Stability, Bifurcation, and Quenching Chaos of a Vehicle...
13
Research Article Stability, Bifurcation, and Quenching Chaos of a Vehicle Suspension System Chun-Cheng Chen 1 and Shun-Chang Chang 2 1 Graduate School of Technological and Vocational Education, National Yunlin University of Science and Technology, Yunlin 64002, Taiwan 2 Department of Mechanical and Automation Engineering, Da-Yeh University, Changhua 51591, Taiwan Correspondence should be addressed to Shun-Chang Chang; [email protected] Received 16 October 2017; Revised 28 January 2018; Accepted 20 February 2018; Published 27 March 2018 Academic Editor: David F. Llorca Copyright © 2018 Chun-Cheng Chen and Shun-Chang Chang. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. is study investigated the dynamics and control of a nonlinear suspension system using a quarter-car model that is forced by the road profile. Bifurcation analysis used to characterize nonlinear dynamic behavior revealed codimension-two bifurcation and homoclinic orbits. e nonlinear dynamics were determined using bifurcation diagrams, phase portraits, Poincar´ e maps, frequency spectra, and Lyapunov exponents. e Lyapunov exponent was used to identify the onset of chaotic motion. Finally, state feedback control was used to prevent chaotic motion. e effectiveness of the proposed control method was determined via numerical simulations. 1. Introduction e suspension system of vehicles is meant to isolate the vehicle body and passengers from oscillations imposed by road irregularities and maintain continuous contact between the tires and surface of the road. Suspension systems provide a smoother ride and help the operator to maintain control of the vehicle over rough terrain or during sudden stops [1]. Hysteresis is an important aspect of suspension design, and the development of smart materials for vehicle suspension systems with hysteretic damping has been the subject of considerable studies [2–5]. e fact that the damping force in a vehicle’s suspension system is hysteretic means that road excitation can be modeled as a multifrequency harmonic function. erefore, automotive suspension systems may be considered a nonlinear hysteretic system with multifre- quency excitation. Nonlinear phenomena of codimension bifurcations have been studied extensively, particularly in engineering systems [6–8]. Tseng and Tung [9] examined the bifurcation behavior of a nonlinear structure with a magnetic actuator. Yagasaki [10] investigated nonlinear dynamics and the bifurcation behavior of a pendulum with feedback control. Tian et al. [11] studied the complex nonlinear dynamics of smooth, discontinuous oscillators. Numerous methods have been proposed for nonlinear control. Yin et al. [12] applied an approximated adaptive fuzzy control method to a nonlinear strict-feedback system with unmodeled dynamics. And, Yin et al. [13] developed a fault-tolerant controller based on the adaptive neural network backstepping technique for time- varying delay systems with unmodeled dynamics. e fact that hysteresis is not a smooth process renders the characteristics of a suspension system with hysteretic damping inherently nonlinear. is can greatly complicate the design of a controller. Accurately predicting and/or con- trolling the performance of a system require that the effects of nonlinear phenomena be taken into account. e problem of rough road profiles and unwanted vehicle vibrations produced by kinematic excitation make it necessary to form accurate predictions of dynamic behavior over a range of operating conditions in the design of suspension systems. Bifurcation and chaos are crucial concepts in the study of stability in nonlinear systems, and numerous researchers have addressed issues pertaining to nonlinear dynamics in suspension systems [14–17] as well as chaotic responses in nonlinear air suspension systems [18, 19]. However, the Hindawi Journal of Advanced Transportation Volume 2018, Article ID 4218175, 12 pages https://doi.org/10.1155/2018/4218175
Transcript of Stability, Bifurcation, and Quenching Chaos of a Vehicle...

Research ArticleStability Bifurcation and Quenching Chaos ofa Vehicle Suspension System
Chun-Cheng Chen1 and Shun-Chang Chang 2
1Graduate School of Technological and Vocational Education National Yunlin University of Science and TechnologyYunlin 64002 Taiwan2Department of Mechanical and Automation Engineering Da-Yeh University Changhua 51591 Taiwan
Correspondence should be addressed to Shun-Chang Chang changscmaildyuedutw
Received 16 October 2017 Revised 28 January 2018 Accepted 20 February 2018 Published 27 March 2018
Academic Editor David F Llorca
Copyright copy 2018 Chun-Cheng Chen and Shun-Chang Chang This is an open access article distributed under the CreativeCommons Attribution License which permits unrestricted use distribution and reproduction in any medium provided theoriginal work is properly cited
This study investigated the dynamics and control of a nonlinear suspension system using a quarter-car model that is forced bythe road profile Bifurcation analysis used to characterize nonlinear dynamic behavior revealed codimension-two bifurcation andhomoclinic orbitsThe nonlinear dynamics were determined using bifurcation diagrams phase portraits Poincare maps frequencyspectra and Lyapunov exponents The Lyapunov exponent was used to identify the onset of chaotic motion Finally state feedbackcontrol was used to prevent chaotic motion The effectiveness of the proposed control method was determined via numericalsimulations
1 Introduction
The suspension system of vehicles is meant to isolate thevehicle body and passengers from oscillations imposed byroad irregularities and maintain continuous contact betweenthe tires and surface of the road Suspension systems providea smoother ride and help the operator to maintain controlof the vehicle over rough terrain or during sudden stops [1]Hysteresis is an important aspect of suspension design andthe development of smart materials for vehicle suspensionsystems with hysteretic damping has been the subject ofconsiderable studies [2ndash5] The fact that the damping forcein a vehiclersquos suspension system is hysteretic means that roadexcitation can be modeled as a multifrequency harmonicfunction Therefore automotive suspension systems may beconsidered a nonlinear hysteretic system with multifre-quency excitation
Nonlinear phenomena of codimension bifurcations havebeen studied extensively particularly in engineering systems[6ndash8] Tseng and Tung [9] examined the bifurcation behaviorof a nonlinear structure with a magnetic actuator Yagasaki[10] investigated nonlinear dynamics and the bifurcationbehavior of a pendulum with feedback control Tian et al
[11] studied the complex nonlinear dynamics of smoothdiscontinuous oscillators Numerous methods have beenproposed for nonlinear control Yin et al [12] applied anapproximated adaptive fuzzy control method to a nonlinearstrict-feedback system with unmodeled dynamics And Yinet al [13] developed a fault-tolerant controller based on theadaptive neural network backstepping technique for time-varying delay systems with unmodeled dynamics
The fact that hysteresis is not a smooth process rendersthe characteristics of a suspension system with hystereticdamping inherently nonlinear This can greatly complicatethe design of a controller Accurately predicting andor con-trolling the performance of a system require that the effectsof nonlinear phenomena be taken into accountThe problemof rough road profiles and unwanted vehicle vibrationsproduced by kinematic excitation make it necessary to formaccurate predictions of dynamic behavior over a range ofoperating conditions in the design of suspension systemsBifurcation and chaos are crucial concepts in the study ofstability in nonlinear systems and numerous researchershave addressed issues pertaining to nonlinear dynamics insuspension systems [14ndash17] as well as chaotic responsesin nonlinear air suspension systems [18 19] However the
HindawiJournal of Advanced TransportationVolume 2018 Article ID 4218175 12 pageshttpsdoiorg10115520184218175
2 Journal of Advanced Transportation
issue of codimension bifurcations has largely been over-looked
In this study we examined a suspension system present-ing codimension-two bifurcation andhomoclinic orbits bothof which determine the nature of the dynamic behavior andthe existence of strange attractors We sought to calculatethe strange attractor using numerical simulation in whichexternal forces from a road profile are added to the systemas a parameter with a specific range of values We employedbifurcation diagrams phase portraits Poincare maps fre-quency spectra and Lyapunov exponents to explain periodicand chaotic motions in a vehicle suspension system thatexerts hysteretic nonlinear damping forces Algorithms thatcomputes Lyapunov exponents for smooth dynamic systems[20] were used to determine whether the system exhibitschaotic motion
Chaotic behavior is normally considered undesirable dueto the restrictions it imposes on the operating range of electri-cal and mechanical devices Many engineering problems canonly be resolved by driving a chaotic attractor in a periodicorbit Numerousmethods have been proposed for the controlof chaos [21ndash23] including suspension systems [15 24 25] Inthis study we adopted the simple control method proposedby Cai et al [26] in which state feedback is used to convertchaotic motion into stable motion Numerical simulationsdemonstrate the feasibility of the proposed approach
This paper is organized as follows Section 2 describesthe proposed vehicle suspension system using a quarter-car model under kinematic excitation by a road surfaceprofile Section 3 outlines the local bifurcation analysis usedto identify codimension-two bifurcation and homoclinicorbits Section 4 elucidates the complex dynamic behaviorin the suspension system using numerical analysis such asa bifurcation diagrams phase portraits Poincare maps andfrequency spectra Section 5 presents the Lyapunov exponentused to determine whether the system exhibits chaoticmotion A state feedback control technique for controllingchaos in the suspension system is presented in Section 6Conclusions are drawn in Section 7
2 Formulation of Problem
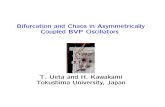
Figure 1 presents quarter-car model with a single degree-of-freedom and hysteretic nonlinear damping The equation ofmotion for the system was formulated by Li et al [14]
119898 + 1198961 (119909 minus 1199090) + 119865ℎ = 0 (1)
where 119865ℎ is an additional nonlinear hysteretic suspensiondamping and stiffness force which is dependent on therelative displacement and velocity
119865ℎ = 1198962 (119909 minus 1199090)3 + 1198621 ( minus 0) + 1198622 ( minus 0)3 1199090 = 119886 sin (Ω119905) (2)
In defining the relative vertical displacement as 119910 = 119909 minus 1199090(1) can be written as follows
119910 + 1205962119910 + 11986111199103 + 1198612 119910 + 1198613 1199103 = 119860 sin (Ω119905) (3)
mg
x
x0 = a MCHΩt
Mass
Figure 1 Schematic diagram of the quarter-car model
Table 1 Nomenclature and parameters
Notation Value Unit Description119898 240 kg The body mass1198961 16 times 104 Nm The suspension stiffness coefficient
1198962 30 times 104 Nm3 The nonlinear hysteretic suspensionstiffness coefficient
1198621 250 Nsm The linear damping coefficient
1198622 minus25 Ns3m3 The nonlinear hysteretic suspensionviscous damping coefficient
119886 005 m The amplitude of road excitation1199090 m The road excitation119909 m The bodyrsquos vertical displacementΩ rads The frequency of road excitation
where 1205962 = 1198961119898 1198611 = 1198962119898 1198612 = 1198621119898 1198613 = 1198622119898119860 = 119886Ω2The states are chosen such that 1199101 = y 1199102 = 119910 Thus the
state-space model for the suspension system can be writtenas
1199101 = 1199102 (4a)
1199102 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023 (4b)
The amplitude of the road profile excitation is 119886 =0 Table 1 lists the values of the parameters in the aboveequations which were obtained using the methods outlinedby Li et al [14]
3 Local Codimension-TwoBifurcation Analysis
Our main objective in this analysis is to observe thequalitative behavior of the system and how it changes assystem parameters are varied Changes occurring near theequilibrium point of the system are referred to as localbifurcation The codimension of bifurcation refers to theminimumnumber of parameters that must be varied in orderto observe a specific type of bifurcation [8]
Journal of Advanced Transportation 3
Nonlinear analysis must be based on linear analysisBifurcation analysis is based on the Jacobian matrix in (4a)and (4b) When (1198961 1198881) = (0 0) and the Jacobian matrix hasdouble-zero eigenvalues of the form of [ 0 10 0 ] we have themost degenerate situation (eigenvalues with zero real part)that is a double-zero codimension-two bifurcation problemBifurcation equations can be written as follows
1199101 = 1199102 (5a)
1199102 = minus119861111991013 + higher order terms (5b)
Bifurcation equations (5a) and (5b) take the normal formbecause they are the simplest forms of the equations ofmotion [8 27ndash30]
The blow-up technique is used to checkwhether the cubicterms in (5a) and (5b) determine local behavior The blow-up technique involves a singular change to the coordinatesthat expands degenerate fixed points into circles containinga finite number of fixed points If these fixed points arehyperbolic following the first change in the coordinates thenthe local flow near the circle (and consequently flow near theoriginal fixed point) remains stable with respect to higher-order terms If these fixed points are all degenerate then thecoordinates must be changed again If all of the fixed pointsbecome hyperbolic within a finite number of coordinatechanges then a system with only lower-order terms willexhibit the same qualitative behavior as the overall system [8]The steps used in the blow-up method are as follows
First Blow-Up
1199101 = 119903 cos 120579 (6a)
1199102 = 119903 sin 120579 (6b)
Equations (5a) (5b) and (6a) (6b) become
119903 = 119903 sin 120579 (1 minus 11986111199032cos2120579) + hot (7a)
120579 = minussin2120579 minus 11986111199032cos4120579 + hot (7b)
Stability analysis reveals that the system has two degener-ate equilibrium points (0 0) and (0 120587) which means that theblow-up procedure must be repeated In the case of (0 0) thepower series in normal form is
119903 = 119903120579 + hot (8a)
120579 = minus1205792 minus 11986111199032 + hot (8b)
Second Blow-Up Let
119903 = 120588 sin120601 (9a)
120579 = 120588 cos120601 (9b)
so that (8a) (8b) and (9a) (9b) become
120588 = minus1205882 cos120601 (1198611sin2120601 + cos2120601) + hot (10a)
120601 = 120588 sin120601 (2cos2120601 minus 1198611sin2120601) + hot (10b)
After dividing by the unaffected common component 120588(10a) and (10b) have two hyperbolic fixed points (0 0) and(0 120587) Thus no further blow-up is required
For the other equilibrium point (0 120587) the power seriesin the normal form is the same as the power series used for(8a) and (8b) such that the same results are obtained Thedegenerate field contains cubic terms of the lowest order andunfolding is performed using the two-parameter family asfollows
1199101 = 1199102 (11a)
1199102 = 11987011199101 + 11987021199102 minus 119861111991013 (11b)
where 1198701 = minus1198961119898 1198702 = minus1198881119898 The higher-order terms in(11a) and (11b) are disregarded when applied as an alternativefor (4a) and (4b)
The term ldquobifurcation setrdquo refers to a set in parameterspace on which the system bifurcates It is obtained fromunfolded equations in the normal form
There are three equilibrium points in this case
1 (0 0) for all119870111987022 (plusmnradic11987011198611) for1198701 gt 0
By checking the stability of these equilibrium points weobtain the following
(1) For 1198701 = 0 a subcritical pitchfork bifurcation occurs if1198702 gt 0 and a supercritical pitchfork bifurcation occurs if1198702 lt 0(2) For 1198701 gt 0 and 1198702 = 0 a rescaling technique and Mel-nikovrsquos perturbation method are used to obtain the completebifurcation set associated with homoclinic orbits in theunfolding bifurcation equations (11a) and (11b) [8]
Let 1199101 = 120598119906 1199102 = 1205982V 1198701 = 1205982V1 1198702 = 1205983V2 119905 rarr 120598119905Thus after rescaling (11a) and (11b) are rewritten as
= V (12a)
V = V1119906 + 1205982VV2 minus 11986111199063 (12b)
Melnikovrsquos method is then used to characterize the relation-ship between 1198701 and1198702
After a series of operations the following expression isobtained
1198702 = 0 (13a)
1198701 = 11986111205983 (13b)
Equations (13a) and (13b) yield the homoclinic saddle con-nection referred to as homoclinic bifurcation
(3) For 1198701 lt 0 and 1198702 = 0 the Jacobian matrix in (11a) and(11b) is written as
DF (0 0) = [ 0 11198701 0] (14)
4 Journal of Advanced Transportation
Region (V) Region (I)
Region (III) Region (II)
K2
P+
Pminus
K1SC
Figure 2The bifurcation sets that are associated with typical phaseportraits in each region where 119875+ represents a subcritical pitchfork119875minus represents a supercritical pitchfork and SC represents a homo-clinic bifurcation
The eigenvalues for DF(0 0) are120582 = plusmnradic1198701119894 (15)
For the following change in coordinates
[11991011199102] = [ 0 0minusradic1198701 0] [
119880119881] (16)
Equations (12a) and (12b) become
[] = [ 1198702 minusradic1198701radic1198701 0 ] [119880119881] + [[
[0
11986111198813radic1198701]]] (17)
Let 119892(119880119881) = 11986111198813radic1198701 and 119891(119880119881) = 0Clearly it can be seen that
119891VVV = 0119891V119906119906 = 0119892VV119906 = 0119892119906119906119906 = 0119891119906119906 = 0119891119906V = 0119891VV = 0119892119906119906 = 0119892119906V = 0119892VV = 0
(18)
According to the Hopf bifurcation theorem [8] coeffi-cient a must not equal zero In this case the coefficient aequals zero therefore there is no Hopf bifurcation
Numerical simulations using (4a) and (4b) were per-formed to check the validity of this bifurcation analysisThe parameter space was divided into several regions usingbifurcation sets as shown in Figure 2 The commercial
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2
Velo
city
(ms
)
00100050 0015 002minus001minus0015 minus0005minus002Displacement (m)
Figure 3 Numerical simulation for region (I) for (1198701 1198702) = (002001)
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2Ve
loci
ty (m
s)
minus0015 minus001 minus0005 0 0005 001 0015 002minus002Displacement (m)
Figure 4 Numerical simulation for SC for (1198701 1198702) = (002 00)
package DIVPRK of IMSL in the FORTRAN subroutines formathematics applications was used to solve these ordinarydifferential equations [31] The resulting numerical simu-lations are presented in Figures 3ndash7 The results in eachparametric region are discussed below
Region (I) includes sources and a saddle If the initialconditions are in the neighborhood of the two sources thenthe mass is distant from the equilibrium points (Figure 3)At the boundary between regions (I) and (II) (ie in thebifurcation set SC (1198702 = 0 1198701 gt 0)) the systemis an integrable system with homoclinic orbits (Figure 4)Therefore if the damping term is disregarded then the systemis conservative In region (II) the system is not integrablewith two sinks and one saddle If the initial conditions arein the neighborhood of the saddle then the mass returns tothe two sinks which are stable points as time approachesinfinity (Figure 5) At the boundary between regions (II) and
Journal of Advanced Transportation 5
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2
Velo
city
(ms
)
minus002 minus001 minus0005 0 0005 001 0015 002minus0015Displacement (m)
Figure 5 Numerical simulation for region (II) for (11987011198702) = (002minus001)
minus1
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Velo
city
(ms
)
minus6 minus4 minus2 0 2 4 6 8minus8Displacement (m)
times10minus3
times10minus3
Figure 6 Numerical simulation for region (III) for (1198701 1198702) =(minus002 minus001)
(III) (ie in bifurcation set 119875minus) the two sinks move closerto the saddle as the parameters approach bifurcation set 119875minusand the stability region shrinks to zero In region (III) thetwo sinks disappear and the saddle (0 0) becomes a sinkThis is a supercritical pitchfork bifurcation with an attractingsink region (III) (Figure 6) From regions (III) to (V) theeigenvalues for the Jacobian matrix cross the imaginary axishowever there is no Hopf bifurcation This means that thedynamic behavior is linear which is a similar situation tothat when a stable equilibrium point becomes an unstableequilibrium point (Figure 7) Between region (V) and region(I) boundary 119875+ must be crossed This is called a subcriticalpitchfork bifurcation
In terms of the equilibria and Figure 2 1198701 determinesthe number of equilibrium points and 1198702 determines the
minus002 minus0015 minus001 minus0005 0 0005 001 0015 002Displacement (m)
times10minus3
minus4
minus3
minus2
minus1
0
1
2
3
4
Velo
city
(ms
)
Figure 7 Numerical simulation for region (V) for (1198701 1198702) =(minus002 001)
local behavior (eg stability or instability) and whetherthere are homoclinic orbits Clearly only a positive dampingcoefficient results in a stable system
4 Analytical Tools for Observing NonlinearDynamics in a Vehicle Suspension System
In (3) the amplitude of the road excitation 119886 equals005m We performed a series of numerical simulationsusing (3) to determine the characteristics of this systemDynamic behaviors can be more clearly observed over arange of parameter values in bifurcation diagrams which arewidely used to describe transitions from periodic motion tochaoticmotion in dynamic systemsThe resulting bifurcationdiagram is presented in Figure 8 This figure clearly showschaotic motion in region A Region C presents period-1motion and there is a stable equilibrium point In this regioneach response was characterized using a phase portrait aPoincare map (velocity versus phase angle) and a frequencyspectrum Figure 9 shows that the equilibrium point of thesystem is stable if parameter Ω exists in region C It is well-known that road excitation covers a wide range frequenciesand higher vehicle velocities increase excitation from theroad surface The range of human sensitivity to frequency isfrom 4 to 8Hz (about 2512 rads to 5024 rads) thereforewe limited this investigation to the case of Ω = 400 radsFigure 10 shows the periodic motion in the system in caseswhere the parameter exists in regionC (ieΩ = 82 rads andΩ = 40 rads) The amplitude of road excitation is defined as005m while the response of the system (even in periodicmotion) has an amplitude of near 035m (Figure 9) Clearlythis response is not acceptable When parameter Ω existsin region B quasiperiodic motion occurs in this regionAs shown in Figures 11ndash13 the quasiperiodic trajectoryis restricted to an annular-like region of the state spaceand differs considerably from periodic trajectories When
6 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
Ω (rads)40353025201510
Region C(periodic motion)
(a)
Velo
city
(ms
)
4
2
0
Ω (rads)82582815818058795
Region B(quasiperiodic motion)
Region A(chaotic motion)
Region C(periodic motion)
(quasiperiodic motion) Region C(periodic mo
(b)
Figure 8 Bifurcation diagram for the system when the amplitude of the road excitation 119886 is 005m (a) Ω = 796 rads to 40 rads (b) Ω =796 rads to 825 rads
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
3
28
26
24
22
Phase angle0850807507
(b)
Velo
city
(ms
)
Ω (rads)
3
2
1
020151050
(c)
Figure 9 The period-one orbit at Ω = 82 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
Displacement (m)0080060040020minus002minus004minus006minus008
minus2
minus1
0
1
2
(b)
Figure 10 Phase portrait (a)Ω = 82 rads (b)Ω = 40 rads
Journal of Advanced Transportation 7
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
2
15
1
0
05
20151050
(c)
Figure 11 Quasiperiodic orbit at Ω = 80 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Ω = 80 805 or 815 the system exhibits a quasiperiodicmotion and the map forms a continuous closed orbit in thePoincare section as shown in Figures 11ndash13 As the forcingfrequency (Ω) continues decreasing into regionA (Figure 14)chaotic motion produces chatter vibration The transitionsequence for the system in this paper is from periodic motionto quasiperiodic motion and finally to chaotic motion Theparticular features of these two descriptors characterize thechaotic behavior The Poincare map contains an infinite setof points which are referred to as a strange attractor Thefrequency spectrum of the chaotic motion is a continu-ous broad spectrum The strange attractor and continuousFourier spectrum are strong indicators of chaos Figure 14shows clear indications of chaotic behavior in region AFigures 14(a)ndash14(c) respectively show the phase portraits thePoincare maps and frequency spectra
5 Analysis of Chaotic Phenomena LyapunovExponent and Lyapunov Dimension
The analysis presented in Section 4 is insufficient to confi-dently identify chaotic motion in a suspension system In thissection we adopt Lyapunov exponents to verify the existenceof chaotic motion In every dynamic system the spectrumof Lyapunov exponents (120582) [20] indicates variations in thelengths areas and volumes of the phase space Verifying theexistence of chaos requires calculation of only the largestexponent to indicate whether nearby trajectories diverge
