
SUMMER PROJECT May-June, 2011 - Rajat Arora | … based STK500 Programmer for AVR MCUs (with Atmega8...
29
SUMMER PROJECT May-June, 2011 DEVELOPMENT OF A SELF BALANCING BICYCLE ROBOT BY SUBHOJIT GHOSH AND RAJAT ARORA Y9599 Y9464 Department of Mechanical Engineering Indian Institute of Technology Kanpur UNDER THE GUIDANCE OF: Prof. Bishakh Bhattacharya Department of Mechanical Engineering IIT Kanpur
Transcript of SUMMER PROJECT May-June, 2011 - Rajat Arora | … based STK500 Programmer for AVR MCUs (with Atmega8...

SUMMER PROJECT May-June, 2011
DEVELOPMENT OF A SELF
BALANCING BICYCLE ROBOT
BY
SUBHOJIT GHOSH AND RAJAT ARORA
Y9599 Y9464
Department of Mechanical Engineering
Indian Institute of Technology
Kanpur
UNDER THE GUIDANCE OF:
Prof. Bishakh Bhattacharya
Department of Mechanical Engineering
IIT Kanpur

ABSTRACT
Two wheeled balancing robots are based on inverted pendulum
configurations which rely upon dynamic balancing systems for
balancing and manoeuvring. As the name suggest the robot would
be a bicycle that can move forward or backward, controlled
through a wireless remote, and at the same time autonomously
balancing itself and avoid falling.
Why not just make a 4-wheeled or 3-wheeled robot?
The following are some reasons:
A bicycle uses less track space as compared to any other
vehicle.
It is more flexible and easy to steer as compared to any other
vehicle.
It can cut through obstacles easier than a four wheeled bot.
This technology can be extended to make a self balancing
unicycle which is much better in terms of space and steer
ability.
Due to its low weight and greater steer ability, it can be made
faster than a humanoid robot.
This robot might be useful for transportation in research areas
or mines where man or four wheeled robots cannot reach.
In particular, the focus is on the electro-mechanical mechanisms &
control algorithms required to enable the robot to perceive and act
in real time for a dynamically changing world. The construction of
sensors, filters and actuator system is a learning experience.

INTRODUCTION
Two wheeled balancing robot is a classic engineering problem
based on inverted pendulum and is much like trying to balance a
broom on the tip of your finger. This challenging robotics,
electronics, and controls problem is the basis of our study for this
project.
BALANCING PROCESS: PLAN OF ACTION
The word ‘balance’, here, means that the inverted pendulum is in
equilibrium state, i.e. its position is standing upright at 90 degrees.
However, the system itself is not balanced, which means it keeps
falling off, away from the vertical axis. The same concept is used
here in the form of a Reaction Wheel Pendulum. A flywheel is
attached to an electric motor whose speed can be controlled. Here
we exploit the fact that when the motors apply torque to rotate the
flywheel, they experience a reactionary torque themselves.
Therefore, an accelerometer-gyroscopic inertial measurement
unit is needed to provide the angular position or tilt of the robot
base with respect to the vertical and input it to the microcontroller,
which is programmed with a balancing algorithm. The
microcontroller will provide a type of feedback signal through
Pulse Width Modulation (PWM) control to the MOSFET
reinforced L293 motor driver’s H-Bridge circuit to turn the motor

