Statistical Models for Stream Ecology Data: Random Effects Graphical Models
29
Statistical Models for Stream Ecology Data: Random Effects Graphical Models Devin S. Johnson Jennifer A. Hoeting STARMAP Department of Statistics Colorado State University
description
Statistical Models for Stream Ecology Data: Random Effects Graphical Models. Devin S. Johnson Jennifer A. Hoeting STARMAP Department of Statistics Colorado State University. # CR - 829095. - PowerPoint PPT Presentation
Transcript of Statistical Models for Stream Ecology Data: Random Effects Graphical Models

Statistical Models for Stream Ecology Data:Random Effects Graphical Models
Devin S. JohnsonJennifer A. Hoeting
STARMAPDepartment of Statistics
Colorado State University

The work reported here was developed under the STAR Research Assistance Agreement CR-829095 awarded by the U.S. Environmental Protection Agency (EPA) to Colorado State University. This presentation has not been formally reviewed by EPA. The views expressed here are solely those of presenter and the STARMAP, the Program he represents. EPA does not endorse any products or commercial services mentioned in this presentation.
# CR - 829095

Motivating Problem
• Various stream sites in the Mid-Atlantic region of the United States were visited in Summer 1994.– For each site, each observed fish species was cross
categorized according to several traits– Environmental variables are also measured at each
site (e.g. precipitation, chloride concentration,…)
• Relative proportions are more informative.
• How can we determine if collected environmental variables affect species richness compositions (which ones)?

Outline
• Introduction– Compositional data– Probability models
• Brief introduction to chain graphs
• A graphical model for compositional data– Modeling individual probabilities– Markov properties of random effects graphical models
• Analysis of fish species richness compositional data
• Conclusions and Future Research

Discrete Compositions and Probability Models
• Compositional data are multivariate observations
Z = (Z1,…,ZD) subject to the constraints that iZi = 1 and Zi 0.
• Compositional data are usually modeled with the Logistic-Normal distribution (Aitchison 1986).– Scale and location parameters provide a large
amount of flexibility compared to the Dirichlet model– LN model defined for positive compositions only
• Problem: With discrete counts one has a non-trivial probability of observing 0 individuals in a particular category

Existing Compositional Data Models
• Billhiemer and Guttorp (2001) proposed using a multinomial state-space model for a single composition,
where Yij is the number of individuals belonging to category j = 1,…,D at site i = 1,…,S.
Limitations: – Models proportions of a single categorical variable. – Abstract interpretation of included covariate effects
1 1
1
;i iD i i iD
i iD i i
C ,...,C ~ N Z ,...,Z
Z ,...,Z ~ , ,μ Σ
multinomial
LN

Existing Graphical Models
• Graph model theory (see Lauritzen 1996) has been used for many years to– model cell probabilities for high dimensional
contingency tables– determine dependence relationships among
categorical and continuous variables
Limitation: – Graphical models are designed for a single sample
(or site in the case of the Oregon stream data). Compositional data may arise at many sites

New Improvements for Compositional Data Models
• The Billhiemer and Guttorp model can be generalized by the application of graphical model theory.– Generalized models can be applied to cross-classified
compositions– Simple interpretation of covariate effects as a variable
in a Markov random field
• Conversely, graphical model theory can be expanded to include models for multiple site sampling schemes

Chain Graphs
• Mathematical graphs are used to illustrate complex dependence relationships in a multivariate distribution.
• A random vector is represented as a set of vertices, V .
• Pairs of vertices are connected by directed edges if a causal relationship is assumed, undirected if the relationship is mutual

Probability Model for Individuals (Unobserved Composition)
• Response variables– Set of discrete categorical variables – Notation: y is a specific cell
• Explanatory variables – Set of categorical () and/or continuous ()
variables– Notation: x refers to a specific explanatory
observation• Random effects
– Allows flexibility when sampling many “sites”– Unobserved covariates
– Notation: f, f refers to a random effect.

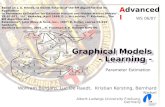
Probability Model and Extended Chain Graph, G
• Joint distributionf (y, x, ) = f (y|x, ) f (x) f ()
• Graph illustrating possible dependence relationships for the full model, G.
X1
X2 Y2
Y1
{1,2}
2
1

Random Effects Discrete Regression Model(REDR)
• Sampling of individuals occurs at many different random sites, i = 1,…,S, where covariates are measured only once per site
• Hierarchical model for individual probabilities:
REDR
2
exp fcdf c d c
Mm
f dm ff d m f
f | , , x
, x
y x x ε y x
y x y
1f f~ MVN , , f ε 0 T

Random Effects Discrete Regression Model(REDR)
Response parameters constraints:
• The function (x,) is a normalizing constant w.r.t. y|(x,), and therefore, is not a function of y.
• The parameters fcd(y, x), fdm(y, x), and f (y) are interaction effects that depend on y and x through the levels of the variables in f and d only.
• Interaction parameters (and random effects) are set to zero for identifiability of the model if the cells y or x are indexed by the first level of any variable in f or d

Random Effects Discrete Regression Model(REDR)
• Model for explanatory variables (CG distribution):
• Again, interactions depend on x through the levels of the variables in the set d only, and identifiability constraints are imposed.
1exp d dd d
f f f
MVN ,
x x x x
x x Ψ

Graphical Models for Discrete Compositions
• Sampling many individuals at a site results in cell counts,
C(y)i = # individuals in cell y at site i.
• Conditional count likelihood
[C(y)i]y | xi, Ni ~ multinomial(Ni; [fRE(y|xi, i)]y ),
or
C(y)i | xi ~ indep. Poisson((xi) fRE(y|xi, i) )
• Joint covariate count likelihood
multinomial(Ni; [fRE(y|xi, i)]y ) CG(, , Ø)

Markov Properties of Chain Graph Models
• Let P denote a probability measure on the product space
X = ∏V X
• Markov (Global) property
The probability measure P is Markovian with respect to a chain graph G if for any triple (A, B, S) of disjoint sets in V, such that S separates A from B in {Gan(ABS)}m, we have
A B | S.
• There are two weaker Markov properties, pairwise and local Markov properties.

Markov Properties of the REDR Model
Proposition 1. A REDR model is G Markovian if and only if the following six constraints are satisfied for a given extended graph G
Response model
1 fcd(y, x) = 0 unless f c d is completefor
c d ≠ Ø
2 fdm(y , x) = 0 for m = 1,…,M, unless f {} d is complete, where {} and d .
3 f (y) = -f ØØ (y) with probability 1 if f is not complete.

Markov Properties of the REDR Model
Proposition 1. A REDR model is G Markovian if and only if the following six constraints are satisfied for a given extended graph G
Covariate model
4 d(xd) = 0 unless d is complete
5 d(xd) = 0 unless {} c is complete, where {} and d
6 .= 0 unless {, } is complete, where , and is the (, ) element of Ø.

Markov Properties of the REDR Model
Sketch of proof• Lauritzen and Wermuth (1989) prove conditions
concerning the , , and Ø parameters for the CG distribution.
• If the and parameters are 0 for the specified sets then the density factorizes according to Frydenburg’s (1990) theorem.
• A modified version of the proof of the Hammersley-Clifford Theorem shows that if f (y|x, ) separates into complete factors, then, the corresponding and vectors for non-complete sets must be 0.

Preservative REDR Models
Preservative REDR models are defined by the following conditions:
1. All connected components aq, q = 1,…,Q, of in G are complete, where Q is the total number of connected components.
1. Any that is a parent of aq is also a parent of every other aq, q = 1,…,Q.

Markov Properties of the REDR Model
Proposition 2. If P is a preservative REDR model, and P is G Markovian, then the marginal distribution, P of the covariates and response variables is G = (G) Markovian.
Sketch of Proof.
The integrated REDR density follows Frydenberg’s (1990) factorization criterion. The factor functions, however, do not exist in closed form.

Parameter Estimation
• A Gibbs sampling approach is used for parameter estimation
• Hierarchical centering – Produces Gibbs samplers which converge to the
posterior distributions faster– Most parameters have standard full conditionals if
given conditional conjugate distributions.
• Independent priors imply that covariate and response models can be analyzed with separate MCMC procedures.

Fish Species Richness in the Mid-Atlantic Highlands
• 91 stream sites in the Mid Atlantic region of the United States were visited in an EPA EMAP study
• Response composition
Observed fish species were cross-categorized according to 2 discrete variables:
1. Habit
• Column species
• Benthic species
2. Pollution tolerance
• Intolerant
• Intermediate
• Tolerant

Stream Covariates
• Environmental covariates
Values were measured at each site for the following covariates
1. Mean watershed precipitation (m)
2. Minimum watershed elevation (m)
3. Turbidity (ln NTU)
4. Chloride concentration (ln eq/L)
5. Sulfate concentration (ln eq/L)
6. Watershed area (ln km2)

Fish Species Richness Model
• Composition Graphical Model
and
• Prior distributions
6
1
1
expiRE i i i i i f i i f i
f f
f | , , x x s
y x ε x ε y y
2iid 0 ; 0 6 f ~ N , γ ,..., , f
y
Wishf f~ ,T R Wish 6~ , Ψ R
1fi f~ MVN , ε 0 T
1i ~ MVN ,
x μ Ψ

Model Selection
Three different models are considered
1. Independent response
(i.e. f(yi) = f (yi) = 0 for f = {H, T })
2. Depended response w/ independent errors
3. Dependent response w/ correlated errors
(equivalent to Billheimer Guttorp model)
Model DIC DIC pD
Independent 1107.7 -- 68.7
Dependent (indep. errors) 1117.8 10.1 106.1
Dependent (corr. errors) 1166.8 59.1 162.5

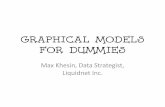
Fish Species Functional Groups
Edge exclusion determined from 95% HPD intervals for parameters and off-diagonal elements of Ø
Posterior suggested chain graph for independence model (lowest DIC model)
Tolerance
Precipitation
Chloride
Elevation
Turbidity
Area
SulfateHabit

Comments and Conclusions
• Using Discrete Response model with random effects, the Billheimer-Guttorp model can be generalized– Relationships evaluated though a graphical model– Multi-way compositions can be analyzed with
specified dependence structure between cells– MVN random effects imply that the cell probabilities
have a constrained LN distribution
• DR models also extend the capabilities of graphical models– Data can be analyzed from many multiple sites– Over dispersion in cell counts can be added

Future Work
• Model determination under a Bayesian framework– Models involve regression coefficients as well as
many random effects– Initial investigation suggests selection based on
exclusion/inclusion of parameters not edges produces models with higher posterior mass
• Accounting for spatial correlation