(120582 gt 0) or converge (120582 lt 0) on average Any boundedmotionwithin a system that has at least one positive Lyapunovexponent is defined as chaotic The Lyapunov exponents forperiodic motion are not positive
Figure 15 plots the evolution of the largest Lyapunovexponent in a suspension system This value is computedusing the algorithm presented by Wolf et al [20] Figure 14shows that chaotic motion began at approximately Ω =7965 rads because at point (1198751) the sign of the largestLyapunov exponent changed from negative to positive as theparameterΩ slowly decreased Between points1198751 and1198752 thelargest Lyapunov exponent approached zeroThe existence ofa forcing frequency Ω in these regions denotes the motionin the system as quasiperiodic When the value of Ω isgreater than 1198751 (such as when Ω = 82 rads) the Lyapunovexponents obtained using (3) are 1205821 = minus00010375 and 1205822 =minus00013232The sum of these values is 1205821+1205822 = minus00023607this negative value demonstrates that the motion of massat these values eventually converges to a stable limit cycleUsing the Lyapunov exponents for a dynamical system where1205821 ge sdot sdot sdot ge 120582119899 Kaplan and Yorke [32] provided an estimationof the Lyapunov dimension 119889119871 as follows
119889119871 = 119895 + 110038161003816100381610038161003816120582119895+110038161003816100381610038161003816119895sum119894=1
120582119894 (19)
where 119895 is the largest integer that satisfies sum119895119894=1 120582119894 gt 0This technique yields a Lyapunov dimension of 119889119871 = 1 for
8 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
minus4
minus2
04020minus02minus06 minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
06 07 08 09Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
1
0
05
20151050
(c)
Figure 12 Quasiperiodic orbit at Ω = 805 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
Velo
city
(ms
)
2
25
3
07 075 08Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
25
1
0
05
20151050
(c)
Figure 13 Quasiperiodic orbit at Ω = 815 rads (a) the phase portrait (b) the Poincare map and (c) frequency spectrum
Journal of Advanced Transportation 9
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
5
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
1
0
05
20151050
(c)
Figure 14 Chaotic motion at Ω = 7964 rads (a) the phase portrait (b) Poincare map and (c) the frequency spectrum
8 805 81 815 82 825Ω (rads)
minus003
minus0025
minus002
minus0015
minus001
minus0005
0
0005
001
Larg
est L
yapu
nov
expo
nent
P2 P1
Figure 15 Evolution of the largest Lyapunov exponent
Ω = 82 rads The fact that the Lyapunov dimension is aninteger means that the system has periodic motion Whenparameter Ω increases beyond the bifurcation point (such aswhen Ω = 7964 rads) the Lyapunov exponents are 1205821 =00054396 and 1205822 = minus0092153 and the Lyapunov dimensionis 119889119871 = 1059 In this case the Lyapunov dimension is notan integer indicating that the system exhibits chaotic mo-tion
6 Controlling Chaos
Improving the performance of a dynamic system andoravoiding chaotic behavior require periodic motion whichis more important when working under specific conditionsCai et al [26] suggested a simple effective control methodthat converts chaotic motions into periodic motion usingthe linear state feedback as a system variable This approach
10 Journal of Advanced Transportation
G = minus014
minus045 minus04 minus035 minus03 minus025 minus02 minus015 minus01 minus005 0minus05Feedback gain G
minus05minus04minus03minus02minus01
00102030405
Disp
lace
men
t (m
)
Figure 16The bifurcation diagram for a system with state feedbackcontrol where 119866 denotes the feedback gain
to achieving an n-dimensional dynamic system is explainedbriefly as follows
= 119891 (119909 119905) (20)
where 119909(119905) isin 119877119899 is the state vector and 119891 =(1198911 119891119894 119891119899) where 119891119894 is a linear or a nonlinearfunction and 119891 includes at least one nonlinear function If119891119896(119909 119905) is a nonlinear function that gives chaotic motionin (20) then only one term of the state feedback for theavailable system variable 119909119898 is added to the equation thatincludes 119891119896 as follows
119896 = 119891119896 (119909 119905) + 119866119909119898 119896 119898 isin 1 2 119899 (21)
where119866 is the feedback gain Other functions remain in theiroriginal forms
System (3) with state feedback control can be written asfollows
1198891199101119889119905 = 11991021198891199102119889119905 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023
+ 119886Ω2 sin (Ω119905) + 1198661199102(22)
In the absence of state feedback control G = 0 and (3)describes chaotic motion when Ω = 7964 rads Figure 16shows the resulting bifurcation diagram for a system withstate feedback control This figure clearly shows that chaoticmotion occurs at approximately 119866 gt minus014 and disappearsat approximately 119866 le minus014 When feedback gain 119866 fallsbelow minus014 stable periodic motion occurs As shown inFigure 17 a control signal is applied to the system at 35 s togovern the chaotic oscillation In this manner state feedbackcontrol can be used to suppress chaotic motion and improvethe performance of a vehiclersquos suspension system The form
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
ControlledUncontrolled
Velo
city
(ms
) 5
0
minus5
Time (sec)80706050403020100
(b)
Figure 17 Transforming chaotic motion to a desired period-oneorbit for 119866 = minus03 and Ω = 7964 rads (a) the phase portraitfor the controlled system when the state feedback control signal isintroduced after 35 s and (b) the time responses of the velocity
of the control gain in the original system equation (1) is asfollows
119866 = 119866 sdot 119898 (23)
The physical meaning of gain 119866 is control gain and the unitof the gain is Nsdotskgsdotm
In many general systems that involve chaotic dynamicsthis state feedback technique does not require preliminaryor on-line analysis of the system dynamics and can beimplemented by adding the feedback of a suitable variable tothe original system with sufficient control gain to suppressthe development of chaos In this regard the state feedbackcontrol technique is simple and effective approach to chaossuppression
7 Conclusions
This study examined the nonlinear dynamic behavior ina vehicle suspension system with hysteretic damping Ourobjective was to develop a method to control chaotic vibra-tion Dynamic behavior was observed over the entire rangeof parameter values of the bifurcation sets and bifurca-tion diagram Using bifurcation analysis we identified acodimension-two bifurcation structure with double-zerodegeneracy in the system The bifurcation diagram indicatesthe existence of quasiperiodic orbit and chaotic motionthereby demonstrating the effectiveness of using Lyapunovexponents as a tool for identifying chaoticmotion Finally weproposed a state feedback control method to suppress chaoticmotions and improve the ride provided by an automotivesuspension system Simulation results confirm the feasibilityof the proposed method Our results provide insight intothe operating conditions under which undesirable dynamicmotion takes place in vehicle suspension systems Our results
Journal of Advanced Transportation 11
also provide a useful reference for engineers involved in thedesign of control systems for vehicle suspensions It shouldbe noted that in practical engineering phenomena such asactuator faults time-varying delays unmodeled dynamicsand dynamics disturbances often occur simultaneously andthese problems are beyond the scope of the current study Infuture work we will seek to control nonlinear systems withtime-varying delays
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The authors would like to thank the Ministry of Science andTechnology of the Republic of China Taiwan for financiallysupporting this research under Contract noMOST 105-2221-E-212-016
References
[1] H Chen Z-Y Liu and P-Y Sun ldquoApplication of constrainedscript Hinfin control to active suspension systems on half-carmodelsrdquo Journal of Dynamic Systems Measurement and Con-trol vol 127 no 3 pp 345ndash354 2005
[2] X Song M Ahmadian S Southward and L Miller ldquoParamet-ric study of nonlinear adaptive control algorithmwithmagneto-rheological suspension systemsrdquo Communications in NonlinearScience and Numerical Simulation vol 12 no 4 pp 584ndash6072007
[3] L-M Gui W-K Shi and W Liu ldquoA semi-active suspensiondesign for off-road vehicle base on Magneto-rheological tech-nologyrdquo in Proceedings of the 2012 9th International Conferenceon Fuzzy Systems and Knowledge Discovery FSKD 2012 pp2565ndash2568 China May 2012
[4] F Tu Q Yang C He and L Wang ldquoExperimental Study andDesign on Automobile SuspensionMade of Magneto-Rheolog-ical Damperrdquo in Proceedings of the International Conference onFuture Energy Environment andMaterials FEEM2012 pp 417ndash425 Hong Kong April 2012
[5] P W Nugroho H Du W Li and G Alici ldquoImplementation ofAdaptive Neuro Fuzzy Inference System controller on magnetorheological damper suspensionrdquo in Proceedings of the 2013IEEEASME International Conference on Advanced IntelligentMechatronicsMechatronics forHumanWellbeing AIM2013 pp1399ndash1403 Australia July 2013
[6] Arnold VI Geometric Methods in the Theory of OrdinaryDifferential Equations New York Springer-Verlag 1988
[7] P J Holmes ldquoBifurcations to divergence and flutter in flow-induced oscillations a finite dimensional analysisrdquo Journal ofSound and Vibration vol 53 no 4 pp 471ndash503 1977
[8] J Guckenheimer and P J Holmes Nonlinear OscillationsDynamical System and Bifurcation of Vector Fields Springer-Verlag New York 2013
[9] C-Y Tseng and P-C Tung ldquoDynamics of nonlinear structurewithmagnetic actuatorrdquo Japanese Journal of Applied Physics vol34 no 1 pp 374ndash382 1995
[10] K Yagasaki ldquoCodimension-two bifurcations in a pendulumwith feedback controlrdquo International Journal of Non-LinearMechanics vol 34 no 6 pp 983ndash1002 1999
[11] R Tian Q Cao and S Yang ldquoThe codimension-two bifurcationfor the recent proposed SD oscillatorrdquoNonlinear Dynamics vol59 no 1-2 pp 19ndash27 2010
[12] S Yin P Shi and H Yang ldquoAdaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems With UnmodeledDynamicsrdquo IEEE Transactions on Cybernetics vol 46 no 8 pp1926ndash1938 2016
[13] S Yin H Yang H Gao J Qiu and O Kaynak ldquoAn adaptiveNN-based approach for fault-tolerant control of nonlineartime-varying delay systems with unmodeled dynamicsrdquo IEEETransactions on Neural Networks and Learning Systems vol 28no 8 pp 1902ndash1913 2017
[14] S Li S Yang and W Guo ldquoInvestigation on chaotic motion inhysteretic non-linear suspension system with multi-frequencyexcitationsrdquoMechanics Research Communications vol 31 no 2pp 229ndash236 2004
[15] R D Naik and P M Singru ldquoResonance stability and chaoticvibration of a quarter-car vehicle model with time-delay feed-backrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 8 pp 3397ndash3410 2011
[16] M Borowiec G Litak and M I Friswell ldquoNonlinear responseof an oscillator with a magneto-rheological damper subjectedto external forcingrdquo Applied Mechanics and Materials vol 5-6pp 277ndash284 2006
[17] G Litak M Borowiec M I Friswell and K Szabelski ldquoChaoticvibration of a quarter-car model excited by the road surfaceprofilerdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 7 pp 1373ndash1383 2008
[18] J Marzbanrad and A Keshavarzi ldquoChaotic vibrations of anonlinear air suspension system under consecutive half sinespeed bumprdquo Indian Journal of Science and Technology vol 8pp 72ndash84 2015
[19] J Marzbanrad and A Keshavarzi ldquoA Chaotic viewpoint on aquarter-car air suspension model with numerical and experi-mental analysis[J]rdquo Journal of Cahiers Des Sciences vol 23 2014
[20] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[21] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[22] E R Hunt ldquoStabilizing high-period orbits in a chaotic systemthe diode resonatorrdquo Physical Review Letters vol 67 no 15 pp1953ndash1955 1991
[23] C Cai Z XuW Xu and B Feng ldquoNotch filter feedback controlin a class of chaotic systemsrdquoAutomatica vol 38 no 4 pp 695ndash701 2002
[24] G Litak M Borowiec M Ali L M Saha and M I FriswellldquoPulsive feedback control of a quarter car model forced by aroad profilerdquo Chaos Solitons amp Fractals vol 33 no 5 pp 1672ndash1676 2007
[25] H Du K Y Sze and J Lam ldquoSemi-active 119867infin control ofvehicle suspensionwithmagneto-rheological dampersrdquo Journalof Sound and Vibration vol 283 no 3ndash5 pp 981ndash996 2005
[26] C Cai Z Xu and W Xu ldquoConverting chaos into periodicmotion by state feedback controlrdquo Automatica vol 38 no 11pp 1927ndash1933 2002
[27] M Ashkenazi and S-N Chow ldquoNormal forms near criticalpoints for differential equations and mapsrdquo IEEE Transactions
12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

2 Journal of Advanced Transportation
issue of codimension bifurcations has largely been over-looked
In this study we examined a suspension system present-ing codimension-two bifurcation andhomoclinic orbits bothof which determine the nature of the dynamic behavior andthe existence of strange attractors We sought to calculatethe strange attractor using numerical simulation in whichexternal forces from a road profile are added to the systemas a parameter with a specific range of values We employedbifurcation diagrams phase portraits Poincare maps fre-quency spectra and Lyapunov exponents to explain periodicand chaotic motions in a vehicle suspension system thatexerts hysteretic nonlinear damping forces Algorithms thatcomputes Lyapunov exponents for smooth dynamic systems[20] were used to determine whether the system exhibitschaotic motion
Chaotic behavior is normally considered undesirable dueto the restrictions it imposes on the operating range of electri-cal and mechanical devices Many engineering problems canonly be resolved by driving a chaotic attractor in a periodicorbit Numerousmethods have been proposed for the controlof chaos [21ndash23] including suspension systems [15 24 25] Inthis study we adopted the simple control method proposedby Cai et al [26] in which state feedback is used to convertchaotic motion into stable motion Numerical simulationsdemonstrate the feasibility of the proposed approach
This paper is organized as follows Section 2 describesthe proposed vehicle suspension system using a quarter-car model under kinematic excitation by a road surfaceprofile Section 3 outlines the local bifurcation analysis usedto identify codimension-two bifurcation and homoclinicorbits Section 4 elucidates the complex dynamic behaviorin the suspension system using numerical analysis such asa bifurcation diagrams phase portraits Poincare maps andfrequency spectra Section 5 presents the Lyapunov exponentused to determine whether the system exhibits chaoticmotion A state feedback control technique for controllingchaos in the suspension system is presented in Section 6Conclusions are drawn in Section 7
2 Formulation of Problem
Figure 1 presents quarter-car model with a single degree-of-freedom and hysteretic nonlinear damping The equation ofmotion for the system was formulated by Li et al [14]
119898 + 1198961 (119909 minus 1199090) + 119865ℎ = 0 (1)
where 119865ℎ is an additional nonlinear hysteretic suspensiondamping and stiffness force which is dependent on therelative displacement and velocity
119865ℎ = 1198962 (119909 minus 1199090)3 + 1198621 ( minus 0) + 1198622 ( minus 0)3 1199090 = 119886 sin (Ω119905) (2)
In defining the relative vertical displacement as 119910 = 119909 minus 1199090(1) can be written as follows
119910 + 1205962119910 + 11986111199103 + 1198612 119910 + 1198613 1199103 = 119860 sin (Ω119905) (3)
mg
x
x0 = a MCHΩt
Mass
Figure 1 Schematic diagram of the quarter-car model
Table 1 Nomenclature and parameters
Notation Value Unit Description119898 240 kg The body mass1198961 16 times 104 Nm The suspension stiffness coefficient
1198962 30 times 104 Nm3 The nonlinear hysteretic suspensionstiffness coefficient
1198621 250 Nsm The linear damping coefficient
1198622 minus25 Ns3m3 The nonlinear hysteretic suspensionviscous damping coefficient
119886 005 m The amplitude of road excitation1199090 m The road excitation119909 m The bodyrsquos vertical displacementΩ rads The frequency of road excitation
where 1205962 = 1198961119898 1198611 = 1198962119898 1198612 = 1198621119898 1198613 = 1198622119898119860 = 119886Ω2The states are chosen such that 1199101 = y 1199102 = 119910 Thus the
state-space model for the suspension system can be writtenas
1199101 = 1199102 (4a)
1199102 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023 (4b)
The amplitude of the road profile excitation is 119886 =0 Table 1 lists the values of the parameters in the aboveequations which were obtained using the methods outlinedby Li et al [14]
3 Local Codimension-TwoBifurcation Analysis
Our main objective in this analysis is to observe thequalitative behavior of the system and how it changes assystem parameters are varied Changes occurring near theequilibrium point of the system are referred to as localbifurcation The codimension of bifurcation refers to theminimumnumber of parameters that must be varied in orderto observe a specific type of bifurcation [8]
Journal of Advanced Transportation 3
Nonlinear analysis must be based on linear analysisBifurcation analysis is based on the Jacobian matrix in (4a)and (4b) When (1198961 1198881) = (0 0) and the Jacobian matrix hasdouble-zero eigenvalues of the form of [ 0 10 0 ] we have themost degenerate situation (eigenvalues with zero real part)that is a double-zero codimension-two bifurcation problemBifurcation equations can be written as follows
1199101 = 1199102 (5a)
1199102 = minus119861111991013 + higher order terms (5b)
Bifurcation equations (5a) and (5b) take the normal formbecause they are the simplest forms of the equations ofmotion [8 27ndash30]
The blow-up technique is used to checkwhether the cubicterms in (5a) and (5b) determine local behavior The blow-up technique involves a singular change to the coordinatesthat expands degenerate fixed points into circles containinga finite number of fixed points If these fixed points arehyperbolic following the first change in the coordinates thenthe local flow near the circle (and consequently flow near theoriginal fixed point) remains stable with respect to higher-order terms If these fixed points are all degenerate then thecoordinates must be changed again If all of the fixed pointsbecome hyperbolic within a finite number of coordinatechanges then a system with only lower-order terms willexhibit the same qualitative behavior as the overall system [8]The steps used in the blow-up method are as follows
First Blow-Up
1199101 = 119903 cos 120579 (6a)
1199102 = 119903 sin 120579 (6b)
Equations (5a) (5b) and (6a) (6b) become
119903 = 119903 sin 120579 (1 minus 11986111199032cos2120579) + hot (7a)
120579 = minussin2120579 minus 11986111199032cos4120579 + hot (7b)
Stability analysis reveals that the system has two degener-ate equilibrium points (0 0) and (0 120587) which means that theblow-up procedure must be repeated In the case of (0 0) thepower series in normal form is
119903 = 119903120579 + hot (8a)
120579 = minus1205792 minus 11986111199032 + hot (8b)
Second Blow-Up Let
119903 = 120588 sin120601 (9a)
120579 = 120588 cos120601 (9b)
so that (8a) (8b) and (9a) (9b) become
120588 = minus1205882 cos120601 (1198611sin2120601 + cos2120601) + hot (10a)
120601 = 120588 sin120601 (2cos2120601 minus 1198611sin2120601) + hot (10b)
After dividing by the unaffected common component 120588(10a) and (10b) have two hyperbolic fixed points (0 0) and(0 120587) Thus no further blow-up is required
For the other equilibrium point (0 120587) the power seriesin the normal form is the same as the power series used for(8a) and (8b) such that the same results are obtained Thedegenerate field contains cubic terms of the lowest order andunfolding is performed using the two-parameter family asfollows
1199101 = 1199102 (11a)
1199102 = 11987011199101 + 11987021199102 minus 119861111991013 (11b)
where 1198701 = minus1198961119898 1198702 = minus1198881119898 The higher-order terms in(11a) and (11b) are disregarded when applied as an alternativefor (4a) and (4b)
The term ldquobifurcation setrdquo refers to a set in parameterspace on which the system bifurcates It is obtained fromunfolded equations in the normal form
There are three equilibrium points in this case
1 (0 0) for all119870111987022 (plusmnradic11987011198611) for1198701 gt 0
By checking the stability of these equilibrium points weobtain the following
(1) For 1198701 = 0 a subcritical pitchfork bifurcation occurs if1198702 gt 0 and a supercritical pitchfork bifurcation occurs if1198702 lt 0(2) For 1198701 gt 0 and 1198702 = 0 a rescaling technique and Mel-nikovrsquos perturbation method are used to obtain the completebifurcation set associated with homoclinic orbits in theunfolding bifurcation equations (11a) and (11b) [8]
Let 1199101 = 120598119906 1199102 = 1205982V 1198701 = 1205982V1 1198702 = 1205983V2 119905 rarr 120598119905Thus after rescaling (11a) and (11b) are rewritten as
= V (12a)
V = V1119906 + 1205982VV2 minus 11986111199063 (12b)
Melnikovrsquos method is then used to characterize the relation-ship between 1198701 and1198702
After a series of operations the following expression isobtained
1198702 = 0 (13a)
1198701 = 11986111205983 (13b)
Equations (13a) and (13b) yield the homoclinic saddle con-nection referred to as homoclinic bifurcation
(3) For 1198701 lt 0 and 1198702 = 0 the Jacobian matrix in (11a) and(11b) is written as
DF (0 0) = [ 0 11198701 0] (14)
4 Journal of Advanced Transportation
Region (V) Region (I)
Region (III) Region (II)
K2
P+
Pminus
K1SC
Figure 2The bifurcation sets that are associated with typical phaseportraits in each region where 119875+ represents a subcritical pitchfork119875minus represents a supercritical pitchfork and SC represents a homo-clinic bifurcation
The eigenvalues for DF(0 0) are120582 = plusmnradic1198701119894 (15)
For the following change in coordinates
[11991011199102] = [ 0 0minusradic1198701 0] [
119880119881] (16)
Equations (12a) and (12b) become
[] = [ 1198702 minusradic1198701radic1198701 0 ] [119880119881] + [[
[0
11986111198813radic1198701]]] (17)
Let 119892(119880119881) = 11986111198813radic1198701 and 119891(119880119881) = 0Clearly it can be seen that
119891VVV = 0119891V119906119906 = 0119892VV119906 = 0119892119906119906119906 = 0119891119906119906 = 0119891119906V = 0119891VV = 0119892119906119906 = 0119892119906V = 0119892VV = 0
(18)
According to the Hopf bifurcation theorem [8] coeffi-cient a must not equal zero In this case the coefficient aequals zero therefore there is no Hopf bifurcation
Numerical simulations using (4a) and (4b) were per-formed to check the validity of this bifurcation analysisThe parameter space was divided into several regions usingbifurcation sets as shown in Figure 2 The commercial
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2
Velo
city
(ms
)
00100050 0015 002minus001minus0015 minus0005minus002Displacement (m)
Figure 3 Numerical simulation for region (I) for (1198701 1198702) = (002001)
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2Ve
loci
ty (m
s)
minus0015 minus001 minus0005 0 0005 001 0015 002minus002Displacement (m)
Figure 4 Numerical simulation for SC for (1198701 1198702) = (002 00)
package DIVPRK of IMSL in the FORTRAN subroutines formathematics applications was used to solve these ordinarydifferential equations [31] The resulting numerical simu-lations are presented in Figures 3ndash7 The results in eachparametric region are discussed below
Region (I) includes sources and a saddle If the initialconditions are in the neighborhood of the two sources thenthe mass is distant from the equilibrium points (Figure 3)At the boundary between regions (I) and (II) (ie in thebifurcation set SC (1198702 = 0 1198701 gt 0)) the systemis an integrable system with homoclinic orbits (Figure 4)Therefore if the damping term is disregarded then the systemis conservative In region (II) the system is not integrablewith two sinks and one saddle If the initial conditions arein the neighborhood of the saddle then the mass returns tothe two sinks which are stable points as time approachesinfinity (Figure 5) At the boundary between regions (II) and
Journal of Advanced Transportation 5
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2
Velo
city
(ms
)
minus002 minus001 minus0005 0 0005 001 0015 002minus0015Displacement (m)
Figure 5 Numerical simulation for region (II) for (11987011198702) = (002minus001)
minus1
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Velo
city
(ms
)
minus6 minus4 minus2 0 2 4 6 8minus8Displacement (m)
times10minus3
times10minus3
Figure 6 Numerical simulation for region (III) for (1198701 1198702) =(minus002 minus001)
(III) (ie in bifurcation set 119875minus) the two sinks move closerto the saddle as the parameters approach bifurcation set 119875minusand the stability region shrinks to zero In region (III) thetwo sinks disappear and the saddle (0 0) becomes a sinkThis is a supercritical pitchfork bifurcation with an attractingsink region (III) (Figure 6) From regions (III) to (V) theeigenvalues for the Jacobian matrix cross the imaginary axishowever there is no Hopf bifurcation This means that thedynamic behavior is linear which is a similar situation tothat when a stable equilibrium point becomes an unstableequilibrium point (Figure 7) Between region (V) and region(I) boundary 119875+ must be crossed This is called a subcriticalpitchfork bifurcation
