Stepper motors
25
Made by:- Manish Bhagat
-
Upload
manishviyahut -
Category
Engineering
-
view
835 -
download
5
Transcript of Stepper motors
Made by:-
Manish Bhagat
CONTENTS
• What Is a Stepper Motor?• Construction • Working Of Stepper Motor?• The 3 Types Of Motors?• 1. Variable Reluctance Stepper• 2. Permanent Magnet Stepper• 3. Hybrid Synchronous Stepper• Phase Current Waveforms• Applications
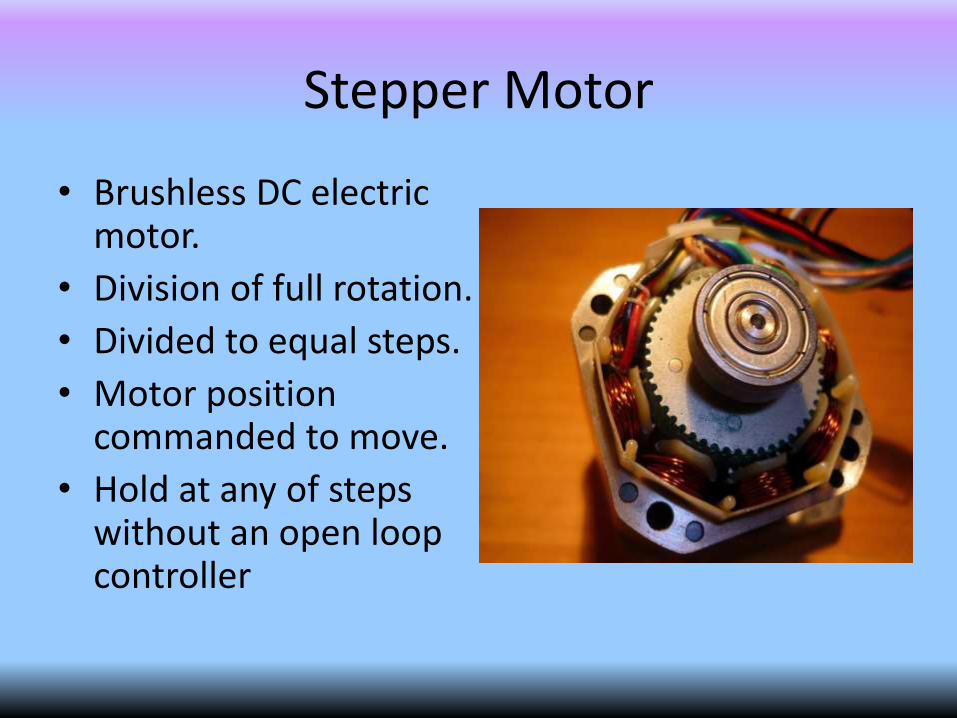
Stepper Motor
