogen wird, ist das Fernlicht aktiv.
0 30 60 90 120 150 180 210 240
0
50
100
150
200
250
300

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
9 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
AL-119: Steht der Lichtdrehschalter in den Positionen "Aus" oder "Außenlicht ein", so bewirkt ein
Bewegen des Lenkstockhebels nach hinten das Aktivieren des Fernlichts mit einem festen
Ausleuchtungsbereich von 220m.
1.2.5 Fehlererkennung
1.2.5.1 Defekte Leuchten
AL-100: Erkennt die Ansteuerung der Leuchten dass ein Leuchtmittel defekt ist, so wird die
Information über das defekte Leuchtmittel an das Kombiinstrument übermittelt.
AL-102: Die Priorisierung der Anzeige im Kombiinstrument wird durch das Kombiinstrument
festgelegt.
1.2.5.2 Über- und Unterspannung
AL-115: Beträgt die Spannung im Bordnetz weniger als 8,5V, so liegt Unterspannung vor.
AL-116: Bei Unterspannung steht das adaptive Fernlicht nicht zur Verfügung. Wird bei
Lichtdrehschalter = Auto der Lenkstockhebel nach hinten bewegt, wird das Fernlicht aktiviert
(vgl. AL-119).
AL-121: Bei Unterspannung steht die Umfeldbeleuchtung nicht zur Verfügung.
AL-122: Bei Unterspannung steht das Abbiegelicht nicht zur Verfügung.
AL-123: Beträgt die Spannung im Bordnetz mehr als 14,5V, so liegt Überspannung vor.
AL-124: Bei Überspannung sind die Leuchten zum Schutz der Leuchtmittel mit
(100 - (Spannung - 14,5) * 20)% mit einer Toleranz von +/-10% der eigentlichen Leistung
mittels PWM anzusteuern.
AL-125: Hinweis: Die Reduktion der Ansteuerungsleistung dient dem Schutz der Leuchtmittel (Schutz
vor "Durchbrennen").
AL-126: Bei Überspannung müssen die Anforderungen bzgl. Ausleuchtebereich (vgl. AL-38 und AL-
16) nicht eingehalten werden.
1.3 Eigenschaften und Randbedingungen, Schnittstellen
1.3.1 Beleuchtungs-Elemente
AL-64: In nachfolgender Abbildung sind die Positionen der Beleuchungselemente des Außenlichts
am Fahrzeug schematisch dargestellt.

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
10 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
AL-62: Abbildung: Position der Beleuchtungselemente
AL-63: Konkret sind an den einzelnen Positionen folgende Beleuchtungs-Elemente verbaut:
AL-65: Position A (links und rechts):
Fahrtrichtungsanzeiger (Blinker)
Scheinwerfer für Abblendlicht kombiniert mit Fernlicht
Leuchte für Abbiegelicht links oder rechts (integriert in Stoßfänger)
AL-67: Position B (links und rechts):
Fahrtrichtungsanzeiger (Blinker)
AL-68: Position C (links und rechts):
Fahrtrichtungsanzeiger (Blinker)
Bremslicht
Schlussleuchte
AL-66: Details zur Ausführung der Beleuchtungs-Elemente sind in der Richtlinie 93/92/EWG des
Rates vom 29. Oktober 1993 über den Anbau der Beleuchtungs- und Lichtsignaleinrichtungen
an zweirädrigen oder dreirädrigen Kraftfahrzeugen geregelt.
1.3.2 Bedienelemente und Einstellungen
AL-69: Im Kontext des Außenlichtsystems sind folgende Bedienelemente und
Einstellungsmöglichkeiten vorhanden:
1.3.2.1 Lichtdrehschalter
AL-71: Abbildung: Lichtdrehschalter
AL-72: Der Lichtdrehschalter hat folgende Positionen: (vgl. Arc-55)
Arechts Brechts Crechts
Alinks Blinks Clinks

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
11 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
AL-73: Aus
Auto (Automatikposition)
Außenlicht ein
1.3.2.2 Einstellung Kombiinstrument
AL-75: Im Kombiinstrument kann im Menü Einstellungen, Fahrzeugeinstellungen, Tagfahrlicht die
Funktion Tagfahrlicht aktiviert oder deaktiviert werden.
AL-76: Im Kombiinstrument kann im Menü Einstellungen, Fahrzeugeinstellungen,
Umfeldbeleuchtung die Funktion Umfeldbeleuchtung aktiviert oder deaktiviert werden.
1.3.2.3 Lenkstockhebel
AL-78: Als Lenkstockhebel wird der an der Lenksäule befestigten Schalthebel bezeichnet.
AL-79: Folgende Positionen können mit den Schalthebel eingestellt werden:
AL-80: Durch Wegdrücken vom Fahrer: Permanentes Aktivieren des Fernlichts bzw. Adaptives
Fernlicht (mit Einrasten des Schalthebels).
AL-81: Durch Heranziehen zum Fahrer: Temporäres Aktivieren des Fernlichts (ohne Einrasten; so
genannte Lichthupe)
AL-82: Durch Bewegen nach oben oder unten: Temporäres bzw. Permanentes Aktivieren der
Fahrrichtungsanzeige nach links oder rechts. Das temporäre Aktivieren erfolgt durch eine
Auslenkung von ca. 5°, das permanente Aktivieren (mit Einrasten) nach ca. 7° Auslenkung.
1.3.2.4 Warnblinklicht-Schalter
AL-84: Abbildung: Warnblinklicht-Schalter
1.3.2.5 Dunkeltaster (nur Sonderschutzfahrzeuge)
AL-127: Abbildung: Dunkeltaster
AL-88: Der Dunkeltaster ist im Bereich des oberen Bedienfeldes angebracht.
1.3.3 Sensoren und Aktuatoren
1.3.3.1 Kamera
AL-132: Die Kamera hat eine Auflösung von 800 x 600 Bildpunkten.
AL-136: Die Bildwiederholrate der Kamera liegt bei 60 Hz
AL-133: Die Kamera löst im Farbbereich 390-1000 nm, d.h. es wird der nahe Infrarotbereich zum Teil
mit abgedeckt.
AL-134: Nach Aktivierung von Klemme 30 führt die Kamera einen Selbststest durch. 2 Sekunden nach
Aktivieren von Klemme 30 liegen verläßliche Bildinformationen vor.
AL-135: Die Kamera sendet die Daten via LVDS.
AL-137: Die Auflösung des Kamerasignals beträgt 24 Bit (je 8 Bit RGB).
OFF

