
Strain and acceleration measurement and analysis for ... - MSC User Conf - Seat... · Strain and...
14
2012/10/18 1 Strain and acceleration measurement and analysis for vehicle damper selection and rigid body response reconstruction Dr. Michiel Heyns Pr.Eng. T: +27 12 664-7604 C: +27 82 445-0510 [email protected] Introduction • Objective: – To reduce weighted root-mean-square seat response of the driver and crew seats to specified limit: • Limited time - only 1 month • Limited resources – only four measurement opportunities on the Gerotek test track • Could only change damping of the vehicle suspension – only 3 days for this phase • Needed an approach using – Analytical modelling – optimize damper characteristics – Experimental response measurements – Laboratory testing and seat characteristic refinement 2
Transcript of Strain and acceleration measurement and analysis for ... - MSC User Conf - Seat... · Strain and...

2012/10/18
1
Strain and acceleration measurement and analysis for vehicle damper selection and
rigid body response reconstruction
Dr. Michiel Heyns Pr.Eng.T: +27 12 664-7604
C: +27 82 445-0510
Introduction
• Objective:– To reduce weighted root-mean-square seat response of
the driver and crew seats to specified limit:• Limited time - only 1 month• Limited resources – only four measurement opportunities on the
Gerotek test track• Could only change damping of the vehicle suspension – only 3
days for this phase
• Needed an approach using– Analytical modelling – optimize damper characteristics– Experimental response measurements– Laboratory testing and seat characteristic refinement
2
2012/10/18
2
Method
3
Best damping
• Non-linear time and state dependant transient equations – solve by fixed step Fourth Order Runge-Kutta
• Response simulation with pseudo-random theoretical road profile• Measure vehicle responses• System ID and road profile reconstruction• Verify road profile accuracy by calculating responses and compare• Damping factor sensitivity analysis – optimal damping factor• Verify on the test track
Seat weighted RMS
• Select test track• Seat and seat mount response measurements• Test rig assembly• Reconstruct seat mount vibration in the laboratory• Iterative testing and seat modification to obtain required seat Weighted RMS
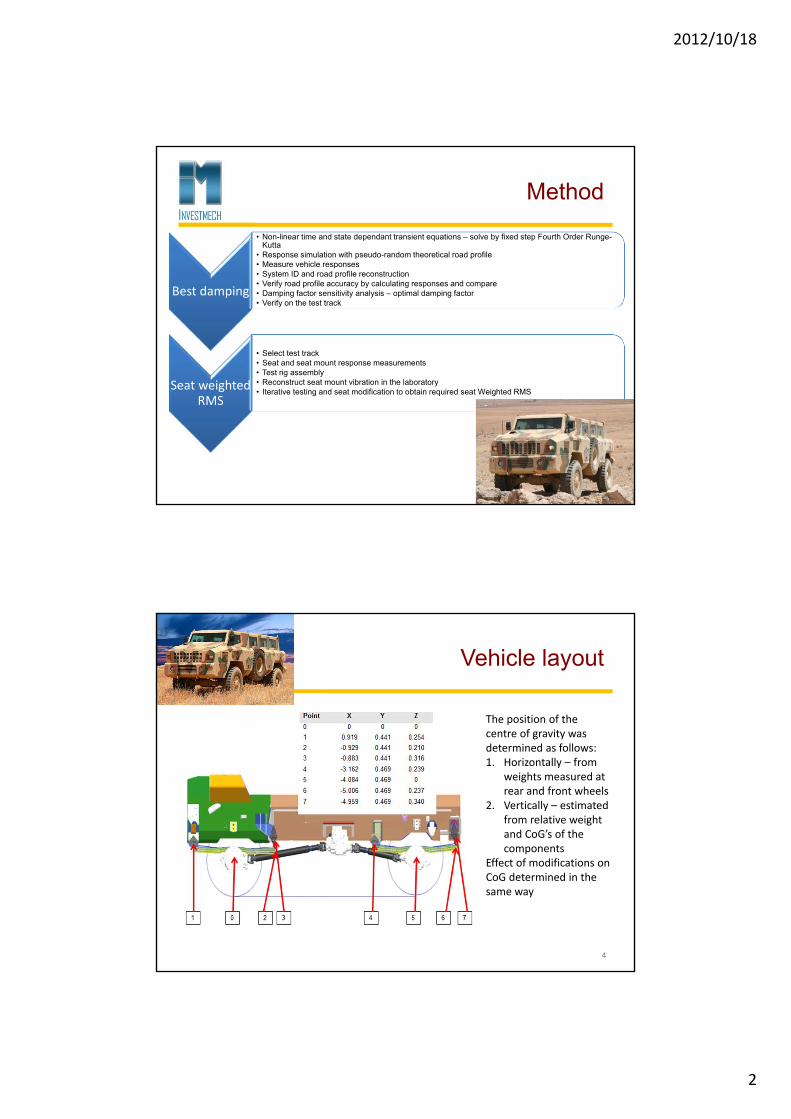
Vehicle layout
4
The position of the centre of gravity was determined as follows:1. Horizontally – from
weights measured at rear and front wheels
2. Vertically – estimated from relative weight and CoG’s of the components
Effect of modifications on CoG determined in the same way