• Brushless DC electric motor.
• Division of full rotation.
• Divided to equal steps.
• Motor position commanded to move.
• Hold at any of steps without an open loop controller
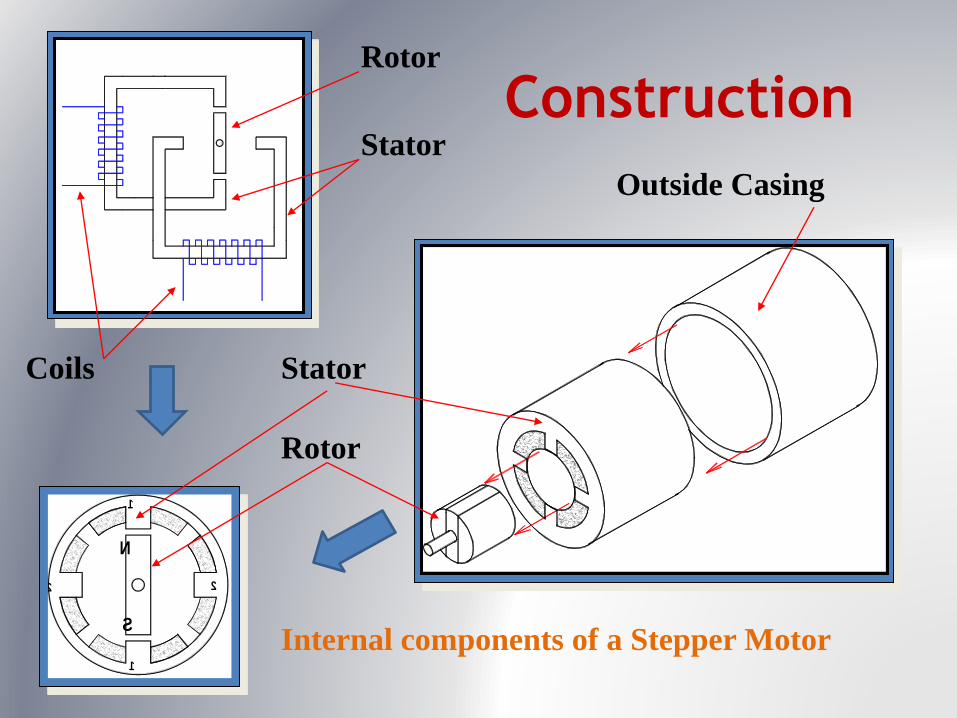
Rotor
Stator
Coils
2
1
S
N
1
2
Outside Casing
Stator
Rotor
Internal components of a Stepper Motor
Construction
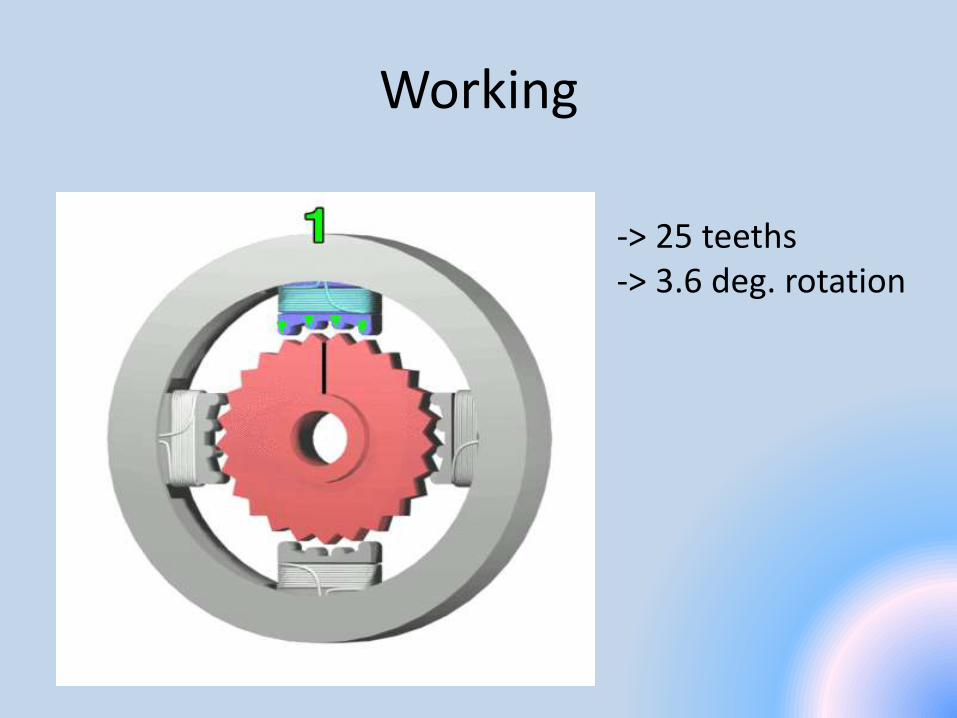
Working
-> 25 teeths-> 3.6 deg. rotation
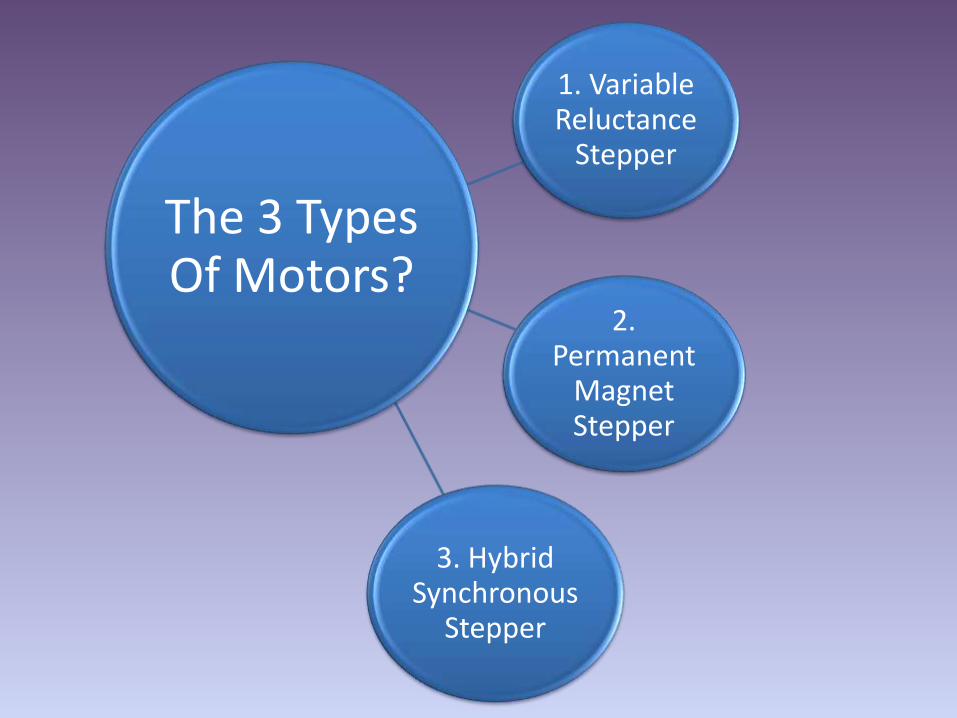
The 3 Types Of Motors?