clockwise or anticlockwise with appropriate speed and
acceleration, based on the Proportional-Integral-Derivative
(PID) control, thus balancing the robot.
The code is written in C software (Code Vision AVR) and
compiled for the Atmel ATMega16 microcontroller through AVR
Studio, the MCU being interfaced with the sensors and motors.
The main goal of the microcontroller is to fuse the wheel encoder,
gyroscope and accelerometer sensors through a method called
Kalman Filtering, to estimate the attitude of the platform and then
to use this information to drive the reaction wheel in the direction
to maintain an upright and balanced position.
The basic idea for a two-wheeled dynamically balancing robot is
pretty simple: move the actuator in a direction to counter the
direction of fall. In practice this requires two feedback sensors: a
tilt or angle sensor to measure the tilt of the robot with respect to
gravity, an accelerometer to calibrate the gyro thus minimizing the
drift. Two terms are used to balance the robot. These are 1) the tilt
angle and 2) its first derivative, the angular velocity. These two
measurements are summed together through Kalman Filtering and
fed back to the actuator which produces the counter torque
required to balance the robot through PID.
Thus the robot can be classified into the following parts:
Mechanical Model
Inertial sensors
Logical processing unit
Actuators (Wireless Drive-Motor and Flywheel Control)
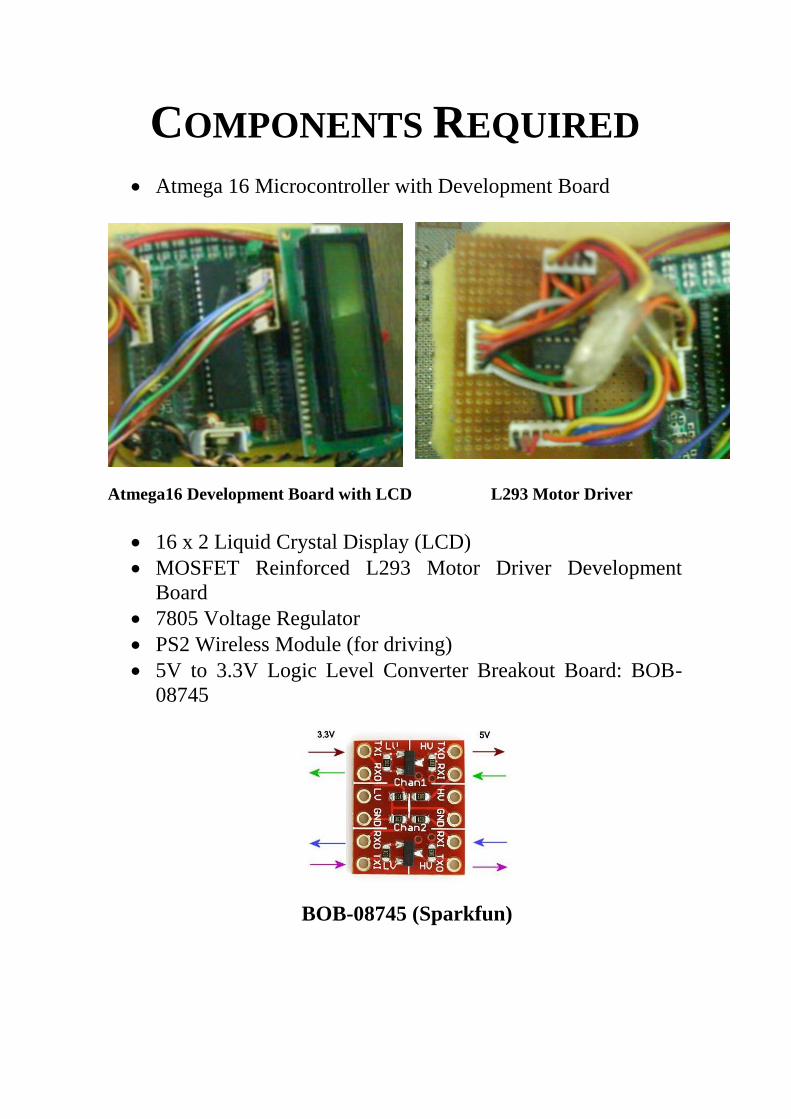
COMPONENTS REQUIRED
Atmega 16 Microcontroller with Development Board
Atmega16 Development Board with LCD L293 Motor Driver
16 x 2 Liquid Crystal Display (LCD)
MOSFET Reinforced L293 Motor Driver Development
Board
7805 Voltage Regulator
PS2 Wireless Module (for driving)
5V to 3.3V Logic Level Converter Breakout Board: BOB-
08745
BOB-08745 (Sparkfun)

USB based STK500 Programmer for AVR MCUs (with
Atmega8 and 74126 ICs)
STK500 Programmer
Connectors and Wires, other tools, Lithium ion batteries.
Aluminium Angles
Mica Sheet
Mechanical Accessories: Couplers, Bushings, Shafts, Pulleys,
Track-belts, Sprockets, Chains
2 Thin Tyres of Diameter 9-12 cm.
Flywheel (Lathed)
High Torque 300 RPM DC Motor operating at 24V(Mech-
Tex)
Low Torque DC Motor for Driving (12V)
Inertial Measurement Unit (IMU) from Sparkfun: 5 Degree
of Freedom Analog Combo Board with Triple Axis
Accelerometer ADXL335 and Dual Axis Gyroscope
IDG500.
5 DOF IMU Combo Board