In terms of the equilibria and Figure 2 1198701 determinesthe number of equilibrium points and 1198702 determines the
minus002 minus0015 minus001 minus0005 0 0005 001 0015 002Displacement (m)
times10minus3
minus4
minus3
minus2
minus1
0
1
2
3
4
Velo
city
(ms
)
Figure 7 Numerical simulation for region (V) for (1198701 1198702) =(minus002 001)
local behavior (eg stability or instability) and whetherthere are homoclinic orbits Clearly only a positive dampingcoefficient results in a stable system
4 Analytical Tools for Observing NonlinearDynamics in a Vehicle Suspension System
In (3) the amplitude of the road excitation 119886 equals005m We performed a series of numerical simulationsusing (3) to determine the characteristics of this systemDynamic behaviors can be more clearly observed over arange of parameter values in bifurcation diagrams which arewidely used to describe transitions from periodic motion tochaoticmotion in dynamic systemsThe resulting bifurcationdiagram is presented in Figure 8 This figure clearly showschaotic motion in region A Region C presents period-1motion and there is a stable equilibrium point In this regioneach response was characterized using a phase portrait aPoincare map (velocity versus phase angle) and a frequencyspectrum Figure 9 shows that the equilibrium point of thesystem is stable if parameter Ω exists in region C It is well-known that road excitation covers a wide range frequenciesand higher vehicle velocities increase excitation from theroad surface The range of human sensitivity to frequency isfrom 4 to 8Hz (about 2512 rads to 5024 rads) thereforewe limited this investigation to the case of Ω = 400 radsFigure 10 shows the periodic motion in the system in caseswhere the parameter exists in regionC (ieΩ = 82 rads andΩ = 40 rads) The amplitude of road excitation is defined as005m while the response of the system (even in periodicmotion) has an amplitude of near 035m (Figure 9) Clearlythis response is not acceptable When parameter Ω existsin region B quasiperiodic motion occurs in this regionAs shown in Figures 11ndash13 the quasiperiodic trajectoryis restricted to an annular-like region of the state spaceand differs considerably from periodic trajectories When
6 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
Ω (rads)40353025201510
Region C(periodic motion)
(a)
Velo
city
(ms
)
4
2
0
Ω (rads)82582815818058795
Region B(quasiperiodic motion)
Region A(chaotic motion)
Region C(periodic motion)
(quasiperiodic motion) Region C(periodic mo
(b)
Figure 8 Bifurcation diagram for the system when the amplitude of the road excitation 119886 is 005m (a) Ω = 796 rads to 40 rads (b) Ω =796 rads to 825 rads
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
3
28
26
24
22
Phase angle0850807507
(b)
Velo
city
(ms
)
Ω (rads)
3
2
1
020151050
(c)
Figure 9 The period-one orbit at Ω = 82 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
Displacement (m)0080060040020minus002minus004minus006minus008
minus2
minus1
0
1
2
(b)
Figure 10 Phase portrait (a)Ω = 82 rads (b)Ω = 40 rads
Journal of Advanced Transportation 7
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
2
15
1
0
05
20151050
(c)
Figure 11 Quasiperiodic orbit at Ω = 80 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Ω = 80 805 or 815 the system exhibits a quasiperiodicmotion and the map forms a continuous closed orbit in thePoincare section as shown in Figures 11ndash13 As the forcingfrequency (Ω) continues decreasing into regionA (Figure 14)chaotic motion produces chatter vibration The transitionsequence for the system in this paper is from periodic motionto quasiperiodic motion and finally to chaotic motion Theparticular features of these two descriptors characterize thechaotic behavior The Poincare map contains an infinite setof points which are referred to as a strange attractor Thefrequency spectrum of the chaotic motion is a continu-ous broad spectrum The strange attractor and continuousFourier spectrum are strong indicators of chaos Figure 14shows clear indications of chaotic behavior in region AFigures 14(a)ndash14(c) respectively show the phase portraits thePoincare maps and frequency spectra
5 Analysis of Chaotic Phenomena LyapunovExponent and Lyapunov Dimension
The analysis presented in Section 4 is insufficient to confi-dently identify chaotic motion in a suspension system In thissection we adopt Lyapunov exponents to verify the existenceof chaotic motion In every dynamic system the spectrumof Lyapunov exponents (120582) [20] indicates variations in thelengths areas and volumes of the phase space Verifying theexistence of chaos requires calculation of only the largestexponent to indicate whether nearby trajectories diverge
(120582 gt 0) or converge (120582 lt 0) on average Any boundedmotionwithin a system that has at least one positive Lyapunovexponent is defined as chaotic The Lyapunov exponents forperiodic motion are not positive
Figure 15 plots the evolution of the largest Lyapunovexponent in a suspension system This value is computedusing the algorithm presented by Wolf et al [20] Figure 14shows that chaotic motion began at approximately Ω =7965 rads because at point (1198751) the sign of the largestLyapunov exponent changed from negative to positive as theparameterΩ slowly decreased Between points1198751 and1198752 thelargest Lyapunov exponent approached zeroThe existence ofa forcing frequency Ω in these regions denotes the motionin the system as quasiperiodic When the value of Ω isgreater than 1198751 (such as when Ω = 82 rads) the Lyapunovexponents obtained using (3) are 1205821 = minus00010375 and 1205822 =minus00013232The sum of these values is 1205821+1205822 = minus00023607this negative value demonstrates that the motion of massat these values eventually converges to a stable limit cycleUsing the Lyapunov exponents for a dynamical system where1205821 ge sdot sdot sdot ge 120582119899 Kaplan and Yorke [32] provided an estimationof the Lyapunov dimension 119889119871 as follows
119889119871 = 119895 + 110038161003816100381610038161003816120582119895+110038161003816100381610038161003816119895sum119894=1
120582119894 (19)
where 119895 is the largest integer that satisfies sum119895119894=1 120582119894 gt 0This technique yields a Lyapunov dimension of 119889119871 = 1 for
8 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
minus4
minus2
04020minus02minus06 minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
06 07 08 09Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
1
0
05
20151050
(c)
Figure 12 Quasiperiodic orbit at Ω = 805 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
Velo
city
(ms
)
2
25
3
07 075 08Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
25
1
0
05
20151050
(c)
Figure 13 Quasiperiodic orbit at Ω = 815 rads (a) the phase portrait (b) the Poincare map and (c) frequency spectrum
Journal of Advanced Transportation 9
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
5
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
1
0
05
20151050
(c)
Figure 14 Chaotic motion at Ω = 7964 rads (a) the phase portrait (b) Poincare map and (c) the frequency spectrum
8 805 81 815 82 825Ω (rads)
minus003
minus0025
minus002
minus0015
minus001
minus0005
0
0005
001
Larg
est L
yapu
nov
expo
nent
P2 P1
Figure 15 Evolution of the largest Lyapunov exponent
Ω = 82 rads The fact that the Lyapunov dimension is aninteger means that the system has periodic motion Whenparameter Ω increases beyond the bifurcation point (such aswhen Ω = 7964 rads) the Lyapunov exponents are 1205821 =00054396 and 1205822 = minus0092153 and the Lyapunov dimensionis 119889119871 = 1059 In this case the Lyapunov dimension is notan integer indicating that the system exhibits chaotic mo-tion
6 Controlling Chaos
Improving the performance of a dynamic system andoravoiding chaotic behavior require periodic motion whichis more important when working under specific conditionsCai et al [26] suggested a simple effective control methodthat converts chaotic motions into periodic motion usingthe linear state feedback as a system variable This approach
10 Journal of Advanced Transportation
G = minus014
minus045 minus04 minus035 minus03 minus025 minus02 minus015 minus01 minus005 0minus05Feedback gain G
minus05minus04minus03minus02minus01
00102030405
Disp
lace
men
t (m
)
Figure 16The bifurcation diagram for a system with state feedbackcontrol where 119866 denotes the feedback gain
to achieving an n-dimensional dynamic system is explainedbriefly as follows
= 119891 (119909 119905) (20)
where 119909(119905) isin 119877119899 is the state vector and 119891 =(1198911 119891119894 119891119899) where 119891119894 is a linear or a nonlinearfunction and 119891 includes at least one nonlinear function If119891119896(119909 119905) is a nonlinear function that gives chaotic motionin (20) then only one term of the state feedback for theavailable system variable 119909119898 is added to the equation thatincludes 119891119896 as follows
119896 = 119891119896 (119909 119905) + 119866119909119898 119896 119898 isin 1 2 119899 (21)
where119866 is the feedback gain Other functions remain in theiroriginal forms
System (3) with state feedback control can be written asfollows
1198891199101119889119905 = 11991021198891199102119889119905 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023
+ 119886Ω2 sin (Ω119905) + 1198661199102(22)
In the absence of state feedback control G = 0 and (3)describes chaotic motion when Ω = 7964 rads Figure 16shows the resulting bifurcation diagram for a system withstate feedback control This figure clearly shows that chaoticmotion occurs at approximately 119866 gt minus014 and disappearsat approximately 119866 le minus014 When feedback gain 119866 fallsbelow minus014 stable periodic motion occurs As shown inFigure 17 a control signal is applied to the system at 35 s togovern the chaotic oscillation In this manner state feedbackcontrol can be used to suppress chaotic motion and improvethe performance of a vehiclersquos suspension system The form
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
ControlledUncontrolled
Velo
city
(ms
) 5
0
minus5
Time (sec)80706050403020100
(b)
Figure 17 Transforming chaotic motion to a desired period-oneorbit for 119866 = minus03 and Ω = 7964 rads (a) the phase portraitfor the controlled system when the state feedback control signal isintroduced after 35 s and (b) the time responses of the velocity
of the control gain in the original system equation (1) is asfollows
119866 = 119866 sdot 119898 (23)
The physical meaning of gain 119866 is control gain and the unitof the gain is Nsdotskgsdotm
In many general systems that involve chaotic dynamicsthis state feedback technique does not require preliminaryor on-line analysis of the system dynamics and can beimplemented by adding the feedback of a suitable variable tothe original system with sufficient control gain to suppressthe development of chaos In this regard the state feedbackcontrol technique is simple and effective approach to chaossuppression
7 Conclusions
This study examined the nonlinear dynamic behavior ina vehicle suspension system with hysteretic damping Ourobjective was to develop a method to control chaotic vibra-tion Dynamic behavior was observed over the entire rangeof parameter values of the bifurcation sets and bifurca-tion diagram Using bifurcation analysis we identified acodimension-two bifurcation structure with double-zerodegeneracy in the system The bifurcation diagram indicatesthe existence of quasiperiodic orbit and chaotic motionthereby demonstrating the effectiveness of using Lyapunovexponents as a tool for identifying chaoticmotion Finally weproposed a state feedback control method to suppress chaoticmotions and improve the ride provided by an automotivesuspension system Simulation results confirm the feasibilityof the proposed method Our results provide insight intothe operating conditions under which undesirable dynamicmotion takes place in vehicle suspension systems Our results
Journal of Advanced Transportation 11
also provide a useful reference for engineers involved in thedesign of control systems for vehicle suspensions It shouldbe noted that in practical engineering phenomena such asactuator faults time-varying delays unmodeled dynamicsand dynamics disturbances often occur simultaneously andthese problems are beyond the scope of the current study Infuture work we will seek to control nonlinear systems withtime-varying delays
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The authors would like to thank the Ministry of Science andTechnology of the Republic of China Taiwan for financiallysupporting this research under Contract noMOST 105-2221-E-212-016
References
[1] H Chen Z-Y Liu and P-Y Sun ldquoApplication of constrainedscript Hinfin control to active suspension systems on half-carmodelsrdquo Journal of Dynamic Systems Measurement and Con-trol vol 127 no 3 pp 345ndash354 2005
[2] X Song M Ahmadian S Southward and L Miller ldquoParamet-ric study of nonlinear adaptive control algorithmwithmagneto-rheological suspension systemsrdquo Communications in NonlinearScience and Numerical Simulation vol 12 no 4 pp 584ndash6072007
[3] L-M Gui W-K Shi and W Liu ldquoA semi-active suspensiondesign for off-road vehicle base on Magneto-rheological tech-nologyrdquo in Proceedings of the 2012 9th International Conferenceon Fuzzy Systems and Knowledge Discovery FSKD 2012 pp2565ndash2568 China May 2012
[4] F Tu Q Yang C He and L Wang ldquoExperimental Study andDesign on Automobile SuspensionMade of Magneto-Rheolog-ical Damperrdquo in Proceedings of the International Conference onFuture Energy Environment andMaterials FEEM2012 pp 417ndash425 Hong Kong April 2012
[5] P W Nugroho H Du W Li and G Alici ldquoImplementation ofAdaptive Neuro Fuzzy Inference System controller on magnetorheological damper suspensionrdquo in Proceedings of the 2013IEEEASME International Conference on Advanced IntelligentMechatronicsMechatronics forHumanWellbeing AIM2013 pp1399ndash1403 Australia July 2013
[6] Arnold VI Geometric Methods in the Theory of OrdinaryDifferential Equations New York Springer-Verlag 1988
[7] P J Holmes ldquoBifurcations to divergence and flutter in flow-induced oscillations a finite dimensional analysisrdquo Journal ofSound and Vibration vol 53 no 4 pp 471ndash503 1977
[8] J Guckenheimer and P J Holmes Nonlinear OscillationsDynamical System and Bifurcation of Vector Fields Springer-Verlag New York 2013
[9] C-Y Tseng and P-C Tung ldquoDynamics of nonlinear structurewithmagnetic actuatorrdquo Japanese Journal of Applied Physics vol34 no 1 pp 374ndash382 1995
[10] K Yagasaki ldquoCodimension-two bifurcations in a pendulumwith feedback controlrdquo International Journal of Non-LinearMechanics vol 34 no 6 pp 983ndash1002 1999
[11] R Tian Q Cao and S Yang ldquoThe codimension-two bifurcationfor the recent proposed SD oscillatorrdquoNonlinear Dynamics vol59 no 1-2 pp 19ndash27 2010
[12] S Yin P Shi and H Yang ldquoAdaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems With UnmodeledDynamicsrdquo IEEE Transactions on Cybernetics vol 46 no 8 pp1926ndash1938 2016
[13] S Yin H Yang H Gao J Qiu and O Kaynak ldquoAn adaptiveNN-based approach for fault-tolerant control of nonlineartime-varying delay systems with unmodeled dynamicsrdquo IEEETransactions on Neural Networks and Learning Systems vol 28no 8 pp 1902ndash1913 2017
[14] S Li S Yang and W Guo ldquoInvestigation on chaotic motion inhysteretic non-linear suspension system with multi-frequencyexcitationsrdquoMechanics Research Communications vol 31 no 2pp 229ndash236 2004
[15] R D Naik and P M Singru ldquoResonance stability and chaoticvibration of a quarter-car vehicle model with time-delay feed-backrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 8 pp 3397ndash3410 2011
[16] M Borowiec G Litak and M I Friswell ldquoNonlinear responseof an oscillator with a magneto-rheological damper subjectedto external forcingrdquo Applied Mechanics and Materials vol 5-6pp 277ndash284 2006
[17] G Litak M Borowiec M I Friswell and K Szabelski ldquoChaoticvibration of a quarter-car model excited by the road surfaceprofilerdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 7 pp 1373ndash1383 2008
[18] J Marzbanrad and A Keshavarzi ldquoChaotic vibrations of anonlinear air suspension system under consecutive half sinespeed bumprdquo Indian Journal of Science and Technology vol 8pp 72ndash84 2015
[19] J Marzbanrad and A Keshavarzi ldquoA Chaotic viewpoint on aquarter-car air suspension model with numerical and experi-mental analysis[J]rdquo Journal of Cahiers Des Sciences vol 23 2014
[20] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[21] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[22] E R Hunt ldquoStabilizing high-period orbits in a chaotic systemthe diode resonatorrdquo Physical Review Letters vol 67 no 15 pp1953ndash1955 1991
[23] C Cai Z XuW Xu and B Feng ldquoNotch filter feedback controlin a class of chaotic systemsrdquoAutomatica vol 38 no 4 pp 695ndash701 2002
[24] G Litak M Borowiec M Ali L M Saha and M I FriswellldquoPulsive feedback control of a quarter car model forced by aroad profilerdquo Chaos Solitons amp Fractals vol 33 no 5 pp 1672ndash1676 2007
[25] H Du K Y Sze and J Lam ldquoSemi-active 119867infin control ofvehicle suspensionwithmagneto-rheological dampersrdquo Journalof Sound and Vibration vol 283 no 3ndash5 pp 981ndash996 2005
[26] C Cai Z Xu and W Xu ldquoConverting chaos into periodicmotion by state feedback controlrdquo Automatica vol 38 no 11pp 1927ndash1933 2002
[27] M Ashkenazi and S-N Chow ldquoNormal forms near criticalpoints for differential equations and mapsrdquo IEEE Transactions
12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 3
Nonlinear analysis must be based on linear analysisBifurcation analysis is based on the Jacobian matrix in (4a)and (4b) When (1198961 1198881) = (0 0) and the Jacobian matrix hasdouble-zero eigenvalues of the form of [ 0 10 0 ] we have themost degenerate situation (eigenvalues with zero real part)that is a double-zero codimension-two bifurcation problemBifurcation equations can be written as follows
1199101 = 1199102 (5a)
1199102 = minus119861111991013 + higher order terms (5b)
Bifurcation equations (5a) and (5b) take the normal formbecause they are the simplest forms of the equations ofmotion [8 27ndash30]
The blow-up technique is used to checkwhether the cubicterms in (5a) and (5b) determine local behavior The blow-up technique involves a singular change to the coordinatesthat expands degenerate fixed points into circles containinga finite number of fixed points If these fixed points arehyperbolic following the first change in the coordinates thenthe local flow near the circle (and consequently flow near theoriginal fixed point) remains stable with respect to higher-order terms If these fixed points are all degenerate then thecoordinates must be changed again If all of the fixed pointsbecome hyperbolic within a finite number of coordinatechanges then a system with only lower-order terms willexhibit the same qualitative behavior as the overall system [8]The steps used in the blow-up method are as follows
First Blow-Up
1199101 = 119903 cos 120579 (6a)
1199102 = 119903 sin 120579 (6b)
Equations (5a) (5b) and (6a) (6b) become
119903 = 119903 sin 120579 (1 minus 11986111199032cos2120579) + hot (7a)
120579 = minussin2120579 minus 11986111199032cos4120579 + hot (7b)
Stability analysis reveals that the system has two degener-ate equilibrium points (0 0) and (0 120587) which means that theblow-up procedure must be repeated In the case of (0 0) thepower series in normal form is
119903 = 119903120579 + hot (8a)
120579 = minus1205792 minus 11986111199032 + hot (8b)
Second Blow-Up Let
119903 = 120588 sin120601 (9a)
120579 = 120588 cos120601 (9b)
so that (8a) (8b) and (9a) (9b) become
120588 = minus1205882 cos120601 (1198611sin2120601 + cos2120601) + hot (10a)
120601 = 120588 sin120601 (2cos2120601 minus 1198611sin2120601) + hot (10b)
After dividing by the unaffected common component 120588(10a) and (10b) have two hyperbolic fixed points (0 0) and(0 120587) Thus no further blow-up is required
For the other equilibrium point (0 120587) the power seriesin the normal form is the same as the power series used for(8a) and (8b) such that the same results are obtained Thedegenerate field contains cubic terms of the lowest order andunfolding is performed using the two-parameter family asfollows
1199101 = 1199102 (11a)
1199102 = 11987011199101 + 11987021199102 minus 119861111991013 (11b)
where 1198701 = minus1198961119898 1198702 = minus1198881119898 The higher-order terms in(11a) and (11b) are disregarded when applied as an alternativefor (4a) and (4b)
The term ldquobifurcation setrdquo refers to a set in parameterspace on which the system bifurcates It is obtained fromunfolded equations in the normal form
There are three equilibrium points in this case
1 (0 0) for all119870111987022 (plusmnradic11987011198611) for1198701 gt 0
By checking the stability of these equilibrium points weobtain the following
(1) For 1198701 = 0 a subcritical pitchfork bifurcation occurs if1198702 gt 0 and a supercritical pitchfork bifurcation occurs if1198702 lt 0(2) For 1198701 gt 0 and 1198702 = 0 a rescaling technique and Mel-nikovrsquos perturbation method are used to obtain the completebifurcation set associated with homoclinic orbits in theunfolding bifurcation equations (11a) and (11b) [8]
Let 1199101 = 120598119906 1199102 = 1205982V 1198701 = 1205982V1 1198702 = 1205983V2 119905 rarr 120598119905Thus after rescaling (11a) and (11b) are rewritten as
= V (12a)
V = V1119906 + 1205982VV2 minus 11986111199063 (12b)
Melnikovrsquos method is then used to characterize the relation-ship between 1198701 and1198702
After a series of operations the following expression isobtained
1198702 = 0 (13a)
1198701 = 11986111205983 (13b)
Equations (13a) and (13b) yield the homoclinic saddle con-nection referred to as homoclinic bifurcation
(3) For 1198701 lt 0 and 1198702 = 0 the Jacobian matrix in (11a) and(11b) is written as
DF (0 0) = [ 0 11198701 0] (14)
4 Journal of Advanced Transportation
Region (V) Region (I)
Region (III) Region (II)
K2
P+
Pminus
K1SC
Figure 2The bifurcation sets that are associated with typical phaseportraits in each region where 119875+ represents a subcritical pitchfork119875minus represents a supercritical pitchfork and SC represents a homo-clinic bifurcation
The eigenvalues for DF(0 0) are120582 = plusmnradic1198701119894 (15)
For the following change in coordinates
[11991011199102] = [ 0 0minusradic1198701 0] [
119880119881] (16)
Equations (12a) and (12b) become
[] = [ 1198702 minusradic1198701radic1198701 0 ] [119880119881] + [[
[0
11986111198813radic1198701]]] (17)
Let 119892(119880119881) = 11986111198813radic1198701 and 119891(119880119881) = 0Clearly it can be seen that
119891VVV = 0119891V119906119906 = 0119892VV119906 = 0119892119906119906119906 = 0119891119906119906 = 0119891119906V = 0119891VV = 0119892119906119906 = 0119892119906V = 0119892VV = 0
(18)
According to the Hopf bifurcation theorem [8] coeffi-cient a must not equal zero In this case the coefficient aequals zero therefore there is no Hopf bifurcation
Numerical simulations using (4a) and (4b) were per-formed to check the validity of this bifurcation analysisThe parameter space was divided into several regions usingbifurcation sets as shown in Figure 2 The commercial
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2
Velo
city
(ms
)
00100050 0015 002minus001minus0015 minus0005minus002Displacement (m)
Figure 3 Numerical simulation for region (I) for (1198701 1198702) = (002001)
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2Ve
loci
ty (m
s)
minus0015 minus001 minus0005 0 0005 001 0015 002minus002Displacement (m)
Figure 4 Numerical simulation for SC for (1198701 1198702) = (002 00)
package DIVPRK of IMSL in the FORTRAN subroutines formathematics applications was used to solve these ordinarydifferential equations [31] The resulting numerical simu-lations are presented in Figures 3ndash7 The results in eachparametric region are discussed below
Region (I) includes sources and a saddle If the initialconditions are in the neighborhood of the two sources thenthe mass is distant from the equilibrium points (Figure 3)At the boundary between regions (I) and (II) (ie in thebifurcation set SC (1198702 = 0 1198701 gt 0)) the systemis an integrable system with homoclinic orbits (Figure 4)Therefore if the damping term is disregarded then the systemis conservative In region (II) the system is not integrablewith two sinks and one saddle If the initial conditions arein the neighborhood of the saddle then the mass returns tothe two sinks which are stable points as time approachesinfinity (Figure 5) At the boundary between regions (II) and
Journal of Advanced Transportation 5
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2
Velo
city
(ms
)
minus002 minus001 minus0005 0 0005 001 0015 002minus0015Displacement (m)
Figure 5 Numerical simulation for region (II) for (11987011198702) = (002minus001)
minus1
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Velo
city
(ms
)
minus6 minus4 minus2 0 2 4 6 8minus8Displacement (m)
times10minus3
times10minus3
Figure 6 Numerical simulation for region (III) for (1198701 1198702) =(minus002 minus001)
