![Decoding by Linear Programming - Stanford Universitystatweb.stanford.edu/~candes/papers/DecodingLP.pdf · Decoding by Linear Programming Emmanuel Candes† and Terence Tao] † Applied](https://static.fdocuments.in/doc/165x107/5b9bf27909d3f272468bbd18/decoding-by-linear-programming-stanford-candespapersdecodinglppdf-decoding.jpg)
Stats 330: An Introduction to Compressed...
27
Agenda Nesterov’s method for the minimization of nonsmooth functions 1 Smoothing 2 Conjugate functions 3 Properties of conjugate functions 4 Smoothing by conjugation 5 Nesterov 2005 algorithm 6 Examples
Transcript of Stats 330: An Introduction to Compressed...
Agenda
Nesterov’s method for the minimization of nonsmooth functions
1 Smoothing2 Conjugate functions3 Properties of conjugate functions4 Smoothing by conjugation5 Nesterov 2005 algorithm6 Examples
Nonsmooth optimization
minimize f(x)subject to x 2 C (can be Rn
)
f cvx, dom(f) = Rn
f not di↵erentiable

Examples
minimize kxk1subject to Ax = b
minimize kxkTV
subject to kx� bk2 �
minimize kAx� bk1
Objectives are not smooth

Motivation
f cvx with Lipschitz gradient,
O(
pL/✏)
iterations for ✏ approximation
f cvx and Lipshitz with cst. G,
O(G2/✏2)
iterations via method of subgradients for ✏ approximation
This lecture: speed up convergence for nonsmooth functions
Build smooth approximation fµ to objective functional
Minimize smooth approximation
Example: smoothed `
1
norm
Huber function
hµ(t) =
(t2/2µ |t| µ
|t|� µ/2 |t| � µrhµ(t) =
(t/µ |t| µ
sgn(t) |t| � µ
hµ approximates |t|hµ(t) |t| hµ(t) + µ/2
h0µ is Lipschitz with constant 1/µ
Smooth approximation of `1 norm: fµ(x) =P
i hµ(xi)
fµ(x) kxk`1 fµ(x) + µn/2
Basic idea
Get an ✏/2 approximation of
minimize fµ(x)subject to x 2 C
with
O⇣r
1
µ✏
⌘
iterations. Then
f(xk)� f? fµ(xk) + µn/2� fµ(x?) ✏/2 + µn/2
Set µn = ✏ and cost is
O⇣pn
✏
⌘
at most
References
Y. Nesterov. Smooth minimization of non-smooth functions, Math.
Program., Serie A, 103 (2005)
L. Vandenberghe. Lecture Notes for EE 236C, UCLA
S. Becker, E. Candes, and M. Grant. Templates for convex cone problemswith applications to sparse signal recovery. Mathematical Programming
Computation 3.3 (2011): 165–218.

Strongly convex functions
f is strongly cvx with parameter µ if for all x, y and all � 2 [0, 1]
f((1� �)x+ �y) (1� �)f(x) + �f(y)� µ�(1� �)
2
kx� yk2
For di↵erentiable functions, equivalent to
f(x) � f(y) + hrf(y), x� yi+ µ
2
kx� yk2 8x, y
For C2 functions, equivalent to
r2f(x) ⌫ µI 8x
A strongly cvx function has a unique minimizer

Conjugate of strongly convex functions
DefinitionConjugate of cvx f
f⇤(x) = sup
u2dom(f)hu, xi � f(u)
Lemma (Properties of conjugate of strongly convex functions)
Assume dom(f) cvx and closed
f⇤is well defined and di↵erentiable:
rf⇤(x) = u?
= arg max hu, xi � f(u)
rf⇤is Lipshitz and obeys
krf⇤(x)�rf⇤
(y)k2 µ�1kx� yk2

Proof. First,
f⇤(x+ h) = sup
u{hu, x+ hi � f(u)} � f⇤
(x) + hu?, hi
Second, we claim that because of strong convexity, h(u) = f(u)� hu, xi obeys
h(u) � h(u?) +
µ
2
ku� u?k2
(Easy to check if f is di↵erentiable.) Therefore,
f⇤(x+ h) = sup
u{hu, x+ hi � f(u)} f⇤
(x) + sup
u{hu, hi � µ
2
ku� u?k2}
= f⇤(x) + hu?, hi+ sup
v{hv, hi � µ
2
kvk2}
= f⇤(x) + hu?, hi+ 1
2µkhk22
Conclusion:
f⇤ is di↵erentiable and rf⇤(x) = u?
Lipschitz constant is at most 1/µ
For second claim, assume f di↵erentiable. Optimality conditions
rf(u) = x, rf(v) = y
Then
f(v) � f(u) + hx, v � ui+ µ
2
ku� vk2
f(u) � f(v) + hy, u� vi+ µ
2
ku� vk2
This givesµku� vk2 hx� y, u� vi kx� yk ku� vk
which is the claim.
One can use a density argument in the case f not di↵erentiable
Proximity function
Definitiond is a prox function for closed cvx set C if
d is continuous on Cd is strongly cvx on C
Assume d normalized, µ = 1 and infC d(x) = 0, so that
d(x) � 1
2
kx� xck2
xc is prox-center
Examples of prox functions
d(x) = 12kx� xck22, xc 2 C
d(x) = 12
Pi wi(xi � xc,i)
2, wi � 1 and xc 2 Cd(x) =
Pi xi log xi + log n, C = {x : x � 0 and
Pi xi = 1}
d(X) =
12kX �Xck2F , Xc 2 C