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
12 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
1.3.4 Scheinwerfertechnologie
AL-93: Abblendlicht Leuchtmittel muss Halogen sein.
AL-97: Abblendlicht Leuchtmittel muss LED sein.
AL-96: Abblendlicht Leuchtmittel muss Xenon sein.
1.3.5 Funktionssicherheit
AL-142: Die Funktion des Abblendlichts ist als sicherheitsrelevant im Sinne der ISO 26262
einzustufen.
AL-143: Die Einstufung des System "Adaptives Außenlicht" ist ASIL B.
1.4 Prüfung, Erprobung und Absicherung
AL-141: <Im Demonstrator nicht weiter ausgearbeitet>
2 System Geschwindigkeitsregelung
2.1 Allgemeines
2.1.1 Kurzbeschreibung des Entwicklungsumfangs
FA-15: Das System Geschwindigkeitsregelung umfasst die folgenden kundenerlebbaren Funktionen:
FA-58: Abstandsregeltempomat: Das Fahrzeug hält den Abstand zum vorausfahrenden Fahrzeug
inkl. Bremsen bis Stillstand und Anfahren aus dem Stand.
FA-16: Tempomat: Das Fahrzeug hält selbständig eine eingestellte Geschwindigkeit.
FA-95: Abstandswarner: Das Fahrzeug warnt bei Unterschreitung des Sicherheitsbastnads zum
Vorausfahrenden Fahrzeug den Fahrer optisch und/oder akustisch.
FA-96: Notbremsassistent: Das Fahrzeug verzögert in kritischen Situationen das Fahrzeug bis zum
Stillstand.
FA-17: Geschwindigkeitsbegrenzung: Das Fahrzeug überschreitet nicht eine eingestellte
Geschwindigkeit.
FA-97: Schilderkennung: Das Fahrzeug stellt die Geschwindigkeitsbegrenzung aufgrund der
erkannten Schilder automatisch ein.
FA-98: Bremssassistent: Das Fahrzeug verstärkt bei heftigem Treten der Bremse den Bremsprozess.
FA-100: Stau-Folgefahren: Das Fahrzeug beschleunigt selbstänig aus dem Stand, wenn der
vorausfahrende Fahrzeug sich wieder entfernt.
2.2 Funktionen
2.2.1 Abstandsregeltempomat
FA-2: Das System Abstandsregeltempomat umfasst die folgenden kundenerlebbaren Funktionen:
FA-3: (a) Aktiviert der Fahrer den Tempomat (durch Heranziehen des Tempomat-
Kontrollhebels oder durch Drücken des Tempomat-Kontrollhebels nach oben oder unten),
beginnt das Fahrzeug die eingestellte Geschwindigkeit nach Möglichkeit zu halten.
FA-4: (b) Verringert sich der Abstand zum vorausfahrenden Fahrzeug unter den vorgegebenen
geschwindigkeitsabhängigen Sicherheitsabstand (siehe FA-78), so bremst das Fahrzeug
selbständig ab. Die maximale Verzögerung beträgt dabei 5m/s2.

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
13 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
FA-5: (c) Reicht die maximale Verzögerung von 5m/s2 nicht aus, um voraussichtlich eine
Kollision mit dem vorausfahrenden Fahrzeug zu verhindern, warnt das Fahrzeug den Fahrer
durch zwei akustische Signale (0.1 Sekunde lang, 0.2 Sekunde Abstand) und fordert ihn
dadurch auf, selbst zu reagieren.
FA-6: (d) Vergrößert sich der Abstand zum vorausfahrenden Fahrzeug wieder über den
geschwindigkeitsabhängigen Sicherheitsabstand, beschleunigt das Fahrzeug mit maximal
2m/s2, bis die eingestellte Geschwindigkeit wieder erreicht ist.
FA-99: (e) Verringert sich die Geschwindigkeit des vorausfahrenden Fahrzeugs auf unter
20km/h, wird der Abstand auf 2,5s geregelt, bis zum Stillstand. Für den Stillstand beider
Fahrzeuge wird der absolute Abstand auf 2m eingeregelt. Nimmt das vorausfahrende
Fahrzeug erneut Geschwindigkeit auf, wird der Abstand auf 3s geregelt. Diese Regelung gilt
bis zur Überschreitung der 20km/h Grenze unabhängig von der Benutzervorgabe durch
Abstandsstufe (Drehen des Abstandsregeltempomathebels)
FA-78: Durch Drehen des Abstandsregeltempomat Hebels kann die Stufe des zu haltenden Abstands
zum vorausfahrenden Fahrzeug gewählt werden. Es werden drei Stufen realisiert: 2 Sek, 2,5
Sekunden und 3 Sekunden. Die Benutzervorgabe findet nur innerhalb des
Geschwindigkeitsfensters > 20km/h Anwendung, darunter regelt das System autonom den
Abstand.
2.2.2 Abstandswarner
FA-86: Das System Abstandsregeltempomat muss den Abstand (Zeit) zum vorausfahrenden Fahrzeug
berechnen und abhängig vom konkreten Wert vor zu geringem Abstand warnen wie folgt:
FA-81: Akustisches Warnsignal wenn der Ist-Abstand kleiner als (aktuelle
Geschwindigkeit/3,6 )*t ist.
FA-82: Optisches Warnsignal wenn der Ist-Abstand kleiner als (aktuelle
Geschwindigkeit/3,6 )*t2 ist.
2.2.3 Notbremsassistent
FA-85: Die Funktion Notbremsassistent muss in den folgenden Geschwindigkeitsfenstern zur
Verfügung stehen: 0 bis 60km/h für Notbremsungen auf stehende Hindernisse, 0 bis 120km/h
auf sich bewegende Hindernisse.
FA-84: Abhängig vom Wert, welcher die maximale Negativbeschleunigung angibt, wird die Zeit
bestimmt, die es dauert bis das Fahrzeug vollständig zum Stehen gekommen ist. Befindet sich
ein Objekt vor dem Fahrzeug und ist die Zeit bis zum Aufprall kleiner oder gleich die Zeit bis
zum Stillstand + ta Sekunden, so wird ein akustisches Signal ausgegeben und die Bremse zu
x% aktiviert. Ist die Zeit bis zum Aufprall kleiner oder gleich die Zeit bis zum Stillstand + ta2
Sekunden (mit ta > ta2), so wird die Bremse zu y% aktiviert. Ist die Zeit bis zum Aufprall
kleiner oder gleich die Zeit bis zum Stillstand, so wird die Bremse zu 100% aktiviert.
2.2.4 Tempomat
FA-19: Der Tempomat wird mit Hilfe des Tempomathebels aktiviert:
FA-20: (a) Wird bei deaktiviertem Tempomat der Tempomathebel herangezogen, so wird als Soll-
Geschwindigkeit die zuletzt gewählte Soll-Geschwindigkeit genommen.
FA-21: (b) Wurde seit dem letzten Motorstart keine Soll-Geschwindigkeit eingestellt, so wird beim
Heranziehen des Tempomathebels die aktuelle Ist-Geschwindigkeit als Soll-Geschwindigkeit
genommen. Beträgt die Ist-Geschwindigkeit weniger als 20 km/h, wird die Geschwindigkeit