1. Variable Reluctance
Stepper
2. Permanent
Magnet Stepper
3. Hybrid Synchronous
Stepper
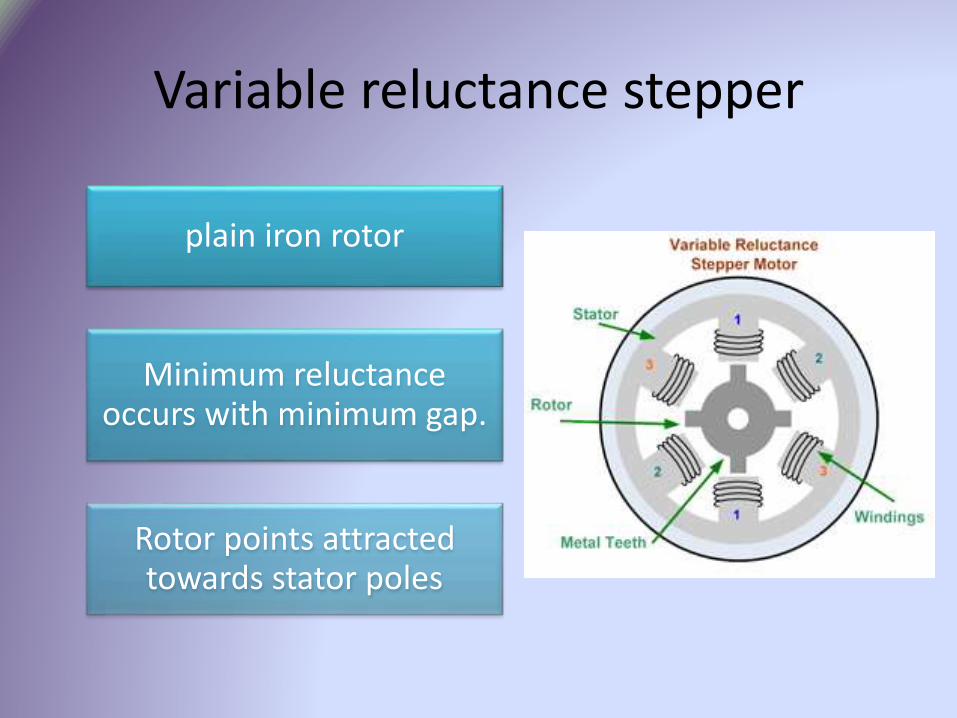
Variable reluctance stepper
plain iron rotor
Minimum reluctance occurs with minimum gap.
Rotor points attracted towards stator poles
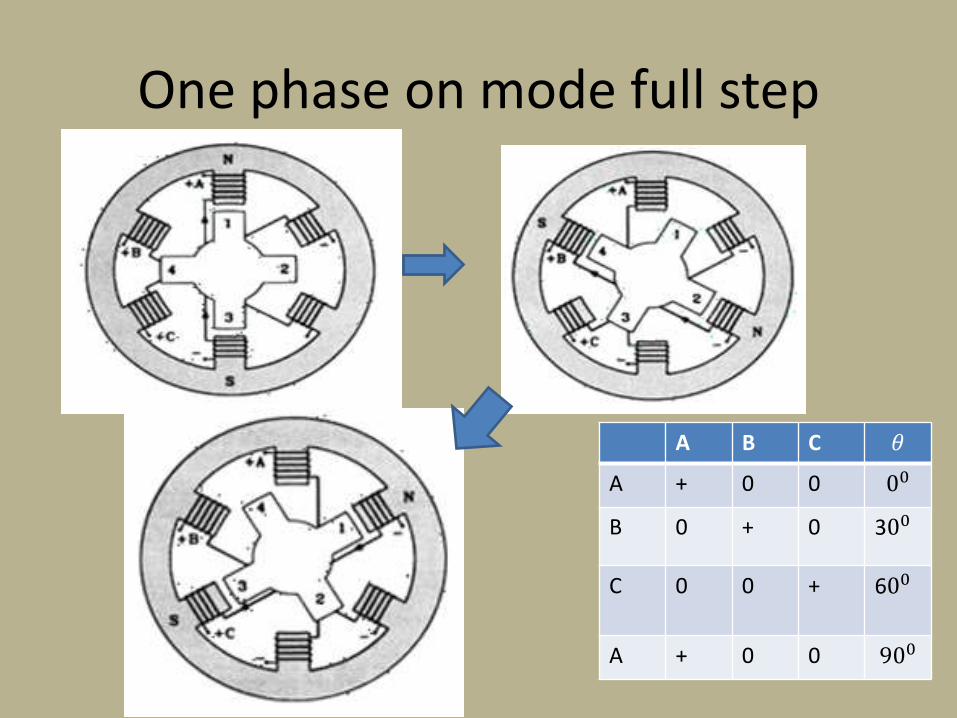
One phase on mode full step
A B C 𝜃
A + 0 0 00
B 0 + 0 300
C 0 0 + 600
A + 0 0 900
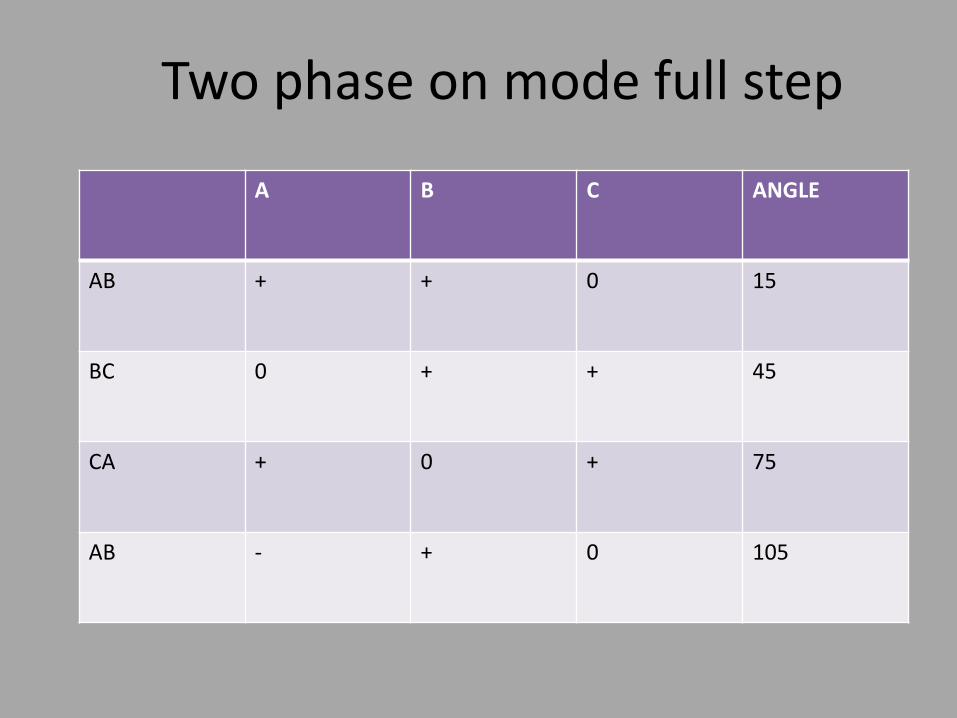