Smoothing by conjugation
Suppose that f can be written as
f(x) = sup
u2dom(g)hu, xi � g(u) = g⇤(x)
Smooth approximation
fµ(x) = sup
u2dom(g)hu, xi � (g(u) + µd(u)) = (g + µd)⇤(x)
rfµ is Lipschitz with constant at most µ�1
if dom(g) bdd and D = supu2dom(g) d(u)
fµ(x) f(x) fµ(x) + µD
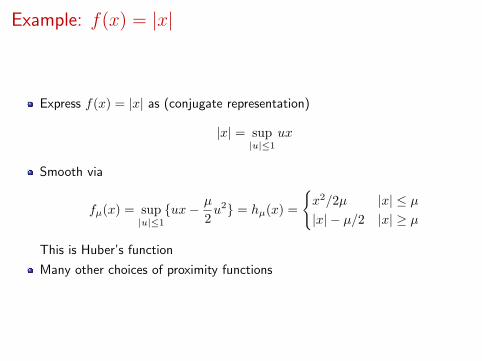
Example: f(x) = |x|
Express f(x) = |x| as (conjugate representation)
|x| = sup
|u|1ux
Smooth via
fµ(x) = sup
|u|1{ux� µ
2
u2} = hµ(x) =
(x2/2µ |x| µ
|x|� µ/2 |x| � µ
This is Huber’s function
Many other choices of proximity functions

Other representation
Express f(x) = |x| as (conjugate representation)
|x| = sup(u1 � u2)x u1, u2 � 0, u1 + u2 = 1
Proxd(u) = u1 log u1 + u2 log u2 + log 2
Smooth approximation
hµ(x) = µ log[cosh(x/µ)]

Smoothing norms
Pair of primal/dual norms f(x) = kxk = supkuk⇤1 hu, xi
fµ(x) = sup
kuk⇤1hu, xi � µd(u)
With `1 norm and d(u) = 12kuk22
fµ(x) = sup
kuk11hu, xi � µd(u) =
X
i
hµ(xi)
Suppose f(x) =P
i |xi � xi�1| = kDxk1, then
f(x) = sup
kuk11hD⇤u, xi
and smooth approximation
fµ(x) = sup
kuk11hD⇤u, xi � µd(u)

Complexity analysis
Want to find solution to nonsmooth problem with accuracy ✏
1 Construct smooth approximation such that
fµ(x) f(x) fµ(x) + µD
which givesf(x)� f? fµ(x)� f⇤
µ + µD
(rfµ is Lipschitz constant at most µ�1)2 Choose µ s.t. µD = ✏/2
3 Minimize fµ with accuracy ✏/2
Solution is ✏ accurate and number of iterations is
O⇣r
1
µ✏
⌘= O
⇣pD
✏
⌘
This is much better than O(1/✏2)

Example 1: Chebyshev approximation
minimize kAx� bk1A 2 Rm⇥n, b 2 Rm
Conjugate representation
f(x) = sup
(u,v)2Qhu� v,Ax� bi
Q = {(u, v) : u � 0, v � 0, 1Tu+ 1
T v = 1}Prox
d(u, v) =X
i
ui log ui +
X
i
vi log vi + log 2m
Smooth approximation: fµ(x) = sup(u,v)2Q{hu� v,Ax� bi � µd(u, v)}
fµ(x) = µ
mX
i=1
log
hcosh
⇣aTi x� biµ
⌘i
Accuracyfµ(x) f(x) fµ(x) + µ log 2m
E�cient Chebyshev approximation

Example 2: Robust regression
minimize kAx� bk1A 2 Rm⇥n, b 2 Rm
Conjugate representation
f(x) = sup
kuk11hu,Ax� bi
Prox
d(u) =1
2
kuk22Smooth approximation
fµ(x) = sup
kuk11{hu,Ax� bi � µkuk22} =
mX
i=1
hµ(aTi x� bi)
hµ is the Huber penalty function

