System Co-design through Co-Simulation - ARPA-E. StRock... · 2018-08-14 · System and Supervisory...
7
Presented by Brian St Rock, PjL UTRC PI Veronica Adetola, Larry Zeidner ARPA-E Co-design Workshop July 26, 2019 System Co-design through Co-Simulation
Transcript of System Co-design through Co-Simulation - ARPA-E. StRock... · 2018-08-14 · System and Supervisory...

Presented by
Brian St Rock, PjL
UTRC PI
Veronica Adetola, Larry Zeidner
ARPA-E Co-design
Workshop
July 26, 2019
System Co-design through Co-Simulation

Defining what’s next:
UTRC is UTC’s
innovationengine
Berkeley, CA
East Hartford, CT
ShanghaiChina
CorkIreland
Rome & TrentoItaly
Definenew
frontiers
Co-developnew
technologies
Solvetough
problems
Serveas hub for
technical
interchange
Leverageglobal network
of innovation
MonetizeUTC
intellectual
property
Aglobal
presence
Globalcollaborations

Concurrent System Design – Motivating Example
High performance, next generation systems require increased integration and adaptiveness
This page contains no technical data subject to the EAR or the ITAR.
3
Lesson Learned: Cannot assess value of new architectures without early consideration of performance, robustness, & controls
Fundamental controllability issuesLate learning & engineering changesHardware over-specification
More-Electric Aircraft
Outcome:
Control Interdependency Matrix (1 subsystem shown)
Industry-leading fuel burn achieved through highly integrated and adaptive power and thermal management
Conventional More-Electric
Conventional Design
Metric Conventional More-Electric
Control Loops ~5 ~40
Lines of Code 200k 600k

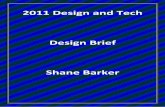
System and Supervisory Control Co-design
Hybrid refrigeration for Truck/Trailer • Design output: Battery size, voltage, control set-points, parameters and limits
• Multi-objective optimization1. Cost (Battery +Power electronics)2. Battery capacity loss
• System-level constraints1. Maintain cargo temperature: 2. One hour autonomous battery operation3. At least 15 years of battery life
• Variabilities – cooling load, usage• Model uncertainties
12.5 13 13.5 14 14.54
6
8
10
12
14
16
18
20
PE
+ b
atte
ry c
ost in
$K
% Battery capacity loss @ 15 years
Optimization Progress and Pareto Front
Benefits: Fuel savingsReduced emission & noiseReduced food waste
Simulation-based design - Bayesian optimization based on Gaussian process
UTC proprietary. No technical data subject to the EAR or the ITAR.4

Co-design: Sensors, Actuators and Control
Synergetic system design for maximalachievable performance
UTC proprietary. No technical data subject to the EAR or the ITAR.5

DISCOVER: Computational Intelligence for System Design
Automated exploration and evaluation of system (plant & control) architectures
UTC proprietary. No technical data subject to the EAR or the ITAR.7
Problem Def Exploration Machine Learning
Optimization
Inputs
Video
Improvements: 5X Performance, 2X Volume, >15X Cycle Time
• Requirements• System-level metrics• Technology options• Flow types • Mission segments• Composition rules

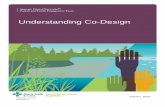
DISCOVER: Computational Intelligence for System Design
Model-Based Exploration of Safety (FHA), Protective Controls, and Reconfigurability
UTC proprietary. No technical data subject to the EAR or the ITAR.7
Flight Phase 1
OM 2
OM5
OM4
OM8
OM
10
OM7
OM6
OM 1
OM 3
OM9
“Dark
Aircraft”
(Start & End)All OMs must be
reachable from and reachable to OM1
SPT- & Timing-Feasible
Transition Path (TP)
Transition
Modes
UnreachableOperating Mode
Timing-Infeasible
Transition Paths(take too long)
0,1,7
0,3,5
0,2,3
0,3,5
0,2,7
0,3,7
0,1,5
0,1,5
Supported
Failure Modes
Off
Flight Phase 2 Flight Phase 3
OM
11
0,2,5
Component-Failure
Transition Paths
Flight-Phase
ChangeTransition
Paths
Compliance by Construction Generates only safety-compliant system architectures
Source PrioritiesFinds all Operating Modes and the Transition Paths between them
Architecture = Union(OMs)
Builds Operating Mode Graph, spanning all of the mission’s flight phases.
Reconfigurability: Operating Modes
Discrete Supervisory Control Exploration Dynamic Controls Assessment
Off-DesignModels need to capable of sizing, off-design performance, and dynamics
DynamicsAuto generation of piecewise-defined linear dynamic models
Linear Model & Dynamic RGA