Two phase on mode full step
A B C ANGLE
AB + + 0 15
BC 0 + + 45
CA + 0 + 75
AB - + 0 105
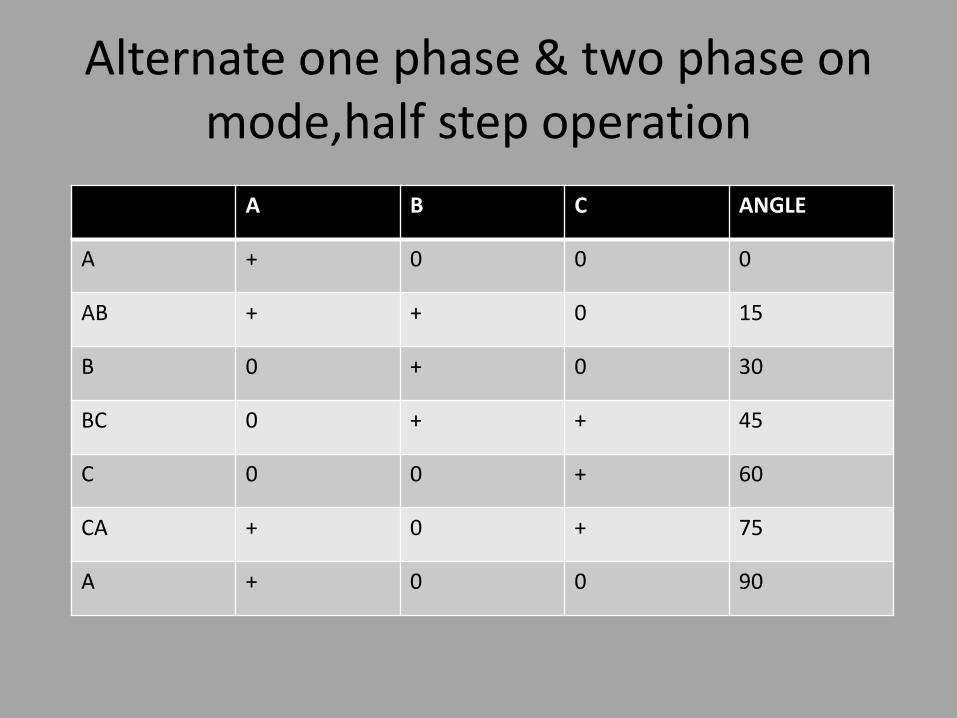
Alternate one phase & two phase on mode,half step operation
A B C ANGLE
A + 0 0 0
AB + + 0 15
B 0 + 0 30
BC 0 + + 45
C 0 0 + 60
CA + 0 + 75
A + 0 0 90
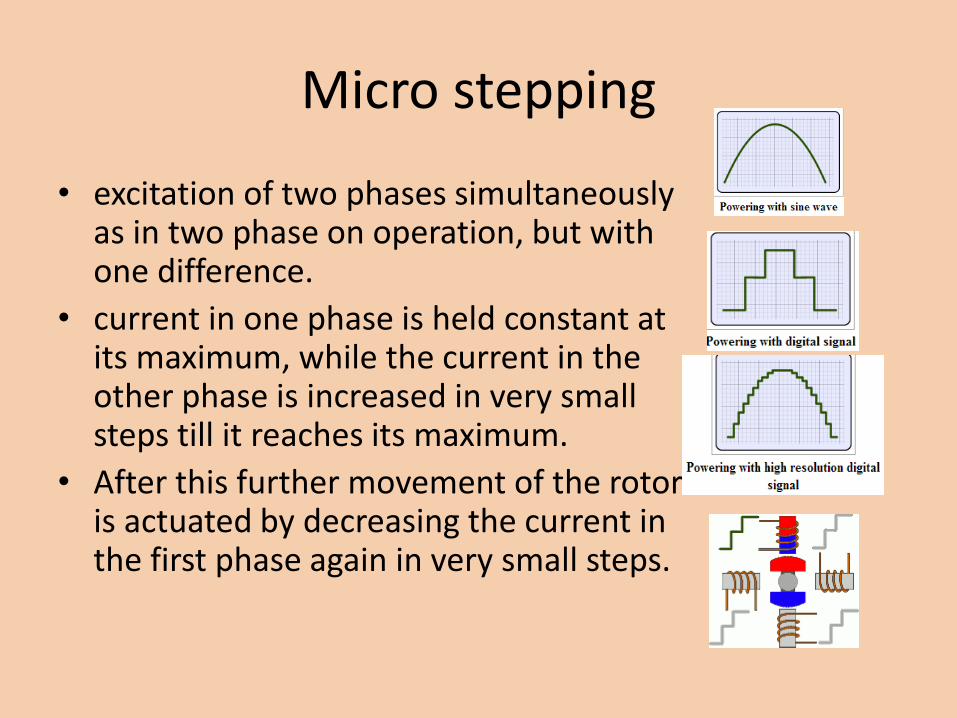
Micro stepping
• excitation of two phases simultaneously as in two phase on operation, but with one difference.