2012/10/18
3
Tyre model
5
1 1.5 2 2.5 3 3.5 4 4.5 50.7
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
Displacement (mm)
Spr
ing
stiff
ness
(M
N/m
)
350 kPa 30 kN load
350 kPa 40 kN load600 kPa 30 kN load
600 kPa 40 kN load
No data at 2
This bump occursat both pressuresand 40 kN load
Used stiffness and damping coefficient10% damping factor was assumedMeasured data was usedLinear stiffness coefficient and linear damping coefficient was assumedEffect of stiction during characterization was assumed negligible
Note, in this case tyre stiffness >> suspension stiffness
Non-linear time and state dependant modelling
6
∑
, ,
∑
, ,
∑

2012/10/18
4
Axle mathematical model
7
xy
z
∑ , ,
∑
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
0 0.2 0.4 0.6 0.8 1 1.2
Fo
rce[
N]
Velocity [m/s]
Force vs. velocity
Tension
Compression
Damper model
• Rebound/Compression force ratio = typically 1 to 3– R/C ration = 1 typical for off-road
– R/C ration = 3 typical for sport sedan vehicles
– In this case 2.33
8
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
0 0.2 0.4 0.6 0.8 1 1.2
Fo
rce[
N]
Velocity [m/s]
Force vs. velocity
Tension
Compression

2012/10/18
5
Reference damping factor
• Use average of compression and rebound
• Damping factor for the reference vehicle 0.27
9
18500
2 360000133004
0.27
Question: What is a typical damping factor for off-road vehicles?Answer:Trade-off between ride comfort, road holding and road handling, you must compromise, cannot have allLow value at High Speed and High value at Low speedNeed more as road roughness increaseRace cars need good handling: 0.65 0.75Passenger cars maximized for ride comfort:
0.250 0.5 1 1.5 2 2.5 3
0
2
4
6
8
10
12
Frequency ratio
Tra
nsm
issi
bilit
y
= 0.05
= 0.25
= 0.60
= 0.80
Strain gauges & accelerometers
10
Instrumentation to record acceleration input and response of crew seat
Strain gauges to measure suspension force

2012/10/18
6
Hardware used
• Accelerometers– Type: VibraSense ICP Accelerometer Model 101 and 103.
– Calibration certificate:
11
Hardware used
• Strain gauges– Type: K-LY41-6/350 350 Ω Linear strain gauge
– Epoxy: X 60 Superglue
– Bridge configuration: Quarter-bridge
12

2012/10/18
7
Hardware used
• Data Logger:– Description: Somat eDaq-Lite
– Sampling frequency = 2,000 Hz
– Anti-aliasing: • Linear Phase
• Cut-off frequency = 667 Hz
• Output data type: 32 Bit Float
13
ARX modelling
• ARX = AutoRegresive model with eXternal input
• Part of PCMatlab System Identification toolbox– Model Characterization: th=arx([Response Input],NN)
• Mathematics: 1 2 ⋯1 ⋯ 1
• The function solves the & coefficients
• is external noise
– Simulation: Response=idsim(Input,th)
14

2012/10/18
8
MIMO-System ID with random road profile
150 0.5 1 1.5 2 2.5
x 104
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
Correlation coefficient = 0.87
Reconstructed road input
Point
Dis
plac
emen
t [m
]
Blue - from transient analysis
Red - reconstructed
8060 8080 8100 8120 8140 8160 8180 8200 8220-0.04
-0.03
-0.02
-0.01
0
0.01
0.02Reconstructed road input
Point
Dis
plac
emen
t [m
]
Blue - from transient analysis
Red - reconstructed
ARX forward system identification was used: th= arx([y_temp u_id],NN);Check accuracy by reconstructing acceleration responses used: y_id=idsim(u_id,th);
The mode order was , , 1,1,0Reverse-inverse ARX model to reconstruct road input Correlation coefficient = 0.87
Only a slight shift in mean of signal required to give good perception of fit
Road profile reconstructed from recorded accelerations
160 1 2 3 4 5 6
x 104
-0.06
-0.04
-0.02
0
0.02
0.04
0.06Reconstructed road input from measured accelerations
Point
Dis
plac
emen
t [m
]
0 1 2 3 4 5 6
x 104
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15Reconstructed road input from measured accelerations
Point
Dis
plac
emen
t [m
]
Measured acceleration used to calculate road profiles: y_idRIm=idsim(u_idRIm,thRI);The function does not use time step or sampling frequency – time step in reconstructed data = time step of response data used, 200 Hz in this case
Calculated road profile Measured