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
14 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
nicht als Soll-Geschwindigkeit übernommen und es findet kein Aktivieren des Tempomat
statt.
FA-22: (c) Wird bei deaktiviertem Tempomat der Tempomathebel nach oben oder unten bewegt, so
wird als Soll-Geschwindigkeit die aktuelle Ist-Geschwindigkeit genommen.
FA-23: Die Ist-Geschwindigkeit des Fahrzeugs wird durch Regelung der Beschleunigung und
Regelung der Verzögerung an die Soll-Geschwindigkeit angenähert.
FA-24: Solange der Tempomat aktiviert ist, hält das Fahrzeug die aktuelle Geschwindigkeit ohne dass
der Fahrer weiter das Gaspedal oder das Bremspedal betätigen muss.
FA-25: Drückt der Fahrer den Tempomathebel bei aktiviertem Tempomat innerhalb der ersten
Widerstandsstufe nach oben, so wird die Soll-Geschwindigkeit des Tempomaten um den Wert
N erhöht.
FA-59: Drückt der Fahrer den Tempomathebel bei aktiviertem Tempomat über die erste
Widerstandsstufe (über den Druckpunkt) nach oben, so wird die Soll-Geschwindigkeit des
Tempomaten auf den nächsten ganzen 10er Wert erhöht.
FA-90: Beispiel: Ausgangsgeschwindigkeit 57km/h -> Setzgeschwindigkeit 60km/h
FA-26: Drückt der Fahrer den Tempomathebel bei aktiviertem Tempomat innerhalb der ersten
Widerstandsstufe nach unten, so wird die Soll-Geschwindigkeit des Tempomaten um den
Wert N gesenkt.
FA-60: Drückt der Fahrer den Tempomathebel bei aktiviertem Tempomat über die erste
Widerstandsstufe (über den Druckpunkt) nach unten, so wird die Soll-Geschwindigkeit des
Tempomaten auf den nächsten 10er Wert verringert.
FA-91: Beispiel: Ausgangsgeschwindigkeit 57km/h -> Setzgeschwindigkeit 50km/h
FA-61: Drückt der Fahrer den Tempomathebel bei aktiviertem Tempomat über die erste
Widerstandsstufe (über den Druckpunkt) nach oben und hält ihn dort für eine Zeit > t
Sekunden, so wird die Soll-Geschwindigkeit des Tempomaten alle t Sekunden auf den
nächsten 10er Wert erhöht.
FA-92: Beispiel: Ausgangsgeschwindigkeit 57km/h, t = 2Sekunden -> nach 2 Sek.
Setzgeschwindigkeit 60km/h nach 4 Sek. 70km/h, nach 6 Sek. 80km/h usw.
FA-63: Drückt der Fahrer den Tempomathebel bei aktiviertem Tempomat über die erste
Widerstandsstufe (über den Druckpunkt) nach unten und hält ihn dort für eine Zeit > t
Sekunden, so wird die Soll-Geschwindigkeit des Tempomaten alle t Sekunden auf den
nächsten 10er Wert verringert.
FA-93: Beispiel: Ausgangsgeschwindigkeit 57km/h, t = 2Sekunden -> nach 2 Sek.
Setzgeschwindigkeit 50km/h nach 4 Sek. 40km/h, nach 6 Sek. 30km/h usw.
FA-62: Drückt der Fahrer den Tempomathebel bei aktiviertem Tempomat innerhalb der ersten
Widerstandsstufe (nicht über den Druckpunkt) nach oben und hält ihn dort für eine Zeit > t
Sekunden, so wird die Soll-Geschwindigkeit des Tempomaten alle t Sekunden um den Wert
N erhöht.
FA-94: Beispiel: Ausgangsgeschwindigkeit 57km/h, N=1km/h, t = 2Sekunden -> nach 2 Sek.
Setzgeschwindigkeit 58km/h nach 4 Sek. 59km/h, nach 6 Sek. 60km/h usw.
FA-64: Drückt der Fahrer den Tempomathebel bei aktiviertem Tempomat innerhalb der ersten
Widerstandsstufe (nicht über den Druckpunkt) nach unten und hält ihn dort für eine Zeit > t
Sekunden, so wird die Soll-Geschwindigkeit des Tempomaten alle t Sekunden um den Wert
N verringert.
FA-87: Beispiel: Ausgangsgeschwindigkeit 57km/h, N=1km/h, t = 2Sekunden -> nach 2 Sek.
Setzgeschwindigkeit 56km/h nach 4 Sek. 55km/h, nach 6 Sek. 54km/h usw.