• current in one phase is held constant at its maximum, while the current in the other phase is increased in very small steps till it reaches its maximum.
• After this further movement of the rotor is actuated by decreasing the current in the first phase again in very small steps.
Permanent magnet stepper
• permanent magnet (PM) in the rotor • operate on the attraction or repulsion b/w the
rotor PM and the stator electromagnets.• The motor operates in the following modes of
operation:• One phase on mode full step operation.• Two phase on mode full step operation.• Alternate one phase on mode, Two phase on
mode, half step operation.• Micro stepping
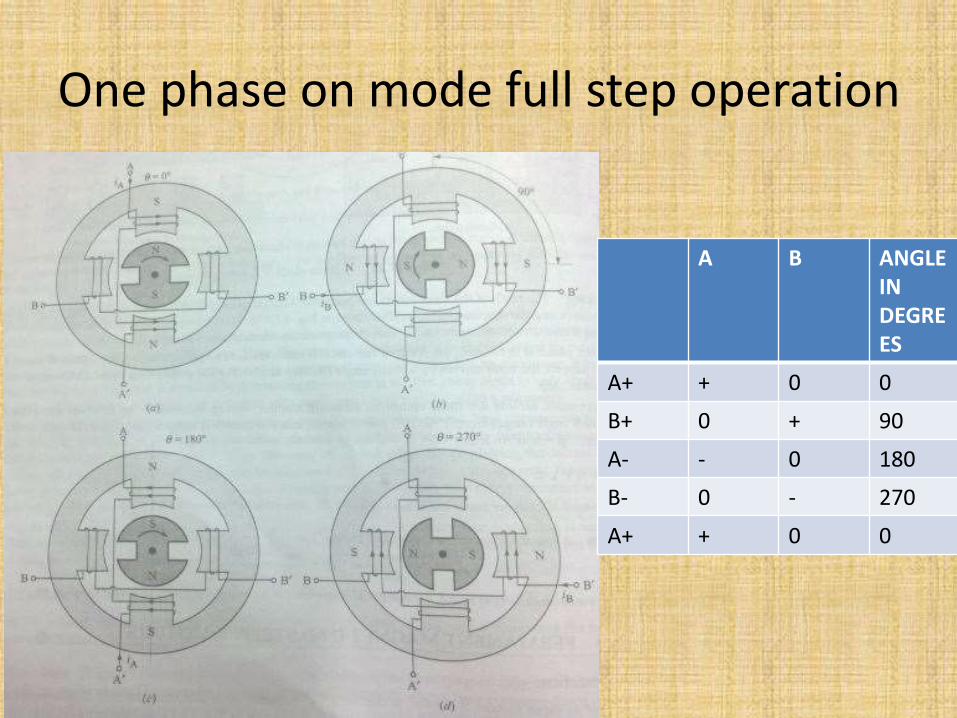
One phase on mode full step operation
A B ANGLE IN DEGREES
A+ + 0 0
B+ 0 + 90
A- - 0 180
B- 0 - 270
A+ + 0 0

Two phase on mode full step operation
A B ANGLE(DEG)
A+B+ + + 45
B+A- - + 135
A-B- - - 225
B-A+ + - 315
A+B+ + + 45
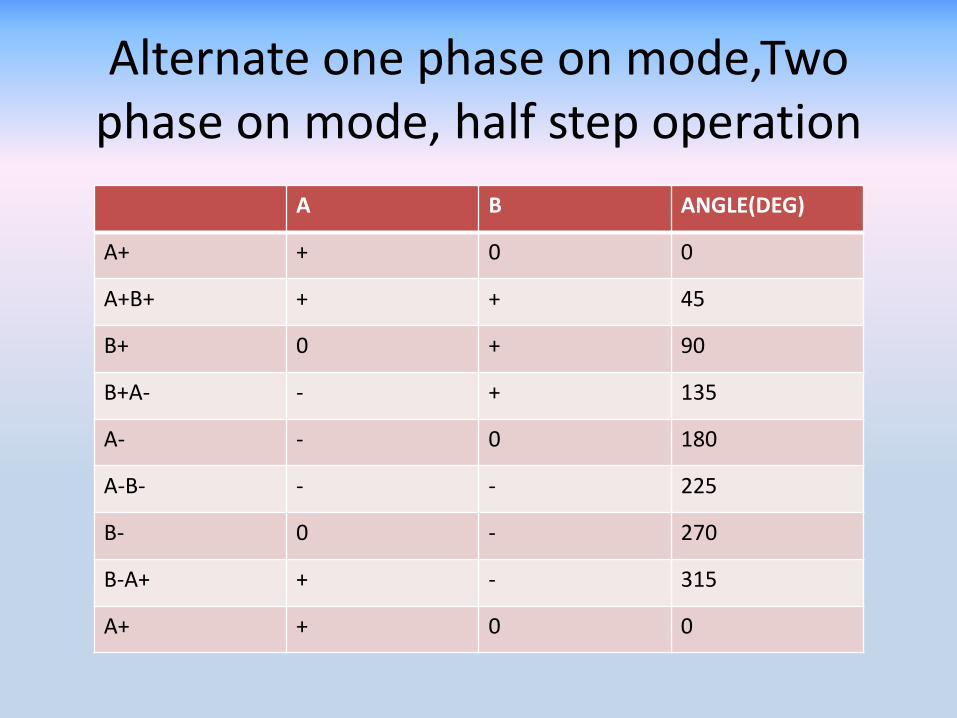
Alternate one phase on mode,Twophase on mode, half step operation
A B ANGLE(DEG)
A+ + 0 0
A+B+ + + 45
B+ 0 + 90
B+A- - + 135
A- - 0 180
A-B- - - 225
B- 0 - 270
B-A+ + - 315
A+ + 0 0
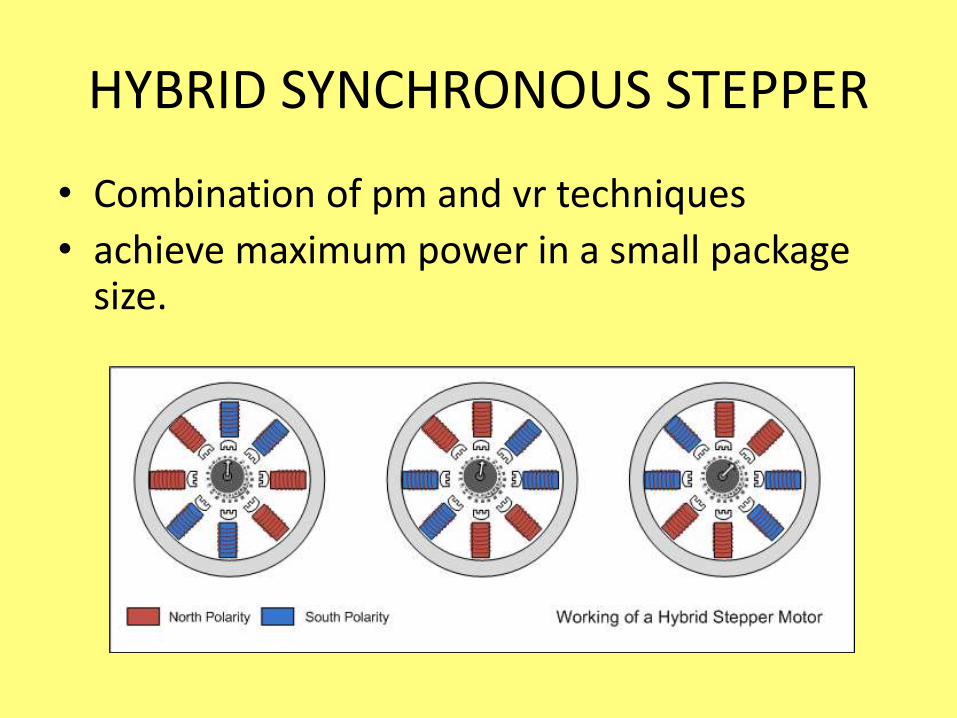
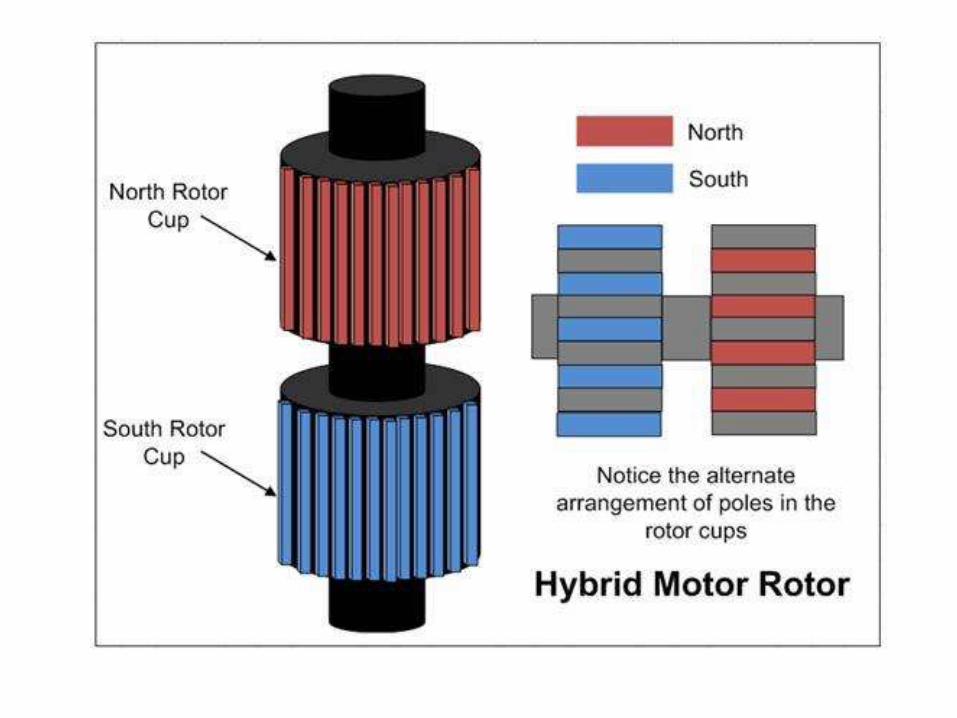
HYBRID SYNCHRONOUS STEPPER
• Combination of pm and vr techniques
• achieve maximum power in a small package size.
Phase current waveforms
•WAVE DRIVE
•FULL STEP DRIVE
•HALF STEPPING
•MICRO STEPPING
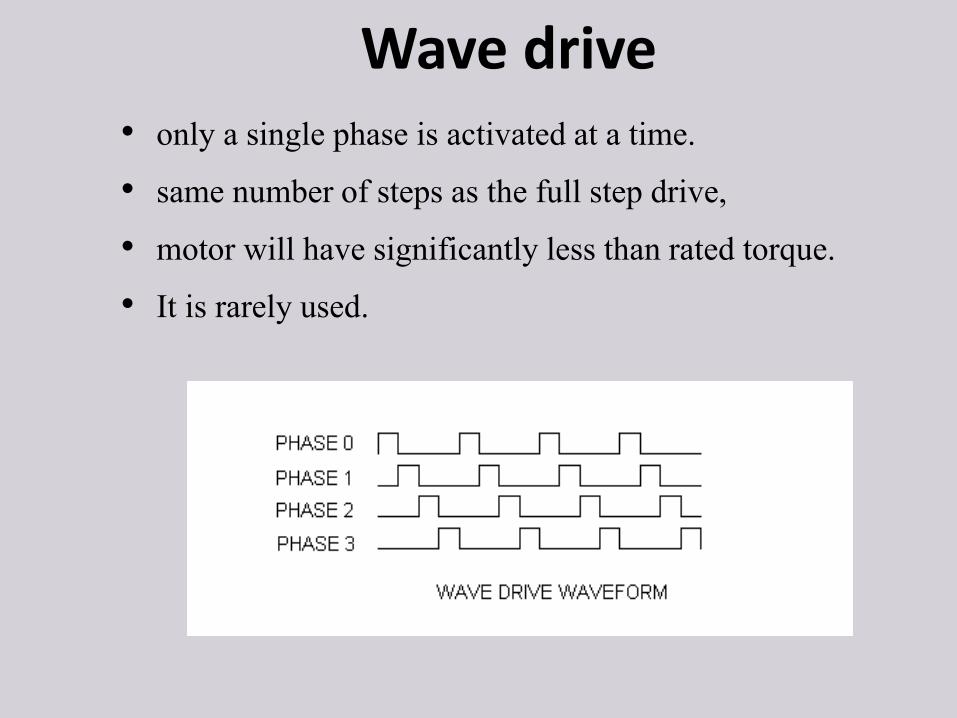
Wave drive• only a single phase is activated at a time.
• same number of steps as the full step drive,
• motor will have significantly less than rated torque.
• It is rarely used.
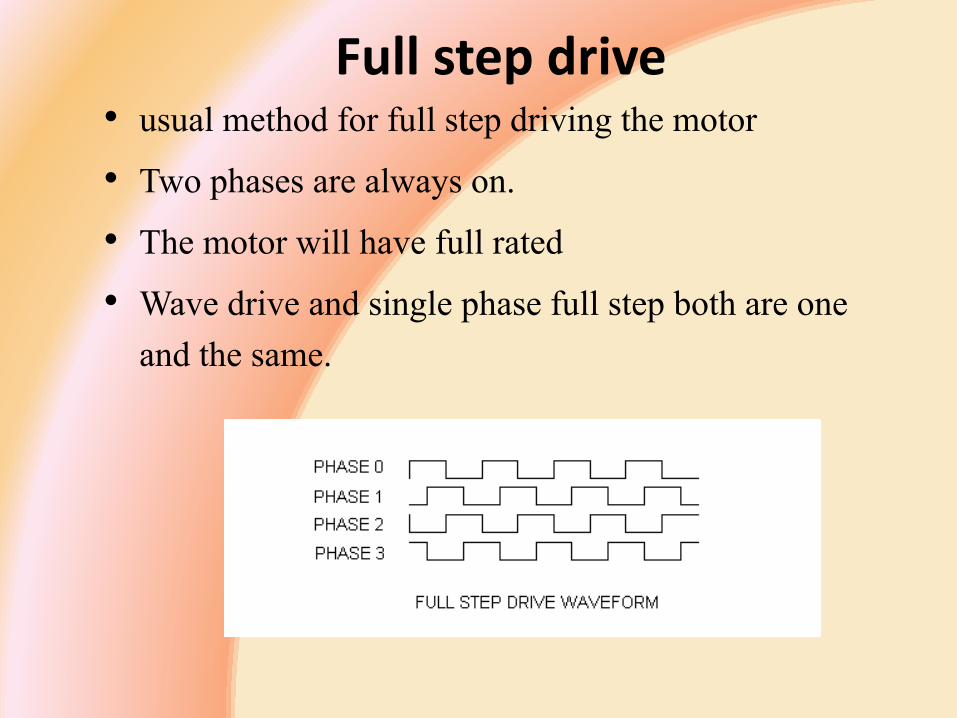
Full step drive• usual method for full step driving the motor
• Two phases are always on.
• The motor will have full rated
• Wave drive and single phase full step both are one and the same.