2012/10/18
9
Simulations to Weighted RMS
• Use road profile to calculate responses
• ISO 2631 running weighted RMS
• Repeat for damping magnification factor varied from 0.2 to 2.4 in steps of 0.2– That is the compression and rebound damper
characteristics were multiplied with this factor
– This will indicate in which direction to adjust the dampers
17
Tips that enabled 55 simulations of 120s each in 15 hour span on ONE Dell Notebook Computer:• Read data into memory and limit disk operations to the minimum• Ensure that all computer threads are used – split algorithms if necessary• Declare result matrix sizes before starting the simulation• Limit array values used in interpolations to find instantaneous road profile displacement
and velocity
Damping factor sensitivity
18
0 0.5 1 1.5 2 2.53.4
3.6
3.8
4
4.2
4.4
4.6
4.8
5Max. wrms for Road 2
Damper modification factor
Obj
ectiv
e fu
nctio
n
Results indicated an increase of 60% (factor 1.6) on damping factorDamping factor was changed to 1.6 x 0.27 = 0.43 (43%)
Response optimal point

2012/10/18
10
Test rig
19
Designed to give mounting points exactly as in the vehicle No natural modes in the operating
frequency range
40 kN servo-hydraulic actuator excites the
super structure
Objective – reconstruct measured seat frame acceleration
20
Instrumentation to verify drive signal
0 20 40 60 80 100 120-10
-8
-6
-4
-2
0
2
4
6
8
10
Time [s]
Acc
eler
atio
n [m
/s2 ]
Acceleration in the Time domain
This is the measured acceleration, that is also the desired response of the seat frame on the servo-hydraulic actuator

2012/10/18
11
Why High-pass filter – Sine wave?
21
0 1 2 3 4 5 6 7 8 9 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2Sine wave
Time [s]
Acc
eler
atio
n [m
/s]
0 1 2 3 4 5 6 7 8 9 10-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7Sine wave
Time [s]
Vel
ocity
[m
/s]
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
3.5Sine wave
Times [s]
Dis
plac
emen
t [m
]
0 1 2 3 4 5 6 7 8 9 10-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7Sine wave
Time [s]
Vel
ocity
[m
/s]
=
=
Note the non-zero mean
20.318
Non-zero mean causes the trend
Solution: High-pass filter signals
Servo-hydraulic actuator in displacement control →
High-pass filter effect on random signals after integration
22
0 1 2 3 4 5 6 7 8 9 10-4
-3
-2
-1
0
1
2
3
4Random wave
Time [s]
Acc
eler
atio
n [m
/s]
0 1 2 3 4 5 6 7 8 9 10-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15Random wave
Time [s]
Vel
ocity
[m
/s]
0 1 2 3 4 5 6 7 8 9 10-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1Random wave
Times [s]
Dis
plac
emen
t [m
]
0 1 2 3 4 5 6 7 8 9 10-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04Random wave - High-pass filtered
Time [s]
Vel
ocity
[m
/s]
0 1 2 3 4 5 6 7 8 9 10-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5x 10
-3 Random wave - High-pass filtered
Times [s]
Dis
plac
emen
t [m
]
d1x = filtfilt(B,A,(cumtrapz(t,d2x)));
x=filtfilt(B,A,cumtrapz(t,d1x));
d1x = cumtrapz(t,d2x);
x=cumtrapz(t,d1x);
Fs=200;HPFCutoff=1;
[B,A]=butter(8,HPFCutoff/(Fs/2),'high');
UNFILTERED FILTERED
It is essential to remove the low-frequency “drifts” from the
integrated signals