(III) (ie in bifurcation set 119875minus) the two sinks move closerto the saddle as the parameters approach bifurcation set 119875minusand the stability region shrinks to zero In region (III) thetwo sinks disappear and the saddle (0 0) becomes a sinkThis is a supercritical pitchfork bifurcation with an attractingsink region (III) (Figure 6) From regions (III) to (V) theeigenvalues for the Jacobian matrix cross the imaginary axishowever there is no Hopf bifurcation This means that thedynamic behavior is linear which is a similar situation tothat when a stable equilibrium point becomes an unstableequilibrium point (Figure 7) Between region (V) and region(I) boundary 119875+ must be crossed This is called a subcriticalpitchfork bifurcation
In terms of the equilibria and Figure 2 1198701 determinesthe number of equilibrium points and 1198702 determines the
minus002 minus0015 minus001 minus0005 0 0005 001 0015 002Displacement (m)
times10minus3
minus4
minus3
minus2
minus1
0
1
2
3
4
Velo
city
(ms
)
Figure 7 Numerical simulation for region (V) for (1198701 1198702) =(minus002 001)
local behavior (eg stability or instability) and whetherthere are homoclinic orbits Clearly only a positive dampingcoefficient results in a stable system
4 Analytical Tools for Observing NonlinearDynamics in a Vehicle Suspension System
In (3) the amplitude of the road excitation 119886 equals005m We performed a series of numerical simulationsusing (3) to determine the characteristics of this systemDynamic behaviors can be more clearly observed over arange of parameter values in bifurcation diagrams which arewidely used to describe transitions from periodic motion tochaoticmotion in dynamic systemsThe resulting bifurcationdiagram is presented in Figure 8 This figure clearly showschaotic motion in region A Region C presents period-1motion and there is a stable equilibrium point In this regioneach response was characterized using a phase portrait aPoincare map (velocity versus phase angle) and a frequencyspectrum Figure 9 shows that the equilibrium point of thesystem is stable if parameter Ω exists in region C It is well-known that road excitation covers a wide range frequenciesand higher vehicle velocities increase excitation from theroad surface The range of human sensitivity to frequency isfrom 4 to 8Hz (about 2512 rads to 5024 rads) thereforewe limited this investigation to the case of Ω = 400 radsFigure 10 shows the periodic motion in the system in caseswhere the parameter exists in regionC (ieΩ = 82 rads andΩ = 40 rads) The amplitude of road excitation is defined as005m while the response of the system (even in periodicmotion) has an amplitude of near 035m (Figure 9) Clearlythis response is not acceptable When parameter Ω existsin region B quasiperiodic motion occurs in this regionAs shown in Figures 11ndash13 the quasiperiodic trajectoryis restricted to an annular-like region of the state spaceand differs considerably from periodic trajectories When
6 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
Ω (rads)40353025201510
Region C(periodic motion)
(a)
Velo
city
(ms
)
4
2
0
Ω (rads)82582815818058795
Region B(quasiperiodic motion)
Region A(chaotic motion)
Region C(periodic motion)
(quasiperiodic motion) Region C(periodic mo
(b)
Figure 8 Bifurcation diagram for the system when the amplitude of the road excitation 119886 is 005m (a) Ω = 796 rads to 40 rads (b) Ω =796 rads to 825 rads
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
3
28
26
24
22
Phase angle0850807507
(b)
Velo
city
(ms
)
Ω (rads)
3
2
1
020151050
(c)
Figure 9 The period-one orbit at Ω = 82 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
Displacement (m)0080060040020minus002minus004minus006minus008
minus2
minus1
0
1
2
(b)
Figure 10 Phase portrait (a)Ω = 82 rads (b)Ω = 40 rads
Journal of Advanced Transportation 7
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
2
15
1
0
05
20151050
(c)
Figure 11 Quasiperiodic orbit at Ω = 80 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Ω = 80 805 or 815 the system exhibits a quasiperiodicmotion and the map forms a continuous closed orbit in thePoincare section as shown in Figures 11ndash13 As the forcingfrequency (Ω) continues decreasing into regionA (Figure 14)chaotic motion produces chatter vibration The transitionsequence for the system in this paper is from periodic motionto quasiperiodic motion and finally to chaotic motion Theparticular features of these two descriptors characterize thechaotic behavior The Poincare map contains an infinite setof points which are referred to as a strange attractor Thefrequency spectrum of the chaotic motion is a continu-ous broad spectrum The strange attractor and continuousFourier spectrum are strong indicators of chaos Figure 14shows clear indications of chaotic behavior in region AFigures 14(a)ndash14(c) respectively show the phase portraits thePoincare maps and frequency spectra
5 Analysis of Chaotic Phenomena LyapunovExponent and Lyapunov Dimension
The analysis presented in Section 4 is insufficient to confi-dently identify chaotic motion in a suspension system In thissection we adopt Lyapunov exponents to verify the existenceof chaotic motion In every dynamic system the spectrumof Lyapunov exponents (120582) [20] indicates variations in thelengths areas and volumes of the phase space Verifying theexistence of chaos requires calculation of only the largestexponent to indicate whether nearby trajectories diverge
(120582 gt 0) or converge (120582 lt 0) on average Any boundedmotionwithin a system that has at least one positive Lyapunovexponent is defined as chaotic The Lyapunov exponents forperiodic motion are not positive
Figure 15 plots the evolution of the largest Lyapunovexponent in a suspension system This value is computedusing the algorithm presented by Wolf et al [20] Figure 14shows that chaotic motion began at approximately Ω =7965 rads because at point (1198751) the sign of the largestLyapunov exponent changed from negative to positive as theparameterΩ slowly decreased Between points1198751 and1198752 thelargest Lyapunov exponent approached zeroThe existence ofa forcing frequency Ω in these regions denotes the motionin the system as quasiperiodic When the value of Ω isgreater than 1198751 (such as when Ω = 82 rads) the Lyapunovexponents obtained using (3) are 1205821 = minus00010375 and 1205822 =minus00013232The sum of these values is 1205821+1205822 = minus00023607this negative value demonstrates that the motion of massat these values eventually converges to a stable limit cycleUsing the Lyapunov exponents for a dynamical system where1205821 ge sdot sdot sdot ge 120582119899 Kaplan and Yorke [32] provided an estimationof the Lyapunov dimension 119889119871 as follows
119889119871 = 119895 + 110038161003816100381610038161003816120582119895+110038161003816100381610038161003816119895sum119894=1
120582119894 (19)
where 119895 is the largest integer that satisfies sum119895119894=1 120582119894 gt 0This technique yields a Lyapunov dimension of 119889119871 = 1 for
8 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
minus4
minus2
04020minus02minus06 minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
06 07 08 09Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
1
0
05
20151050
(c)
Figure 12 Quasiperiodic orbit at Ω = 805 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
Velo
city
(ms
)
2
25
3
07 075 08Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
25
1
0
05
20151050
(c)
Figure 13 Quasiperiodic orbit at Ω = 815 rads (a) the phase portrait (b) the Poincare map and (c) frequency spectrum
Journal of Advanced Transportation 9
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
5
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
1
0
05
20151050
(c)
Figure 14 Chaotic motion at Ω = 7964 rads (a) the phase portrait (b) Poincare map and (c) the frequency spectrum
8 805 81 815 82 825Ω (rads)
minus003
minus0025
minus002
minus0015
minus001
minus0005
0
0005
001
Larg
est L
yapu
nov
expo
nent
P2 P1
Figure 15 Evolution of the largest Lyapunov exponent
Ω = 82 rads The fact that the Lyapunov dimension is aninteger means that the system has periodic motion Whenparameter Ω increases beyond the bifurcation point (such aswhen Ω = 7964 rads) the Lyapunov exponents are 1205821 =00054396 and 1205822 = minus0092153 and the Lyapunov dimensionis 119889119871 = 1059 In this case the Lyapunov dimension is notan integer indicating that the system exhibits chaotic mo-tion
6 Controlling Chaos
Improving the performance of a dynamic system andoravoiding chaotic behavior require periodic motion whichis more important when working under specific conditionsCai et al [26] suggested a simple effective control methodthat converts chaotic motions into periodic motion usingthe linear state feedback as a system variable This approach
10 Journal of Advanced Transportation
G = minus014
minus045 minus04 minus035 minus03 minus025 minus02 minus015 minus01 minus005 0minus05Feedback gain G
minus05minus04minus03minus02minus01
00102030405
Disp
lace
men
t (m
)
Figure 16The bifurcation diagram for a system with state feedbackcontrol where 119866 denotes the feedback gain
to achieving an n-dimensional dynamic system is explainedbriefly as follows
= 119891 (119909 119905) (20)
where 119909(119905) isin 119877119899 is the state vector and 119891 =(1198911 119891119894 119891119899) where 119891119894 is a linear or a nonlinearfunction and 119891 includes at least one nonlinear function If119891119896(119909 119905) is a nonlinear function that gives chaotic motionin (20) then only one term of the state feedback for theavailable system variable 119909119898 is added to the equation thatincludes 119891119896 as follows
119896 = 119891119896 (119909 119905) + 119866119909119898 119896 119898 isin 1 2 119899 (21)
where119866 is the feedback gain Other functions remain in theiroriginal forms
System (3) with state feedback control can be written asfollows
1198891199101119889119905 = 11991021198891199102119889119905 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023
+ 119886Ω2 sin (Ω119905) + 1198661199102(22)
In the absence of state feedback control G = 0 and (3)describes chaotic motion when Ω = 7964 rads Figure 16shows the resulting bifurcation diagram for a system withstate feedback control This figure clearly shows that chaoticmotion occurs at approximately 119866 gt minus014 and disappearsat approximately 119866 le minus014 When feedback gain 119866 fallsbelow minus014 stable periodic motion occurs As shown inFigure 17 a control signal is applied to the system at 35 s togovern the chaotic oscillation In this manner state feedbackcontrol can be used to suppress chaotic motion and improvethe performance of a vehiclersquos suspension system The form
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
ControlledUncontrolled
Velo
city
(ms
) 5
0
minus5
Time (sec)80706050403020100
(b)
Figure 17 Transforming chaotic motion to a desired period-oneorbit for 119866 = minus03 and Ω = 7964 rads (a) the phase portraitfor the controlled system when the state feedback control signal isintroduced after 35 s and (b) the time responses of the velocity
of the control gain in the original system equation (1) is asfollows
119866 = 119866 sdot 119898 (23)
The physical meaning of gain 119866 is control gain and the unitof the gain is Nsdotskgsdotm
In many general systems that involve chaotic dynamicsthis state feedback technique does not require preliminaryor on-line analysis of the system dynamics and can beimplemented by adding the feedback of a suitable variable tothe original system with sufficient control gain to suppressthe development of chaos In this regard the state feedbackcontrol technique is simple and effective approach to chaossuppression
7 Conclusions
This study examined the nonlinear dynamic behavior ina vehicle suspension system with hysteretic damping Ourobjective was to develop a method to control chaotic vibra-tion Dynamic behavior was observed over the entire rangeof parameter values of the bifurcation sets and bifurca-tion diagram Using bifurcation analysis we identified acodimension-two bifurcation structure with double-zerodegeneracy in the system The bifurcation diagram indicatesthe existence of quasiperiodic orbit and chaotic motionthereby demonstrating the effectiveness of using Lyapunovexponents as a tool for identifying chaoticmotion Finally weproposed a state feedback control method to suppress chaoticmotions and improve the ride provided by an automotivesuspension system Simulation results confirm the feasibilityof the proposed method Our results provide insight intothe operating conditions under which undesirable dynamicmotion takes place in vehicle suspension systems Our results
Journal of Advanced Transportation 11
also provide a useful reference for engineers involved in thedesign of control systems for vehicle suspensions It shouldbe noted that in practical engineering phenomena such asactuator faults time-varying delays unmodeled dynamicsand dynamics disturbances often occur simultaneously andthese problems are beyond the scope of the current study Infuture work we will seek to control nonlinear systems withtime-varying delays
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The authors would like to thank the Ministry of Science andTechnology of the Republic of China Taiwan for financiallysupporting this research under Contract noMOST 105-2221-E-212-016
References
[1] H Chen Z-Y Liu and P-Y Sun ldquoApplication of constrainedscript Hinfin control to active suspension systems on half-carmodelsrdquo Journal of Dynamic Systems Measurement and Con-trol vol 127 no 3 pp 345ndash354 2005
[2] X Song M Ahmadian S Southward and L Miller ldquoParamet-ric study of nonlinear adaptive control algorithmwithmagneto-rheological suspension systemsrdquo Communications in NonlinearScience and Numerical Simulation vol 12 no 4 pp 584ndash6072007
[3] L-M Gui W-K Shi and W Liu ldquoA semi-active suspensiondesign for off-road vehicle base on Magneto-rheological tech-nologyrdquo in Proceedings of the 2012 9th International Conferenceon Fuzzy Systems and Knowledge Discovery FSKD 2012 pp2565ndash2568 China May 2012
[4] F Tu Q Yang C He and L Wang ldquoExperimental Study andDesign on Automobile SuspensionMade of Magneto-Rheolog-ical Damperrdquo in Proceedings of the International Conference onFuture Energy Environment andMaterials FEEM2012 pp 417ndash425 Hong Kong April 2012
[5] P W Nugroho H Du W Li and G Alici ldquoImplementation ofAdaptive Neuro Fuzzy Inference System controller on magnetorheological damper suspensionrdquo in Proceedings of the 2013IEEEASME International Conference on Advanced IntelligentMechatronicsMechatronics forHumanWellbeing AIM2013 pp1399ndash1403 Australia July 2013
[6] Arnold VI Geometric Methods in the Theory of OrdinaryDifferential Equations New York Springer-Verlag 1988
[7] P J Holmes ldquoBifurcations to divergence and flutter in flow-induced oscillations a finite dimensional analysisrdquo Journal ofSound and Vibration vol 53 no 4 pp 471ndash503 1977
[8] J Guckenheimer and P J Holmes Nonlinear OscillationsDynamical System and Bifurcation of Vector Fields Springer-Verlag New York 2013
[9] C-Y Tseng and P-C Tung ldquoDynamics of nonlinear structurewithmagnetic actuatorrdquo Japanese Journal of Applied Physics vol34 no 1 pp 374ndash382 1995
[10] K Yagasaki ldquoCodimension-two bifurcations in a pendulumwith feedback controlrdquo International Journal of Non-LinearMechanics vol 34 no 6 pp 983ndash1002 1999
[11] R Tian Q Cao and S Yang ldquoThe codimension-two bifurcationfor the recent proposed SD oscillatorrdquoNonlinear Dynamics vol59 no 1-2 pp 19ndash27 2010
[12] S Yin P Shi and H Yang ldquoAdaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems With UnmodeledDynamicsrdquo IEEE Transactions on Cybernetics vol 46 no 8 pp1926ndash1938 2016
[13] S Yin H Yang H Gao J Qiu and O Kaynak ldquoAn adaptiveNN-based approach for fault-tolerant control of nonlineartime-varying delay systems with unmodeled dynamicsrdquo IEEETransactions on Neural Networks and Learning Systems vol 28no 8 pp 1902ndash1913 2017
[14] S Li S Yang and W Guo ldquoInvestigation on chaotic motion inhysteretic non-linear suspension system with multi-frequencyexcitationsrdquoMechanics Research Communications vol 31 no 2pp 229ndash236 2004
[15] R D Naik and P M Singru ldquoResonance stability and chaoticvibration of a quarter-car vehicle model with time-delay feed-backrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 8 pp 3397ndash3410 2011
[16] M Borowiec G Litak and M I Friswell ldquoNonlinear responseof an oscillator with a magneto-rheological damper subjectedto external forcingrdquo Applied Mechanics and Materials vol 5-6pp 277ndash284 2006
[17] G Litak M Borowiec M I Friswell and K Szabelski ldquoChaoticvibration of a quarter-car model excited by the road surfaceprofilerdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 7 pp 1373ndash1383 2008
[18] J Marzbanrad and A Keshavarzi ldquoChaotic vibrations of anonlinear air suspension system under consecutive half sinespeed bumprdquo Indian Journal of Science and Technology vol 8pp 72ndash84 2015
[19] J Marzbanrad and A Keshavarzi ldquoA Chaotic viewpoint on aquarter-car air suspension model with numerical and experi-mental analysis[J]rdquo Journal of Cahiers Des Sciences vol 23 2014
[20] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[21] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[22] E R Hunt ldquoStabilizing high-period orbits in a chaotic systemthe diode resonatorrdquo Physical Review Letters vol 67 no 15 pp1953ndash1955 1991
[23] C Cai Z XuW Xu and B Feng ldquoNotch filter feedback controlin a class of chaotic systemsrdquoAutomatica vol 38 no 4 pp 695ndash701 2002
[24] G Litak M Borowiec M Ali L M Saha and M I FriswellldquoPulsive feedback control of a quarter car model forced by aroad profilerdquo Chaos Solitons amp Fractals vol 33 no 5 pp 1672ndash1676 2007
[25] H Du K Y Sze and J Lam ldquoSemi-active 119867infin control ofvehicle suspensionwithmagneto-rheological dampersrdquo Journalof Sound and Vibration vol 283 no 3ndash5 pp 981ndash996 2005
[26] C Cai Z Xu and W Xu ldquoConverting chaos into periodicmotion by state feedback controlrdquo Automatica vol 38 no 11pp 1927ndash1933 2002
[27] M Ashkenazi and S-N Chow ldquoNormal forms near criticalpoints for differential equations and mapsrdquo IEEE Transactions
12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

4 Journal of Advanced Transportation
Region (V) Region (I)
Region (III) Region (II)
K2
P+
Pminus
K1SC
Figure 2The bifurcation sets that are associated with typical phaseportraits in each region where 119875+ represents a subcritical pitchfork119875minus represents a supercritical pitchfork and SC represents a homo-clinic bifurcation
The eigenvalues for DF(0 0) are120582 = plusmnradic1198701119894 (15)
For the following change in coordinates
[11991011199102] = [ 0 0minusradic1198701 0] [
119880119881] (16)
Equations (12a) and (12b) become
[] = [ 1198702 minusradic1198701radic1198701 0 ] [119880119881] + [[
[0
11986111198813radic1198701]]] (17)
Let 119892(119880119881) = 11986111198813radic1198701 and 119891(119880119881) = 0Clearly it can be seen that
119891VVV = 0119891V119906119906 = 0119892VV119906 = 0119892119906119906119906 = 0119891119906119906 = 0119891119906V = 0119891VV = 0119892119906119906 = 0119892119906V = 0119892VV = 0
(18)
According to the Hopf bifurcation theorem [8] coeffi-cient a must not equal zero In this case the coefficient aequals zero therefore there is no Hopf bifurcation
Numerical simulations using (4a) and (4b) were per-formed to check the validity of this bifurcation analysisThe parameter space was divided into several regions usingbifurcation sets as shown in Figure 2 The commercial
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2
Velo
city
(ms
)
00100050 0015 002minus001minus0015 minus0005minus002Displacement (m)
Figure 3 Numerical simulation for region (I) for (1198701 1198702) = (002001)
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2Ve
loci
ty (m
s)
minus0015 minus001 minus0005 0 0005 001 0015 002minus002Displacement (m)
Figure 4 Numerical simulation for SC for (1198701 1198702) = (002 00)
package DIVPRK of IMSL in the FORTRAN subroutines formathematics applications was used to solve these ordinarydifferential equations [31] The resulting numerical simu-lations are presented in Figures 3ndash7 The results in eachparametric region are discussed below
Region (I) includes sources and a saddle If the initialconditions are in the neighborhood of the two sources thenthe mass is distant from the equilibrium points (Figure 3)At the boundary between regions (I) and (II) (ie in thebifurcation set SC (1198702 = 0 1198701 gt 0)) the systemis an integrable system with homoclinic orbits (Figure 4)Therefore if the damping term is disregarded then the systemis conservative In region (II) the system is not integrablewith two sinks and one saddle If the initial conditions arein the neighborhood of the saddle then the mass returns tothe two sinks which are stable points as time approachesinfinity (Figure 5) At the boundary between regions (II) and
Journal of Advanced Transportation 5
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2
Velo
city
(ms
)
minus002 minus001 minus0005 0 0005 001 0015 002minus0015Displacement (m)
Figure 5 Numerical simulation for region (II) for (11987011198702) = (002minus001)
minus1
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Velo
city
(ms
)
minus6 minus4 minus2 0 2 4 6 8minus8Displacement (m)
times10minus3
times10minus3
Figure 6 Numerical simulation for region (III) for (1198701 1198702) =(minus002 minus001)
(III) (ie in bifurcation set 119875minus) the two sinks move closerto the saddle as the parameters approach bifurcation set 119875minusand the stability region shrinks to zero In region (III) thetwo sinks disappear and the saddle (0 0) becomes a sinkThis is a supercritical pitchfork bifurcation with an attractingsink region (III) (Figure 6) From regions (III) to (V) theeigenvalues for the Jacobian matrix cross the imaginary axishowever there is no Hopf bifurcation This means that thedynamic behavior is linear which is a similar situation tothat when a stable equilibrium point becomes an unstableequilibrium point (Figure 7) Between region (V) and region(I) boundary 119875+ must be crossed This is called a subcriticalpitchfork bifurcation
In terms of the equilibria and Figure 2 1198701 determinesthe number of equilibrium points and 1198702 determines the
minus002 minus0015 minus001 minus0005 0 0005 001 0015 002Displacement (m)
times10minus3
minus4
minus3
minus2
minus1
0
1
2
3
4
Velo
city
(ms
)
Figure 7 Numerical simulation for region (V) for (1198701 1198702) =(minus002 001)
local behavior (eg stability or instability) and whetherthere are homoclinic orbits Clearly only a positive dampingcoefficient results in a stable system
4 Analytical Tools for Observing NonlinearDynamics in a Vehicle Suspension System
In (3) the amplitude of the road excitation 119886 equals005m We performed a series of numerical simulationsusing (3) to determine the characteristics of this systemDynamic behaviors can be more clearly observed over arange of parameter values in bifurcation diagrams which arewidely used to describe transitions from periodic motion tochaoticmotion in dynamic systemsThe resulting bifurcationdiagram is presented in Figure 8 This figure clearly showschaotic motion in region A Region C presents period-1motion and there is a stable equilibrium point In this regioneach response was characterized using a phase portrait aPoincare map (velocity versus phase angle) and a frequencyspectrum Figure 9 shows that the equilibrium point of thesystem is stable if parameter Ω exists in region C It is well-known that road excitation covers a wide range frequenciesand higher vehicle velocities increase excitation from theroad surface The range of human sensitivity to frequency isfrom 4 to 8Hz (about 2512 rads to 5024 rads) thereforewe limited this investigation to the case of Ω = 400 radsFigure 10 shows the periodic motion in the system in caseswhere the parameter exists in regionC (ieΩ = 82 rads andΩ = 40 rads) The amplitude of road excitation is defined as005m while the response of the system (even in periodicmotion) has an amplitude of near 035m (Figure 9) Clearlythis response is not acceptable When parameter Ω existsin region B quasiperiodic motion occurs in this regionAs shown in Figures 11ndash13 the quasiperiodic trajectoryis restricted to an annular-like region of the state spaceand differs considerably from periodic trajectories When
6 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
Ω (rads)40353025201510
Region C(periodic motion)
(a)
Velo
city
(ms
)
4
2
0
Ω (rads)82582815818058795
Region B(quasiperiodic motion)
Region A(chaotic motion)
Region C(periodic motion)
(quasiperiodic motion) Region C(periodic mo
(b)
Figure 8 Bifurcation diagram for the system when the amplitude of the road excitation 119886 is 005m (a) Ω = 796 rads to 40 rads (b) Ω =796 rads to 825 rads
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
3
28
26
24
22
Phase angle0850807507
(b)
Velo
city
(ms
)
Ω (rads)
3
2
1
020151050
(c)
Figure 9 The period-one orbit at Ω = 82 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
Displacement (m)0080060040020minus002minus004minus006minus008
minus2
minus1
0
1
2
(b)
Figure 10 Phase portrait (a)Ω = 82 rads (b)Ω = 40 rads
Journal of Advanced Transportation 7
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
2
15
1
0
05
20151050
(c)