MECHANICAL MODEL
The whole bicycle is constructed with the help of aluminium
angles and mica sheet. The mica sheet portions allow for drive-
motor mounting and keeping electrical circuitry. The cycle is
low-lying so as to make its centre of mass low.
Flywheel is made of mild steel, and it is sufficiently heavy
enough to provide enough reactionary torque in the high torque
motor attached to the vertical aluminium angles.
Reaction Wheel
The front wheel is free and attached with the help of a threaded
axle and bushings. As the bicycle had to be kept thin, with its
centre of mass low and exactly in the plane of the bicycle, so the
driving motor had to be attached parallel to the axis of the
driven wheel.
The rear wheel is driven by the drive-motor with the help of a
link system. Both chain-sprocket system as well as track belt-
pulley system can be used. These accessories are attached to the
wheel’s axle with the help of couplers.
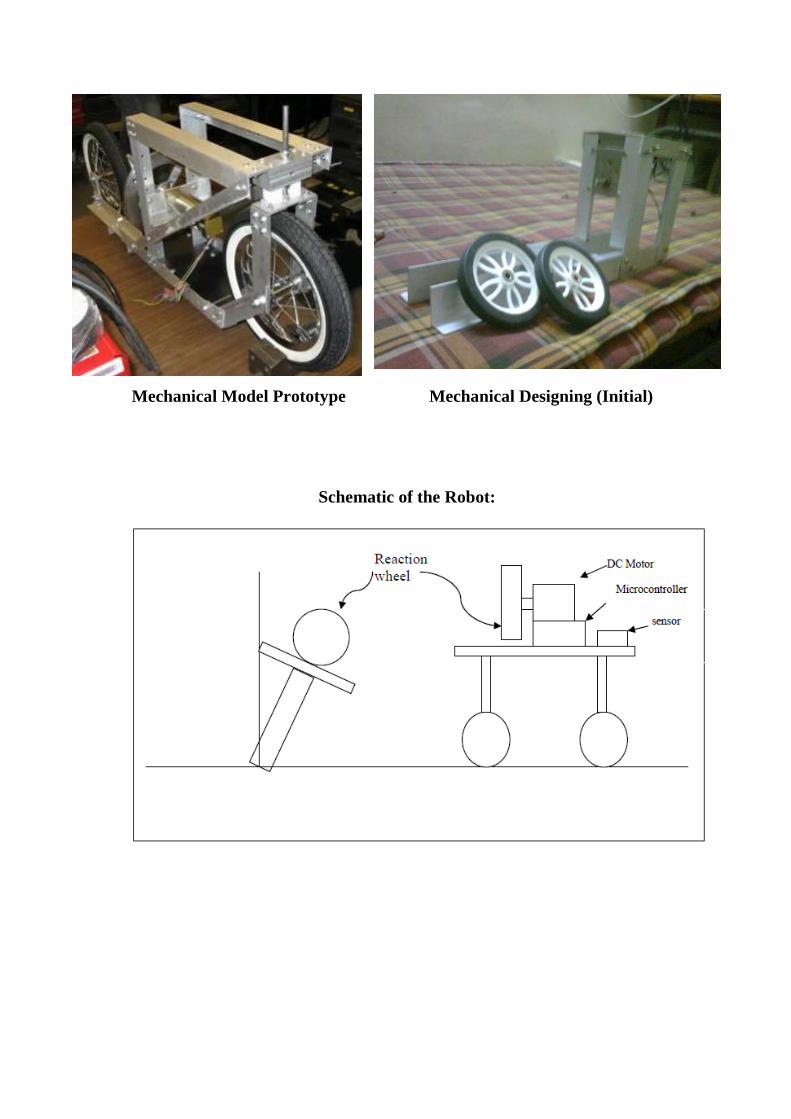
Mechanical Model Prototype Mechanical Designing (Initial)
Schematic of the Robot:

INERTIAL MEASUREMENT
UNIT: TILT SENSOR MODULE
Tilt sensing is the crux of this project and the most difficult part as
well. The inertial sensors used here (in IMU Combo board) are:
Triple Axis Accelerometer ADXL335
Dual Axis Gyroscope IDG500
An accelerometer measures the acceleration in specific directions.
We can measure the direction of gravity w.r.t the accelerometer
and get the tilt angle w.r.t the vertical. It is free from drifts and
other errors. The angle of tilt can be measured from the
acceleration along x-direction as follows:
Ax = g sin θ (θ is the angle w.r.t vertical)
Az = g cos θ (Ax, Az are accelerations in x
and z directions)
For small angles, Ax = g θ
So, θ = K * Ax (K is a constant)
We use this formula since inverse
trigonometric calculations in the MCU may
be time consuming.
The accelerometer outputs an analog voltage Va, and acceleration
can be measured by the formula:
Acceleration = (Va – Vat zero tilt)/Sensitivity (in V/‘g’)
This approach is correct, but only for slow angular velocities, at
high angular velocities the accelerometer tilt angle begins to lag
giving wrong tilt data.

This problem is solved by using a Gyroscope. It would measure
angular velocity and angle can be found by integrating.
The rate gyro measures angular velocity and outputs a voltage Vg:
Vg= ω + f(T) + eg
Where f(T) represents the effect of temperature and eg represents
error, which is not known. So the correct formula is:
Angular Velocity ω = (Vg – Vat zero tilt)/Sensitivity [in V/(deg/s)]
But this approach fails at slow angular velocities due to gyroscopic
drift (small errors in slow velocities integrate and accumulate into
a big error).
In reality, we do not have static conditions, but dynamic
conditions. So in case of dynamic accelerations, the accelerometer
and gyroscope outputs are combined together using the Kalman
Filtering Method. The Kalman filter is a mathematical method
named after Rudolf E. Kalman. Its purpose is to use measurements
that are observed over time that contain noise (random variations)
and other inaccuracies, and produce values that tend to be closer to
the true values of the measurements and their associated calculated
values.
Ax = g sin θ - δvx/δt
θ = K * (Ax + rώ) (For small θ, ώt is angular acceleration)
For calculating the integrals and derivatives, PID algorithm is:
Calculation of θt by integration; (suffix t stands for time t)
θt = θt-1 + ω*δt
Calculation of ώt by differentiation;
ώt = ( ωt – ωt-1)/ δt