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
15 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
FA-27: Betätigt der Fahrer das Gaspedal und wird durch die Stellung des Gaspedals mehr
Beschleunigung erzeugt als durch den Tempomant, so wird die Beschleunigungseinstellung
durch den Fahrer übernommen.
FA-28: Durch Betätigen der Fuß- oder Feststellbremse wird der Tempomat deaktiviert, bis er erneut
aktiviert wird.
2.2.5 Geschwindigkeitsbegrenzung
FA-30: Die Geschwindigkeitsbegrenzung wird mit Hilfe des Geschwindigkeitsbegrenzungshebels
aktiviert.
FA-31: Die aktuelle Ist-Geschwindigkeit wird als Begrenzungsgeschwindigkeit genommen.
FA-32: Solange die Geschwindigkeitsbegrenzung aktiviert ist, kann die Ist-Geschwindigkeit nicht die
eingestellte Begrenzungsgeschwindigkeit überschreiten.
FA-65: Drückt der Fahrer den Geschwindigkeitsbegrenzungshebel bei aktiviertem
Geschwindigkeitsbegrenzung innerhalb der ersten Widerstandsstufe nach oben, so wird die
Soll-Geschwindigkeit des Geschwindigkeitsbegrenzung um den Wert N erhöht.
FA-66: Drückt der Fahrer den Geschwindigkeitsbegrenzungshebel bei aktiviertem
Geschwindigkeitsbegrenzung über die erste Widerstandsstufe (über den Druckpunkt) nach
oben, so wird die Soll-Geschwindigkeit des Geschwindigkeitsbegrenzung auf den nächsten
10er Wert erhöht.
FA-88: Beispiel: Ausgangsgeschwindigkeit 57km/h -> Setzgeschwindigkeit 60km/h
FA-67: Drückt der Fahrer den Geschwindigkeitsbegrenzungshebel bei aktiviertem
Geschwindigkeitsbegrenzung innerhalb der ersten Widerstandsstufe nach unten, so wird die
Soll-Geschwindigkeit des Geschwindigkeitsbegrenzung um den Wert N gesenkt.
FA-68: Drückt der Fahrer den Geschwindigkeitsbegrenzungshebel bei aktiviertem
Geschwindigkeitsbegrenzung über die erste Widerstandsstufe (über den Druckpunkt) nach
unten, so wird die Soll-Geschwindigkeit des Geschwindigkeitsbegrenzung auf den nächsten
10er Wert verringert.
FA-89: Beispiel: Ausgangsgeschwindigkeit 57km/h -> Setzgeschwindigkeit 50km/h
FA-35: Durch Drücken des Gaspedals über 90%, wird die Geschwindigkeitsbegrenzung kurzzeitig
deaktiviert.
FA-36: Wird das Gaspedal anschließend wieder zu weniger als 90% betätigt, aktiviert sich die
Geschwindigkeitbegrenzung selbständig wieder.
FA-37: Eine aktive Geschwindigkeitsbegrenzung kann durch den Fahren mittels des
Geschwindigkeitsbegrenzungshebels wieder deaktiviert werden.
2.2.5.1 Schilderkennung
FA-77: Wird bei aktivierter Geschwindigkeitsbegrenzung ein Schild mit
Geschwindigkeitsbegrenzungsangabe F km/H nach lokaler StVO (zulässige
Höchstgeschwindigkeit) erkannt wird die maximale Geschwindigkeit auf den Wert F von
diesem gesetzt.
2.2.6 Bremsassistent
FA-75: Wird das Bremspedal über einen bestimmten Schwellwert M gedrückt, so wird die
Bremskraft auf 100% verstärkt.

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
16 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
2.3 Eigenschaften und Randbedingungen, Schnittstellen
2.3.1 Bedienelemente und Einstellungen
2.3.1.1 Tempomathebel
FA-41: Abbildung: Tempomathebel mit den vier Bewegungsrichtungen
FA-42: Der Tempomathebel ist am Mantelrohrschaltermodul befestigt.
2.3.1.2 Geschwindigkeitsbegrenzungshebel
FA-44: Abbildung: In den Tempomathebel integrierter Geschwindigkeitsbegrenzungshebel
FA-45: Das Aktivieren/Deaktivieren der Geschwindigkeitbgebgrenzung erfolgt durch Drücken auf
den Kopf des Tempomathebels.
FA-46: Die Umschaltung des Tempomathebels auf Geschwindigkeitsbegrenzung wird dem Fahrer
durch eine in den Tempomathebel integriertern LED angezeigt. Zudem erfolgt eine haptische
Rückmeldung (Einrasten/Ausrasten des Hebels).
2.3.1.3 Bremspedal
FA-48: Das Bremspedal ist im Fußraum des Fahrers angebracht.
2.3.1.4 Gaspedal
FA-50: Das Gaspedal ist im Fußraum des Fahrers angebracht.
2.3.2 Funktionssicherheit
FA-52: Die Funktion des Systems ist als sicherheitsrelevant im Sinne der ISO 26262 einzustufen.
FA-53: Die Einstufung des System "Geschwindigkeitsregelung" ist ASIL B.
2.4 Prüfung, Erprobung und Absicherung
FA-55: <Im Demonstrator nicht weiter ausgearbeitet>
3 Eigenschaften und Randbedingungen
Arc-71: Der Einbau der Systeme erfolgt grundsätzlich in Links- und Rechtslenker-Fahrzeuge.