2012/10/18
12
Test rig drive signal
230 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frequency [Hz]
Am
plitu
de [
m/s
2-R
MS
]
Spectrum of recorded acceleration
Measured Acc. Spectrum RMS = 2.04
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frequency [Hz]
Am
plitu
de [
m/s
2 -RM
S]
FREQUENCY SPECTRUM FOR MEASURED ACC. SIGNAL VS. COMPENSATED ACC. SIGNAL
Measured Acc. Spectrum RMS = 2.04 Compensated Acc. Spectrum RMS = 2.65
Blue - Measured Acc.
Red - Compensated Acc.
0 20 40 60 80 100 120 140-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
Time [s]
Dis
plac
em
ent
[m]
Dsplacement in the Time domain
0 20 40 60 80 100 120 140-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Time [s]
Dis
pla
cem
ent
[m]
Dsplacement in the Time domain
Red - Compensated Displacement
Blue - Recorded Displacement
Test rig (DAC – Hydraulics – Servo-valve – Inertias – AAF – ADC):• Non-linear frequency dependant responses
• Natural frequencies• Inertia in the oil supply system, etc.
• Therefore, • Solution:
• Compensate in the time or frequency domains• In this case, frequency domain is sufficient
Measured acceleration spectrum = Desired response
Drive signal
How was this done
24
0 20 40 60 80 100 120 140-15
-10
-5
0
5
10
15
Time [s]
Acc
eler
atio
n [m
/s2 ]
Acceleration in the Time domain
Blue - Recorded Acc.
Red - Compensated Acc.
Measure rig Response
Iterate until: 90%
The result is an acceleration drive signal adjusted for the rig
frequency response

2012/10/18
13
Reconstructed frame response
250 5 10 15 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Marlin Spectrum RMS = 2.04
Rig Spectrum RMS = 2.05
X: 2.197Y: 0.7608
Frequency [Hz]
Am
plitu
de [
m/s
2 -RM
S]
FREQUENCY SPECTRUM RMS OF THE MARLIN VS. RIG
X: 6.348Y: 0.4391
Blue - Marlin
Red - RigMeasured RMS = 2.04
Rig RMS = 2.05
The objective is to have accurate reconstruction of the dominant peaks in the spectrum
Motion sickness: 0.1 – 0.5 HzHealth, comfort, perception: 0.5 Hz – 80 Hz
5 10 15 20 25 300
0.5
1
1.5
2
2.5
3Transmissibility function driver seat responce/vehicle
Frequency [Hz]
FR
F A
mpl
itude
0 0.5 1 1.5 2 2.5 30
1
2
3
4
5
6
X: 0.991Y: 5.123
X: 0.929Y: 1.995
X: 1.414Y: 1
Frequency ratio
Tra
nsm
issi
bilit
y m
agni
tude
Effect of damping on magnitude at resonance
= 0.1
= 0.3
Driver Seat32 km/h Rally Track Full
Load
Transmissibility more than 1 at f < 6 HzSeat resonatesSolution: Increase damping
5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6Spectrum RMS = 1.54
X: 1.587Y: 0.5959
Frequency [Hz]
Am
plitu
de [
m/s
2 -RM
S]
Spectrum of Driver Seat Response acceleration
5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
Spectrum RMS = 1.88
X: 1.709Y: 0.3531
Frequency [Hz]
Am
plitu
de [
m/s
2 -RM
S]
Spectrum of Driver Seat Input
250 250.5 251 251.5 252 252.5 253 253.5 254 254.5
-8
-6
-4
-2
0
2
4
6
8
10
12
Time [s]
Acc
eler
atio
n [m
/s2 ]
Paramount Run3: 32km/h Rally track (Full L)
Blue - Seat Input
Red - Seat Response
This seat filters high frequency content

2012/10/18
14
0 5 10 15 20 25
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
Transmissibility function crew seat responce/vehicle
Frequency [Hz]
FR
F A
mpl
itude
Crew Seat32 km/h Rally Track Full
Load
Seat response is in phase with vehicleSeat is stiff due to mounting strapsSolution: Replace straps with elastic material
250 250.5 251 251.5 252 252.5 253 253.5 254 254.5 255
-6
-4
-2
0
2
4
6
Time [s]
Acc
eler
atio
n [m
/s2 ]
Paramount Run3: 32km/h Rally track (Full Load)
Blue - Seat Input
Red - Seat Response
5 10 15 20 25 300
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Spectrum RMS = 0.90
Frequency [Hz]
Am
plitu
de [
m/s
2 -RM
S]
Spectrum of Crew Seat Response acceleration
X: 1.343Y: 0.2884
5 10 15 20 25 300
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Spectrum RMS = 0.97
Frequency [Hz]
Am
plitu
de [
m/s
2 -RM
S]
Spectrum of Crew Seat Input X: 1.465Y: 0.4281
Note how this seat acceleration follows that of the vehicle body over the frequency spectrum
of the time signal
Final remarks
• Servo-hydraulic test rig now used to minimise transmissibility to the seat– Adding elasticity to isolate– Seat layout design changes
• This process major contribution– Enable quick (3 Days) for damper selection for minimum
seat weighted RMS response– Test rig that enables continuous, cheap, repeatable,
reliable reconstruction of vehicle responses at the seat mounts
– Laboratory verification of seat designs to meet client objectives
28


