The code for Kalman Filtering is as follows:
static const double dt = 0.032;
static double P[2][2] = {{ 1, 0 },{ 0, 1 }};
double angle;
double q_bias;
double rate;
static const double R_angle = 0.300;
static const double Q_angle = 0.001;
static const double Q_gyro = 0.003;
void state_update(const double q)
{
double Pdot[2][2];
Pdot[0] [0] = Q_angle - P[0][1] - P[1][0]; /* 0,0 */
Pdot[0] [1] = - P[1][1]; /* 0,1 */
Pdot[1] [0] = - P[1][1]; /* 1,0 */
Pdot[0] [0] = Q_gyro; /* 1,1 */
/* Stores our unbiased gyro estimate */
rate = q;
angle += q * dt;
P[0][0] += Pdot[0] [0]* dt;
P[0][1] += Pdot[0] [1]* dt;
P[1][0] += Pdot[1] [0]* dt;
P[1][1] += Pdot[1] [1]* dt;
}
void kalman_update(double angle_m)
{
double angle_err;
double C_0 = 1;
double PCt_0, PCt_1;
double E, K_0, K_1, t_0, t_1;

angle_err = angle_m - angle;
PCt_0 = C_0 * P[0][0]; /* + C_1 * P[0][1] = 0 */
PCt_1 = C_0 * P[1][0]; /* + C_1 * P[1][1] = 0 */
E = R_angle + C_0 * PCt_0;
K_0 = PCt_0 / E;
K_1 = PCt_1 / E;
t_0 = PCt_0; /* C_0 * P[0][0] + C_1 * P[1][0] */
t_1 = C_0 * P[0][1]; /* + C_1 * P[1][1] = 0 */
P[0][0] -= K_0 * t_0;
P[0][1] -= K_0 * t_1;
P[1][0] -= K_1 * t_0;
P[1][1] -= K_1 * t_1;
Angle += K_0 * angle_err;
q_bias += K_1 * angle_err;
}
void main(void)
{
int x, y, z, dv, ocr, w, anglef=0;
float g,angle2=0,diff=0,integral=0,k;
long zx;
char a[10];// Declare your local variables here
while (1)
{
x=read_adc(3)-330;
y=read_adc(2)-330;
z=read_adc(1)-330;
w=(285-read_adc(0));
zx=z*sqrt(x*x/z/z+1.0);
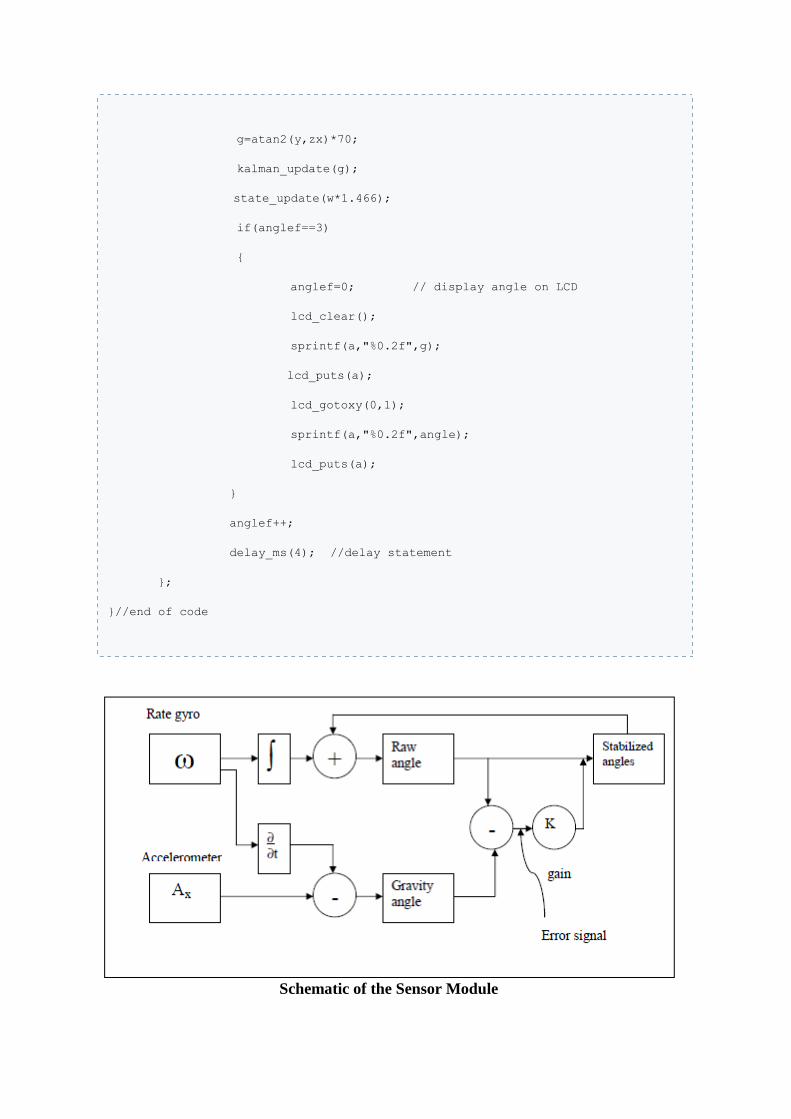
g=atan2(y,zx)*70;
kalman_update(g);
state_update(w*1.466);
if(anglef==3)
{
anglef=0; // display angle on LCD
lcd_clear();
sprintf(a,"%0.2f",g);
lcd_puts(a);
lcd_gotoxy(0,1);
sprintf(a,"%0.2f",angle);
lcd_puts(a);
}
anglef++;
delay_ms(4); //delay statement
};
}//end of code
Schematic of the Sensor Module