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
17 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
4 Schnittstellen
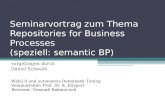
4.1 Übersicht E/E-Architektur
Arc-34: Abbildung: E/E-Architektur High-End-Ausbaustufe
Blinkerleuchte Außenspiegel links;
Türstatus
Blinkerleuchte Außenspiegel links;
Türstatus
Blinker-Leuchten vorne links und rechts;Leuchten Abbiegelicht
Blinkerleuchten hinten links und rechts;
Bremslicht; Schlussleuchte
Fernlicht-Leuchten;Fernlicht-Stellmotor;
Leuchten Abblendlicht
LenkstockhebelTempomat-KontrollhebelLenkwinkel
Warnblink-SchalterDunkeltaster
MotorGaspedal
Radar-Sensoren
Infotainment CAN (F-CAN)
Fahrdynamik-Flexray (F-FLEX)
Lichtdrehschalter(LDS)
LIN
Türsteuergerät(vorne links) (TSG)
Brems-Pedal;Rad-Drehzahlen
Zündschloss
KameraInnenraumCAN
(I-CAN)Regen-/Licht-Sensor
Dachbedien-einheit (DBE)
LVDS
LVDS
<optional> <optional>
Türsteuergerät(vorne rechts) (TSG)
Fernlicht-Modul(FLM)
InfotainmentGateway (IGW)
Body-Controller Front (BC_F)
Kombi-Instrument(KI)
Body-Controller Heck (BC_H)
Motor-Steuergerät (MSG)
Zentraldisplay(ZD)
Head-Unit(HU)
ESP Steuergerät(ESP)
Radar-Unit (RU)
ElektronischesZündschloss (EZS)
Kamera-Unit(KU)
Mantelrohr-Schaltermodul (MRSM)
Oberes Bedienfeld(OBF)
ZentralesGateway (ZGW)

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
18 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
Arc-37: Abbildung: E/E-Architektur Compact Car
4.2 Parameter
Bedeutung I-
CAN
F-
CAN
F-
FLEX
LIN
-Bus
Sender Lae
nge
Min-
Wert
Max
-Wert
Enumeration/Codierung
R_Schluessel_st Klemme 15, d.h.
Status des
Zünschlüssels
X X X GW bzw.
EZS
5
Bit
0 31 0 - Kein Schlüssel gesteckt
1 - Schlüssel steckt
2 - Schlüssel in Radio-Stellung
3 - Schlüssel in Stellung Zündung
an
4 - Schlüssel in Stellung Anlassen
5 .. 6 - nicht verwendet
7 - Fehler
P_Schluessel_b Schlüssel steckt X 1
Bit
0 1 0 - Kein Schlüssel steckt im Schloss
1 - Schlüssel steckt im Schloss
CONFIG_1 Fahrzeugkonfigurati
on Links-
/Rechtslenker
X X X GW bzw.
EZS
2
Bit
0 3 0 - Linkslenker
1 - Rechtlenker
2 - nicht verwendet
3 - Fehler
R_Fahrzeuggesc
hwindigkeit_km
h
Aktuelle
Fahrzeuggeschwindi
gkeit
X X X 16
Bit
0 655
35
Auflösung 0,1 km/h
Wertebereich 0.0 km/h .. 6553.4
km/h
65535 - Fehler
R_Lichtdrehscha
lter_b
Status
Lichtdrehschalter
X X LDS 3
Bit
0 3 0 - Aus
1 - Auto (Automatikposition)
Blinkerleuchte Außenspiegel links;
Türstatus
Blinkerleuchte Außenspiegel links;
Türstatus
Blinker-Leuchten vorne links und rechts;Leuchten Abbiegelicht
Blinkerleuchten hinten links und rechts;
Bremslicht; Schlussleuchte
Fernlicht-Leuchten;Fernlicht-Stellmotor
Leuchten Abblendlicht
LenkstockhebelTempomat-Kontrollhebel
Warnblink-Schalter;Dunkeltaster
MotorGaspedal
Radar-Sensoren
Infotainment CAN
Fahrdynamik-Flexray
LIN
Brems-Pedal;Rad-Drehzahlen
Zündschloss
InnenraumCAN
LIN
Regen-/Licht-Sensor
LVDS
<optional> <optional>
<optional>
Kombi-Instrument(KI)
Body-ControllerCommon (BC_C)
Fernlicht-Modul(FLM)
Mantelrohr-Schaltermodul (MRSM)
Oberes Bedienfeld(OBF)
Motor-Steuergerät(MSG)
Gateway (GW)
Zentraldisplay(ZD)
Head-Unit(HU)
ZentralesGateway (ZGW)
ESP Steuergerät(ESP)
Lichtdrehschalter(LDS)
Türsteuergerät(vorne links) (TSG)
Radar-Unit (RU)
Dachbedien-einheit (DBE)
Türsteuergerät(vorne rechts) (TSG)