Figure 11 Quasiperiodic orbit at Ω = 80 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Ω = 80 805 or 815 the system exhibits a quasiperiodicmotion and the map forms a continuous closed orbit in thePoincare section as shown in Figures 11ndash13 As the forcingfrequency (Ω) continues decreasing into regionA (Figure 14)chaotic motion produces chatter vibration The transitionsequence for the system in this paper is from periodic motionto quasiperiodic motion and finally to chaotic motion Theparticular features of these two descriptors characterize thechaotic behavior The Poincare map contains an infinite setof points which are referred to as a strange attractor Thefrequency spectrum of the chaotic motion is a continu-ous broad spectrum The strange attractor and continuousFourier spectrum are strong indicators of chaos Figure 14shows clear indications of chaotic behavior in region AFigures 14(a)ndash14(c) respectively show the phase portraits thePoincare maps and frequency spectra
5 Analysis of Chaotic Phenomena LyapunovExponent and Lyapunov Dimension
The analysis presented in Section 4 is insufficient to confi-dently identify chaotic motion in a suspension system In thissection we adopt Lyapunov exponents to verify the existenceof chaotic motion In every dynamic system the spectrumof Lyapunov exponents (120582) [20] indicates variations in thelengths areas and volumes of the phase space Verifying theexistence of chaos requires calculation of only the largestexponent to indicate whether nearby trajectories diverge
(120582 gt 0) or converge (120582 lt 0) on average Any boundedmotionwithin a system that has at least one positive Lyapunovexponent is defined as chaotic The Lyapunov exponents forperiodic motion are not positive
Figure 15 plots the evolution of the largest Lyapunovexponent in a suspension system This value is computedusing the algorithm presented by Wolf et al [20] Figure 14shows that chaotic motion began at approximately Ω =7965 rads because at point (1198751) the sign of the largestLyapunov exponent changed from negative to positive as theparameterΩ slowly decreased Between points1198751 and1198752 thelargest Lyapunov exponent approached zeroThe existence ofa forcing frequency Ω in these regions denotes the motionin the system as quasiperiodic When the value of Ω isgreater than 1198751 (such as when Ω = 82 rads) the Lyapunovexponents obtained using (3) are 1205821 = minus00010375 and 1205822 =minus00013232The sum of these values is 1205821+1205822 = minus00023607this negative value demonstrates that the motion of massat these values eventually converges to a stable limit cycleUsing the Lyapunov exponents for a dynamical system where1205821 ge sdot sdot sdot ge 120582119899 Kaplan and Yorke [32] provided an estimationof the Lyapunov dimension 119889119871 as follows
119889119871 = 119895 + 110038161003816100381610038161003816120582119895+110038161003816100381610038161003816119895sum119894=1
120582119894 (19)
where 119895 is the largest integer that satisfies sum119895119894=1 120582119894 gt 0This technique yields a Lyapunov dimension of 119889119871 = 1 for
8 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
minus4
minus2
04020minus02minus06 minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
06 07 08 09Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
1
0
05
20151050
(c)
Figure 12 Quasiperiodic orbit at Ω = 805 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
Velo
city
(ms
)
2
25
3
07 075 08Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
25
1
0
05
20151050
(c)
Figure 13 Quasiperiodic orbit at Ω = 815 rads (a) the phase portrait (b) the Poincare map and (c) frequency spectrum
Journal of Advanced Transportation 9
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
5
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
1
0
05
20151050
(c)
Figure 14 Chaotic motion at Ω = 7964 rads (a) the phase portrait (b) Poincare map and (c) the frequency spectrum
8 805 81 815 82 825Ω (rads)
minus003
minus0025
minus002
minus0015
minus001
minus0005
0
0005
001
Larg
est L
yapu
nov
expo
nent
P2 P1
Figure 15 Evolution of the largest Lyapunov exponent
Ω = 82 rads The fact that the Lyapunov dimension is aninteger means that the system has periodic motion Whenparameter Ω increases beyond the bifurcation point (such aswhen Ω = 7964 rads) the Lyapunov exponents are 1205821 =00054396 and 1205822 = minus0092153 and the Lyapunov dimensionis 119889119871 = 1059 In this case the Lyapunov dimension is notan integer indicating that the system exhibits chaotic mo-tion
6 Controlling Chaos
Improving the performance of a dynamic system andoravoiding chaotic behavior require periodic motion whichis more important when working under specific conditionsCai et al [26] suggested a simple effective control methodthat converts chaotic motions into periodic motion usingthe linear state feedback as a system variable This approach
10 Journal of Advanced Transportation
G = minus014
minus045 minus04 minus035 minus03 minus025 minus02 minus015 minus01 minus005 0minus05Feedback gain G
minus05minus04minus03minus02minus01
00102030405
Disp
lace
men
t (m
)
Figure 16The bifurcation diagram for a system with state feedbackcontrol where 119866 denotes the feedback gain
to achieving an n-dimensional dynamic system is explainedbriefly as follows
= 119891 (119909 119905) (20)
where 119909(119905) isin 119877119899 is the state vector and 119891 =(1198911 119891119894 119891119899) where 119891119894 is a linear or a nonlinearfunction and 119891 includes at least one nonlinear function If119891119896(119909 119905) is a nonlinear function that gives chaotic motionin (20) then only one term of the state feedback for theavailable system variable 119909119898 is added to the equation thatincludes 119891119896 as follows
119896 = 119891119896 (119909 119905) + 119866119909119898 119896 119898 isin 1 2 119899 (21)
where119866 is the feedback gain Other functions remain in theiroriginal forms
System (3) with state feedback control can be written asfollows
1198891199101119889119905 = 11991021198891199102119889119905 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023
+ 119886Ω2 sin (Ω119905) + 1198661199102(22)
In the absence of state feedback control G = 0 and (3)describes chaotic motion when Ω = 7964 rads Figure 16shows the resulting bifurcation diagram for a system withstate feedback control This figure clearly shows that chaoticmotion occurs at approximately 119866 gt minus014 and disappearsat approximately 119866 le minus014 When feedback gain 119866 fallsbelow minus014 stable periodic motion occurs As shown inFigure 17 a control signal is applied to the system at 35 s togovern the chaotic oscillation In this manner state feedbackcontrol can be used to suppress chaotic motion and improvethe performance of a vehiclersquos suspension system The form
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
ControlledUncontrolled
Velo
city
(ms
) 5
0
minus5
Time (sec)80706050403020100
(b)
Figure 17 Transforming chaotic motion to a desired period-oneorbit for 119866 = minus03 and Ω = 7964 rads (a) the phase portraitfor the controlled system when the state feedback control signal isintroduced after 35 s and (b) the time responses of the velocity
of the control gain in the original system equation (1) is asfollows
119866 = 119866 sdot 119898 (23)
The physical meaning of gain 119866 is control gain and the unitof the gain is Nsdotskgsdotm
In many general systems that involve chaotic dynamicsthis state feedback technique does not require preliminaryor on-line analysis of the system dynamics and can beimplemented by adding the feedback of a suitable variable tothe original system with sufficient control gain to suppressthe development of chaos In this regard the state feedbackcontrol technique is simple and effective approach to chaossuppression
7 Conclusions
This study examined the nonlinear dynamic behavior ina vehicle suspension system with hysteretic damping Ourobjective was to develop a method to control chaotic vibra-tion Dynamic behavior was observed over the entire rangeof parameter values of the bifurcation sets and bifurca-tion diagram Using bifurcation analysis we identified acodimension-two bifurcation structure with double-zerodegeneracy in the system The bifurcation diagram indicatesthe existence of quasiperiodic orbit and chaotic motionthereby demonstrating the effectiveness of using Lyapunovexponents as a tool for identifying chaoticmotion Finally weproposed a state feedback control method to suppress chaoticmotions and improve the ride provided by an automotivesuspension system Simulation results confirm the feasibilityof the proposed method Our results provide insight intothe operating conditions under which undesirable dynamicmotion takes place in vehicle suspension systems Our results
Journal of Advanced Transportation 11
also provide a useful reference for engineers involved in thedesign of control systems for vehicle suspensions It shouldbe noted that in practical engineering phenomena such asactuator faults time-varying delays unmodeled dynamicsand dynamics disturbances often occur simultaneously andthese problems are beyond the scope of the current study Infuture work we will seek to control nonlinear systems withtime-varying delays
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The authors would like to thank the Ministry of Science andTechnology of the Republic of China Taiwan for financiallysupporting this research under Contract noMOST 105-2221-E-212-016
References
[1] H Chen Z-Y Liu and P-Y Sun ldquoApplication of constrainedscript Hinfin control to active suspension systems on half-carmodelsrdquo Journal of Dynamic Systems Measurement and Con-trol vol 127 no 3 pp 345ndash354 2005
[2] X Song M Ahmadian S Southward and L Miller ldquoParamet-ric study of nonlinear adaptive control algorithmwithmagneto-rheological suspension systemsrdquo Communications in NonlinearScience and Numerical Simulation vol 12 no 4 pp 584ndash6072007
[3] L-M Gui W-K Shi and W Liu ldquoA semi-active suspensiondesign for off-road vehicle base on Magneto-rheological tech-nologyrdquo in Proceedings of the 2012 9th International Conferenceon Fuzzy Systems and Knowledge Discovery FSKD 2012 pp2565ndash2568 China May 2012
[4] F Tu Q Yang C He and L Wang ldquoExperimental Study andDesign on Automobile SuspensionMade of Magneto-Rheolog-ical Damperrdquo in Proceedings of the International Conference onFuture Energy Environment andMaterials FEEM2012 pp 417ndash425 Hong Kong April 2012
[5] P W Nugroho H Du W Li and G Alici ldquoImplementation ofAdaptive Neuro Fuzzy Inference System controller on magnetorheological damper suspensionrdquo in Proceedings of the 2013IEEEASME International Conference on Advanced IntelligentMechatronicsMechatronics forHumanWellbeing AIM2013 pp1399ndash1403 Australia July 2013
[6] Arnold VI Geometric Methods in the Theory of OrdinaryDifferential Equations New York Springer-Verlag 1988
[7] P J Holmes ldquoBifurcations to divergence and flutter in flow-induced oscillations a finite dimensional analysisrdquo Journal ofSound and Vibration vol 53 no 4 pp 471ndash503 1977
[8] J Guckenheimer and P J Holmes Nonlinear OscillationsDynamical System and Bifurcation of Vector Fields Springer-Verlag New York 2013
[9] C-Y Tseng and P-C Tung ldquoDynamics of nonlinear structurewithmagnetic actuatorrdquo Japanese Journal of Applied Physics vol34 no 1 pp 374ndash382 1995
[10] K Yagasaki ldquoCodimension-two bifurcations in a pendulumwith feedback controlrdquo International Journal of Non-LinearMechanics vol 34 no 6 pp 983ndash1002 1999
[11] R Tian Q Cao and S Yang ldquoThe codimension-two bifurcationfor the recent proposed SD oscillatorrdquoNonlinear Dynamics vol59 no 1-2 pp 19ndash27 2010
[12] S Yin P Shi and H Yang ldquoAdaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems With UnmodeledDynamicsrdquo IEEE Transactions on Cybernetics vol 46 no 8 pp1926ndash1938 2016
[13] S Yin H Yang H Gao J Qiu and O Kaynak ldquoAn adaptiveNN-based approach for fault-tolerant control of nonlineartime-varying delay systems with unmodeled dynamicsrdquo IEEETransactions on Neural Networks and Learning Systems vol 28no 8 pp 1902ndash1913 2017
[14] S Li S Yang and W Guo ldquoInvestigation on chaotic motion inhysteretic non-linear suspension system with multi-frequencyexcitationsrdquoMechanics Research Communications vol 31 no 2pp 229ndash236 2004
[15] R D Naik and P M Singru ldquoResonance stability and chaoticvibration of a quarter-car vehicle model with time-delay feed-backrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 8 pp 3397ndash3410 2011
[16] M Borowiec G Litak and M I Friswell ldquoNonlinear responseof an oscillator with a magneto-rheological damper subjectedto external forcingrdquo Applied Mechanics and Materials vol 5-6pp 277ndash284 2006
[17] G Litak M Borowiec M I Friswell and K Szabelski ldquoChaoticvibration of a quarter-car model excited by the road surfaceprofilerdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 7 pp 1373ndash1383 2008
[18] J Marzbanrad and A Keshavarzi ldquoChaotic vibrations of anonlinear air suspension system under consecutive half sinespeed bumprdquo Indian Journal of Science and Technology vol 8pp 72ndash84 2015
[19] J Marzbanrad and A Keshavarzi ldquoA Chaotic viewpoint on aquarter-car air suspension model with numerical and experi-mental analysis[J]rdquo Journal of Cahiers Des Sciences vol 23 2014
[20] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[21] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[22] E R Hunt ldquoStabilizing high-period orbits in a chaotic systemthe diode resonatorrdquo Physical Review Letters vol 67 no 15 pp1953ndash1955 1991
[23] C Cai Z XuW Xu and B Feng ldquoNotch filter feedback controlin a class of chaotic systemsrdquoAutomatica vol 38 no 4 pp 695ndash701 2002
[24] G Litak M Borowiec M Ali L M Saha and M I FriswellldquoPulsive feedback control of a quarter car model forced by aroad profilerdquo Chaos Solitons amp Fractals vol 33 no 5 pp 1672ndash1676 2007
[25] H Du K Y Sze and J Lam ldquoSemi-active 119867infin control ofvehicle suspensionwithmagneto-rheological dampersrdquo Journalof Sound and Vibration vol 283 no 3ndash5 pp 981ndash996 2005
[26] C Cai Z Xu and W Xu ldquoConverting chaos into periodicmotion by state feedback controlrdquo Automatica vol 38 no 11pp 1927ndash1933 2002
[27] M Ashkenazi and S-N Chow ldquoNormal forms near criticalpoints for differential equations and mapsrdquo IEEE Transactions
12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 5
times10minus3
minus2
minus15
minus1
minus05
0
05
1
15
2
Velo
city
(ms
)
minus002 minus001 minus0005 0 0005 001 0015 002minus0015Displacement (m)
Figure 5 Numerical simulation for region (II) for (11987011198702) = (002minus001)
minus1
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Velo
city
(ms
)
minus6 minus4 minus2 0 2 4 6 8minus8Displacement (m)
times10minus3
times10minus3
Figure 6 Numerical simulation for region (III) for (1198701 1198702) =(minus002 minus001)
(III) (ie in bifurcation set 119875minus) the two sinks move closerto the saddle as the parameters approach bifurcation set 119875minusand the stability region shrinks to zero In region (III) thetwo sinks disappear and the saddle (0 0) becomes a sinkThis is a supercritical pitchfork bifurcation with an attractingsink region (III) (Figure 6) From regions (III) to (V) theeigenvalues for the Jacobian matrix cross the imaginary axishowever there is no Hopf bifurcation This means that thedynamic behavior is linear which is a similar situation tothat when a stable equilibrium point becomes an unstableequilibrium point (Figure 7) Between region (V) and region(I) boundary 119875+ must be crossed This is called a subcriticalpitchfork bifurcation
In terms of the equilibria and Figure 2 1198701 determinesthe number of equilibrium points and 1198702 determines the
minus002 minus0015 minus001 minus0005 0 0005 001 0015 002Displacement (m)
times10minus3
minus4
minus3
minus2
minus1
0
1
2
3
4
Velo
city
(ms
)
Figure 7 Numerical simulation for region (V) for (1198701 1198702) =(minus002 001)
local behavior (eg stability or instability) and whetherthere are homoclinic orbits Clearly only a positive dampingcoefficient results in a stable system
4 Analytical Tools for Observing NonlinearDynamics in a Vehicle Suspension System
In (3) the amplitude of the road excitation 119886 equals005m We performed a series of numerical simulationsusing (3) to determine the characteristics of this systemDynamic behaviors can be more clearly observed over arange of parameter values in bifurcation diagrams which arewidely used to describe transitions from periodic motion tochaoticmotion in dynamic systemsThe resulting bifurcationdiagram is presented in Figure 8 This figure clearly showschaotic motion in region A Region C presents period-1motion and there is a stable equilibrium point In this regioneach response was characterized using a phase portrait aPoincare map (velocity versus phase angle) and a frequencyspectrum Figure 9 shows that the equilibrium point of thesystem is stable if parameter Ω exists in region C It is well-known that road excitation covers a wide range frequenciesand higher vehicle velocities increase excitation from theroad surface The range of human sensitivity to frequency isfrom 4 to 8Hz (about 2512 rads to 5024 rads) thereforewe limited this investigation to the case of Ω = 400 radsFigure 10 shows the periodic motion in the system in caseswhere the parameter exists in regionC (ieΩ = 82 rads andΩ = 40 rads) The amplitude of road excitation is defined as005m while the response of the system (even in periodicmotion) has an amplitude of near 035m (Figure 9) Clearlythis response is not acceptable When parameter Ω existsin region B quasiperiodic motion occurs in this regionAs shown in Figures 11ndash13 the quasiperiodic trajectoryis restricted to an annular-like region of the state spaceand differs considerably from periodic trajectories When
6 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
Ω (rads)40353025201510
Region C(periodic motion)
(a)
Velo
city
(ms
)
4
2
0
Ω (rads)82582815818058795
Region B(quasiperiodic motion)
Region A(chaotic motion)
Region C(periodic motion)
(quasiperiodic motion) Region C(periodic mo
(b)
Figure 8 Bifurcation diagram for the system when the amplitude of the road excitation 119886 is 005m (a) Ω = 796 rads to 40 rads (b) Ω =796 rads to 825 rads
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
3
28
26
24
22
Phase angle0850807507
(b)
Velo
city
(ms
)
Ω (rads)
3
2
1
020151050
(c)
Figure 9 The period-one orbit at Ω = 82 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
Displacement (m)0080060040020minus002minus004minus006minus008
minus2
minus1
0
1
2
(b)
Figure 10 Phase portrait (a)Ω = 82 rads (b)Ω = 40 rads
Journal of Advanced Transportation 7
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
2
15
1
0
05
20151050
(c)
Figure 11 Quasiperiodic orbit at Ω = 80 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Ω = 80 805 or 815 the system exhibits a quasiperiodicmotion and the map forms a continuous closed orbit in thePoincare section as shown in Figures 11ndash13 As the forcingfrequency (Ω) continues decreasing into regionA (Figure 14)chaotic motion produces chatter vibration The transitionsequence for the system in this paper is from periodic motionto quasiperiodic motion and finally to chaotic motion Theparticular features of these two descriptors characterize thechaotic behavior The Poincare map contains an infinite setof points which are referred to as a strange attractor Thefrequency spectrum of the chaotic motion is a continu-ous broad spectrum The strange attractor and continuousFourier spectrum are strong indicators of chaos Figure 14shows clear indications of chaotic behavior in region AFigures 14(a)ndash14(c) respectively show the phase portraits thePoincare maps and frequency spectra
5 Analysis of Chaotic Phenomena LyapunovExponent and Lyapunov Dimension
The analysis presented in Section 4 is insufficient to confi-dently identify chaotic motion in a suspension system In thissection we adopt Lyapunov exponents to verify the existenceof chaotic motion In every dynamic system the spectrumof Lyapunov exponents (120582) [20] indicates variations in thelengths areas and volumes of the phase space Verifying theexistence of chaos requires calculation of only the largestexponent to indicate whether nearby trajectories diverge
(120582 gt 0) or converge (120582 lt 0) on average Any boundedmotionwithin a system that has at least one positive Lyapunovexponent is defined as chaotic The Lyapunov exponents forperiodic motion are not positive
Figure 15 plots the evolution of the largest Lyapunovexponent in a suspension system This value is computedusing the algorithm presented by Wolf et al [20] Figure 14shows that chaotic motion began at approximately Ω =7965 rads because at point (1198751) the sign of the largestLyapunov exponent changed from negative to positive as theparameterΩ slowly decreased Between points1198751 and1198752 thelargest Lyapunov exponent approached zeroThe existence ofa forcing frequency Ω in these regions denotes the motionin the system as quasiperiodic When the value of Ω isgreater than 1198751 (such as when Ω = 82 rads) the Lyapunovexponents obtained using (3) are 1205821 = minus00010375 and 1205822 =minus00013232The sum of these values is 1205821+1205822 = minus00023607this negative value demonstrates that the motion of massat these values eventually converges to a stable limit cycleUsing the Lyapunov exponents for a dynamical system where1205821 ge sdot sdot sdot ge 120582119899 Kaplan and Yorke [32] provided an estimationof the Lyapunov dimension 119889119871 as follows
119889119871 = 119895 + 110038161003816100381610038161003816120582119895+110038161003816100381610038161003816119895sum119894=1
120582119894 (19)
where 119895 is the largest integer that satisfies sum119895119894=1 120582119894 gt 0This technique yields a Lyapunov dimension of 119889119871 = 1 for
8 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
minus4
minus2
04020minus02minus06 minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
06 07 08 09Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
1
0
05
20151050
(c)
Figure 12 Quasiperiodic orbit at Ω = 805 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
Velo
city
(ms
)
2
25
3
07 075 08Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
25
1
0
05
20151050
(c)
Figure 13 Quasiperiodic orbit at Ω = 815 rads (a) the phase portrait (b) the Poincare map and (c) frequency spectrum
Journal of Advanced Transportation 9
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
5
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
1
0
05
20151050
(c)
Figure 14 Chaotic motion at Ω = 7964 rads (a) the phase portrait (b) Poincare map and (c) the frequency spectrum
8 805 81 815 82 825Ω (rads)
minus003
minus0025
minus002
minus0015
minus001
minus0005
0
0005
001
Larg
est L
yapu
nov
expo
nent
P2 P1
Figure 15 Evolution of the largest Lyapunov exponent
Ω = 82 rads The fact that the Lyapunov dimension is aninteger means that the system has periodic motion Whenparameter Ω increases beyond the bifurcation point (such aswhen Ω = 7964 rads) the Lyapunov exponents are 1205821 =00054396 and 1205822 = minus0092153 and the Lyapunov dimensionis 119889119871 = 1059 In this case the Lyapunov dimension is notan integer indicating that the system exhibits chaotic mo-tion
6 Controlling Chaos
Improving the performance of a dynamic system andoravoiding chaotic behavior require periodic motion whichis more important when working under specific conditionsCai et al [26] suggested a simple effective control methodthat converts chaotic motions into periodic motion usingthe linear state feedback as a system variable This approach
10 Journal of Advanced Transportation
G = minus014
minus045 minus04 minus035 minus03 minus025 minus02 minus015 minus01 minus005 0minus05Feedback gain G
minus05minus04minus03minus02minus01
00102030405
Disp
lace
men
t (m
)
Figure 16The bifurcation diagram for a system with state feedbackcontrol where 119866 denotes the feedback gain
to achieving an n-dimensional dynamic system is explainedbriefly as follows
= 119891 (119909 119905) (20)
where 119909(119905) isin 119877119899 is the state vector and 119891 =(1198911 119891119894 119891119899) where 119891119894 is a linear or a nonlinearfunction and 119891 includes at least one nonlinear function If119891119896(119909 119905) is a nonlinear function that gives chaotic motionin (20) then only one term of the state feedback for theavailable system variable 119909119898 is added to the equation thatincludes 119891119896 as follows
119896 = 119891119896 (119909 119905) + 119866119909119898 119896 119898 isin 1 2 119899 (21)
where119866 is the feedback gain Other functions remain in theiroriginal forms
System (3) with state feedback control can be written asfollows
1198891199101119889119905 = 11991021198891199102119889119905 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023
+ 119886Ω2 sin (Ω119905) + 1198661199102(22)
In the absence of state feedback control G = 0 and (3)describes chaotic motion when Ω = 7964 rads Figure 16shows the resulting bifurcation diagram for a system withstate feedback control This figure clearly shows that chaoticmotion occurs at approximately 119866 gt minus014 and disappearsat approximately 119866 le minus014 When feedback gain 119866 fallsbelow minus014 stable periodic motion occurs As shown inFigure 17 a control signal is applied to the system at 35 s togovern the chaotic oscillation In this manner state feedbackcontrol can be used to suppress chaotic motion and improvethe performance of a vehiclersquos suspension system The form