LOGICAL PROCESSING UNIT
The processing unit used is Atmel ATMega16 microcontroller unit
which is a versatile EEPROM. It has four I/O (Input/Output) ports,
onboard ADC (Analog to Digital Converter) and PWM (Pulse
Width Modulation) outputs for motor control. It can be
programmed easily with minimum hardware requirements which
make it extremely popular in robotics applications. Here it
performs the following functions:
ADC conversion of outputs of Rate Gyro and Accelerometer
Processing the input signals
Periodic recalibration of gyro
Display of angle & other data.
Control of actuator unit
Schematic of the processing unit is as shown:

Circuit Diagram:

ALGORITHM:
The algorithm for the controller is as follows:
Step1: Initialize the values of rate gyro bias and accelerometer bias
for zero value of θ & ω.
Step2: Measure the value of voltage of gyro and accelerometer
outputs and store those values as ω and Ax.
Step3: Integrate the rate gyro reading by: θt = θt-1 + ω*δt
Differentiate the rate gyro reading by: ώt = (ωt – ωt-1)/ δt
δt in each case is assumed to be constant and is equal to the
cycle time.
Step4: Calculate the raw angle and gravity angle and compute the
error value.
Step5: Update the raw angle by:
θstabilized = θraw angle + constant* (θgravity angle – θraw angle)
Constant is taken as 0.2
Step6: We calculate the torque required to restore balance:
τ = constant * sin θ (or τ = constant * θ for small angles)
Step7: We obtain the direction of rotation of the reaction wheel:
If θ < 0, counter-clockwise
If θ > 0, clockwise
Step8: Send the output to the DC motor attached to the reaction
wheel.
Step9: Repeat steps (2-8)
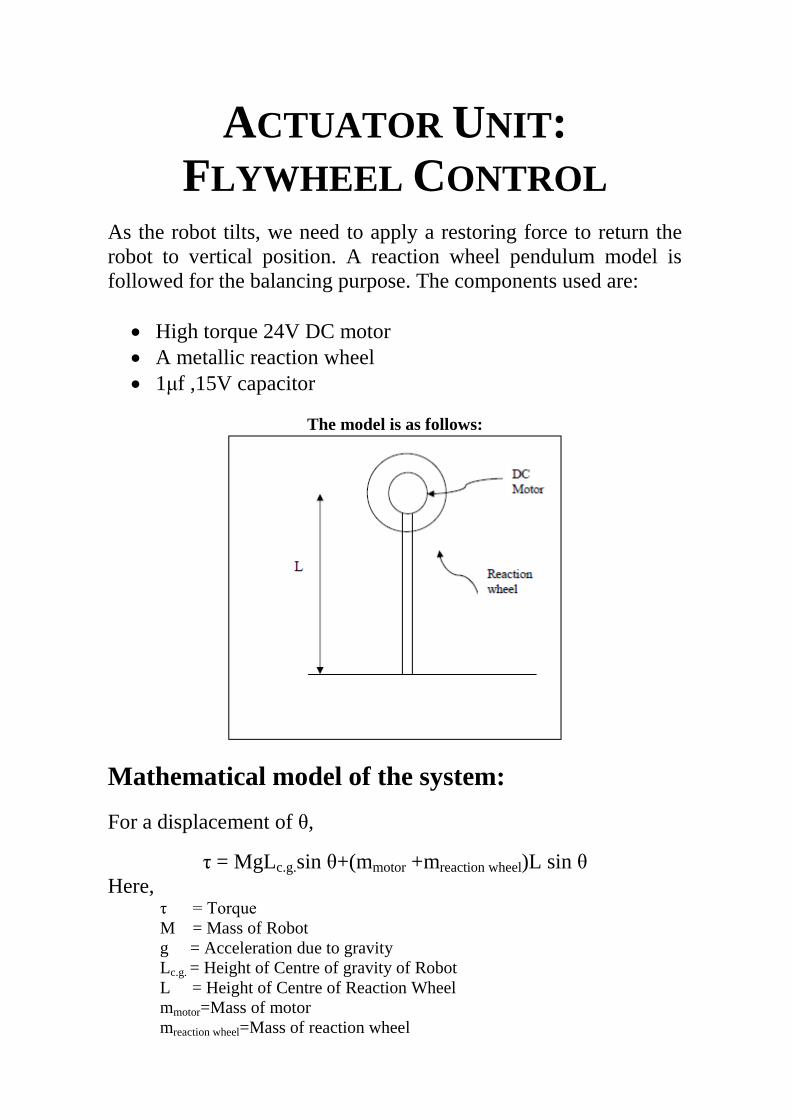
ACTUATOR UNIT:
FLYWHEEL CONTROL
As the robot tilts, we need to apply a restoring force to return the
robot to vertical position. A reaction wheel pendulum model is
followed for the balancing purpose. The components used are:
High torque 24V DC motor
A metallic reaction wheel
1μf ,15V capacitor
The model is as follows:
Mathematical model of the system:
For a displacement of θ,
τ = MgLc.g.sin θ+(mmotor +mreaction wheel)L sin θ
Here, τ = Torque
M = Mass of Robot
g = Acceleration due to gravity
Lc.g. = Height of Centre of gravity of Robot
L = Height of Centre of Reaction Wheel
mmotor=Mass of motor
mreaction wheel=Mass of reaction wheel
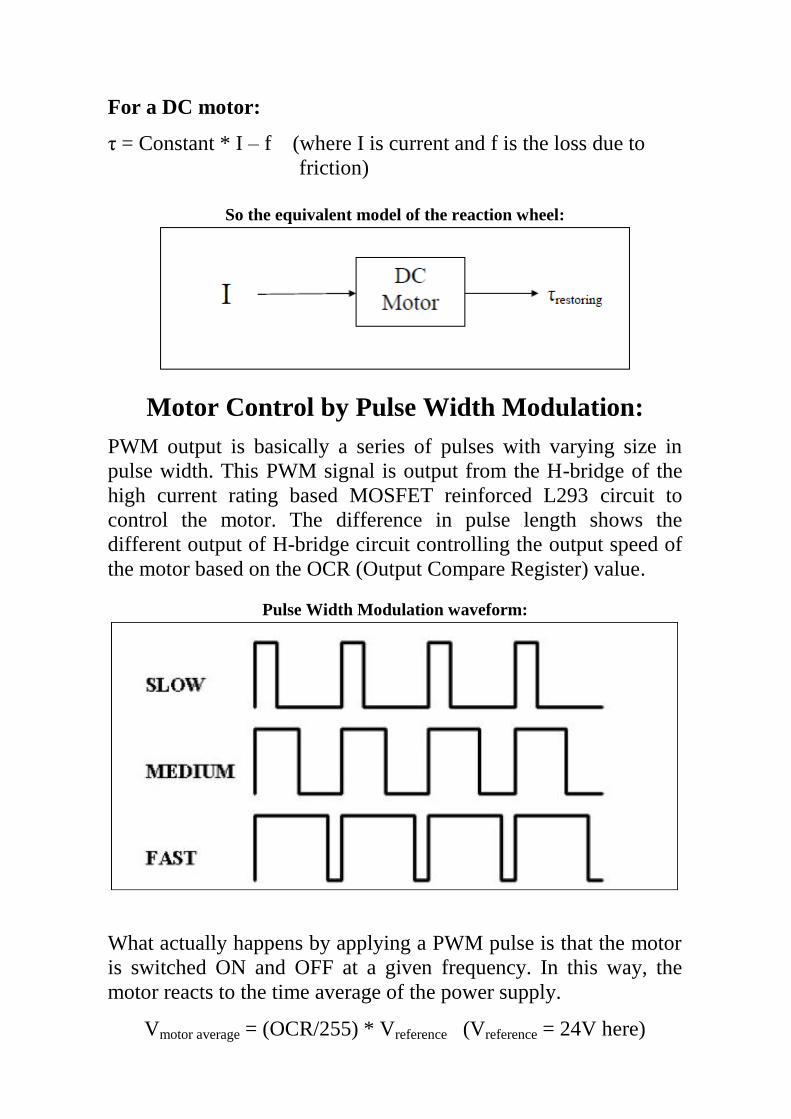
For a DC motor:
τ = Constant * I – f (where I is current and f is the loss due to
friction)
So the equivalent model of the reaction wheel:
Motor Control by Pulse Width Modulation:
PWM output is basically a series of pulses with varying size in
pulse width. This PWM signal is output from the H-bridge of the
high current rating based MOSFET reinforced L293 circuit to
control the motor. The difference in pulse length shows the
different output of H-bridge circuit controlling the output speed of
the motor based on the OCR (Output Compare Register) value.
Pulse Width Modulation waveform:
What actually happens by applying a PWM pulse is that the motor
is switched ON and OFF at a given frequency. In this way, the
motor reacts to the time average of the power supply.
Vmotor average = (OCR/255) * Vreference (Vreference = 24V here)

