
Development of Active Trailer Steering Systems for Pickup ...

See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/236028680
Steering the Last Trailer as a Virtual Tractor for Reversing Vehicles With
Passive On- and Off-Axle Hitches
Article in IEEE Transactions on Industrial Electronics · December 2013
DOI: 10.1109/TIE.2013.2240631
CITATIONS
35READS
942
4 authors:
Some of the authors of this publication are also working on these related projects:
Collaborative robotic system for hand-assisted laparoscopic surgery View project
Tactile Object Recognition View project
J. Morales
University of Malaga
52 PUBLICATIONS 1,157 CITATIONS
SEE PROFILE
Jorge L. Martínez
University of Malaga
81 PUBLICATIONS 1,671 CITATIONS
SEE PROFILE
Anthony Mandow
University of Malaga
83 PUBLICATIONS 1,629 CITATIONS
SEE PROFILE
Alfonso Garcia
University of Malaga
184 PUBLICATIONS 2,887 CITATIONS
SEE PROFILE
All content following this page was uploaded by Anthony Mandow on 02 June 2014.
The user has requested enhancement of the downloaded file.

Steering the Last Trailer as a Virtual Tractor for Reversing Vehicles with Passive On- and Off-Axle Hitches
Jesús Morales, Jorge L. Martínez, Anthony Mandow and Alfonso García-Cerezo
Departamento de Ingeniería de Sistemas y Automática
University of Málaga, 29071 Málaga, Spain. Email: jesus.morales[@]uma.es Abstract - The paper reports on a practical backward motion strategy for a vehicle pushing several passive trailers with any combination of on- and off-axle hitches. The last trailer is defined as a virtual tractor that can be guided along paths of varying curvature like a single non-holonomic vehicle. Then, kinematic relationships are proposed to translate the resulting motion commands to the actual tractor. The paper extends previous work by specifically addressing propagation of virtual set-points through on-axle hitches. This case is difficult because direct propagation cannot be achieved due to kinematic restrictions imposed by current joint angles. The method has been experimentally applied for both autonomous path-tracking and online operator steering using a tracked mobile robot with two different off- and on-axle combinations of dissimilar trailers. Results indicate applicability in autonomous vehicles and advanced driver assistance systems. Keywords: Mobile robots, robot control, tractor-trailer, articulated vehicles, multi-trailer vehicles, reversing, backing-up. ___________________________________________________________________________________________________ This document is a self-archiving copy of a copyrighted publication. Please check for the published article in: http://dx.doi.org/10.1109/TIE.2013.2240631 Citation Information Morales, J.; Martínez, J. L.; Mandow, A.; García-Cerezo, A. J.; , "Steering the Last Trailer as a Virtual Tractor for Reversing Vehicles With Passive On- and Off-Axle Hitches," IEEE Transactions on Industrial Electronics, vol.60, no.12, pp.5729,5736, Dec. 2013 doi: 10.1109/TIE.2013.2240631 @ARTICLE{Morales2013, author={J. Morales and J. L. Mart\'{i}nez and A. Mandow and A. Garc\'{i}a‐Cerezo}, title={Steering the Last Trailer as a Virtual Tractor for Reversing Vehicles With Passive On‐ and Off‐Axle Hitches}, journal={IEEE Transactions on Industrial Electronics}, year={2013}, volume={60}, number={12}, pages={5729 ‐ 5736}, }
__________________________________________________________________________________________ © 2013 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.

IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 60, NO. 12, DECEMBER 2013 5729
Steering the Last Trailer as a Virtual Tractor forReversing Vehicles With Passive
On- and Off-Axle HitchesJesús Morales, Jorge L. Martínez, Member, IEEE, Anthony Mandow, Member, IEEE, and
Alfonso J. García-Cerezo, Member, IEEE
Abstract—The paper reports on a practical backward motionstrategy for a vehicle pushing several passive trailers with anycombination of on- and off-axle hitches. The last trailer is definedas a virtual tractor that can be guided along paths of varyingcurvature like a single non-holonomic vehicle. Then, kinematicrelationships are proposed to translate the resulting motion com-mands to the actual tractor. The paper extends previous work byspecifically addressing propagation of virtual set-points throughon-axle hitches. This case is difficult because direct propagationcannot be achieved due to kinematic restrictions imposed bycurrent joint angles. The method has been experimentally appliedfor both autonomous path-tracking and online operator steeringusing a tracked mobile robot with two different off- and on-axlecombinations of dissimilar trailers. Results indicate applicabilityin autonomous vehicles and advanced driver assistance systems.
Index Terms—Land vehicles, mobile robots, motion control,robot kinematics, steering systems, vehicle driving.
I. INTRODUCTION
MOTION control is a relevant issue for multi-trailer ve-hicles [1], [2]. A trailer hitch is “on-axle” if it lies
on the preceding unit’s rear axle and is “off-axle” otherwise.Combinations of passive on- and off-axle hitches are referredto as the general n-trailer system [3]. These combinations arefrequent in vehicles such as airport luggage carriers and touristroad trains, whose wagons are built with a front off-axle and arear on-axle.