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
ControlledUncontrolled
Velo
city
(ms
) 5
0
minus5
Time (sec)80706050403020100
(b)
Figure 17 Transforming chaotic motion to a desired period-oneorbit for 119866 = minus03 and Ω = 7964 rads (a) the phase portraitfor the controlled system when the state feedback control signal isintroduced after 35 s and (b) the time responses of the velocity
of the control gain in the original system equation (1) is asfollows
119866 = 119866 sdot 119898 (23)
The physical meaning of gain 119866 is control gain and the unitof the gain is Nsdotskgsdotm
In many general systems that involve chaotic dynamicsthis state feedback technique does not require preliminaryor on-line analysis of the system dynamics and can beimplemented by adding the feedback of a suitable variable tothe original system with sufficient control gain to suppressthe development of chaos In this regard the state feedbackcontrol technique is simple and effective approach to chaossuppression
7 Conclusions
This study examined the nonlinear dynamic behavior ina vehicle suspension system with hysteretic damping Ourobjective was to develop a method to control chaotic vibra-tion Dynamic behavior was observed over the entire rangeof parameter values of the bifurcation sets and bifurca-tion diagram Using bifurcation analysis we identified acodimension-two bifurcation structure with double-zerodegeneracy in the system The bifurcation diagram indicatesthe existence of quasiperiodic orbit and chaotic motionthereby demonstrating the effectiveness of using Lyapunovexponents as a tool for identifying chaoticmotion Finally weproposed a state feedback control method to suppress chaoticmotions and improve the ride provided by an automotivesuspension system Simulation results confirm the feasibilityof the proposed method Our results provide insight intothe operating conditions under which undesirable dynamicmotion takes place in vehicle suspension systems Our results
Journal of Advanced Transportation 11
also provide a useful reference for engineers involved in thedesign of control systems for vehicle suspensions It shouldbe noted that in practical engineering phenomena such asactuator faults time-varying delays unmodeled dynamicsand dynamics disturbances often occur simultaneously andthese problems are beyond the scope of the current study Infuture work we will seek to control nonlinear systems withtime-varying delays
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The authors would like to thank the Ministry of Science andTechnology of the Republic of China Taiwan for financiallysupporting this research under Contract noMOST 105-2221-E-212-016
References
[1] H Chen Z-Y Liu and P-Y Sun ldquoApplication of constrainedscript Hinfin control to active suspension systems on half-carmodelsrdquo Journal of Dynamic Systems Measurement and Con-trol vol 127 no 3 pp 345ndash354 2005
[2] X Song M Ahmadian S Southward and L Miller ldquoParamet-ric study of nonlinear adaptive control algorithmwithmagneto-rheological suspension systemsrdquo Communications in NonlinearScience and Numerical Simulation vol 12 no 4 pp 584ndash6072007
[3] L-M Gui W-K Shi and W Liu ldquoA semi-active suspensiondesign for off-road vehicle base on Magneto-rheological tech-nologyrdquo in Proceedings of the 2012 9th International Conferenceon Fuzzy Systems and Knowledge Discovery FSKD 2012 pp2565ndash2568 China May 2012
[4] F Tu Q Yang C He and L Wang ldquoExperimental Study andDesign on Automobile SuspensionMade of Magneto-Rheolog-ical Damperrdquo in Proceedings of the International Conference onFuture Energy Environment andMaterials FEEM2012 pp 417ndash425 Hong Kong April 2012
[5] P W Nugroho H Du W Li and G Alici ldquoImplementation ofAdaptive Neuro Fuzzy Inference System controller on magnetorheological damper suspensionrdquo in Proceedings of the 2013IEEEASME International Conference on Advanced IntelligentMechatronicsMechatronics forHumanWellbeing AIM2013 pp1399ndash1403 Australia July 2013
[6] Arnold VI Geometric Methods in the Theory of OrdinaryDifferential Equations New York Springer-Verlag 1988
[7] P J Holmes ldquoBifurcations to divergence and flutter in flow-induced oscillations a finite dimensional analysisrdquo Journal ofSound and Vibration vol 53 no 4 pp 471ndash503 1977
[8] J Guckenheimer and P J Holmes Nonlinear OscillationsDynamical System and Bifurcation of Vector Fields Springer-Verlag New York 2013
[9] C-Y Tseng and P-C Tung ldquoDynamics of nonlinear structurewithmagnetic actuatorrdquo Japanese Journal of Applied Physics vol34 no 1 pp 374ndash382 1995
[10] K Yagasaki ldquoCodimension-two bifurcations in a pendulumwith feedback controlrdquo International Journal of Non-LinearMechanics vol 34 no 6 pp 983ndash1002 1999
[11] R Tian Q Cao and S Yang ldquoThe codimension-two bifurcationfor the recent proposed SD oscillatorrdquoNonlinear Dynamics vol59 no 1-2 pp 19ndash27 2010
[12] S Yin P Shi and H Yang ldquoAdaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems With UnmodeledDynamicsrdquo IEEE Transactions on Cybernetics vol 46 no 8 pp1926ndash1938 2016
[13] S Yin H Yang H Gao J Qiu and O Kaynak ldquoAn adaptiveNN-based approach for fault-tolerant control of nonlineartime-varying delay systems with unmodeled dynamicsrdquo IEEETransactions on Neural Networks and Learning Systems vol 28no 8 pp 1902ndash1913 2017
[14] S Li S Yang and W Guo ldquoInvestigation on chaotic motion inhysteretic non-linear suspension system with multi-frequencyexcitationsrdquoMechanics Research Communications vol 31 no 2pp 229ndash236 2004
[15] R D Naik and P M Singru ldquoResonance stability and chaoticvibration of a quarter-car vehicle model with time-delay feed-backrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 8 pp 3397ndash3410 2011
[16] M Borowiec G Litak and M I Friswell ldquoNonlinear responseof an oscillator with a magneto-rheological damper subjectedto external forcingrdquo Applied Mechanics and Materials vol 5-6pp 277ndash284 2006
[17] G Litak M Borowiec M I Friswell and K Szabelski ldquoChaoticvibration of a quarter-car model excited by the road surfaceprofilerdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 7 pp 1373ndash1383 2008
[18] J Marzbanrad and A Keshavarzi ldquoChaotic vibrations of anonlinear air suspension system under consecutive half sinespeed bumprdquo Indian Journal of Science and Technology vol 8pp 72ndash84 2015
[19] J Marzbanrad and A Keshavarzi ldquoA Chaotic viewpoint on aquarter-car air suspension model with numerical and experi-mental analysis[J]rdquo Journal of Cahiers Des Sciences vol 23 2014
[20] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[21] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[22] E R Hunt ldquoStabilizing high-period orbits in a chaotic systemthe diode resonatorrdquo Physical Review Letters vol 67 no 15 pp1953ndash1955 1991
[23] C Cai Z XuW Xu and B Feng ldquoNotch filter feedback controlin a class of chaotic systemsrdquoAutomatica vol 38 no 4 pp 695ndash701 2002
[24] G Litak M Borowiec M Ali L M Saha and M I FriswellldquoPulsive feedback control of a quarter car model forced by aroad profilerdquo Chaos Solitons amp Fractals vol 33 no 5 pp 1672ndash1676 2007
[25] H Du K Y Sze and J Lam ldquoSemi-active 119867infin control ofvehicle suspensionwithmagneto-rheological dampersrdquo Journalof Sound and Vibration vol 283 no 3ndash5 pp 981ndash996 2005
[26] C Cai Z Xu and W Xu ldquoConverting chaos into periodicmotion by state feedback controlrdquo Automatica vol 38 no 11pp 1927ndash1933 2002
[27] M Ashkenazi and S-N Chow ldquoNormal forms near criticalpoints for differential equations and mapsrdquo IEEE Transactions
12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

6 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
Ω (rads)40353025201510
Region C(periodic motion)
(a)
Velo
city
(ms
)
4
2
0
Ω (rads)82582815818058795
Region B(quasiperiodic motion)
Region A(chaotic motion)
Region C(periodic motion)
(quasiperiodic motion) Region C(periodic mo
(b)
Figure 8 Bifurcation diagram for the system when the amplitude of the road excitation 119886 is 005m (a) Ω = 796 rads to 40 rads (b) Ω =796 rads to 825 rads
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
3
28
26
24
22
Phase angle0850807507
(b)
Velo
city
(ms
)
Ω (rads)
3
2
1
020151050
(c)
Figure 9 The period-one orbit at Ω = 82 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus2
minus4040302010minus01minus02minus03minus04
Displacement (m)
(a)
Velo
city
(ms
)
Displacement (m)0080060040020minus002minus004minus006minus008
minus2
minus1
0
1
2
(b)
Figure 10 Phase portrait (a)Ω = 82 rads (b)Ω = 40 rads
Journal of Advanced Transportation 7
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
2
15
1
0
05
20151050
(c)
Figure 11 Quasiperiodic orbit at Ω = 80 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Ω = 80 805 or 815 the system exhibits a quasiperiodicmotion and the map forms a continuous closed orbit in thePoincare section as shown in Figures 11ndash13 As the forcingfrequency (Ω) continues decreasing into regionA (Figure 14)chaotic motion produces chatter vibration The transitionsequence for the system in this paper is from periodic motionto quasiperiodic motion and finally to chaotic motion Theparticular features of these two descriptors characterize thechaotic behavior The Poincare map contains an infinite setof points which are referred to as a strange attractor Thefrequency spectrum of the chaotic motion is a continu-ous broad spectrum The strange attractor and continuousFourier spectrum are strong indicators of chaos Figure 14shows clear indications of chaotic behavior in region AFigures 14(a)ndash14(c) respectively show the phase portraits thePoincare maps and frequency spectra
5 Analysis of Chaotic Phenomena LyapunovExponent and Lyapunov Dimension
The analysis presented in Section 4 is insufficient to confi-dently identify chaotic motion in a suspension system In thissection we adopt Lyapunov exponents to verify the existenceof chaotic motion In every dynamic system the spectrumof Lyapunov exponents (120582) [20] indicates variations in thelengths areas and volumes of the phase space Verifying theexistence of chaos requires calculation of only the largestexponent to indicate whether nearby trajectories diverge
(120582 gt 0) or converge (120582 lt 0) on average Any boundedmotionwithin a system that has at least one positive Lyapunovexponent is defined as chaotic The Lyapunov exponents forperiodic motion are not positive
Figure 15 plots the evolution of the largest Lyapunovexponent in a suspension system This value is computedusing the algorithm presented by Wolf et al [20] Figure 14shows that chaotic motion began at approximately Ω =7965 rads because at point (1198751) the sign of the largestLyapunov exponent changed from negative to positive as theparameterΩ slowly decreased Between points1198751 and1198752 thelargest Lyapunov exponent approached zeroThe existence ofa forcing frequency Ω in these regions denotes the motionin the system as quasiperiodic When the value of Ω isgreater than 1198751 (such as when Ω = 82 rads) the Lyapunovexponents obtained using (3) are 1205821 = minus00010375 and 1205822 =minus00013232The sum of these values is 1205821+1205822 = minus00023607this negative value demonstrates that the motion of massat these values eventually converges to a stable limit cycleUsing the Lyapunov exponents for a dynamical system where1205821 ge sdot sdot sdot ge 120582119899 Kaplan and Yorke [32] provided an estimationof the Lyapunov dimension 119889119871 as follows
119889119871 = 119895 + 110038161003816100381610038161003816120582119895+110038161003816100381610038161003816119895sum119894=1
120582119894 (19)
where 119895 is the largest integer that satisfies sum119895119894=1 120582119894 gt 0This technique yields a Lyapunov dimension of 119889119871 = 1 for
8 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
minus4
minus2
04020minus02minus06 minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
06 07 08 09Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
1
0
05
20151050
(c)
Figure 12 Quasiperiodic orbit at Ω = 805 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
Velo
city
(ms
)
2
25
3
07 075 08Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
25
1
0
05
20151050
(c)
Figure 13 Quasiperiodic orbit at Ω = 815 rads (a) the phase portrait (b) the Poincare map and (c) frequency spectrum
Journal of Advanced Transportation 9
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
5
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
1
0
05
20151050
(c)
Figure 14 Chaotic motion at Ω = 7964 rads (a) the phase portrait (b) Poincare map and (c) the frequency spectrum
8 805 81 815 82 825Ω (rads)
minus003
minus0025
minus002
minus0015
minus001
minus0005
0
0005
001
Larg
est L
yapu
nov
expo
nent
P2 P1
Figure 15 Evolution of the largest Lyapunov exponent
Ω = 82 rads The fact that the Lyapunov dimension is aninteger means that the system has periodic motion Whenparameter Ω increases beyond the bifurcation point (such aswhen Ω = 7964 rads) the Lyapunov exponents are 1205821 =00054396 and 1205822 = minus0092153 and the Lyapunov dimensionis 119889119871 = 1059 In this case the Lyapunov dimension is notan integer indicating that the system exhibits chaotic mo-tion
6 Controlling Chaos
Improving the performance of a dynamic system andoravoiding chaotic behavior require periodic motion whichis more important when working under specific conditionsCai et al [26] suggested a simple effective control methodthat converts chaotic motions into periodic motion usingthe linear state feedback as a system variable This approach
10 Journal of Advanced Transportation
G = minus014
minus045 minus04 minus035 minus03 minus025 minus02 minus015 minus01 minus005 0minus05Feedback gain G
minus05minus04minus03minus02minus01
00102030405
Disp
lace
men
t (m
)
Figure 16The bifurcation diagram for a system with state feedbackcontrol where 119866 denotes the feedback gain
to achieving an n-dimensional dynamic system is explainedbriefly as follows
= 119891 (119909 119905) (20)
where 119909(119905) isin 119877119899 is the state vector and 119891 =(1198911 119891119894 119891119899) where 119891119894 is a linear or a nonlinearfunction and 119891 includes at least one nonlinear function If119891119896(119909 119905) is a nonlinear function that gives chaotic motionin (20) then only one term of the state feedback for theavailable system variable 119909119898 is added to the equation thatincludes 119891119896 as follows
119896 = 119891119896 (119909 119905) + 119866119909119898 119896 119898 isin 1 2 119899 (21)
where119866 is the feedback gain Other functions remain in theiroriginal forms
System (3) with state feedback control can be written asfollows
1198891199101119889119905 = 11991021198891199102119889119905 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023
+ 119886Ω2 sin (Ω119905) + 1198661199102(22)
In the absence of state feedback control G = 0 and (3)describes chaotic motion when Ω = 7964 rads Figure 16shows the resulting bifurcation diagram for a system withstate feedback control This figure clearly shows that chaoticmotion occurs at approximately 119866 gt minus014 and disappearsat approximately 119866 le minus014 When feedback gain 119866 fallsbelow minus014 stable periodic motion occurs As shown inFigure 17 a control signal is applied to the system at 35 s togovern the chaotic oscillation In this manner state feedbackcontrol can be used to suppress chaotic motion and improvethe performance of a vehiclersquos suspension system The form
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
ControlledUncontrolled
Velo
city
(ms
) 5
0
minus5
Time (sec)80706050403020100
(b)
Figure 17 Transforming chaotic motion to a desired period-oneorbit for 119866 = minus03 and Ω = 7964 rads (a) the phase portraitfor the controlled system when the state feedback control signal isintroduced after 35 s and (b) the time responses of the velocity
of the control gain in the original system equation (1) is asfollows
119866 = 119866 sdot 119898 (23)
The physical meaning of gain 119866 is control gain and the unitof the gain is Nsdotskgsdotm
In many general systems that involve chaotic dynamicsthis state feedback technique does not require preliminaryor on-line analysis of the system dynamics and can beimplemented by adding the feedback of a suitable variable tothe original system with sufficient control gain to suppressthe development of chaos In this regard the state feedbackcontrol technique is simple and effective approach to chaossuppression
7 Conclusions
This study examined the nonlinear dynamic behavior ina vehicle suspension system with hysteretic damping Ourobjective was to develop a method to control chaotic vibra-tion Dynamic behavior was observed over the entire rangeof parameter values of the bifurcation sets and bifurca-tion diagram Using bifurcation analysis we identified acodimension-two bifurcation structure with double-zerodegeneracy in the system The bifurcation diagram indicatesthe existence of quasiperiodic orbit and chaotic motionthereby demonstrating the effectiveness of using Lyapunovexponents as a tool for identifying chaoticmotion Finally weproposed a state feedback control method to suppress chaoticmotions and improve the ride provided by an automotivesuspension system Simulation results confirm the feasibilityof the proposed method Our results provide insight intothe operating conditions under which undesirable dynamicmotion takes place in vehicle suspension systems Our results
Journal of Advanced Transportation 11
also provide a useful reference for engineers involved in thedesign of control systems for vehicle suspensions It shouldbe noted that in practical engineering phenomena such asactuator faults time-varying delays unmodeled dynamicsand dynamics disturbances often occur simultaneously andthese problems are beyond the scope of the current study Infuture work we will seek to control nonlinear systems withtime-varying delays
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The authors would like to thank the Ministry of Science andTechnology of the Republic of China Taiwan for financiallysupporting this research under Contract noMOST 105-2221-E-212-016
References
[1] H Chen Z-Y Liu and P-Y Sun ldquoApplication of constrainedscript Hinfin control to active suspension systems on half-carmodelsrdquo Journal of Dynamic Systems Measurement and Con-trol vol 127 no 3 pp 345ndash354 2005
[2] X Song M Ahmadian S Southward and L Miller ldquoParamet-ric study of nonlinear adaptive control algorithmwithmagneto-rheological suspension systemsrdquo Communications in NonlinearScience and Numerical Simulation vol 12 no 4 pp 584ndash6072007
[3] L-M Gui W-K Shi and W Liu ldquoA semi-active suspensiondesign for off-road vehicle base on Magneto-rheological tech-nologyrdquo in Proceedings of the 2012 9th International Conferenceon Fuzzy Systems and Knowledge Discovery FSKD 2012 pp2565ndash2568 China May 2012
[4] F Tu Q Yang C He and L Wang ldquoExperimental Study andDesign on Automobile SuspensionMade of Magneto-Rheolog-ical Damperrdquo in Proceedings of the International Conference onFuture Energy Environment andMaterials FEEM2012 pp 417ndash425 Hong Kong April 2012
[5] P W Nugroho H Du W Li and G Alici ldquoImplementation ofAdaptive Neuro Fuzzy Inference System controller on magnetorheological damper suspensionrdquo in Proceedings of the 2013IEEEASME International Conference on Advanced IntelligentMechatronicsMechatronics forHumanWellbeing AIM2013 pp1399ndash1403 Australia July 2013
[6] Arnold VI Geometric Methods in the Theory of OrdinaryDifferential Equations New York Springer-Verlag 1988
[7] P J Holmes ldquoBifurcations to divergence and flutter in flow-induced oscillations a finite dimensional analysisrdquo Journal ofSound and Vibration vol 53 no 4 pp 471ndash503 1977
[8] J Guckenheimer and P J Holmes Nonlinear OscillationsDynamical System and Bifurcation of Vector Fields Springer-Verlag New York 2013
[9] C-Y Tseng and P-C Tung ldquoDynamics of nonlinear structurewithmagnetic actuatorrdquo Japanese Journal of Applied Physics vol34 no 1 pp 374ndash382 1995
[10] K Yagasaki ldquoCodimension-two bifurcations in a pendulumwith feedback controlrdquo International Journal of Non-LinearMechanics vol 34 no 6 pp 983ndash1002 1999
[11] R Tian Q Cao and S Yang ldquoThe codimension-two bifurcationfor the recent proposed SD oscillatorrdquoNonlinear Dynamics vol59 no 1-2 pp 19ndash27 2010
[12] S Yin P Shi and H Yang ldquoAdaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems With UnmodeledDynamicsrdquo IEEE Transactions on Cybernetics vol 46 no 8 pp1926ndash1938 2016
[13] S Yin H Yang H Gao J Qiu and O Kaynak ldquoAn adaptiveNN-based approach for fault-tolerant control of nonlineartime-varying delay systems with unmodeled dynamicsrdquo IEEETransactions on Neural Networks and Learning Systems vol 28no 8 pp 1902ndash1913 2017
[14] S Li S Yang and W Guo ldquoInvestigation on chaotic motion inhysteretic non-linear suspension system with multi-frequencyexcitationsrdquoMechanics Research Communications vol 31 no 2pp 229ndash236 2004
[15] R D Naik and P M Singru ldquoResonance stability and chaoticvibration of a quarter-car vehicle model with time-delay feed-backrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 8 pp 3397ndash3410 2011
[16] M Borowiec G Litak and M I Friswell ldquoNonlinear responseof an oscillator with a magneto-rheological damper subjectedto external forcingrdquo Applied Mechanics and Materials vol 5-6pp 277ndash284 2006
[17] G Litak M Borowiec M I Friswell and K Szabelski ldquoChaoticvibration of a quarter-car model excited by the road surfaceprofilerdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 7 pp 1373ndash1383 2008
[18] J Marzbanrad and A Keshavarzi ldquoChaotic vibrations of anonlinear air suspension system under consecutive half sinespeed bumprdquo Indian Journal of Science and Technology vol 8pp 72ndash84 2015
[19] J Marzbanrad and A Keshavarzi ldquoA Chaotic viewpoint on aquarter-car air suspension model with numerical and experi-mental analysis[J]rdquo Journal of Cahiers Des Sciences vol 23 2014
[20] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[21] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[22] E R Hunt ldquoStabilizing high-period orbits in a chaotic systemthe diode resonatorrdquo Physical Review Letters vol 67 no 15 pp1953ndash1955 1991
[23] C Cai Z XuW Xu and B Feng ldquoNotch filter feedback controlin a class of chaotic systemsrdquoAutomatica vol 38 no 4 pp 695ndash701 2002
[24] G Litak M Borowiec M Ali L M Saha and M I FriswellldquoPulsive feedback control of a quarter car model forced by aroad profilerdquo Chaos Solitons amp Fractals vol 33 no 5 pp 1672ndash1676 2007
[25] H Du K Y Sze and J Lam ldquoSemi-active 119867infin control ofvehicle suspensionwithmagneto-rheological dampersrdquo Journalof Sound and Vibration vol 283 no 3ndash5 pp 981ndash996 2005
[26] C Cai Z Xu and W Xu ldquoConverting chaos into periodicmotion by state feedback controlrdquo Automatica vol 38 no 11pp 1927ndash1933 2002
[27] M Ashkenazi and S-N Chow ldquoNormal forms near criticalpoints for differential equations and mapsrdquo IEEE Transactions
12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 7
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
2
15
1
0
05
20151050
(c)
Figure 11 Quasiperiodic orbit at Ω = 80 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Ω = 80 805 or 815 the system exhibits a quasiperiodicmotion and the map forms a continuous closed orbit in thePoincare section as shown in Figures 11ndash13 As the forcingfrequency (Ω) continues decreasing into regionA (Figure 14)chaotic motion produces chatter vibration The transitionsequence for the system in this paper is from periodic motionto quasiperiodic motion and finally to chaotic motion Theparticular features of these two descriptors characterize thechaotic behavior The Poincare map contains an infinite setof points which are referred to as a strange attractor Thefrequency spectrum of the chaotic motion is a continu-ous broad spectrum The strange attractor and continuousFourier spectrum are strong indicators of chaos Figure 14shows clear indications of chaotic behavior in region AFigures 14(a)ndash14(c) respectively show the phase portraits thePoincare maps and frequency spectra
5 Analysis of Chaotic Phenomena LyapunovExponent and Lyapunov Dimension
The analysis presented in Section 4 is insufficient to confi-dently identify chaotic motion in a suspension system In thissection we adopt Lyapunov exponents to verify the existenceof chaotic motion In every dynamic system the spectrumof Lyapunov exponents (120582) [20] indicates variations in thelengths areas and volumes of the phase space Verifying theexistence of chaos requires calculation of only the largestexponent to indicate whether nearby trajectories diverge
(120582 gt 0) or converge (120582 lt 0) on average Any boundedmotionwithin a system that has at least one positive Lyapunovexponent is defined as chaotic The Lyapunov exponents forperiodic motion are not positive