The capacitor connected across the motor charges and discharges
during the on and off time respectively, thus behaving like an
integrator. The torque generated by the motor is a function of the
average value of current supplied to it.
It seems to be obvious that once we have angle we can rotate the
flywheel with acceleration proportional to it, but that won't do the
job. If that is done what actually will happen is that when there is a
tilt the bike will cross the mean position and reach the other side
till the same tilt angle. To fix this we need some kind of algorithm
that can damp this periodic motion and make it stable at the mean
position after some time. This is where PID (Proportional,
Integral, Derivative) Controller comes to use.
PID Control of Flywheel:
The proportional term makes a change to the output that is
proportional to the current error value. The proportional response
can be adjusted by multiplying the error by a constant Kp, called
the proportional gain. The contribution from the integral term is
proportional to both the magnitude of the error and the duration of
the error. The integral in a PID controller is the sum of the
instantaneous error over time and gives the accumulated offset that
should have been corrected previously. The accumulated error is
then multiplied by the integral gain (Ki) and added to the controller
output. The derivative of the process error is calculated by
determining the slope of the error over time and multiplying this
rate of change by the derivative gain Kd.
The proportional, integral, and derivative terms are summed to
calculate the output of the PID controller. Defining u(t) as the
controller output, the final form of the PID algorithm is:

where: Pout: Proportional term of output
Kp: Proportional gain, a tuning parameter
Ki: Integral gain, a tuning parameter
Kd: Derivative gain, a tuning parameter
e: Error
t: Time or instantaneous time (the present)
We tune the PID controller by varying the constants Kp, Kd and Ki
and optimising them by any well known method (like the Ziegler
Nichol’s Method).
Process Variable (PV) vs time:
So, we use the PID method to control the flywheel for balancing.
The PID Code is as follows:
(The following code is inside the continuous while loop)
dv = kp * angle + ki * integral + kd * diff;
integral += angle;
diff = angle – previous_angle;
previous_angle = angle;
OC1A += dv; //OCR Value changed
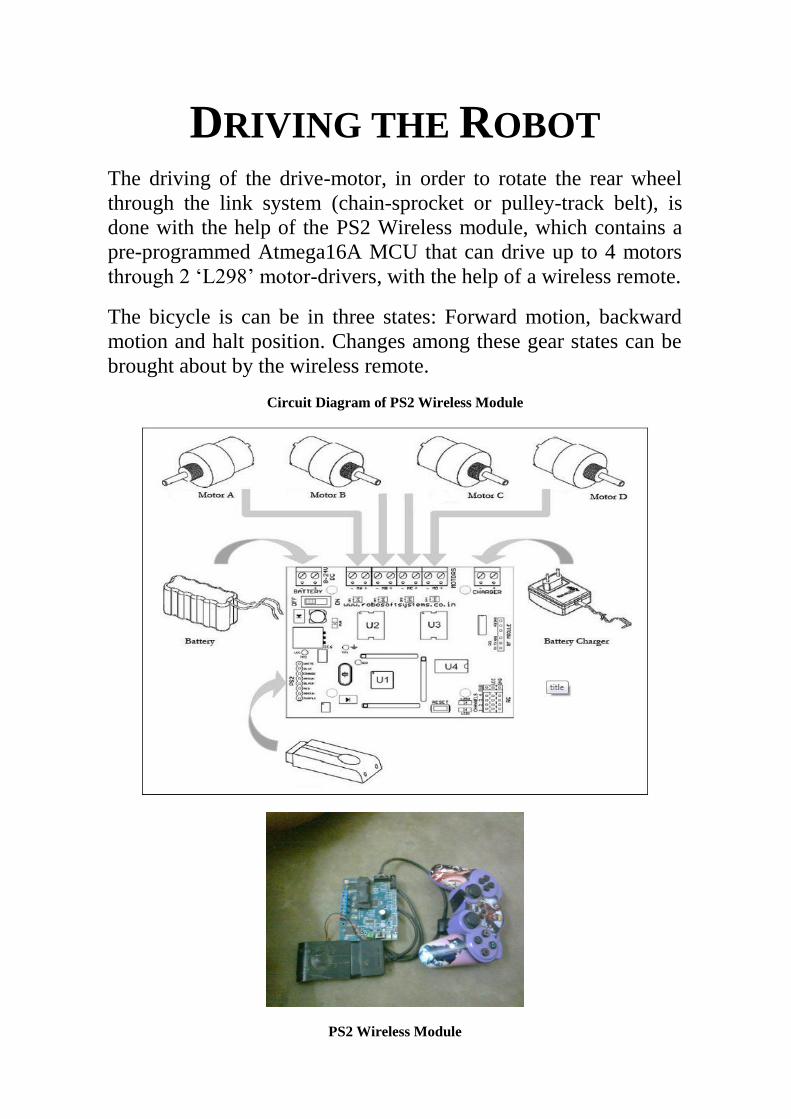
DRIVING THE ROBOT
The driving of the drive-motor, in order to rotate the rear wheel
through the link system (chain-sprocket or pulley-track belt), is
done with the help of the PS2 Wireless module, which contains a
pre-programmed Atmega16A MCU that can drive up to 4 motors
through 2 ‘L298’ motor-drivers, with the help of a wireless remote.
The bicycle is can be in three states: Forward motion, backward
motion and halt position. Changes among these gear states can be
brought about by the wireless remote.
Circuit Diagram of PS2 Wireless Module
PS2 Wireless Module

PRESENT PHOTOS AND VIDEO LINK
COMPLETED ROBOT:
CIRCUITRY:
TEST RUN VIDEO LINK: http://www.youtube.com/watch?v=dNSuuoPgBpU

FUTURE IMPROVEMENTS
In future, the bicycle could be made to move not only forward and
backward, but also steer sideways.
The PS2 Wireless Module has slots for four motors, and can be
made to control a servo motor which could be used to introduce the
steering functionality on to the front wheel.
The balancing can be made much more precise by introducing a
rotating disc whose gyroscopic precession could be used for more
accurate balancing.
In addition, fuzzy logic controller can also be implemented to
provide flexibility and accuracy in control.