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
19 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
Bedeutung I-
CAN
F-
CAN
F-
FLEX
LIN
-Bus
Sender Lae
nge
Min-
Wert
Max
-Wert
Enumeration/Codierung
2 - Abblendlicht (LoBm)
3 - Parklicht links (PkLmp_Lt)
4 - Parklicht rechts (PkLmp_Rt)
5 - Standlicht (PosnLmp)
6 - nicht verwendet
7 - Fehler
R_Aussenhellig
keit_lx
Meßwert Regen-
/Lichtsensor bzgl.
Helligkeit
X X DBE 16
Bit
0 655
35
Auflösung 0.0001
Wertebereich 0.0 .. 1.0 (d.h. Werte 0
.. 10000)
10001 .. 65534 - nicht verwendet
65535 - Fehler
R_L_STATUS_
2
Status Regen-
/Lichtsensor bzgl.
Regen
X X DBE 2
Bit
0 3 0 - Kein Regen erkannt
1 - Leichter Regen erkannt
2 - Schwerer Regen erkannt
3 - Fehler (z.B. Sensor verschmutzt)
R_RBLinksAkti
v_b
Richtungsblinken
Links durchführen
X X 1
Bit
0 1 0 - Kein Blinken
1 - Richtungsblinken links
R_RBRechtsAkt
iv_b
Richtungsblinken
Rechts durchführen
X X 1
Bit
0 1 0 - Kein Blinken
1 - Richtungsblinken rechts
R_Warnblinken
Aktiv_b
Warnblinken
durchführen
X X 1
Bit
0 1 0 - Kein Blinken
1 - Warnblinken
U_Batt Verfügbare
Batteriespannung an
Klemme 30
X X X BC_F
bzw.
BC_C
10
Bit
0 102
4
Auflösung 0.1V
Wertebereich 0.0V .. 50.0 V
Werte 501 .. 1022 - Nicht verwendet
1023 - Fehler
LMP_STATUS_
B_VL
Blinkerstatus
Blinker-Leuchten
vorne links
X BC_F
bzw.
BC_C
2
Bit
0 3 0 - Lampe i.O.
1 - Lampe defekt
2 - nicht verwendet
3 - Fehler (z.B. unplausibler
Widerstandswert der Lampe)
LMP_STATUS_
B_VR
Blinkerstatus
Blinker-Leuchten
vorne rechts
X BC_F
bzw.
BC_C
wie LMP_STATUS_B_VL
LMP_STATUS_
B_SL
Blinkerstatus
Blinker-Leuchten
Sidemarker links
X TSG wie LMP_STATUS_B_VL
LMP_STATUS_
B_SR
Blinkerstatus
Blinker-Leuchten
Sidemarker rechts
X TSG wie LMP_STATUS_B_VL
LMP_STATUS_
B_HL
Blinkerstatus
Blinker-Leuchten
hinten links
X BC_H
bzw.
BC_C
wie LMP_STATUS_B_VL
LMP_STATUS_
B_HR
Blinkerstatus
Blinker-Leuchten
hinten rechts
X BC_H
bzw.
BC_C
wie LMP_STATUS_B_VL
LMP_STATUS_
AL_VL
Status Leuchte
Abblendlicht vorne
X FLM wie LMP_STATUS_B_VL

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
20 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
Bedeutung I-
CAN
F-
CAN
F-
FLEX
LIN
-Bus
Sender Lae
nge
Min-
Wert
Max
-Wert
Enumeration/Codierung
Links
LMP_STATUS_
AL_VR
Status Leuchte
Abblendlicht vorne
rechts
X FLM wie LMP_STATUS_B_VL
LMP_STATUS_
AB_VL
Status Leuchte
Abbiegelicht vorne
links
X BC_F
bzw.
BC_C
wie LMP_STATUS_B_VL
LMP_STATUS_
AB_VR
Status Leuchte
Abbiegelicht vorne
rechts
X BC_F
bzw.
BC_C
wie LMP_STATUS_B_VL
LMP_STATUS_
BL_HL
Status Leuchte
Bremslicht hinten
links
X BC_H
bzw.
BC_C
wie LMP_STATUS_B_VL
LMP_STATUS_
BL_HR
Status Leuchte
Bremslicht hinten
rechts
X BC_H
bzw.
BC_C
wie LMP_STATUS_B_VL
LMP_STATUS_
SL_HL
Status Leuchte
Schlussleuchte
hinten links
X BC_H
bzw.
BC_C
wie LMP_STATUS_B_VL
LMP_STATUS_
SL_HR
Status Leuchte
Schlussleuchte
hinten rechts
X BC_H
bzw.
BC_C
wie LMP_STATUS_B_VL
LMP_STATUS_
FL_VL
Status Leuchte
Fernlicht vorne
Links
X FLM 3
Bit
0 7 0 - Lampe i.O.
1 - Lampe defekt
2 - Stellmotor Leuchte defekt
3 .. 6 - nicht verwendet
7 - Fehler (z.B. unplausibler
Widerstandswert der Lampe)
LMP_STATUS_
FL_VL
Status Leuchte
Fernlicht vorne
Links
X FLM wie LMP_STATUS_FL_VL
P_Abblendlicht_
b
Ansteuerung
Abblendlicht
X 1
Bit
0 1 0 - Abblendlicht aus
1 - Abblendlicht ein
R_Fernlicht_b Ansteuerung
Fernlicht
X 1
Bit
0 1 0 - Leuchte aus
1 - Leuchte an
P_Ausleuchtung
_m
Ausleuchtweite
Fernlicht
X 10
Bit
0 102
3
0 .. 300 - Einzustellende
Ausleuchtweite
301 .. 1023 - nicht verwendet
FLT_MOT_CM
D
Soll-Stellung
Fernlicht-Stellmotor
X 4
Bit
0 15 0 .. 15 Sollstellung gem. folgender
Tabelle:
0 - 65m
1 - 100m
2 .. 14 - 120 .. 360m (20m
Schrittweite)
15 - nicht verwendet
P_FRAAL_b Ansteuerung
Blinkerleuchte
Sidemarker links
X 1
Bit
0 1 0 - Leuchte aus
1 - Leuchte an