Example 3: nuclear-norm minimization
minimize kXk⇤subject to A(X) = b
Conjugate representation
kXk⇤ =
X
i
�i(X) = sup
kUk1hU,Xi
Prox
d(U) =
1
2
kUk2FSmooth approximation
fµ(x) = sup
kUk1{hU,Xi � µ
2
kUk2F } =
mX
i=1
hµ(�i(X))
hµ is the Huber penalty function
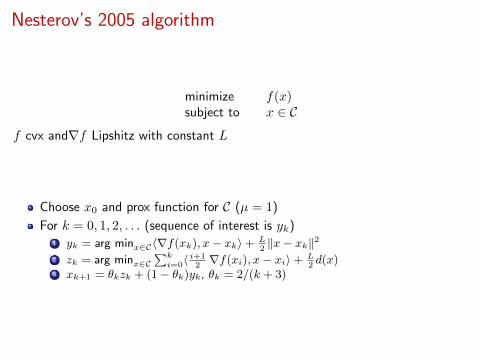
Nesterov’s 2005 algorithm
minimize f(x)subject to x 2 C
f cvx andrf Lipshitz with constant L
Choose x0 and prox function for C (µ = 1)
For k = 0, 1, 2, . . . (sequence of interest is yk)1
y
k
= arg minx2Chrf(x
k
), x� x
k
i+ L
2 kx� x
k
k22
z
k
= arg minx2C
Pk
i=0hi+12 rf(x
i
), x� x
i
i+ L
2 d(x)3
x
k+1 = ✓
k
z
k
+ (1� ✓
k
)yk
, ✓k
= 2/(k + 3)
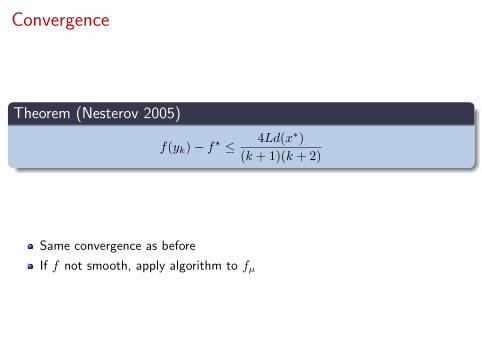
Convergence
Theorem (Nesterov 2005)
f(yk)� f? 4Ld(x⇤)
(k + 1)(k + 2)
Same convergence as before
If f not smooth, apply algorithm to fµ

Case study: total-variation denoising
Modelb = I + z
I is an n⇥ n image
z noise
b is the observed noisy image
Recovery via TV minimization (� is a bound on the noise level)
minimize kxkTV
subject to kx� bk2 �
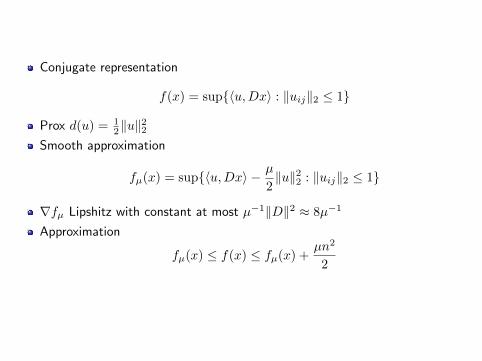
Conjugate representation
f(x) = sup{hu,Dxi : kuijk2 1}
Prox d(u) = 12kuk22
Smooth approximation
fµ(x) = sup{hu,Dxi � µ
2
kuk22 : kuijk2 1}
rfµ Lipshitz with constant at most µ�1kDk2 ⇡ 8µ�1
Approximation
fµ(x) f(x) fµ(x) +µn2
2

Nesterov’s method
minimize kxkTV
subject to kx� bk2 �
Choose x0 and for k = 0, 1, 2, . . . (sequence of interest is yk)1 Compute rfµ(xk) = DTuk
uk = arg max {uTDx� µ
2
kuk22 : kuijk2 1}
2 yk = arg min{hrfµ(xk), x� xki+ Lµ
2 kx� xkk2 : kx� bk2 �}3 zk = arg min {Pk
i=0h i+12 rfµ(xi), x� xii+ Lµ
2 kx� bk2 : kx� bk2 �}4 update xk+1 = ✓kzk + (1� ✓k)yk, ✓k = 2/(k + 3)
After change of variables, each step is of the form
minimize 12kxk22 � cTx subject to kxk2 t
with solution given bymin(1, t/kck2) c

Possible stopping criterion
Stop when PD gap less than a tol.
Dual problemminimize ��kDTuk2 + hb,DTuisubject to kuijk2 1
Duality gapkxk
TV
+ �kDTuk2 � hb,DTui


