ACKNOWLEDGEMENT
We would like to express our deep sense of gratitude and respect to
our supervisor Prof. Bishakh Bhattacharya, for his guidance,
suggestions and support. We consider ourselves extremely lucky to
be able to work under his guidance. We would also like to thank
our friends who have helped us a lot.
SUBHOJIT GHOSH AND RAJAT ARORA
Y9599 Y9464
Department of Mechanical Engineering
Indian Institute of Technology
Kanpur
See Code Next Page...

Code:
/*****************************************************
This program was produced by the
CodeWizardAVR V1.24.6 Standard
Automatic Program Generator
© Copyright 1998-2005 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
e-mail:[email protected]
Project :
Version :
Date : 27-10-2011
Author : Subhojit
Company : IITK
Comments:
Chip type : ATmega16
Program type : Application
Clock frequency : 8.000000 MHz
Memory model : Small
External SRAM size : 0
Data Stack size : 256
*****************************************************/
#include <mega16.h>
#include <delay.h>
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
// Alphanumeric LCD Module functions
#asm
.equ __lcd_port=0x15 ;PORTC
#endasm
#include <lcd.h>
#define ADC_VREF_TYPE 0x00
// Read the AD conversion result
unsigned int read_adc(unsigned char adc_input)
{
ADMUX=adc_input|ADC_VREF_TYPE;
// Start the AD conversion
ADCSRA|=0x40;
// Wait for the AD conversion to complete
while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10;

return ADCW;
}
// Declare your global variables here
int accx,accy,accz,ratey,ratex,omegax,oc0;
int accx0,accy0,accz0,ratey0,ratex0;
char ch[10];
float theta,theta2,angle,prev_angle,diff,integral,dv;
float kp,kd,ki;
void main(void)
{
// Declare your local variables here
kp=1.5;
kd=6.0;
ki=0.000000;
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=Out Func2=Out Func1=Out
Func0=Out
// State7=T State6=T State5=T State4=T State3=0 State2=0 State1=0 State0=0
PORTB=0x00;
DDRB=0x0F;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=Out Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=0 State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0x40;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: 8000.000 kHz
// Mode: Fast PWM top=FFh
// OC0 output: Non-Inverted PWM

TCCR0=0x69;
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer 1 Stopped
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer 2 Stopped
// Mode: Normal top=FFh
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=0x00;
MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;

SFIOR=0x00;
// ADC initialization
// ADC Clock frequency: 125.000 kHz
// ADC Voltage Reference: AREF pin
// ADC Auto Trigger Source: None
ADMUX=ADC_VREF_TYPE;
ADCSRA=0x86;
// LCD module initialization
lcd_init(16);
delay_ms(1000);
accx0=read_adc(0);
accy0=read_adc(1);
accz0=read_adc(2);
ratex0=read_adc(3);
ratey0=read_adc(4);
lcd_gotoxy(0,0); itoa(accx0,ch); lcd_putsf("X="); lcd_gotoxy(2,0); lcd_puts(ch);
lcd_gotoxy(6,0); itoa(accy0,ch); lcd_putsf("Y"); lcd_gotoxy(7,0); lcd_puts(ch);
lcd_gotoxy(11,0); itoa(accz0,ch); lcd_putsf("Z="); lcd_gotoxy(13,0); lcd_puts(ch);
lcd_gotoxy(2,1); itoa(ratex0,ch); lcd_putsf("Rx="); lcd_gotoxy(5,1); lcd_puts(ch);
lcd_gotoxy(9,1); itoa(ratey0,ch); lcd_putsf("Ry="); lcd_gotoxy(12,1); lcd_puts(ch);
delay_ms(5000);
lcd_clear(); lcd_gotoxy(0,0); lcd_putsf("START"); delay_ms(1000); lcd_clear();
while (1)
{
// Place your code here
lcd_clear();
accx=read_adc(0);
accy=read_adc(1);
accz=read_adc(2);
ratex=read_adc(3);
ratey=read_adc(4);
theta=(float)(atan((float)((float)(accy-accy0)/(float)(accz-accy0))))*180.0/(22.0/7.0);
lcd_gotoxy(0,0); ftoa(theta,2,ch); lcd_puts(ch);
omegax=ratex0-ratex;
theta2 = theta2+omegax*2.55*0.032;
theta2=0.9*theta2+0.1*theta;
lcd_gotoxy(0,1); ftoa(theta2,2,ch); lcd_puts(ch);
angle=theta2;
dv=kp*angle+ki*integral+kd*diff;

integral+=angle;
diff=-angle+prev_angle;
prev_angle=angle;
oc0=(int)dv;
if(oc0>=0)
{
if(oc0>255){oc0=255;}
OCR0=(int)oc0;
PORTB.0=0;PORTB.1=1;
}
else
{
if(oc0<-255){oc0=-255;}
OCR0=(int)(-oc0);
PORTB.0=1;PORTB.1=0;
}
lcd_gotoxy(9,1); lcd_putsf("OCR="); lcd_gotoxy(13,1); itoa(OCR0,ch); lcd_puts(ch);
delay_ms(10);
};
}
------------------------------------------------------------------------------------------------------------


