Figure 15 plots the evolution of the largest Lyapunovexponent in a suspension system This value is computedusing the algorithm presented by Wolf et al [20] Figure 14shows that chaotic motion began at approximately Ω =7965 rads because at point (1198751) the sign of the largestLyapunov exponent changed from negative to positive as theparameterΩ slowly decreased Between points1198751 and1198752 thelargest Lyapunov exponent approached zeroThe existence ofa forcing frequency Ω in these regions denotes the motionin the system as quasiperiodic When the value of Ω isgreater than 1198751 (such as when Ω = 82 rads) the Lyapunovexponents obtained using (3) are 1205821 = minus00010375 and 1205822 =minus00013232The sum of these values is 1205821+1205822 = minus00023607this negative value demonstrates that the motion of massat these values eventually converges to a stable limit cycleUsing the Lyapunov exponents for a dynamical system where1205821 ge sdot sdot sdot ge 120582119899 Kaplan and Yorke [32] provided an estimationof the Lyapunov dimension 119889119871 as follows
119889119871 = 119895 + 110038161003816100381610038161003816120582119895+110038161003816100381610038161003816119895sum119894=1
120582119894 (19)
where 119895 is the largest integer that satisfies sum119895119894=1 120582119894 gt 0This technique yields a Lyapunov dimension of 119889119871 = 1 for
8 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
minus4
minus2
04020minus02minus06 minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
06 07 08 09Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
1
0
05
20151050
(c)
Figure 12 Quasiperiodic orbit at Ω = 805 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
Velo
city
(ms
)
2
25
3
07 075 08Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
25
1
0
05
20151050
(c)
Figure 13 Quasiperiodic orbit at Ω = 815 rads (a) the phase portrait (b) the Poincare map and (c) frequency spectrum
Journal of Advanced Transportation 9
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
5
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
1
0
05
20151050
(c)
Figure 14 Chaotic motion at Ω = 7964 rads (a) the phase portrait (b) Poincare map and (c) the frequency spectrum
8 805 81 815 82 825Ω (rads)
minus003
minus0025
minus002
minus0015
minus001
minus0005
0
0005
001
Larg
est L
yapu
nov
expo
nent
P2 P1
Figure 15 Evolution of the largest Lyapunov exponent
Ω = 82 rads The fact that the Lyapunov dimension is aninteger means that the system has periodic motion Whenparameter Ω increases beyond the bifurcation point (such aswhen Ω = 7964 rads) the Lyapunov exponents are 1205821 =00054396 and 1205822 = minus0092153 and the Lyapunov dimensionis 119889119871 = 1059 In this case the Lyapunov dimension is notan integer indicating that the system exhibits chaotic mo-tion
6 Controlling Chaos
Improving the performance of a dynamic system andoravoiding chaotic behavior require periodic motion whichis more important when working under specific conditionsCai et al [26] suggested a simple effective control methodthat converts chaotic motions into periodic motion usingthe linear state feedback as a system variable This approach
10 Journal of Advanced Transportation
G = minus014
minus045 minus04 minus035 minus03 minus025 minus02 minus015 minus01 minus005 0minus05Feedback gain G
minus05minus04minus03minus02minus01
00102030405
Disp
lace
men
t (m
)
Figure 16The bifurcation diagram for a system with state feedbackcontrol where 119866 denotes the feedback gain
to achieving an n-dimensional dynamic system is explainedbriefly as follows
= 119891 (119909 119905) (20)
where 119909(119905) isin 119877119899 is the state vector and 119891 =(1198911 119891119894 119891119899) where 119891119894 is a linear or a nonlinearfunction and 119891 includes at least one nonlinear function If119891119896(119909 119905) is a nonlinear function that gives chaotic motionin (20) then only one term of the state feedback for theavailable system variable 119909119898 is added to the equation thatincludes 119891119896 as follows
119896 = 119891119896 (119909 119905) + 119866119909119898 119896 119898 isin 1 2 119899 (21)
where119866 is the feedback gain Other functions remain in theiroriginal forms
System (3) with state feedback control can be written asfollows
1198891199101119889119905 = 11991021198891199102119889119905 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023
+ 119886Ω2 sin (Ω119905) + 1198661199102(22)
In the absence of state feedback control G = 0 and (3)describes chaotic motion when Ω = 7964 rads Figure 16shows the resulting bifurcation diagram for a system withstate feedback control This figure clearly shows that chaoticmotion occurs at approximately 119866 gt minus014 and disappearsat approximately 119866 le minus014 When feedback gain 119866 fallsbelow minus014 stable periodic motion occurs As shown inFigure 17 a control signal is applied to the system at 35 s togovern the chaotic oscillation In this manner state feedbackcontrol can be used to suppress chaotic motion and improvethe performance of a vehiclersquos suspension system The form
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
ControlledUncontrolled
Velo
city
(ms
) 5
0
minus5
Time (sec)80706050403020100
(b)
Figure 17 Transforming chaotic motion to a desired period-oneorbit for 119866 = minus03 and Ω = 7964 rads (a) the phase portraitfor the controlled system when the state feedback control signal isintroduced after 35 s and (b) the time responses of the velocity
of the control gain in the original system equation (1) is asfollows
119866 = 119866 sdot 119898 (23)
The physical meaning of gain 119866 is control gain and the unitof the gain is Nsdotskgsdotm
In many general systems that involve chaotic dynamicsthis state feedback technique does not require preliminaryor on-line analysis of the system dynamics and can beimplemented by adding the feedback of a suitable variable tothe original system with sufficient control gain to suppressthe development of chaos In this regard the state feedbackcontrol technique is simple and effective approach to chaossuppression
7 Conclusions
This study examined the nonlinear dynamic behavior ina vehicle suspension system with hysteretic damping Ourobjective was to develop a method to control chaotic vibra-tion Dynamic behavior was observed over the entire rangeof parameter values of the bifurcation sets and bifurca-tion diagram Using bifurcation analysis we identified acodimension-two bifurcation structure with double-zerodegeneracy in the system The bifurcation diagram indicatesthe existence of quasiperiodic orbit and chaotic motionthereby demonstrating the effectiveness of using Lyapunovexponents as a tool for identifying chaoticmotion Finally weproposed a state feedback control method to suppress chaoticmotions and improve the ride provided by an automotivesuspension system Simulation results confirm the feasibilityof the proposed method Our results provide insight intothe operating conditions under which undesirable dynamicmotion takes place in vehicle suspension systems Our results
Journal of Advanced Transportation 11
also provide a useful reference for engineers involved in thedesign of control systems for vehicle suspensions It shouldbe noted that in practical engineering phenomena such asactuator faults time-varying delays unmodeled dynamicsand dynamics disturbances often occur simultaneously andthese problems are beyond the scope of the current study Infuture work we will seek to control nonlinear systems withtime-varying delays
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The authors would like to thank the Ministry of Science andTechnology of the Republic of China Taiwan for financiallysupporting this research under Contract noMOST 105-2221-E-212-016
References
[1] H Chen Z-Y Liu and P-Y Sun ldquoApplication of constrainedscript Hinfin control to active suspension systems on half-carmodelsrdquo Journal of Dynamic Systems Measurement and Con-trol vol 127 no 3 pp 345ndash354 2005
[2] X Song M Ahmadian S Southward and L Miller ldquoParamet-ric study of nonlinear adaptive control algorithmwithmagneto-rheological suspension systemsrdquo Communications in NonlinearScience and Numerical Simulation vol 12 no 4 pp 584ndash6072007
[3] L-M Gui W-K Shi and W Liu ldquoA semi-active suspensiondesign for off-road vehicle base on Magneto-rheological tech-nologyrdquo in Proceedings of the 2012 9th International Conferenceon Fuzzy Systems and Knowledge Discovery FSKD 2012 pp2565ndash2568 China May 2012
[4] F Tu Q Yang C He and L Wang ldquoExperimental Study andDesign on Automobile SuspensionMade of Magneto-Rheolog-ical Damperrdquo in Proceedings of the International Conference onFuture Energy Environment andMaterials FEEM2012 pp 417ndash425 Hong Kong April 2012
[5] P W Nugroho H Du W Li and G Alici ldquoImplementation ofAdaptive Neuro Fuzzy Inference System controller on magnetorheological damper suspensionrdquo in Proceedings of the 2013IEEEASME International Conference on Advanced IntelligentMechatronicsMechatronics forHumanWellbeing AIM2013 pp1399ndash1403 Australia July 2013
[6] Arnold VI Geometric Methods in the Theory of OrdinaryDifferential Equations New York Springer-Verlag 1988
[7] P J Holmes ldquoBifurcations to divergence and flutter in flow-induced oscillations a finite dimensional analysisrdquo Journal ofSound and Vibration vol 53 no 4 pp 471ndash503 1977
[8] J Guckenheimer and P J Holmes Nonlinear OscillationsDynamical System and Bifurcation of Vector Fields Springer-Verlag New York 2013
[9] C-Y Tseng and P-C Tung ldquoDynamics of nonlinear structurewithmagnetic actuatorrdquo Japanese Journal of Applied Physics vol34 no 1 pp 374ndash382 1995
[10] K Yagasaki ldquoCodimension-two bifurcations in a pendulumwith feedback controlrdquo International Journal of Non-LinearMechanics vol 34 no 6 pp 983ndash1002 1999
[11] R Tian Q Cao and S Yang ldquoThe codimension-two bifurcationfor the recent proposed SD oscillatorrdquoNonlinear Dynamics vol59 no 1-2 pp 19ndash27 2010
[12] S Yin P Shi and H Yang ldquoAdaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems With UnmodeledDynamicsrdquo IEEE Transactions on Cybernetics vol 46 no 8 pp1926ndash1938 2016
[13] S Yin H Yang H Gao J Qiu and O Kaynak ldquoAn adaptiveNN-based approach for fault-tolerant control of nonlineartime-varying delay systems with unmodeled dynamicsrdquo IEEETransactions on Neural Networks and Learning Systems vol 28no 8 pp 1902ndash1913 2017
[14] S Li S Yang and W Guo ldquoInvestigation on chaotic motion inhysteretic non-linear suspension system with multi-frequencyexcitationsrdquoMechanics Research Communications vol 31 no 2pp 229ndash236 2004
[15] R D Naik and P M Singru ldquoResonance stability and chaoticvibration of a quarter-car vehicle model with time-delay feed-backrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 8 pp 3397ndash3410 2011
[16] M Borowiec G Litak and M I Friswell ldquoNonlinear responseof an oscillator with a magneto-rheological damper subjectedto external forcingrdquo Applied Mechanics and Materials vol 5-6pp 277ndash284 2006
[17] G Litak M Borowiec M I Friswell and K Szabelski ldquoChaoticvibration of a quarter-car model excited by the road surfaceprofilerdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 7 pp 1373ndash1383 2008
[18] J Marzbanrad and A Keshavarzi ldquoChaotic vibrations of anonlinear air suspension system under consecutive half sinespeed bumprdquo Indian Journal of Science and Technology vol 8pp 72ndash84 2015
[19] J Marzbanrad and A Keshavarzi ldquoA Chaotic viewpoint on aquarter-car air suspension model with numerical and experi-mental analysis[J]rdquo Journal of Cahiers Des Sciences vol 23 2014
[20] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[21] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[22] E R Hunt ldquoStabilizing high-period orbits in a chaotic systemthe diode resonatorrdquo Physical Review Letters vol 67 no 15 pp1953ndash1955 1991
[23] C Cai Z XuW Xu and B Feng ldquoNotch filter feedback controlin a class of chaotic systemsrdquoAutomatica vol 38 no 4 pp 695ndash701 2002
[24] G Litak M Borowiec M Ali L M Saha and M I FriswellldquoPulsive feedback control of a quarter car model forced by aroad profilerdquo Chaos Solitons amp Fractals vol 33 no 5 pp 1672ndash1676 2007
[25] H Du K Y Sze and J Lam ldquoSemi-active 119867infin control ofvehicle suspensionwithmagneto-rheological dampersrdquo Journalof Sound and Vibration vol 283 no 3ndash5 pp 981ndash996 2005
[26] C Cai Z Xu and W Xu ldquoConverting chaos into periodicmotion by state feedback controlrdquo Automatica vol 38 no 11pp 1927ndash1933 2002
[27] M Ashkenazi and S-N Chow ldquoNormal forms near criticalpoints for differential equations and mapsrdquo IEEE Transactions
12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

8 Journal of Advanced Transportation
Velo
city
(ms
)
4
2
0
minus4
minus2
04020minus02minus06 minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
06 07 08 09Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
1
0
05
20151050
(c)
Figure 12 Quasiperiodic orbit at Ω = 805 rads (a) the phase portrait (b) the Poincare map and (c) the frequency spectrum
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
Velo
city
(ms
)
2
25
3
07 075 08Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
25
1
0
05
20151050
(c)
Figure 13 Quasiperiodic orbit at Ω = 815 rads (a) the phase portrait (b) the Poincare map and (c) frequency spectrum
Journal of Advanced Transportation 9
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
5
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
1
0
05
20151050
(c)
Figure 14 Chaotic motion at Ω = 7964 rads (a) the phase portrait (b) Poincare map and (c) the frequency spectrum
8 805 81 815 82 825Ω (rads)
minus003
minus0025
minus002
minus0015
minus001
minus0005
0
0005
001
Larg
est L
yapu
nov
expo
nent
P2 P1
Figure 15 Evolution of the largest Lyapunov exponent
Ω = 82 rads The fact that the Lyapunov dimension is aninteger means that the system has periodic motion Whenparameter Ω increases beyond the bifurcation point (such aswhen Ω = 7964 rads) the Lyapunov exponents are 1205821 =00054396 and 1205822 = minus0092153 and the Lyapunov dimensionis 119889119871 = 1059 In this case the Lyapunov dimension is notan integer indicating that the system exhibits chaotic mo-tion
6 Controlling Chaos
Improving the performance of a dynamic system andoravoiding chaotic behavior require periodic motion whichis more important when working under specific conditionsCai et al [26] suggested a simple effective control methodthat converts chaotic motions into periodic motion usingthe linear state feedback as a system variable This approach
10 Journal of Advanced Transportation
G = minus014
minus045 minus04 minus035 minus03 minus025 minus02 minus015 minus01 minus005 0minus05Feedback gain G
minus05minus04minus03minus02minus01
00102030405
Disp
lace
men
t (m
)
Figure 16The bifurcation diagram for a system with state feedbackcontrol where 119866 denotes the feedback gain
to achieving an n-dimensional dynamic system is explainedbriefly as follows
= 119891 (119909 119905) (20)
where 119909(119905) isin 119877119899 is the state vector and 119891 =(1198911 119891119894 119891119899) where 119891119894 is a linear or a nonlinearfunction and 119891 includes at least one nonlinear function If119891119896(119909 119905) is a nonlinear function that gives chaotic motionin (20) then only one term of the state feedback for theavailable system variable 119909119898 is added to the equation thatincludes 119891119896 as follows
119896 = 119891119896 (119909 119905) + 119866119909119898 119896 119898 isin 1 2 119899 (21)
where119866 is the feedback gain Other functions remain in theiroriginal forms
System (3) with state feedback control can be written asfollows
1198891199101119889119905 = 11991021198891199102119889119905 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023
+ 119886Ω2 sin (Ω119905) + 1198661199102(22)
In the absence of state feedback control G = 0 and (3)describes chaotic motion when Ω = 7964 rads Figure 16shows the resulting bifurcation diagram for a system withstate feedback control This figure clearly shows that chaoticmotion occurs at approximately 119866 gt minus014 and disappearsat approximately 119866 le minus014 When feedback gain 119866 fallsbelow minus014 stable periodic motion occurs As shown inFigure 17 a control signal is applied to the system at 35 s togovern the chaotic oscillation In this manner state feedbackcontrol can be used to suppress chaotic motion and improvethe performance of a vehiclersquos suspension system The form
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
ControlledUncontrolled
Velo
city
(ms
) 5
0
minus5
Time (sec)80706050403020100
(b)
Figure 17 Transforming chaotic motion to a desired period-oneorbit for 119866 = minus03 and Ω = 7964 rads (a) the phase portraitfor the controlled system when the state feedback control signal isintroduced after 35 s and (b) the time responses of the velocity
of the control gain in the original system equation (1) is asfollows
119866 = 119866 sdot 119898 (23)
The physical meaning of gain 119866 is control gain and the unitof the gain is Nsdotskgsdotm
In many general systems that involve chaotic dynamicsthis state feedback technique does not require preliminaryor on-line analysis of the system dynamics and can beimplemented by adding the feedback of a suitable variable tothe original system with sufficient control gain to suppressthe development of chaos In this regard the state feedbackcontrol technique is simple and effective approach to chaossuppression
7 Conclusions
This study examined the nonlinear dynamic behavior ina vehicle suspension system with hysteretic damping Ourobjective was to develop a method to control chaotic vibra-tion Dynamic behavior was observed over the entire rangeof parameter values of the bifurcation sets and bifurca-tion diagram Using bifurcation analysis we identified acodimension-two bifurcation structure with double-zerodegeneracy in the system The bifurcation diagram indicatesthe existence of quasiperiodic orbit and chaotic motionthereby demonstrating the effectiveness of using Lyapunovexponents as a tool for identifying chaoticmotion Finally weproposed a state feedback control method to suppress chaoticmotions and improve the ride provided by an automotivesuspension system Simulation results confirm the feasibilityof the proposed method Our results provide insight intothe operating conditions under which undesirable dynamicmotion takes place in vehicle suspension systems Our results
Journal of Advanced Transportation 11
also provide a useful reference for engineers involved in thedesign of control systems for vehicle suspensions It shouldbe noted that in practical engineering phenomena such asactuator faults time-varying delays unmodeled dynamicsand dynamics disturbances often occur simultaneously andthese problems are beyond the scope of the current study Infuture work we will seek to control nonlinear systems withtime-varying delays
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The authors would like to thank the Ministry of Science andTechnology of the Republic of China Taiwan for financiallysupporting this research under Contract noMOST 105-2221-E-212-016
References
[1] H Chen Z-Y Liu and P-Y Sun ldquoApplication of constrainedscript Hinfin control to active suspension systems on half-carmodelsrdquo Journal of Dynamic Systems Measurement and Con-trol vol 127 no 3 pp 345ndash354 2005
[2] X Song M Ahmadian S Southward and L Miller ldquoParamet-ric study of nonlinear adaptive control algorithmwithmagneto-rheological suspension systemsrdquo Communications in NonlinearScience and Numerical Simulation vol 12 no 4 pp 584ndash6072007
[3] L-M Gui W-K Shi and W Liu ldquoA semi-active suspensiondesign for off-road vehicle base on Magneto-rheological tech-nologyrdquo in Proceedings of the 2012 9th International Conferenceon Fuzzy Systems and Knowledge Discovery FSKD 2012 pp2565ndash2568 China May 2012
[4] F Tu Q Yang C He and L Wang ldquoExperimental Study andDesign on Automobile SuspensionMade of Magneto-Rheolog-ical Damperrdquo in Proceedings of the International Conference onFuture Energy Environment andMaterials FEEM2012 pp 417ndash425 Hong Kong April 2012
[5] P W Nugroho H Du W Li and G Alici ldquoImplementation ofAdaptive Neuro Fuzzy Inference System controller on magnetorheological damper suspensionrdquo in Proceedings of the 2013IEEEASME International Conference on Advanced IntelligentMechatronicsMechatronics forHumanWellbeing AIM2013 pp1399ndash1403 Australia July 2013
[6] Arnold VI Geometric Methods in the Theory of OrdinaryDifferential Equations New York Springer-Verlag 1988
[7] P J Holmes ldquoBifurcations to divergence and flutter in flow-induced oscillations a finite dimensional analysisrdquo Journal ofSound and Vibration vol 53 no 4 pp 471ndash503 1977
[8] J Guckenheimer and P J Holmes Nonlinear OscillationsDynamical System and Bifurcation of Vector Fields Springer-Verlag New York 2013
[9] C-Y Tseng and P-C Tung ldquoDynamics of nonlinear structurewithmagnetic actuatorrdquo Japanese Journal of Applied Physics vol34 no 1 pp 374ndash382 1995
[10] K Yagasaki ldquoCodimension-two bifurcations in a pendulumwith feedback controlrdquo International Journal of Non-LinearMechanics vol 34 no 6 pp 983ndash1002 1999
[11] R Tian Q Cao and S Yang ldquoThe codimension-two bifurcationfor the recent proposed SD oscillatorrdquoNonlinear Dynamics vol59 no 1-2 pp 19ndash27 2010
[12] S Yin P Shi and H Yang ldquoAdaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems With UnmodeledDynamicsrdquo IEEE Transactions on Cybernetics vol 46 no 8 pp1926ndash1938 2016
[13] S Yin H Yang H Gao J Qiu and O Kaynak ldquoAn adaptiveNN-based approach for fault-tolerant control of nonlineartime-varying delay systems with unmodeled dynamicsrdquo IEEETransactions on Neural Networks and Learning Systems vol 28no 8 pp 1902ndash1913 2017
[14] S Li S Yang and W Guo ldquoInvestigation on chaotic motion inhysteretic non-linear suspension system with multi-frequencyexcitationsrdquoMechanics Research Communications vol 31 no 2pp 229ndash236 2004
[15] R D Naik and P M Singru ldquoResonance stability and chaoticvibration of a quarter-car vehicle model with time-delay feed-backrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 8 pp 3397ndash3410 2011
[16] M Borowiec G Litak and M I Friswell ldquoNonlinear responseof an oscillator with a magneto-rheological damper subjectedto external forcingrdquo Applied Mechanics and Materials vol 5-6pp 277ndash284 2006
[17] G Litak M Borowiec M I Friswell and K Szabelski ldquoChaoticvibration of a quarter-car model excited by the road surfaceprofilerdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 7 pp 1373ndash1383 2008
[18] J Marzbanrad and A Keshavarzi ldquoChaotic vibrations of anonlinear air suspension system under consecutive half sinespeed bumprdquo Indian Journal of Science and Technology vol 8pp 72ndash84 2015
[19] J Marzbanrad and A Keshavarzi ldquoA Chaotic viewpoint on aquarter-car air suspension model with numerical and experi-mental analysis[J]rdquo Journal of Cahiers Des Sciences vol 23 2014
[20] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[21] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[22] E R Hunt ldquoStabilizing high-period orbits in a chaotic systemthe diode resonatorrdquo Physical Review Letters vol 67 no 15 pp1953ndash1955 1991
[23] C Cai Z XuW Xu and B Feng ldquoNotch filter feedback controlin a class of chaotic systemsrdquoAutomatica vol 38 no 4 pp 695ndash701 2002
[24] G Litak M Borowiec M Ali L M Saha and M I FriswellldquoPulsive feedback control of a quarter car model forced by aroad profilerdquo Chaos Solitons amp Fractals vol 33 no 5 pp 1672ndash1676 2007
[25] H Du K Y Sze and J Lam ldquoSemi-active 119867infin control ofvehicle suspensionwithmagneto-rheological dampersrdquo Journalof Sound and Vibration vol 283 no 3ndash5 pp 981ndash996 2005
[26] C Cai Z Xu and W Xu ldquoConverting chaos into periodicmotion by state feedback controlrdquo Automatica vol 38 no 11pp 1927ndash1933 2002
[27] M Ashkenazi and S-N Chow ldquoNormal forms near criticalpoints for differential equations and mapsrdquo IEEE Transactions
12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 9
Velo
city
(ms
)
5
0
minus504020minus02minus06 06minus04
Displacement (m)
(a)
Velo
city
(ms
)
0
1
2
3
4
5
08 09 1Phase angle
(b)
Velo
city
(ms
)
Ω (rads)
15
2
1
0
05
20151050
(c)
Figure 14 Chaotic motion at Ω = 7964 rads (a) the phase portrait (b) Poincare map and (c) the frequency spectrum
8 805 81 815 82 825Ω (rads)
minus003
minus0025
minus002
minus0015
minus001
minus0005
0
0005
001
Larg
est L
yapu
nov
expo
nent
P2 P1
Figure 15 Evolution of the largest Lyapunov exponent
Ω = 82 rads The fact that the Lyapunov dimension is aninteger means that the system has periodic motion Whenparameter Ω increases beyond the bifurcation point (such aswhen Ω = 7964 rads) the Lyapunov exponents are 1205821 =00054396 and 1205822 = minus0092153 and the Lyapunov dimensionis 119889119871 = 1059 In this case the Lyapunov dimension is notan integer indicating that the system exhibits chaotic mo-tion
6 Controlling Chaos
Improving the performance of a dynamic system andoravoiding chaotic behavior require periodic motion whichis more important when working under specific conditionsCai et al [26] suggested a simple effective control methodthat converts chaotic motions into periodic motion usingthe linear state feedback as a system variable This approach
10 Journal of Advanced Transportation
G = minus014
minus045 minus04 minus035 minus03 minus025 minus02 minus015 minus01 minus005 0minus05Feedback gain G
minus05minus04minus03minus02minus01
00102030405
Disp
lace
men
t (m
)
Figure 16The bifurcation diagram for a system with state feedbackcontrol where 119866 denotes the feedback gain
to achieving an n-dimensional dynamic system is explainedbriefly as follows
= 119891 (119909 119905) (20)