However, the challenging problem of backward motion withthe general n-trailer has received scarce attention in literature[4]–[6], as summarized in the classification presented in Fig. 1.In fact, even if the one-trailer case has been treated for a longtime [7]–[11] not so many works have addressed pushing mul-tiple passive trailers. Most of those propose nonlinear controlof the tractor, with approximate linearization [4], feedback lin-earization [6], [12], fuzzy control [13]–[15], switching control[5], or backstepping [16]. In general, the problem has received
Manuscript received July 27, 2011; revised January 19, 2012, November 28,2012, and December 3, 2012; accepted December 29, 2012. Date of publicationJanuary 16, 2013; date of current version June 21, 2013. This work wassupported in part by the Spanish CICYT project DPI 2011-22443.
The authors are with the Departamento de Ingeniería de Sistemas y Automá-tica, Escuela de Ingenierías. Universidad de Málaga, 29071 Málaga, Spain(e-mail: [email protected]; [email protected]; [email protected];[email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIE.2013.2240631
Fig. 1. Classification of backward control methods for tractor–trailer systems.
a theoretical approach which has led to complex solutions thatcan be difficult to implement and to tune [9], [11]. Still, thereis a growing interest to find practical solutions for the steeringcontrol problem [17].
As forward steering is easier, several virtual tractor def-initions have been proposed to reverse the kinematic chainfor backward motion. For a single on-axle trailer, the virtualtractor can be an imaginary vehicle with opposite kinematicswith respect to the actual one [18], [19]. When the hitch isoff-axle, virtual steering can be defined in the joint to avoidnon-holonomic constrains [20]. Alternatively, the trailer can beregarded as a virtual tractor [21], [22], which has been extendedto multi-body vehicles by propagating set-points through thekinematic chain [17], [23]–[27].
Virtual set-point propagation to a holonomic tractor throughidentical off-hitched trailers shows good performance in tra-jectory tracking, where joint angle measurement errors mayresult in deviations from the path but do not provoke instability[17]. A similar trailer configuration has also been consideredfor a reversed car-like tractor [24], [26]. Furthermore, solutionsfor heterogeneous off-axle trailers pushed by a non-holonomicvehicle have been tested in simulation [27] and with a trackedmobile robot [23]. However, the propagation through on-axlehitches poses an additional difficulty because it cannot beachieved directly [25]. Furthermore, to the knowledge of theauthors, propagation through a kinematic chain with both kindsof hitches has not yet been treated.
This paper extends [23] to achieve backward steering of atractor with non-holonomic constraints pushing any combina-tion of off- and on-axle passive trailers. To this end, a new
0278-0046/$31.00 © 2013 IEEE

5730 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 60, NO. 12, DECEMBER 2013
Fig. 2. Parameters of the kinematic chain. Superscript v refers to the virtualtractor in backward motion.
solution is proposed to allow virtual set-point propagationthrough on-axle joints. Both path-tracking and online operatorsteering experiments have been performed with the trackedmobile robot Auriga-α for two different off- and on-axle com-binations of two dissimilar trailers.
The paper is organized as follows. The next section re-views the virtual tractor concept for backward motion control.Section III proposes a solution for set-point propagationthrough on-axle hitches. Section IV offers experimental results.Conclusions and ideas for future work are given in Section V.
II. BACKWARD MOTION CONTROL BASED ON KINEMATICS
This section defines the kinematic model of a generaln-trailer vehicle and reviews the virtual tractor concept intro-duced in [23].
A. Kinematic Model for Passive Trailers
In practice, a kinematic approach without further dynamicconsiderations can be useful under the assumption of single-axle trailers with pure-rolling wheels moving on the plane withmoderate velocities and accelerations [28].
An n-trailer system can be considered as a kinematic chainconsisting of n+ 1 units, where the non-holonomic tractor isunit 0, and trailers are numbered from 1 to n (see Fig. 2). Thelocal coordinate frame of the ith unit has the Xi axis lying onits axle and the Yi axis in the forward motion direction. Forthe ith trailer, length Li−1 b is a positive constant for off-axlehitching and is null for the on-axle case. Length Lif is also apositive or null constant. To avoid useless trailer configurations,both Li−1 b and Li b must be greater than zero when Lif = 0.The state of the system is determined by the pose of the tractorand all joint angles.
Let θ0 be the tractor’s heading with respect to the globalcoordinate system XY . The relative angle of the ith trailer withrespect to the (i− 1)th unit is represented by θi. The headingφi of the ith trailer with respect to the global frame can becomputed as
φi =
i∑j=0
θj (1)
where all angles are considered counterclockwise positive.Moreover, the relative angular velocity ωi of the ith unit withrespect to the preceding one is defined by
ωi =d θidt
. (2)
Consequently, its angular velocity in the global frame is
Ωi =
i∑j=0
ωj (3)
and its longitudinal speed is
vi =d sidt
(4)
where si is the traveled distance. Furthermore, its curvature γi(i.e., the inverse of its instantaneous turning radius) is related toΩi and vi as
γi =d φi
dsi=
Ωi
vi⇒ Ωi = vi γi. (5)
Thus, the motion of each unit can be defined both as (vi,Ωi) or(vi, γi). The second option will be preferred for the experimentsin Section IV because curvature is more intuitive for driversteering.