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
21 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
Bedeutung I-
CAN
F-
CAN
F-
FLEX
LIN
-Bus
Sender Lae
nge
Min-
Wert
Max
-Wert
Enumeration/Codierung
P_FRAAR_b Ansteuerung
Blinkerleuchte
Sidemarker rechts
X 1
Bit
0 1 0 - Leuchte aus
1 - Leuchte an
P_FRAHL_b Ansteuerung
Blinkerleuchte vorne
links
X 1
Bit
0 1 0 - Leuchte aus
1 - Leuchte an
P_FRAHR_b Ansteuerung
Blinkerleuchte vorne
rechts
X 1
Bit
0 1 0 - Leuchte aus
1 - Leuchte an
P_FRAVL_b Ansteuerung
Blinkerleuchte
hinten links
X 1
Bit
0 1 0 - Leuchte aus
1 - Leuchte an
P_FRAVR_b Ansteuerung
Blinkerleuchte
hinten rechts
X 1
Bit
0 1 0 - Leuchte aus
1 - Leuchte an
P_AbbiegelichtL
inks_pc
Status Abbiegelicht
(Abbiegen nach
Links)
X 7
Bit
0 127 0 .. 100 - Ansteuerung in Prozent
101 .. 127 Lampe aus
P_Abbiegelicht
Rechts_pc
Status Abbiegelicht
(Abbiegen nach
Rechts)
X 7
Bit
0 127 0 .. 100 - Ansteuerung in Prozent
101 .. 127 Lampe aus
ST_LENKSTO
CK_B
Status
Lenkstockhebel bzgl.
Blinker (vertikale
Verstellung des
Hebels)
X MRSM 3
Bit
0 7 0 - Neutralstellung
1 - Auslenkung nach unten um 5°
erkannt
2 - Auslenkung nach unten um 7°
erkannt
3 - Auslenkung nach oben um 5°
erkannt
4 - Auslenkung nach oben um 7°
erkannt
5 .. 6 - nicht verwendet
7 - Fehler
ST_LENKSTO
CK_FL
Status
Lenkstockhebel bzgl.
Fernlicht
(horizontale
Verstellung des
Hebels)
X MRSM 2
Bit
0 3 0 - Neutralstellung
1 - Auslenkung nach hinten erkannt
2 - Auslenkung nach vorne erkannt
3 - Fehler
TMP_POS Position Tempomat-
Hebel
X MRSM 3
Bit
0 7 0 - Tempomat-Hebel in
Neutralstellung
1 - Hebel nach oben ausgelenkt 5°
2 - Hebel nach oben ausgelenkt 7°
3 - Hebel nach unten ausgelenkt 5°
4 - Hebel nach unten ausgelenkt 7°
5 - Hebel nach vorne ausgelenkt
6 - Hebel nach hinten ausgelenkt
7 - Fehler
LIM_STATUS Status Limiter
(integriert in
X MRSM 2
Bit
0 3 0 - Limiter nicht aktiviert
1 - Limiter aktiviert

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
22 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
Bedeutung I-
CAN
F-
CAN
F-
FLEX
LIN
-Bus
Sender Lae
nge
Min-
Wert
Max
-Wert
Enumeration/Codierung
Tempomat-Hebel) 2 - nicht verwendet
3 - Fehler
LNK_WINKEL Lenkwinkel (d.h.
Auslenkung des
Lenkrads)
X MRSM 10
Bit
0 102
3
0 - Sensor wird kalibriert
1 .. 410 - Lenkraddrehung nach
Links (Auflösung 1° ab 10°
Auslenkung)
411 .. 510 Lenkraddrehung nach
Links (Auflösung 0,1°, 0° - 10°
Auslenkung)
511 ..513 - Lenkrad in
Neutralstellung
514 .. 613 - Lenkraddrehung nach
Rechts (Auflösung 0,1°, 0° - 10°
Auslenkung)
613 .. 1022 - Lenkraddrehung nach
Rechts (Auflösung 1°, ab 10°
Auslenkung)
1023 - Fehler
R_Warnblinken
_b
Status Warnblink-
Schalter
X OBF 2
Bit
0 3 0 - Warnblink-Schalter nicht aktiv
1 - Warnblink-Schalter aktiv
2 - nicht verwendet
3 - Fehler
DKT_STATUS Status Dunkeltaster
(nur
Sonderschutzfahrzeu
ge)
X OBF 2
Bit
0 3 0 - Dunkeltaster nicht aktiv
1 - Dunkeltaster aktiv
2 - nicht verwendet
3 - Fehler
BRMS_STATU
S
Auslenkung des
Bremspedals aus der
Ruheposition
X ESP 8
Bit
0 255 Auflösung 0,2°
Wertebereich 0 - 45° d.h. 0 - 225
226 .. 254 - Nicht verwendet
255 - Fehler
RDR_STATUS Status Fernbereichs-
Radarsensoren
X RU 2
Bit
0 3 0 - Sensor wird kalibriert
1 - Sensor betriebsbereit
2 - Sensor verschmutzt
3 - Sensor nicht betriebsbereit
RDR_DETECT Ergebnis
Auswertung
Fernbereichs-
Radarsensoren
X RU 8
Bit
0 255 0 - Kein Hindernis im Fahrkorridor
erkannt
1 .. 200 - Hindernis im Fahrkorridor
erkannt; Entfernung in Meter
201 .. 254 - nicht verwendet
255 - Fehler
R_EntFahrzeug_
b
Entgegenkommende
s Fahrzeug erkannt
X 1
Bit
0 1 0 - Kein entgegenkommentes
Fahrzeug erkannt
1 - Entgegenkommendes Fahrzeug
erkannt
R_Entriegelt_b Status
Fahrzeugverriegelun
g
X 1
Bit
0 1 0 - Fahrzeug entriegelt
1 - Fahrzeug verriegelt

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
23 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
Bedeutung I-
CAN
F-
CAN
F-
FLEX
LIN
-Bus
Sender Lae
nge
Min-
Wert
Max
-Wert
Enumeration/Codierung
VID_STATUS Status Kamera X KU 2
Bit
0 3 0 - Sensor wird kalibriert
1 - Sensor betriebsbereit
2 - Sensor verschmutzt
3 - Sensor nicht betriebsbereit
GAS_STATUS Auslenkung des
Gaspedals aus der
Ruheposition
X MSG 8
Bit
0 255 Auflösung 0,2°
Wertebereich 0 - 45°, d.h. 0 - 225
226 .. 254 - Nicht verwendet
255 - Fehler
N_MOT Drehzahl des Motors X X X MSG 10
Bit
0 102
3
0 .. 1000 - Aktuelle Drehzahl,
Auflösung 10 U/min (d.h. 0 ..
10.000 U/Min)
1001 .. 1022 - Nicht verwendet
1023 - Fehler (Meßwert steht nicht
zur Verf•gung)
ROT_VL Raddrehzahl Vorne
Links
X X X ESP 16
Bit
0 655
34
Auflösung Rastungen pro Minute,
wobei eine Rastung = 360/24°
D.h. 0..65534 = 0 .. 2730 U/Min
R_TuerLinks_St Status der
Fahrzeugtüren Links
X TSG 4
Bit
0 15 A0 A1 A2 A3 mit
A0, A1: Tür vorne 00 = Tür
offen, 01 = Tür geschlossen, 10 n.a.
11: Fehler
A2, A3: Tür hinten links 00 = Tür
offen, 01 = Tür geschlossen, 10 n.a.
11: Fehler
R_TuerRechts_S
t
Status der
Fahrzeugtüren
Rechts
X TSG 4
Bit
0 15 A0 A1 A2 A3 mit
A0, A1: Tür vorne 00 = Tür
offen, 01 = Tür geschlossen, 10 n.a.
11: Fehler
A2, A3: Tür hinten links 00 = Tür
offen, 01 = Tür geschlossen, 10 n.a.
11: Fehler
R_Motor_b Status Motor X X 1
Bit
0 1 0 - Motor aus
1 - Motor läuft (oder Fehler)
IC_CFG_1 Gewählte
Konfiguration im
Kombi-Instrument
X X KI 8
Bit
0 255 A0 A1 A2 A3 A4 A5 A6 A7 mit
A0: 1 = Tagfahrlicht aktiviert, 0 =
Tagfahrtlicht deaktiviert
A1: 1 = Umfeldbeleuchsung
aktiviert, 0 = Umfeldbeleuchtung
deaktiviert
A2 ..A7 - Keine Bedeutung
R_TrafficSign Erkanntes
Verkehrszeichen
(Geschwindigkeitsbe
grenzung)
X X KU 8
Bit
0 255 A0, A1, A2, A3 ... A7 mit
A0: 0 = gültiges Signal, 1 =
Fehler
A1: 0 = Schild ohne Zusatz, 1 =
Schild mit Zusatz
A2: 0 = Kein Schild erkannt, 1 =
Schild erkannt
A3...A7: Erkannter

© SPES Company
Keine Aenderung ohne Zustimmung der federfuehrenden Konstruktion /
Any alterations are subject to the approval of the design department
Bearbeiter.:
Abteilung:
Datum:
Stand:
Auftr.-Nr.:
Seite/page:
Druckdatum: 2017-04-11
004
2013-08-01
Dr. Frank Houdek
SPES R&D
24 von 24
System-Lastenheft
SyS-LH C34-223
Automotive System Cluster
Bedeutung I-
CAN
F-
CAN
F-
FLEX
LIN
-Bus
Sender Lae
nge
Min-
Wert
Max
-Wert
Enumeration/Codierung
Geschwindigkeitswert mit folgender
Codierung 0=20, 1=30, 2=40, ...
11=130, 12...31=Keine Bedeutung
4.3 Parameter
Name Kenn
er
Bedeutung Funktion Min-
Wert
Max-
Wert
SW_Umgebungshelligkeit_
1
S1 Wird der Schwellwert unterschritten, wird
das Abblendlicht aktiviert.
Abblendlicht 0 6553
5
SW_Umgebungshelligkeit_
2
S2 Wird der Schwellwert überschritten, wird
das Abblendlicht deaktiviert.
Abblendlicht 0 6553
5
SW_Akust_Warn t Korrekturfaktor bei Berechnung Abstand
(Zeit) zum Vorderfahrzeug bei akustischer
Warnung
Abstandswarner 0 100
SW_Opt_Warn t2 Korrekturfaktor bei Berechnung Abstand
(Zeit) zum Vorderfahrzeug bei optischer
Warnung
Abstandswarner 0 100
Verzoegerung_Max aneg Maximale negative Verzögerung des
Fahrzeugs
Notbremsassistent 0 100
Aufprall_1 ta Schwelle für Ansprechen des
Notbremsassistenten mit akustischer
Warnung und Verzögerung x%
Notbremsassistent 0 100
Aufprall_2 ta2 Schwelle für Ansprechen des
Notbremsassistenten bei Verzögerung y%
Notbremsassistent 0 100
Bremsaktivierung_1 x Bremsaktivierung Notbremsassistent Stufe 1 Notbremsassistent 0 100
Bremsaktivierung_2 y Bremsaktivierung Notbremsassistent Stufe 2 Notbremsassistent 0 100
Schrittweite_Tempomat N Schrittweite zur Einstellung des Tempomat Tempomat 1 10
Delay_Autorepeat t Zeitintervall, nachdem bei gehaltenem
Tempomathebel der Tempomat-Sollwert
automatisch gergrößert bzw. verkleinert wird
Tempomat 1 10
Schrittweite_Geschwindigk
eitsregelung
N Schrittweite zur Einstellung der
Geschwindigkeitsregelung
Geschwindigkeitsbegrenzu
ng
1 10
Schwellwert_Bremspedal M Wird der Schwellwert überschritten, wird der
Bremsassistent aktiv
Bremsassistent 0 255