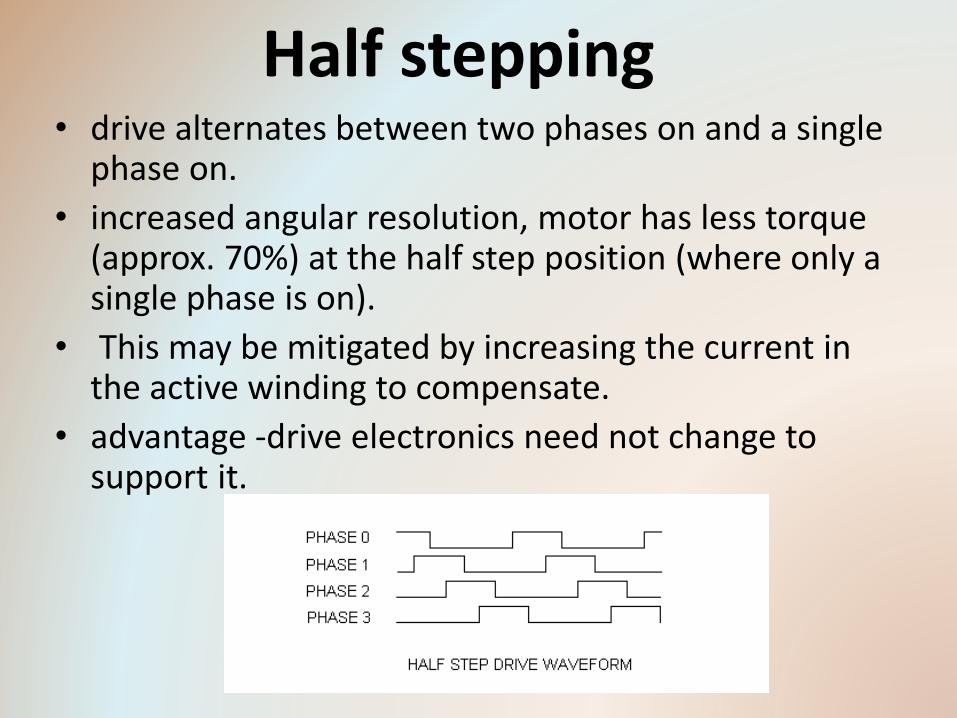
Half stepping• drive alternates between two phases on and a single
phase on.
• increased angular resolution, motor has less torque (approx. 70%) at the half step position (where only a single phase is on).
• This may be mitigated by increasing the current in the active winding to compensate.
• advantage -drive electronics need not change to support it.
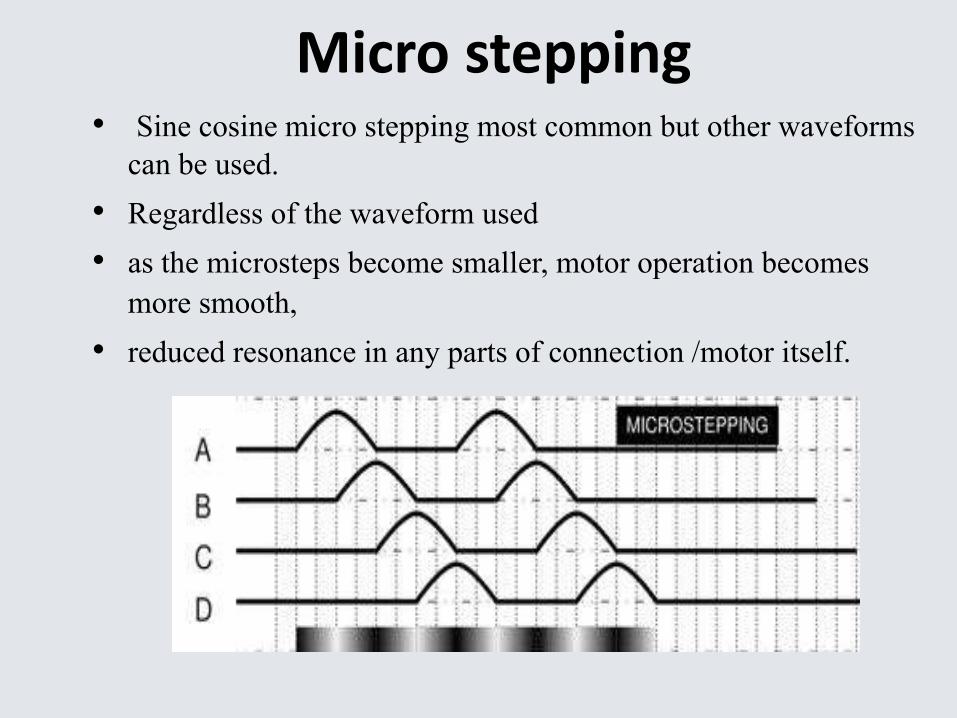
Micro stepping• Sine cosine micro stepping most common but other waveforms
can be used.
• Regardless of the waveform used
• as the microsteps become smaller, motor operation becomes more smooth,
• reduced resonance in any parts of connection /motor itself.
APPLICATIONS• They are commonly used in watches and old electric meters• They are used in wide variety
1. In IndustryAs - Drilling Machine,
- Grinder,- Laser Cutting,- Conveyor;&- Assembly Lines.
2. In computer PeripheralsAs - Printer,
- Plotter,- Tape Reader,- Card Reader;&- Copy Machines.
3. In Business As - Banking systems;&
- Automatic typewriters.
4. In Motion Control and RoboticsAs - Silicon Processing;&
- I.C. Bonding.
BIBLIOGRAPHY
• Book: Basic Electrical Engineering
Author: DC Kulshreshtha
• http://en.wikipedia.org/wiki/Stepper_motor
• http://www.omega.com/auto/pdf/REF_IntroStepMotors.pdf
• http://users.ece.utexas.edu/~valvano/Datasheets/StepperMicrostep.pdf
• http://zone.ni.com/devzone/cda/ph/p/id/287#toc2