The only control inputs to the articulated system are thelongitudinal v0 and angular Ω0 speeds of the non-holonomictractor, which propagate through the kinematic chain asfollows:
vi = vi−1 cos(θi)− Ωi−1Li−1 b sin(θi) (6)
Ωi = − vi−1 sin(θi) + Ωi−1Li−1 b cos(θi)
Li f. (7)
B. Virtual Tractor Definition
Backward motion control of an articulated vehicle can beimplemented by considering the nth trailer as a virtual tractorthat moves forward (see Fig. 2). Therefore, the local axis of thevirtual tractor Xv
0Yv0 is defined by a 180◦ rotation of the last
trailer’s frame XnYn, and the global pose of the virtual tractorbecomes
xv0 = xn, yv0 = yn, φv
0 = φn + π. (8)
This uses an estimation of (xn, yn, φn) that can be obtainedfrom specific sensors in the last trailer [17] or from kinematicrelationships based on the tractor’s pose and hitch angle mea-surements [22], [23].
Transforming virtual tractor set-points (vv0s,Ωv0s) into control
inputs for the actual tractor (v0s,Ω0s) requires a propagationstarting from the last trailer, whose values are
vns = − vv0s (9)
Ωns =Ωv0s. (10)
MORALES et al.: STEERING THE LAST TRAILER AS A VIRTUAL TRACTOR 5731
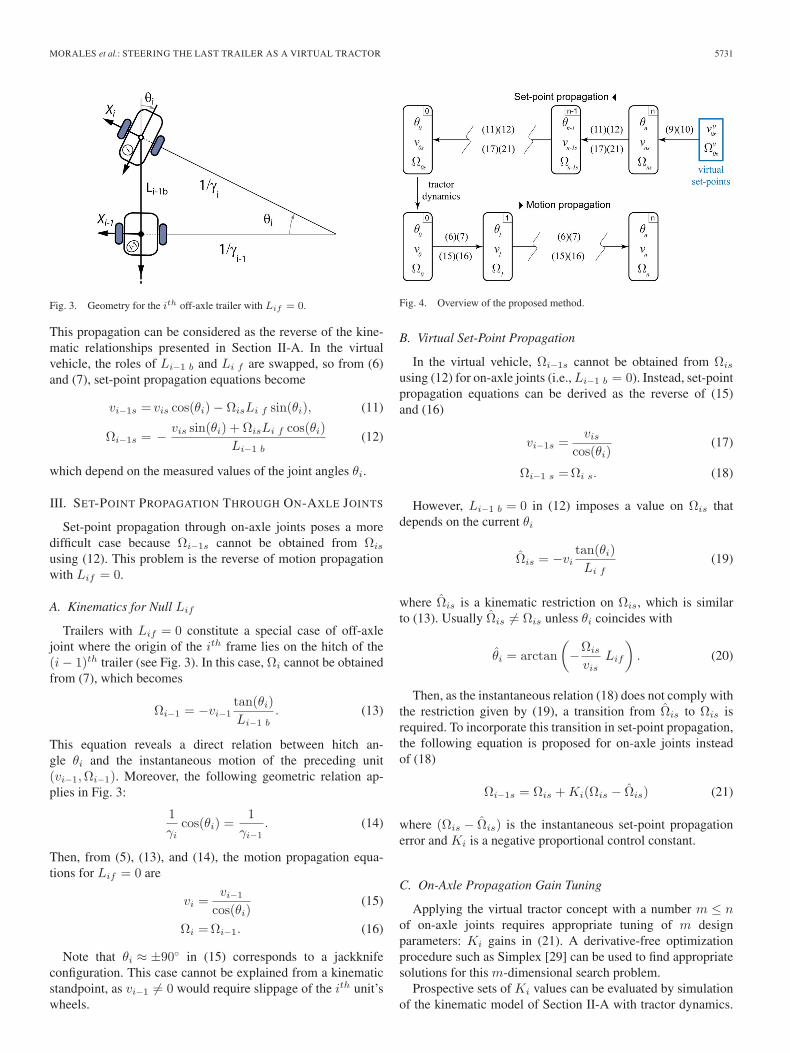
Fig. 3. Geometry for the ith off-axle trailer with Lif = 0.
This propagation can be considered as the reverse of the kine-matic relationships presented in Section II-A. In the virtualvehicle, the roles of Li−1 b and Li f are swapped, so from (6)and (7), set-point propagation equations become
vi−1s = vis cos(θi)− ΩisLi f sin(θi), (11)
Ωi−1s = − vis sin(θi) + ΩisLi f cos(θi)
Li−1 b(12)
which depend on the measured values of the joint angles θi.
III. SET-POINT PROPAGATION THROUGH ON-AXLE JOINTS
Set-point propagation through on-axle joints poses a moredifficult case because Ωi−1s cannot be obtained from Ωis
using (12). This problem is the reverse of motion propagationwith Lif = 0.
A. Kinematics for Null Lif
Trailers with Lif = 0 constitute a special case of off-axlejoint where the origin of the ith frame lies on the hitch of the(i− 1)th trailer (see Fig. 3). In this case, Ωi cannot be obtainedfrom (7), which becomes
Ωi−1 = −vi−1tan(θi)
Li−1 b. (13)
This equation reveals a direct relation between hitch an-gle θi and the instantaneous motion of the preceding unit(vi−1,Ωi−1). Moreover, the following geometric relation ap-plies in Fig. 3:
1
γicos(θi) =
1
γi−1. (14)
Then, from (5), (13), and (14), the motion propagation equa-tions for Lif = 0 are
vi =vi−1
cos(θi)(15)
Ωi =Ωi−1. (16)
Note that θi ≈ ±90◦ in (15) corresponds to a jackknifeconfiguration. This case cannot be explained from a kinematicstandpoint, as vi−1 �= 0 would require slippage of the ith unit’swheels.
Fig. 4. Overview of the proposed method.
B. Virtual Set-Point Propagation
In the virtual vehicle, Ωi−1s cannot be obtained from Ωis
using (12) for on-axle joints (i.e., Li−1 b = 0). Instead, set-pointpropagation equations can be derived as the reverse of (15)and (16)
vi−1s =vis
cos(θi)(17)
Ωi−1 s =Ωi s. (18)
However, Li−1 b = 0 in (12) imposes a value on Ωis thatdepends on the current θi
Ω̂is = −vitan(θi)
Li f(19)
where Ω̂is is a kinematic restriction on Ωis, which is similarto (13). Usually Ω̂is �= Ωis unless θi coincides with
θ̂i = arctan
(−Ωis
visLif
). (20)
Then, as the instantaneous relation (18) does not comply withthe restriction given by (19), a transition from Ω̂is to Ωis isrequired. To incorporate this transition in set-point propagation,the following equation is proposed for on-axle joints insteadof (18)
Ωi−1s = Ωis +Ki(Ωis − Ω̂is) (21)
where (Ωis − Ω̂is) is the instantaneous set-point propagationerror and Ki is a negative proportional control constant.
C. On-Axle Propagation Gain Tuning
Applying the virtual tractor concept with a number m ≤ nof on-axle joints requires appropriate tuning of m designparameters: Ki gains in (21). A derivative-free optimizationprocedure such as Simplex [29] can be used to find appropriatesolutions for this m-dimensional search problem.
Prospective sets of Ki values can be evaluated by simulationof the kinematic model of Section II-A with tractor dynamics.

5732 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 60, NO. 12, DECEMBER 2013
Fig. 5. Simulation of set-point responses of a backward three-trailer vehicle with two on-axle joints: (a) Equivalent forward vehicle, (b) optimized gains,(c) doubled gains, and (d) halved gains.
To this end, minimization of the following quadratic cost func-tion for the step response to (vv0s,Ω
v0s) is proposed
J =
∞∫0
( ∑∀i,
Li−1 b=0
(Ωis(t)− Ω̂is(t)
)2
m
+λ (Ω0s(t)− Ω0s(∞))2)dt (22)
where Ω0s(∞) = Ωv0s because all relative angular speeds are
null in steady state. The two terms in (22) account for: theset-point propagation error in (21), and the difference betweenthe propagated set-point for the actual tractor and its stationaryvalue. The relative weight for these terms is given by designparameter λ, which serves to achieve similar magnitudes forboth terms.
D. Transient Considerations
The formulation developed above is summarized in Fig. 4.The actual response of the virtual tractor (vv0 ,Ω
v0) to a virtual
set-point (vv0s,Ωv0s) is not instantaneous but is determined by
two factors:• Set-point propagation. For every on-axle trailer, (21) in-
troduces a transient that does not occur in (11) and (12)for off-axle trailers.
• Motion propagation. When set-points reach the actualtractor, locomotion dynamics are transmitted up to thevirtual tractor through the kinematic chain with (6) and(7) or (15) and (16) depending on the value of Lif .
Due to the first factor, the transient of the general n-trailer ismore complex than in an equivalent forward system. To providea better insight on this transient, a simulation example is givenin Fig. 5. This figure presents the step response of a three-trailer differential drive vehicle of which the first and the last
trailers are on-axle. Virtual set-points are vv0s = 0.8 m/s andΩv
0s = 0.16 rad/s. Kinematic parameters are L0b = 0 m, L1f =0.81 m, L1b=0.75 m, L2f = 1.6 m, L2b=0 m, L3f =0.89 m.The simulation uses the kinematic model of Section II-Aand linear first-order actuator dynamics with a time constantof 0.15 s.
Furthermore, the response of the equivalent forward system(i.e., the ideal behavior) is shown in Fig. 5(a) for comparison.It can be observed that joints in forward systems can have astep response that resembles that of non-minimum phase [28],which is the case of θ3.
The backward transient with optimized gains is presentedin Fig. 5(b), where K1 = −20.41 and K3 = −2.45 have beencomputed with λ = 10−3 in (22). The difference in the magni-tude of both gains can be explained by the different propagationrequirements of the corresponding joints. The last on-axletrailer has a step change in the virtual set-point whereas the firstone receives a smoother set-point from propagation. Therefore,a smaller gain serves to avoid large transients in the last on-axletrailer.
In comparison with the equivalent forward system, where thetransient obeys uniquely to tractor actuators, Fig. 5(b) shows aslower response. In addition, the non-minimum phase behaviorappears in a more complex way because of the on-axle joints.Nevertheless, the virtual tractor successfully reaches the steadystate much sooner that the other units, including the actualtractor, which behave as if they were towed by it.
The effect of different gain values is illustrated in Fig. 5(c)and (d). When the values of K1 and K2 are doubled [seeFig. 5(c)], the response becomes oscillatory and the virtual set-point (vv0s,Ω
v0s) is not actually reached. On the other hand,
halving the value of the optimized gains, as shown in Fig. 5(d),renders a much slower response to Ωv
0s. Furthermore, null gainvalues, which would be equivalent to using (18) instead of(21), result in an unstable response (not shown in the figure).Instability also appears when gains are too high.

MORALES et al.: STEERING THE LAST TRAILER AS A VIRTUAL TRACTOR 5733
Fig. 6. Auriga-α mobile robot (right) towing a load carrier (center) and asprayer (left), with off/off-axle (a) and off/on-axle (b) setups.
IV. EXPERIMENTAL RESULTS
A. Auriga-α Robot and Trailers
The proposed backward steering method has been tested onthe Auriga-α mobile robot (see Fig. 6). Its dimensions are1.24 m (length), 0.75 m, (width) and 0.84 m (height), andit weights 258 kg. This is a skid-steer tracked vehicle drivenby two geared direct current motors with incremental shaftencoders for dead-reckoning. An on-board digital signal pro-cessor executes track speed control every 10 ms and givesodometric data every 30 ms. The motor dynamics has beendetermined experimentally as a linear first-order system with atime constant of 0.15 s. The top speed of the vehicle coincideswith the maximum track speed (1 m/s) in straight-line motionbut decreases to zero as curvature grows.
The tractor can be controlled as a differential drive vehiclewith zero turning radius using an approximated kinematicmodel [30]. This model also provides odometric estimationsand a definition of a theoretical differential drive axle that isrelevant to determine hitch parameter L0b (see Fig. 2).
The global pose of the actual tractor (x0, y0, φ0) is obtainedevery 270 ms by correcting odometric estimations with anaccurate laser scan matching technique [31] using an onboardSick LMS 200 rangefinder. Then, the global position of thevirtual tractor is estimated recursively by
xi =xi−1 + Li−1 b sin(φi−1) + Li f sin(φi) (23)
yi = yi−1 − Li−1 b cos(φi−1)− Li f cos(φi) (24)
and heading is provided by (1).The dimensions of the two-wheeled trailers are similar to
those of the tractor. The first trailer is a load carrier and thesecond one is a sprayer (see Fig. 6). Two different setupsare possible by manually repositioning the axle of the firsttrailer: off/off, with both trailers off-axle, and off/on, with thelast trailer on-axle. Hitch angles θi are measured by inter-unitdraw-wire displacement sensors [28]. Kinematic parametersand mechanical angle limits for both setups are: L0b = 0.71 m,L2f = 0.81 m, θ1m = 68◦ and θ2 m = 43.6◦. The rest of the
Fig. 7. Outline of the reference path for the path-tracking experiments in awarehouse.
parameters are L1f = 0.99 m, L1b = 0.61 m for off/off, andL1f = 1.60 m, L1b = 0 m for off/on.
Simplex optimization via simulations has been employed tominimize (22) in the off/on case. The resulting value for theset-point propagation gain is K2 = −1.75 with λ = 1.
B. Curvature Limitations
Practical solutions for multi-trailer vehicles have to take intoaccount mechanical bounds of hitch angles to avoid inter-unitcollision and jackknife. Mechanical curvature bounds of car-like tractors have been considered to plan trackable paths withone trailer [4], [9]. Further curvature limitations served to avoidinter-unit collisions with a single trailer for both forward andbackward motion [22], and also for multi-trailer in the forwardcase [28]. An off-line method to establish curvature limitationsfor a virtual tractor was proposed in [23] and is employed for theexperiments presented below. Thus, the curvature limit has beencomputed as γv
0 m = 0.45 m1 for off/off and γv0 m = 0.40 m−1
for off/on.
C. Path-Tracking Experiments
This section presents path-tracking experiments in which thevirtual tractor follows a reference path. For this purpose, a pathtracker for non-holonomic vehicles issues motion set-points(vv0s, γ
v0s) for the guide point defined by (8). Therefore, the rest
of the trailers and the actual tractor can deviate with respect tothe reference path [32].
In the experiments, virtual steering γv0s is computed by Pure
Pursuit [33], a geometrically motivated path tracker for singlevehicles [34] that has also been considered for tractor–trailersystems [9], [10]. The lookahead distance has been set to 1.1 mand vv0s = 0.3 m/s. This algorithm has been implemented in anon-board Pentium-IV (2.2 GHz) industrial PC under a real-timeoperating system to produce a new γv
0s every 30 ms.The reference path is made up of two straight segments
joined by a 270◦ arc in an industrial warehouse (see Fig. 7).The curvature of this arc is 0.55 m−1. Results are presented inFigs. 8 and 9. Initial positions of all units, denoted by “o”s in thefigures, are some distance away from the reference path with allhitch angles close to zero.
The reference path and the actual paths followed by all unitswith the off/off setup are presented in Fig. 8(a). Virtual tractorpose estimation with (1), (23) and (24) is affected by noise from

5734 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 60, NO. 12, DECEMBER 2013
Fig. 8. Path tracking with the off/off setup and curvature limitation γv0m =
0.45 m−1: paths (a), virtual curvature set-points (b), and hitch angles (c).
Fig. 9. Path tracking with the off/on setup and curvature limitation γv0m =
0.4 m−1: paths (a), virtual curvature set-points (b), and hitch angles (c).
the tractor localization and hitch angle readings θi. This noiseprovokes fast changes on the virtual curvature set-point, as seenin Fig. 8(b), which are eventually filtered by the actuators of theactual tractor.
Imposing a curvature limitation γv0m on the virtual tractor
maintains hitch angles within their corresponding mechanicallimits [see Fig. 8(c)]. Thus, path completion is achieved with-out inter-unit collisions even if a tracking error occurs whilefollowing the arc, whose curvature exceeds γv
0m [see Fig. 8(a)].This tracking error implies that curvature limitations should beaccounted for planning admissible paths that can be faithfullytracked by an articulated vehicle [35].
Precisely, an admissible reference path has been planned forthe experiments with the off/on setup (see Fig. 9), where thearc complies with γv
0m = 0.40 m−1. This admissible path isfollowed by the virtual tractor with small tracking errors. Thedeviation of the actual tractor from the virtual tractor path (i.e.,the off-tracking) while following the arc is more noticeable than
Fig. 10. Outline of the parking lot experiments for online steering.
Fig. 11. Online steering of Auriga-α with off/off (a) and off/on (b) setups.
in the off/off experiment, which is a result of the kinematicparameters of this configuration [32].
D. Online Steering by an Operator
Online steering by an operator in outdoor areas is anotherpotential application scenario for the proposed method. Ex-periments have been performed along the parking lot courseoutlined in Fig. 10, where the virtual tractor has been steeredwith a joystick. This course includes a speed bump (height:2 cm; width: 115 cm) as a commonly found road perturbation.
Two driving examples corresponding to both trailer setupsare shown in Fig. 11. Curvature limitations on the virtual tractorare perceived by the driver as if they were mechanical curvaturebounds of a single vehicle. In these experiments, the driverfound more difficulty in steering the off/on configuration, whichhas a more oscillatory path. The reason for this can be attributedto the transient introduced by set-point propagation through theon-axle trailer.

MORALES et al.: STEERING THE LAST TRAILER AS A VIRTUAL TRACTOR 5735
V. CONCLUSION
This paper proposes a pragmatic backward motion controlmethod for a vehicle pushing passive trailers where the lasttrailer is defined as a virtual tractor. Then, virtual motioncommands are propagated kinematically up to the actual tractorusing hitch angle measurements.
The proposed contribution extends [23] for any combinationof on- and off-axle trailers by specifically addressing propaga-tion of virtual set-points through on-axle hitches. The difficultyof this case arises from kinematic restrictions imposed bycurrent joint angles. The new solution introduces a set-pointtransient governed by proportional gains as well as a methodto tune them.
Relevant applications such as path-tracking and online steer-ing have been tested on a real vehicle: the tracked mobile robotAuriga-α pushing two heterogeneous trailers with two differenton- and off-axle combinations. In addition, curvature limita-tions have been taken into account to avoid jackknife and inter-unit collisions. Experiments have shown a good performance ofthe system by steering the virtual tractor.
Nevertheless, the transition required by on-axle joints in-creases driving difficulty. This issue will have to be addressedin future work. Furthermore, steer-by-wire vehicles [36] makepossible that the proposed method can be applied to advanceddriver assistance systems for reverse maneuvers [26], [37].
REFERENCES
[1] M. Ibrahim, I. Spark, and A. Percy, “New control concept for a gantrytractor comprising a chorus line of synchronized modules,” IEEE Trans.Ind. Electron., vol. 57, no. 2, pp. 762–768, Feb. 2010.
[2] A. Percy, I. Spark, and M. Ibrahim, “New algorithms for navigating agantry tractor comprising a chorus line of synchronized modules,” IEEETrans. Ind. Electron., vol. 58, no. 2, pp. 398–402, Feb. 2011.
[3] C. Altafini, “Following a path of varying curvature as an output regulationproblem,” IEEE Trans. Autom. Control, vol. 47, no. 9, pp. 1551–1556,Sep. 2002.
[4] A. W. Divelbiss and J. T. Wen, “Trajectory tracking control of a cartrailersystem,” IEEE Trans. Control Syst. Technol., vol. 5, no. 3, pp. 269–278,May 1997.
[5] C. Altafini, A. Speranzon, and B. Eahlberg, “A feedback control schemefor reversing a truck and trailer vehicle,” IEEE Trans. Robot. Autom.,vol. 17, no. 6, pp. 915–922, Dec. 2001.
[6] R. M. DeSantis, J. M. Bourgeot, J. N. Todeschi, and R. Hurteau, “Path-tracking for tractor-trailers with hitching of both the on-axle and theoff-axle kind,” in Proc. IEEE Int. Symp. Intell. Control, Vancouver, BC,Canada, 2002, pp. 206–211.
[7] U. Larsson, C. Zell, K. Hyyppä, and A. Wernersson, “Navigating anarticulated vehicle and reversing with a trailer,” in Proc. IEEE Int. Conf.Robot. Autom., San Diego, CA, USA, 1994, pp. 2398–2404.
[8] M. Sampei, T. Tamura, T. Kobayashi, and N. Shibui, “Arbitrary pathtracking control of articulated vehicles using nonlinear control the-ory,” IEEE Trans. Control Syst. Technol., vol. 3, no. 1, pp. 125–131,Mar. 1995.
[9] C. Pradalier and K. Usher, “Robust trajectory tracking for a revers-ing tractor trailer,” J. Field Robot., vol. 25, no. 6/7, pp. 378–399,Apr. 2008.
[10] A. González-Cantos and A. Ollero, “Backing-up maneuvers of au-tonomous tractor-trailer vehicles using the qualitative theory of nonlin-ear dynamical systems,” Int. J. Robot. Res., vol. 28, no. 1, pp. 49–65,Jan. 2009.
[11] Z. Leng and M. Minor, “A simple tractor-trailer backing control lawfor path following,” in IEEE/RSJ Int. Conf. Intell. Robots Syst., Taipei,Taiwan, 2010, pp. 5538–5542.
[12] P. Bolzern, R. M. DeSantis, A. Locatelli, and D. Masciocchi, “Path-tracking for articulated vehicles with off-axle hitching,” IEEE Trans.Control Syst. Technol., vol. 6, no. 4, pp. 515–523, Jul. 1998.
[13] K. Tanaka, S. Hori, and H. Wang, “Multiobjective control of a vehiclewith triple trailers,” IEEE/ASME Trans. Mechatronics, vol. 7, no. 3,pp. 357–368, Sep. 2002.
[14] A. Riid, J. Ketola, and E. Rüstern, “Fuzzy knowledge-based control forbacking multi-trailer systems,” in Proc. IEEE Intell. Veh. Symp., Istanbul,Turkey, 2007, pp. 498–504.
[15] K. Tanaka, K. Yamauchi, H. Ohtake, and H. O. Wang, “Sensor reductionfor backing-up control of a vehicle with triple trailers,” IEEE Trans. Ind.Electron., vol. 56, no. 2, pp. 497–509, Feb. 2009.
[16] J. Yuan and Y. Huang, “Path following control for tractor-trailer mobilerobots with two kinds of connection structures,” in Proc. IEEE Int. Conf.Intell. Robots Syst., Beijing, China, 2006, pp. 2533–2538.
[17] W. Chung, M. Park, K. Yoo, J. Roh, and J. Choi, “Backward-motioncontrol of a mobile robot with n passive off-hooked trailers,” J. Mech.Sci. Technol., vol. 25, no. 11, pp. 2895–2905, Nov. 2011.
[18] F. Lamiraux, S. Sekhavat, and J. P. Laumond, “Motion planning andcontrol for Hilare pulling a trailer,” IEEE Trans. Robot. Autom., vol. 15,no. 4, pp. 640–652, Aug. 1999.
[19] J. Cheng, Y. Zhang, S. Hou, and B. Song, “Stabilization control of abackward tractor-trailer mobile robot,” in Proc. 8th World Congr. Intell.Control Autom., Jinan, China, 2010, pp. 2136–2141.
[20] K. Matsushita and T. Murakami, “Nonholonomic equivalent disturbancebased backward motion control of tractor-trailer with virtual steering,”IEEE Trans. Ind. Electron., vol. 55, no. 1, pp. 280–287, Jan. 2008.
[21] D. H. Kim and J. H. Oh, “Globally asymptotically stable tracking con-trol for a trailer system,” J. Robot. Syst., vol. 19, no. 5, pp. 199–205,May 2002.
[22] J. L. Martínez, M. Paz, and A. García-Cerezo, “Path tracking for mobilerobots with a trailer,” in Proc. 15th IFAC World Congr., Barcelona, Spain,2002, p. 865.
[23] J. Morales, J. L. Martínez, A. Mandow, and I. J. Medina, “Virtual steer-ing limitations for reversing an articulated vehicle with off-axle passivetrailers,” in Proc. 35th Annu. Conf. IEEE Ind. Electron., Porto, Portugal,2009, pp. 2385–2390.
[24] K. Yoo and W. Chung, “Pushing motion control of n passive off-hookedtrailers by a car-like mobile robot,” in Proc. IEEE Int. Conf. Robot.Autom., Anchorage, AK, USA, 2010, pp. 4928–4933.
[25] M. Michalek, “Geometrically motivated set-point control strategy forthe standard n-trailer vehicle,” in Proc. IEEE Intelligent Vehicles Symp.,Baden-Baden, Germany, 2011, pp. 138–143.
[26] J. I. Roh and W. Chung, “Reversing control of a car with a trailer usingthe driver assistance system,” Int. J. Adv. Robot. Syst., vol. 8, no. 2,pp. 114–121, 2011.
[27] M. Michalek, “Application of the VFO method to set-point control forthe n-trailer vehicle with off-axle hitching,” Int. J. Control, vol. 85, no. 5,pp. 502–521, May 2012.
[28] J. L. Martínez, J. Morales, A. Mandow, and A. García-Cerezo, “Steeringlimitations for a vehicle pulling passive trailers,” IEEE Trans. ControlSyst. Technol., vol. 16, no. 4, pp. 809–818, Jul. 2008.
[29] J. A. Nelder and R. Mead, “A simplex method for function minimization,”Comput. J., vol. 7, no. 4, pp. 308–313, 1965.
[30] J. L. Martínez, A. Mandow, J. Morales, S. Pedraza, and A. García-Cerezo,“Approximating kinematics for tracked mobile robots,” Int. J. Robot. Res.,vol. 24, no. 10, pp. 867–878, Oct. 2005.
[31] J. L. Martínez, J. González, J. Morales, A. Mandow, andA. García-Cerezo, “Mobile robot motion estimation by 2D scanmatching with genetic and iterative closest point algorithms,” J. FieldRobot., vol. 23, no. 1, pp. 21–34, Jan. 2006.
[32] J. H. Lee, W. Chung, M. Kim, and J. B. Song, “A passive multiple trailersystem with off-axle hitching,” Int. J. Control, Autom. Syst., vol. 2, no. 3,pp. 289–297, Sep. 2004.
[33] O. Amidi, “Integrated mobile robot control,” Robot. Inst., CarnegieMellon Univ., Pittsburgh, PA, USA, Tech. Rep. CMU-RI-TR-90-17, 1990.
[34] J. Morales, J. L. Martínez, M. A. Martínez, and A. Mandow, “Pure-pursuit reactive path tracking for non-holonomic mobile robots with a 2Dlaser-scanner,” EURASIP J. Adv. Signal Process., vol. 2009, pp. 1–10,Jan. 2009.
[35] F. Cuesta, F. Gómez-Bravo, and A. Ollero, “Parking maneuvers ofindustrial-like electrical vehicles with and without trailer,” IEEE Trans.Ind. Electron., vol. 51, no. 2, pp. 257–269, Apr. 2004.
[36] Y. Yamaguchi and T. Murakami, “Adaptive control for virtual steeringcharacteristics on electric vehicle using steer-by-wire system,” IEEETrans. Ind. Electron., vol. 56, no. 5, pp. 1585–1594, May 2009.
[37] J. Morales, A. Mandow, J. L. Martínez, and A. García-Cerezo, “Driver as-sistance system for backward maneuvers in passive multi-trailer vehicles,”in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst., Vilamoura, Portugal,2012, pp. 4853–4858.

5736 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 60, NO. 12, DECEMBER 2013
Jesús Morales received the M.Sc. degree in electri-cal engineering and the Ph.D. degree with Europeanmention from the University of Málaga, Málaga,Spain, in 2001 and 2007, respectively.
In 2002, he joined the Department of SystemsEngineering and Automation, University of Málaga,where he is currently an Assistant Professor with theEngineering School. His current research interestsinclude mobile robotics applications.
Jorge L. Martínez (M’11) received the Ph.D. degreein computer science from the University of Málaga,Málaga, Spain, in 1994.
Since 1998, he has been an Associate Profes-sor with the Department of Systems Engineeringand Automation, University of Málaga. He hascoauthored numerous scientific papers on differ-ent aspects of mobile robotics derived from hiscollaboration on many research projects.
Anthony Mandow (M’08) received the M.Eng. andPh.D. degrees in computer systems from the Univer-sity of Málaga, Málaga, Spain, in 1992 and 1998,respectively.
Currently, he is an Associate Professor with theDepartment of Systems Engineering and Automa-tion, University of Málaga. He has been engagedin several robotics and automation projects. He hasauthored or coauthored more than 50 conference andjournal papers. His current research interests includefield robotics, robot learning, 3-D perception, and
vehicle motion control.Dr. Mandow is a member of the Comité Español de Automática. He was the
Organizing Chair of the 2009 IEEE International Conference on Mechatronics.He has served as a Guest Associate Editor of the IEEE TRANSACTIONS ON
INDUSTRIAL ELECTRONICS.
Alfonso J. García-Cerezo (M’94) received theInd.Electr.Eng. and Doctoral Eng. degrees from theEscuela Tecnica Superior de Ingenieros Industrialesde Vigo, Vigo, Spain, in 1983 and 1987, respectively.
From 1983 to 1988, he was an Associate Profes-sor with the Department of Electrical Engineering,Computers, and Systems, University of Santiago deCompostela, Santiago de Compostela, Spain, wherehe was an Assistant Professor from 1988 to 1991.Since 1992, he has been a Professor of systemengineering and automation with the University of
Málaga, Málaga, Spain, where he was the Head of the Escuela Técnica Superiorde Ingenieros Industriales de Málaga from 1993 to 2004, is currently theHead of the Department of Systems Engineering and Automation, and is alsoresponsible for the Instituto de Automática Avanzada y Robótica de Andalucía.He has authored or coauthored about 150 journal articles, conference papers,book chapters, and technical reports. His current research interests includemobile robots and autonomous vehicles, surgical robotics, and mechatronicsand intelligent control. He has also been involved in more than 15 researchprojects over the past ten years.
Prof. García-Cerezo is a member of the International Federation of Auto-matic Control, the Spanish Production Technology Automation and RoboticsAssociation, and the Comité Español de Automática. He was the General Chairof the 2009 IEEE International Conference of Mechatronics. Since September2008, he has been a Coordinator of the Spanish Thematic Group of Robotics.
View publication statsView publication stats

![Home [] · Testimonials Trailer Delivery Horse Trailer Blog Horse Trailer Buying Guide Horse Trailer Lingo Horse Trailer Maintenance Trailering Safety Search Inventory OR enter Trailer#:](https://static.fdocuments.in/doc/165x107/5f60b857e51db4230831ff65/home-testimonials-trailer-delivery-horse-trailer-blog-horse-trailer-buying-guide.jpg)
