where 119909(119905) isin 119877119899 is the state vector and 119891 =(1198911 119891119894 119891119899) where 119891119894 is a linear or a nonlinearfunction and 119891 includes at least one nonlinear function If119891119896(119909 119905) is a nonlinear function that gives chaotic motionin (20) then only one term of the state feedback for theavailable system variable 119909119898 is added to the equation thatincludes 119891119896 as follows
119896 = 119891119896 (119909 119905) + 119866119909119898 119896 119898 isin 1 2 119899 (21)
where119866 is the feedback gain Other functions remain in theiroriginal forms
System (3) with state feedback control can be written asfollows
1198891199101119889119905 = 11991021198891199102119889119905 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023
+ 119886Ω2 sin (Ω119905) + 1198661199102(22)
In the absence of state feedback control G = 0 and (3)describes chaotic motion when Ω = 7964 rads Figure 16shows the resulting bifurcation diagram for a system withstate feedback control This figure clearly shows that chaoticmotion occurs at approximately 119866 gt minus014 and disappearsat approximately 119866 le minus014 When feedback gain 119866 fallsbelow minus014 stable periodic motion occurs As shown inFigure 17 a control signal is applied to the system at 35 s togovern the chaotic oscillation In this manner state feedbackcontrol can be used to suppress chaotic motion and improvethe performance of a vehiclersquos suspension system The form
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
ControlledUncontrolled
Velo
city
(ms
) 5
0
minus5
Time (sec)80706050403020100
(b)
Figure 17 Transforming chaotic motion to a desired period-oneorbit for 119866 = minus03 and Ω = 7964 rads (a) the phase portraitfor the controlled system when the state feedback control signal isintroduced after 35 s and (b) the time responses of the velocity
of the control gain in the original system equation (1) is asfollows
119866 = 119866 sdot 119898 (23)
The physical meaning of gain 119866 is control gain and the unitof the gain is Nsdotskgsdotm
In many general systems that involve chaotic dynamicsthis state feedback technique does not require preliminaryor on-line analysis of the system dynamics and can beimplemented by adding the feedback of a suitable variable tothe original system with sufficient control gain to suppressthe development of chaos In this regard the state feedbackcontrol technique is simple and effective approach to chaossuppression
7 Conclusions
This study examined the nonlinear dynamic behavior ina vehicle suspension system with hysteretic damping Ourobjective was to develop a method to control chaotic vibra-tion Dynamic behavior was observed over the entire rangeof parameter values of the bifurcation sets and bifurca-tion diagram Using bifurcation analysis we identified acodimension-two bifurcation structure with double-zerodegeneracy in the system The bifurcation diagram indicatesthe existence of quasiperiodic orbit and chaotic motionthereby demonstrating the effectiveness of using Lyapunovexponents as a tool for identifying chaoticmotion Finally weproposed a state feedback control method to suppress chaoticmotions and improve the ride provided by an automotivesuspension system Simulation results confirm the feasibilityof the proposed method Our results provide insight intothe operating conditions under which undesirable dynamicmotion takes place in vehicle suspension systems Our results
Journal of Advanced Transportation 11
also provide a useful reference for engineers involved in thedesign of control systems for vehicle suspensions It shouldbe noted that in practical engineering phenomena such asactuator faults time-varying delays unmodeled dynamicsand dynamics disturbances often occur simultaneously andthese problems are beyond the scope of the current study Infuture work we will seek to control nonlinear systems withtime-varying delays
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The authors would like to thank the Ministry of Science andTechnology of the Republic of China Taiwan for financiallysupporting this research under Contract noMOST 105-2221-E-212-016
References
[1] H Chen Z-Y Liu and P-Y Sun ldquoApplication of constrainedscript Hinfin control to active suspension systems on half-carmodelsrdquo Journal of Dynamic Systems Measurement and Con-trol vol 127 no 3 pp 345ndash354 2005
[2] X Song M Ahmadian S Southward and L Miller ldquoParamet-ric study of nonlinear adaptive control algorithmwithmagneto-rheological suspension systemsrdquo Communications in NonlinearScience and Numerical Simulation vol 12 no 4 pp 584ndash6072007
[3] L-M Gui W-K Shi and W Liu ldquoA semi-active suspensiondesign for off-road vehicle base on Magneto-rheological tech-nologyrdquo in Proceedings of the 2012 9th International Conferenceon Fuzzy Systems and Knowledge Discovery FSKD 2012 pp2565ndash2568 China May 2012
[4] F Tu Q Yang C He and L Wang ldquoExperimental Study andDesign on Automobile SuspensionMade of Magneto-Rheolog-ical Damperrdquo in Proceedings of the International Conference onFuture Energy Environment andMaterials FEEM2012 pp 417ndash425 Hong Kong April 2012
[5] P W Nugroho H Du W Li and G Alici ldquoImplementation ofAdaptive Neuro Fuzzy Inference System controller on magnetorheological damper suspensionrdquo in Proceedings of the 2013IEEEASME International Conference on Advanced IntelligentMechatronicsMechatronics forHumanWellbeing AIM2013 pp1399ndash1403 Australia July 2013
[6] Arnold VI Geometric Methods in the Theory of OrdinaryDifferential Equations New York Springer-Verlag 1988
[7] P J Holmes ldquoBifurcations to divergence and flutter in flow-induced oscillations a finite dimensional analysisrdquo Journal ofSound and Vibration vol 53 no 4 pp 471ndash503 1977
[8] J Guckenheimer and P J Holmes Nonlinear OscillationsDynamical System and Bifurcation of Vector Fields Springer-Verlag New York 2013
[9] C-Y Tseng and P-C Tung ldquoDynamics of nonlinear structurewithmagnetic actuatorrdquo Japanese Journal of Applied Physics vol34 no 1 pp 374ndash382 1995
[10] K Yagasaki ldquoCodimension-two bifurcations in a pendulumwith feedback controlrdquo International Journal of Non-LinearMechanics vol 34 no 6 pp 983ndash1002 1999
[11] R Tian Q Cao and S Yang ldquoThe codimension-two bifurcationfor the recent proposed SD oscillatorrdquoNonlinear Dynamics vol59 no 1-2 pp 19ndash27 2010
[12] S Yin P Shi and H Yang ldquoAdaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems With UnmodeledDynamicsrdquo IEEE Transactions on Cybernetics vol 46 no 8 pp1926ndash1938 2016
[13] S Yin H Yang H Gao J Qiu and O Kaynak ldquoAn adaptiveNN-based approach for fault-tolerant control of nonlineartime-varying delay systems with unmodeled dynamicsrdquo IEEETransactions on Neural Networks and Learning Systems vol 28no 8 pp 1902ndash1913 2017
[14] S Li S Yang and W Guo ldquoInvestigation on chaotic motion inhysteretic non-linear suspension system with multi-frequencyexcitationsrdquoMechanics Research Communications vol 31 no 2pp 229ndash236 2004
[15] R D Naik and P M Singru ldquoResonance stability and chaoticvibration of a quarter-car vehicle model with time-delay feed-backrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 8 pp 3397ndash3410 2011
[16] M Borowiec G Litak and M I Friswell ldquoNonlinear responseof an oscillator with a magneto-rheological damper subjectedto external forcingrdquo Applied Mechanics and Materials vol 5-6pp 277ndash284 2006
[17] G Litak M Borowiec M I Friswell and K Szabelski ldquoChaoticvibration of a quarter-car model excited by the road surfaceprofilerdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 7 pp 1373ndash1383 2008
[18] J Marzbanrad and A Keshavarzi ldquoChaotic vibrations of anonlinear air suspension system under consecutive half sinespeed bumprdquo Indian Journal of Science and Technology vol 8pp 72ndash84 2015
[19] J Marzbanrad and A Keshavarzi ldquoA Chaotic viewpoint on aquarter-car air suspension model with numerical and experi-mental analysis[J]rdquo Journal of Cahiers Des Sciences vol 23 2014
[20] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[21] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[22] E R Hunt ldquoStabilizing high-period orbits in a chaotic systemthe diode resonatorrdquo Physical Review Letters vol 67 no 15 pp1953ndash1955 1991
[23] C Cai Z XuW Xu and B Feng ldquoNotch filter feedback controlin a class of chaotic systemsrdquoAutomatica vol 38 no 4 pp 695ndash701 2002
[24] G Litak M Borowiec M Ali L M Saha and M I FriswellldquoPulsive feedback control of a quarter car model forced by aroad profilerdquo Chaos Solitons amp Fractals vol 33 no 5 pp 1672ndash1676 2007
[25] H Du K Y Sze and J Lam ldquoSemi-active 119867infin control ofvehicle suspensionwithmagneto-rheological dampersrdquo Journalof Sound and Vibration vol 283 no 3ndash5 pp 981ndash996 2005
[26] C Cai Z Xu and W Xu ldquoConverting chaos into periodicmotion by state feedback controlrdquo Automatica vol 38 no 11pp 1927ndash1933 2002
[27] M Ashkenazi and S-N Chow ldquoNormal forms near criticalpoints for differential equations and mapsrdquo IEEE Transactions
12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

10 Journal of Advanced Transportation
G = minus014
minus045 minus04 minus035 minus03 minus025 minus02 minus015 minus01 minus005 0minus05Feedback gain G
minus05minus04minus03minus02minus01
00102030405
Disp
lace
men
t (m
)
Figure 16The bifurcation diagram for a system with state feedbackcontrol where 119866 denotes the feedback gain
to achieving an n-dimensional dynamic system is explainedbriefly as follows
= 119891 (119909 119905) (20)
where 119909(119905) isin 119877119899 is the state vector and 119891 =(1198911 119891119894 119891119899) where 119891119894 is a linear or a nonlinearfunction and 119891 includes at least one nonlinear function If119891119896(119909 119905) is a nonlinear function that gives chaotic motionin (20) then only one term of the state feedback for theavailable system variable 119909119898 is added to the equation thatincludes 119891119896 as follows
119896 = 119891119896 (119909 119905) + 119866119909119898 119896 119898 isin 1 2 119899 (21)
where119866 is the feedback gain Other functions remain in theiroriginal forms
System (3) with state feedback control can be written asfollows
1198891199101119889119905 = 11991021198891199102119889119905 = minus12059621199101 minus 119861111991013 minus 11986121199102 minus 119861311991023
+ 119886Ω2 sin (Ω119905) + 1198661199102(22)
In the absence of state feedback control G = 0 and (3)describes chaotic motion when Ω = 7964 rads Figure 16shows the resulting bifurcation diagram for a system withstate feedback control This figure clearly shows that chaoticmotion occurs at approximately 119866 gt minus014 and disappearsat approximately 119866 le minus014 When feedback gain 119866 fallsbelow minus014 stable periodic motion occurs As shown inFigure 17 a control signal is applied to the system at 35 s togovern the chaotic oscillation In this manner state feedbackcontrol can be used to suppress chaotic motion and improvethe performance of a vehiclersquos suspension system The form
Velo
city
(ms
)
4
2
0
minus4
minus2
040201 030minus02minus04 minus03 minus01
Displacement (m)
(a)
ControlledUncontrolled
Velo
city
(ms
) 5
0
minus5
Time (sec)80706050403020100
(b)
Figure 17 Transforming chaotic motion to a desired period-oneorbit for 119866 = minus03 and Ω = 7964 rads (a) the phase portraitfor the controlled system when the state feedback control signal isintroduced after 35 s and (b) the time responses of the velocity
of the control gain in the original system equation (1) is asfollows
119866 = 119866 sdot 119898 (23)
The physical meaning of gain 119866 is control gain and the unitof the gain is Nsdotskgsdotm
In many general systems that involve chaotic dynamicsthis state feedback technique does not require preliminaryor on-line analysis of the system dynamics and can beimplemented by adding the feedback of a suitable variable tothe original system with sufficient control gain to suppressthe development of chaos In this regard the state feedbackcontrol technique is simple and effective approach to chaossuppression
7 Conclusions
This study examined the nonlinear dynamic behavior ina vehicle suspension system with hysteretic damping Ourobjective was to develop a method to control chaotic vibra-tion Dynamic behavior was observed over the entire rangeof parameter values of the bifurcation sets and bifurca-tion diagram Using bifurcation analysis we identified acodimension-two bifurcation structure with double-zerodegeneracy in the system The bifurcation diagram indicatesthe existence of quasiperiodic orbit and chaotic motionthereby demonstrating the effectiveness of using Lyapunovexponents as a tool for identifying chaoticmotion Finally weproposed a state feedback control method to suppress chaoticmotions and improve the ride provided by an automotivesuspension system Simulation results confirm the feasibilityof the proposed method Our results provide insight intothe operating conditions under which undesirable dynamicmotion takes place in vehicle suspension systems Our results
Journal of Advanced Transportation 11
also provide a useful reference for engineers involved in thedesign of control systems for vehicle suspensions It shouldbe noted that in practical engineering phenomena such asactuator faults time-varying delays unmodeled dynamicsand dynamics disturbances often occur simultaneously andthese problems are beyond the scope of the current study Infuture work we will seek to control nonlinear systems withtime-varying delays
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The authors would like to thank the Ministry of Science andTechnology of the Republic of China Taiwan for financiallysupporting this research under Contract noMOST 105-2221-E-212-016
References
[1] H Chen Z-Y Liu and P-Y Sun ldquoApplication of constrainedscript Hinfin control to active suspension systems on half-carmodelsrdquo Journal of Dynamic Systems Measurement and Con-trol vol 127 no 3 pp 345ndash354 2005
[2] X Song M Ahmadian S Southward and L Miller ldquoParamet-ric study of nonlinear adaptive control algorithmwithmagneto-rheological suspension systemsrdquo Communications in NonlinearScience and Numerical Simulation vol 12 no 4 pp 584ndash6072007
[3] L-M Gui W-K Shi and W Liu ldquoA semi-active suspensiondesign for off-road vehicle base on Magneto-rheological tech-nologyrdquo in Proceedings of the 2012 9th International Conferenceon Fuzzy Systems and Knowledge Discovery FSKD 2012 pp2565ndash2568 China May 2012
[4] F Tu Q Yang C He and L Wang ldquoExperimental Study andDesign on Automobile SuspensionMade of Magneto-Rheolog-ical Damperrdquo in Proceedings of the International Conference onFuture Energy Environment andMaterials FEEM2012 pp 417ndash425 Hong Kong April 2012
[5] P W Nugroho H Du W Li and G Alici ldquoImplementation ofAdaptive Neuro Fuzzy Inference System controller on magnetorheological damper suspensionrdquo in Proceedings of the 2013IEEEASME International Conference on Advanced IntelligentMechatronicsMechatronics forHumanWellbeing AIM2013 pp1399ndash1403 Australia July 2013
[6] Arnold VI Geometric Methods in the Theory of OrdinaryDifferential Equations New York Springer-Verlag 1988
[7] P J Holmes ldquoBifurcations to divergence and flutter in flow-induced oscillations a finite dimensional analysisrdquo Journal ofSound and Vibration vol 53 no 4 pp 471ndash503 1977
[8] J Guckenheimer and P J Holmes Nonlinear OscillationsDynamical System and Bifurcation of Vector Fields Springer-Verlag New York 2013
[9] C-Y Tseng and P-C Tung ldquoDynamics of nonlinear structurewithmagnetic actuatorrdquo Japanese Journal of Applied Physics vol34 no 1 pp 374ndash382 1995
[10] K Yagasaki ldquoCodimension-two bifurcations in a pendulumwith feedback controlrdquo International Journal of Non-LinearMechanics vol 34 no 6 pp 983ndash1002 1999
[11] R Tian Q Cao and S Yang ldquoThe codimension-two bifurcationfor the recent proposed SD oscillatorrdquoNonlinear Dynamics vol59 no 1-2 pp 19ndash27 2010
[12] S Yin P Shi and H Yang ldquoAdaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems With UnmodeledDynamicsrdquo IEEE Transactions on Cybernetics vol 46 no 8 pp1926ndash1938 2016
[13] S Yin H Yang H Gao J Qiu and O Kaynak ldquoAn adaptiveNN-based approach for fault-tolerant control of nonlineartime-varying delay systems with unmodeled dynamicsrdquo IEEETransactions on Neural Networks and Learning Systems vol 28no 8 pp 1902ndash1913 2017
[14] S Li S Yang and W Guo ldquoInvestigation on chaotic motion inhysteretic non-linear suspension system with multi-frequencyexcitationsrdquoMechanics Research Communications vol 31 no 2pp 229ndash236 2004
[15] R D Naik and P M Singru ldquoResonance stability and chaoticvibration of a quarter-car vehicle model with time-delay feed-backrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 8 pp 3397ndash3410 2011
[16] M Borowiec G Litak and M I Friswell ldquoNonlinear responseof an oscillator with a magneto-rheological damper subjectedto external forcingrdquo Applied Mechanics and Materials vol 5-6pp 277ndash284 2006
[17] G Litak M Borowiec M I Friswell and K Szabelski ldquoChaoticvibration of a quarter-car model excited by the road surfaceprofilerdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 7 pp 1373ndash1383 2008
[18] J Marzbanrad and A Keshavarzi ldquoChaotic vibrations of anonlinear air suspension system under consecutive half sinespeed bumprdquo Indian Journal of Science and Technology vol 8pp 72ndash84 2015
[19] J Marzbanrad and A Keshavarzi ldquoA Chaotic viewpoint on aquarter-car air suspension model with numerical and experi-mental analysis[J]rdquo Journal of Cahiers Des Sciences vol 23 2014
[20] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[21] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[22] E R Hunt ldquoStabilizing high-period orbits in a chaotic systemthe diode resonatorrdquo Physical Review Letters vol 67 no 15 pp1953ndash1955 1991
[23] C Cai Z XuW Xu and B Feng ldquoNotch filter feedback controlin a class of chaotic systemsrdquoAutomatica vol 38 no 4 pp 695ndash701 2002
[24] G Litak M Borowiec M Ali L M Saha and M I FriswellldquoPulsive feedback control of a quarter car model forced by aroad profilerdquo Chaos Solitons amp Fractals vol 33 no 5 pp 1672ndash1676 2007
[25] H Du K Y Sze and J Lam ldquoSemi-active 119867infin control ofvehicle suspensionwithmagneto-rheological dampersrdquo Journalof Sound and Vibration vol 283 no 3ndash5 pp 981ndash996 2005
[26] C Cai Z Xu and W Xu ldquoConverting chaos into periodicmotion by state feedback controlrdquo Automatica vol 38 no 11pp 1927ndash1933 2002
[27] M Ashkenazi and S-N Chow ldquoNormal forms near criticalpoints for differential equations and mapsrdquo IEEE Transactions
12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 11
also provide a useful reference for engineers involved in thedesign of control systems for vehicle suspensions It shouldbe noted that in practical engineering phenomena such asactuator faults time-varying delays unmodeled dynamicsand dynamics disturbances often occur simultaneously andthese problems are beyond the scope of the current study Infuture work we will seek to control nonlinear systems withtime-varying delays
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The authors would like to thank the Ministry of Science andTechnology of the Republic of China Taiwan for financiallysupporting this research under Contract noMOST 105-2221-E-212-016
References
[1] H Chen Z-Y Liu and P-Y Sun ldquoApplication of constrainedscript Hinfin control to active suspension systems on half-carmodelsrdquo Journal of Dynamic Systems Measurement and Con-trol vol 127 no 3 pp 345ndash354 2005
[2] X Song M Ahmadian S Southward and L Miller ldquoParamet-ric study of nonlinear adaptive control algorithmwithmagneto-rheological suspension systemsrdquo Communications in NonlinearScience and Numerical Simulation vol 12 no 4 pp 584ndash6072007
[3] L-M Gui W-K Shi and W Liu ldquoA semi-active suspensiondesign for off-road vehicle base on Magneto-rheological tech-nologyrdquo in Proceedings of the 2012 9th International Conferenceon Fuzzy Systems and Knowledge Discovery FSKD 2012 pp2565ndash2568 China May 2012
[4] F Tu Q Yang C He and L Wang ldquoExperimental Study andDesign on Automobile SuspensionMade of Magneto-Rheolog-ical Damperrdquo in Proceedings of the International Conference onFuture Energy Environment andMaterials FEEM2012 pp 417ndash425 Hong Kong April 2012
[5] P W Nugroho H Du W Li and G Alici ldquoImplementation ofAdaptive Neuro Fuzzy Inference System controller on magnetorheological damper suspensionrdquo in Proceedings of the 2013IEEEASME International Conference on Advanced IntelligentMechatronicsMechatronics forHumanWellbeing AIM2013 pp1399ndash1403 Australia July 2013
[6] Arnold VI Geometric Methods in the Theory of OrdinaryDifferential Equations New York Springer-Verlag 1988
[7] P J Holmes ldquoBifurcations to divergence and flutter in flow-induced oscillations a finite dimensional analysisrdquo Journal ofSound and Vibration vol 53 no 4 pp 471ndash503 1977
[8] J Guckenheimer and P J Holmes Nonlinear OscillationsDynamical System and Bifurcation of Vector Fields Springer-Verlag New York 2013
[9] C-Y Tseng and P-C Tung ldquoDynamics of nonlinear structurewithmagnetic actuatorrdquo Japanese Journal of Applied Physics vol34 no 1 pp 374ndash382 1995
[10] K Yagasaki ldquoCodimension-two bifurcations in a pendulumwith feedback controlrdquo International Journal of Non-LinearMechanics vol 34 no 6 pp 983ndash1002 1999
[11] R Tian Q Cao and S Yang ldquoThe codimension-two bifurcationfor the recent proposed SD oscillatorrdquoNonlinear Dynamics vol59 no 1-2 pp 19ndash27 2010
[12] S Yin P Shi and H Yang ldquoAdaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems With UnmodeledDynamicsrdquo IEEE Transactions on Cybernetics vol 46 no 8 pp1926ndash1938 2016
[13] S Yin H Yang H Gao J Qiu and O Kaynak ldquoAn adaptiveNN-based approach for fault-tolerant control of nonlineartime-varying delay systems with unmodeled dynamicsrdquo IEEETransactions on Neural Networks and Learning Systems vol 28no 8 pp 1902ndash1913 2017
[14] S Li S Yang and W Guo ldquoInvestigation on chaotic motion inhysteretic non-linear suspension system with multi-frequencyexcitationsrdquoMechanics Research Communications vol 31 no 2pp 229ndash236 2004
[15] R D Naik and P M Singru ldquoResonance stability and chaoticvibration of a quarter-car vehicle model with time-delay feed-backrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 8 pp 3397ndash3410 2011
[16] M Borowiec G Litak and M I Friswell ldquoNonlinear responseof an oscillator with a magneto-rheological damper subjectedto external forcingrdquo Applied Mechanics and Materials vol 5-6pp 277ndash284 2006
[17] G Litak M Borowiec M I Friswell and K Szabelski ldquoChaoticvibration of a quarter-car model excited by the road surfaceprofilerdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 7 pp 1373ndash1383 2008
[18] J Marzbanrad and A Keshavarzi ldquoChaotic vibrations of anonlinear air suspension system under consecutive half sinespeed bumprdquo Indian Journal of Science and Technology vol 8pp 72ndash84 2015
[19] J Marzbanrad and A Keshavarzi ldquoA Chaotic viewpoint on aquarter-car air suspension model with numerical and experi-mental analysis[J]rdquo Journal of Cahiers Des Sciences vol 23 2014
[20] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[21] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[22] E R Hunt ldquoStabilizing high-period orbits in a chaotic systemthe diode resonatorrdquo Physical Review Letters vol 67 no 15 pp1953ndash1955 1991
[23] C Cai Z XuW Xu and B Feng ldquoNotch filter feedback controlin a class of chaotic systemsrdquoAutomatica vol 38 no 4 pp 695ndash701 2002
[24] G Litak M Borowiec M Ali L M Saha and M I FriswellldquoPulsive feedback control of a quarter car model forced by aroad profilerdquo Chaos Solitons amp Fractals vol 33 no 5 pp 1672ndash1676 2007
[25] H Du K Y Sze and J Lam ldquoSemi-active 119867infin control ofvehicle suspensionwithmagneto-rheological dampersrdquo Journalof Sound and Vibration vol 283 no 3ndash5 pp 981ndash996 2005
[26] C Cai Z Xu and W Xu ldquoConverting chaos into periodicmotion by state feedback controlrdquo Automatica vol 38 no 11pp 1927ndash1933 2002
[27] M Ashkenazi and S-N Chow ldquoNormal forms near criticalpoints for differential equations and mapsrdquo IEEE Transactions
12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

12 Journal of Advanced Transportation
on Circuits and Systems II Express Briefs vol 35 no 7 pp 850ndash862 1988
[28] Y N Bibikov Local theory of nonlinear analytic ordinary dif-ferential equations vol 702 of Lecture Notes in MathematicsSpringer-Verlag Berlin 1979
[29] L O Chu andH Kokubu ldquoNormal Forms for Nonlinear VectorFieldsmdash Part I Theory and Algorithmrdquo IEEE Transactions onCircuits and Systems II Express Briefs vol 35 no 7 pp 863ndash8801988
[30] P Holmes ldquodynamics of a nonlinear oscillator with feedbackcontrol i local analysisrdquo Journal of Dynamic Systems Measure-ment and Control vol 107 no 2 pp 159ndash165 1985
[31] IMSL Inc Users Manual IMSL MATHLIBRARY 1989[32] J L Kaplan and J A Yorke ldquoChaotic behavior of multidimen-
sional difference equationsrdquo inFunctionalDifferential Equationsand Approximation of Fixed Points (Proc Summer School andConf Univ Bonn Bonn 1978) vol 730 of Lecture Notes inMath pp 204ndash227 Springer Berlin Germany 1979
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom